带你玩转12款Linux开源机器人

带你玩转12款Linux开源机器人
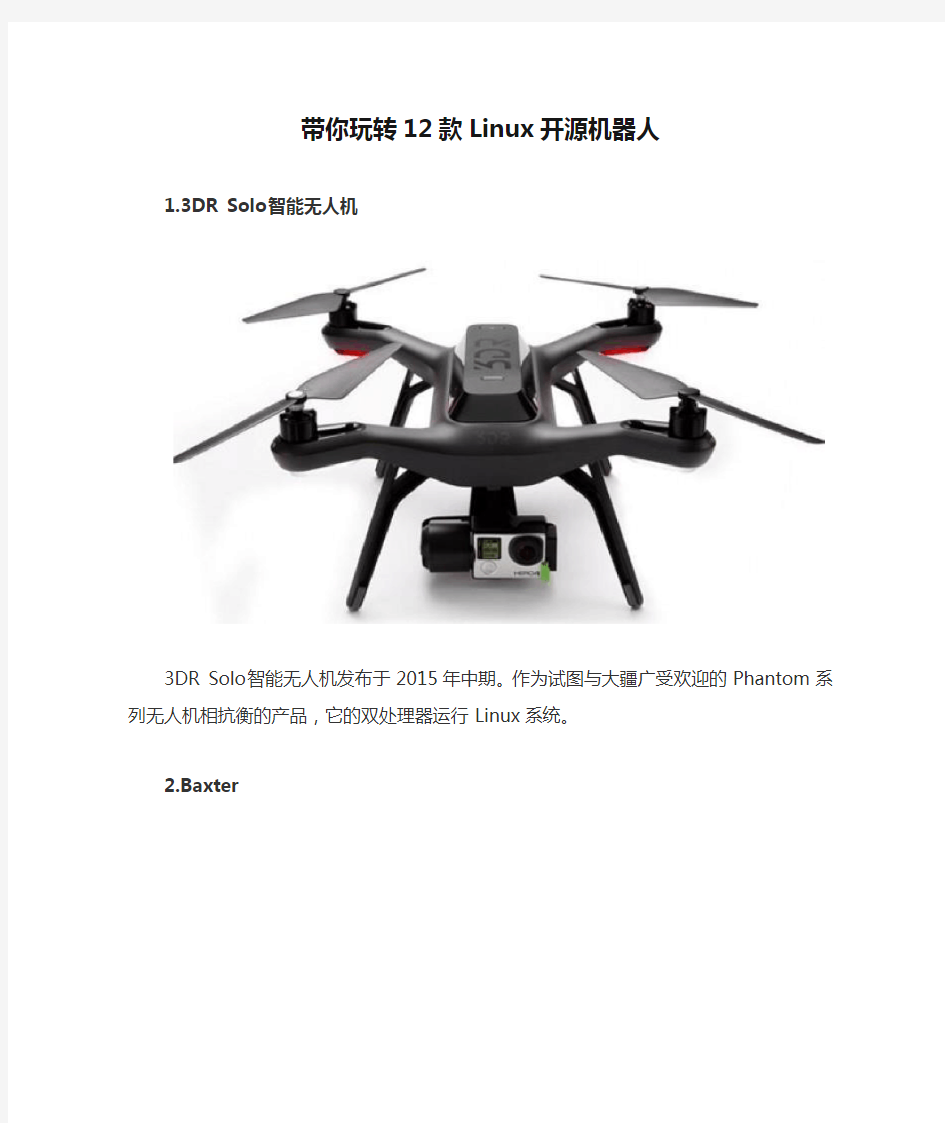
1.3DR Solo智能无人机
3DR Solo智能无人机发布于2015年中期。作为试图与大疆广受欢迎的Phantom系列无人机相抗衡的产品,它的双处理器运行Linux系统。
2.Baxter
Rethink Robotics推出的Baxter是一款很可爱的协作机器人,它的出现降低了工厂自动化的门槛。它运行ROS和Linux操作系统。得益于先进的路径规划技术和新一代力传感器,Baxter可与人类一同工作,并避免了伤害人类的风险。
3.BeagleBone Blue
BeagleBone Blue是围绕BeagleBone开源硬件平台打造的开发板,在机器人设计上具有教育意义,而且价格亲民。
4.Erle Spider
Erle Spider也来自Erle Robotics,是一款外形如同蜘蛛一般的无人机,完全以ROS开源平台为基础,搭载Ubuntu系统。功能齐全的Linux电脑包含一些内置传感器,拥有数个I/O接口,可通过WiFi、蓝牙甚至3G和4G网络来控制以及编程。
5.Erle Plane
Erle Robotics出品的Erle Plane是一款固定翼无人机,它搭载的机器人系统以Linux为基础。
6.Mindstorms EV3
乐高的Mindstorms EV3拼装机器人运行Linux操作系统,允许玩家尽情打造各种有意思的酷炫机器人。
7.JACO RE
Kinova生产的JACO RE是一款六自由度仿生机械臂,可绕轴无限制地旋转,机械臂的手掌带三个手指,每个手指均可单独控制。它可安装到轮椅上,帮助行动不便的人士。支持Ubuntu Linux操作系统。
8.Relay
加州初创公司Savioke的Relay是一款酒店客服机器人,它可通过WiFi来控制电梯升降,不过它的主要功能是运送点心、洗漱用品等物品。
9.RoboRIO控制器
美国国家仪器公司为参加FIRST机器人大赛的学生打造了RoboRIO控制器。它采用Real-Time Linux系统以及LabVIEW可重配置I/O架构和工具包。
10.Starship
Starship是一款六轮机器人,它能沿着人行道行进,携带相当于两个购物袋的物品,同时又能避免与行人相撞。
11.NAO互动机器人
Aldebaran的NAO互动机器人外形招人喜欢,可以进行个性化设置,并用于执行各种不同的任务。这款定制机器人备受市场青睐,目前销量已经超过7000个。
12.UBR-1机器人
Unbounded Robotics设计的UBR-1机器人运行Linux和ROS,它拥有一个七自由度的手臂,手掌可处理协同工作。UBR-1可自由移动,能在制造车间中灵活移动同时避免撞到障碍物。
【编辑推荐】
1.开源与创业需要注意的关键点有哪些
2.2016年值得关注的最佳Linux发行版排行榜
3.十大开源安卓应用程序的开发框架
4.如何借助CrossOver在Linux上运行Windows程序
5.不止是SteamOS,盘点那些为游戏而生的Linux发行版
利用开源硬件设计抓取机器人
利用开源硬件设计抓取机器人 发表时间:2019-03-26T15:53:46.253Z 来源:《基层建设》2018年第35期作者:陈奇1 陆必云2 [导读] 摘要:抓取机器人在工业生产中成为替代人们开展复杂和危险作业的工具,它能完成简单的传递物料工作,提高生产质量,保证了产品的效率。 1江阴市富仁电力设备安装有限公司;2江阴兴澄特种钢铁有限公司摘要:抓取机器人在工业生产中成为替代人们开展复杂和危险作业的工具,它能完成简单的传递物料工作,提高生产质量,保证了产品的效率。本文就对抓取机器人的组装和工作原理作详细的描述,本文抓取机器人是基于Arduino平台的设计的,近年来开源硬件Arduino设计平台开发了大量消防机器人、智能家电等一些产品。 关键字:抓取机器人;Arduino;开源硬件 1 前言 Arduino是一款非常便捷开发板,并且是开放源程序代码和电路图的电子开发板。硬件使用的是Arduino Uno板,编译程序的软件是Arduino IDE,由意大利和西班牙的设计师首先提出。Arduino的设计主要包含两各部分:硬件部分电路主要使用的是Arduino板,软件编辑Arduino IDE,是由计算机提供。 Arduino的功能强大的原由是因为它可以通过传感器来感知环境,可以有温感,光感,湿感等一些传感器的所测数据来反馈到Arduino板上。通过这些反馈的数据板子就会根据你所需要和设置的数据来执行下一步设计的动作,控制器可以根据你所书写的程序数据来设置,以二进制文件编译,烧写进进微控制器。Arduino的编程是以Arduino的编程语言和电脑中的开发环境所提供的。总而言之,Arduino的使用难度相比单片机程序的设计降低了太多,程序简单易懂,也没有PLC那么高昂的价格,充分满足我们的试验需求和经济能力。 2 抓取机器人总体方案 2.1抓取机器人功能 六舵机自由度抓取机器人,能简单的模仿人手臂的一些动作。做一些简单的动作演示,它的动力由六个伺服舵机组成,可以实现抓取机器人的前后上下及左右抓取搬运的演示。具体动作解析如下,用手部(舵机一)抓持工作的部件,手腕(舵机二)用来旋转调整手部和被抓物体距离的调整,肘部(舵机三,四,五,)用来抬起物品,为下一步的移动做出铺垫,肩部(舵机六)用来移动物。动作覆盖地域要全面,在一定的范围能没有死角。动作指令可更改性,可以根据工作的需要,随时改变动作。程序简单化,不需要有太多程序指令,这样很不容易掌握,出现故障难以排除,动作指令不好更改。经济实用性,价格不能太贵,不管以后工作还是实验,成本节约一般都是首要条件。