IGBT的死区补偿方法研究
SVPWM中全新的死区时间效应补偿方法
SVPWM中全新的死区时间效应补偿方法 杨来坡王泰宇徐鸿李千里 安徽中家智锐科技有限公司 摘要:文章对3相逆变的死区时间效应进行了分析,同时给出了一种全新的针对永磁同步电机驱动中死区效应的补偿方法。该方法同时考虑了零电流钳位和寄生电容的影响,经过计算和实际验证,确实改善了死区效应的影响。本方法理论分析的有效性及其实际效果都通过在空调直流电机驱动控制应用中得到了充分验证。 关键词:三电平逆变器;死区时间;补偿;PWM Dead-time compensation in the application of SVPWM Laipo YangTaiyu WangHong XuQianli Li Anhui Cheari Zhi Rui Technology Limited Company Abstract: The Dead-time effect of the three phases bridge inverter is analyzed in this paper. A Dead-time compensation strategy is presented for a permanent-magnet synchronous motor drive taking zero-current damp and parasitic capacitance effects into account. It improves the Dead-time effect, with practicality and little calculation .The validity of theory analysis and this method is proved by the experiment results, the method is applied to the controlling of Air conditioner motor. Keywords: Three-level inverter;Dead time;Compensation;PWM
死区补偿总结
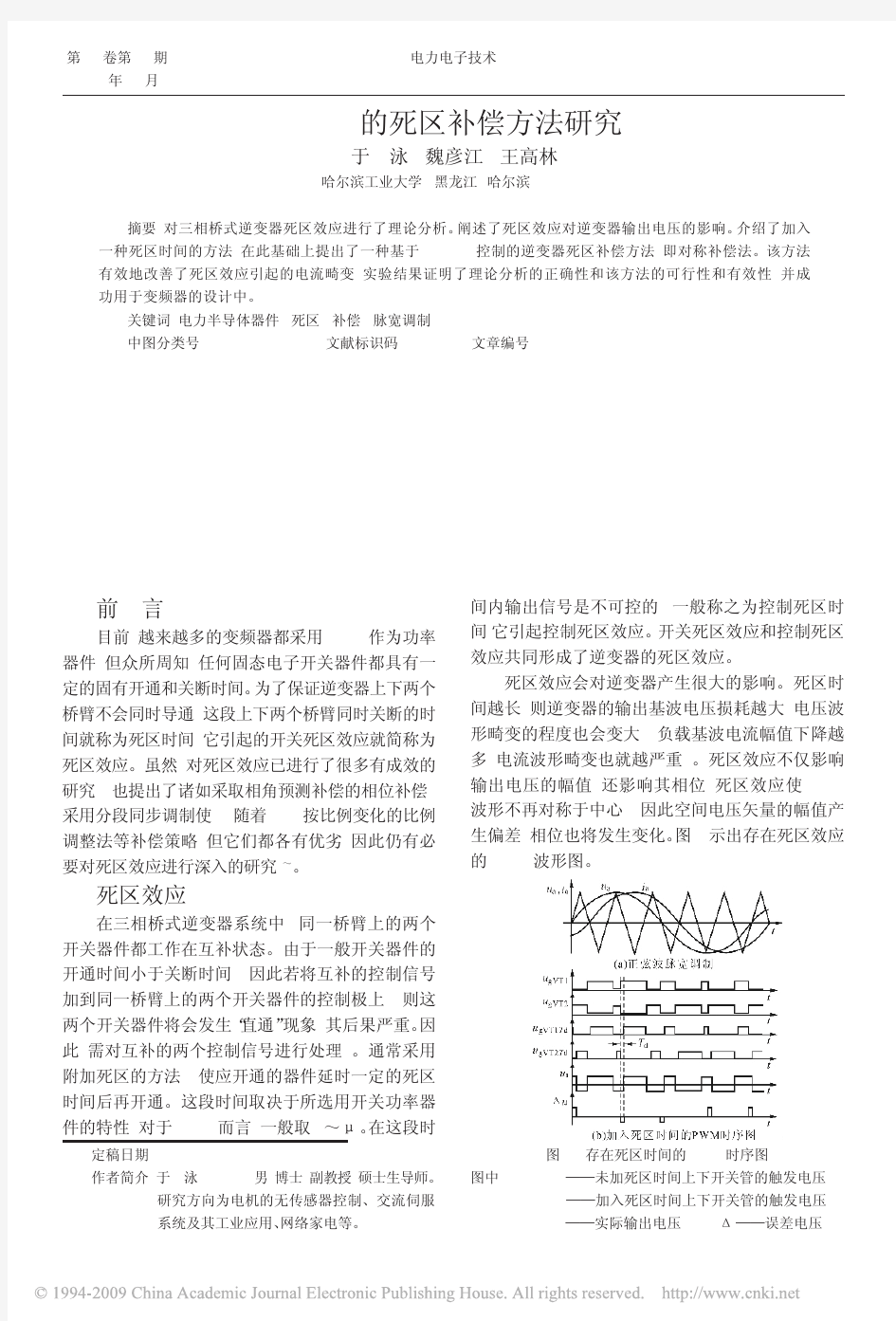
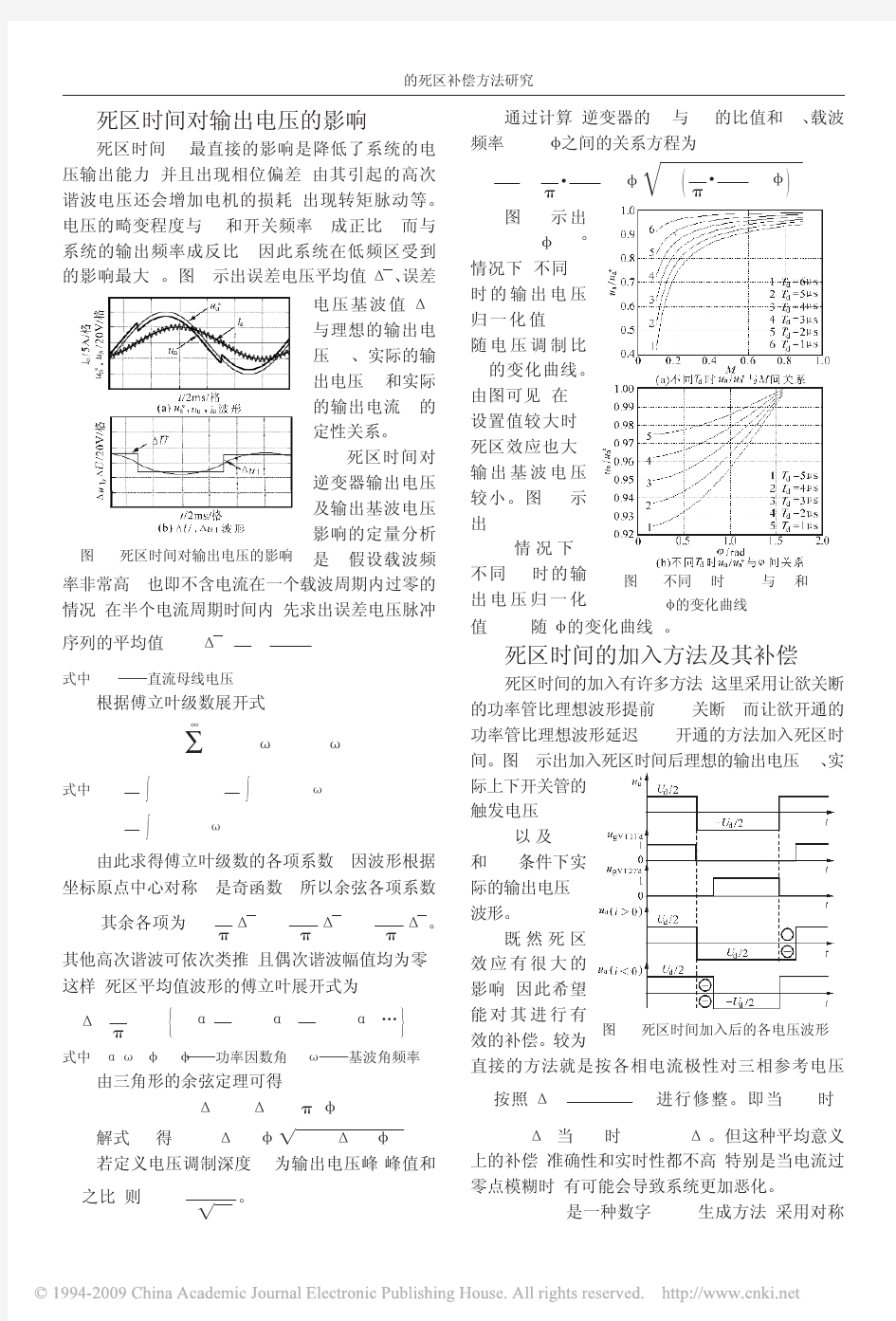
死区补偿技术 清华大学电机系 缪学进 1 引言 微处理和电力电子技术的迅速发展,极大地促进了PWM技术的发展和应用,各种PWM 交流传动技术在工农业生产、国防和日常生活中得到了广泛的应用。我们知道,任何固态的电子开关器件都具有一定的固有开通和关断时间。对于确定的开关器件,固有开通和关断时间内输出信号是不可控制的。三相桥式逆变器系统中,同一桥臂上的两个开关器件工作于互补状态。由于一般开关器件的开通时间小于关断时间,因此,如果将互补的控制信号加到同一桥臂上两个开关器件的控制极上,那么这两个开关器件将会发生“直通”,其后果非常严重。所以目前的逆变器系统广泛采用时间延迟的控制技术即将理想的PWM控制信号上升沿或下降沿延迟一段时间,在这段时间内输出信号是不可控的,这就是死区时间[1]。死区的存在使逆变器不能完全精确复现控制信号的波形,输出电压产生幅值和相位的误差。由于死区的作用,每一个调制周期内引起的微小畸变经积累后,必然会使逆变器的输出电流波形产生畸变,它不但会降低基波幅值,而且会产生低次谐波,直接影响电动机在低速下的运行性能。过去为了消除死区的影响,通常采用硬件和软件相结合的解决方案,但硬件补偿方法存在着检测精度差、滞后以及实现困难等问题。微处理器在电机控制中的应用使死区补偿变得容易,尤其是TI公司的专为电机控制设计的2000系列处理器(如TMS320F240、TMS320LF2407、TMS320F2812等)在芯片内部集成了专门的硬件电路进行死区补偿,减少了电压误差,可以获得满意的效果。 2 死区效应分析 三相电压型逆变器的基本构成如图 1 所示,与电流型逆变器相比,电压型逆变器可以提高逆变器的开关频率,有利于快速控制和抑制逆变器噪声,并且输出阻抗小,适合于交流电机调速控制。 为了防止逆变器区桥臂的上下功率开关发生直通,在上下功率开关改变状态时必须插入死区时间,即先将已开通的功率管关断,插入一定的死区延时,再开通另一个处于关断状态的功率管。
示波器的死区时间
示波器的死区时间 很多客户在选择示波器的时候除了关注带宽、采样率和存储深度外,更关心的就是示波器的死区时间,死区时间的长短直接决定了捕获异常信号的能力大小。示波器的死区时间具体是多少,怎么去计算呢,答案即将揭晓。 1、采样时间、死区时间和捕获时间 数字示波器捕获信号的过程是典型的“采集-处理-采集-处理”过程,如图1所示为数字示波器的采集原理,一个捕获周期由采样时间和(处理时间)死区时间组成,如图2所示。 图1 示波器采集原理图 采样时间:是信号采样存储的过程。 死区时间(处理时间):是示波器对采样存储回来的数字信号进行测量运算,显示等处理的过程。死区时间内示波器不进行采集。 图2 采样时间与死区时间 所以:捕获时间=采样时间+死区时间,而捕获时间又等于波形刷新率的倒数。 波形刷新率即波形捕获率,指的是每秒捕获波形的次数,表示为波形每秒(wfms/s)。 2、死区时间的计算
死区时间的大小影响着遗漏信号的多少,也决定了捕获异常信号概率的大小,那么如何去计算示波器死区时间的大小呢?本次以ZDS2024 Plus示波器为例,ZDS2024 Plus的波形刷新率为330Kwfm/s,将时基档位调制50ns/div,可以看到异常信号闪现在示波器的屏幕上,如图3所示。 图3 ZDS2024 Plus示波器捕获异常信号 根据捕获到的波形进行死区时间的计算,在50ns/div的时基档位下以下为计算的过程: 图4 死区时间计算公式
