EBD EBV电子制动力分配系统
电子制动力分配系统( EBD/EBV)
第一节概述
EBD即Electronic Brake - force Distribution的英文简称,其含义是电子制动力分配系统。当汽车制动时产生汽车重心的移动,为了发挥最佳制动效果,各车轮根据载重需要有效的分配制动力。前后轮同时抱死的制动力分配叫做理想制动力分配。
当车轮抱死滑移时,车轮与路面间的侧向附着力完全消失。如果只是前轮(转向轮)制动到抱死滑移而后轮还在滚动,汽车将失去转向能力;如
果只是后轮制动到抱死滑移而前轮还在滚动,即使受到侧
向干扰力,汽车也
将产生侧滑(甩尾)现象。这些都极易造成严重的交
通事故。
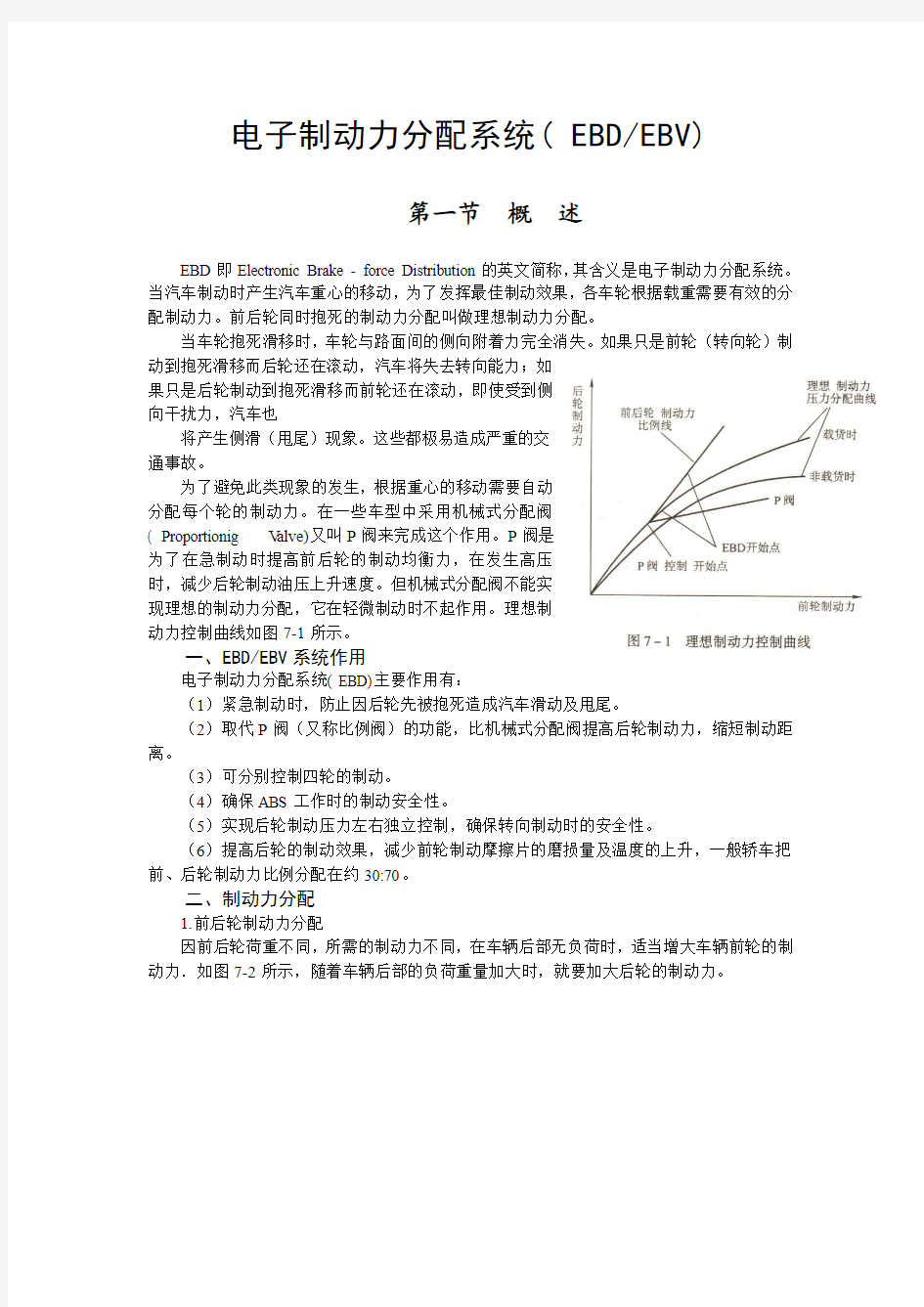
为了避免此类现象的发生,根据重心的移动需要自动
分配每个轮的制动力。在一些车型中采用机械式分配阀
( Proportionig V alve)又叫P阀来完成这个作用。P阀是
为了在急制动时提高前后轮的制动均衡力,在发生高压
时,减少后轮制动油压上升速度。但机械式分配阀不能实
现理想的制动力分配,它在轻微制动时不起作用。理想制
动力控制曲线如图7-1所示。
一、EBD/EBV系统作用
电子制动力分配系统( EBD)主要作用有:
(1)紧急制动时,防止因后轮先被抱死造成汽车滑动及甩尾。
(2)取代P阀(又称比例阀)的功能,比机械式分配阀提高后轮制动力,缩短制动距离。
(3)可分别控制四轮的制动。
(4)确保ABS工作时的制动安全性。
(5)实现后轮制动压力左右独立控制,确保转向制动时的安全性。
(6)提高后轮的制动效果,减少前轮制动摩擦片的磨损量及温度的上升,一般轿车把前、后轮制动力比例分配在约30:70。
二、制动力分配
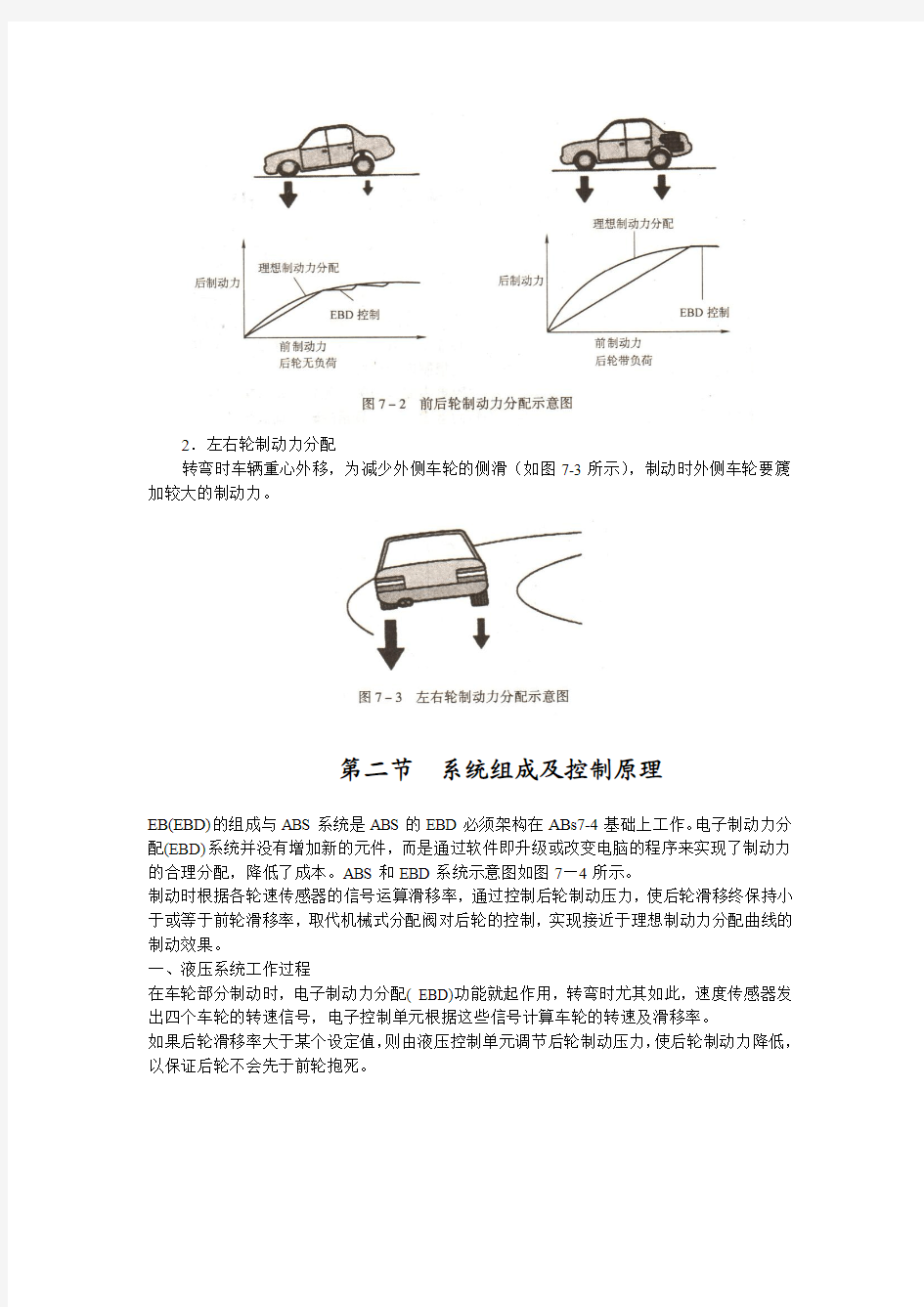
1.前后轮制动力分配
因前后轮荷重不同,所需的制动力不同,在车辆后部无负荷时,适当增大车辆前轮的制动力.如图7-2所示,随着车辆后部的负荷重量加大时,就要加大后轮的制动力。
2.左右轮制动力分配
转弯时车辆重心外移,为减少外侧车轮的侧滑(如图7-3所示),制动时外侧车轮要篪
加较大的制动力。
第二节系统组成及控制原理
EB(EBD)的组成与ABS系统是ABS的EBD必须架构在ABs7-4基础上工作。电子制动力分
配(EBD)系统并没有增加新的元件,而是通过软件即升级或改变电脑的程序来实现了制动力的合理分配,降低了成本。ABS和EBD系统示意图如图7—4所示。
制动时根据各轮速传感器的信号运算滑移率,通过控制后轮制动压力,使后轮滑移终保持小于或等于前轮滑移率,取代机械式分配阀对后轮的控制,实现接近于理想制动力分配曲线的制动效果。
一、液压系统工作过程
在车轮部分制动时,电子制动力分配( EBD)功能就起作用,转弯时尤其如此,速度传感器发
出四个车轮的转速信号,电子控制单元根据这些信号计算车轮的转速及滑移率。
如果后轮滑移率大于某个设定值,则由液压控制单元调节后轮制动压力,使后轮制动力降低,
以保证后轮不会先于前轮抱死。
同传统的制动力分配方式(如比例阀)相比,电子制动力分配( EBD)功能保证了较高的车轮附着力以及合理的制动力分配。当ABS起作用时,电子制动力分配(EBD)即停止工作。
EBD降压工作图如图7-5所示。
二、减速度传感器
1.安装位置
减速度传感器(G - SENSOR) -般安装在差速器里或中控台下,如图7-6所示。
2.作用
判断制动时车辆的减速度,调整制动性能,提高ABS的工作准确度,损坏后无明显故
障,但是ABS灯会点亮。
3.形式
其形式有三种:光电式、水银式、差压阀式。
4.检测方法
输出电压范围:0~ 5.OV。
ECU输入电压范围:0.5~ 4.5V。
传感器一般采用三条导线,分别是:
电源线+5V、搭铁线和信号线1~4V。
三、警告灯控制
EBD警告灯位置如图7-7所示。
1.ABS警告灯
在下列情况中,ABS警告灯会亮。
A.当点火开关打到ON时,ABS警告灯亮3s;
B.ABS系统发生异常时亮;
C.自我诊断中亮;
D.拆下ECU连接器时亮。
2.EBD警告灯
当点火开关打到0N位置时,EBD警告灯亮3s;当不能进行EBD控制时,EBD警告灯也会点亮。
3.ABS/EBD继电器安装位置(如图7-8所示)
第三节系统故障诊断
一、ABS故障的下列情况下EBD能确保稳定的工作
1个轮速传感器故障;电动泵故障;低电压时。
机械式分配阀故障时,因没有警告装置驾驶员无法判断故障,所以容易造成急制动时甩尾现象;EBD故障时,及时点亮警告灯确保得到有效的故障排除。
二、制动系统失效模式
如果车轮转速传感器出现故障,ABS警告灯、IRC/ESP警告灯将亮起,ABS、IRC、ESP 系统均停止工作,但EBD系统仍工作。表7-1为制动系统失效模式数据表。
刹车制动力分配试验方法09
编制部门:技术部文件编号:SAF-P009 XXXX汽车工业有限公司 刹车制动力分配试验方法 第(1)版 编制:日期:年月日 审核:日期:年月日 批准:日期:年月日发布日期:2004年月日实施日期:2004年月日
刹车制动力分配试验方法修订一览表 页次 1/1 版次 日 期 修订人 修订页次 修订内容概述 第一版 2004/11/4 新出
1、目的 本标准是测定车辆的前轮及后轮制动力分配的相关试验方法。 2、适用范围 乘用车、商用车。 3、试验方法 3.1.试验条件 3.1.1.供试部品 (1)蹄片(PAD)、刹车碟片(ROTOR)、来令(LINING)及刹车鼓(DRUM),在试验时原则上使用新品,但开发需要时PAD的μ值,LINING的BEF值已知品亦可实施; (2)车装置需符合正规式样、并具有正常机能。 3.1.2.供试车辆 (1)车辆之重量在同一车型、同一刹车规格中,取最大的积载(G.V.W.)重量式样实施, 重量包含试验人员及试验用计测器的状态,但LOCK试验时为1名成员状态的重量分配; (2)使用标准装配之轮胎,必要时选用件轮胎亦实施,胎压为一般道路走行之正规胎压。 3.1.3.路面及气象 (1)试验路为标准铺装良好路面(如水泥路等); (2)需为干燥的路面。 3.1. 4.计测器 (1)数字显示型温度计; (2)踏力及液压SENSOR及踏力或液压指示计; (3)U-字管(减速度计); (4)车轮扭力计(Wheel Torque meters); (5)信号放大器; (6)AR1100或相当的记录器。 3.2.试验方法 试验时需注意以下要点 (1)原则上需要磨合200回,但如有必要于PAD及LINING于新品时、磨合途中及热履历 后亦可; (2)试验时需监测和记录PAD和LINING温度; (3)以得到图1减速度的波形来操作刹车踏板,但车辆在车轮锁死(LOCK)的条件下得到如图2的波形亦可。
