matlab旋转实现(最近邻值,双线性,三次卷积插值实现插值)
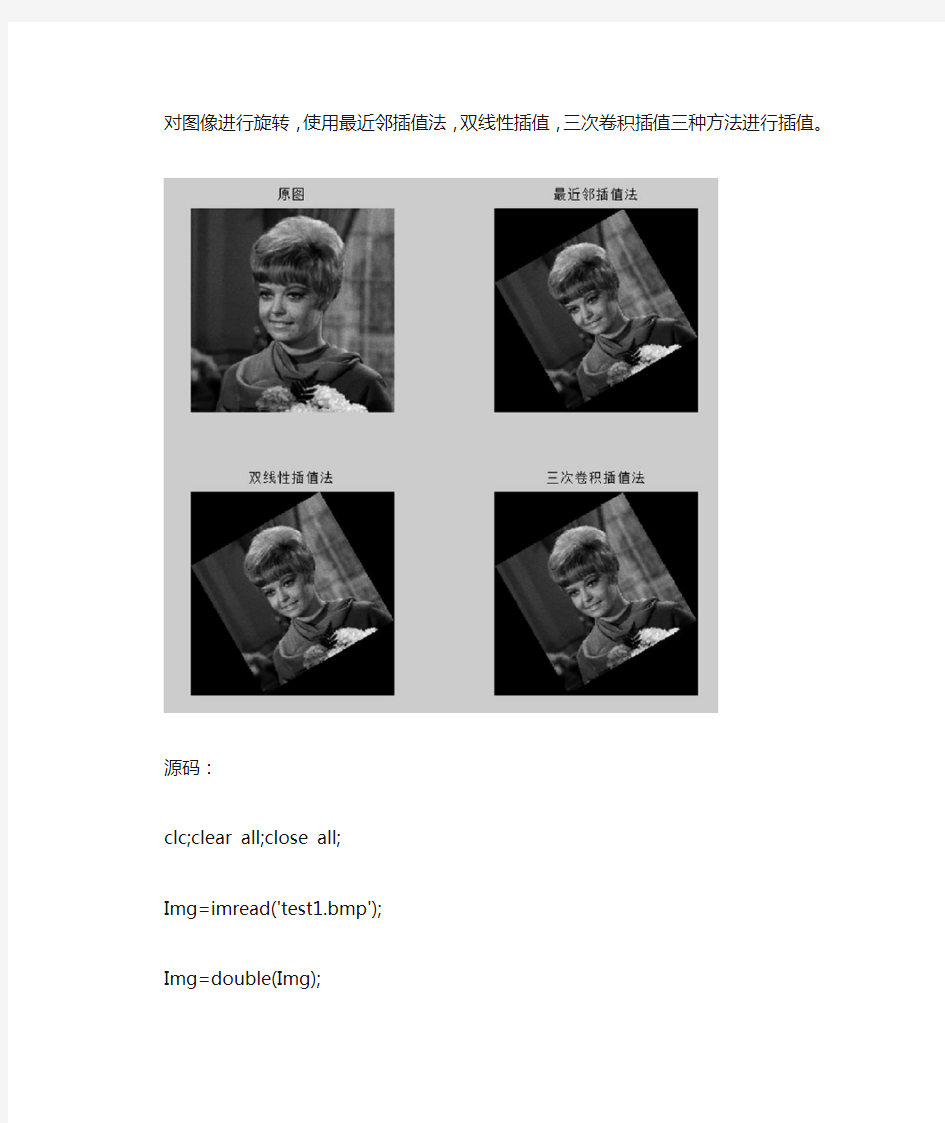
对图像进行旋转,使用最近邻插值法,双线性插值,三次卷积插值三种方法进行插值。
源码:
clc;clear all;close all;
Img=imread('test1.bmp');
Img=double(Img);
[h w]=size(Img);
alpha=pi/6; %逆时针旋转的角度
wnew=w*cos(alpha)+h*sin(alpha); %新图像的宽width
hnew=w*sin(alpha)+h*cos(alpha); %新图像的高heighth
wnew=ceil(wnew); %取整
hnew=ceil(hnew);
u0=w*sin(alpha); %平移量
T=[cos(alpha),sin(alpha);-sin(alpha),cos(alpha)]; %变换矩阵
Imgnew1=zeros(hnew,wnew);
Imgnew2=zeros(hnew,wnew);
Imgnew3=zeros(hnew,wnew);
for u=1:hnew %u和v是新图像坐标,变换到原图像坐标x和y中。
for v=1:wnew
tem=T*([u;v]-[u0;0]);
x=tem(1);
y=tem(2);
if x>=1 & x<=h & y>=1 & y<=w %若变换出的x和y在原图像范围内
x_low=floor(x);
x_up=ceil(x);
y_low=floor(y);
y_up=ceil(y);
if (x-x_low)<=(x_up-x) %采用最近点法,选取距离最近点的像素赋给新图像x=x_low;
else
x=x_up;
end
if (y-y_low)<=(y_up-y)
y=y_low;
else
y=y_up;
end
p1=Img(x_low,y_low); %双线性插值,p1到p4是(x,y)周围的四个点p2=Img(x_up,y_low);
p3=Img(x_low,y_low);
p4=Img(x_up,y_up);
s=x-x_low;
t=y-y_low;
Imgnew1(u,v)=Img(x,y);
Imgnew2(u,v)=(1-s)*(1-t)*p1+(1-s)*t*p3+(1-t)*s*p2+s*t*p4;
end
if x>=2 & x<=h-2 & y>=2 & y<=w-2 %若变换出的x和y在原图像范围内x_1=floor(x)-1;
x_2=floor(x);
x_3=floor(x)+1;
x_4=floor(x)+2;
y_1=floor(y)-1;
y_2=floor(y);
y_3=floor(y)+1;
y_4=floor(y)+2;
A=[sw(1+x-x_2),sw(x-x_2),sw(1-(x-x_2)),sw(2-(x-x_2))];
C=[sw(1+y-y_2),sw(y-y_2),sw(1-(y-y_2)),sw(2-(y-y_2))];
B=[ Img(x_1,y_1),Img(x_1,y_2),Img(x_1,y_3),Img(x_1,y_4);
Img(x_2,y_1),Img(x_2,y_2),Img(x_2,y_3),Img(x_2,y_4);
Img(x_3,y_1),Img(x_3,y_2),Img(x_3,y_3),Img(x_3,y_4);
Img(x_4,y_1),Img(x_4,y_2),Img(x_4,y_3),Img(x_4,y_4)];
Imgnew3(u,v)=A*B*C';
end
end
end
subplot(2,2,1),imshow(Img,[]),title('原图');
subplot(2,2,2),imshow(Imgnew1,[]),title('最近邻插值法'); subplot(2,2,3),imshow(Imgnew2,[]),title('双线性插值法'); subplot(2,2,4),imshow(Imgnew3,[]),title('三次卷积插值法');
matlab插值法实例
Several Typical Interpolation in Matlab Lagrange Interpolation Supposing: If x=175, while y=? Solution: Lagrange Interpolation in Matlab: function y=lagrange(x0,y0,x); n=length(x0);m=length(x); for i=1:m z=x(i); s=0.0; for k=1:n p=1.0; for j=1:n if j~=k p=p*(z-x0(j))/(x0(k)-x0(j)); end end s=p*y0(k)+s; end y(i)=s; end input: x0=[144 169 225] y0=[12 13 15] y=lagrange(x0,y0,175) obtain the answer: x0 = 144 169 225 y0 = 12 13 15 y = 13.2302
