基于MSP430的低频信号采集系统

总第172期
2008年第10期
舰船电子工程
Ship Electronic Engineering Vol.28No.10
177
基于MSP430的低频信号采集系统
3
李 科1)
刘大钢2)
钟多就1
)
(海军湛江航保修理厂1) 湛江 524002)(海军91367部队2) 海口 570311)
摘 要 为了采集水中低频信号,设计了基于MSP430F1611和K9F2G08U0M 的数据采集与存储系统,该系统解决了目前海上测量信号时存在危险性高和难度大的问题,整个系统具有低噪声、低功耗、智能自动记录和大容量存储等特点。海上试验结果表明该系统性能可靠,具有重要的军事运用前景。
关键词 MSP430F1611;数据采集;闪速存储器中图分类号 TP274
Dat a Acquisition System Based on MS P 430for EL F Signal
L i Ke 1)
L iu Dagang 2)
Zhong Duojiu 1
)
(The Factory of Repairing for Navigation in Zhanjiang 1),Zhanjiang 524002)
(NO.91367Troops of PL A 2),Haikou 570311)
Abs t rac t Design a data acquisition and memory system for underwater extreme low f requency signal based on
MSP430F1611and Flash Memory ,key techniques for low noise ,low power ,auto 2saving and mass storage can be solved for underwater test.The experimental results by sea trials show that this system is credible and it can be used in the military af 2
fairs.
Ke y w ords msp430mcu ,data acquisition ,flash memory Class Nu m ber TP274
1 引言
海洋环境中包含丰富的低频信号成分,对这些数据的测量具有重要的军事意义[1]。传统的海上测量方法危险性高、难度大,本文采用MSP430F1611微功耗单片机结合24位A/D 转换
芯片AD7799及Flash 存储器K9F2G08U0M 设计的采集系统具有精度高、功耗低、存储容量大等特点,海上实测试验表明该系统性能可靠。
2 系统组成及工作原理
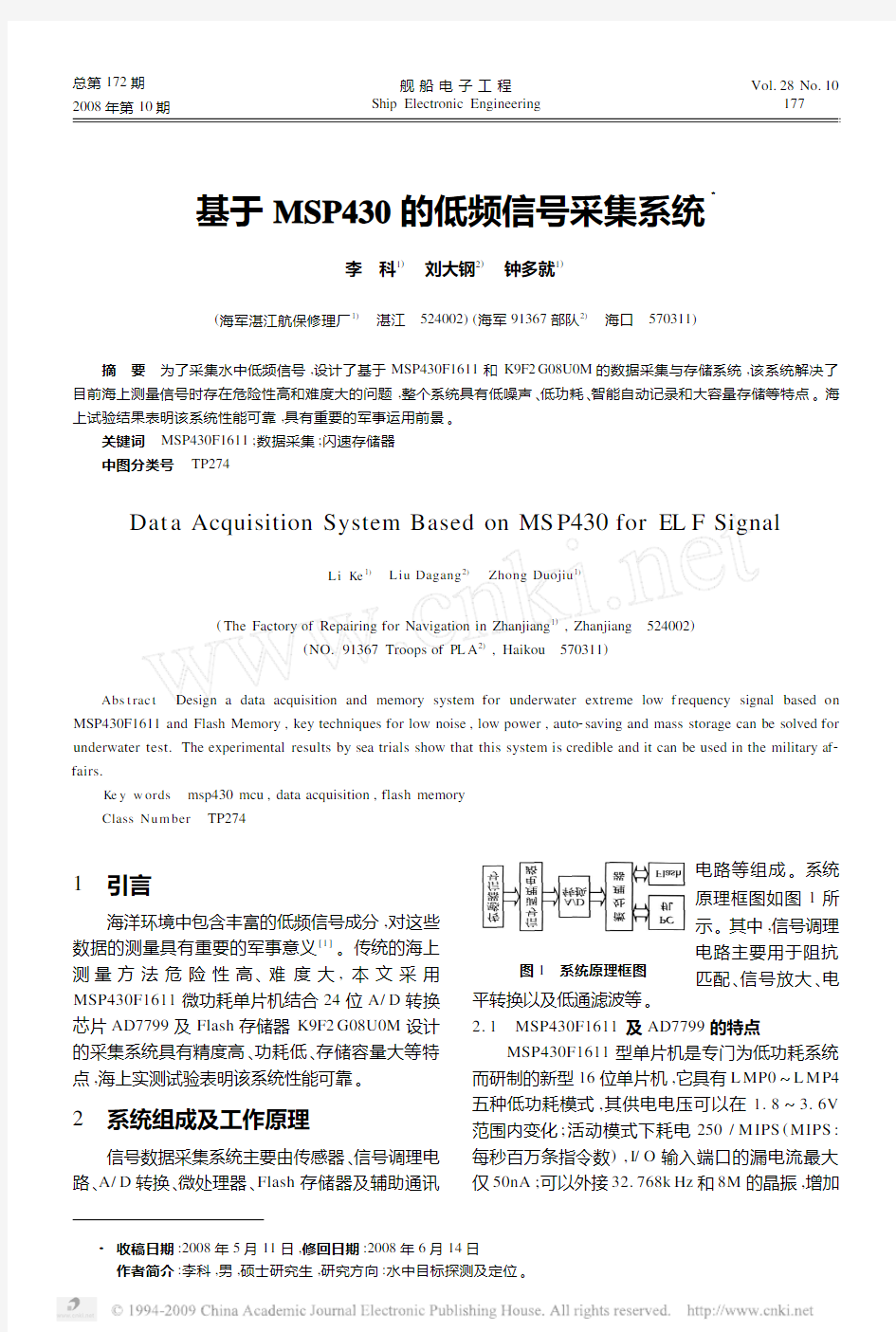
信号数据采集系统主要由传感器、信号调理电路、A/D 转换、微处理器、Flash 存储器及辅助通讯
图1 系统原理框图
电路等组成。系统原理框图如图1所示。其中,信号调理电路主要用于阻抗匹配、信号放大、电
平转换以及低通滤波等。
2.1 MSP430F1611及AD7799的特点
MSP430F1611型单片机是专门为低功耗系统
而研制的新型16位单片机,它具有L MP0~L M P4五种低功耗模式,其供电电压可以在1.8~3.6V
范围内变化;活动模式下耗电250/M IPS (MIPS :每秒百万条指令数),I/O 输入端口的漏电流最大仅50nA ;可以外接32.768k Hz 和8M 的晶振,增加
3
收稿日期:2008年5月11日,修回日期:2008年6月14日
作者简介:李科,男,硕士研究生,研究方向:水中目标探测及定位。
178 李 科等:基于MSP430的低频信号采集系统总第172期
了功耗和速度选择的灵活性;内置多种外围设备,如三个定时器、看门狗、比较器、12位A/D 、Flash 存储器、串口通信模块、硬件乘法器等[2],大大简化了硬件电路设计
。
图2 AD7799与MSP430
F1611的接口电路
AD7799是ADI
公司推出的24bit ,2.75-5.25V 单电源
工作,典型工作电流380,电压噪声有效
值最低仅27nV 。AD7799带有三路可
选择的差分输入缓冲器(可以接缓冲器或不接缓冲器),输出数据速率可以由软件设置,允许速率为4.17-470Hz 。它在16.6Hz 默认转换速率条件下,能提供50Hz 和60Hz 的
同步抑制,适合用于低频测量的低功耗模拟前端。AD7799与MSP430F1611的接口电路如图2所示。
AD7799通过SPI 串口与MSP430F1611进行
连接,其接口电路见图2,这里使用的是4线方式,即片选信号CS 、串行同步时钟SCL K 、数据输入线DIN 和数据输出管脚与MSP430F1611进行连接。DOU T/RD Y 的第二个功能是AD 转换结束后通知
信号,当没有转换结束时该端口输入为高电平,一旦转换结束该端口输入为低电平,触发中断,进入中断服务程序,通过对430单片机的IO 口编程模仿AD7799的读写时序,读写AD7799中各个寄存器的数据,读写过程CS 应保持为低电平[3]。2.2 K9F2G08U0M 及通信模块
为使数据采集系统能记录较长时间的被测物理量状态,数据存储器应具有较大的容量和较低的功耗。同时为与现场环境下的采样频率相匹配,对数据存储器的读写速度也有相应要求。本系统采用SAMSUN G 公司生产的大容量、高可靠性及非易失性闪速存贮器K9F2G08UOM 。该器件供电电压2.7- 3.6V ,采用CMOS 浮置门技术和与非存储结构,存储容量为256M 38位,可以在0.2ms 内完成2112字节的页编程[4]。PC 机与MSP430F1611内部提供的串口通信模块,配合电
平转换芯片MAX3223可以很容易实现串口通信。主要完成仪器控制、参数预置、数据回收等功能[5]。2.3 系统工作原理
通过PC 机控制本系统是工作于数据采集模式还是数据回收模式。数据采集模式下,首先按块擦除K9F2G08U0M ,MSP430工作于L M P3模式,
定时器开始计时,待定时时间到,使能AD7799,AD 转换后的数据先放到MSP430F1611存储器中,待达到2112个字节后将其按页编程写入K 9F2G 08U0M 中。数据采集结束后,MSP430F1611将K 9F2G 08U0M 中的数据读出,并利用串口发送至PC 机。
3 系统软件设计
本系统软件设计包括两个部分,包括MSP430F1611系统软件和控制及数据回收软件。MSP430的内核CPU 结构是按照精简指令集和高
透明指令的宗旨来设计的,因此下位机开发采用专门用于MSP430系列单片机而设计集成开发环境IA R Embedded Workbench ,编程采用C 语言。上
位机软件设计采用Visual C +
+设计,编写的串口控制软件稳定、可移植性好。图3给出了下位机的软件设计框图。实际使用表明,软件具有运行稳定,数据传送速度快(115200bp s )的特点。