前后制动器制动力分配 - 前后制动器制动力分配
第四章 汽车制动性 第四节 制动力分配 一、制动力分配要求 根据制动稳定性的要求,前轮的附着率应大于后轮,即b1b2j j >,也就是说μ1 1μ22Z Z F F F F >制动方向稳定性的极限条件为: g g 210μ12g 1g g 1μ221g 20Z Z Z Z h h l F mg z z F l h z F l l l h h l F F l h z F mg z z l l l +++====--- (4-16)式中:μ1F 、μ2F —前、后轮的理想制动力。 又由式(4-14),得: μ2μ1F F z mg mg =- (4-17) 当给定一个μ1 F mg 值,即可从式(4-16)和(4-17)求出z 值和μ2 F mg 值,这样就可得出如图4- 16所示制动方向稳定性极限曲线。制动力处于该曲线上时,可使车辆制动距离最短,是理想的前后制动器制动力分配曲线,称为I 线。欧洲制动法规规定,轿车在0.150.8z ??范围内应满足b1b2j j >的要求。只要车辆制动力分配处于I 线下方,就可保证前轮先抱死,使车辆处于制动稳定状态。
图4-16 稳定性界限(I 曲线)和最大制动距离界限 为使制动距离不至于过长,上述法规又要求满足: p 0.10.85(0.2)z j ?+- (4-18) 因为在I 线下方,前轮先达到峰值附着率,这时前轴制动力为: 21p ()g h l F mg z l l m j =+ (4-19)给定p j 值,即可从式(4-18)求出z 取值范围,由式(4-19)得到μ1 F mg 的范围,随即从式(4- 17)求得μ2 F mg 的范围,这样可在图4-16上画出制动距离允许的极限曲线。 车辆前后轴制动力分配不得超越上述两条极限曲线。对于前后轴制动力定比分配的车辆,有: μ2 μμ2μ1F k F F =+; μ2μμ1μ1F k F mg k mg =- (4-20)式中:μk 为常数,是前后轴制动力的分配比。
制动力分配调节装置
前后轮制动力分配的调节装置 一、概述 1.目的 如本章第一节所述,最大制动力f bmax,受轮胎与地面之间附着力fψ的限制。即: f ≤fψ=gψ bma x 当f b一旦等于fψ后,车轮便停止转动被“抱死”,而在地面上滑拖。制动管路中的工作压力再增大,也不可能使制动力f b增加。车轮一旦抱死便会失去抗侧滑的能力。如前轮抱死时,会使汽车失去方向操纵性,无法转向;如后轮抱死而前轮滚动时,会使汽车失去方向稳定性,丧失了对侧向力的抵抗能力而侧滑(甩尾),造成极为严重的恶果。可见,后轮抱死的危险性远大于前轮。因此,要使汽车既能得到尽可能大的制动力,又能保持行驶方向的操纵性和稳定性(不失控、不甩尾),即最佳制动状态,就必须使汽车前后轮同时达到“抱死”的边缘。其同步条件是:前后车轮制动力之比等于前后车轮对路面垂直载荷之比。 但是,随着装载量不同和汽车制动时减速度所引起载荷的转移不同,汽车前后车轮的实际垂直载荷比是变化的。因此,要满足最佳制动状态的条件,汽车前后轮制动力的比例也应是变化的。 2.前后轮制动管路压力分配特性曲线 (1)无制动力调节装置的汽车,其前后车轮控制管路的工作压力p1、p2基本是相等的,其压力比p2/ p1永远等于1(如图20-71虚线所示)。这就使得不论前后车轮制动器的型式、尺寸如何不同,但制动力的分配比例却永远是个常数,不可能使汽车在各种条件下都能获得最佳的制动状态。
图20-71 理想的前后轮制动管路压力分配特性曲线 p1-前轮制动管路中的压力;p2-后轮制动管路中的压力;c-质心 (2)理想的前后轮制动管路压力分配特性曲线如图20-71实线所示。由于汽车满载较空载时质心c后移,p2应相应增加,故其曲线较空载曲线上移。又因制动强度的增加(即工作压力p的增加),质心向前转移程度的增加,压力比p2/ p1应相应减小(小于1),故随压力p1的增加,曲线变得平缓。 为满足上述理想特性的要求,在一些汽车上采用了各种制动力调节装置,来调节前后车轮制动管路中的工作压力。常用的有限压阀、比例阀和感载比例阀。 二、液压式限压阀 1.安装位置 限压阀是一种最简单的压力调节阀,串联在制动主缸与后轮制动器的管路之间。 2.作用 它的作用是当前后制动管路压力p1和p2由零同步增长到一定值后,即自动将后轮制动器管路中的液压限定在该值不变,防止后轮抱死。
制动系统匹配设计计算分解
制动系统匹配设计计算 根据AA车型整车开发计划,AA车型制动系统在参考BB轿车底盘制造平台的基础上进行逆向开发设计,管路重新设计。本计算是以选配C发动机为基础。 AA车型的行车制动系统采用液压制动系统。前、后制动器分别为前通风盘式制动器和实心盘式制动器,制动踏板为吊挂式踏板,带真空助力器,制动管路为双回路对角线(X型)布置,采用ABS。驻车制动系统为机械式手动后盘式制动,采用远距离棘轮拉索操纵机构。因AA车型与参考样车BB的整车参数接近,制动系统采用了BB样车制动系统,因此,计算的目的在于校核前/后制动力、最大制动距离、制动踏板力、驻车制动手柄力及驻坡极限倾角。 设计要符合GB 12676-1999《汽车制动系统结构、性能和试验方法》;GB 13594-2003《机动车和挂车防抱制动性能和试验方法》和GB 7258-2004《机动车运行安全技术条件》的要求,其中的踏板力要求≤500N,驻车制动停驻角度为20%(12),驻车制动操纵手柄力≤400N。 制动系统设计的输入条件 整车基本参数见表1,零部件主要参数见表2。 表1 整车基本参数
表2 零部件主要参数制动系统设计计算 1.地面对前、后车轮的法向反作用力 地面对前、后车轮的法向反作用力如图1所示。 图1 制动工况受力简图由图1,对后轮接地点取力矩得:
式中:FZ1(N):地面对前轮的法向反作用力;G(N):汽车重力;b(m):汽车质心至后轴中心线的水平距离;m(kg):汽车质量;hg(m):汽车质心高度;L(m):轴距;(m/s2):汽车减速度。 对前轮接地点取力矩,得: 式中:FZ2(N):地面对后轮的法向反作用力;a(m):汽车质心至前轴中心线的距离。 2.理想前后制动力分配 在附着系数为ψ的路面上,前、后车轮同步抱死的条件是:前、后轮制动器制动力之和等于汽车的地面附着力;并且前、后轮制动器制动力Fm1、Fm2分别等于各自的附着力,即:
EBD EBV电子制动力分配系统
电子制动力分配系统( EBD/EBV) 第一节概述 EBD即Electronic Brake - force Distribution的英文简称,其含义是电子制动力分配系统。当汽车制动时产生汽车重心的移动,为了发挥最佳制动效果,各车轮根据载重需要有效的分配制动力。前后轮同时抱死的制动力分配叫做理想制动力分配。 当车轮抱死滑移时,车轮与路面间的侧向附着力完全消失。如果只是前轮(转向轮)制动到抱死滑移而后轮还在滚动,汽车将失去转向能力;如 果只是后轮制动到抱死滑移而前轮还在滚动,即使受到侧 向干扰力,汽车也 将产生侧滑(甩尾)现象。这些都极易造成严重的交 通事故。 为了避免此类现象的发生,根据重心的移动需要自动 分配每个轮的制动力。在一些车型中采用机械式分配阀 ( Proportionig V alve)又叫P阀来完成这个作用。P阀是 为了在急制动时提高前后轮的制动均衡力,在发生高压 时,减少后轮制动油压上升速度。但机械式分配阀不能实 现理想的制动力分配,它在轻微制动时不起作用。理想制 动力控制曲线如图7-1所示。 一、EBD/EBV系统作用 电子制动力分配系统( EBD)主要作用有: (1)紧急制动时,防止因后轮先被抱死造成汽车滑动及甩尾。 (2)取代P阀(又称比例阀)的功能,比机械式分配阀提高后轮制动力,缩短制动距离。 (3)可分别控制四轮的制动。 (4)确保ABS工作时的制动安全性。 (5)实现后轮制动压力左右独立控制,确保转向制动时的安全性。 (6)提高后轮的制动效果,减少前轮制动摩擦片的磨损量及温度的上升,一般轿车把前、后轮制动力比例分配在约30:70。 二、制动力分配 1.前后轮制动力分配 因前后轮荷重不同,所需的制动力不同,在车辆后部无负荷时,适当增大车辆前轮的制动力.如图7-2所示,随着车辆后部的负荷重量加大时,就要加大后轮的制动力。
制动系统概述
制动系统概述 汽车的制动性是汽车的主要性能之一。自从汽车诞生之日起,汽车的制动性就显得至关重要;并且随着汽车技术的发展和汽车行驶车速的提高,其重要性也显得越来越明显。制动性直接关系到交通安全,重大交通事故往往与制动距离太长、紧急制动时发生侧滑等情况有关。所以,汽车的制动性是汽车行驶的重要保障。下面让我们来了解一下汽车制动系统的几点知识。 一.汽车的制动性及其评价指标 所谓的汽车制动性就是指汽车行驶时能在短距离内停车并且维持行驶方向稳定性和在下长坡时能维持一定车速的能力,以及汽车在一定坡道上能长时间停车不动的驻车制动器性能。汽车的制动性主要由制动效能、制动效能的恒定性和制动时汽车的方向稳定性三方面来评价。 1、制动效能: 即制动距离与制动减速度,是指在良好路面上,汽车以一定初速制动到停车的制动距离或制动时汽车的减速度,是制动性能最基本的评价指标。制动距离与汽车的行驶安全有直接的关系,它指的是汽车空档时以一定初速,从驾驶员踩着制动踏板开始到汽车停止为止所驶过的距离。制动距离与制动踏板力以及路面附着条件有关。制动减速度反映了地面制动力,因此它与制动器制动力(车轮滚动时)及附着力(车轮抱死拖滑时)有关。由于各种汽车动力性不同,对制动效能的要求也就不同:一般轿车、轻型货车的行驶速度高,所以要求其制动效能也高;而重型货车行驶速度相对较低,其制动效能的要求也就稍低一些。 2、制动效能的恒定性: 制动过程实际上是把汽车行驶的动能通过制动器吸收转化为热能,汽车在繁重的工作条件下制动时(例如下长坡长时间、连续制动)或高速制动时,制动器温度常在300°C 以上,有时甚至达到600-700°C,制动器温度上升后,摩擦力矩将显著下降,这种现象就称为制动器的热衰退。所以制动器温度升高后,能否保持在冷状态时的制动效能已成为设计制动器时要考虑的一个重要问题。汽车在高速行驶或下长坡连续制动时制动效能保持的程度,称为抗热衰退性能。制动器抗热衰退性能一般用一系列连续制动时制动效能的保持程度来衡量。根据国际标准草案ISO/DIS6597,要求以一定车速连续制动15次,每次的制动强度为3m/s2,最后的制动效能应不低于规定的冷试验制动效能(5.8m
汽车电子稳定系统(ESP)
汽车电子稳定系统(ESP)( 汽车电子稳定系统或动态偏航稳定控制系统(Electronic Stability Program,ESP)是防抱死制动系统ABS、驱动防滑控制系统ASR、电子制动力分配系统EBD、牵引力控制系统TCS 和主动车身横摆控制系统AYC(Active Yaw Control)等基本功能的组合,是一种汽车新型主动安全系统。该系统是德国博世公司(B0SCH)和梅塞德斯-奔驰(MERCEDES-BENZ)公司联合开发的汽车底盘电子控制系统。 在汽车行驶过程中,因外界干扰,比如行人、车辆或环境等突然变化,驾驶员采取一些紧急避让措施,使汽车进入不稳定行驶状态,即出现偏离预定行驶路线或翻转趋势等危险状态。装置ESP的汽车能在极短的几毫秒时间内,识别并判定出这种汽车不稳定的行驶趋势,通过智能化的电子控制方案,让汽车的驱动传动系统和制动系统产生准确响应,及时恰当地消除汽车这些不稳定的行驶趋势,使汽车保持行驶路线和预防翻滚,避免交通事故的发生。 ESP系统是汽车主动安全措施的巨大突破,它通过控制事故发生的可能性来实现安全行车,使汽车在极其恶劣的行车环境中确保行驶的稳定性和安全性。 1.汽车电子稳定系统的组成 ESP在ABS和ASR各种传感器的基础上,增加了汽车转向行驶时横摆率传感器、车身翻转角速度传感器、侧加速度传感器、制动总泵中的液压力传感器和转向盘转角传感器等。其中最重要的是车身翻转角速度传感器,这种车用传感器是航天飞机和空间飞行器上使用的旋转角速度传感器的类似产品。车身翻转角速度传感器就像一个罗盘,适时地监控汽车行驶的准确姿态,监控汽车每个可能的翻转运动角速度。其他传感器则分别监控汽车的行驶速度和各车轮的速度差,监控转向盘的转动角度和汽车的水平侧向加速度,当制动发生时则监控制动力的大小和各车轮制动力的分配情况。 ESP系统包括车距控制、防驾驶员困倦、限速识别、并线警告、停车入位、夜视仪,周围环境识别、综合稳定控制和制动助力(BAS)9项控制功能。通过综合应用9种智能主动安全技术,ESP可将驾驶员对车辆失去控制的危险性降低80%左右。 ESP智能化随车微机控制系统,通过各种传感器,随时监测车辆的行驶状态和驾驶员的驾驶意图,及时向执行机构发出各种指令,以确保汽车在制动、加速、转向等状况下的行驶稳定性。