3、死区时间对捕获信号的影响 上图4和表1为ZDS2024 Plus示波器与普通示波器的死区时间对比,在相同的时基档位下,ZDS2024 Plus有效采样时间为23.1%,普通示波器有效采样时间为0.2%,相当于在1s 内ZDS2024 Plus采集231ms,而普通示波器仅仅采集了20ms,相差20倍以上,如图5所示。 图5 不同示波器死区时间对比 从图5可看出波形刷新率越高,死区时间就越短,捕获异常信号的概率就越高;波形刷新率越低,死区时间就越长,捕获异常信号的概率就越小。 波形刷新率与死区时间就像拍照的瞬间,如下图6所示,拍照的频率越高,中间间隔的时间就越短,能抓拍到一掠而过的飞机的机率就越高,动静结合的美好作品就能呈现在我们眼前。 图6拍照频率对比图
SVPWM的原理讲解
1空间电压矢量调制SVPWM 技术 SVPWM是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近于理想的正弦波形。空间电压矢量PWM与传统的正弦PWM不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。 SVPWM技术与SPWM相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。下面将对该算法进行详细分析阐述。 1.1SVPWM基本原理 SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。逆变电路如图 2-8 示。 设直流母线侧电压为Udc,逆变器输出的三相相电压为UA、UB、UC,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量 UA(t)、UB(t)、UC(t),它们的方向始终在各相
的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。假设Um 为相电压有效值,f 为电源频率,则有: ?????+=-==) 3/2cos()()3/2cos()()cos()(πθπθθm C m B m A U t U U t U U t U (2-27) 其中,ft πθ2=,则三相电压空间矢量相加的合成空间矢量 U(t)就可以表示为: θππj m j C j B A e U e U e U U Us 2 3 3/43/2=++= (2-28) 可见 U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的1.5倍,Um 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,而空间矢量 U(t)在三相坐标轴(a ,b ,c )上的投影就是对称的三相正弦量。 图 2-8 逆变电路 由于逆变器三相桥臂共有6个开关管,为了研究各相上下桥臂不同开关组合时逆变器输出的空间电压矢量,特定义开关函数 Sx ( x = a 、b 、c) 为: ?? ?=下桥臂导通 上桥臂导通 01x S (2-30) (Sa 、Sb 、Sc)的全部可能组合共有八个,包括6个非零矢量 Ul(001)、U2(010)、U3(011)、U4(100)、U5(101)、U6(110)、和两个零矢量
STM32高级定时器死区时间设置探究
STM32高级定时器死区时间设置探究 一、死区设置位置: 决定死区时间设置的位是‘刹车和死区寄存器TIM1->BDTR’中的DTG[7:0],设置范围是0x00~0xff。 二、死区时间设置公式如下: DT为死区持续时间,TDTS为系统时钟周期时长,Tdtg为系统时钟周期时长乘以倍数后的死区设置时间步进值。 在72M的定时器时钟下TDTS=1/72M=13.89ns. 所以以第一个公式,死区时间能以13.89ns的步进从0调整到127*13.89ns=1764ns 第二个公式则能(64+0)*2*13.89~(64+63)*2*13.89=1777.9ns~3528.88ns 换个角度看,就是(128~254)*13.89
同理,第三个公式就是3555.84ns~7000.56ns 换个角度看,就是(256~504)*13.89 第四个公式就是7111.68ns~14001.12ns 换个角度看,就是(512~1008)*13.89 综上: 死区时间就是不同的公式代表不同范围的死区时间设置,这个范围是互不重叠的。而但是在不同的死区时间范围内死区时间设置步进是不同的。 若某个系统时钟下的死区时间不够,可以通过改变定时器时钟来改变最大死区时间范围。 当根据硬件电路的特性定下死区时间后,可以根据目标死区时间范围来找到相应的公式,然后代入公式求解出相应的整数(有时候不一定是整数,那就选择最近的那个),拼接DTG[7:5]+DTG[4:0]即可。 例子:这样当我需要3us的死区持续时间时,则可这么计算: 3us在第二个公式决定的死区范围之内。所以选择第二个公式。 3000/(13.89*2)=108,所以DTG[5:0]=108-64=44,所以DTG=127+44=171=0Xab TIM1->BDTR|=0xab; 反过来验算//72Mhz,死区时间=13.89nsX108*2=3000us 经示波器验证,完全正确。 By zxx2013.07.18
液压泵马达死区补偿