图3 软件设计框图
4 海上试验及数据
为检验本系统的性能,以水压信号采集为例,水压传感器使用压阻式绝压传感器,供电电压8-32V ,最大测量水深70m ,满量程输出5V ,AD7799
转换频率16.6Hz ,此时峰-峰分辨率19位,系统最小测量精度1.33Pa 。本系统采用碱性干电池供电,共使用2组电池,分别为15V 和6V ,15V 电源给传感器供电,6V 经电压转换成3V 后给
2008年第10期舰船电子工程179
AD7799、MSP430F1611及K9F2G08U0M 供电。
经功耗测试后,系统可自动运行40d 左右,完全满足测量时间要求。测试地点为渤海某海域,测量水深约为20m ,试验测量时,阵风11级,海况5-6级。实测海浪水压场信号见图4。从图中可以看
出,该系统在巨大静压(约207kPa )条件下,能够有效的分辨海浪水压场数据,测量精度较高
。
图4 海浪水压场信号
5 结语
本文采用MSP430F1611微功耗单片机结24位A/D 转换芯片AD7799和Flash 存储器K 9F2G 08U0M
设计的采集系统具有精度高、功耗低、存储容量大等特点,解决了水下测量系统的低功耗和大容量存储两大难题,海上试验表明该系统性能可靠
,具有广泛的军事应用前景。
参考文献
[1]林春生,龚沈光.舰船物理场[M ].北京:兵器工业出版
社,2007:119~156
[2]沈建华,杨艳琴,翟晓曙.MSP430系列16位超低功耗
单片机原理与应用[M ].北京:清华大学出版社,2004:1~8
[3]靳斌,李司宇,曾统一.基于AD7799的色谱工作站数据
采集器研制[J ].微计算机信息,2007,23(10-2):279~
281
[4]SAMSUN G Corp.Datasheet of 256M 38Bit NAND
Flash Memory K9F2G 08UOM [DB/OL ].http ://
https://www.360docs.net/doc/1514001378.html,\
[5]冯峻域,戴青云,植俊文.基于多线程串口通信的生产
数据实时采集[J ].微计算机信息,2006,22(4-1):
150~151
(上接第160页)
1Mbp s 的通信速率,采用S J A -1000作为CAN 控
制器,82C250作为CAN 总线收发器。模块提供了两个CAN 通讯端口。
图2 系统的总体结构图
4.2 系统的总体结构
针对传统的以太网技术实时性差,难以满足控制系统的实时性要求,是非确定性网络的问题,改进方案采用了近几年来迅速发展的交换式以太网技术。该技术给解决以太网的非确定性问题带来了新的契机,使以太网在工业控制领域中的应用成为可能。
交换式以太网利用交换机将原有的一个冲突域拆分成多个,使不同设备之间产生冲突的可能性降低,提高了网络的容量,减轻了冲突给网络带来的影响,有效地提高了系统的实时性和确定性。因
此,改进方案通过采用交换式以太网技术,不仅能够提高系统的实时性能,而且能够提高网络平台的开放性和可扩展性,便于现场总线网络与信息网络的集成。
5 结语
重点介绍了iCAN 系列功能模块的原理及应用,并介绍了iCAN 系统和iCAN 协议的概况,iCAN 协议授权支持行业客户免费使用,开发基于iCAN 协议的产品不需要支付额外的协议费用,这
使其在与国外许多现场总线CAN -bus 应用层协
议的竞争中占据有利位置。随着CAN -bus 总线在国内行业应用日渐广泛,以及工业控制领域中DCS 和FCS 的互相融合,iCAN 系统一定会成为分
布式数据采集网络的一种有效通信方式,具有良好的应用前景。
参考文献
[1]王杰.现场总线技术的现状与发展[J ].电气传动自动
化,2005,27(3):15~19
[2]周立功.iCAN 现场总线原理与应用[M ].北京:北京航
天大学出版社.2007,4:1~2
[3]胡安平.PC104在工程中的应用[J ].电子产品世界,
2002,(8):60
嵌入式人体步态自动识别系统
嵌入式人体步态自动识别系统 早期的医学研究指出: 人的步态中有24种不同的成分,如果把这24种成分都考虑到,则步态是为个体所特有的。有关研究人员近些年来通过对人的步态分析,已经得出了在步态视频序列中含有人的身份信息,因此进行步态识别也是一种非常重要的生物识别技术。步态识别是近年来越多的研究者所关注的一种较新的生物认证技术,它是通过人的走路方式来识别人的身份。基于步态的身份认证识别技术相对于其它生物识别技术有如下优点: 远距离识别、识别对象的被动性、不易被隐藏、不易被察觉、应用领域广阔等,步态识别技术最近已经备受关注,并且已经取得了一些初步成果。如美国国防部研究项目署(DARPA)2000年的重大项目一HID(human identification at adistance)计划,其目的就是开发多模态视觉监控技术以实现远距离情况下人物的检测、分类和识别。中科院自动化研究所模式识别国家重点实验室近年也开始了对步态识别的研究,而且创建了NLPR步态数据库。虽然步态识别是一个新兴的研究领域,但是近年来已经涌现出了一些尝试性的工作。最早提出步态识别算法的是Niyogi与Adelson等人。Cunado和Nixon等人提出了一种基于模型的特征提取分析方法,VHT(velocity hough transform)。Kale等人将行人的外轮廓宽度作为图像特征,提出了一种依赖于角度的识别方法。而Johnson和Bobick 提出了一种不依赖于角度的步态识别算法。Sarkar等人提出了步态识别的基线算法。Lee等人提出了一种基于步态外形的表达方法,其具体做法是先将人体的各个部分映射到几个椭圆组成的模型上,然后用其质心位置和离心率作为步态特征来进行步态识别。Wang等人提出了一种简单有效的、基于人体运动轮廓的识别算法。值得注意的是,步态识别的研究尚处于初级阶段,表现在: a.实验都是在特定的环境下进行的,比如相对简单固定的背景,人相对于摄像机侧面行走,摄像机固定不动等;b.算法的评估都是在小样本数据库上进行的,而且数据库也不规范。迄今为止,针对步态识别所进行的研究几乎全部是基于PC机的,而在许多情况下,却需要非PC机环境,所以研究基于嵌入式平台的步态识别系统,具有一定的工程意义。本系统的功能是对采集到的步态视频序列进行图像处理,得到视频序列中的人体步态信息,再由步态算法根据
基于MATLAB 的声音信号采集系统(论文)