小型客车制动力分配比分析与优化
百度文库- 让每个人平等地提升自我 本科生毕业论文(设计)题目:小型客车制动力分配比分析与优化 专业代码:机械设计制造及其自动化(080301)作者姓名:陈哲 学号: 39 单位:汽车与交通工程学院 指导教师:楚晓华 2012 年5 月20日
原创性声明 本人郑重声明:所提交的学位论文是本人在导师指导下,独立进行研究取得的成果。除文中已经注明引用的内容外,论文中不含其他人已经发表或撰写过的研究成果,也不包含为获得聊城大学或其他教育机构的学位证书而使用过的材料。对本文的研究作出重要贡献的个人和集体,均已在文中以明确方式标明。本人承担本声明的相应责任。 学位论文作者签名:日期 指导教师签名:日期
摘要 汽车的制动性直接关系到交通安全。因此,改善汽车的制动性,成为了汽车设计制造和使用部门的重要任务。由于我国车辆种类繁多,为使本篇论文更有针对性,能够从一定程度上解决实际问题,所以只研究讨论了应用较为广泛的小型客车。 本文对汽车制动系统进行了全面的、系统的理论分析,在深入研究制动系统设计要求、制动性能的评价指标以及有关制动法规的基础上,在MATLAB环境下绘制了制动力分配曲线,通过对该曲线进一步研究分析,从而优化变量、设计确定目标函数、计算约束条件。 最后,本文结合小型客车实例对汽车制动力分配进行优化与制动性能计算,并最终得出结论。 关键词:小型客车,制动系统,制动力分配曲线
Abstract The car's braking is directly related to traffic safety. Therefore, to improve the braking of the car has become the automotive design and manufacturing and use of the important task of the department. A wide range of China's vehicle to make this paper more focused, to a certain extent to solve practical problems, so the only research and discussion is widely used mini-van. Automotive Brake Systems to conduct a comprehensive, systematic theoretical analysis, in-depth study of the braking system design requirements, evaluation of braking performance and brake regulations on the basis of the brake force distribution curve drawn in the MATLAB environment , further research and analysis of the curve, in order to optimize the variable, the design objective function to calculate the constraints. Finally, this paper minibuses instance to optimize the braking force distribution and brake performance computing, and finally concluded. Keywords: minivans, braking systems, brake-force distribution curve
汽车电子稳定系统
汽车电子稳定系统(ESP) 汽车电子稳定系统或动态偏航稳定控制系统(Electronic Stability Program,ESP)是防抱死制动系统ABS、驱动防滑控制系统ASR、电子制动力分配系统EBD、牵引力控制系统TCS和主动车身横摆控制系统AYC(Active Yaw Control)等基本功能的组合,是一种汽车新型主动安全系统。该系统是德国博世公司(B0SCH)和梅塞德斯-奔驰(MERCEDES-BENZ)公司联合开发的汽车底盘电子控制系统。 在汽车行驶过程中,因外界干扰,比如行人、车辆或环境等突然变化,驾驶员采取一些紧急避让措施,使汽车进入不稳定行驶状态,即出现偏离预定行驶路线或翻转趋势等危险状态。装置ESP的汽车能在极短的几毫秒时间内,识别并判定出这种汽车不稳定的行驶趋势,通过智能化的电子控制方案,让汽车的驱动传动系统和制动系统产生准确响应,及时恰当地消除汽车这些不稳定的行驶趋势,使汽车保持行驶路线和预防翻滚,避免交通事故的发生。 ESP系统是汽车主动安全措施的巨大突破,它通过控制事故发生的可能性来实现安全行车,使汽车在极其恶劣的行车环境中确保行驶的稳定性和安全性。 1.汽车电子稳定系统的组成 ESP在ABS和ASR各种传感器的基础上,增加了汽车转向行驶时横摆率传感器、车身翻转角速度传感器、侧加速度传感器、制动总泵中的液压力传感器和转向盘转角传感器等。其中最重要的是车身翻转角速度传感器,这种车用传感器是航天飞机和空间飞行器上使用的旋转角速度传感器的类似产品。车身翻转角速度传感器就像一个罗盘,适时地监控汽车行驶的准确姿态,监控汽车每个可能的翻转运动角速度。其他传感器则分别监控汽车的行驶速度和各车轮的速度差,监控转向盘的转动角度和汽车的水平侧向加速度,当制动发生时则监控制动力的大小和各车轮制动力的分配情况。 