(4)死区补偿控制 滑阀式比例阀在阀芯运动起点(节流阀)或中位附近(方向阀)带有一定的遮盖量(即死区)。该死区减小零位阀芯泄漏,并在例如电源失效或急停工况提供更大安全性。然而阀芯遮盖的影响意味着必须向阀电磁铁线圈提供一定的最小信号值,然后系统中才出现可感觉到的动作。如图11-6(a)所示。 为了降低成本,改善工艺性,比例方向阀的节流边约有15%~20%I max的覆盖量,通常正反两个方向均有死区存在,且其大小不同。为了提高控制质量,需要设法消除该死区,常用的方法是利用阶跃信号产生快调电路,是阀芯迅速越过死区,如图11-6(b)所示。 图11-6(a)死区的形成图11-6(b)死区补偿(5)斜坡控制与方向识别 斜坡信号用于控制信号的上升变化和下降变化的速度(如摊铺机的起步,停机过程,前后行驶控制中死区的过渡等),使当输入阶跃信号时,能够以可调的速率无冲击的到达给定值的要求,从而获得平稳而迅速的起动,转换或停止,进而提高机器的作业效率。放大器上的可调的斜坡函数发生器实际上是通过电位器调整斜坡信号的角度,而不是斜坡时间,如图11-7(a)所示。现代数字控制技术中,为了实现更精确和舒适性的要求,其斜坡的形式利用软件技术可以按人为设计的曲线形式来控制。 在比例方向阀放大器中,象限识别(即方向识别)用于两个运动方向的加速和减速控制,如图11-7(b)所示。图中比例阀控制执行器,电磁铁a通电使缸活塞沿“前进”方向移动。加速度可由加速斜坡A来控制。为了使活塞运动反向,活塞先以由减速斜坡D确定的变化率减速,随着阀芯越过中位和电磁铁b通电,活塞在此以加速斜坡A确定的变化率沿后退方向加速,因而可以看到,在X与Y点之间阀芯在阀体中沿同一方向运动,但阀芯运动速度会在
死区时间设计
设计课题:PWM死区发生器设计与实现设计者: 姓名: 指导教师:
1、系统设计 (4) 1.1设计要求 (4) 1.2方案框图 (4) 2、单元电路的设计 (4) 2.1多谐振荡电路 (4) 2.1.1原理图 (4) 2.1.2工作原理 (5) 2.1.3参数选择 (5) 2.2死区产生电路 (5) 2.2.1原理图 (5) 2.2.2工作原理 (6) 2.2.3参数选择 (6) 3、系统测试结果 (6) 3.1 555引脚3波形 (6) 3.2死区波形 (7) 4、设计总结 (8) 5、参考文献 (8) 6、附录 (8) 元器件清单 (8) 总原理图 (9) PCB图 (9)
555定时器是一种多用途的数字——模拟混合集成电路,利用它能极方便地构成施密特触发器、单稳态触发器和多谐振荡器。由于使用灵活、方便,所以555定时器在波形的产生与变换、测量与控制、家用电器、电子玩具等许多领域中都得到了应用。CD4001是四2输入或非门。或非门的逻辑关系特点是只有当输入端全部为低电平时,输出端为高电平状态;在其余输入情况下,输出端为低电平状态。该电路是一种由555定时器和CD4001为核心器件组成的PWM 死区发生器电路,电路简单且易调试。 关键词:555;CD4001;PWM;死区
1、系统设计 1.1设计要求 ⑴用555及门电路为主芯片 ⑵555芯片<=1片 ,且门电路芯片数<=1片 ⑶开关频率10KHz ⑷输出高电平有效 ⑸占空比可调 ⑹死区时间3us 1.2方案框图 2、单元电路的设计 2.1多谐振荡电路 2.1.1原理图 TRIG 2 OUT 3 4 CVOLT 5 THOLD 6DISCHG 7 8 1 RESET VCC GND U? 555 D2IN4148 D1 IN4148C1103 R14K3 RW15K C2104 VCC R W 2 5K
SVPWM逆变器死区效应补偿方法的研究
SVPWM逆变器死区效应补偿方法的研究 DEAD-TIME COMPENSATION FOR VECTOR-CONTROL INDUCTION MOTOR PWM INVERTER 王高林,贵献国,于泳,徐殿国 (哈尔滨工业大学电气工程系,黑龙江省 哈尔滨市 150001) (Email: Wanggl@https://www.360docs.net/doc/1817941384.html,, Xianggui@https://www.360docs.net/doc/1817941384.html,, Yuyong@https://www.360docs.net/doc/1817941384.html,, Xudiang@https://www.360docs.net/doc/1817941384.html, ) 摘要:针对伺服系统矢量控制系统,提出了一种可以补偿死区误差电压并消除零电流钳位效应的死区补偿方法。在分析了影响死区效应的因素以及等效死区时间的表达式的基础上,采用平均死区时间补偿法,在两相静止轴系中对等效死区时间产生的误差电压进行了补偿。为了提高电流极性检测的准确性,利用旋转轴系中的励磁电流和转矩电流分量经过坐标反变换,判断电流在两相静止轴系所处的扇区来决定需要施加的补偿电压。另外为了更好地消除由于死区时间而产生的零电流钳位效应,将一种消除零电流钳位效应的方法结合到上述补偿方法中。最后通过TMS320F2812 DSP芯片来实现补偿算法,并在11kW 伺服电机矢量控制系统中验证了补偿算法的有效性。 