Clark变换与Park变换详解

Clark 变换与Park 变换详解
很多同学对Clark 变换与Park 变换不求甚解,在运用的时候常常感到困惑,本文梳理了这两种变化的详细步骤,希望可以帮到大家。
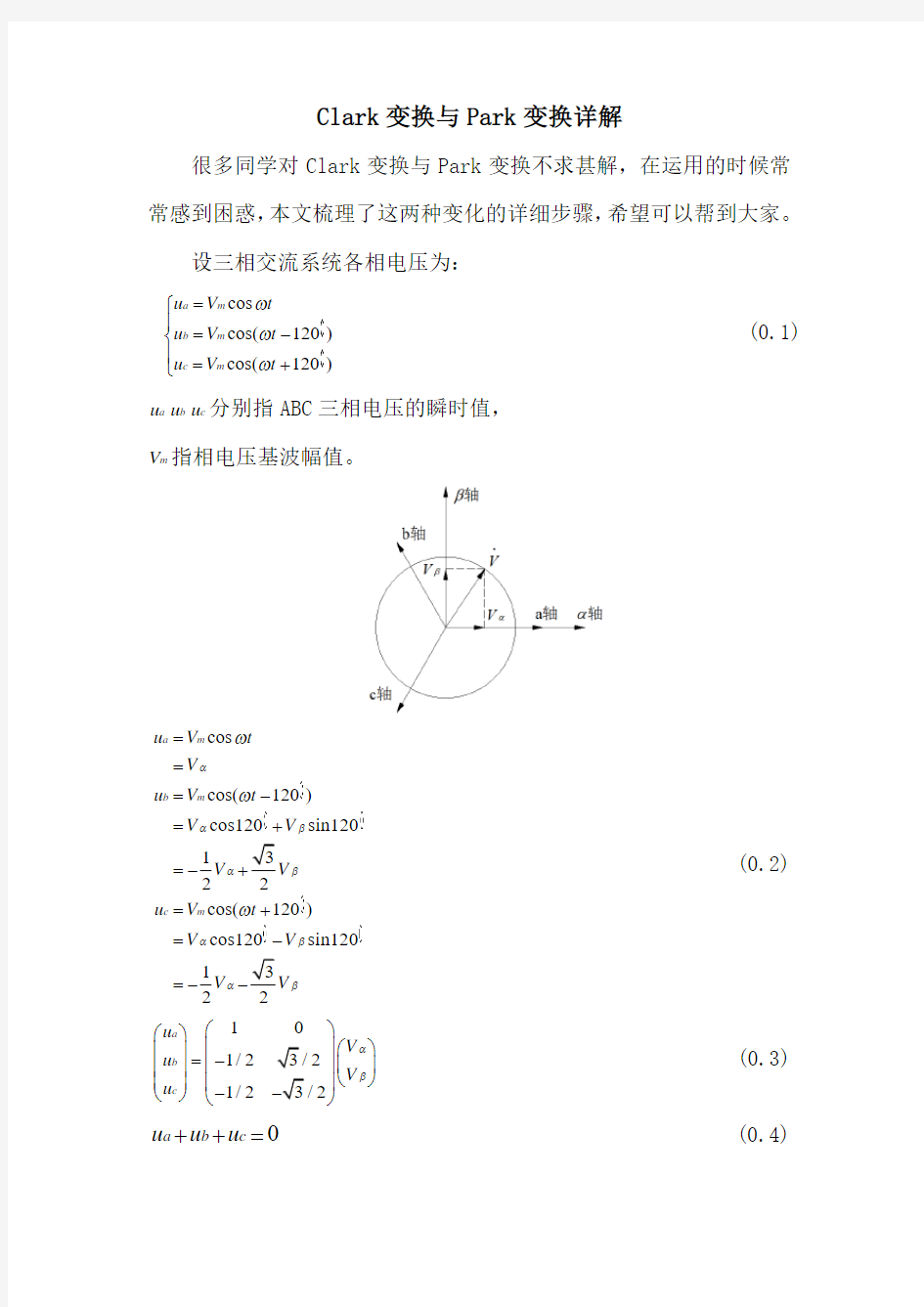
设三相交流系统各相电压为:
cos cos(120)cos(120)
a m
b m
c m u V t
u V t u V t ωωω=??=-??=+? (0.1) a u b u c u 分别指ABC 三相电压的瞬时值,
m V 指相电压基波幅值。
cos cos(120)
cos120sin120
1
22cos(120)
cos120sin120
122a m b m c m u V t
V u V t V V V u V t V V V α
αβαβαβαβ
ωωω===-=+=-+=+=-=--
(0.2)
1
01/22
1/22a b c u V u V u αβ??
?? ??? ?=- ? ? ???
? ?-???? (0.3)
0a b c u u u ++=
(0.4)
现在要求的是如何找到一个矩阵P 使
a b c u V P u V u αβ???? ?= ? ??? ???
(0.5) 书上有两种表达式
11/21/211/21/22302/20/22P P ----???== ?????
与 (0.6) 于是有同学开始疑问了,为什么?为什么非得是这种表达形式?
由Clark 变换推出Park 变换
cos sin sin cos d q d q u u u u u u αβαααα+=??-=?
(0.7) cos sin sin cos d q u u u u αβαααα??????= ? ???-??????
(0.8) 由式(1.7)可以得:
22cos sin cos cos sin sin cos sin d q d q u u u u u u αβαααααααα
?+=??-=?? (0.9) 两式相加有:
cos sin d u u u αβαα=+ (0.10)
22cos sin sin sin cos sin cos cos d q d q u u u u u u αβαααααααα
?+=??-=??
(0.11)
两式相减有:
sin cos q u u u αβαα=- (0.12) 可得:
cos sin sin cos d q u u u u αβαααα??????= ? ???-??????
(0.13) 将式(1.5)代入(1.13)中可得: cos cos(120)cos(120)23sin sin(120)sin(120)a d b q c u u u u u α
ααααα????-+?? ?
= ? ? ?
-+???? ??? (0.14)
Matlab_Simulink中Clark变换和Park变换的深度总结教程文件
M a t l a b_S i m u l i n k中C l a r k变换和P a r k 变换的深度总结
Matlab_Simulink中Clark变换和Park变换的深度总结 最近搞三相并网逆变系统,对这个坐标变换产生了很多疑惑。调模型,排错,最后发现坐标变换这个地方出来的波形总是和我设想的不一样。以前认为坐标变换都是死的,带公式即可,经过这几天的研究,发现这里面真的有些方法。基于MATLAB/Simulink中的模块,我也发现了Simulink中和一些书上不一样的地方。而且现在这个坐标变换每本书上的表示方法都不一样,甚至字母都有好多种。下面我想基于MATLAB/Simulink深刻的总结一下三相交流控制系统常用的两个变换Clark(3-2)变换和Park(2-2)变换。 首先来搞清楚为什么要用这两个变换,在三相交流系统中,常用的控制器还是经典的PI调节器。PI调节器可以对直流量进行无净差的调节,而交流量就不行,所以需要将三相交流分量转化为两项直流分量加以控制。 接下来看看Clark变换(3-2)原理。由于三相分量幅值相等,相位相差120,角速度相等,因此三相分量存在信息冗余,这时,可以去掉一项将其化为两相,这就是Clark变换的作用。由于两项分量所在的坐标轴是静止的,所以我们把此坐标轴称为两相静止坐标系。也就是说平面上的原来基于三相静止坐标系的矢量,可以切换到两相静止坐标系表示。变换的原则是投影原则+等幅值等效原则(DPC时用功率等效原则)。 仅供学习与交流,如有侵权请联系网站删除谢谢2
令A与alfa轴重合,按照变换原则,计算投影ABC分量在alfa、beta上的投影,按照等复制变换原则导出变换矩阵方程如下。 11 1 222 333 A B C α β ???? -- ? ???? ? = ???? ? ???? - ??? ? Simulink中的3/2变换也是基于此变换进行的。但是,在电气工程中为大家熟知的三相正序的相序是,A为0,B为-120,C为120(也可以是-240).如果按照图中所标注的方向进行坐标变换,那一定要将相序变为负序,也就是说A为0,B为120,C为-120. 如果坚持用传统正序,那么再按上式变换之后的坐标进行变换的话,beta轴就反向了。也就是说,采用A为0,B为-120,C为120的相序,利用上面的变换方程进行变换的结果是,beta滞后alfa 90°. A(alfa) C B Beta 下面再看Simulink中的波形图。 这是传统的正序的三相正弦交流电。(A为0,B为120,C为-120)下面用Simulink自带的坐标变换模块进行3/2变换。波形如下。 仅供学习与交流,如有侵权请联系网站删除谢谢3