ESP系统包括车距控制、防驾驶员困倦、限速识别、并线警告、停车入位、夜视仪,周围环境识别、综合稳定控制和制动助力(BAS)9项控制功能。通过综合应用9种智能主动安全技术,ESP可将驾驶员对车辆失去控制的危险性降低80%左右。 ESP智能化随车微机控制系统,通过各种传感器,随时监测车辆的行驶状态和驾驶员的驾驶意图,及时向执行机构发出各种指令,以确保汽车在制动、加速、转向等状况下的行驶稳定性。 图1是汽车电子稳定系统ESP的各种传感器及电子稳定系统ECU在轿车上的安装,其ECU 中配置了两台56kB内存的微机。ESP系统利用这两台微机和各种传感器信号不间断地监控车内电子模块、系统的工作状态和汽车的行驶姿势,比如,速度传感器每相隔20ms就会自检一次。ESP系统还通过车内电子模块之间的信号交流通信网络,充分利用防抱死制动系统ABS、制动助力系统BAS和驱动防滑控制系统ASR等的先进功能。紧急情况下,如紧张的驾驶员对制动力施加不够,制动助力系统BAS将自动增大制动力。在ESP系统出现故障不能正常工作时,ABS和ASR系统能照样工作,以保证汽车正常行驶和制动。
汽车知识讲座-汽车制动时受力分析
汽车知识讲座-汽车制动时受力分析 1.摩擦阻力的因素 汽车在制动过程中,有两个地方会产生摩擦阻力。一个是车轮制动器产生的摩擦阻力,使车轮转速减慢;另一个是车轮与地面产生摩擦阻力使汽车减速。前者称制动器制动力,后者称地面制动力,也就是我们车在检测站检测的制动力。 如果制动器产生的摩擦力偶大于轮胎与路面之间的最大摩擦力偶时,车轮即完全停止滚动,也就是车轮被抱死。 在车轮未抱死前,地面制动力始终等于制动器制动力,此时制动器制摩擦力消耗一部份动能(发热),地面制动力消耗一部份动能。 在车轮抱死后,地面制动力等于地面附着力,它不再随制动器制动力的增加而增加,制动器制不再消耗动能(W=FS,∵S=0,∴W=0),只有轮胎与地面摩擦消耗动能。由于车轮抱死后,纵向附着系数(摩擦力)下降,制动器制也不消耗动能,侧向附着系数趋于0,所以刹车距离也就变长,易产生则滑。 2.前后轴载荷重心变动的因素 车辆在静止时,其前后轴的垂直载荷之比仅决定于汽车重心的纵向位置。但在车辆行驶中制动时,由于作用在重心上的向前的惯性力使汽车俯冲前倾,因而前后轴的垂直载荷比值变大,即前轴载荷加大,而后轴载荷减少;而且制动力越强,惯性力越大,前后轴垂直载荷的比值也越大。即刹车时前轴荷随加速度变大而增大,后轴荷减少。 80年后生产的国产及进口车轿车,前后轴制动力分配按欧共体的ECE R13标准制定,即按“前后轴附着糸数利用曲线”分配比例,不允许有车轮抱死现象,前轴所占总制动力通常为80%,上限为85%。 各种轿车都是按自身的悬挂糸统的动态重心分配特性去设计前后轴制动力分配,原车的前后轴制动力分配是经过各种实验优化定案,提供良好的制动平衡。 根椐北京理工大学做的路试,国产及进口轿车前轴刹车力在800kg-1100kg以上,后轴最低173kg,最高290kg(满载车重1684kg),路试刹车减速度、距离都符合要求。实试正实,后轮刹车即使一轮失效,30km/h刹车距离变化很小,不跑偏。国内现有的检测站的测试台是无法测试真正动态刹车力的。 急刹车时,前轮先抱死,汽车不能变方向,后轮先抱死则产生侧滑。后轮比前轮先抱死要危险得多!因此,我不认同随便改动“比例阀”去适应年审验车。 轿车前轴的制动力决定了制动距离效能,有关刹车距离长故障重点应放在前轴。 3.车轮抱死的影响因素 车轮抱死是制动侧滑的根本原因,制动强度太大也可导致汽车制动侧滑。路面状况不同,车轮与地面附着特性不同,在制动时,如果制动强度太大,可能导致车轮滑移率超过制动稳定的范围,从而导致制动方向失稳。因此,驾驶员应熟悉制动器和路面特性,把制动强度控制在制动方向稳定范围内,并发挥较大的制动效能。 根据车轮与地面的附着特性,当车轮抱死以后,地面横向附着系数降为零,这时车轮不能承受侧向外力作用。当前轮抱死并试图转向时,尽管操纵转向盘使前轮偏转,但由于地面不能对车轮产生侧向作用力,前轮将沿汽车纵向轴线
ESP电子车身稳定装置与EBD电子制动力分配系统有什么区别
EBD和ESP都是ABS下的延伸电子系统 EBD的英文全称是Electric Brake force Distribution,中文翻译为电子制动力分布,EBD系统是当重踩制动在ABS作动之前,可平衡每一个轮的有效地面抓地力,主要是用来改善制动力的平衡并缩短制动距离。EBD可依据车辆的重量和路面条件,当制动时此系统会自动以前轮为基准去比较后轮轮胎的滑动率,如发觉差异且此差异程度是必须被调整时, 则此时制动油压系统将会调整传至后轮的油压以得到更平衡且更接近理想化制动力的分布。 EBD能够根据由于汽车制动时产生轴荷转移的不同,而自动调节前、后轴的制动力分配比例,提高制动效能,并配合ABS提高制动稳定性。汽车在制动时,四只轮胎附着的地面条件往往不一样。比如,有时左前轮和右后轮附着在干燥的水泥地面上,而右前轮和左后轮却附着在水中或泥水中,这种情况会导致在汽车制动时四只轮子与地面的摩擦力不一样,制动时容易造成打滑、倾斜和车辆侧翻事故。EBD用高速计算机在汽车制动的瞬间,分别对四只轮胎附着的不同地面进行感应、计算,得出不同的摩擦力数值,使四只轮胎的制动装置根据不同的情况用不同的方式和力量制动,并在运动中不断高速调整,从而保证车辆的平稳、安全。 答案补充 ESP的英文全称是Electronic Stability Program,中文翻译为电子稳定程序,ESP系统由控制单元及转向传感器(监测方向盘的转向角度)、车轮传感器(监测各个车轮的转动速度)、侧滑传感器(监测车体绕垂直轴线转动的状态)、横向加速度传感器(监测汽车转弯时的离心力)等组成。控制单元通过这些传感器的信号对车辆的运行状态进行判断,进而发出控制指令。有ESP与只有ABS及ASR的汽车,它们之间的差别在于ABS及ASR只能被动地作出反应,而ESP则能够探测和分析车况并纠正驾驶的错误,防患于未然。ESP对过度转向或不足转向特别敏感,例如汽车在路滑时左拐过度转向(转弯太急)时会产生向右侧甩尾,传感器感觉到滑动就会迅速制动右前轮使其恢复附着力,产生一种相反的转矩而使汽车保持在原来的车道上。这套系统是由博世公司研发,最初只应用在高档车上,现在也在逐渐向中高档汽车上延伸。ESP系统能够给乘客提供更高的安全保障,无论是在高速行使时的紧急避障,还是在湿滑路面的急打方向,ESP系统都能提供快速准确的方向响应,保证车身行驶稳定。 答案补充 当然,无论EBS和ESP的作用效果有多好,终归是有它的物理极限的,不在万不得已的情况下,还是谨慎驾驶最最安全。
汽车电子稳定程序系统
浅谈汽车电子稳定程序 前言 随着汽车行驶速度的提高,道路行车密度的增大,汽车行驶安全性已经受到了高度关注。汽车的行驶安全性能要求不断提高,汽车安全系统已经成为汽车研究发展的重要部分。 汽车安全性包括主动安全性和被动安全性两大类。汽车主动 安全是指事故发生前的安全,即实现事故预防和事故回避,防止 事故发生。主动安全性是指通过事先预防,避免或减少事故发生 的能力。被动安全性是指汽车在发生意外事故时对乘员进行有效 保护的能力。汽车的主动安全性因其防患于未然,所以越来越受 到汽车厂商和消费者的重视,越来越多的先进技术也被应用到汽 车主动安全装置上。主动安全性的好坏决定了汽车产生事故发生概率的多少,而被动安全性的好坏主要决定了事故后车内成员的受伤严重程度。 目前广泛运用的汽车主动安全性系统主要有防抱死制动系统(ABS)、驱动防滑系统〔ASR〕、牵引力控制系统 (TCS)、汽车电子稳定程序系统(ESP),汽车电子制动力分配系统(EBD), 紧急刹车辅助系统 (EBA)、汽车自适应巡航速度控制系统(ACC)等,保证汽车在危险状况下行驶的安全性。上述这些系统具有智能化的控制作用,根据车辆的行驶状况,自动地完成对汽车制动性能、转向辅助等的控制,无需人的主动性操作,可见汽车安全系统已经向智能型方向发展。
摘要 本文探讨了ESP系统的原理、发展和现状。简要讨论汽车 ESP 系统的结构及关键技术。介绍新奥迪 A4轿车 ESP系统的组成、电控系统、液压单元及工作过程。 关键词:电子稳定程序,主动安全性,操纵稳定性,模糊控制传感器液压控制单元电子控制单元 ESP系统实际是一种牵引力控制系统,与其他牵引力控制系统比较,ESP不但控制驱动轮,而且可控制从动轮。如后轮驱动汽车常出现的转向过多情况,此时后轮失控而甩尾,ESP便会刹慢外侧的前轮来稳定车子;在转向过少时,为了校正循迹方向,ESP则会刹慢内后轮,从而校正行驶方向。 ESP系统是汽车上一个重要的系统,通常是支持ABS及ASR 的功能。它通过对从各传感器传来的车辆行驶状态信息进行分析,然后向ABS、ASR发出纠偏指令,来帮助车辆维持动态平衡。ESP可以使车辆在各种状况下保持最佳的稳定性,在转向过度或转向不足的情形下效果更加明显。ESP一般需要安装转向传感器、车轮传感器、侧滑传感器、横向加速度传感器等。 ESP系统包含ABS(防抱死刹车系统)及ASR(驱动防滑转系统),是这两种系统功能上的延伸。因此,ESP称得上是当前汽车
EBD-EBL电子制动力分配及限制技术解析 electronic brake force distribution
EBD-EBL电子制动力分配及限制技术解析electronic brake force distribution The theoretical basis and principle of EBD: during brake, rear axle sideslip is the main factor causing the vehicle not stable, by lots of experiments, the rear axle when braking if than the front axle is locked first sliping, may occur for the plant to prevent rear axle sideslip, locking the rear wheel and a dangerous side slip, the actual front and rear brake force distribution curve of automobile brake system (knife line) should always be in the ideal braking force distribution line (I curve) below, for plants to reduce the wheel to lose steering ability opportunity and improve the braking efficiency, knife line should be more close to the I curve is better, the EBD function can be achieved today, has a fixed proportion of the front and rear axle braking force the car has a bigger superiority. The EBD function is the balance function of slip ratio, by modifying the program of ECU in ABS system to achieve, ABS system does not need to install additional components, the ABS system is the wheel speed sensor is calculated based on the rear axle of slip rate and reducing vehicle speed exceeds the set range in the braking process, the EBD start function, the output pressure of the rear axle will change with the different loads,
基于MATLAB的汽车制动系统设计与分析软件开发.
基于MAT LAB 的汽车制动系统 3 设计与分析软件开发 孙益民(上汽汽车工程研究院 【摘要】根据整车制动系统开发需要, 利用MAT LAB 平台开发了汽车制动系统的设计和性能仿真软件。 该软件用户界面和模块化设计方法可有效缩短开发时间, 提高设计效率。并以上汽赛宝车为例, 对该软件的可行性进行了验证。 【主题词】制动系汽车设计 统分成两个小闭环系统, 使设计人员更加容易把 1引言 制动性能是衡量汽车主动安全性的主要指标。如何在较短的开发周期内设计性能良好的制动系统一直是各汽车公司争相解决的课题。 本文拟根据公司产品开发工作需要, 利用现有MA T LAB 软件平台, 建立一套面向设计工程师, 易于调试的制动开发系统, 实现良好的人机互动, 以提高设计效率、缩短产品开发周期。 握各参数对整体性能的影响, 使调试更具针对性。 其具体实施过程如图1所示。 3软件开发
与图1所示的制动系统方案设计流程对应, 软件开发也按照整车参数输入、预演及主要参数确定, 其他参数确定和生成方案报告4个步骤实现。3. 1车辆参数输入 根据整车产品的定位、配置及总布置方案得出空载和满载两种条件下的整车质量、前后轴荷分配、质心高度, 轮胎规格及额定最高车速。以便获取理想的前后轴制动力分配及应急制动所需面临的极限工况。 3. 2预演及主要参数确定 在获取车辆参数后, 设计人员需根据整车参数进行制动系的设计, 软件利用MAT LAB 的G U I 工具箱建立如图2所示调试界面。左侧为各主要参数, 右侧为4组制动效能仿真曲线, 从曲线可以查看给定主要参数下的制动力分配、同步附着系数、管路压力分配、路面附着系数利用率随路况的变化曲线, 及利用附着系数与国标和法规的符合现制动器选型、性能尺寸调节, 查看液压比例阀、感载比例阀、射线阀等多种调压工况的制动效能, 并通过观察了 2汽车制动系统方案设计流程的优化 从整车开发角度, 制动系统的开发流程主要包括系统方案设计、产品开发和试验验证三大环节。制动系统的方案设计主要包含结构选型、参数选择、性能仿真与评估, 方案确定4个环节。以前, 制动系统设计软件都是在完成整个流程后, 根据仿真结果对初始设计参数修正。因此, 设计人员往往要反复多次方可获得良好的设计效果, 而且, 在调试过程中, 一些参数在特定情况下的相互影响不易在调试中发现, 调试的尺度很难把握。 本文将整车设计流程划分为两个阶段:主要参数的预演和确定、其他参数的预演和参数确定。即根据模块化设计思想, 将原来一个闭环设计系 收稿日期:2004-12-27 3本文为上海市汽车工程学会2004年(第11届学术年会优秀论文。
驻车制动设计计算
219 式中?——该车所能遇到的最大附着系数; q——制动强度 e r ——车轮有效半径。 一个车轮制动器应有的最大制动力矩为按上列公式计算结果的半值。 奥龙、德御系列车采用的是斯太尔前轴、后桥,制动器采用的是斯太尔领从蹄鼓式制动器,如图13.5所示,制动器的规格为前φ420×160/后φ420×185,制动器结构参数及制动力矩见表13.1、表13.2,由于奥龙、德御车制动系统中没有安装气压感载调节阀,所以整车制动力不可调节,对同一系列车,整车制动力分配系数为定值,所以,实际制动力分配曲线与理想的制动力分配曲线相差较大,制动效率较低,前轮可能因抱死而丧失转向能力,后轮也可能抱死使汽车有发生后轴侧滑的危险。 图13.5 领从蹄鼓式制动器结构示意图 因此,对奥龙、德御系列车来说,可以通过调整轴荷分配来调整重心位置,使车辆满载情况下的同步附着系数接近可能遇到的路面附着系数,才能获得稳定的制动工况。 表13.1 斯太尔前、后制动器结构参数 表13.2 斯太尔前、后制动器在各种制动气压下的制动力矩 4.驻车计算 图13.6为汽车在上坡路上停驻时的受力情况,由此可得出汽车上坡停驻时的后轴车轮的附着力为: 结构参数 STEYR (前) STEYR (后) L(mm) 155mm 155mm a(mm) 160mm 160mm M(mm) 38mm 38mm 摩擦片包角0β 95° 110° 摩擦片起始角 29°8′ 21°39′ 制动臂长l(mm) 122 145 摩擦片宽b(mm) 160 185 制动鼓半径(mm) 210 210 ()a MP P 0 0.5 0.6 0.7 0.8 m N M u ??/)(1前 10811 12974 15135 17299 m N M u ??/)(2后 13573 16287 19002 21717
汽车电子稳定系统或动态偏航稳定控制系统
汽车电子稳定系统或动态偏航稳定控制系统(Electronic Stability Program,ESP)是 防抱死制动系统ABS、驱动防滑控制系统ASR、电子制动力分配系统EBD、牵引力控制系统TCS和主动车身横摆控制系统AYC(Active Yaw Control)等基本功能的组合,是一种汽车新型主动安全系统。该系统是德国博世公司(B0SCH)和梅塞德斯-奔驰(MERCEDES-BENZ)公司联合开发的汽车底盘电子控制系统。 在汽车行驶过程中,因外界干扰,比如行人、车辆或环境等突然变化,驾驶员采取一些紧急避让措施,使汽车进入不稳定行驶状态,即出现偏离预定行驶路线或翻转趋势等危险状态。装置ESP的汽车能在极短的几毫秒时间内,识别并判定出这种汽车不稳定的行驶趋势,通过智能化的电子控制方案,让汽车的驱动传动系统和制动系统产生准确响应,及时恰当地消除汽车这些不稳定的行驶趋势,使汽车保持行驶路线和预防翻滚,避免交通事故的发生。 ESP系统是汽车主动安全措施的巨大突破,它通过控制事故发生的可能性来实现安全行车,使汽车在极其恶劣的行车环境中确保行驶的稳定性和安全性。 1.汽车电子稳定系统的组成 ESP在ABS和ASR各种传感器的基础上,增加了汽车转向行驶时横摆率传感器、车身翻转角速度传感器、侧加速度传感器、制动总泵中的液压力传感器和转向盘转角传感器等。其中最重要的是车身翻转角速度传感器,这种车用传感器是航天飞机和空间飞行器上使用的旋转角速度传感器的类似产品。车身翻转角速度传感器就像一个罗盘,适时地监控汽车行驶的准确姿态,监控汽车每个可能的翻转运动角速度。其他传感器则分别监控汽车的行驶速度和各车轮的速度差,监控转向盘的转动角度和汽车的水平侧向加速度,当制动发生时则监控制动力的大小和各车轮制动力的分配情况。 ESP系统包括车距控制、防驾驶员困倦、限速识别、并线警告、停车入位、夜视仪,周围环境识别、综合稳定控制和制动助力(BAS)9项控制功能。通过综合应用9种智能主动安全技术,ESP可将驾驶员对车辆失去控制的危险性降低80%左右。 ESP智能化随车微机控制系统,通过各种传感器,随时监测车辆的行驶状态和驾驶员的驾驶意图,及时向执行机构发出各种指令,以确保汽车在制动、加速、转向等状况下的行驶 稳定性。 图1是汽车电子稳定系统ESP的各种传感器及电子稳定系统ECU在轿车上的安装,其ECU中配置了两台56kB内存的微机。ESP系统利用这两台微机和各种传感器信号不间断地监控车内电子模块、系统的工作状态和汽车的行驶姿势,比如,速度传感器每相隔20ms就会自检一次。ESP系统还通过车内电子模块之间的信号交流通信网络,充分利用防抱死制动系统ABS、制动助力系统BAS和驱动防滑控制系统ASR等的先进功能。紧急情况下,如紧张的驾驶员对制动力施加不够,制动助力系统BAS将自动增大制动力。在ESP系统出现故障不能正常工作时,ABS和ASR系统能照样工作,以保证汽车正常行驶和制动。