ABSTRACT: A dead-time compensation strategy is presented to compensate dead-time error-voltage and eliminate zero-current clamping effect for servo motor vector control system. The factor influencing dead-time effect is analyzed, and expression of equivalent dead time is deduced. Average dead-time compensation technique is adopted to compensate error-voltage at two-phase stationary frame. To improve accuracy of detection of current direction, components of magnetizing current and torque current are transformed into two-phase stationary frame. Therefore compensating voltage vector can be decided according to the sector the current vector is locating. In addition, a kind of zero-current clamping effect eliminating scheme is adopted combining with the above compensation method to improve the compensation performance. The proposed compensation method is performed with TMS320F2812 DSP chip. Experimental results demonstrate the efficiency of the dead-time compensation method in 11kW servo motor vector control system. 关键词:伺服系统,空间矢量PWM,死区效应,零电流钳位,补偿 KEY WORDS:servo system; space vector PWM; dead-time effect; zero-current clamping; compensation 1 引言 由于伺服系统在各种工业场合应用非常普遍,永磁伺服电机相关控制技术研究也获得了广泛重视,其中空间矢量脉宽调制技术(SVPWM)一直是一个热门的研究课题[1,2]。在SVPWM逆变器中,为了防止同一桥臂的两只开关管产生直通,需要在两只开关管的开通与关断时刻之间加入一定的死区时间,所产生的死区效应会造成逆变器输出电压基波分量减小、输出电流波形畸变及输出转矩脉动[3]。在感应电机矢量控制场合,往往需要知道电压的状态量,由于输出电压是由离散的脉冲组合而成难以测量,通常直接将参考电压当作输出电压。但与参考电压相比,实际的输出电压由于受死区时间影响而与参考电压有所差别。因此为了能够进一步提高感应电机的控制性能,有必要对死区效应进行有效地补偿。 已经有众多学者对死区效应进行了研究,并提出了许多补偿方法[3-10]。这些方法基本上可以分为两种,一种是基于平均误差电压补偿法,这种方法具有易于实现的优点,缺点是补偿不够精确,后来又有学者对开关器件管压降引起的附加死区时间,以及电路中寄生参数对死区效应的影响进行了研究[11,12]。另一类方法是基于脉冲的补偿方法,这种方法可以对死区时间进行较精确地补偿,但对控制芯片的要求也更高,要求在一个PWM载波周期内进行两次采样[12]。死区补偿中电流极性的检测很重要,如果对电流过零点判断不够准确反而会引起误补偿。尽管很多补偿方法能够取得不错的补偿效果,但在低速轻载的场合,经常会发生零电流钳位的现象,使输出电流产生畸变[12]。本文研究了一种采用平均误差电压补偿法并结合消除零电流钳位效应的方法对感应电机PWM逆变器的死区效应进行了补偿,最后在11kW伺服
PWM死区时间
死区时间是PWM输出时,为了使H桥或半H桥的上下管不会因为开关速度问题发生同时导通而设置的一个保护时段。通常也指pwm响应时间。由于IGBT(绝缘栅极型功率管)等功率器件都存在一定的结电容,所以会造成器件导通关断的延迟现象。一般在设计电路时已尽量降低该影响,比如尽量提高控制极驱动电压电流,设置结电容释放回路等。为了使igbt工作可靠,避免由于关断延迟效应造成上下桥臂直通,有必要设置死区时间,也就是上下桥臂同时关断时间。死区时间可有效地避免延迟效应所造成的一个桥臂未完全关断,而另一桥臂又处于导通状态,避免直通炸模块。死区时间大,模块工作更加可靠,但会带来输出波形的失真及降低输出效率。死区时间小,输出波形要好一些,只是会降低可靠性,一般为us级。一般来说死区时间是不可以改变的,只取决于功率元件制作工艺! 死区时间是指控制不到的时间域。在变频器里一般是指功率器件输出电压、电流的“0”区,在传动控制里一般是指电机正反向转换电压、电流的过零时间。死区时间当然越小越好。但是所以设置死区时间,是为了安全。因此又不可没有。最佳的设置是:在保证安全的前提下,越小越好。以不炸功率管、输出不短路为目的(baidu的) 死区时间是PWM输出时,为了使H桥或半H桥的上下管不会因为开关速度问题发生同时导通而设置的一个保护时段,所以在这个时间,上下管都不会有输出,当然会使波形输出中断,死区时间一般只占百分之几的周期。但是PWM波本身占空比小时,空出的部分要比死区还大,所以死区会影响输出的纹波,但应该不是起到决定性作用的。 死区,简单解释:通常,大功率电机、变频器等,末端都是由大功率管、IGBT等元件组成的H桥或3相桥。每个桥的上半桥和下半桥是是绝对不能同时导通的,但高速的PWM驱动信号在达到功率元件的控制极时,往往会由于各种各样的原因产生延迟的效果,造成某个半桥元件在应该关断时没有关断,造成功率元件烧毁。死区就是在上半桥关断后,延迟一段时间再打开下半桥或在下半桥关断后,延迟一段时间再打开上半桥,从而避免功率元件烧毁。这段延迟时间就是死区。(就是上、下半桥的元件都是关断的)死区时间控制在通常的低端单片机所配备的PWM中是没有的。 PWM的上下桥臂的三极管是不能同时导通的。如果同时导通就会是电源两端短路。所以,两路触发信号要在一段时间内都是使三极管断开的。这个区域就叫做“死区”优点就不用说了。缺点是使谐波的含量有所增加。