基于MATLAB 的声音信号采集系统 野龙平 (陕西师范大学电子信息科学与技术,陕西) 摘要: 声音是各种信号传递与交流最直接的体现,因此对声音信号的研究有十分重要的意义。本文主要针对Matlab指令系统对声音信号的采集,作者利用Matlab 提供的数据采集工具箱, 介绍了倆种采集方法,简单分析并比较其优缺点。基于matlab的数据采集系统, 具有实现简单、性价比和灵活度高的优点。 关键词: Matlab; 数据采集 0 引言 随着科技的发展,对于语音信号的采集已经有很多种方法,如基于单片机技术、VC,C++等编程、纯硬件电路,本文介绍的方法主要通过一款软件MATLAB。它是MathWorks 公司推出的一种面向工程和科学运算的交互式计算软件, 其中包含了一套非常实用的工具-- 数据采集工具箱。使用此工具箱更容易将实验测量、数据分析和可视化的应用集合在一起。数据采集工具箱提供了一整套的命令和函数, 通过调用这些命令和函数, 可以直接控制数据采集设备的数据采集。 作者简单介绍了一种用声卡进行语音信号采集和MATLAB 的数据采集工具箱进行分析处理的语音信号采集系统。经实验证明, 该系统可实现在线连续采集语音信号并进行分析和处理, 具有实现简单、性价比和灵活度高的特点。 1 语音数据采集系统设计 MATLAB 中提供了强大的数据采集工具箱( DAQ- Data Acquisition Toolbox) , 可满足控制声卡进行数据采集的要求。用户通过调用MATLAB 命令, 可对采集的数据进行分析和处理, 为用户带来了极大的方便。 语音数据采集过程如图1 所示。
图1 声卡采集声音信号有两种方式: 传输线输入方式(LineIn) 和麦克风输入( MicIn) 方式。LineIn 方式是通过传输线把其他声音设备, 如录音机等设备的音频输出信号连接到声卡, 通过声卡记录数据存入计算机。 本系统采用MicIn 方式, 即用麦克风接收语音通过声卡将音频信号存入计算机。利用MicIn 方式通过声卡采集数据有两种方法: 方法一是采用对声卡产生一个模拟输入对象进行采集, 方法二是直接利用MATLAB 数据采集箱中提供的的函数命令进行采集。 1. 1 方法1 本系统是以声卡为对象利用MATLAB 数据采集工具箱提供的环境完成数据采集过程, 麦克风成为数据采集系统中的传感器。数据采集过程与其他硬件设备无关, 只与声卡有关, 因此应对声卡产生一个模拟输入对象(AI) 。 数据采集过程的具体实现: 1) 初始化: 创建设备对象。 ai= analoginput(‘ winsound ’ ) 2) 配置: 根据数据采集硬件设备的特性, 增加通道和控制数据采集的行为。为AI 添加1 个通道, 设置采样频率和采样时间。 addchannel( ai, 1) freq= 8000; % 采样频率fs8000Hz set( AI, sampleRate, freq) %为模拟输入设备设置采样频率 duration= 2; %采样时间为2 秒 set (AI, SamplesPerTriffer, duration* freq) ; % 为模拟输入设备设置触发时间 3) 执行: 启动设备对象, 采集数据。 start( ai) ; %启动设备对象 data= getdata( ai) ; % 获得采样数据 4) 终止: 删除设备对象。 stop( ai) ; % 停止设备对象 语音信号输入 声卡 Matlab 数据采集箱 计算机
交通信号控制系统方案
交通信号 控制系统(ATC)设计方案 x x x x有限责任公司
目录 1.概述 (1) 1.1系统简介 (1) 1.2设计原则 (2) 1.3系统设计依据及执行标准 (4) 2.总体设计方案 (6) 2.1控制系统总体功能 (6) 2.2通信系统总体结构 (6) 2.3通信系统主要优势 (8) 3.详细设计方案 (9) 3.1监测点设备 (9) 3.1.1设备功能描述 (9) 3.1.2监测点设备组成、结构及特点 (9) 3.2防雷保护及安全设计 (14) 3.3详细设备说明 (15) 3.3.1高清晰摄像机 (15) 3.3.2标清视频检测 (15) 3.3.3补光设备 (15) 3.3.4嵌入式存储 (15) 3.3.5 GOE210千兆工业以太网交换机 (15) 3.3.6 POE工业以太网光纤收发器 (17) 3.4系统典型配置清单 (18)
1.概述 城市发展交通智能信号灯,减少道路拥堵,最终达到智能化区域交通信号控制系统。智能交通信号灯迎合实现绿色经济的时代潮流,为了解决这个问题,提出智能交通信号灯及网络技术,会根据路口车辆多少,自动调节时间,可减少等候时间在75%以上,从而大大节省了人们的出行时间,减少了路口的无效等候,使出行更快捷。 在智能交通系统中,以往的常规摄像机是对所有通过该地点的机动车辆的车牌进行拍摄、记录与处理。由于受到图像采集设备分辨率的制约,图片仅能反映出车型、车身颜色、车牌号码等简单信息。公安执法部门对部分治安案件、交通肇事案件的取证要求上,希望能掌握更详细更清楚的资料,如驾驶员的面貌特征、车内驾驶室的情况、清晰的车辆信息、货车的装载情况。采用高清晰摄像机做前端采集,可以实现所抓拍的图像中用肉眼清楚地分辨:车辆的颜色、特征、车牌的号码、车牌颜色、司乘人员的面部特征。 如此一来智能化同时也带来了网络数据流量的剧增,对网络通信的可靠传输提出了更高的要求。工业以太网交换机在区域交通信号控制系统网络中稳定性、高可靠性、高安全性成为关键中的关键。 1.1系统简介 区域交通信号控制系统(ATC) 智能化区域交通信号控制系统采用百万像素的数字化网络摄像机(1600×1200 CCD传感器),一台摄像机覆盖两条车道,准确抓拍正常行驶、压线行驶、并行通过的车辆,并自动识别车牌号码,抓拍的车辆图片可清晰地显示车辆特征及前排司乘人员的面部特征。摄像机工作于外触发方式,通过视频分析、环形线圈或者窄波雷达检测通过车辆,在抓拍车辆的同时可获取车辆的行驶速度。两条车道共用一台高清数字摄像机的方式在保障系统性能的前提下,大大降低了系统成本。
labview声音采集系统
虚拟仪器技术 姓名:史昌波 学号:2131391 指导教师:孙来军 院系(部所):电子工程学院专业:控制工程
目录 1、前言 (3) 2、声卡的硬件结构和特性 (3) 2.1声卡的作用和特点 (3) 2.2声卡的构造 (5) 3、LABVIEW中与声卡相关的函数节点 (5) 4、LABVIEW程序设计 (6) 4.1程序原理 (6) 4.2程序结构 (7) 4.3结果分析 (9) 5、结束语 (9) 6、参考文献 (10)
基于声卡的数据采集与分析 1、前言 虚拟仪器技术是利用高性能的模块化硬件,结合高效灵活的软件来完成各种测试、测量和自动化的应用。在虚拟仪器系统中,硬件解决信号的输入和输出,软件可以方便地修改仪器系统的功能,以适应不同使用者的需要。其中硬件的核心是数据采集卡。目前市售的数据采集卡价格与性能基本成正比,一般比较昂贵1。 随着DSP(数字信号处理)技术走向成熟,计算机声卡可以成为一个优秀的数据采集系统,它同时具有A/D和D/A转换功能,不仅价格低廉,而且兼容性好、性能稳定、灵活通用,驱动程序升级方便,在实验室中,如果测量对象的频率在音频范围,而且对指标没有太高的要求,就可以考虑使用声卡取代常规的DAQ设备。而且LABVIEW中提供了专门用于声卡操作的函数节点,所以用声卡搭建数据采集系统是非常方便的2。 2、声卡的硬件结构和特性 2.1声卡的作用和特点 声卡的主要功能就是经过DSP(数字信号处理)音效芯片的处理,进行模拟音频信号的与数字信号的转换,在实际中,除了音频信号以外,很多信号都在音频范围内,比如机械量信号,某些载波信号等,当我们对这些信号进行采集时,使用声卡作为采集卡是一种很好的解决方案。 声卡的功能主要是录制与播放,编辑与合成处理,MIDI接口三个部分3。 (1)录制与播放