Spline Interpolation Solution : Input x=[ 1 4 9 6];y=[ 1 4 9 6];x=[ 1 4 9 6];pp=spline(x,y) pp = form: 'pp' breaks: [1 4 6 9] coefs: [3x4 double] pieces: 3 order: 4 dim: 1 output : pp.coefs ans = -0.0500 0.5333 -0.8167 1.0000 -0.0500 0.0833 1.0333 2.0000 -0.0500 -0.2167 0.7667 4.0000 It shows the coefficients of cubic spline polynomial , so: S (x )=, 169,3)9(1484.0)9(0063.0)9(0008.0,94,2)4(2714.0)4(0183.0)4(0008 .0, 41,1)1(4024.0)1(0254.0)1(0008.0232 3 23≥≤+-+---≥≤+-+---≥≤+-+---x x x x x x x x x x x x Newton’s Interpolation Resolve 65 Solution: Newton’s Interpolation in matlab : function yi=newint(x,y,xi); n=length(x); ny=length(y); if n~=ny error end Y=zeros(n);Y(:,1)=y';
三次样条插值---matlab实现
计算方法实验—三次样条插值 机电学院075094-19 苏建加 20091002764 题目:求压紧三次样条曲线,经过点(-3,2),(-2,0),(1,3),(4,1),而且一阶导 数边界条件S'(-3)=-1;S'(4)=1。 解:首先计算下面的值: 记 1--=j j j x x h ; 1++=j j j j h h h u ;1=+j j u λ ; ?? ????????---+=-++++-j j j j j j j j j j j h y y h y y h h x x x f 1111 111],,[ ;M j =)(''j x s ;],,[611+-=j j j j x x x f d ; h1=-2-(-3)=1;h2=1-(-2)=3;h3=4-1=3; u1=1/4;u2=3/6; d1=6/4*(3/3-(-2)/1)=4.5;d2=6/6*(-2/3-3/3)=-5/3; 由于边界条件S'(-3)=-1;S'(4)=1,得到如下 式子: d0=6/1*(-2/1-(-1))=-6; d3=6/3*(1-(-2)/3)=10/3; 所以得到4个含参数m0~m3 的线性代数方程组为: 2.0000 1.0000 0 0 m0 0.2500 2.0000 0.7500 0 m1 0 0.5000 2.0000 0.5000 m2 0 0 1.0000 2.0000 m3 利用matlab 求解方程得: m = -4.9032 3.8065 -2.5161 2.9247 所以 S1(x)=-0.8172*(-2-x)^3+ 0.6344*(x+3)^3+2.8172*(-2-x)-0.6344*(x+3) x ∈[-3,-2] S2(x)=0.2115*(1-x)^3 -0.1398*(x+2)^3- 1.9032*(1-x)+ 2.2581*(x+2) x ∈[-2,1] S3(x)=-0.1398*(4-x)^3+0.1625(x-1)^3+ 2.2581*(4-x)-1.1290*(x-1) x ∈[1,4] 化简后得:S1(x)=1.4516*x^3 + 10.6128*x^2 + 23.4836*x + 16.1288 x ∈[-3,-2] S2(x)=-0.3513x^3-0.2043x^2+1.8492x+1.7061 x ∈[-2,1] S3(x)=0.3023x^3-2.1651x^2+3.8108x+1.0517 x ∈[1,4] 画图验证:
lagrange插值分段线性插值matlab代码
Lagrange插值: x=0:3; y=[-5,-6,-1,16]; n=length(x); syms q; for k=1:n fenmu=1; p=1; for j=1:n if(j~=k) fenmu=fenmu*(x(k)-x(j)) p=conv(p,poly(x(j))) end end c(k,:)=p*y(k)/fenmu end a=zeros(1,n); for i=1:n for j=1:n a(i)=a(i)+c(j,i) end end 输出结果: fenmu = -1 p = 1 -1 fenmu = 2 p = 1 -3 2 fenmu = -6 p = 1 -6 11 -6 c = 0.8333 -5.0000 9.1667 -5.0000 fenmu = 1 p = 1 0 fenmu =
-1 p = 1 - 2 0 fenmu = 2 p = 1 -5 6 0 c = 0.8333 -5.0000 9.1667 -5.0000 -3.0000 15.0000 -18.0000 0 fenmu = 2 p = 1 0 fenmu = 2 p = 1 -1 0 fenmu = -2 p = 1 -4 3 0 c = 0.8333 -5.0000 9.1667 -5.0000 -3.0000 15.0000 -18.0000 0 0.5000 -2.0000 1.5000 0 fenmu = 3 p = 1 0 fenmu = 6 p = 1 -1 0 fenmu = 6 p = 1 -3 2 0 c = 0.8333 -5.0000 9.1667 -5.0000 -3.0000 15.0000 -18.0000 0 0.5000 -2.0000 1.5000 0 2.6667 -8.0000 5.3333 0 a =
实验5 双线性插值
实验五图像的空间变换 一、实验目的 1、学习图像空间变换,并通过实验体会空间变换的效果,对其作出分析。 2、掌握利用最邻近插值和双线性插值算法(灰度插值)实现图像的缩放。 3、掌握MATLAB编程环境中基本的图像处理函数。 二、实验要求 1.读入图像,对其利用最邻近插值和双线性插值法进行缩放变换,要求先使用IPT函数进行变换,然后自己编写函数实现; 2.对比上述得到的结果。 三、实验原理 图像的空间变换,也称几何变换或几何运算,包括图像的平移、旋转、镜像变换、转置、缩放等。几何运算可改变图像中各物体之间的空间关系,这种运算可以看成是将各物体在图像内移动。 空间变换可如下表示:设(u,v)为源图像上的点,(x,y)为目标图像上的点,则空间变换就是将源图像上(u,v)处的像素值与目标图像上(x,y)处的像素值对应起来,并具有以下关系: x=X(u,v),y=Y(u,v) (即由(u,v)计算对应(x,y))(1.1) 或u=U(x,y),v=V(x,y) (即由(x,y)计算对应(u,v))(1.2) 其中X(u,v)、Y(u,v)、U(x,y)、V(x,y)均为变换。由(1.1)对应的变换称作向前映射法也叫像素移交法,而由(1.2)对应的变换称作向后映射法也叫像素填充法,向后映射法是向前映射法的逆。 最简单的插值算法是最邻近插值,也称为零阶插值。最邻近插值算法简单,在许多情况
下都能得到令人满意的结果,但是当图像中包含像素之间灰度级有变化的细微结构时,最邻近算法会在图像中产生人为加工的痕迹。双线性插值算法计算量比零阶插值大,但缩放后图像质量高,不会出现像素值不连续的的情况,这样就可以获得一个令人满意的结果。最邻近点插值取插值点的4个邻点中距离最近的邻点灰度值作为该点的灰度值。设插值点(i,j)到周边4个邻点fk(i,j)(k =1,2,3,4)的距离为dk(k =1,2,3,4),则:g(i,j)=fk(i,j),dl =min{d1,d2,d3,d4},l=1,2,3,4 。 双线性插值是利用了需要处理的原始图像像素点周围的四个像素点的相关性,通过双线插值算法计算得出的。对于一个目的坐标,通过后映射法得到其在原始图像的对应的浮点坐标(i+u,j+v),其中i,j均为非负整数,u,v为[0,l]区间的浮点数,则这个像素的值f(i+u,j+v)可由原图像中坐标为(i,j)、(i+l,j)、(i,j+1)、(i+1,j+1)所对应的周围四个像素的值决定,即:f(i+u,j+v)=(1-u)×(1-v)×f(i,j)+(1-u)×v×f(i,j+1)+u×(1-v)×f(i+l,j)+u×v×f(i+l,j+1),其中f(i,j)表示源图像(i,j)处的的像素值,以此类推,这就是双线性内插值法。 如下图所示,已知(0,0)、(0,1)、(1,0)、(1,1)四点的的灰度,可以由相邻像素的灰度值f(0,0)和f(1,0)在X方向上线性插值求出(x,0)的灰度f(x,0),由另外两个相邻像素f(0,1)和f(1,1)在X方向上线性插值可求出(x,1)的灰度f(x,1),最后由f(x,0),f(x,1)在Y 方向上进行线性插值就可以得到(x,y)的灰度f(x,y)。 四、实验代码
运用matlab建立三次样条插值函数
(1)编写三条样条插值函数程序如下: x=[1 4 9 16 25 36 49 64 81]; y=[1 2 3 4 5 6 7 8 9]; n=length(x); lamda(1)=1; miu(n)=1; h=diff(x); df=diff(y)./diff(x); d(1)=6*(df(1)-1/2)/h(1); d(n)=6*(0.5*81^-0.5-df(n-1))/h(n-1); for j=2:n-1 lamda(j)=h(j)/(h(j-1)+h(j)); miu(j)=h(j-1)/(h(j-1)+h(j)); d(j)=6*(df(j)-df(j-1))/(h(j-1)+h(j)); end miu=miu(2:end); u=diag(miu,-1);r=diag(lamda,1);a=diag(2*ones(1,n)); A=u+r+a; %求出矩阵形式的线性方程组 M=inv(A)*d'; %求出M值 syms g for j=1:n-1 s(j)=M(j)*(x(j+1)-g)^3/(6*h(j))+M(j+1)*((g-x(j))^3/(6*h(j)))+(y(j)-M( j)*h(j)^2/6)*(x(j+1)-g)/h(j)+(y(j+1)-M(j+1)*h(j)^2/6)*(g-x(j))/h(j); end format rat for j=1:n-1 S(j,:)=sym2poly(s(j)); %三条样条插值函数 end %生成三次样条插值函数图象 for j=1:n-1 x1=x(j):0.01:x(j+1); y1=polyval(S(j,:),x1); plot(x1,y1,x,y,'o'); title('spline 三次样条插值函数图象'); xlabel('x'); ylabel('y'); grid on; hold on; end
插值算法与matlab代码
Matlab中插值函数汇总和使用说明 MATLAB中的插值函数为interp1,其调用格式为: yi= interp1(x,y,xi,'method') 其中x,y为插值点,yi为在被插值点xi处的插值结果;x,y为向量,'method'表示采用的插值方法,MA TLAB提供的插值方法有几种:'method'是最邻近插值,'linear'线性插值;'spline'三次样条插值;'cubic'立方插值.缺省时表示线性插值 注意:所有的插值方法都要求x是单调的,并且xi不能够超过x的范围。 例如:在一天24小时内,从零点开始每间隔2小时测得的环境温度数据分别为12,9,9,10,18 ,24,28,27,25,20,18,15,13, 推测中午12点(即13点)时的温度. x=0:2:24; y=[12 9 9 10 18 24 28 27 25 20 18 15 13]; a=13; y1=interp1(x,y,a,'spline') 结果为:27.8725 若要得到一天24小时的温度曲线,则: xi=0:1/3600:24; yi=interp1(x,y,xi, 'spline'); plot(x,y,'o' ,xi,yi) 命令1 interp1 功能一维数据插值(表格查找)。该命令对数据点之间计算内插值。它找出一元函数f(x)在中间点的数值。其中函数f(x)由所给数据决定。 x:原始数据点 Y:原始数据点
xi:插值点 Yi:插值点 格式 (1)yi = interp1(x,Y,xi) 返回插值向量yi,每一元素对应于参量xi,同时由向量x 与Y 的内插值决定。参量x 指定数据Y 的点。 若Y 为一矩阵,则按Y 的每列计算。yi 是阶数为length(xi)*size(Y,2)的输出矩阵。 (2)yi = interp1(Y,xi) 假定x=1:N,其中N 为向量Y 的长度,或者为矩阵Y 的行数。 (3)yi = interp1(x,Y,xi,method) 用指定的算法计算插值: ’nearest’:最近邻点插值,直接完成计算; ’linear’:线性插值(缺省方式),直接完成计算; ’spline’:三次样条函数插值。对于该方法,命令interp1 调用函数spline、ppval、mkpp、umkpp。这些命令生成一系列用于分段多项式操作的函数。命令spline 用它们执行三次样条函数插值; ’pchip’:分段三次Hermite 插值。对于该方法,命令interp1 调用函数pchip,用于对向量x 与y 执行分段三次内插值。该方法保留单调性与数据的外形; ’cubic’:与’pchip’操作相同; ’v5cubic’:在MATLAB 5.0 中的三次插值。 对于超出x 范围的xi 的分量,使用方法’nearest’、’linear’、’v5cubic’的插值算法,相应地将返回NaN。对其他的方法,interp1 将对超出的分量执行外插值算法。 (4)yi = interp1(x,Y,xi,method,'extrap') 对于超出x 范围的xi 中的分量将执行特殊的外插值法extrap。 (5)yi = interp1(x,Y,xi,method,extrapval) 确定超出x 范围的xi 中的分量的外插值extrapval,其值通常取NaN 或0。 例1 1. 2.>>x = 0:10; y = x.*sin(x); 3.>>xx = 0:.25:10; yy = interp1(x,y,xx); 4.>>plot(x,y,'kd',xx,yy) 复制代码 例2 1. 2.>> year = 1900:10:2010; 3.>> product = [75.995 91.972 105.711 123.203 131.669 150.697 179.323 203.212 226.505 4.249.633 256.344 267.893 ]; 5.>>p1995 = interp1(year,product,1995) 6.>>x = 1900:1:2010; 7.>>y = interp1(year,product,x,'pchip'); 8.>>plot(year,product,'o',x,y) 复制代码 插值结果为: 1.
MATLAB三次样条插值之三弯矩法
MATLAB三次样条插值之三弯矩法 首先说这个程序并不完善,为了实现通用(1,2,…,n)格式解题,以及为调用追赶法程序,没有针对节点数在三个以下的情况进行分类讨论。希望能有朋友给出更好的方法。 首先,通过函数 sanwanj得到方程的系数矩阵,即追赶法方程的四个向量参数,接下来调用 追赶法(在intersanwj函数中),得到三次样条分段函数系数因子,然后进行多项式合并得 到分段函数的解析式,程序最后部分通过判断输入值的区间自动选择对应的分段函数并计算改 点的值。附:追赶法程序 chase %%%%%%%%%%%%%% function [newv,w,newu,newd]=sanwj(x,y,x0,y0,y1a,y1b) % 三弯矩样条插值 % 将插值点分两次输入,x0 y0 单独输入 % 边值条件a的二阶导数 y1a 和b的二阶导数 y1b,这里建议将y1a和y1b换成y2a和 y2b,以便于和三转角代码相区别 n=length(x);m=length(y); if m~=n error('x or y 输入有误,再来'); end v=ones(n-1,1);u=ones(n-1,1);d=zeros(n-1,1); w=2*ones(n+1); h0=x(1)-x0; h=zeros(n-1,1); for k=1:n-1 h(k)=x(k+1)-x(k); end v(1)=h0/(h0+h(1)); u(1)=1-v(1); d(1)=6*((y(2)-y(1))/h(1)-(y(1)-y0)/h0)/(h0+h(1)); % for k=2:n-1 v(k)=h(k-1)/(h(k-1)+h(k)); u(k)=1-v(k); d(k)=6*((y(k+1)-y(k))/h(k)-(y(k)-y(k-1))/h(k-1))/(h(k-1)+h(k)); end newv=[v;1]; newu=[1;u]; d0=6*((y(1)-y0)/h0-y1a)/h0;
matlab旋转+双线性插值
自己写的Matlab旋转+双线性插值图像函数效果图: 源码: clear all; I = imread('original.jpg');
[Height,Width,RGB] = size(I); II = I;%当角度为0时直接输出 %本程序是以左上角为坐标原点 %angle_j是旋转角度,正值是按顺时针旋转,负值时按逆时针旋转 angle_j = 181; %angle是弧度 angle = 2*pi*angle_j/360; %将angle转成正值 while(angle < 0) angle = 2 * pi + angle; end %约束在0-2π内 while(angle > 2 * pi) angle = angle - 2 * pi; end %tag是判断下面的while循环有没有执行过 tag = 0; while(angle > 0) %超过90度的旋转,都先旋转90度,直到角度在0°-90°之间 %原理是旋转90度整数倍时,信息是不丢失的 if angle >= pi/2 a = pi/2; angle = angle - pi/2; elseif0 < angle < pi/2 a = angle; angle = 0; end if tag == 0 tag = 1; else I = II; [Height,Width,RGB] = size(I);%在旋转后的图像上继续旋转,从而实现大于90° 的旋转 end %正向变换用 sina = sin(a); cosa = cos(a); %逆向变换用_m == _minus sina_m = sin(-a); cosa_m = cos(-a); %旋转后图像的长度和宽度 II_height = round(sina * Width + cosa * Height); II_width = round(sina * Height + cosa * Width); II = ones(II_height,II_width,3); %先转成unit8。或者下面赋值0-1规划一下。否则imshow全是白色。 II = im2uint8(II); %%%%%%%%%%%%%%%%%%%%正向映射%%%%%%%%%%%%%%%%%%%%%%%%
拉格朗日插值matlab程序
拉格朗日插值的调用函数 function y=lagrange(x0,y0,x) n=length(x0);m=length(x); for i=1:m z=x(i); L=0.0; for j=1:n T=1.0; for k=1:n if k~=j T=T*(z-x0(k))/(x0(j)-x0(k)); end end L=T*y0(j)+L; end y(i)=L; end 四个图在一起: x=[-1:0.05:1]; y=1./(1+25*x.^2); x0=[-1:0.4:1]; y0=1./(1+25*x0.^2); y1=lagrange(x0,y0,x); x0=[-1:0.2:1]; y0=1./(1+25*x0.^2); y2=lagrange(x0,y0,x); x0=[-1:0.1:1]; y0=1./(1+25*x0.^2); y3= lagrange(x0,y0,x); plot(x,y,'-r') hold on plot(x,y1,'-b',x,y2,'-r',x,y3,'-r')
l5和fx在一起: x=[-1:0.05:1]; y=1./(1+25*x.^2); x0=[-1:0.4:1]; y0=1./(1+25*x0.^2); y1=lagrange(x0,y0,x); plot(x,y,'-r') hold on plot(x,y1,'-b') l10和fx在一起: x=[-1:0.05:1]; y=1./(1+25*x.^2); x0=[-1:0.2:1]; y0=1./(1+25*x0.^2); y2= lagrange(x0,y0,x); plot(x,y,'-r') hold on plot(x,y2,'-b') l20和fx在一起: x=[-1:0.05:1]; y=1./(1+25*x.^2); x0=[-1:0.1:1]; y0=1./(1+25*x0.^2); y3= lagrange(x0,y0,x); plot(x,y,'-r') hold on plot(x,y3,'-b')