需要有多种控制方法,不能控制方法单一,出现困难的控制环境难以改变便,比如工作在室内,电脑就可以控制,不需要远程控制,可是在复杂的工作环境,人不可以长时间滞留的工作环境,这时候就需要改变控制方式,用远程来控制。 2.2控制模块和舵机 自由度抓取机器人的控制模块相当于电脑的主机,它是抓取机器人的核心关键,我们选用硬件体积小、价格便宜的Arduino。 本设计的抓取机器人需要用到六个舵机,本次设计不需要非常的高灵敏度和举起物品的重量,所以选择四个MG996型号的模拟舵机和两个DS3115型号的数字舵机,这样搭配着使用,既能可以相对提高抓取机器人的灵敏度,也可以降低价格成本,做上下左右的移动物品的动作。 2.3总体方案设计 控制模块选用简单易懂的Arduino模块和32路舵机控制板,这样既方便抓取机器人的制作,还方便对程序的理解。硬件模块选择DS3115和Mg996两款铁质材料的舵机,抓取机器人的机身,选择铁破质机身,这样方便后期的展示和制作。根据构思好的结构图制作硬件电路, 3 抓取机器人硬件设计 3.1 Arduino开发板 本项目选用Arduino UNO开发板,Arduino的核心芯片是AVR指令集的单片机(ATmega328)。Arduino的控制器最好的地方就是开放源程序代码和原始的电路设计,可以修改,也可以下载。可以电脑直接usb供电也可外部供应电源。支持在线烧写程序,可以直接通过USB更新程序。 3.2JOYSTICK手柄 手柄是我们本项目中必不可少的实现设备,它可以无线异地接收,不过仅限距离内控制抓取机器人。确保在危险施工现场人们可以不到现场并有目的的运用抓取机器人工作,确保工作人员的安全和提供必要的工作效率。手柄的使用和控制系统之间必须建立通信功能,在和控制系统实现通讯之前,必须要先通过Arduino和电脑之间实现通讯调试。因为本设计实现通讯的地方比较多,0、1通讯口下面要和32路舵机控制板实现通讯,所以这里不用这两个通讯口,Arduino的通讯口还有11、12、13、14,为了设计更好的进行定义了13、14口为通讯口,Arduino和手柄的通讯口对反连接,因为两个通讯之间的通讯是一个发送,另一个接收,所以通讯口要对反连接。 3.3舵机控制板 舵机控制板,它有32个通道。舵机控制板接线柱一和接线柱三为舵机供电控制(4-7V),接线柱二为控制部分供电(7-12V),主芯片为单片机,单片机上端的四个插口是通讯口(TXD、RXD、GND、VCC),驱动分辨率为1us/秒,0.09度/秒。本设计通讯的波特率为9600。舵机控制板主要负责给舵机脉宽让舵机转动,以及与Arduino之间互相通讯来给舵机脉宽和选择通道来使多个舵机达到控制的目的。 实现32路舵机控制板的控制,需要和本设计的核心控件相连,两块板子上都有通讯口,需要对反相接,信号的传递是相互的,一个发送一个接收,32路舵机控制板的驱动电源为5V,这个电源刚好可以由Arduino来提供,节省试验资源。 3.4抓取机器人系统 抓取机器人的信号发送系统为JOYSTICK手柄, Arduino为控制系统,主要是负责接收JOYSTICK手柄发送过来的信息,来处理相应的数据,在根据这些数据作出反应,舵机控制板则是等Arduuino的信息,收到Arduino的信息后根据Arduino的给的数据选择通道给舵机信号,让舵机自此转动,因为舵机里有电位器,只要舵机里的电机一但转动,电机的轴就会带动电位器的轴转动,这样电位器的阻值就会改变,根据变化的阻值,就可以知道舵机是否转动到指定的位置。 4 总结
《中文Linux应用编程界面(API)规范》
《中文Linux应用编程界面(API)规范》 编制说明 一、任务来源 根据国家863计划信息技术领域,软件重大专项,中文Linux和办公软件相关标准与规范课题研究开发任务的规定,和根据国家质检总局和信息产业部2003年放国家标准和行业标准制、修订计划安排,制订《中文Linux应用编程界面(API)规范》。该项目由中软网络技术股份有限公司负责起草,项目计划代号为 二、工作过程 在国家任务下达后,中软网络技术股份有限公司就组织了工作组,在前期工作的基础上,收集与翻译了国际上有关Linux的主要标准的最新版本LSB 1.3(目前的最新版本为 LSB 2.0)和OpenI13N 1.3。总结了多年来在Linux开发工作和标准制订工作的经验。在“非典”肆虐期间,编写了制订《中文Linux应用编程界面(API)规范》的计划和大纲。 在“四所”的组织下成立了“中文Linux标准”工作组。在工作组的统一安排下,确定了编写工作的计划与大纲。于2003年9月初,编写了《中文Linux 应用编程界面(API)规范》初稿,提交工作组讨论。工作组前后经过了近10次讨论,几经修改,先后提交了三次修改稿,才形成了《征求意见稿》。《征求意见稿》通过在网上和有关单位广泛征求意见,收集了许多很好的意见。工作组又组织了有FSG和OpenI18N有关人员和国内的Linux厂商、专家及有关人员参加的“Linux标准研讨会”。 2004年4月信息产业部成立Linux标准工作组,组织更大范围的企业参与标准的制定工作。在此基础上工作组对“意见汇众”进行了深入的整理、分析和讨论,确定了修改意见。根据这些意见,经过修改,我们提交了《中文Linux 应用编程界面(API)规范》的《送审稿》。 2006年在发展基金及国家十五项目的支持下,中国电子技术标准化研究所组织国内主要Linux操作系统发布商,对标准的符合性测试展开研究,并根据测试研究的结果对标准做中描述不够严谨的地方做出相应调整。 三、主要说明 1、标准的目的
常用linux命令(面试常用)