信息采集系统解决方案
信息采集系统解决方案
信息采集系统解决方案 1系统概述 信息采集是信息服务的基础,为信息处理和发布工作提供数据来源支持。信息数据来源的丰富性、准确性、实时性、覆盖度等指标是信息服务的关键一环,对信息服务质量的影响至关重要。针对交通流信息数据,包括流量、速度、密度等,目前主要是基于微波、视频、地磁等固定车辆检测器以及浮动车等移动式车辆检测器进行采集,各种采集方式都存在响应的利弊。针对车驾管以及出入境数据,包括车辆信息、驾驶人信息、出入境办证进度信息等,主要是通过和公安相关的数据库进行对接,此类信息将在信息分析处理系统进行详细介绍。 针对目前交通信息来源的多样性以及今后服务质量水平发展对信息来源种类扩展要求,需要建设一套统一的,具备良好兼容性和前瞻性的交通信息统一接入接口。一方面,本期项目的各种交通信息来源可以使用该接口进行数据接入,另一方面,当新的或第三方的交通信息来源需要加入到本系统中来时,可以使用该接口进行数据接入,不需要再次投入资源进行额外开发。 统一接入接口建成后,根据各种数据来源系统的网络环境、系统技术特性和交通流信息数据特点,开发相应的交通信息数据对接程序,逐一完成微波采集系统、浮动车分析系统、人工采集等来源的交通信息数据采集接入。 2系统架构及功能介绍 2.1统一接入接口 统一接入接口的建设的关键任务包括接口技术规范制定、路网路段编码规则约定及交通信息数据结构约定等多个方面。
2.1.1接口技术规范 一方面由于本系统接入的交通信息数据来源多样,开发语言和系统运行的环境均存在差异,不具备统一的技术特性;另一方面,考虑到以后可能需要接入更多新的或第三方的信息系统作为数据来源,应当选择较成熟和通用的接口实现技术作为本项目的交通流信息采集统一接入接口实现技术。 根据目前信息系统建设的行业现状,选择Web Service和TCP/UDP Socket 作为数据传输接口的实现技术是较优的选择。Web Service和TCP/UDP Socket 具有实时性强、通用性强、应用广泛、技术支持资源丰富等优势,可以实现跨硬件平台、跨操作系统、跨开发语言的数据传输和信息交换。 项目实施时需要根据现有的信息采集系统的技术特点来具体分析,以选定采用Web Service或TCP/UDP Socket作为接口实现技术,必要时可以两种方式并举,提供高兼容度的接口形式。 为了保护接入接口及其数据传输的安全性,避免恶意攻击访问,避免恶意数据窃取,可以使用身份认证、加密传输等技术来加以保证。 统一数据采集接口的工作流程可以如下进行:
基于labview的语音信号采集系统
电气与自动化工程学院《LabVIEW编程实训》评分表课程名称:LabVIEW编程实训 题目:基于labview的语音信号采集系统设计 班级:1601131自动化学号:160113113姓名:刘德旺 指导老师: 年月日
常熟理工学院电气与自动化工程学院《LabVIEW编程实训》技术报告题目:基于LabVIEW的语音信号采集系统设计 姓名:刘德旺 学号:160113113 班级:自动化131 指导教师:陈飞 起止日期:2016年6月20日-7月8日
LabVIEW编程实训答辩记录 自动化专业 1601131班级答辩人刘德旺 题目基于LabVIEW的语音信号采集系统设计 说明:主要记录答辩时所提的问题及答辩人对所提问题的回答
目录 1.任务书 (1) 2.基于LABVIEW的数据采集系统概述 (3) 2.1虚拟仪器概念与传统仪器概念主要区别 (3) 2.1.1LabVIEW虚拟仪器简介 (3) 2.1.2LabVIEW虚拟仪器特点 (3) 2.2 LabVIEW图形化程序的组成与特点 (4) 2.2.1前面版 (4) 2.2.2程序框图 (4) 2.2.3图标和连接器 (5) 3.语音信号采集总体设计方案与硬件配置 (6) 3.1语音信号采集系统的功能分析 (6) 3.2语音信号采集系统的总体构成 (6) 3.3语音信号采集系统的硬件配置 (6) 4.语音信号采集系统的软件设计与功能实现 (11) 4.1语音信号采集系统的软件前面板设计 (11) 4.1.1语音信号采样信息界面 (11) 4.1.2语音采集控制按钮界面 (11) 4.1.3时域波形和频域波形显示界面 (11) 4.2语音信号采集系统的软件程序框图设计 (12) 5.语音信号采集系统的运行与分析 (18) 6.收获与体会 (21) 参考文献 (23)
振动信号的采集与预处理
振动信号的采集与预处理 几乎所有的物理现象都可看作是信号,但这里我们特指动态振动信号。 振动信号采集与一般性模拟信号采集虽有共同之处,但存在的差异更多,因此,在采集振动信号时应注意以下几点: 1. 振动信号采集模式取决于机组当时的工作状态,如稳态、瞬态等; 2. 变转速运行设备的振动信号采集在有条件时应采取同步整周期采集; 3. 所有工作状态下振动信号采集均应符合采样定理。 对信号预处理具有特定要求是振动信号本身的特性所致。信号预处理的功能在一定程度上说是影响后续信号分析的重要因素。预处理方法的选择也要注意以下条件: 1. 在涉及相位计算或显示时尽量不采用抗混滤波; 2. 在计算频谱时采用低通抗混滤波; 3. 在处理瞬态过程中1X矢量、2X矢量的快速处理时采用矢量滤波。 上述第3条是保障瞬态过程符合采样定理的基本条件。在瞬态振动信号采集时,机组转速变化率较高,若依靠采集动态信号(一般需要若干周期)通过后处理获得1X和2X矢量数据,除了效率低下以外,计算机(服务器)资源利用率也不高,且无法做到高分辨分析数据。机组瞬态特征(以波德图、极坐标图和三维频谱图等型式表示)是固有的,当组成这些图谱的数据间隔过大(分辨率过低)时,除许多微小的变化无法表达出来,也会得出误差很大的分析结论,影响故障诊断的准确度。一般来说,三维频谱图要求数据的组数(△rpm分辨率)较少,太多了反而影响对图形的正确识别;但对前面两种分析图谱,则要求较高的分辨率。目前公认的方式是每采集10组静态数据采集1组动态数据,可很好地解决不同图谱对数据分辨率的要求差异。 影响振动信号采集精度的因素包括采集方式、采样频率、量化精度三个因素,采样方式不同,采集信号的精度不同,其中以同步整周期采集为最佳方式;采样频率受制于信号最高频率;量化精度取决于A/D转换的位数,一般采用12位,部分系统采用16位甚至24位。 振动信号的采样过程,严格来说应包含几个方面: 1. 信号适调 由于目前采用的数据采集系统是一种数字化系统,所采用的A/D芯片对信号输入量程有严格限制,为了保证信号转换具有较高的信噪比,信号进入A/D以前,均需进行信号适调。适调包括大信号的衰减处理和弱信号的放大处理,或者对一些直流信号进行偏置处理,使其满足A/D输入量程要求。 2. A/D转换
信号采集与回放系统