永磁同步电机逆变器死区补偿技术
永磁同步电机逆变器死区补偿技术 现今工业伺服驱动中多采用驱动永磁同步电动机(PMSM)的交流伺服系统,其交流驱动单元使用三相全桥电压型逆变器。PWM调制的变频控制技术实现了对交流电机动态转矩的实时控制,大大提高了伺服系统的控制性能。 然而,对于PWM逆变器,在驱动功率管的开关信号中插入延时时间以防止直流母线直接短路,延时时间的引入将导致死区时间效应,引起逆变器输出波形的畸变和基波电压的降落,影响了伺服系统性能的进一步提高。 为补偿Td引起的电压波动,研究人员提出了各种补偿方法,大致可划分为三类。 最普遍的方法是在电流极性相同的区间内,根据缺少的脉冲列相应加上极性相反的脉冲列,以抵消其影响。由于三相电流必有一相与另两相极性相反,一种简单的方法是对极性相反的相实行二倍的电压过补偿,使三相电压死区影响相互抵消,线电压波形为正弦形。详细分析了死区产生的原因和影响,并根据模拟调制和数字调制分别给出了死区的硬件电路补偿方法。文献[3]根据全桥电路的开关状态,提出了一种带死区补偿的逆变器数学模型,该模型的特点是由简单的滞环结构组成,根据此模型可由一计算公式实现死区补偿。 第二类方法是根据无效器件原理实现死区补偿的。在任意时刻,逆变器每一桥臂两个功率器件中只有一个是有效的。当上桥臂器件关断时,不论下桥臂器件是否导通,输出电压都是直流母线的负端电压,此时称下桥臂器件是“无效”的。死区补偿的办法是,维持有效器件的驱动信号不变,改变无效器件的驱动信号使之满足设置死区的要求。既然“无效”器件的通、断并不影响输出电压状态,那么也就不需要驱动信号了,只给有效器件发出驱动信号就可以了,这样也就不需要加入死区,也就没有什么死区补偿的问题了。但该方法在电流过零点处会由于误差导致畸变,因此使用这个方法时要注意电流过零区域的处理。一些学者进一步提出了改进方法。在电流过零点加一滞环,在滞环时间内使用正常的开关死区保护,可减小畸变。由于电流采样中的干扰和电流变化的复杂性,文献[5]在电流过零点附近的区域应给出两路驱动信号并加入死区及死区补偿。利用PWM关断时刻实现换流时的开关死区保护,可消除开关死区的影响。 第三类方法是电流预测控制。建立较为准确的电机系统模型,分析电流波形的畸变量,通过电流的预测控制来实现电流波形的校正。提出了预测电流控制的死区问题,通过估计反电势补偿电压波形畸变和电流零点钳位现象。文献[7]建立异步电机模型的矩阵方程,根据对SVPWM算法里定子相电流的预测,补偿其空间电压矢量。利用d-q旋转坐标系下的PMSM 模型设计观测器,观测q轴损失的电压,通过公式折算成需补偿的死区时间Tc,实现死区的在线补偿。时间延迟控制来估计死区导致的干扰电压,并将其反馈到电压参考给定上以补偿死区影响。电流预测方法计算繁琐,且补偿效果与电机模型的精度和时变的参数值直接相关,不易得到满意的效果。 逆变器死区的影响 由PWM死区时间产生的基本原理可知,引起的逆变器输出电压的偏差脉冲在绕组电流周期T1内的电压偏差可用一方波来等效,为了分析方便,假定电压偏差脉冲在时间上是等
如何计算示波器的死区时间
如何计算示波器的死区时间 数字示波器的原理决定了波形观测必然存在死区时间,而死区时间的长短直接影响示波器捕获异常信号的能力。你当前用的示波器的死区时间具体是多少,怎么去计算呢,答案就在此文揭晓。 1、采样时间、死区时间和捕获时间 数字示波器捕获信号的过程是典型的“采集-处理-采集-处理”过程,如图1所示为数字示波器的采集原理,一个捕获周期由采样时间和(处理时间)死区时间组成,如图2所示。 图1 示波器采集原理图 采样时间:是信号采样存储的过程。 死区时间(处理时间):是示波器对采样存储回来的数字信号进行测量运算,显示等处理的过程。死区时间内示波器不进行采集。 图2 采样时间与死区时间 所以:捕获时间=采样时间+死区时间,而捕获时间又等于波形刷新率的倒数。 波形刷新率即波形捕获率,指的是每秒捕获波形的次数,表示为波形每秒(wfms/s)。 2、死区时间的计算 死区时间的大小影响着遗漏信号的多少,也决定了捕获异常信号概率的大小,那么如何去计算示波器死区时间的大小呢?本次以ZDS2024 Plus示波器为例,ZDS2024 Plus的波形刷新率为330Kwfm/s,将时基档位调制50ns/div,可以看到异常信号闪现在示波器的屏幕上,如图3所示。 图3 ZDS2024 Plus示波器捕获异常信号
根据捕获到的波形进行死区时间的计算,在50ns/div的时基档位下以下为计算的过程: 图4 死区时间计算公式 3、死区时间对捕获信号的影响 上图4和表1为ZDS2024 Plus示波器与普通示波器的死区时间对比,在相同的时基档位下,ZDS2024 Plus有效采样时间为23.1%,普通示波器有效采样时间为0.2%,相当于在1s 内ZDS2024 Plus采集231ms,而普通示波器仅仅采集了20ms,相差20倍以上,如图5所示。 图5 不同示波器死区时间对比 从图5可看出波形刷新率越高,死区时间就越短,捕获异常信号的概率就越高;波形刷新率越低,死区时间就越长,捕获异常信号的概率就越小。
三维空间矢量原理说明