date显示系统日期 cd.. 返回上级目录 pwd 显示当前路径 ls 查看目录中的文件 ls -F 查看目录中的文件 ls -l 显示文件和目录的详细资料 ls -a显示隐藏文件 ls -lh 显示权限 tree 显示文件和目录由根目录开始的树形结构 shutdown -h now 关闭系统 mkdir dir1 创建目录 rm -f file1 删除文件 rmdir 删除目录 cp 复制文件 find /-name file1 从/开始进入根文件系统搜索文件和目录 groupadd group_name 创建一个新用户组 groupdel group_name 删除一个用户组 useradd user1 创建一个新用户 userdel -r user1 删除一个用户 passwd 修改口令 passwd user1 修改一个用户的口令 gunzip file1.gz 解压一个file1.gz的文件 gzip file1 压缩文件 cat file1 从第一个字节开始查看文件 grep Aug /log/massages 在 massage文件中查找关键字Aug grep ^Aug /log/massages 在 massage文件中查找以Aug开头的词汇df 查看磁盘空间占用情况,使用权是所有用户 free 查看内存的使用情况 quota 显示磁盘使用情况和限制情况,使用权是超级用户 lp 打印文件 ifconfig 查看和更改网络接口的地址和参数 ping检测主机网络接口状态,使用权限是所有用户 Telnet 远程登录 ftp 文件传输 more一页一页显示档案内容 who 查看目前谁在线 finger 查看关于系统用户的信息 clear 清除屏幕
2018泰雅普积木式开源机器人
2018泰雅普积木式开源机器人 “室内导航挑战赛”竞赛规则/计分表 一、竞赛任务 比赛中,机器人从起点出发,完成倒车入库的任务后找到事先放置在圆形任务区的魔方,将魔方运送到正方形任务区的魔方放置点,之后小车回到到达区。 二、竞赛细则 1、比赛时间和计分方法 每个选手有两轮比赛机会,单轮比赛时间为2分钟。单轮的比赛分=完成任务的分数+时间加成分数。竞赛成绩统计时,取两轮的最好成绩为最终比赛成绩。 2、选手/队伍顺序 单轮比赛中,上一个选手开始比赛时,会通知下一个选手上场准备。在规定时间内(裁判通知后的1分钟内)没有准备好的机器人的队伍将丧失本轮比赛机会,但不影响另一轮的比赛。 3、赛前搭建与调试 参赛队伍机器人可预先搭建和编程,比赛前一天有2小时编程调试时间。每轮比赛开始前,机器人由裁判封存,参赛队员未经允许不得再接触机器人,否则将被取消参赛资格。 4、场地 比赛场地采用彩色写真布,有效尺寸1800mm*1100mm。 从场地上的起点区域出发,各个任务区之间无任何轨迹线引导。 下图是场地图形(该图仅供2017年泰雅普积木式机器人室内导航挑战赛示例参考用,实际场地以泰雅普官方提供或购买为准):
图1.竞赛场地示意图 5、机器人规格和材料标准 (1)尺寸:机器人在起点区的最大尺寸为25cm×20cm×15cm(长×宽×高),离开出发区后,机器人的机构可以自行伸展,但必需确保通过终点区时的尺寸不大于25cm×20cm×15cm(长×宽×高)。 (2)控制器:每台机器人只允许使用一个控制器 (3)电机:机器人使用的直流电机或舵机数量不超过4个(包含4个)。 (4)传感器:机器人禁止使用带危险性传感器,如激光类传感器。相同类型的传感器数量不超过3个(包含3个)。 (5)电源:每台机器人电源类型不限,但电源输出电压不能超过10V。 三、竞赛任务 1、竞赛任务设置 小学组和中学组任务相同。 2、竞赛中每轮比赛终止说明 (1)机器人到达终点区域,该轮比赛结束; (2)竞赛中机器人脱离场地约束区,该轮比赛结束;
linux常用命令
新手刚刚接触Linux的时候可能处处感到不便,不过没有关系,接触新的事物都有这样的一个过程,在你用过Linux一段时间后,你就会逐渐了解Linux其实和Windows一样容易掌握。 由于操作和使用环境的陌生,如果要完全熟悉Linux的应用我们首先要解决的问题就是对Linux常用命令的熟练掌握。本章我们就来介绍Linux的常用基本命令。 Linux常用命令 1.Linux命令基础 Linux区分大小写。在命令行(shell)中,可以使用TAB键来自动补全命令。即可以输入命令的前几个字母,然后按TAB键,系统自动补全命令,若不止一个,则显示出所有和输入字母相匹配的命令。 按TAB键时,如果系统只找到一个和输入相匹配的目录或文件,则自动补全;若没有匹配的内容或有多个相匹配的名字,系统将发出警鸣声,再按一下TAB键将列出所有相匹配的内容(如果有的话)以供用户选择。 首先启动Linux。启动完毕后需要进行用户的登录,选择登陆的用户不同自然权限也不一样,其中―系统管理员‖拥有最高权限。 在启动Linux后屏幕出现如下界面显示:Red Hat Linux release 9 (Shrike) Kernel 2.4.20.8 on an i686
login: 输入:root(管理员名)后,计算机显示输口令(password:),输入你的口令即可。当计算机出现一个―#‖提示符时,表明你登录成功! 屏幕显示Linux提示符:[root@localhost root]#_ 这里需要说明的是―Red Hat Linux release 9 (Shrike)‖表示当前使用的操作系统的名称及版本。―2.4.20.8‖表示Linux操作系统的核心版本编号。―i686‖表示该台电脑使用的CPU的等级。 下面我们来介绍常用基本命令 一,注销,关机,重启 注销系统的logout命令 1,Logout 注销是登陆的相对操作,登陆系统后,若要离开系统,用户只要直接下达logout命令即可: [root@localhost root]#logout
Linux基础及应用习题解析
1、Linux是所谓的“Free Software”,这个“Free”的含义是什么?() A、Linux不需要付费 B、Linux发行商不能向用户收费 C、Linux可自由修改和发布 D、只有Linux的作者才能向用户收费 2、Linux系统各组成部分中哪一项是基础?() A、内核 B、X Window C、Shell D、GONME 3、Linux内核管理系统不包括的子系统是哪个?()还包括设备管理系统 A、进程管理系统 B、内存管理系统 C、文件管理系统 D、硬件管理系统 4、下面关于Shell的说法,不正确的是哪个?() A、操作系统的外壳 B、用户与Linux内核之间的接口 C、一种和C类似的高级程序设计语言 D、一个命令语言解释器 5、以下哪种Shell类型在Linux环境下不能使用?() A、B Shell B、K Shell C、R Shell D、Bash 6、安装Linux至少需要几个分区?() A、2 B、3l C、4 D、5 7、RHEL Server 5系统启动时默认由以下哪个系统引导程序实施系统加载?() A、GRUB B、LILOl C、KDE D、GNOME 8、/dev/hda5 在Linux中表示什么?() A、IDE0接口上从盘 B、IDE0接口上主盘的逻辑分区 C、IDE0接口上主盘的第五个分区 D、IDE0接口上从盘的扩展分区 9、系统引导的过程一般包括如下几步:(1)MBR中的引导装载程序启动;(2)用户登录;(3)Linux内核运行;(4)BIOS自检。以下哪个顺序是正确的?()A、(4) (2) (3) (1) B、(4) (1) (3) (2) C、(2) (4) (3) (1) D、(1) (4) (3) (2) 10、KDE中要调整桌面墙纸及字体需要打开哪个组件?() A、文件管理器 B、我的电脑 C、控制中心 D、屏幕保护程序 11、Linux有几个虚拟终端?() A 、5 B、6 C、7 D、8 12、输入命令的时候,选项和参数之间可以用什么符号隔开?() A、% B、! C、空格 D、~ 13、pwd命令的功能是什么?() A、设置用户的口令 B、显示用户的口令 C、显示当前目录的绝对路径 D、查看当前目录的文件 14、输入“cd”命令并按【Enter】键后,将有什么结果?() A、从当前目录切换到根目录 B、屏幕显示当前目录 C、从当前目录切换到用户主目录 D、从当前目录切换为上一级目录
LINUX常用数据结构
/* * List definitions. */ #define LIST_HEAD(name, type) \ struct name { \ struct type *lh_first; /* first element */ \ } #define LIST_ENTRY(type) \ struct { \ struct type *le_next; /* next element */ \ struct type **le_prev; /* address of previous next element */ \ } /* * List functions. */ #define LIST_INIT(head) { \ (head)->lh_first = NULL; \ } #define LIST_INSERT_AFTER(listelm, elm, field) { \ if (((elm)->field.le_next = (listelm)->field.le_next) != NULL) \ (listelm)->field.le_next->field.le_prev = \ &(elm)->field.le_next; \ (listelm)->field.le_next = (elm); \ (elm)->field.le_prev = &(listelm)->field.le_next; \ } #define LIST_INSERT_HEAD(head, elm, field) { \ if (((elm)->field.le_next = (head)->lh_first) != NULL) \
机器人系统常用仿真软件介绍
1 主要介绍以下七种仿真平台(侧重移动机器人仿真而非机械臂等工业机器人仿真): 1.1 USARSim-Unified System for Automation and Robot Simulation USARSim是一个基于虚拟竞技场引擎设计高保真多机器人环境仿真平台。主要针对地面机器人,可以被用于研究和教学,除此之外,USARSim是RoboCup救援虚拟机器人竞赛和虚拟制造自动化竞赛的基础平台。使用开放动力学引擎ODE(Open Dynamics Engine),支持三维的渲染和物理模拟,较高可配置性和可扩展性,与Player兼容,采用分层控制系统,开放接口结构模拟功能和工具框架模块。机器人控制可以通过虚拟脚本编程或网络连接使用UDP协议实现。被广泛应用于机器人仿真、训练军队新兵、消防及搜寻和营救任务的研究。机器人和环境可以通过第三方软件进行生成。软件遵循免费GPL条款,多平台支持可以安装并运行在Linux、Windows和MacOS操作系统上。 1.2 Simbad Simbad是基于Java3D的用于科研和教育目的多机器人仿真平台。主要专注于研究人员和编程人员热衷的多机器人系统中人工智能、机器学习和更多通用的人工智能算法一些简单的基本问题。它拥有可编程机器人控制器,可定制环境和自定义配置传感器模块等功能,采用3D虚拟传感技术,支持单或多机器人仿真,提供神经网络和进化算法等工具箱。软件开发容易,开源,基于GNU协议,不支持物理计算,可以运行在任何支持包含Java3D库的Java客户端系统上。 1.3 Webots Webots是一个具备建模、编程和仿真移动机器人开发平台,主要用于地面机器人仿真。用户可以在一个共享的环境中设计多种复杂的异构机器人,可以自定义环境大小,环境中所有物体的属性包括形状、颜色、文字、质量、功能等也都可由用户来进行自由配置,它使用ODE检测物体碰撞和模拟刚性结构的动力学特性,可以精确的模拟物体速度、惯性和摩擦力等物理属性。