基于单片机AT89S52的直流电机PWM调速控制系统
第一章:前言
1.1 前言:
直流电机的定义:将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。
近年来,随着科技的进步,直流电机得到了越来越广泛的应用,直流具有优良的调速特性,调速平滑,方便,调速范围广,过载能力强,能承受频繁的冲击负载,可实现频繁的无极快速起动、制动和反转,需要满足生产过程自动化系统各种不同的特殊要求,从而对直流电机提出了较高的要求,改变电枢回路电阻调速、改变电压调速等技术已远远不能满足现代科技的要求,这是通过PWM 方式控制直流电机调速的方法就应运而生。
采取传统的调速系统主要有以下的缺陷:模拟电路容易随时间飘移,会产生一些不必要的热损耗,以及对噪声敏感等。而用PWM 技术后,避免上述的缺点,实现了数字式控制模拟信号,可以大幅度减低成本和功耗。并且PWM 调速系统开关频率较高,仅靠电枢电感的滤波作用就可以获得平滑的直流电流,低速特性好;同时,开关频率高,快响应特性好,动态抗干扰能力强,可获很宽的频带;开关元件只需工作在开关状态,主电路损耗小,装置的效率高,具有节约空间、经济好等特点。
随着我国经济和文化事业的发展,在很多场合,都要求有直流电机PWM 调速系统来进行调速,诸如汽车行业中的各种风扇、刮水器、喷水泵、熄火器、反视镜、宾馆中的自动门、自动门锁、自动窗帘、自动给水系统、柔巾机、导弹、火炮、人造卫星、宇宙飞船、舰艇、飞机、坦克、火箭、雷达、战车等场合。
1.2本设计任务:
任务: 单片机为控制核心的直流电机PWM 调速控制系统
设计的主要内容以及技术参数:
功能主要包括:
1) 直流电机的正转;
2) 直流电机的反转;
3) 直流电机的加速;
4) 直流电机的减速;
5) 直流电机的转速在数码管上显示;
6) 直流电机的启动;
7) 直流电机的停止;
第二章:总体设计方案
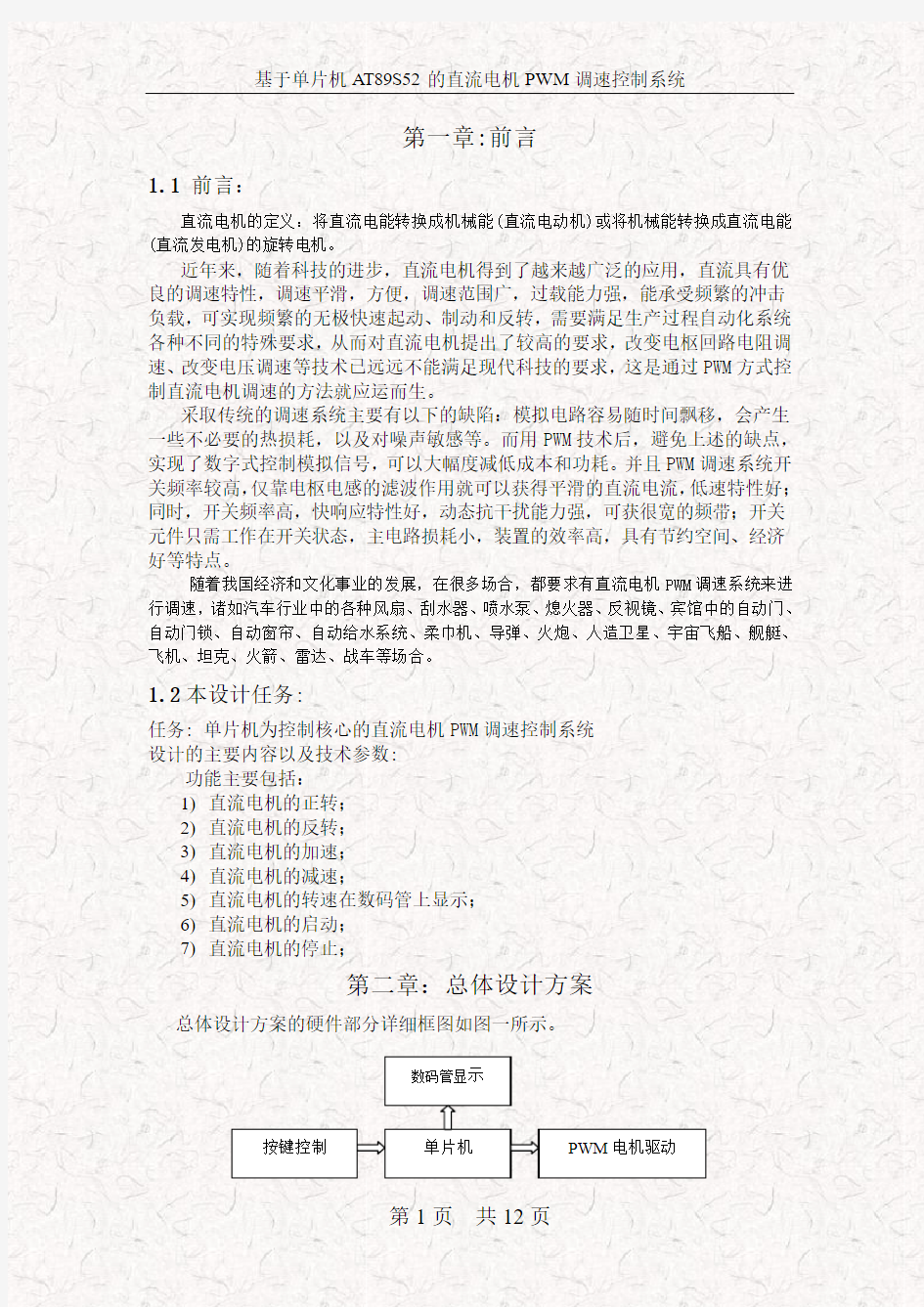
总体设计方案的硬件部分详细框图如图一所示。
单片机 PWM 电机驱动 数码管显示 按键控制
键盘向单片机输入相应控制指令,由单片机通过P1.0与P1.1其中一口输出与转速相应的PWM脉冲,另一口输出低电平,经过信号放大、光耦传递,驱动H型桥式电动机控制电路,实现电动机转向与转速的控制。电动机的运转状态通过数码管显示出来。电动机所处速度级以速度档级数显示。正转时最高位显示“三”,其它三位为电机转速;反转时最高位显示“F”,其它三位为电机转速。每次电动机启动后开始显示,停止时数码管显示出“0000”。
1、系统的硬件电路设计与分析
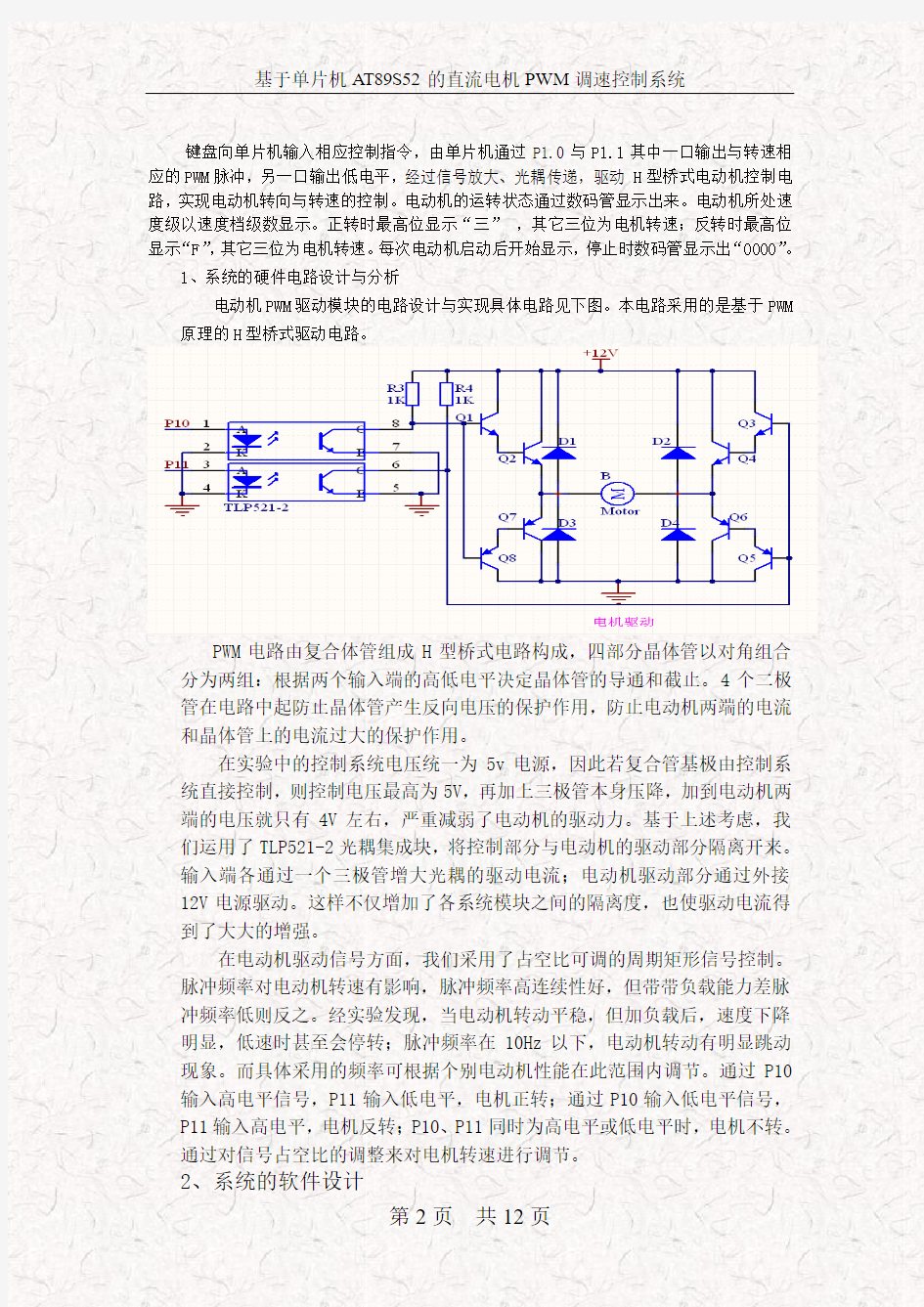
电动机PWM驱动模块的电路设计与实现具体电路见下图。本电路采用的是基于PWM 原理的H型桥式驱动电路。
PWM电路由复合体管组成H型桥式电路构成,四部分晶体管以对角组合分为两组:根据两个输入端的高低电平决定晶体管的导通和截止。4个二极管在电路中起防止晶体管产生反向电压的保护作用,防止电动机两端的电流和晶体管上的电流过大的保护作用。
在实验中的控制系统电压统一为5v电源,因此若复合管基极由控制系统直接控制,则控制电压最高为5V,再加上三极管本身压降,加到电动机两端的电压就只有4V左右,严重减弱了电动机的驱动力。基于上述考虑,我们运用了TLP521-2光耦集成块,将控制部分与电动机的驱动部分隔离开来。
输入端各通过一个三极管增大光耦的驱动电流;电动机驱动部分通过外接12V电源驱动。这样不仅增加了各系统模块之间的隔离度,也使驱动电流得到了大大的增强。
在电动机驱动信号方面,我们采用了占空比可调的周期矩形信号控制。
脉冲频率对电动机转速有影响,脉冲频率高连续性好,但带带负载能力差脉冲频率低则反之。经实验发现,当电动机转动平稳,但加负载后,速度下降明显,低速时甚至会停转;脉冲频率在10Hz以下,电动机转动有明显跳动现象。而具体采用的频率可根据个别电动机性能在此范围内调节。通过P10输入高电平信号,P11输入低电平,电机正转;通过P10输入低电平信号,P11输入高电平,电机反转;P10、P11同时为高电平或低电平时,电机不转。
通过对信号占空比的调整来对电机转速进行调节。
2、系统的软件设计
本系统编程部分工作采用KELI-C51语言完成,采用模块化的设计方法,与各子程序做为实现各部分功能和过程的入口,完成键盘输入、按键识别和功能、PWM脉宽控制和数码管显示等部分的设计。
单片机资源分配如下表:
P0 显示模块接口
键盘中断
P1 键盘模块接口
P1.0/P1.1 PWM电机驱动接口系统时钟
①PWM脉宽控制:本设计中采用软件延时方式对脉冲宽度进行控制,延时程序函数如下:
/*****************延时函数*************************/
delays()
{
uchar i;
for(i=5000;i>0;i--);
}
②键盘中断处理子程序:采用中断方式,按下键,完成延时去抖动、键码识别、按键功能执行。
要实现按住加/减速键不放时恒加或恒减速直到放开停止,就需在判断是否松开该按键时,每进行一次增加/减少一定的占空比。
③显示子程序:利用数组方式定义显示缓存区,缓存区有8位,分别存放各个数码管要显示的值。
④定时中断处理程序:采用定时方式1,因为单片机使用12M晶振,可产生最高约为65.5ms的延时。对定时器置初值B1E0H可定时20ms,即系统时钟精度可达0.02s。当20ms定时时间到,定时器溢出则响应该定时中断处理程序,完成对定时器的再次赋值,并对全局变量time加1,这样,通过变量time可计算出系统的运行时间。
3、软件设计中的特点:
对于电机的启停,在PWM控制上使用渐变的脉宽调整,即开启后由停止匀加速到默认速度,停止则由于当前速度逐渐降至零。这样有利于保护电机。键盘处理上采用中断方式,不必使程序对键盘反复扫描,提高了程序的效率。
第三章:系统硬件电路设计
整体框图如下:
直流电动机开环调速MATLAB系统仿真
东北石油大学 MATLAB电气应用训练 2013年 3 月 8日
MATLAB电气应用训练任务书 课程 MATLAB电气应用训练 题目直流电动机开环调速系统仿真 专业电气信息工程及其自动化姓名赵建学号 110603120121 主要内容: 采用工程设计方法对双闭环直流调速系统进行设计,选择调节器结构,进行参数的计算和校验;给出系统动态结构图,建立起动、抗负载扰动的MATLAB /SIMULINK 仿真模型。分析系统起动的转速和电流的仿真波形,并进行调试,使双闭环直流调速系统趋于合理与完善 基本要求: 1.设计直流电动机开环调速系统 2.运用MATLAB软件进行仿真 3.通过仿真软件得出波形图 参考文献: [1] 陈伯时. 电力拖动自动控制系统—运动控制系统第3版[M]. 北京:机械工业出版社, 2007. [2] 王兆安, 黄俊. 电力电子技术第4版[M]. 北京:机械工业出版社, 2000. [3] 任彦硕. 自动控制原理[M]. 北京:机械工业出版社, 2006. [4] 洪乃刚. 电力电子和电力拖动控制系统的MATLAB仿真[M]. 北京:机械工业出版社, 2006. 完成期限 2013.2.25——2013.3.8 指导教师李宏玉任爽 2013年 2 月25 日
目录 1课题背景 (1) 2直流电动机开环调速系统仿真的原理 (2) 3仿真过程 (5) 3.1仿真原理图 (5) 3.2仿真结果 (9) 4仿真分析 (12) 5总结 (13) 参考文献 (14)
1课题背景 直流调速是现代电力拖动自动控制系统中发展较早的技术。在20世纪60年代,随着晶闸管的出现,现代电力电子和控制理论、计算机的结合促进了电力传动控制技术研究和应用的繁荣。晶闸管-直流电动机调速系统为现代工业提供了高效、高性能的动力。尽管目前交流调速的迅速发展,交流调速技术越趋成熟,以及交流电动机的经济性和易维护性,使交流调速广泛受到用户的欢迎。但是直流电动机调速系统以其优良的调速性能仍有广阔的市场,并且建立在反馈控制理论基础上的直流调速原理也是交流调速控制的基础。现在的直流和交流调速装置都是数字化的,使用的芯片和软件各有特点,但基本控制原理有其共性。 长期以来,仿真领域的研究重点是仿真模型的建立这一环节上,即在系统模型建立以后要设计一种算法。以使系统模型等为计算机所接受,然后再编制成计算机程序,并在计算机上运行。因此产生了各种仿真算法和仿真软件。 由于对模型建立和仿真实验研究较少,因此建模通常需要很长时间,同时仿真结果的分析也必须依赖有关专家,而对决策者缺乏直接的指导,这样就大大阻碍了仿真技术的推广应用。 MATLAB提供动态系统仿真工具Simulink,则是众多仿真软件中最强大、最优秀、最容易使用的一种。它有效的解决了以上仿真技术中的问题。在Simulink中,对系统进行建模将变的非常简单,而且仿真过程是交互的,因此可以很随意的改变仿真参数,并且立即可以得到修改后的结果。另外,使用MATLAB中的各种分析工具,还可以对仿真结果进行分析和可视化。 Simulink可以超越理想的线性模型去探索更为现实的非线性问题的模型,如现实世界中的摩擦、空气阻力、齿轮啮合等自然现象;它可以仿真到宏观的星体,至微观的分子原子,它可以建模和仿真的对象的类型广泛,可以是机械的、电子的等现实存在的实体,也可以是理想的系统,可仿真动态系统的复杂性可大可小,可以是连续的、离散的或混合型的。Simulink会使你的计算机成为一个实验室,用它可对各种现实中存在的、不存在的、甚至是相反的系统进行建模与仿真。 传统的研究方法主要有解析法,实验法与仿真实验,其中前两种方法在具有各自优点的同时也存在着不同的局限性。随着生产技术的发展,对电气传动在启制动、正反转以及调速精度、调速范围、静态特性、动态响应等方面提出了更高要求,这就要求大量使用调速系统。由于直流电机的调速性能和转矩控制性能好,从20世纪30年代
基于单片机的PWM调速系统
基于单片机的PWM调速系统 摘要 本文主要研究了利用MCS-51系列单片机控制PWM信号从而实现对直流电机转速进行控制的方法。文章中采用了专门的芯片组成了PWM信号的发生系统,并且对PWM信号的原理、产生方法以及如何通过软件编程对PWM信号占空比进行调节,从而控制其输入信号波形等均作了详细的阐述。此外,本文中还采用了芯片IR2110作为直流电机正转调速功率放大电路的驱动模块,并且把它与延时电路相结合完成了在主电路中对直流电机的控制。另外,本系统中使用了测速发电机对直流电机的转速进行测量,经过滤波电路后,将测量值送到A/D转换器,并且最终作为反馈值输入到单片机进行PI运算,从而实现了对直流电机速度的控制。在软件方面,文章中详细介绍了PI运算程序,初始化程序等的编写思路和具体的程序实现。 关键词:PWM信号测速发电机PI运算前言 本文主要研究了利用MCS-51系列单片机,通过PWM方式控制直流电机调速的方法。 冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。PWM控制技术就是以该结论为理论基础,使输出端得到一系列幅值相等而宽度不相等的脉冲,用这些
脉冲来代替正弦波或其他所需要的波形。按一定的规则对各脉冲的宽度进行调制,既可改变逆变电路输出电压的大小,也可改变输出频率。 PWM控制的基本原理很早就已经提出,但是受电力电子器 件发展水平的制约,在上世纪80年代以前一直未能实现。 直到进入上世纪80年代,随着全控型电力电子器件的出现 和迅速发展,PWM控制技术才真正得到应用。随着电力电 子技术、微电子技术和自动控制技术的发展以及各种新的理论方法,如现代控制理论、非线性系统控制思想的应用,PWM 控制技术获得了空前的发展。到目前为止,已经出现了多种PWM控制技术。 PWM控制技术以其控制简单、灵活和动态响应好的优点而 成为电力电子技术最广泛应用的控制方式,也是人们研究的热点。由于当今科学技术的发展已经没有了学科之间的界限,结合现代控制理论思想或实现无谐振软开关技术将会成为PWM控制技术发展的主要方向之一。 本文就是利用这种控制方式来改变电压的占空比实现直流 电机速度的控制。文章中采用了专门的芯片组成了PWM信号的发生系统,然后通过放大来驱动电机。利用直流测速发电机测得电机速度,经过滤波电路得到直流电压信号,把电压信号输入给A/D转换芯片最后反馈给单片机,在内部进行PI运算,输出控制量完成闭环控制,实现电机的调速控制。
直流电机PWM调速与控制设计报告
综合设计报告 单位:自动化学院 学生姓名: 专业:测控技术与仪器 班级:0820801 学号: 指导老师: 成绩: 设计时间:2011 年12 月 重庆邮电大学自动化学院制
一、题目 直流电机调速与控制系统设计。 二、技术要求 设计直流电机调速与控制系统,要求如下: 1、学习直流电机调速与控制的基本原理; 2、了解直流电机速度脉冲检测原理; 3、利用51单片机和合适的电机驱动芯片设计控制器及速度检测电路; 4、使用C语言编写控制程序,通过实时串口能够完成和上位机的通信; 5、选择合适控制平台,绘制系统的组建结构图,给出完整的设计流程图。 6、要求电机能实现正反转控制; 7、系统具有实时显示电机速度功能; 8、电机的设定速度由电位器输入; 9、电机的速度调节误差应在允许的误差范围内。 三、给定条件 1、《直流电机驱动原理》,《单片机原理及接口技术》等参考资料; 2、电阻、电容等各种分离元件、IC、直流电机、电源等; 3、STC12C5A60S2单片机、LM298以及PC机; 四、设计 1. 确定总体方案; 2. 画出系统结构图; 3. 选择以电机控制芯片和单片机及速度检测电路,设计硬件电路; 4. 设计串口及通信程序,完成和上位机的通信; 5. 画出程序流程图并编写调试代码,完成报告;
直流电机调速与控制 摘要:当今社会,电动机作为最主要的机电能量转换装置,其应用范围已遍及国民经济的各个领域和人们的日常生活。无论是在工农业生产,交通运输,国防,航空航天,医疗卫生,商务和办公设备中,还是在日常生活的家用电器和消费电子产品(如电冰箱,空调,DVD等)中,都大量使用着各种各样的电动机。据资料显示,在所有动力资源中,百分之九十以上来自电动机。同样,我国生产的电能中有百分之六十是用于电动机的。电动机与人的生活息息相关,密不可分。电气时代,电动机的调速控制一般采用模拟法、PID控制等,对电动机的简单控制应用比较多。简单控制是指对电动机进行启动,制动,正反转控制和顺序控制。这类控制可通过继电器,光耦、可编程控制器和开关元件来实现。还有一类控制叫复杂控制,是指对电动机的转速,转角,转矩,电压,电流,功率等物理量进行控制。 本电机控制系统基于51内核的单片机设计,采用LM298直流电机驱动器,利用PWM 脉宽调制控制电机,并通过光耦管测速,经单片机I/O口定时采样,最后通过闭环反馈控制系统实现电机转速的精确控制,其中电机的设定速度由电位器经A/D通过输入,系统的状显示与控制由上位机实现。经过设计和调试,本控制系统能实现电机转速较小误差的控制,系统具有上位机显示转速和控制电机开启、停止和正反转等功能。具有一定的实际应用意义。关键字:直流电机、反馈控制、51内核、PWM脉宽调制、LM298 一、系统原理及功能概述 1、系统设计原理 本电机控制系统采用基于51内核的单片机设计,主要用于电机的测速与转速控制,硬件方面设计有可调电源模块,串口电路模块、电机测速模块、速度脉冲信号调理电路模块、直流电机驱动模块等电路;软件方面采用基于C语言的编程语言,能实现系统与上位机的通信,并实时显示电机的转速和控制电机的运行状态,如开启、停止、正反转等。 单片机选用了51升级系列的STC12c5a60s2作为主控制器,该芯片完全兼容之前较低版本的所有51指令,同时它还自带2路PWM控制器、2个定时器、2个串行口支持独立的波特率发生器、3路可编程时钟输出、8路10位AD转换器、一个SPI接口等,
直流电动机开环调速系统设计与仿真
东北大学秦皇岛分校控制工程学院自动控制系统课程设计 设计题目:直流电动机开环调速系统 设计与仿真 专业名称自动化 班级学号 学生姓名 指导教师 设计时间2015.7.13~2014.7.24 成绩
目录 1.设计任务书 (3) 2.概述 (4) 2.1前言 (4) 2.2 系统原理 (4) 2.3 simulink框图 (5) 3.元件参数设置 (7) 3.1三相交流电压源设置 (7) 3.2.同步六脉冲触发器 (7) 3.3.三相全控桥整流电路 (8) 3.4.直流电动机设计 (8) 4.仿真结果分析 (9) α=时 (12) 4.2 当30o α=时 (14) 4.3 当60o α=时 (17) 4.4 当90o 4.5励磁电流 (19) 5.结论 (20) 6.参考文献 (22) 7.结束语 (22)
东北大学秦皇岛分校控制工程学院 《自动控制系统》课程设计任务书 专业自动化班级姓名 设计题目:直流电动机开环调速系统设计与仿真 一、设计实验条件 地点:实验室 实验设备:PC机 二、设计任务 直流电动机的额定数据为220V,136A,1460r/min,4极, R=0.21 , a 22 GD=22.5N m;励磁电压为220V,励磁电流为1.5A。采用三相桥式全控整流电路。平波电抗器 L=200mH。 p 设计要求:设计并仿真该晶闸管-电动机(V-M)开环调速系统。观察电动机在全压起动和起动后加额定负载时电动机的转速、转矩和电流变化。 三、设计说明书的内容 1、设计题目与设计任务(设计任务书) 2、前言(绪论)(设计的目的、意义等) 3、主体设计部分 4、参考文献 5、结束语 四、设计时间与设计时间安排 1、设计时间:7月13日~7月24日 2、设计时间安排: 熟悉课题、收集资料:3天(7月13日~7月15日) 具体设计(含上机实验):6天(7月16日~7月21日) 编写课程设计说明书:2天(7月22日~7月23日) 答辩:1天(7月24日)
直流电机调速控制系统设计
成绩 电气控制与PLC 课程设计说明书 直流电机调速控制系统设计 . Translate DC motor speed Control system design 学生姓名王杰 学号20130503213 信电工程学院13自动 学院班级 化 专业名称电气工程及其自动化 指导教师肖理庆
201 6年 6 月 14 日
目录 1 直流电机调速控制系统模型 0 1.1 直流调速系统的主导调速方法 0 因此,降压调速是直流电机调速系统的主导调速方法。 0 1.2 直流电机调速控制的传递函数 0 1.2.1 电流与电压的传递函数 (1) 1.2.2 电动势与电流的传递函数 (1) 由已学可知,单轴系统的运用方程为: (1) 1.3 直流调速系统的控制方法选择 (3) 1.3.1 开环直流调速系统 (3) 1.3.2 单闭环直流调速系统 (3) 由前述分析可知,开环系统不能满足较高的调速指标要求,因此必须采取闭环控制系统。图1-4所示的是,转速反馈单闭环调速系统,其是一种结构相对复杂的反馈控制系统。转速控制是动态性能的控制,相比开环系统,速度闭环控制的控制精度及控制稳定性要好得多,但缺乏对于静态电流I的有效控制,故这类系统被称之为“有静差”调速系统。 (4) 1.3.3 双闭环直流调速系统 (4) 图1-4 双闭环控制直流调速控制系统 (4) 1.3.3.1 转速调节器(ASR) (4) 1.3.3.1 电流调节器(ACR) (4) 1.4 直流电机的可逆运行 (5) 1.2 ×××××× (7) 1.2.1 电流与电压的传递函数 (7) (8) 3 PLC在直流调速系统中的应用 (8) 2 ××××× (9) 2.1 ×××××× (9) 2.1.1 ×××× (9) 3 ××××× (11) 3.1 ×××××× (11) 3.1.1 ×××× (11) 参考文献 (12) 附录 (13) 附录1 (13)
直流调速系统的MATLAB仿真(参考程序)汇总.
直流调速系统的MATLAB 仿真 一、开环直流速系统的仿真 开环直流调速系统的电气原理如图1所示。直流电动机的电枢由三相晶闸管整流电路经平波电抗器L 供电,通过改变触发器移相控制信号c U 调节晶闸管的控制角α,从而改变整流器的输出电压,实现直流电动机的调速。该系统的仿真模型如图2所示。 图1 开环直流调速系统电气原理图 图2 直流开环调速系统的仿真模型 为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感s 0L =,直流电动机励磁由直流电源直接供电。触发器(6-Pulse )的控制角(alpha_deg )由移相控制信号c U 决定,移相特性的数学表达式为 min c cmax 9090U U αα?-=?-
在本模型中取min 30α=?,cmax 10V U =,所以c 906U α=-。在直流电动机的负载转矩输入端L T 用Step 模块设定加载时刻和加载转矩。 仿真算例1 已知一台四极直流电动机额定参数为N 220V U =,N 136A I =, N 1460r /min n =,a 0.2R =Ω,2222.5N m GD =?。励磁电压f 220V U =,励磁电流f 1.5A I =。采用三相桥式整流电路,设整流器内阻rec 0.3R =Ω。平波电抗器 d 20mH L =。仿真该晶闸管-直流电动机开环调速系统,观察电动机在全压起动和起动后加额定负载时的电机转速n 、电磁转矩 e T 、电枢电流d i 及电枢电压d u 的变化情况。N 220V U = 仿真步骤: 1)绘制系统的仿真模型(图2)。 2)设置模块参数(表1) ① 供电电源电压 N rec N 2min 2200.3136 130(V)2.34cos 2.34cos30U R I U α++?= =≈?? ② 电动机参数 励磁电阻: f f f 220146.7()1.5 U R I = ==Ω 励磁电感在恒定磁场控制时可取“0”。 电枢电阻: a 0.2R =Ω 电枢电感由下式估算: N a N N 0.422019.1 19.10.0021(H)2221460136 CU L pn I ?==?≈??? 电枢绕组和励磁绕组间的互感af L : N a N e N 2200.2136 0.132(V min/r)1460 U R I K n --?= =≈?
直流电机调速计算机控制技术课程设计
计算机控制技术课程设计 专业:自动化 班级: 姓名: 学号: 指导教师: 兰州交通大学自动化与电气工程学院 2016年07月15日
直流电机调速系统设计 1设计目的 本课程设计是在修完《计算机控制技术A》课程之后,为加强对学生系统设计和应用能力的培养而开设的综合设计训练环节。本课程设计结合《计算机控制技术A》课程的基础理论,重点强调实际应用技能训练,包括计算机控制系统算法软件和硬件设计。其课程设计任务是使学生通过应用计算机控制技术的基本理论,基本知识与基本技能,掌握计算控制技术中各主要环节的设计、调试方法,初步掌握并具备应用计算机进行设备技术改造和产品开发的能力,培养学生的创新意识,提高学生的动手能力、分析问题和解决问题的能力。 2 设计方法 设计一个直流电机系统,合理选择PID控制规律,掌握被控对象参数检测方法、H桥驱动的功能、旋转编码器的功能、单片机PWM控制波形输出方法,进一步加强对课堂理论知识的理解与综合应用能力,进而提高解决实际工程问题的能力。直流电机调速系统是以电机转速作为变量,单片机根据采集电机转速的测量值与设定值的偏差去控制PWM波形的脉宽,从而改变直流电机两端的电压,达到控制转速的目的。直流电机调速系统由单片机、直流电机、光电式旋转编码器、H桥驱动、LCD显示屏等及相关电路组成。 3 设计方案及原理 3.1系统功能介绍 整个控制系统由控制器、执行器、被控对象和测量变送组成,在本次控制系统中控制器为单片机,采用算法为PID增量算法控制规律,执行器为H桥驱动电路,测量变送器为光电式旋转编码器,被控对象为直流电机。然后通过单片机对数据进行处理,控制转速的大小和正反转。 3.2系统组成总体结构 计算机控制系统由控制计算机系统和生产过程两大部分组成。控制计算机是指按生产过程控制的特点和要求而设计的计算机系统,它可以根据系统的规模和要求选择或设计不同种类的计算机。计算机控制系统基本结构如图1所示。
微机原理课程设计—直流电机闭环调速控制系统
实验课题:直流电机调速控制 实验内容: 本实验完成的是一个实现对直流电机转速调节的应用。 编写实验程序,用ADC0809完成模拟信号到数字信号的转换。输入模拟信号有A/D转换单元可调电位器提供的0~5V,将其转换后的数字信号读入累加器,做为控制电机的给定转速。用8255的B口作为直流电机的控制信号输出口,通过对电机转速反馈量的运算,调节控制信号,达到控制电机匀速转动的的作用。并将累加器中给定的转速和当前测量转速显示在屏幕上。再通过LED灯显示出转速的大小变化。 实验目的: (1)学习掌握模/数信号转换的基本原理。 (2)掌握的ADC0809、8255芯片的使用方法。 (3)学习PC系统中扩展简单I/O接口的方法。 (4)了解实现直流电机转速调节的基本方法。 实验要求: 利用微机接口实验系统的硬件资源,运用汇编语言设计实现直流电机的调速控制功能。 基本功能要求:1、利用A/D转换方式实现模拟量给定信号的采样;2、实现PWM方式直流电机速度调节;3、LED灯显示当前直流电机速度状态。 实验设备: (1)硬件要求: PC微机一台、TD-PIT实验系统一套 (2)软件要求:唐都编程软件,tdpit编程软件,“轻松编程”软件 实验原理: 各芯片的功能简介: (1)8255的基本输出接口电路: 并行接口是以数据的字节为单位与I/O设备或被控制对象之间传递信息,CPU 和接口之间的数据传递总是并行的,即可以同时进行传递8位,16位,32位等。8255可编程外围接口芯片是具有A、B、C三个并行接口,+5V单电源供电,能在以下三种方式下工作:方式0—基本输入/出方式、方式1—选通输入/出方式、方式2—双向选通工作方式。
PWM电机调速原理及51单片机PWM程序经典
Pwm电机调速原理 对于电机的转速调整,我们是采用脉宽调制(PWM)办法,控制电机的时候,电源并非连续地向电机供电,而是在一个特定的频率下以方波脉冲的形式提供电能。不同占空比的方波信号能对电机起到调速作用,这是因为电机实际上是一个大电感,它有阻碍输入电流和电压突变的能力,因此脉冲输入信号被平均分配到作用时间上,这样,改变在始能端PE2 和PD5 上输入方波的占空比就能改变加在电机两端的电压大小,从而改变了转速。 此电路中用微处理机来实现脉宽调制,通常的方法有两种: (1)用软件方式来实现,即通过执行软件延时循环程序交替改变端口某个二进制位输出逻 辑状态来产生脉宽调制信号,设置不同的延时时间得到不同的占空比。 (2)硬件实验自动产生PWM 信号,不占用CPU 处理的时间。 这就要用到ATMEGA8515L 的在PWM 模式下的计数器1,具体内容可参考相关书籍。 51单片机PWM程序 产生两个PWM,要求两个PWM波形占空都为80/256,两个波形之间要错开,不能同时为高电平!高电平之间相差48/256, PWM这个功能在PIC单片机上就有,但是如果你就要用51单片机的话,也是可以的,但是比较的麻烦.可以用定时器T0来控制频率,定时器T1来控制占空比:大致的的编程思路是这样的:T0定时器中断是让一个I0口输出高电平,在这个定时器T0的中断当中起动定时器T1,而这个T1是让IO口输出低电平,这样改变定时器T0的初值就可以改变频率,改变定时器T1的初值就可以改变占空比。 *程序思路说明: * * * *关于频率和占空比的确定,对于12M晶振,假定PWM输出频率为1KHZ,这样定时中断次数* *设定为C=10,即0.01MS中断一次,则TH0=FF,TL0=F6;由于设定中断时间为0.01ms,这样* *可以设定占空比可从1-100变化。即0.01ms*100=1ms * ******************************************************************************/ #include
直流电机调速电路的设计
课程设计说明书 直流电机调速电路的设计 系、部: 学生姓名: 指导教师: 专业: 班级: 完成时间: 摘要
将电子技术和控制技术引入传统的电力技术领域,利用半导体开关器件组成各种电力变换电路实现电能的变换和控制,构成了一门完整的学科,被国际电工委员会命名为电力电子学或称为电力电子技术,他是一门综合了电子技术,控制技术和电力技术的新兴交叉学科。直流电机是电机的主要类型之一。一台直流电机即可作为发电机使用,也可作为电动机使用,用作直流发电机可以得到直流电源,而作为直流电动机,由于其具有良好的调速性能,在许多调速性能要求较高的场合,仍得到广泛使用。直流电动机是人类最早发明和应用的有一种电机。直流电动机是将直流电转换为的旋转机械。他与交流电动机相比,虽然直流电动机因为结构复杂,维护困难,价格比较贵等缺点制约了它的发展,应用不如交流电动机广泛。但由于直流电动机有优良的启动,调速和制动性能,因此在工业领域中仍占有一席之地。 关键词电力电子技术;直流电动机;机械能 ABSTRACT
Will the electronic technology and control technology into the traditional power technology, using semiconductor switching parts of all kinds of power transformation of electric power circuit implementation transformation and control, constitute a complete discipline, be door to the international electrotechnical commission named power electronics or called power electronic technology, he is a comprehensive electronic technology, control technology and the emerging interdisciplinary power technology. Dc motor is one of the main types of the motor. A dc motor as a generator can use, also can use as a motor, used as dc generators can get dc power, and as a dc motor, since it has good performance of speed adjustment, in many speed performa, is still widely used. Dc motor is the earliest human invention and application of a kind of motor. Current motor is converted to dc of rotating machine. He compared with ac motor, although dc motor for the complex structure, maintenance difficulties, price is more expensive shortcomings constrains its development, the application as ac motor widely. But because of dc motor with fine start, speed and braking performance, so in industry still has a place. Key words power electronic technology; dc motor; mechanical energy 目录
直流电动机调速控制系统论文
安徽三联学院 年度论文 直流电动机调速系统的研究 Dc motor speed control system research 专业:电气工程及其自动化 姓名:薄朋_____________ 学号: 1002164___________ 指导老师:张金翰________ 2013年1月10日 信息与通信技术系
【摘要】直流电动机诞生与19世纪,距今已有100多年的历史,并已成为动力机械的主要驱动装置。直流调速系统具有优良的启动、制动性能,宜于在宽广范围内平滑调速,在需要高性能可控电力拖动的领域中得到了广泛的应用。电动机拖动生产机械运行时,系统的速度需要根据工作状态和工艺要求的不同进行调节,使生产机械以最合理的速度工作,从而提高产品和生产效率,这就要求人为采取一定的方法来改变生产机械的工作速度,以满足生产的需要。 关键字:直流电动机调速 【abstract 】Dc motor was born in the 19th century, more than 100 years of history, and has become the main drive power machinery. Dc speed control system has good start, braking performance, like in the wide range smoothing speed and are in need of high performance controlled electric drive field has been widely used in the field. Motor drive production machine operation, the speed of the system need according to the working status and technological requirements of different carries on the adjustment, production machinery with the most reasonable speed work, so as to improve the products and production efficiency, this requires people to take certain method to change the production machinery working speed, in order to meet production need. Key words: Dc motor speed regulation
双闭环直流电动机调速系统设计及MATLAB仿真设计
目录 1、引言 (3) 二、初始条件: (3) 三、设计要求: (3) 四、设计基本思路 (4) 五、系统原理框图 (4) 六、双闭环调速系统的动态结构图 (4) 七、参数计算 (5) 1. 有关参数的计算 (5) 2. 电流环的设计 (6) 3. 转速环的设计 (7) 七、双闭环直流不可逆调速系统线路图 (9) 1.系统主电路图 (9) 2.触发电路 (10) 3.控制电路 (14) 4. 转速调节器ASR设计 (14) 5. 电流调节器ACR设计 (15) 6. 限幅电路的设计 (15) 八、系统仿真 (16) 1. 使用普通限幅器进行仿真 (16) 2. 积分输出加限幅环节仿真 (17) 3. 使用积分带限幅的PI调节器仿真 (18) 九、总结 (21)
一、设计目的 1.联系实际,对晶闸管-电动机直流调速系统进行综合性设计,加深对所学 《自动控制系统》课程的认识和理解,并掌握分析系统的方法。 2.熟悉自动控制系统中元部件及系统参数的计算方法。 3.培养灵活运用所学自动控制理论分析和解决实际系统中出现的各种问题 的能力。 4.设计出符合要求的转速、电流双闭环直流调速系统,并通过设计正确掌 握工程设计的方法。 5.掌握应用计算机对系统进行仿真的方法。 二、初始条件: 1.技术数据 (1)直流电机铭牌参数:P N =90KW, U N =440V, I N =220A, n N =1500r/min, 电枢电阻Ra=0.088Ω,允许过载倍数λ=1.5; (2)晶闸管整流触发装置:Rrec=0.032Ω,Ks=45-48。 (3)系统主电路总电阻:R=0.12Ω (4)电磁时间常数:T1=0.012s (5)机电时间常数:Tm =0.1s (6)电流反馈滤波时间常数:Toi=0.0025s,转速率波时间常数:Ton=0.014s. (7)额定转速时的给定电压:Unm =10V (8)调节器饱和输出电压:10V 2.技术指标 (1)该调速系统能进行平滑的速度调节,负载电机不可逆运行,具有较宽的调速围(D≥10),系统在工作围能稳定工作; (2)系统静特性良好,无静差(静差率s≤2); (3)动态性能指标:转速超调量δn<8%,电流超调量δi<5%,动态速降Δn≤8-10%,调速系统的过渡过程时间(调节时间)ts≤1s; (4)调速系统中设置有过电压、过电流等保护,并且有制动措施。三、设计要求: (1)根据题目的技术要求,分析论证并确定主电路的结构型式和闭环调速系统的组成,画出系统组成的原理框图; (2)调速系统主电路元部件的确定及其参数计算。 (3)动态设计计算:根据技术要求,用Mrmin准则设计转速环,确定ASR 调节器与ACR调节器的结构型式及进行参数计算,使调速系统工作稳 定,并满足动态性能指标的要求; (4)绘制V-M双闭环直流不可逆调速系统线路图(主电路、触发电路、控
单片机课程设计完整版《PWM直流电动机调速控制系统》
单片机原理及应用课程设计报告设计题目: 学院: 专业: 班级: 学号: 学生姓名: 指导教师: 年月日 目录
设计题目:PWM直流电机调速系统 本文设计的PWM直流电机调速系统,主要由51单片机、电源、H桥驱动电路、LED 液晶显示器、霍尔测速电路以及独立按键组成的电子产品。电源采用78系列芯片实现+5V、+15V对电机的调速采用PWM波方式,PWM是脉冲宽度调制,通过51单片机改变占空比实现。通过独立按键实现对电机的启停、调速、转向的人工控制,LED实现对测量数据(速度)的显示。电机转速利用霍尔传感器检测输出方波,通过51单片机对1秒内的方波脉冲个数进行计数,计算出电机的速度,实现了直流电机的反馈控制。 关键词:直流电机调速;定时中断;电动机;波形;LED显示器;51单片机 1 设计要求及主要技术指标: 基于MCS-51系列单片机AT89C52,设计一个单片机控制的直流电动机PWM调速控制装置。 设计要求 (1)在系统中扩展直流电动机控制驱动电路L298,驱动直流测速电动机。 (2)使用定时器产生可控的PWM波,通过按键改变PWM占空比,控制直流电动机的转速。 (3)设计一个4个按键的键盘。 K1:“启动/停止”。 K2:“正转/反转”。 K3:“加速”。 K4:“减速”。 (4)手动控制。在键盘上设置两个按键----直流电动机加速和直流电动机减速键。在
手动状态下,每按一次键,电动机的转速按照约定的速率改变。 (5)*测量并在LED显示器上显示电动机转速(rpm). (6)实现数字PID调速功能。 主要技术指标 (1)参考L298说明书,在系统中扩展直流电动机控制驱动电路。 (2)使用定时器产生可控PWM波,定时时间建议为250us。 (3)编写键盘控制程序,实现转向控制,并通过调整PWM波占空比,实现调速; (4)参考Protuse仿真效果图:图(1) 图(1) 2 设计过程 本文设计的直流PWM调速系统采用的是调压调速。系统主电路采用大功率GTR为开关器件、H桥单极式电路为功率放大电路的结构。PWM调制部分是在单片机开发平台之上,运用汇编语言编程控制。由定时器来产生宽度可调的矩形波。通过调节波形的宽度来控制H电路中的GTR通断时间,以达到调节电机速度的目的。增加了系统的灵活性和精确性,使整个PWM脉冲的产生过程得到了大大的简化。 本设计以控制驱动电路L298为核心,L298是SGS公司的产品,内部包含4通道逻辑驱动电路。是一种二相和四相电机的专用驱动器,即内含二个H桥的高电压大电流双全桥式驱动器,接收标准TTL逻辑电平信号,可驱动46V、2A以下的电机。可驱动2个电机,OUTl、OUT2和OUT3、OUT4之间分别接2个电动机。5、7、10、12脚接输入控制电平,控制电机的正反转,ENA,ENB接控制使能端,控制电机的停转。 本设计以AT89C52单片机为核心,如下图(2),AT89C52是一个低电压,高性能 8位,片内含8k bytes的可反复擦写的只读程序存储器和256 bytes的随机存取数据存储器(),器件采用的高密度、非易失性存储技术生产,兼容标准MCS-51指令系统,片内置通用8位中央处理器和Flash存储单元,AT89C52单片机在电子行业中有着广泛的应用。 图(2) 对直流电机转速的控制即可采用开环控制,也可采用闭环控制。与开环控制相比,速度控制闭环系统的机械特性有以下优越性:闭环系统的机械特性与开环系统机械特性相比,其性能大大提高;理想空载转速相同时,闭环系统的静差(额定负载时电机转速降落与理想空载转速之比)要小得多;当要求的静差率相同时, 闭环调速系统的调速范
基于STM32的直流电机调速控制器的设计说明
基于STM32的直流电机调速控制器的设计 摘要:介绍了一款主要由STM32微处理器,IR2110驱动芯片,光电编码器等构成的直流电机PWM调速控制器。详细介绍了直流电机调速原理、光电编码器的工作原理。 并根据整体方案设计,设计了逻辑信号处理电路、IR2110 驱动电路以及主程序,PWM输出子程序等硬软件设计。本设计主要可以应用在小型电动船或车上,具有较高的使用 价值。 关键词:直流电机;光电编码器;PWM;IR2110驱动 A PWM speed controller of DC motor based on STM32 LI Zhi-hong QIAN Chen-liang the School of Automation,Wuhan University of Technology Wuhan HuBei China 430070 Abstract:A PWM speed controller of DC motor based on STM32 is introduced in this paper. The main components of the controller are STM32,IR2110 driver IC,photoelectric encoder and so on. This paper elaborated on the governor principle of DC motor and working principle of photoelectric encoder. According to
the entire project plan,the hardware and software design,including signal processing logic circuit, IR2110 driver circuit,main program and PWM subroutine were designed. This controller mainly applied on small electric boat or car,which owns higher use value. Keywords:DC motor;photoelectric encoder;PWM;IR2110 driver 1 前言 随着电力电子技术的发展,直流电机靠其优良的控制 性能和线性特性等诸多特点在工业控制、航海、汽车工程 和精密家电等诸多领域内被广泛应用。[1]经过多年的研发,如今的直流电机调速技术也已经达到了一个新的高度在精 准性、可控性和抗干扰性能的优良性上得到了很大的提高。 [2] 如今,数字式直流调速系统已经逐渐变成了主流,本 文以STM32作为主控芯片,IR2110为驱动芯片设计了一款直流电机控制器,可以通过调节光电编码器的旋转方向和 角度来控制直流电机的转速和转向。该控制器可以应用于 小型电动船或车上,具有较高使用价值。 2具体原理和方法 2.1直流电机调速原理
基于STC52单片机的直流电机PWM调速系统
实训报告 实训名称直流电机调速试验系别电子与电气工程学院专业、班级09测控C1 学生姓名、学号刘凡094821257 学生姓名、学号沈阳094821345 学生姓名、学号覃新造094820364 指导教师陈进 实训地点16号楼212室 实训日期2012 年5月20日
基于STC52单片机的直流电机PWM调速系统 摘要 本文介绍一种基于STC52单片机控制的PWM直流电机脉宽调速系统。系统以廉价的STC52单片机为控制核心,以直流电机为控制对象。从系统的角度出发,对电路进行总体方案论证设计,确定电路各个的功能模块之间的功能衔接和接口设置,详细分析了各个模块的方案论证和参数设置。整个系统利用52单片机的定时器产生1K左右的PWM脉冲,通过快速光耦6N137实现控制单元与驱动单元的强弱电隔离,采用4个9013和2个9012构成的H桥电路实现对直流电机的调速,用光电编码盘完成测速功能。 关键字STC52,PWM,光耦隔离,光电编码盘
1前言 1.1数字直流调速的意义 现在电气传动的主要方向之一是电机调速系统采用微处理器实现数字化控制。从上世纪80年代中后期起,世界各大电气公司如ABB、通用、西屋、西门子等都在竞相开发数字式调速传动装置,经过二十几年的发展,当前直流调速已发展到一个很高的技术水平:功率元件采用可控硅;控制板采用表面安装技术;控制方式采用电源换相、相位控制[1]。特别是采用了微处理器及其他先进电力电子技术,使数字式直流调速装置在精度的准确性、控制性能的优良性和抗干扰的性能有很大的提高和发展,在国内外得到广泛的应用。数字化直流调速装置作为目前最新控制水平的传动方式显示了强大优势。全数字化直流调速系统不断升级换代,为工程应用和工业生产提供了优越的条件。 采用微处理器控制,使整个调速系统的数字化程度,智能化程度有很大改观;采用微处理器控制,使调速系统在结构上简单化,可靠性提高,操作维护变得简捷,电机稳态运行时转速精度等方面达到较高水平。由于微处理器具有较佳的性价比,所以微处理器在工业过程及设备控制中得到日益广泛的应用。近年来,尽管交流调速系统发展很快,但是直流电机凭借其良好的启动、制动性能,在金属切削机床、轧钢机、海洋钻机、挖掘机、造纸机、矿井卷扬机、电镀、高层电梯等需要广泛范围内平滑调速的高性能可控电力拖动领域中仍得到了广泛的应用。 现阶段,我国还没有自主的全数字化直流调速控制装置生产商,而国外先进的控制器价格昂贵,且技术转让受限,为此研究及更好的使用国外先进的控制器,吸收国外先进的数字化直流电机调速装置的优点,具有重要的实际意义和重大的经济价值。 1.2研究现状综述 1.2.1电气传动的发展现状 20世纪70年代以来,直流电机传动经历了重大的技术、装备变革。整流器的更新换代,以晶闸管整流装置取代了习用已久的直流发电机电动机组及水银整流装置使直流电气传动完成了一次大的跃进[1]。同时,高集成化、小型化、高可靠性及低成本成为控制的电路的发展方向。使直流调速系统的性能指标大幅提高,应用范围不断扩大。直流调速技术不断发展,走向成熟化、完善化、系列化、标准化,在可逆脉宽调速、高精度的电气传动领域中仍然难以替代[1]。 早期直流传动的控制系统采用模拟分离器件构成,由于模拟器件有其固有的缺点,
双闭环直流电机调速的matlab仿真
双闭环直流电机调速系统的设计与MATLAB 仿真 双闭环调速系统的工作原理 转速控制的要求和调速指标 生产工艺对控制系统性能的要求经量化和折算后可以表达为稳态和动态性能指标。设计任务书中给出了本系统调速指标的要求。深刻理解这些指标的含义是必要的,也有助于我们构想后面的设计思路。在以下四项中,前两项属于稳态性能指标,后两项属于动态性能指标 调速范围D 生产机械要求电动机提供的最高转速和最低转速之比叫做调速范围,即 m in m ax n n D = (1-1) 静差率s 当系统在某一转速下运行时,负载由理想空载增加到额定值所对应的转速降落,与理想空载转速之比,称作静差率,即 %1000 ??= n n s nom (1-2) 静差率是用来衡量调速系统在负载变化下转速的稳定度的。 跟随性能指标 在给定信号R (t )的作用下,系统输出量C (t )的变化情况可用跟随性能指标来描述。具体的跟随性能指标有下列各项:上升时间r t ,超调量σ,调节时间s t . 抗扰性能指标 此项指标表明控制系统抵抗扰动的能力,它由以下两项组成:动态降落%max C ?,恢复时间v t . 调速系统的两个基本方面 在理解了本设计需满足的各项指标之后,我们会发现在权衡这些基本指标,即
1) 动态稳定性与静态准确性对系统放大倍数的要求; 2) 起动快速性与防止电流的冲击对电机电流的要求。 采用转速负反馈和PI 调节器的单闭环调速系统,在保证系统稳定的条件下,实现转速无静差,解决了第一个问题。但是,如果对系统的动态性能要求较高,例如要求快速启制动,突加负载动态速降小等等,则单闭环系统就难以满足要求。这主要是因为在单闭环系统中不能完全按照需要来控制动态过程中的电流和转矩。 在电机最大电流受限的条件下,希望充分利用电机的允许过载能力,最好是在过渡过程中始终保持电流为允许的最大值,使电力拖动系统尽可能用最大的加速度起动,到达稳态后,又让电流立即降低下来,使转速马上与负载相平衡,从而转入稳态运行。在单闭环调速系统中,只有电流截止负反馈环节是专门用来控制电流的,但它只是在超过临界电流I dcr 值以后,靠强烈的负反馈作用限制电流的冲击,并不能很理想的控制电流的动态波形。带电流截止负反馈的单闭环调速系统起动时的电流和转速波形如图1-1a 所示。 a) b) 图1-1 调速系统启动过程的电流和转速波形 a) 带电流截止负反馈的单闭环调速系统的启动过程 b) 理想快速启动过程 当电流从最大值降低下来以后,电机转矩也随之减小,因而加速过程必然拖 I d t 0 I 0 t