三次样条插值的MATLAB实现
MATLAB 程序设计期中考查 在许多问题中,通常根据实验、观测或经验得到的函数表或离散点上的信息,去研究分析函数的有关特性。其中插值法是一种最基本的方法,以下给出最基本的插值问题——三次样条插值的基本提法: 对插值区间[]b a ,进行划分:b x x x a n ≤
三次样条插值的Matlab实现(自然边界和第一边界条件)
(第一边界条件)源代码:function y=yt1(x0,y0,f_0,f_n,x)_____________(1) %第一类边界条件下三次样条插值; %xi所求点; %yi所求点函数值; %x已知插值点; %y已知插值点函数值; %f_0左端点一次导数值; %f_n右端点一次导数值; n = length(x0); z = length(y0); h = zeros(n-1,1); k=zeros(n-2,1); l=zeros(n-2,1); S=2*eye(n); fori=1:n-1 h(i)= x0(i+1)-x0(i); end fori=1:n-2 k(i)= h(i+1)/(h(i+1)+h(i)); l(i)= 1-k(i);
end %对于第一种边界条件: k = [1;k];_______________________(2) l = [l;1];_______________________(3) %构建系数矩阵S: fori = 1:n-1 S(i,i+1) = k(i); S(i+1,i) = l(i); end %建立均差表: F=zeros(n-1,2); fori = 1:n-1 F(i,1) = (y0(i+1)-y0(i))/(x0(i+1)-x0(i)); end D = zeros(n-2,1); fori = 1:n-2 F(i,2) = (F(i+1,1)-F(i,1))/(x0(i+2)-x0(i)); D(i,1) = 6 * F(i,2); end %构建函数D: d0 = 6*(F(1,2)-f_0)/h(1);___________(4)
数字图像处理(Matlab复习代码)
双线性插值法 I_=imread('test.jpg'); I=rgb2gray(I_); A=0.7;B=0.7;%失真像素坐标 [i,j]=size(I); m=round(i*A);n=round(j*B); temp=zeros(m,n);%产生m*n矩阵 G=[A0;0B]; for x=1:m for y=1:n ab=[x,y]/G;%取得x/A,y/B a=ab(1)-floor(ab(1));%权值 b=ab(2)-floor(ab(2)); %防溢出处理 if ab(1)<1 ab(1)=1; end if ab(1)>i ab(1)=i; end if ab(2)<1 ab(2)=1; end if ab(2)>j ab(2)=j; end %定义内插值坐标 ab11=[floor(ab(1))floor(ab(2))]; ab12=[floor(ab(1))ceil(ab(2))]; ab21=[ceil(ab(1))floor(ab(2))]; ab22=[ceil(ab(1))ceil(ab(2))]; temp(x,y)=(1-a)*(1-b)*I(ab11(1),ab11(2))+... a*(1-b)*I(ab12(1),ab12(2))+... (1-a)*b*I(ab21(1),ab21(2))+... a*b*I(ab22(1),ab22(2)); end end imshow(uint8(temp)),title('0.7倍双线性');最近邻法 I_=imread('test.jpg');%读入原始图像 I1=rgb2gray(I_); [i,j]=size(I1); m=round(i*1.5);n=round(j*1.5); m_=round(i*0.7);n_=round(j*0.7); %1.5倍最邻近 TEMP=zeros(m,n);%产生m*n矩阵 for i=1:m for j=1:n TEMP(i,j)=I1(round(i/1.5),round(j/1.5)); end end subplot(1,3,1),imshow(I1),title('原图') TEMP1_5=uint8(TEMP); subplot(1,3,2), imshow(TEMP1_5),title('1.5倍最邻近') 全局预测下的图像分割 I_=imread('test.jpg'); I=rgb2gray(I_); [m,n]=size(I); %统计直方图 zhifangtu=zeros(1,255);% for i=1:1:m for j=1:1:n zhifangtu(I(i,j)+1)= zhifangtu(I(i,j)+1)+1; end end plot(zhifangtu); %阈值处理 final=zeros(m,n); for x=1:1:m for y=1:1:n AA=I(x,y); if AA>120 final(x,y)=255; else final(x,y)=0; end end end imshow(uint8(final));
matlab插值法,迭代法程序
数值分析作业 姓名王建忠 学号132080202006 学院能源与动力工程 专业机械电子工程 2013年12月16日
https://www.360docs.net/doc/2612307934.html,grange插值多项式程序 function f=nalagr(x,y,xx) %x为节点向量 %y为节点函数值 %xx是插值点 syms s if(length(x)==length(y)) n=length(x); else disp('x和y的维数不相等!'); return; end f=0.0; for(i=1:n) l=y(i); for(j=1:i-1) l=l*(s-x(j))/(x(i)-x(j)); end; for(j=i+1:n) l=l*(s-x(j))/(x(i)-x(j));%计算拉格朗日基函数end; f=f+l;%计算拉格朗日插值函数 simplify(f); if(i==n) if(nargin==3) f=subs(f,'s');%计算插值点的函数值else f=collect(f);%将插值多项式展开 f=vpa(f,6);%将插值多项式的系数化成6位精度的小数 end end end >>x=[-2,-1,0,1];%已知节点向量y=[3,1,1,6];%节点函数值向量 f=nalagr(x,y) f= 0.5*s^3+ 2.5*s^2+ 2.0*s+ 1.0 >>f=nalagr(x,y,0) f=1 >>