三维空间矢量原理说明 0 引言 以往有很多关于不同脉宽调制技术的研究,如正弦波PWM 、跟踪型PWM 和空间矢量调制技术等。但这些只局限在αβ二维,而二维调制技术是无法解决三相四线系统中的中线电流问题。随着用户电力技术的发展,应用于三相四线系统中的UPS 和电能质量补偿器将会得到更多的重视。 本文基于中点引出式三桥臂逆变器,提出一种三维空间矢量脉宽调制(3D SVPWM )方法。这种方法不但可以使中点引出式三桥臂逆变器在应用于三相四线系统时能同时补偿三相谐波和中线电流,还具有开关频率低、补偿效果好等优点。 1 三维空间电压矢量的分布 图1所示是一个并联在三相四线系统中的中点引出式三相电压逆变器。 图1所示逆变器其直流侧零线与系统中线相连接。本文所有关于三维空间适量的讨论都将基于这种中点引出式的三桥臂逆变器结构。 图1中,同一桥臂的2个开关的导通与关断是互补的。若用1表示上半桥臂开关导通,-1表示下半桥臂导通,则可定义开关函数为: ?? ?-=下半桥臂导通 上半桥臂导通1 1j S (1) 假定上半桥臂和下半桥臂的直流电压值相等,dc dc2dc1V V V ==, 此时,每个桥臂的输出电压可以表示为: j dc S V =0U (2) 三维αβ0坐标系中的瞬时电压矢量可以利用下式给出的α-β-0变换得到:
????????????????????-- - =???? ??????c b a v v v v v v 212 12 123232 12 1001 32βα (3) 由此,αβ0座标下的瞬时电压矢量可以表示为: ()00312132dc V v n S n S n S ++=ββα α (4) 式中:2/2/c b a S S S S --=α,c b S S S -=β,c b a S S S S ++=0 表1中列出了三维系统中的电压矢量以及经过αβ0变换后在其直角坐标中的参数。 从图2所示的三维视图中可以更清楚地看出电压矢量的分布。其中矢量},,{642V V V 和},,{531V V V 分别处于不同的水平面上,而2个零矢量分别指向零轴的正方向和负方向。图3是三维空间电压矢量在αβ平面上的分布,可以看出它与传统的二维空间电压矢量的分布是一样的。 2 二维和三维电压矢量的比较 二维的αβ变换实际上是对于三维αβ0变换在不考虑零序分量时的一种简化,可以推想二维的电压脉宽调制也是一种对三维调制的简化。根据表1所给的参数和图2、图3, 传统的二维坐标系中的电压矢量分布应该就是三维电压分布的俯
IGBT模块IPM死区时间设计方法
IGBT模块/IPM死区时间设计方法 死区时间是PWM输出时,为了使H桥或半H桥的上下IGBT管不会因为开关速度问题发生同时导通而设置的一个保护时段。通常也指pwm响应时间。下图是变频空调室外压缩机控制驱动主电路的原理图。 220V交流电压经过由D1~D4和电解电容C1组成的桥式整流和阻容滤波电路后成为给IPM供电的直流电压,六个开关管按照一定规律通断,分别在U、V、W三相输出一系列的矩形信号,通过调整矩形波的频率与占空比达到调节输出电压频率和幅度的目的,即现在应用最广泛的PWM(PULSE WIDTH MODULATE 脉冲宽度调制)控制技术,PWM控制技术从控制思想上可以分成四类:等脉宽PWM法、正弦波PWM法、磁链追踪PWM法和电流追踪型PWM法。不管采用何种控制方式,都必须注意U、V、W任意一相上下两个桥臂不能同时导通,否则直流电源将在IPM内部形成短路,这是绝对不允许的。为了避免电源元件的切换反应不及时可能造成的短路,一定要在控制信号之间设定互锁时间,这个时间又叫换流时间,或者叫死区时间。转载请注明出处:https://www.360docs.net/doc/1817941384.html,/ 由于IGBT(绝缘栅极型功率管)等功率器件都存在一定的结电容,所以会造成器件导通关断的延迟现象。一般在设计电路时已尽量降低该影响,比如尽量提高控制极驱动电压电流,设置结电容释放回路等。为了使igbt工作可靠,避免由于关断延迟效应造成上下桥臂直通,
有必要设置死区时间,也就是上下桥臂同时关断时间。死区时间可有效地避免延迟效应所造成的一个桥臂未完全关断,而另一桥臂又处于导通状态,避免直通炸模块。 死区时间大,模块工作更加可靠,但会带来输出波形的失真及降低输出效率。死区时间小,输出波形要好一些,只是会降低可靠性,一般为us级。一般来说死区时间是不可以改变的,只取决于功率元件制作工艺! 死区时间是指控制不到的时间域。在变频器里一般是指功率器件输出电压、电流的“0”区,在传动控制里一般是指电机正反向转换电压、电流的过零时间。死区时间当然越小越好。但是所以设置死区时间,是为了安全。因此又不可没有。最佳的设置是:在保证安全的前提下,越小越好。以不炸功率管、输出不短路为目的。 1 基本原理推导 ①IGBT及光耦开关时间的定义 IGBT开关时间定义
空间矢量脉宽调制仿真及其谐波分析
文章编号:1005—7277(2005)01—0011—03 V ol.27,N o.12005,27(1):11~13 电气传动自动化 E L ECTRIC D RIVE AUTOMATI O N 2005年第27卷第1期第11页 空间矢量脉宽调制仿真及其谐波分析 康现伟,于克训,刘志华 (华中科技大学电气与电子工程学院,湖北武汉430074) 摘要:在深入分析空间矢量脉宽调制机理的基础上,通过SIMU LINK 给出了其仿真波形,重点对SVPWM 的仿真结果进行了谐波分析,得到了SVPWM 谐波分布的主要特点及影响其谐波分布的几个主要因素,为更有效消除SVPWM 谐波污染提供了理论基础和指导。