每个机器人可以装配大量可供选择的仿真传感器和驱动器,机器人的控制器可以通过内部集成化开发环境或者第三方开发环境进行编程,控制器程序可以用C,C++等编写,机器人每个行为都可以在真实世界中测试。支持大量机器人模型如khepera、pioneer2、aibo等,也可以导入自己定义的机器人。全球有超过750个高校和研究中心使用该仿真软件,但需要付费,支持各主流操作系统包括Linux, Windows和MacOS。 1.4 MRDS-Microsoft Robotics Developer Studio MRDS是微软开发的一款基于Windows环境、网络化、基于服务框架结构的机器人控制仿真平台,使用PhysX物理引擎,是目前保真度最高的仿真引擎之一,主要针对学术、爱好者和商业开发,支持大量的机器人软硬件。MRDS是基于实时并发协调同步CCR(Concurrency and Coordination Runtime)和分布式软件服务DSS(Decentralized Software Services),进行异步并行任务管理并允许多种服务协调管理获得复杂的行为,提供可视化编程语言(VPL)和可视化仿真环境(VSE)。支持主流的商业机器人,主要编程语言为C#,非商业应用免费,但只支持在Windows操作系统下进行开发。 1.5 PSG-Player/Stage/Gazebo
第1节 认识机器人
第1节认识机器人 【教学目标】 1.知识与技能目标 (1)初步认识机器人,了解机器人的定义和基本构成。 (2)理解机械传动的基本知识。 (3)掌握机器人的发展及应用,讨论未来人与机器人的关系。 2.过程与方法 通过相关图片、视频,帮助学生理解和开阔视野并展望未来;通过讨论,引导学生结合实际生活,感受现代机器人的广泛应用及与人类的辩证关系;类比人类,通过小组自学探究,帮助学生掌握机器人的基本构成。 3.情感态度与价值观 感受机器人给我们的生活、学习带来的影响和价值;辩证地认识机器人技术的应用价值,增强社会责任感。 【教学重点】 机器人的基本构成以及广泛应用。 【教学难点】 辨识机器人以及理解齿轮传动这种机械传动方式。 【教学方法】讲演法、任务驱动下的自学探究法、小组讨论法 【课时安排】1课时
计算机控制和可编程,所以不是机器人,例如,一般的遥控玩具汽车可以通过遥控手柄控制运动,但由于没有计算机控制和编程,所以无法完成“走迷宫”等活动。 4、讨论 围绕我国科学家对机器人的定义及机器人定义三要素,观察身边的世界,想一想,你认为哪些机器可以称为机器人,为什么? (二)机器人的基本构成 1、类比(人类处理信息的过程) 2、自学探究,回答问题: (1)常见的传感器种类有哪些? (2)什么是“单片机”? (3)“单片机”的优点及在生活中的广泛应用? (4)机器人机械传动的主要方式有哪些?(5)“齿轮传动”中,“加速装置”和“减速装置”的区别主要在哪里? (6)将齿数为10的齿轮与齿数为30的齿轮分别搭建成2个装置,转动手柄时,会发生什么现象?填写下表: (三)机器人的发展方向 师:随着机器人技术的发展,人们开发了各式各样的具有感知、决策、行动和交互能力的机器人。 1、机器人分类 (我国,从应用环境出发) 工业机器人 特种机器人 2、举例 外骨骼机器人;达芬奇手术机器人;(图文资料)Atlas机器人;无人驾驶汽车。(播放相关视频) (四)教学机器人 1、师:了解了这么多有关机器人的知识,相信,很多同学都对机器人学习产生了浓厚的兴趣,那么,对于我们来说,如何学习机器人知识才是较为便捷有效的呢? ——教学机器人
基于开源软件Ardusub的水下机器人ROV控制系统
基于开源软件Ardusub的水下机器人ROV控制系统 摘要:随着海洋资源开发以及水下领域作业任务的增加,水下机器人在水下作 业中发挥着越来越重要的作用。ROV作为水下作业的重要工具,对运动控制算法 要求较高,采用开源软件ArduSub,结合一种模糊串级PID控制算法实现ROV控 制系统的设计,重点对ArduSub的特点、适应配置及PID控制算法原理,包含运 动和姿态方面进行了阐述,能够良好实现ROV的水下控制。 1引言 随着海洋资源开发以及水下领域作业任务的增加,水下机器人在水下作业中 发挥着越来越重要的作用。其中ROV续航持久,成本相对较低,逐渐成为水下作 业的重要工具。ROV工作于水下环境,具有非线性、易受环境影响等特点,对运 动控制算法要求较高,同时要求整个控制系统要有较好的实时性和可靠性。 2开源软件ArduSub简介 ArduSub水下机器人的控制器是一个完整的开源解决方案,提供远程操作控 制(通过智能潜水模式)和全自动的执行任务。作为DroneCode软件平台的一部分,它能够无缝地使用地面控制站的软件,可以监控车辆遥测和执行强大的任务规划 活动。它还受益于DroneCode平台的其他部分,包括模拟器,日志分析工具,为 车辆管理和控制和更高层次的api。 其主要特点在于以下几个方面: 反馈控制和稳定性:ArduSub控制器基于多旋翼自动驾驶系统,具有精确的 反馈控制,可主动维持方向。 深度保持:使用基于压力的深度传感器,ArduSub控制器可以将深度保持在 几厘米内。 航向保持:默认情况下,ArduSub在未命令转动时自动保持其航向。 相机倾斜:通过操纵杆或游戏手柄控制器与伺服或万向节电机进行相机倾斜 控制。 灯光控制:通过操纵杆或游戏手柄控制器控制海底照明。 无需编程:ArduSub控制器适用于各种ROV配置,无需任何自定义编程。大 多数参数可以通过地面控制站轻松更改。 兼容性好:ArduSub兼容许多不同的ROV框架,支持PWM输出。 由于以上特征,使得ArduSub成为一款可以很好适用于水下机器人RPV控制 系统的开源软件。 ArduSub兼容基于串行和以太网的通信接口。使用的硬件自动驾驶仪必须支 持选择的选项。Pixhawk仅支持串行连接,但可以通过配套计算机连接到以太网。其他autopilots原生支持以太网。ArduSub软件主要用于通过ArduSub进行接口,ArduSub是一种开源的跨平台用户界面,适用于所有类型的无人机。该接口通过 系绳连接到ArduSub控制器并显示车辆状态信息,并允许更新参数和设置。最重 要的是,QGC与用于指挥车辆的操纵杆或游戏手柄控制器连接。 ArduSub包含一个高级的电机库,支持多个框架,例如具有6自由度推进器 定位的BlueROV配置(图1所示)、带有并排垂直推进器的矢量ROV(图2所示)、采用单垂直推进器的ROV(图3所示)等等。 在传感器和执行器方面,除了标准的板载传感器(IMU,指南针),ArduSub