2.牛顿插值多项式程序 function[p2,z]=newTon(x,y,t) %输入参数中x,y为元素个数相等的向量,t为待估计的点,可以为数字或向量。%输出参数中p2为所求得的牛顿插值多项式,z为利用多项式所得的t的函数值。 n=length(x); chaS(1)=y(1); for i=2:n x1=x;y1=y; x1(i+1:n)=[]; y1(i+1:n)=[]; n1=length(x1); s1=0; for j=1:n1 t1=1; for k=1:n1 if k==j continue; else t1=t1*(x1(j)-x1(k)); end end s1=s1+y1(j)/t1; end chaS(i)=s1; end b(1,:)=[zeros(1,n-1)chaS(1)]; cl=cell(1,n-1); for i=2:n u1=1; for j=1:i-1 u1=conv(u1,[1-x(j)]); cl{i-1}=u1; end cl{i-1}=chaS(i)*cl{i-1}; b(i,:)=[zeros(1,n-i),cl{i-1}]; end p2=b(1,:); for j=2:n p2=p2+b(j,:); end if length(t)==1 rm=0;
matlab计算拉格朗日牛顿及分段线性插值的程序
《工程常用算法》综合实践作业二 完成日期: 2013年 4月 14 日 班级 学号 姓名 主要工作说明 自评成绩 0718 2010071826 崔洪亮 算式与程序的编写 18 0718 2010071815 侯闰上 流程图的编辑,程序的审查 0718 2010071809 赵化川 报告的整理汇总 一.作业题目:三次样条插值与分段插值 已知飞机下轮廓线数据如下: x 3 5 7 9 11 12 13 14 15 y 0 1.2 1.7 2.0 2.1 2.0 1.8 1.2 1.0 1.6 飞机下轮廓线形状大致如下图所示: 要求分别用拉格朗日插值法、Newton 插值法、分段线性插值法和三次样条插值法计算x 每改变0.5时y 的值,即x 取 0.5, 1, 1.5, … , 14.5 时对应的y 值。比较采用不同方法的计算工作量、计算结果和优缺点。 二.程序流程图及图形 1.拉格朗日插值法 开始 x,y,x0 Length (x)==l Ength (y)? n=length (x) i=1:n,l=1。 j=1:i-1&j=i+1:n l=l.*(x0-x(j)/x(i)-x(j) f=f+l*y(i) 结束 否 是 机翼 下轮廓线
2.牛顿插值法 开始 x,y,xi Length(x)==l ength(y)? n=length(x)Y=zeros (n),Y (:1)=y,f=0 a=1:n-1,b=1:n-a,Y(b,a+1)=(Y (b+1,a)-Y(b,a))/(x (b+a)-x(b)) i=1:n,z=1 结束 j=1:i-1,z=z.*(xi-x(j)) f=f+Y(1,i)*z 否 是 3.分段线性插值法 开始 x ,y ,x0 length (x )==length(y)? k=1:n-1 x(k)<=x0&x0《=x(k+1) temp=x(k)-x(k+1) f=(x0-x(k+1))/temp*y(k)+(x0-x(k))/(-temp)*y(k+1) 结束 否否 是 是 三.matlab 程序及简要的注释(m 文件) 1.拉格朗日插值法 2.牛顿插值法 function f=newdun(x,y,xi) %x 为已知数据点的x 坐标向量 %y 为已知数据点的y 坐标向量 function f=lang(x,y,x0) %x 为已知数据点的x 坐标向量 %y 为已知数据点的y 坐标向量
双线性插值
双线性插值,又称为双线性内插。在数学上,双线性插值是有两个变量的插值函数的线性插值扩展,其核心思想是在两个方向分别进行一次线性插值。例如已知的红色数据点与待插值得到的绿色点如图1所示: 图1 假如我们想得到未知函数在点的值,假设我们已知函数 在, , , 及四个点的值。首先在 x 方向进行线性插值,得到 然后在 y 方向进行线性插值,得到 这样就得到所要的结果, 如果选择一个坐标系统使得的四个已知点坐标分别为(0, 0)、(0, 1)、(1, 0) 和(1, 1),那么插值公式就可以化简为
或者用矩阵运算表示为 这就是双线性内插值法。双线性内插值法计算量大,但缩放后图像质量高,不会出现像素值 不连续的的情况。由于双线性插值具有低通滤波器的性质,使高频分量受损,所以可能会使 图像轮廓在一定程度上变得模糊。 双线性插值法的MATLAB源代码为: I=imread('lena.jpg'); %读入原图像 [nrows,ncols,z]=size(I); %读取图像矩阵大小,方便后面操作 K = str2double(inputdlg('please input scale factor (must between 0.2 - 5.0)', 'INPUT scale factor', 1, {'0.5'})); width = K * nrows; height = K * ncols; J = uint8(zeros(width,height,z)); widthScale = nrows/width; heightScale = ncols/height; for x = 5:width - 5 % 5是为了防止矩阵超出边界溢出 for y = 5:height - 5 for z=1:3 xx = x * widthScale; % xx, yy为原坐标,x,y为新坐标 yy = y * heightScale; if((xx/double(uint16(xx))==1.0)&&(yy/double(uint16(yy))==1.0)) J(x,y,z) = I(int16(xx),int16(yy),z); %若xx,yy为整数,直接赋值 else a = double(uint16(xx)); b = double(uint16(yy)); x11 = double(I(a,b,z)); % x11 <- I(a,b) x12 = double(I(a,b+1,z)); % x12 <- I(a,b+1) x21 = double(I(a+1,b,z)); % x21 <- I(a+1,b) x22 = double(I(a+1,b+1,z));% x22 <- I(a+1,b+1) J(x,y,z) = uint8((b+1-yy)*((xx-a)*x21+(a+1-xx)*x11)+(yy-b)* ((xx-a)*x22+(a+1-xx)*x12)); %用双线性插值计算公式计算 end end end end
MATLAB三次样条插值之三转角法
非常类似前面的三弯矩法,这里的sanzhj函数和intersanzhj作用相当于前面的sanwanj和intersanwj,追赶法程序通用,代码如下。 %%%%%%%%%%%%%%%%%%% function [newu,w,newv,d]=sanzhj(x,y,x0,y0,y1a,y1b) % 三转角样条插值 % 将插值点分两次输入,x0 y0 单独输入 % 边值条件a的一阶导数 y1a 和b的一阶导数 y1b n=length(x);m=length(y); if m~=n error('x or y 输入有误,再来'); end v=ones(n-1,1); u=ones(n-1,1); d=zeros(n-1,1); w=2*ones(n-1,1); h0=x(1)-x0; h=zeros(n-1,1); for k=1:n-1 h(k)=x(k+1)-x(k); end v(1)=h0/(h0+h(1)); u(1)=1-v(1); d(1)=3*(v(1)*(y(2)-y(1))/h(1)+u(1)*((y(1)-y0))/h0); % for k=2:n-1 v(k)=h(k-1)/(h(k-1)+h(k)); u(k)=1-v(k); d(k)=3*(v(k)*(y(k+1)-y(k))/h(k)+u(k)*(y(k)-y(k-1))/h(k-1)); end d(1)=d(1)-u(1)*y1a; d(n-1)=d(n-1)-v(n-1)*y1b; newv=v(1:n-2,:); newu=u(2:n-1,:); %%%%%%%%%%%% function intersanzhj(x,y,x0,y0,y1a,y1b) % 三转角样条插值
matlab旋转实现(最近邻值,双线性,三次卷积插值实现插值)
对图像进行旋转,使用最近邻插值法,双线性插值,三次卷积插值三种方法进行插值。 源码: clc;clear all;close all; Img=imread('test1.bmp'); Img=double(Img); [h w]=size(Img); alpha=pi/6; %逆时针旋转的角度 wnew=w*cos(alpha)+h*sin(alpha); %新图像的宽width hnew=w*sin(alpha)+h*cos(alpha); %新图像的高heighth wnew=ceil(wnew); %取整 hnew=ceil(hnew); u0=w*sin(alpha); %平移量 T=[cos(alpha),sin(alpha);-sin(alpha),cos(alpha)]; %变换矩阵 Imgnew1=zeros(hnew,wnew); Imgnew2=zeros(hnew,wnew); Imgnew3=zeros(hnew,wnew); for u=1:hnew %u和v是新图像坐标,变换到原图像坐标x和y中。 for v=1:wnew
tem=T*([u;v]-[u0;0]); x=tem(1); y=tem(2); if x>=1 & x<=h & y>=1 & y<=w %若变换出的x和y在原图像范围内 x_low=floor(x); x_up=ceil(x); y_low=floor(y); y_up=ceil(y); if (x-x_low)<=(x_up-x) %采用最近点法,选取距离最近点的像素赋给新图像x=x_low; else x=x_up; end if (y-y_low)<=(y_up-y) y=y_low; else y=y_up; end p1=Img(x_low,y_low); %双线性插值,p1到p4是(x,y)周围的四个点p2=Img(x_up,y_low); p3=Img(x_low,y_low); p4=Img(x_up,y_up); s=x-x_low; t=y-y_low; Imgnew1(u,v)=Img(x,y); Imgnew2(u,v)=(1-s)*(1-t)*p1+(1-s)*t*p3+(1-t)*s*p2+s*t*p4; end if x>=2 & x<=h-2 & y>=2 & y<=w-2 %若变换出的x和y在原图像范围内x_1=floor(x)-1; x_2=floor(x); x_3=floor(x)+1; x_4=floor(x)+2; y_1=floor(y)-1; y_2=floor(y); y_3=floor(y)+1; y_4=floor(y)+2; A=[sw(1+x-x_2),sw(x-x_2),sw(1-(x-x_2)),sw(2-(x-x_2))]; C=[sw(1+y-y_2),sw(y-y_2),sw(1-(y-y_2)),sw(2-(y-y_2))]; B=[ Img(x_1,y_1),Img(x_1,y_2),Img(x_1,y_3),Img(x_1,y_4); Img(x_2,y_1),Img(x_2,y_2),Img(x_2,y_3),Img(x_2,y_4); Img(x_3,y_1),Img(x_3,y_2),Img(x_3,y_3),Img(x_3,y_4); Img(x_4,y_1),Img(x_4,y_2),Img(x_4,y_3),Img(x_4,y_4)]; Imgnew3(u,v)=A*B*C'; end