电动汽车制动力的分配分析及优化
电动汽车制动力的分配分析及优化 薛咏梅,郝彩红,鲁凤杰 (长安大学汽车学院,陕西西安710064) 摘要:新能源汽车中,特别是电动汽车,因其节能环保的优势,是社会和国家相关部门提倡的重点,在私人轿车中的比例也逐步增大。因此,当今对电动车的研究也更加深入,电动汽车的制动力分配作为电动汽车安全性的主要内容,也是本文重点研究的方向。本文主要介绍电动汽车制动力分配特点,兼顾制动力分配的制动系统能量回收以及制动力分配的相关理论曲线。并引入实际车型,通过其实际制动力分配曲线与理想制动力分配曲线的对比来验证其制动力分配的合理性,根据对比结论分析制动力分配的特点。并对制动力分配的优化方案进行介绍与展望。通过整个体系的阐述,强调制动力分配的重要性以及对电动汽车制动安全性、稳定性的意义,也是电动汽车今后发展的重要方向。为我们今后对电动汽车的研究奠定了一定的基础。 关键词:电动汽车制动;能量回收;制动力分配;分配优化 The braking force of electric car distribution optimization analysis XUE Yong-Mei,HA0 Cai-Hong,LU Feng-Jie School of automobile,Chang’an University,Xi’an,710064,China Abstract: this article expounds the electric car braking force distribution optimization , chapter five written in full. Was the center of the braking energy recovery and the optimization of braking force distribution of two parts, the two parts is also a corresponding content. The first chapter focuses on the overview of the electric car braking and research background; The second chapter mainly analyzes the braking energy recovery, recycling development present situation and the main methods of recycling and how to maximize the recovery of energy; The third chapter expounds the theory of braking force distribution, the theoretical basis of this is the fourth chapter; The fourth chapter mainly studies the optimal allocation of braking force, this is the ultimate goal of our research and results; The last chapter of this article has carried on the summary and prospect of the system. In this paper, based on the research of the electric car braking, based on the theory of braking force distribution optimization analysis to its, this paper expounds the current new technology of the car care point and deficiency, and on the analysis of the study and prospect. Key words: the electric car braking energy recovery, braking force distribution, distribution optimization 1绪论 新世纪以来,社会发展趋势使得电动汽车成为新时期轿车的主力之一。而且,当今能源和环境问题更加严重,电动汽车因节能环保很占优势。而将电动汽车的制动能量回收与制动力的分配相结合的优化设计,正是我们研究的重点。本文通过对制动系统能量回收和制动力的优化分配策略两大体系内容的研究与分析,对电动汽车进行系统研究。进而实现电动汽车的节能环保。本文的主要写作思路是:1.制动系统的能量回收。2.制动力优化分配策略。制动系统构型,制动强度二次再分数学模型,优化过程及实例分析。 2兼顾制动力分配的制动能量回收 同时,对电动汽车来说,制动力在优化分配的同时。还要考虑另一个重要的理论,就是电动汽车制动能量的回收。因其靠电机驱动,没有内燃机提供动力,因此电动汽车需要回收相应的制动能量以提高汽车行驶的动力性,而电动汽车能量的回收又与制动力的优化互不兼容。因此,我们需要对两者做详细的分析。主要是制动力的分配原理,因为电动汽车没有内燃机,故其动力性也是一个需要考虑在内的问题,我们不能只考虑制动力的优化分配,也要兼顾制动能量的回收。