信号采集与回放系统 技术报告 电信082班084775240 周霞 (合作者:电信082班084775228 吴迪) 指导教师:倪海燕 2010-5-27
摘要:本设计通过A/D转换和D/A转换实现输入信号与输出信号的变化。通过实验箱上的模式3的ADC输入正弦波信号,设计按键选择,有3种模式分别是直接回放,单次回放,循环回放和定点回放。 关键字:信号回放模式选择 一、实验要求 1. 实现输入,存储,回放信号 2. 回放模式选择(直接回放,单次波形回放,循环回放,分段存储定点回放等) 二、总原理图 三、系统总体方案设计 根据实验要求,TLC5510A 是采样率最高为20MHz的8位并行高速ADC ,FPGA的PIO48输出信号控制ADC1的输出使能信号OE(低电平有效);PIO15为转换时钟信号CLK;AD转换结果送至PIO16~PIO23,并且同时显示在数码管1和数码管2上。ADC的模拟信号输入端在实验箱的左侧,允许输入0~5V的信号。 转换关系:DATA=255×Ain/5
数据从采集到转换结束需要两个半时钟周期 四、软件电路的设计 4.1控制器的设计 用VHDL语言编写控制器的程序,要有读写使能和模式选择。用choose[2]的四个状态分别表示直接回放,单次回放,循环回放和定点回放。 程序如下: library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_unsigned.all; entity control is port ( clk:in std_logic; --时钟 writ:in std_logic; --读写使能 en:in std_logic; --使能 choose:in std_logic_vector(1 downto 0); --模式选择 ch:in std_logic_vector(1 downto 0); --阶段选择 enout:out std_logic; --读写使能输出 adr:out std_logic_vector(9 downto 0) ); --地址 end entity control; architecture behave of control is signal count1:std_logic_vector(9 downto 0); signal count11:std_logic_vector(9 downto 0); signal count2:std_logic_vector(9 downto 0); signal count22:std_logic_vector(9 downto 0); begin process(writ,en,ch,choose) begin if(en='1')then count1<="0000000000";count11<="0000000000"; count2<="0000000000";count22<="0000000000"; elsif (clk'event and clk='1')then if(choose="01")then ---- 单次回放
光纤声音采集系统
摘要:科技的发展带来许多电磁干扰或射频干扰的恶劣环境,要想解决电磁干扰问题的,必须从本质上改变麦克风的工作模式。文章提出了利用激光的传输频带宽、通信容量大和抗电磁干扰能力强等优点,研制一种基于光相位干涉的高灵敏度声音采集系统。光纤声音采集能够传送非常高的声音质量,适用于多种恶劣环境下的声音采集。 关键词:光纤声音采集、干涉型光纤传感器 引言: 麦克风在声场和电场中起着重要的沟通界面,它可将声音信号传至任何地方或者记忆装置。传统型的使用电磁场或静电场来产生动作,外部的强电磁场影响会阻绝这些装置的功能。本项目研制的光纤声音采集系统是一种新颖的声音信号传感器,在反射式强度型光纤传感器的原理基础上,利用激光来采集声音信号,由于它与传统的麦克风有着本质的区别,所以在使用方面具有很大的优越性。系统由非导磁材料制成,其主要工作本体是光,即使在强电磁场或高射频环境中也能正常工作。把光纤应用于麦克风,充分利用了光纤传感器体积小、结构简单、灵敏度高、抗电磁干扰且光纤本身低损耗、耐腐蚀、安全可靠等优良特性。 1、系统结构 本系统利用干涉型光纤传感器的原理,开发基于光相位干涉的高灵敏度声音采集系统,由光纤传感探头、光路系统、光信号调制解调器等部分组成。 干涉型光纤传感器通常将被测量转化为光信号的相位,因此,相位测量是该类型传感器信号处理的基本要求。若直接对相位进行测量,那么有两个问题将限制系统的性能:一是系统受到环境的干扰时被测相位会产生随机漂移,从而引入测量误差,此外,相位漂移还会导致信号衰减;二是直接测相意味着直流检测,信号处理易受电路直流漂移的影响。针对这两个问题引出了相位生成载波技术。相位生成载波调制是在被测信号带宽以外的某一频带之外引入大幅度的相位调制,被测信号则位于调制信号的边带上,这样就把外界干扰的影响转化为对调制信号的影响,且把被测信号频带与低频干扰频带分开,以利于后续的噪声分离。 项目研制的光纤声音采集系统,在对传统michelson干涉仪加以改进的基础上,通过构造由光纤耦合器和振动膜组成的动态michelson干涉光路,能够将外界声压对振膜的作用转化为对光路相位的调制,得到的干涉光信号直接光电转换后即可解调还原声音信号。在多种干涉型光纤传感器的解调方法中,相位生成载波解调技术(pgc)由于是一种无源解调技术,并具有高灵敏度、大动态范围和好的线性度而得到广泛的应用。 2、系统原理 2.1光纤传感探头原理: 激光器发出的激光经耦合器到达传输光纤,由光纤出射的光束照射到振动膜上,传输光纤出射端面m1与振动膜构成一个干涉腔,从两表面反射回的光进行干涉,干涉光再经耦合器由光电探测器接收,外界声音信号通过改变干涉腔的光纤出射端面m1和振动膜之间的距离对光相位进行调制。系统中半导体激光器发出的光源光频随输入的调制电流线性变化,振动膜采用硅微技术进行研制。 2.2解调原理: 光纤声音采集系统中的调制解调器是由光源,光电转换器,高增益微弱信号放大电路,背景噪声消除器等组成。 光源向光纤传感头发射一稳定的激光,传感头内的振动薄膜被周围声音振动信号带动,从而对发射到振动薄膜上的激光进行相位调制后再反射回去,被调制的激光在光路系统里发生干涉,形成携带微弱声音强度的激光信号,光电转换系统的探测器将此激光信号转换成电信号,再经高增益微弱信号放大,pgc解调,噪声滤除,后将解调后的电信号还原成声音信号输出。
交通信号控制系统解决实施方案
交通信号控制系统解决方案 1概述 交通信号控制系统,是智能交通系统(ITS)在交通管理工作中的基本应用,也是城市智能交通管控系统中最直接、最基础的应用系统。通过建设信号控制系统,实现信号路口联网远程控制、交通流量的采集、路口自适应控制、绿波协调控制以及区域的自适应控制,有效减少车辆的停车次数,节省旅行时间;后台实时调整信号配时,采取多时段控制方式,必要时,可通过智能交通管理中心人工干预,直接控制路口交通信号机执行指定相位,有效的疏导交通,减少行车延误,提高通行能力,缓解日益严峻的城区道路交通拥堵压力,提高城区交通综合管理能力,减少汽车尾气排放,美化环境,提升城区形象。 2系统结构设计 系统结构划分为3级:分别为中心控制级设备、区域控制级设备以及路口控制级设备。交通信号控制系统设备主要包括中心设备、前段设备和通信设备。
(1)中心控制级设备 中心控制级设备作用主要是: ?监控整个系统的运行。 ?协调区域控制级的运行。 ?具备区域控制级的所有功能。(2)区域控制级设备 区域控制级设备作用主要是: ?监控受控区域的运行。
?对路口交通信号进行协调控制。 ?对路口交通信号机的工作状态和故障情况进行监视。 ?通过人机回话对路口交通信号机进行人工干预。 ?监视和控制区域级外部设备的运行。 ?进行交通流量统计处理。 (3)路口控制级设备 路口控制级设备即信号机,其作用主要是: ?控制路口交通信号灯。 ?接收处理来自车辆检测器的交通流信息,并定时向区域计算机发送。 ?接收处理来自区域计算机的命令,并向区域计算机反馈工作状态和故障信息。 ?具有单点优化能力。 3系统功能设计 3.1基础功能 (1)区域自适应控制 系统以控制子区作为基本控制单元,综合考虑子区内的交通运行状态(如交通阻塞、交通拥挤、交通顺畅)、交叉口的关联性大小、交叉口的实际交通量,确定公共信号周期与相位差的决策模型,并运用智能优化算法实时优化子区协调控制配时参数,实现控制子区交叉口的协调控制功能。 系统的区域交叉口协调控制能够确保控制区域内的交通流时刻处于最佳运行状态,相邻交叉口之间协调方向的行驶车流可以获得尽可能不停顿的通行权,大大降低车辆在交叉口频繁加减速所产生的交通污染,减少区域交通总的车辆燃油
004-振动信号的采集与预处理
004-振动信号的采集与预处理
振动信号的采集与预处理 1振动信号的采集 振动信号采集与一般性模拟信号采集虽有共同之处,但存在的差异更多。在采集振动信号时应注意以下几点: 1.振动信号采集模式取决于机组当时的工作状态,如稳态、瞬态等; 2.变转速运行设备的振动信号采集在有条件时应采取同步整周期采集; 3.所有工作状态下振动信号采集均应符合采样定理。 1.1 信号适调 由于目前采用的数据采集系统是一种数字化系统,所采用的A/D芯片对信号输入量程有严格限制,为了保证信号转换具有较高的信噪比,信号进入A/D以前,均需进行信号适调。适调包括大信号的衰减处理和弱信号的放大处理,或者对一些直流信号进行偏置处理,使其满足A/D输入量程要求。 1.2 A/D转换 A/D转换包括采样、量化和编码三个组成部分。 1.2.1采样 采样(抽样),是利用采样脉冲序列p(t)从模拟信号x(t)中抽取一系列离散样值,使之成为采样信号x(n△t)(n=0,1,2,…)的过程。△t称为采样间隔,其倒数称1/△t=f s之为采样频率。采样频率的选择必须符合采样定理要求。 1.2.2量化 由于计算机对数据位数进行了规定,采样信号x(n△t)经舍入的方法变为只有有限个有效数
字的数,这个过程称为量化。由于抽样间隔长度是固定的(对当前数据来说),当采样信号落入某一小间隔内,经舍入方法而变为有限值时,则 产生量化误差。如8位二进制为28 =256,即量化增量为所测信号最大电压幅值的1/256。 1.2.3 编码 振动信号经过采样和量化后,量化后的数据按照一定的协议进行编码,成为处理器可以处理的数据。 采样定理解决的问题是确定合理的采样间隔△t 以及合理的采样长度T ,保障采样所得的数字信号能真实地代表原来的连续信号x(t)。 衡量采样速度高低的指标称为采样频率f s 。一般来说,采样频率f s 越高,采样点越密,所获得的数字信号越逼近原信号。为了兼顾计算机存储量和计算工作量,一般保证信号不丢失或歪曲原信号信息就可以满足实际需要了。这个基本要求就是所谓的采样定理,是由Shannon 提出的,也称为Shannon 采样定理。 Shannon 采样定理规定了带限信号不丢失信息的最低采样频率为: 2s m f f ≥或2s m ωω≥ 式中f m 为原信号中最高频率成分的频率。 采集的数据量大小N 为: T N t =? 因此,当采样长度一定时,采样频率越高,采集的数据量就越大。 使用采样频率时有几个问题需要注意。 一, 正确估计原信号中最高频率成分的频率,对于采用电涡流传感器测振的系统来说,一
基于LabView的双声道声卡数据采集系统
基于LabView的双声道声卡数据采集系统班级:热动1007 姓名:刘堂俊学号:U201011568 在虚拟仪器系统中,信号的输入环节一般采用数据采集卡实现。商用的数据采集卡具有完整的数据采集电路和计算机借口电路,但一般比较昂贵,计算机自带声卡是一个优秀的数据采集系统,它具有A/D和D/A转换功能,不仅价格低廉,而且兼容性好、性能稳定、通用性强,软件特别是驱动程序升级方便。如被测对象的频率在音频范围内,同时对采样频率要求不是太高,则可考虑利用声卡构建一个数据采集系统。 1.从数据采集的角度看声卡 1.1声卡的作用 从数据采集的角度来看,声卡是一种音频范围内的数据采集卡,是计算机与外部的模拟量环境联系的重要途径。声卡的主要功能包括录制与播放、编辑和处理、MIDI接口三个部分。 1.2声卡的硬件结构 图1是一个声卡的硬件结构示意图。一般声卡有4~5个对外接口。 图1 声卡的硬件结构示意图 声卡一般有Line In 和Mic In 两个信号输入,其中Line In为双通道输入,Mic In仅作为单通道输入。后者可以接入较弱信号,幅值大约为0.02~0.2V。声音传感器(采用通用的麦克风)信号可通过这个插孔连接到声卡。若由Mic In 输入,由于有前置放大器,容易引入噪声且会导致信号过负荷,故推荐使用Line In ,其噪声干扰小且动态特性良好,可接入幅值约不超过1.5V的信号。另外,输出接口有2个,分别是Wave Out和SPK Out。Wave Out(或LineOut)给出的信号没有经过放大,需要外接功率放大器,例如可以接到有源音箱;SPK Out给出的信号是通过功率放大的信号,可以直接接到喇叭上。这些接口可以用来作为双通道信号发生器的输出。 1.3声卡的工作原理 声音的本质是一种波,表现为振幅、频率、相位等物理量的连续性变化。声卡作为语音信号与计算机的通用接口,其主要功能就是将所获取的模拟音频信号转换为数字信号,经过DSP音效芯片的处理,将该数字信号转换为模拟信号输出。输入时,麦克风或线路输入(Line In)获取的音频信号通过A/D转换器转换成数字信号,送到计算机进行播放、录音等各种处理;输出时,计算机通过总线将数字化的声音信号以PCM(脉冲编码调制)方式送到D/A转换器,变成模拟的音频信号,进而通过功率放大器或线路输出(Line Out)送到音箱等设备转换为声波。
信号与系统课程大纲
《信号与系统》课程教学大纲 英文名称:Signal and System 课程号:13202002 一、课程基本情况 1.学分:3.5 2.学时:56(其中:理论学时:56 实验学时:0上机学时:0 ) 3.课程类别:大类平台必修课 4.适用专业:电子信息类 5.先修课程:高等数学 6.后续课程:数字信号处理、通信原理等 7.开课单位:通信工程 二、课程介绍 《信号与系统》是与通信工程、电子信息工程等专业有关的一门基础学科。 它的主要任务是: 1.在时间域及频率域下研究时间函数f(t)及离散序列x(n)的各种表示方式; 2.在时间域及频率域下研究系统特性的各种描述方式; 3.在时间域及频率域下研究激励信号通过系统时所获得的响应。 信号与系统课程研究信号与系统理论的基本概念和基本分析方法。初步认识如何建立信号与系统的数学模型,经适当的数学分析求解,对所得结果给以物理解释、赋予物理意义。课程的主要内容包括连续系统的时域分析、傅里叶变换、拉普拉斯变换、连续时间系统的s域分析、离散时间系统的时域分析、Z变换、离散时间系统的Z域分析等。要求学生掌握基本概念和基本分析方法。 学习本课程使学生掌握信号与系统的基本理论和基本分析方法,培养学生灵活运用理论知识分析和解决实际问题的能力。 三、课程的主要内容及基本要求 第一章信号与系统概述(共10学时) (一)教学内容: 第一节信号与系统概述 知识要点:信号与系统分析的研究内容与方法,信号与系统理论的应用,信号的定义。 第二节信号的描述和分类 知识要点:信号的描述,信号的分类。
第三节典型基本连续信号 知识要点:正弦信号,指数信号,复指数信号,抽样信号,单位阶跃信号,单位冲激信号。 第四节信号的基本运算 知识要点:信号的微分、积分运算;移位运算,反褶运算,尺度变换运算,以及组合。 第五节冲激信号及其性质 知识要点:冲激信号及其性质,相关计算题。 第六节冲激偶信号及其性质 知识要点:冲激偶信号及其性质,相关计算题。可以作为选讲部分。 第七节信号的分解 知识要点:信号的直流与交流分解,信号的偶、奇分解,信号的实部与虚部分解,信号的脉冲分量分解,信号的正交函数分解。 第八节系统的描述和分类 知识要点:系统的描述,系统的分类,系统的联结。 第九节线性时不变系统 知识要点:连续时间线性时不变系统,离散时间线性时不变系统。 教学重点:信号的分类、典型基本连续信号、冲激信号及其性质、系统的描述,系统的分类。 教学难点:建立信号的概念、建立系统的概念、信号的周期、能量等运算。 (二)教学基本要求: 1.基本知识、基本理论:信号与系统概念,信号与系统的分类,线性时不变系统的特点及分析方法;周期和非周期信号、能量信号和功率信号;基本连续信号的表达方式及其波形;冲激信号及其性质;冲激偶信号及其性质;信号波形相加、相乘、求导、积分的运算;信号波形平移、反转、压缩、扩展的变换;任意连续信号的冲激函数表示;信号的分解;系统的分类,系统的性质;线性时不变系统的性质。 2.能力、技能培养:理解信号的概念,了解不同类型信号的时域表现形式,掌握不同类型信号及系统的识别方法;熟练掌握信号周期的求解方法;掌握典型信号及性质,能够做到给出信号表达式会画信号波形图,给出信号波形图能写出信号表达式;能够用阶跃信号表示分段函数;掌握与冲激信号、冲激偶信号相关的乘积、微分、积分等运算。掌握对多个信号进行相加、相乘,对于不同频率的正弦信号要注意相加、相乘之后的规律;掌握对信号波形进行平移、反转、压缩、扩展的变换;了解系统的概念,了解系统的分类,了解系统的性质;掌握系统的稳定性、因果性、线性时不变性等;掌握线性时不变系统的积分、微分、频率保持、分解等性质。 (三)实践与练习 根据学生学习情况,针对不同层次的学生留作业,作业可以是书后习题,可以由任课教师自选。 (四)考核要求 理解信号与系统的概念及分类,掌握线性时不变系统的特点及分析方法;会判断周期和非周期信号、能量和功率信号,计算信号的功率;会判断是信号否为周期信号,会计算周期信号的周期,
交通信号控制系统
1交通信号控制系统概述交通信号控制系统是智能交通管理系统的重要子系统,其主要功能是自动协 1.1调和控制整个控制区域内交通信号灯的配时方案,均衡路网内交通流运行,使停车次数、延误时间及环境污染减至最小,充分发挥道路系统的交通效益。 必要时,可通过控制中心人工干预,直接控制路口信号机执行指定相位,强制疏导交通。 NATS交通信号控制系统用于城市道路交通的控制与管理,可以提高车速、减少延误、减少交通事故、降低能耗和减轻环境污染。 从上个世纪八十年代中期以来,中国电子科技集团公司第二十八研究所就开始了NATS系统和路口交通信号控制机的研制开发。 该系统通过了国家鉴定验收,获得了国家重大科技攻关成果奖、公安部科技进步一等奖和国家科技进步三等奖。 NATS交通信号控制系统特点: 适合中国城市混合交通的特点,具有自行车控制功能;系统支持多种硬件平台(微机、工作站以及大、中、小型计算机),多种软件平台(WINDOWS 98/NT/2000/XP);支持多种外部设备(动态地图板、室内信息板、室外信息板、违章记录仪…);支持多种系统互联(电视监视系统、地理信息系统、车辆定位系统、违章捕捉系统、信息管理系统…);系统配置灵活、裁剪方便;支持远程控制和维护;支持多种通信方式(光缆、电话线、GPRS/CDMA无线通信、城域网…);系统人机界面友好,显示内容丰富,操作使用方便;与国外同类系统相比,具有很高的性能价格比。 1.2系统结构 1.2.1系统控制应用层结构NATS交通信号控制系统采用三级分布式递阶基本控制结构: 中心控制级,区域控制级,路口控制级(参见下图)。
中心控制级区域控制级1区域控制级2路口控制级路口控制级路口控制级区域控制级N 1.2.2系统基本结构区域监控台动态地图板室内信息板违章捕捉仪区域控制计算机数据通信控制机(光端机)光纤(光端机)(光端机)路口信号机…(光端机)(光端机)路口信号机室外情报板…室外情报板交通信号灯车辆检测器其中: 区域控制计算机监视、控制、协调整个系统的运行,可同时控制128个外部设备,如果外部设备超过128路,可采用多台区域控制计算机。 区域监控台用作交通工程师工作台,实时显示被控区域内的交通状态和信息,下达人机会话命令;数据通信控制机为区域控制计算机与户外设备提供通信通道;路口信号机负责采集、处理、传送交通信息,控制路口信号灯色;环形线圈检测器和微波检测器安装位置可分布在路口或者路段;动态地图板实时显示被控区域内的交通状态。 1.3系统功能 1.3.1系统三级控制功能1)中心控制级监控整个系统的运行;协调区域控制级的运行;具备区域控制级的所有功能。 2)区域控制级监控受控区域的运行;对路口交通信号进行协调控制; 对路口交通信号机的工作状态和故障情况进行监视;通过人机会话对路口交通信号机进行人工干预;监视和控制区域级外部设备的运行;进行交通流量统计处理。 3)路口控制级控制路口交通信号灯;接收处理来自车辆检测器的交通流信息,并定时向区域计算机发送;接收处理来自区域计算机的命令,并向区域计算机反馈工作状态和故障信息;具有单点优化能力。 4)终端控制为了方便灵活地控制系统,系统可挂接终端控制计算机(工作站),终端控制计算机提供与区域控制计算机完全同样的显示操作功能,终端控制计算机既可以是本地的(如放在管控中心),也可以是远程的(如在任何地方通过公安网进行控制)。 1.
生物信号采集系统的使用讲义回顾.doc
计算机生物信号采集处理系统的认识及使用 计算机是一种现代化、高科技的自动信息分析、处理设备。随着电子计算机技术在生物、医学领域的广泛应用,使原先不易进行的某些生物信息的检测,变得简易可行。利用计算机采集、处理生物信息,让计算机进入机能学实验室已成为必然趋势。 计算机生物信号采集处理系统就是以计算机为核心,结合可扩展的软件技术,集成生物放大器与电刺激器,并且具备图形显示、数据存储、数据处理与分析等功能的电生理学实验设备。对生物信号采集系统的了解和熟练使用,是今后对完成生理学实验的数据和图形采集、储存和处理所必须具备的基本技能之一。 一、目的要求 1、熟悉计算机生物信号采集处理系统的基本原理及组成; 2、熟悉并掌握计算机生物信号采集处理系统的基本操作与使用方法。 二、内容 1、学习计算机生物信号采集处理系统的组成及原理; 2、计算机生物信号采集处理系统的基本操作与使用。 三、计算机生物信号采集处理系统的工作原理 现代生物机能实验系统的基本原理是:首先将原始的生物机能信号,包括生物电信号和通过传感器引入的生物非电信号进行放大(有些生物电信号非常微弱,比如减压神经放电,其信号为微伏级信号,如果不进行信号的前置放大,根本无法观察)、滤波(由于在生物信号中夹杂有众多声、光、电等干扰信号,这些干扰信号的幅度往往比生物电信号本身的强度还要大,如果不将这些干扰信号滤除掉,那么可能会因为过大的干扰信号致使有用的生物机能信号本身无法观察)等处理,然后对处理的信号通过模数转换进行数字化并将数字化后的生物机能信号传输到计算机内部,计算机则通过专用的生物机能实验系统软件接收从生物信号放大、采集硬件传入的数字信号,然后对这些收到的信号进行实时处理,一方面进行生物机能波形的显示,另一方面进行生物机能信号的实时存贮,另外,它还可根据操作者的命令对数据进行指定的处理和分析,比如平滑滤波,微积分、频谱分析等。对于存贮在计算机内部的实验数据,生物机能实验系统软件可以随时将其调出进行观察和分析,还可以将重要的实验波形和分析数据进行打印。
三轴加速度传感器的步态识别系统
三轴加速度传感器的步态识别系统 近年来随着微机电系统的发展,加速度传感器已经广泛应用于各个领域并拥有良好的发展前景。例如在智能家居、手势识别、步态识别、跌倒检测等领域,都可以通过加速度传感器实时获得行为数据从而判断出用户的行为情况。 目前许多智能手机都内置多种传感器,通过预装软件就能够获得较精确的原始数据。本文提出一种基于三轴加速度传感器,用智能手机采集用户数据,对数据进行处理及特征提取获得特征矩阵并分类识别的方法,有效地识别了站立、走、跑、跳四种动作。 人体动作识别处理过程主要包含数据采集、预处理、特征提取和分类器识别数据采集数据采集和发送模块安装在用户端,另一个数据接收模块接在电脑终端上。 由于我们制作的采集模块很轻、很小,所以方便佩戴。当用户运动时,三轴加速度传感器会将据采集并通过无线方式发送给电脑接收模块,再通过电脑上的软件部分对采集到的数据进行分析处理,将结果输出,显示用户的实时状态。 本文使用的加速度传感器数据来自于共计60个样本。传感器统一佩戴于腰间。本文选取了其中一位采集者的数据用于主要分析研究,
其余两位采集者的数据则用于验证由第一位采集者数据研究所得的结论,这样的做法既减小了数据处理的繁杂又能保证最终结果的准确性。预处理应用程序设置的采集时间间隔为0.1s,对每一个动作的采集时间为25s。考虑到用户在采集数据一开始与将要结束时的动作不平稳可能对数据带来较大影响,前2s2s采集的数据将被舍弃不予分析。因原始加速度信号一般都含有噪声,为了提高数据分析结果的准确性,通常在原始加速度信号进行特征提取前对其进行去躁、归一化、加窗等预处理。通过加窗处理,不仅规整了加速度信号的长度,而且方便研究人员按照需要选择适宜的信号长度,这样有利于后续的特征提取。 许多研究人员使所示。研究人员采集的加速度传感器信号由于采集者的动作力度不同造成加速度信号的幅度差异较大,这会对之后的分类识别造成负面影响,归一化技术可以调整加速度信号的幅度,按照一定的归一化算法可以使加速度信号的幅度限定在某一数值范围内,文献[2]在识别跑、站立、跳和走路这四种动作时对四种动作的加速度信号进行了归一化;文献[3]在进行手势识别时对手势动作的加速度信号进行了归一化处理。特征提取特征提取和选择模块的作用在于从加速度信号中提取出那些表征人体行为的特征向量,处于预处理模块和分类器模块之间,是人体行为识别过程中的一个重要环节,直接影响分类识别的效果。特征的提取方法具有多样性,对于不同的识别目的,研究人员会提取不同的特征,例如为了识别分类站立和跑步,研究人员通常会选取方差和标准差这类能够反映加速度信号变化大小的特征,而为了识别分类走路和跑步,研究人员通常会选取能量