Clarke变换与Park变换
1918年,Fortescue提出对称分量法,为解决多相(三相)不对称交流系统的分析和计算提供了一个有效方法。对称分量法是用于线性系统的坐标变换法。它将不对称多相系统(后面均以三相系统为代表)以同等待定变量的三个三相对称系统来代替,其中正序、负序系统是两个对称、相序相反的三相系统;零序系统是一个三相幅值相同、三相量同相的系统,用来反映三相量之和不为零的不平衡量。 CLARKE 变换 首先是将基于 3 轴、2 维的定子静止坐标系的各物理量变换到 2 轴的定子静止坐标系中。该过程称为Clarke 变换, PARK 变换 此刻,已获得基于αβ 2轴正交坐标系的定子电流矢量。下一步是将其变换至随转子磁通同步旋转的 2 轴系统中。该变换称为Park 变换 在矢量控制中包括以下系统变换 从三相变换成二相系统Clarke 变换 直角坐标系的旋转(αβ静止)到(旋转d q),称为Park 变换 反之为Park 反变换 关于park变换 从数学意义上讲,park变换没有什么,只是一个坐标变换而已,从abc坐标变换到dq0坐标,ua,ub,uc,ia,ib,ic,磁链a,磁链b,磁链c这些量都变换到dq0坐标中,如果有需要可以逆变换回来。 从物理意义上讲,park变换就是将ia,ib,ic电流投影,等效到d,q轴上,将定子上的电流都等效到直轴和交轴上去。对于稳态来说,这么一等效之后,iq,id正好就是一个常数了。 从观察者的角度来说,我们的观察点已经从定子转移到转子上去,我们不再关心定子三个绕组所产生的旋转磁场,而是关心这个等效之后的直轴和交轴所产生的旋转磁场了。 Clarke变换将原来的三相绕组上的电压回路方程式简化成两相绕组上的电压回路方程式,从三相钉子A-B—C坐标系变换到两相定子α-β坐标系。也称为3/2变换。 但Clarke变换后,转矩仍然依靠转子通量,为了方便控制和计算,再对其进行Park变换变换后的坐标系以转子相同的速度旋转,且d 轴与转子磁通位置相同,则转矩表达式仅与θ有关。 id、iq可以通过对iA、iB、iC的Clarke变换(3/2变换)和Park变换(交/直变换)求得,因此id、iq是直流量。
坐标变换总结Clark变换和Park变换
一个坐标系的坐标变换为另一种坐标系的坐标的法则。 由于交流异步电动机的电压、电流、磁通和电磁转矩各物理量之间是相互关联的强耦合,并且其转矩正比与主磁通与电流,而这两个物理量是随时间变化的函数,在异步电机数学模型中将出现两个变量的乘积项,因此,又为多变量,非线性系统(关键是有一个复杂的电感矩阵),这使得建立异步电动机的准确数学模型相当困难。为了简化电机的数学模型,需从简化磁链入手。 解决的思路与基本分析: 1.已知,三相( ABC )异步电动机的定子三相绕组空间上互差120度,且通以时间上互差120 ω的旋转磁场。 度的三相正弦交流电时,在空间上会建立一个角速度为 1 又知,取空间上互相垂直的(α,β)两相绕组,且在绕组中通以互差90度的两相平衡交流电流时,也能建立与三相绕组等效的旋转磁场。此时的电机数学模型有所简化。 2. 还知, 直流电机的磁链关系为: F---励磁绕组 轴线---主磁通的方向,即轴线在d轴上,称为直轴(Direct axis)。 A---电枢绕组 轴线---由于电枢绕组是旋转的,通过电刷馈入的直流电产生电枢磁动势,其轴线始终被限定在q轴,即与d轴成90度,称为交轴(Quadrature axis)。 由于q轴磁动势与d轴主磁通成正交,因此电枢磁通对主磁通影响甚微。换言之,主磁通唯一地由励磁电流决定,由此建立的直流电机的数学模型十分简化。 如果能够将三项交流电机的物理模型等效的变换成类似的模型,分析和控制就变得大大简单了。 电机模型彼此等效的原则:不同坐标系下产生的磁动势(大小、旋转)完全一致。 关于旋转磁动势的认识: 1) 产生旋转磁动势并不一定非要三相绕组不可。结论是:
关于Clark变换与Park变换
错误!未找到引用源。对Clark 变换与Park 变换的理解 设三相交流系统各相电压为: cos cos(120)cos(120)a m b m c m u V t u V t u V t ωωω=??=-??=+? 错误!未找到引用源。 a u b u c u 是指ABC 三相电压的瞬时值, m V 是指相电压基波幅值。 cos cos(120)cos120sin1201322 cos(120)cos120sin1201322 a m b m c m u V t V u V t V V V V u V t V V V V α αβαβ αβαβ ωωω===-=+=-+=+=-=-- 错误!未找到引用源。 1 01/23/21/23/2a b c u V u V u αβ???? ??? ?=- ? ? ??? ? ?--???? 错误!未找到引用源。 0a b c u u u ++= 错误!未找到引用源。 现在要求的是如何找到一个矩阵P 使 a b c u V P u V u αβ?? ?? ? = ? ??? ? ?? 错误!未找到引用源。 书上有两种表达式
11/2 1/21 1/2 1/222330 3/23/203/23/2P P ----???? == ? ?--?? ?? 与 错误!未找到引用 源。 WHY?? 为什么非得是这种表达形式? 由Clark 变换推出Park 变换 cos sin sin cos d q d q u u u u u u α βαααα+=?? -=? 错误!未找到引用源。 cos sin sin cos d q u u u u αβααα α?????? = ? ???-?????? 错误!未找到引用源。 由式(1.7)可以得: 2 2 cos sin cos cos sin sin cos sin d q d q u u u u u u αβαααα αααα ?+=??-=?? 错误!未找到引用源。 两式相加有: cos sin d u u u αβαα=+ 错误!未找到引用源。 2 2 cos sin sin sin cos sin cos cos d q d q u u u u u u αβαααα αααα ?+=??-=?? 错误!未找到引用源。 两式相减有: sin cos q u u u αβαα=- 错误!未找到引用源。 可得: cos sin sin cos d q u u u u αβααα α?????? = ? ???-?????? 错误!未找到引用源。 将式(1.5)代入(1.13)中可得: cos cos(120)cos(120)23sin sin(120)sin(120)a d b q c u u u u u αααα αα?? ??-+?? ? = ? ? ?-+???? ??? 错误!未找到引用源。
Matlab_Simulink中Clark变换和Park变换的深度总结
Matlab_Simulink 中Clark 变换和Park 变换的深度总结 最近搞三相并网逆变系统,对这个坐标变换产生了很多疑惑。调模型,排错,最后发现坐标变换这个地方出来的波形总是和我设想的不一样。以前认为坐标变换都是死的,带公式即可,经过这几天的研究,发现这里面真的有些方法。基于MATLAB/Simulink 中的模块,我也发现了Simulink 中和一些书上不一样的地方。而且现在这个坐标变换每本书上的表示方法都不一样,甚至字母都有好多种。下面我想基于MATLAB/Simulink 深刻的总结一下三相交流控制系统常用的两个变换Clark (3-2)变换和Park (2-2)变换。 首先来搞清楚为什么要用这两个变换,在三相交流系统中,常用的控制器还是经典的PI 调节器。PI 调节器可以对直流量进行无净差的调节,而交流量就不行,所以需要将三相交流分量转化为两项直流分量加以控制。 接下来看看Clark 变换(3-2)原理。由于三相分量幅值相等,相位相差120,角速度相等,因此三相分量存在信息冗余,这时,可以去掉一项将其化为两相,这就是Clark 变换的作用。由于两项分量所在的坐标轴是静止的,所以我们把此坐标轴称为两相静止坐标系。也就是说平面上的原来基于三相静止坐标系的矢量,可以切换到两相静止坐标系表示。变换的原则是投影原则+等幅值等效原则(DPC 时用功率等效原则)。 令A 与alfa 轴重合,按照变换原则,计算投影ABC 分量在alfa 、beta 上的投影,按照 等复制变换原则导出变换矩阵方程如下。 11122230A B C αβ????-- ????? =???? ???? ??? Simulink 中的3/2变换也是基于此变换进行的。但是,在电气工程中为大家熟知的三相正序的相序是,A 为0,B 为-120,C 为120(也可以是-240).如果按照图中所标注的方向进行坐标变换,那一定要将相序变为负序,也就是说A 为0,B 为120,C 为-120. 如果坚持用传统正序,那么再按上式变换之后的坐标进行变换的话,beta 轴就反向了。也就是说,采用A 为0,B 为-120,C 为120的相序,利用上面的变换方程进行变换的结果是,beta 滞后alfa 90°.
park,clark和ipark浅析
原文地址:park,clark和ipark浅析作者:温暖小屋 相信做过电动机矢量控制或者直接转矩控制的朋友们肯定会对park,clark,ipark变换再熟悉不过了,肯定有人认为没有必要写这个东西。其实我写这个东西只是为了加深自己对上面三种变化的理解,因为今天我在调程序的时候,这三个变换把我弄糊涂了。 好,下面先来介绍这三个变换。 Clark变换。为什么会有这三个变换呢,从宏观上来讲,三相异步电动机是三相对称的交流供电,那么既然三相对称,我们可以用两相交流电来产生和三相交流相同的磁场效应,这样一来,我们只剩下了两相。经过变换之后,以前三相对称,相隔120o,而经过变换之后,变成了两相想间隔90o的交流供电。计算过程如下: 变换过程如图1.1所示。 图1.1 clark变换过程 我们看到Ia,Ib和Ic都三相对称的交流,而Iq和Id是两相间隔90°的交流电。那么变换之后的效果如下图1.2所示。 图1.2 clark变换后效果 在控制电动的过程中,clark变换的输入输出为图1.3所示。
图1.3 clark变换模块图 这里As和Bs是想间隔120°的输入正弦信号,而Alpha和Beta是想间隔90°的输出 正弦信号。所以这的As和Bs分别对应上面的Ia和Ib,而Alpha和Beta分别对应上面 的Id和Iq。 Park变换。我们知道,我们现在讨论的坐标都是在定子角度来看的,也就是静止坐标。我们知道,三相异步电动机是高耦合,非线性,多变量的系统,控制起来非常困难。矢量 控制的思想就是要实现三相电动机的解耦控制,什么意思呢,就是要像控制直流电动机那 样去控制三相电动机,可以分别对励磁电流和转矩电流分别控制,有人问,怎么实现,我 回答:马上就可以实现。我们上面说了,clark变换就是将三相变成两相,但这时候还是静止的,但是相对转子是旋转的,我们要实现解耦控制,就要实现坐标相对转子静止,park 变换这个时候可以派上用场了。Park变换的输入输出如图1.4所示。 图1.4 park变换模块图 上面Alpha和Beta是相对定子静止的两相正弦信号,想间隔90°,而Angle是转子相 对定子的角度。通过这三个变量,可以将相对定子静止的坐标变成相对转子静止的坐标。 变换过程如图1.5所示。 图1.5 park变换过程
sin下关于Clark变换与Park变换
对Clark变换与Park变换的理解 设三相交流系统各相电压为: sin sin(120) sin(120) a m b m c m u V t u V t u V t ω ω ω = ? ? =- ? ?=+ ? (1.1) a u b u c u是指ABC三相电压的瞬时值, m V 是指相电压基波幅值。 cos() sin() m m V V t V V t α β ω ω = = sin sin(120) cos120sin120 13 2 sin(120) cos120sin120 13 22 a m b m c m u V t V u V t V V V u V t V V V β βα βα βα βα ω ω ω = = =- =- =- =+ =+ =-+ (1.2) 01 3/21/2 321/2 a b c u V u V u α β ?? ?? ??? ?=-- ? ? ? ?? ? ? - ???? (1.3) a b c u u u ++=(1.4)
a b c u V P u V u αβ?? ?? ? = ? ??? ? ?? (1.5) 203232311212P ?? -= ?--?? 由Clark 变换推出Park 变换 cos sin sin cos d q d q u u u u u u α βαααα+=?? -=? (1.7) cos sin sin cos d q u u u u αβααα α?????? = ? ???-?????? (1.8) 由式(1.7)可以得: 2 2 cos sin cos cos sin sin cos sin d q d q u u u u u u αβαααα αααα ?+=??-=?? (1.9) 两式相加有: cos sin d u u u αβαα=+ (1.10) 2 2 cos sin sin sin cos sin cos cos d q d q u u u u u u αβαααα αααα ?+=??-=?? (1.11) 两式相减有: sin cos q u u u αβαα=- (1.12) 可得: cos sin sin cos d q u u u u αβααα α?????? = ? ???-?????? (1.13) 将式(1.5)代入(1.13)中可得:
Clark变换与Park变换(修订版)
对Clark 变换与Park 变换的理解 设三相交流系统各相电压为: cos cos(120)cos(120)a m b m c m u V t u V t u V t ωωω=??=-??=+? (1.1) a u b u c u 是指ABC 三相电压的瞬时值, m V 是指相电压基波幅值。 cos cos(120)cos120sin12012cos(120)cos120sin12012a m b m c m u V t V u V t V V V u V t V V V α αβαβ αβαβ ωωω===-=+=-=+=-=- (1.2) 1 01/221/22a b c u V u V u αβ???? ??? ?=- ? ? ??? ? ?-???? (1.3) 0a b c u u u ++= (1.4) 现在要求的是如何找到一个矩阵P 使 a b c u V P u V u αβ?? ?? ? = ? ??? ? ?? (1.5) 书上有两种表达式
11/21/211/21/2 2 3022022 P P ---- ??? == ?? ??? 与(1.6) 其中的2/3和根号下的2/3都是经验值,如果用2/3的话后面的park需要补偿,直接采取根号下2/3就可以。 由Clark变换推出Park变换 cos sin sin cos d q d q u u u u u u α β αα αα += ? ? -= ? (1.7) cos sin sin cos d q u u u u α β αα αα ?????? = ? ??? - ?????? (1.8) 由式(1.7)可以得: 2 2 cos sin cos cos sin sin cos sin d q d q u u u u u u α β αααα αααα ?+= ? ? -= ?? (1.9) 两式相加有: cos sin d u u u αβ αα =+(1.10) 2 2 cos sin sin sin cos sin cos cos d q d q u u u u u u α β αααα αααα ?+= ? ? -= ?? (1.11) 两式相减有: sin cos q u u u αβ αα =-(1.12) 可得: cos sin sin cos d q u u u u α β αα αα ?????? = ? ??? - ?????? (1.13) (原文这里应该是错了,正确的是第二行的sina是负的,cosa是正的,这是我的算法,如果不正确期望大家指正,但是最后仿真结果是对的) 至于clark和park的逆变换,矩阵直接求逆即可. 说明:当q轴超前d轴90度,且a角为d轴与A轴的夹角,这样的话结果就是 cos sin sin cos d q u u u u α β αα αα ?????? = ? ??? - ?????? 和书上的一样。产生差异的原因是dq轴的选取不同
克拉克(CLARKE)和帕克(PARK)变换
克拉克(CLARKE)和帕克(PARK)变换 1918年,Fortescue提出对称分量法,为解决多相(三相)不对称交流系统的分析和计算提供了一个有效方法。对称分量法是用于线性系统的坐标变换法。它将不对称多相系统(后面均以三相系统为代表)以同等待定变量的三个三相对称系统来代替,其中正序、负序系统是两个对称、相序相反的三相系统;零序系统是一个三相幅值相同、三相量同相的系统,用来反映三相量之和不为零的不平衡量。CLARKE 变换 首先是将基于3 轴、2 维的定子静止坐标系的各物理量变换到2 轴的定子静止坐标系中。该过程称为Clarke 变换, PARK 变换 此刻,已获得基于αβ 2轴正交坐标系的定子电流矢量。下一步是将其变换至随转子磁通同步旋转的2 轴系统中。该变换称为Park变换 在矢量控制中包括以下系统变换 从三相变换成二相系统Clarke变换 直角坐标系的旋转(αβ静止)到(旋转d q),称为Park 变换反之为Park 反变换 关于park变换 从数学意义上讲,park变换没有什么,只是一个坐标变换而已,从abc坐标变换到dq0坐标,ua,ub,uc,ia,ib,ic,磁链a,磁链b,磁链c这些量都变换到dq0坐标中,如果有需要可以逆变换回来。
从物理意义上讲,park变换就是将ia,ib,ic电流投影,等效到d,q轴上,将定子上的电流都等效到直轴和交轴上去。对于稳态来说,这么一等效之后,iq,id正好就是一个常数了。 从观察者的角度来说,我们的观察点已经从定子转移到转子上去,我们不再关心定子三个绕组所产生的旋转磁场,而是关心这个等效之后的直轴和交轴所产生的旋转磁场了。 Clarke变换将原来的三相绕组上的电压回路方程式简化成两相绕组上的电压回路方程式,从三相钉子A-B—C坐标系变换到两相定子α-β坐标系。也称为3/2变换。 但Clarke变换后,转矩仍然依靠转子通量,为了方便控制和计算,再对其进行Park变换变换后的坐标系以转子相同的速度旋转,且d 轴与转子磁通位置相同,则转矩表达式仅与θ有关。 详解: 一, 最近在搞双馈反应发电机(下称DFIG),搞着搞着对乱七八糟的坐标变换上火了。尤其是双PWM的控制,好多文章上都用了开关函数。没错,在三相坐标下开关函数就类似于阶跃函数一样,很容易理解;但是被变换到dq0坐标系中就完全乱了。小整理一下,以下如有纰漏,请予以河蟹。 二, 派克变换在李光琦的那本《电力系统暂态分析》中是这样定义:
park变换.doc
派克变换,是将abc相变量系统各电磁量(电流、电压、磁链等),转换到以转子纵轴d、横轴q及静止轴0为坐标轴的dqo轴变量系统,使按相坐标建立的具有时变电感的变系数微分方程,变换为轴坐标表示的电感为常数的常系数微分方程。由于定子与转子之间有相对运动及转子纵轴、横轴磁路不对称,绕组间的磁祸合将随转子转角不同而周期变化。不仅互感是转子角度的函数,定子绕组自感也受转子位置的影响。 同步电机的坐标变换 首先,我们以同步电机中各绕组的空间位置以及电流的方向来看电磁之间的关系: d b 图1 同步发电机的绕组空间位置 由于各绕组是相互耦合的,与各绕组相交链的磁通将包括本绕组电流所产生的磁通和由其他绕组的电流产生而与本绕组交链的那部分磁通。所以磁链方程为:
?? ?? ?? ??? ? ??---?????????? ??=?????????? ??Q D f c b a QQ QD Qf Qc Qb Qa DQ DD Df Dc Db Da fQ fD ff fc fb fa cQ cD cf cc cb ca bQ bD bf bc bb ba aQ aD af ac ab aa Q D f c b a i i i i i i L M M M M M M L M M M M M M L M M M M M M L M M M M M M L M M M M M M L ψψψψψψ 下面我们分析一下各自的自感与互感的系数。首先我们知道电机的旋转磁场 与各定子绕组相交链的磁通的磁路发生周期性变换且周期为,由于电感与磁阻成 反比,与绕组匝数的平方成正比。所以定子绕组的自感也成周期性变化。 )120(2cos )120(2cos 2cos 202020?++=?-+=+=θθθ l l L l l L l l L cc bb aa 0l 为自感的平均值,2l 为自感的变化部分。 由于定子绕组间的空间位置相差120度,使得定子绕组间的互感恒为负值。 [] [][] )150(2cos )90(2cos )30(2cos 202020?++-==?-+-==?++-==θθθm m M M m m M M m m M M ac ca cb bc ba ab 0m 为互感的平均值,2m 为互感变化部分。 转子上的转子绕组电流产生的磁通,其磁路的磁阻总是不变得,所以各绕组自感是常数,转子绕组间的互感系数也是常数。直轴与交轴的互感系数均为零。 定子绕组与转子绕组的互感系数,根据转子绕组产生的磁场方向与各相绕组的轴线的关系,定子与直轴绕组的互感关系为周期为2π的余弦关系: )120cos()120cos(cos ?+==?-====θθθcf fc cf bf fb bf af fa af m M M m M M m M M ) 120cos()120cos(cos ?+==?-====θθθcD Dc cD bD Db bD aD Da aD m M M m M M m M M 而由于转子交轴超前于直轴90度则定子绕组与交轴的阻尼绕组之间的互感关系为: ) 120sin()120sin(sin ?+-==?--==-==θθθcQ Qc cQ bQ Qb bQ aQ Qa aQ m M M m M M m M M 有park 变换不唯一,在这比较一下两种不同系数的,一种是修正之后的,一种是原始的park 变换。 即列出变换矩阵为P 为修正之后的Park 变换,Q 为原始的Park 变换。
Matlab-Simulink中Clark变换和Park变换的深度总结
Matlab_Simulink中Clark变换和Park变换的深度总结 最近搞三相并网逆变系统,对这个坐标变换产生了很多疑惑。调模型,排错,最后发现坐标变换这个地方出来的波形总是和我设想的不一样。以前认为坐标变换都是死的,带公式即可,经过这几天的研究,发现这里面真的有些方法。基于MATLAB/Simulink中的模块,我也发现了Simulink中和一些书上不一样的地方。而且现在这个坐标变换每本书上的表示方法都不一样,甚至字母都有好多种。下面我想基于MATLAB/Simulink深刻的总结一下三相交流控制系统常用的两个变换Clark(3-2)变换和Park(2-2)变换。 首先来搞清楚为什么要用这两个变换,在三相交流系统中,常用的控制器还是经典的PI 调节器。PI调节器可以对直流量进行无净差的调节,而交流量就不行,所以需要将三相交流分量转化为两项直流分量加以控制。 接下来看看Clark变换(3-2)原理。由于三相分量幅值相等,相位相差120,角速度相等,因此三相分量存在信息冗余,这时,可以去掉一项将其化为两相,这就是Clark变换的作用。由于两项分量所在的坐标轴是静止的,所以我们把此坐标轴称为两相静止坐标系。也就是说平面上的原来基于三相静止坐标系的矢量,可以切换到两相静止坐标系表示。变换的原则是投影原则+等幅值等效原则(DPC时用功率等效原则)。 令A与alfa轴重合,按照变换原则,计算投影ABC分量在alfa、beta上的投影,按照等复制变换原则导出变换矩阵方程如下。
11122230A B C αβ????-- ????? =???? ???? ??? Simulink 中的3/2变换也是基于此变换进行的。但是,在电气工程中为大家熟知的三相正序的相序是,A 为0,B 为-120,C 为120(也可以是-240).如果按照图中所标注的方向进行坐标变换,那一定要将相序变为负序,也就是说A 为0,B 为120,C 为-120. 如果坚持用传统正序,那么再按上式变换之后的坐标进行变换的话,beta 轴就反向了。也就是说,采用A 为0,B 为-120,C 为120的相序,利用上面的变换方程进行变换的结果是,beta 滞后alfa 90°. 下面再看Simulink 中的波形图。 这是传统的正序的三相正弦交流电。(A 为0,B 为120,C 为-120)下面用 Simulink 自带的坐标变换模块进行3/2变换。波形如下。
CLARKE 变换PARK 变换
CLARKE 变换PARK 变换 1918年,Fortescue提出对称分量法,为解决多相(三相)不对称交流系统的分析和计算提供了一个有效方法。对称分量法是用于线性系统的坐标变换法。它将不对称多相系统(后面均以三相系统为代表)以同等待定变量的三个三相对称系统来代替,其中正序、负序系统是两个对称、相序相反的三相系统;零序系统是一个三相幅值相同、三相量同相的系统,用来反映三相量之和不为零的不平衡量。 CLARKE 变换 首先是将基于3 轴、2 维的定子静止坐标系的各物理量变换到2 轴的定子静止坐标系中。该过程称为Clarke 变换,PARK 变换 此刻,已获得基于αβ 2轴正交坐标系的定子电流矢量。下一步是将其变换至随转子磁通同步旋转的2 轴系统中。该变换称为Park 变换 在矢量控制中包括以下系统变换 ?? 从三相变换成二相系统Clarke 变换 ?? 直角坐标系的旋转(αβ静止)到(旋转d q),称为Park 变换 反之为Park 反变换 关于park变换
从数学意义上讲,park变换没有什么,只是一个坐标变换而已,从abc坐标变换到dq0坐标,ua,ub,uc,ia,ib,ic,磁链a, 磁链b,磁链c这些量都变换到dq0坐标中,如果有需要可以逆变换回来。 从物理意义上讲,park变换就是将ia,ib,ic电流投影,等效 到d,q轴上,将定子上的电流都等效到直轴和交轴上去。对于稳态来说,这么一等效之后,iq,id正好就是一个常数了。从观察者的角度来说,我们的观察点已经从定子转移到转子上去,我们不再关心定子三个绕组所产生的旋转磁场,而是关心这个等效之后的直轴和交轴所产生的旋转磁场了。Clarke变换将原来的三相绕组上的电压回路方程式简化成 两相绕组上的电压回路方程式,从三相钉子A-B—C坐标 系变换到两相定子α-β坐标系。也称为3/2变换。但Clarke变换后,转矩仍然依靠转子通量,为了方便控制和计算,再对其进行Park变换变换后的坐标系以转子相同的 速度旋转,且d 轴与转子磁通位置相同,则转矩表达式仅与θ有关。 id、iq可以通过对iA、iB、iC的Clarke变换(3/2变换)和Park 变换(交/直变换)求得,因此id、iq是直流量。28