关键词:空间矢量脉宽调制;谐波;仿真中图分类号:T M921.52 文献标识码:A Simulation and harmonic anal y sis of SVPWM K ANG Xian-wei ,Y U K e-xun ,LIU Zhi-hua (Huazhon g Univ er sit y o f Science and T echnolo gy ,Wuhan 430074,China ) Abstract :Based on the anal y sis of the characteristics of s p ace vector p ulse w idth m odulation (SVPWM ),a series of sim 2ulation w aveforms are illustrated b y the use of S imulink.T he foundational features of the harm onic distributions of SVPWM and the dom inant factors affectin g the distributions are obtained throu g h the anal y sis on the harm onics of the w aveforms ,which p rov ides us theoretical foundation to elim inate the harm onic p ollution.K e y w ords :SVPWM;harm onic ;simulation 1引言 空间矢量脉宽调制(SVPWM )具有线性调制范围宽,直流电压利用率高,易于微处理器实现等优点,它目前被广泛应用于变频器、UPS 、无功补偿器、有源滤波器、储能系统电力变换器等领域。当控制精度要求较高时,必须考虑其谐波问题。 本文首先阐述了空间矢量调制(SVPWM )的基本原理,然后给出了仿真波形,针对空间矢量调制中出现的谐波问题,文章进行了较为详细的分析和论述,得到了影响SVPWM 谐波分布的几个主要因素,从而为其在实际应用中消除谐波污染提供了可靠的理论依据。 2电压空间矢量脉宽调制(SVPWM )原理 对于理想三相正弦系统,电压空间矢量的定义为: V =2/3(V a +V b e j 2π/3+V c e j 4π/3) (1) 对于三相电压源型逆变桥的6个开关,如图1 所示。假设“1”代表上桥臂导通,“0”代表下桥臂导 通,则一共有8种开关模式,分别为V 0(000),V 1(100),V 2(110),V 3(010),V 4(011),V 5(001),V 6(101), V 7(111)。由变换式(1)可得,这8种开关模式在复 平面上分别产生8种电压矢量,其中V 1~V 66个开关模式产生输出电压,而V 0、V 72个开关模式不产生输出电压,称为零矢量。这8个电压矢量将复平 面分为6个区域,如图2所示,按照平行四边形法则,利用这8个空间矢量可以合成在六变形区域内的任何输出电压矢量 。
IGBT(IPM)死区时间的设计方法
IGBT(IPM)死区时间的设计方法 1 基本原理推导 ①IGBT及光耦开关时间的定义 IGBT开关时间定义光耦开关时间定义 ②主电路构成 ③逻辑上的死区时间与IGBT端子(C、E)死区时间的关系 下图给出了控制信号、驱动板输出电压和IGBT 端子(C、E)间电压的相位关系。 各延迟时间分别定义为: t1:开通控制信号-驱动板开通电压信号输出的 延迟时间 t2:驱动板开通电压-IGBT开通输出延迟时间 t3:关断控制信号-驱动板关断电压信号输出的 延迟时间 t4:驱动板关断电压-IGBT关断输出延迟时间 (这里不考虑上下桥臂的差别) 逻辑上设定的死区时间(TD)与IGBT端子(C、 E)死区时间(TD’)的关系如下式。 TD'=TD-(t3+t4)+(t1+t2) (1) 因此逻辑上的死区时间(TD)随延迟时间 t1~t4的大小而变化成实际的死区时间(TD ')。下面分别推导驱动板的延时 (t1、t3)和IGBT延时(t2、t4)。
2 关于死区时间的设计方法 对式TD'=TD-(t3+t4)+(t1+t2)进行变换得 TD=TD'+(t3+t4)-(t1+t2)= TD'+(t3- t1)+(t4-t2) 剩下就是如何界定驱动板的延时 (t1、t3)和IGBT 延时(t2、t4)。设计方法就是分为这两部分进行设计的,分别IGBT 部分的死区时间和HIC 部分的死区时间。 (1)IGBT 部分的死区时间 ①IGBT 开关时间的误差数据的收集及最大误差数据的算出 根据各个公司的IGBT 数据,算出IGBT 开关时间的误差数据(Tj =25℃)。根据σ及X ±4σ计算各IGBT 的X ±4σ.(误差最大)以下给出富士IGBT 的σ值供参考. ○ 600V 系列 σ=0.041(最大) ○1200V 系列 σ=0.063(最大) ②结温为25℃和125℃时的开关时间比率计算 根据数据手册中的结温在25℃和125℃、电流为额定电流时的开关时间(ton,toff),计算温升比率(T125/T25)。 开关时间T(uS) 器件额定电流 符号 结温 Tj=125℃ 时倍率 Min 值 Typ 值 Max 值 25 0.512 (typ-4σ)0.764 1.016 (typ+4σ) Ton 125 1.111 0.568 0.849 1.129 25 0.723 0.975 1.227 1MBI300N-120 Toff 125 1.474 1.065 1.437 1.808 ※σ为富士推荐的最大值0.063。 ③结温为125℃时的开关时间计算 由①和②的结果,两者相乘,可以计算出结温为125℃时的开关时间。 ④驱动条件时Rg,Vge 的比率计算 由于数据手册中给出的数据的条件(Rg,Vge)与实际变频器驱动的条件不同,因此需要计算实际IGBT 驱动条件下的开关时间比率。 ⑤修正开关时间的计算 从4的结果可以及③的结果可以计算出考虑这些比率时结温为125℃时的开关时间。然后可