怎样执行在Linux上运行应用程序
如何执行在Linux上运行的应用程序 关键字:Linux 先决条件 要充分理解本文,必须具备Windows 环境下桌面应用程序的工作经验,我认为读者对如何使用Linux 桌面有一个基本的了解。使用一个运行的Linux 计算来机探讨本文的概念和示例是很有帮助的。 概述 有时候第一次在Linux 上运行一个应用程序需要一点额外工作。有些应用程序,比如服务器服务,可能无法安装为服务,因此您需要从命令行启动这些应用程序。对于启动这些应用程序的用户帐户而言,需要在应用程序文件中设置执行许可标志(x)。 运行用户空间应用程序 Linux 在内核空间或用户空间运行进程。用户空间是操作系统的区域,应用程序通常在此运行。简单地说,每个用户帐户有其自己的用户空间,应用程序在这个领域内运行。 默认情况下,只有root 用户有权访问内核空间。root 用户是Linux 中的超级用户,相当于Windows 中的管理员帐户。在root 用户帐户下运行应用程序可能会引起安全风险,是不可取的。 很多服务器服务需要root 权限启动服务。然而,服务启动后,root 帐户通常会将其移至服务帐户。严格地说,Linux 中的服务帐户才是标准的用户帐户。主要区别是服务帐户仅用于运行一个服务,而不是为任何实际登录的用户准备的。 设置权限 您可以使用chmod 命令在一个文件中设置执行权限。在Linux 中,umask 设置通常用来防止下载的文件被执行,也有充分的理由相信,因为它有助于维护Linux 计算机的安全性。 大多数Linux 发行版具有一个值为022 的umask 设置,这意味着,默认情况下一个新文件权限设置为644.权限的数字表示形式采用读(4)、写(2)、执行(1) 的格式。因此,默认权限为644 的应用程序下载意味着文件所有者有读写权限,而组用户和其他用户只有读权限。 例如,为每个人赋予一个文件的执行权限,使用chmod a+x 命令。a 表示所有人,加号(+) 表示添加,而x 表示执行。同样地,如果应用程序是一个服务器服务,您应该确保只有授权帐户才有权执行此服务。 如果一个应用程序能够在标准用户帐户权限下运行,但只有特定组中的用户才需要使用它,您可以将该组所有者权限设置为可执行,然后将这些用户添加到该组中。 更具体地说,您可以在一个可执行文件中设置访问控制列表(ACL) 权限,赋予特定用户或组权限来运行该应用程序。使用setfacl 实用工具设置ACL 权限。 对于这些需要以root 用户启动进程的应用程序,比如服务器服务,您有几个选择。总结了允许用户执行需要root 权限的服务器服务的各种选项。 选项描述 作为root 用户不推荐用于服务器服务。当用户已经知道root 密码而且应用程序泄露不是首要关注问题时,可用于应用程序。 SetUID 由于安全问题,不推荐使用。SetUID 允许标准用户以另一个用户方式,比如root 用户,执行一个文件。 sudo 很常用,并且被认为是一个很好的实践。sudo 授予一个用户或组成员权限以执行可能额外需要root 权限的文件。该用户不需要知道root 密码。 带有文件权限的标准用户帐户在一个文件上为用户所有者、组所有者或其他人(所有人)
《Linux应用程序设计》复习题
.一、选择题 1.下面哪个命令是用来定义shell的全局变量( ) A. exportfs B. alias C. exports D. export 2. 将当前目录下的文件移动到目录/home/linux下的命令为。 A. cp /home/linux B. mv /home/linux C. lls / home/linux/ D. mv /root/ /home/linux/ 3.如果要列出一个目录下的所有文件需要使用命令行( )。 A. ls –l B. ls-t C. ls –a D. ls –d 下Makefile文件中,表示第一个依赖目标的系统变量是() A.$@ B.$* C.$< D.$# 位系统下,定义一个指向字符类型的变量short i,那么sizeof(i)的值是( ) B.2 6.在用ls –l 查看文件属性时,字符设备文件类型的标志是( ) 7. 在linux下进行shell编程时,注释符是。 A. # B. /* */ D. 以上都不对 8. 任何时候用户需要回到用户主目录时可以使用命令。 A. cd B. pwd C. path D. cd . 9. 下列属于文件包含的命令是_________。 A. #define N 25 B. #endif C. #include "" D. #else 10. 下列关于Linux安装的说法中,不正确的是。 A.如果计算机的内存为128MB,则SWAP分区(交换分区)的大小通常设定为256M。 B.安装时Linux分区的文件系统类型一般为ext2或ext3。
C.安装时要进行磁盘分区,如果选择“自动分区”,系统会自动保留硬盘上原来的数据。 除了可以从光盘安装外,还可以从网上下载Linux的iso映像文件,从硬盘安装。 11. 下列说法中,不正确的是。 A. Shell程序编写完后还需要用gcc编译器编译。 B.可以通过将shell程序作为sh命令的输入来执行shell程序。 C. shell程序中定义的函数不能有参数。 D. Linux是免费使用和自由传播的类UNIX操作系统,但它并不是没有版权。 二.判断题 init 启动进程需要读取的系统配置文件是/etc/inittab。(√) 下令某个进程在后台运行,可在此命令后面加符号&。( √) 3.如果route add default gw netmask 命令成功运行的话,此机器的IP地址有可能是。 (X ) 程序编写完后还需要用gcc编译器编译。(X ) 5.计算机内存中正数的补码和原码一样,负数的补码等于其原码加1(X ) 6.在RedHat中cd ~ 这个命令会把你送回到你的家目录。(√) 三.填空题 IP协议采用四层层级结构,从下到上分别是:网络接口层.____ 互联网络层______ 、_ ___传输层______ .和应用层。 2.使用GCC 生成可执行文件似乎是一步完成的,实际上经历了如下四个步骤:__预处理____.编译.汇编和__连接______。 3.一个C语言程序的执行起点是__主函数________。
linux常用命令大全
& &命令可用在其他任何命令的后面,它用来通知计算机在后台运行某一命令。通过把作业放在后台,用户可以继续使用当前的shell来处理其他命令;如果命令在前台运行的话,那么用户在此进程结束前不能继续使用当前的shell。 adduser adduser命令由root或其他具有权限的管理员用来创建新用户,跟在adduser命令后面的是所要创建的帐号名,例如:adduser flying alias alias命令用来设置命令的别名或替代名。一般说来别名往往是实际命令名的缩写。例如用户为ls设置一个别名dir: alias dir=ls 若仅输入alias本身时,系统将显示当前所有的别名。 bg bg命令用来迫使被挂起的进程在后台运行。例如,当你已经在前台启动了一个命令时(没有在此命令后使用&),你才想到这一命令将运行较长一段时间,但你这时还需使用shell。在这种情况下,可通过ctrl+z挂起当前运行的进程。此时你既可以使它长期挂起,也可以通过输入bg把这一进程放到后台运行。这样shell就可以用来执行其他的命令了。 cat cat通常是用来在屏幕上滚动显示文件的内容。它的格式是: cat〈filename〉 cd cd用来改变目录。这一命令非常有用,它有三种典型的使用方法。 cd移到目录树的上一层 cd~移动到用户的主目录,与单独使用cd相同 cd directory name改变到指定的目录 cp cp用来拷贝对象。例如要把file1拷贝到file2,用如下命令: cp file1 file2 dd dd命令用来转换文件格式。 fg fg命令用来激活某个被挂起的进程并使它在前台运行。当有一个进程正在运行时,由于某种原因需要挂起它,在执行完其他任务后,需要重新把这一进程调到前台运行,这时便可用bg命令使这一进程继续运行。 find find命令用来查找指定目录的文件。当找到后将按照用户的要求对文件进行处理。语法是: find以它为起点进行搜索的目录想要查找的文件名或元字符对文件执行的操作 grep grep命令用来在指定的对象中搜索指定的文本。语法是:grep〈text〉〈file〉。它还可以和其他命令的结果联合使用,例如: ps -ef|grep-v root 这一命令要求grep接受ps命令的输出,并除去所有包含单词root的进程(-v的含义是显示与文本不匹配的内容)。在不使用-v选项时,这一命令将显示进程清单中所有包含单词root的进程。 halt halt命令用来通知内核关闭系统,它是一个只能由超级用户执行的命令。 hostname 既可以用来显示系统当前的主机名或域名,也可用来设置系统的主机名。 login 当向系统注册时,将使用login。login命令也可用来随时从这一用户改变到另一用户。 logout
认识机器人 教学反思
认识机器人教学反思 本课是小学六年级下册第十课的教学内容,在此课的教学中我主要突出以下几个方面: 一、精选教学素材 素材的好坏会直接影响学生的学习兴趣及教学效果,记得在第一次试教中, 为了介绍形态各异,功能不同的机器人,我用静态的图片素材,然后口头加以介 绍说明。通过教学,这种介绍方法学生不仅参与的积极性不高,而且很难不能体 会机器人的主要特征。发现问题后,我将大部分的图片素材,换成了视频素材。 实践证明动态素材不仅可以大大提高课堂效率,而且激发了学生主动参与学习的 兴趣。将无趣的知识教学融入到趣味的素材展示中,学生的心情会变得轻松、愉 快,学习由被动变为主动,由强迫学变为自觉学,进而使注意力变得集中和持久, 观察力变得敏锐,想象力变得丰富,创造思维更加活跃。 二、理论联系实际 在本课的教学中,我十分重视理论联系实际。如:为了引出机器人能按照人 们事先编制的程序工作,我特意安排了“按轨迹搬运机器人”的视频,学生通过自 己的观察,发现了机器人会按照我们事先为它画好的黑线行走、搬物。有了这个 视觉上的感知,学生就可以轻松的理解机器人的这个特征。又如:在得出机器人 的三个特征后,为了加深学生的理解,我特意带了一个机器人,让学生观察,实 践。通过观察,学生体会到机器人有一定的机械结构和外形,并能完成一定的动 作。通过让机器人一下子变凶猛,一下子变温柔的实践,体会了它有自己的大脑, 会按照人们事先编好的程序工作。 三、注重学生的创造能力的培养 未来是属于学生的,未来的机器人也需要学生去发明创造。因此学生创造能 力的培养显得尤为重要。在最后一个环节中,我安排了前后桌的同学一起设计未 来的机器人。在讨论交流中,不仅培养了学生的创新能力,还培养了学生的语言 表达能力。 四、注重知识的扩展 一节课的时间是有限的,而机器人的相关知识有很多,(如:机器人的由来, 除了我介绍的机器人以外还有哪些机器人等等)教师不可能在40分钟能内满足 所有学生对知识的需求。因此课外的扩展显得尤为重要,而在信息技术高速发展 的今天,学生的学习活动可以不受时间和空间的限制,只要有计算机,能在任何 时间任何地点根据需要进行学习。在这种环境下,传统的课堂教学模式所限定的
机器人系统常用仿真软件介绍概要
1 主要介绍以下七种仿真平台 (侧重移动机器人仿真而非机械臂等工业机器人仿真 : 1.1 USARSim-Unified System for Automation and Robot Simulation USARSim 是一个基于虚拟竞技场引擎设计高保真多机器人环境仿真平台。主要针对地面机器人, 可以被用于研究和教学, 除此之外, USARSim 是 RoboCup 救援虚拟机器人竞赛和虚拟制造自动化竞赛的基础平台。使用开放动力学引擎 ODE(Open Dynamics Engine,支持三维的渲染和物理模拟,较高可配置性和可扩展性,与 Player 兼容,采用分层控制系统, 开放接口结构模拟功能和工具框架模块。机器人控制可以通过虚拟脚本编程或网络连接使用 UDP 协议实现。被广泛应用于机器人仿真、训练军队新兵、消防及搜寻和营救任务的研究。机器人和环境可以通过第三方软件进行生成。软件遵循免费 GPL 条款, 多平台支持可以安装并运行在Linux 、 Windows 和 MacOS 操作系统上。 1.2 Simbad Simbad 是基于 Java3D 的用于科研和教育目的多机器人仿真平台。主要专注于研究人员和编程人员热衷的多机器人系统中人工智能、机器学习和更多通用的人工智能算法一些简单的基本问题。它拥有可编程机器人控制器, 可定制环境和自定义配置传感器模块等功能, 采用 3D 虚拟传感技术, 支持单或多机器人仿真,提供神经网络和进化算法等工具箱。软件开发容易,开源,基于 GNU 协议,不支持物理计算,可以运行在任何支持包含 Java3D 库的 Java 客户端系统上。 1.3 Webots Webots 是一个具备建模、编程和仿真移动机器人开发平台, 主要用于地面机器人仿真。用户可以在一个共享的环境中设计多种复杂的异构机器人, 可以自定义环境大小, 环境中所有物体的属性包括形状、颜色、文字、质量、功能等也都可由用户来进行自由配置,它使用 ODE 检测物体碰撞和模拟刚性结构的动力学特性, 可以精确的模拟物体速度、惯性和摩擦力等物理属性。每个机器人可以装配大量可
Linux常用命令详解(配合示例说明,清晰易懂)
Linux常用命令详解 (常用、详细) BISTU 自动化学院 刷碗小工(frisen.imtm) 2010年11月 开源社区,造福大家,版权所有,翻录不究(初次接触Linux命令可能对以下说明有不少疑问,可待看完一遍后再回头细看) (配合Ctrl + F可快速查找你想了解的命令)
索引:(待完善) 文件说明:Linux命令很多,但最常用的80个左右 文档内容充实,用示例说明命令如何使用笔者力求语言简洁,清晰易懂 由于忙于其他事情,改进排版的工作只能搁置了 最后,望此文档能为大家Linux学习之路献微薄之力 一、路径: 执行命令前必须要考虑的一步是命令的路径,若是路径错误或是没有正确的指定,可能导致错误的执行或是找不到该命令。要知道设置的路径,可执行以下命令: 一般而言,本书的命令位于/bin、usr/bin、/sbin、/usr/sbin之中。若读者执行了命令却出现“command not find”或是“命令不存在”的字样,就必须要确定该命令的位置是否在命令的路径中,或是系统上根本没有安装该套件。 二、命令顺序: 若在shell内置的命令/bin以及/usr/bin之下都出现了命令pwd,那当我们执行该命令时,会执行哪一个?答案是第一优先执行shell内置的命令,再执行路径中的设置;因此若有相同名称的命令时,必须要注意顺序设置,或是直接输入完整路径。 三、参数(或称选项)顺序: 一般除了特殊情况,参数是没有顺序的。举例而言,输入“–a –v”与输入“–v –a”以及“–av”的执行效果是相同的。但若该参数后指定了要接的文件或特殊对象,如“–a cmd1 –v cmd2”,则不能任意改变选项顺序。 四、常用参数: 下面所列的是常见的参数(选项)意义: --help,-h 显示帮助信息 --version,-V 显示版本信息 -v 繁琐模式(显示命令完整的执行过程) -i 交谈模式(指定界面) -l 长列表输出格式 -q,-s 安静模式(不显示任何输出或错误信息) -R 递归模式(连同目录下所有文件和子目录一起处理) -z 压缩 五、命令的结合与定向: 命令中除了一般命令外,还有管道(或称途径)(|)与定向(>或>>)。 管道(途径)的用法: “命令一[选项]”| “命令二[选项]”,也就是将“命令一[选项]”的输出结果传到“命令二[选项]”,通过命令二的处理之后才输出到标准输出(屏幕)上。比如“ls /etc”会列出etc下的所有文件,若加上“| less”,也就是“ls /etc | less”,则会将“ls /etc”的结果通过less分页输出。 定向的用法: 将结果定向到命令的输出设备,一般不加文件名意为将结果输出到屏幕,若是在定向后加上文件名,则会将命令的执行结果输出到定向的文件,例如“ls > temp.txt”,就会将ls 的结果输出到文件temp.txt中。“>”与“>>”的差异在于前者是覆盖,而后者是附加。 六、命令中的命令: 许多命令在执行后,会进入该命令的操作模式,如fdisk、pine、top等,进入后我们必须要使用该命令中的命令,才能正确执行;而一般要退出该命令,可以输入exit、q、quit或是按【Ctrl+C】组合