永磁同步电机空间矢量调制原理与设计
空间矢量调制原理与设计 3.3.1空间矢量调制原理 空间矢量调制技术(SVPWM )是从电机的角度出发,在电机坐标变换理论和电机统一理论的基础上建立电机数学模型,通过逆变器不同开关状态的变化,使电机的实际磁链最大限度的逼近理想磁链圆。SVPWM 的形成是在20世纪80年代,德国科学家H.W.Vanderbroeck 博士在脉宽调制中引入了空间矢量技术,其目标是利用逆变器在不同开关状态下产生的八个基本电压空间矢量(两个零电压空间矢量和六个非零电压空间矢量)合成所需要的电压空间矢量。其主要的思想是在一个PWM 周期内,选择相邻的两个非零电压矢量和零电压矢量,通过合理分配电压矢量的工作时间来合成所需的参考电压空间矢量。跟直接的正弦波调制技术相比,采用SVPWM 算法的逆变器输出电压谐波小,畸变少,从而定子绕组中的电流谐波也少,具有较高的直流电压利用率。SVPWM 的控制方案有三个部分,即三相电压的区间分配、空间矢量的合成和控制算法,一般来说,SVPWM 的算法主要根据以下步骤完成: (1) 判断参考空间电压矢量的所处扇区; (2) 计算所在扇区的开关空间电压矢量的工作时间; (3) 根据电压矢量工作时间合成 PWM 信号。 本文将三相逆变器及永磁同步电机结合起来分析SVPWM 算法的原理,如图2-3所示。其输出电压由三对功率开关器件控制开通,由于逆变器的上桥臂和下桥臂开关状态互补,因此可以用a 、b 、c 三个功率器件的开关状态来描述逆变器的工作状态,共有八种组合,分别对应着八种开关模式下的线电压和相电压,如表2-1所示,其中1代表功率器件的开状态,0代表关状态。与三相电压对应的α-β坐标系下的方程为 ??????????????????????-- -=??????C B A U U U u u 232302121132βα 图2-3 三相逆变器及负载结构图 表2-1中所列的us α、us β电压值为基本空间矢量的α、β分量,其对应着是开关管的开关信号(a, b , c )。根据8种开关序列所产生的2个零电压空间矢量和6个非零基本电压空间矢量可以得到如图2-4所示的SVPWM 空间电压矢量图。 表2-1 功率器件不同开关模式下的相电压和线电压和空间矢量
死区时间的影响与形成
死区时间参数 摘要:针对不同厂家IP M要求的死区时间参数的不同,本文从硬件电路角度出发,提出一种延时电路方案,解决了因参数调整而引起软件的不统一问题,进而为M C U的大批量m a s k降低成本提供可能。 关键词:IP M死区时间 随着现代电力电子技术的飞速发展,以绝缘栅双晶体管(IG B T)为代表的功率器件在越来越多的场合得到广泛地应用。I GB T是V D MO S与双极晶体管的组合器件,集M OS FE T与G T R的优点于一身,既具有输入阻抗高,开关速度快,热稳定性好和驱动电路简单的长处,又具有通态电压低,耐压高和承受大电流的优点,特别适合于电机控制。现代逐渐得到普遍推广的变频空调,其内部的压缩机控制单元就是采用以I GB T为主要功率器件的新型智能模块(IP M)。 IP M(智能功率模块)即In te l li ge n t P o we r Mo d ul e的缩写,它是将输出功率器件I GB T和驱动电路、多种保护电路集成在同一模块内,与普通I G B T相比,在系统性能和可靠性上均有进一步提高,而且由于IP M通态损耗和开关损耗都比较低,使散热器的尺寸减小,故整个系统的尺寸减小。下面是IP M内部的电路框图: IP M内部含有门极驱动控制、故障检测和多种保护电路。保护电路分别检测过流、短路、过热、电源欠压等故障,当任一故障出现时,内部电路会封锁驱动信号并向外送出故障信号,以便外部的控制器及时处理现场,避免器件受到进一步损坏。下图是变频空调室外压缩机控制驱动主电路的原理图。
220V交流电压经过由D1~D4和电解电容C1组成的桥式整流和阻容滤波电路后成为给I PM供电的直流电压,六个开关管按照一定规律通断,分别在U、V、W三相输出一系列的矩形信号,通过调整矩形波的频率与占空比达到调节输出电压频率和幅度的目的,即现在应用最广泛的P WM(PU LS E WI D TH M OD UL A TE 脉冲宽度调制)控制技术,PW M控制技术从控制思想上可以分成四类:等脉宽PW M法、正弦波P WM法、磁链追踪PW M法和电流追踪型P W M法。不管采用何种控制方式,都必须注意U、V、W任意一相上下两个桥臂不能同时导通,否则直流电源将在IP M内部形成短路,这是绝对不允许的。为了避免电源元件的切换反应不及时可能造成的短路,一定要在控制信号之间设定互锁时间,这个时间又叫换流时间,或者叫死区时间。 死区时间,一般情况下软件工程师在程序设计时就会考虑并写进控制软件。但是,由于不同公司生产的I P M,对死区时间长短的要求不尽相同,这样软件就会出现多个版本,不便于管理,并且影响CP U的M AS K (掩模)工作。为了控制软件的统一性,有的软件工程师将死区时间放到芯片外扩展的E2中,对不同公司的I P M,只需改变一下E2中的数据,即可简单实现死区时间的匹配。这种方法的缺点是生产成本较高,在实际应用时受到一定限制。随着集成电路工艺的不断改进,各种逻辑门集成电路的价格不断地下降,使采用硬件电路实现死区时间设定应用到生产上成为可能,这种方法的优点是电路简单,延时时间方便可调,成本低廉。 方案原理图如下图3: