机载雷达工作模式识别
中图分类号:TN971.1 文献标志码:A 文章编号:1674-2230(2011)01-0014-03
收稿日期:2010-07-30;修回日期:2010-10-12
作者简介:贾朝文,男,硕士研究生;周水楼,男,高级工程师。
机载雷达工作模式识别
贾朝文1,周水楼2
(1.电子信息控制重点实验室,成都610036;2.海军装备研究院系统所,北京100073)
摘要:实现雷达工作模式识别对机载电子对抗的控制管理及对抗资源分配具有重要意义。针对各型雷达尤其是机载有源相控阵雷达多种工作模式的特点,分析了机载雷达工作模式识别机理,提出了识别方法。
关键词:机载雷达;工作模式;识别
Work Mode Identification of Airborne Radar
JIA Chao -wen 1,ZHOU Shu-i lou 2
(1.Science and Technology on Electronic Information Control Laboratory,Chen gdu 610036,China;
2.System Divi sion of Naval Equip ment Insti tue,Beijing 100073,Chi na)
Abstract:Work mode identification of radar is very important for airborne EC M s control management
and resource allocation.As to radar,especially airborne radar s multiple work modes,identification principle is analyzed and identification method is presented for airborne radar.Key words:airborne radar;work mode;identification
1 引言
载机必须在最危急时刻正确进行控制管理(如攻击或防御)以提高作战能力和生存力。机载自卫电子对抗措施(ECM)采取多种有源无源对抗措施实现对敌机载火控雷达及导弹武器系统的对抗以保护载机安全。受干扰功率影响和收发隔离限制,机载自卫EC M 主要对敌机载雷达主瓣,根据多目标干扰能力对最具威胁的几个目标进行干扰。当敌机载雷达对载机进行跟踪(导弹发射前)或敌已发射空空导弹并中制导时,对载机构成非常大的威胁,载机必须快速正确对抗响应,破坏敌机载雷达跟踪状态迫使其进入搜索状态而不能发射空空导弹,或使其在一定时间内不能为已发射空空导弹提供制导指令而使其攻击能力大大下降,挫败敌 先敌发现 和 先敌发射 。载机能够快速恰当地对抗响应的前提是正确识别敌机载雷达工作模式和工作状态。
美第四代战斗机F-35机载雷达告警器能够分析、鉴别和跟踪敌方雷达信号,区分敌方雷达的工作模式,并能够对敌雷达进行精确无源定位。通过识别敌方雷达信号特征(例如不同的频率、脉冲宽度和脉冲重复频率等)上的差异,F-35的综合电子战系统可以区分敌方不同的雷达型号;而区分敌方雷达的工作模式相对比较困难,这要根据美军已经掌握的敌方各种雷达的不同工作模式下的信号特征来鉴别,这就需要强大的数据库系统的支持。
通过对敌机载雷达工作模式分析可以实现威胁等级判别和干扰样式选择。对于机载多功能雷达,RWS(边测距边跟踪搜索)、VS(速度搜索)模式的威胁等级比TWS(Track -while -scan)、STT(单目标跟踪)、DTT(双目标跟踪)、MTT(多目标跟踪)模式低。威胁等级直接影响电子战系统对目标的干扰决策和干扰资源分配管理。对雷达的不同工作模
14
贾朝文,周水楼机载雷达工作模式识别
电子信息对抗技术 第26卷
2011年1月第1期
式,可以采用不同的最佳干扰样式,如压制或欺骗干扰。压制干扰包括噪声干扰,复合干扰等;欺骗干扰包括拖距干扰、拖速干扰,距离和速度相关拖引干扰。
对机载雷达工作模式判断在机载自卫EC M 中具有非常重要的作用。本文分析了机载雷达几种典型工作模式,提出了机扫雷达和相扫雷达识别方法,分析了机载脉冲多普勒(PD)雷达特点,提出了雷达工作模式识别机理和方法。
2 机载雷达主要工作模式
机载雷达对空、对地、对海有多种工作模式。机载雷达对空工作时的主要工作模式包括RWS (Rangle While Search,边测距边跟踪搜索)、VS(Ve-locity Search,速度搜索)、VSR(Velocity Search Range,边测距边速度搜索方式)、TWS(Track-while-scan)、TAS(Track and Search跟踪加搜索)、STT (Single Target Track,单目标跟踪)、SAM(Situation Awareness Mode,态势探查模式)等。上述各种工作模式的特点如下所述。
RWS:提供上视/下视,全方位和在严重杂波环境中的空战目标的探测。使用高峰值功率和中重复频率波形时,可提供精确的目标数据,并具有良好的全方位探测特性和最小的盲区。该方式虚警率很低。
VS:侦测和显示目标相对于飞机的逼近速度和方位的第二种雷达搜索模式。如果目标与飞机有一个高的逼近率,那么它即使在侦测远距离上的小目标时也有很好的性能。VS子模式使用和RWS子模式相同的雷达设置(方位扫描范围和高低扫描线数设置)。
VSR:提供对于前半球进入的,无论是上视的,还是下视目标的最大探测距离。完成了探测和确认后,在多功能显示器上将以方位/距离方式显示被探测的目标,对于高、中两种重复频率波形所探测的数据进行融合处理,将有效地消除虚警,便于早期截获和跟踪目标。
TWS:在搜索过程中,当天线波束扫描通过跟踪目标方向时,对其进行跟踪,因而跟踪数据率与搜索数据率相同。这种方式在机械扫描的雷达中被普遍应用,如在机械扫描的机载火控雷达中,要对已发现目标进行跟踪时即采用这种 边搜索边跟踪 方式,因天线波束不能进行高速相控扫描,故雷达的搜索数据率与跟踪数据率只能是一样的。
TAS:此模式是相控阵特有的工作方式,主要利用时间分配原理以不同数据率同时完成搜索与跟踪的功能。相控阵雷达在搜索过程中发现目标之后,一方面对该目标进行跟踪,另一方面还要继续对搜索空域进行搜索,两者是按不同数据率,即不同的搜索数据率与跟踪数据率进行的。一般情况下跟踪数据率高于搜索数据率。
STT:使用驾驶杆和油门把手,可以从任何一种空对空状态进入这种状态。这种状态提供了可靠的精确跟踪、目标参数和交战几何关系。STT 分状态提供跟踪数据,以便支持近距和超视距空对空导弹的发射,也能提供近距射击状态的机炮瞄准具的射击包线。
SAM:该方式向飞行员同时提供搜索和跟踪的功能。该方式在提供对一到两个目标进行高质量跟踪的同时,还可以在飞行员指定的一个独立的空域内,进行其他目标的扫描搜索。跟踪精度可以充分满足导弹对各种超视距目标的攻击。当有重要威胁目标出现在一定距离之内,以及当需要以全部雷达资源去跟踪一个特定的目标时,雷达可以自动转入单目标跟踪方式。
对各种工作模式,雷达的特征是不同的,需要分析其波形特征、脉内特征、个体特征等。不同的特征对载机构成不同的威胁。例如,当一部雷达处于搜索状态,它对载机的威胁程度就比它处于跟踪状态低。机载雷达的不同工作方式,对不同距离目标测距、测速要求,作用距离要求,波形应不同;如VS模式,基本上采用高重复频率,机载PD工作于下视时,采用高重复频率来抗地杂波,否则作用距离将大大下降。
对TWS和TAS模式的识别,需要首先识别雷达是机扫雷达还是相扫雷达,机扫雷达的信号电平通常是呈连续起伏的,相控阵雷达信号电平不像机扫雷达,呈离散跳跃式起伏。相控阵雷达采用数字波束合成技术,空间上实行离散化扫描的搜索跟踪方式,主要以脉冲方式工作,波束指向是离散的,位于法线方向附近相邻波束之间的间距(波束跃度)较小,随着扫描角度 的增大,波束跃度按
1
c os
增大。故接收机接收到的是一串幅度
15
电子信息对抗技术 第26卷2011年1月第1期
贾朝文,周水楼
机载雷达工作模式识别
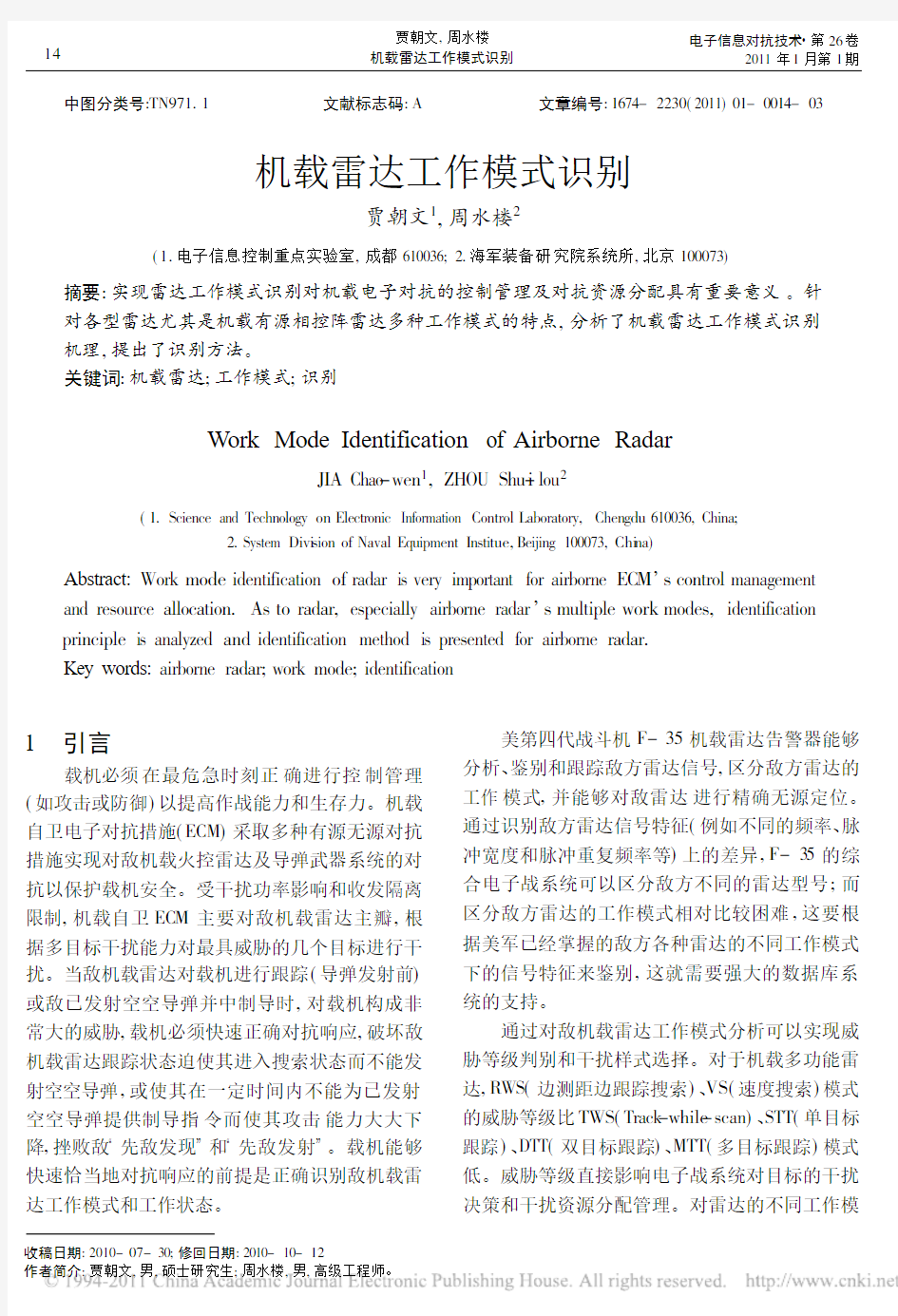
受到相控阵波束方向图函数调制的脉冲群,脉冲串为若干组等幅的脉冲列。而常规机扫雷达当天线波束匀速转动时,接收机接收到的脉冲串是幅度完全受天线方向图调制的脉冲列,因此,可以通过对接收信号精确测幅,比较脉冲包络调制形式,进行相关分析,便可识别出相控阵雷达。图1是
这两种雷达在接收机的扫描幅度特性。
图1 两种雷达在接收机的扫描幅度特性
相控阵雷达是通过控制天线单元激励的幅度和相位来实现波束在空间的扫描,所以其天线的一些特性随着波束的扫描在不停地变化,而常规机扫雷达波束扫描时,天线的基本特性保持不变,两者之间有明显的差异,可以据此识别出相扫雷达或机扫雷达。
3 雷达工作模式识别方法
机载雷达尤其机载有源相控阵雷达采用时频波形捷变、波束捷变、能量管理等措施,具有良好的抗电子对抗措施(ECCM)性能,其复杂多变波形给传统电子战系统带来了挑战。典型机载雷达具有PD 、PC(脉冲压缩)等多种波形,采用常规的分类识别方法,较难实现对雷达工作模式和工作状态的准确判断,且容易在多目标条件下发生增批现象。工作于RWS 、TAS 搜索模式的PD 波形,通常发射多组脉冲重复间隔PRI(如8组),每组重频(一个相参积累间隔CPI)期间频率不改变地发射数千个脉冲,获取30dB 左右相参处理增益,以实现较强的探测能力。工作于TAS 、STT 跟踪状态的PD 波形,通常选取一组PRI 进行相参处理实现射击诸元的高精度测量;PD 波形为了获取相参处理增益,采用帧处理方式,在每一帧处理期间频率不变。PC 波形,通常指大时宽带宽积信号,如有线性调频(LFM)雷达信号,各种相位雷达编码(Phase Code)信号等,从机载雷达抗EC M 技术发展趋势来看,相位编码雷达信号是较佳的低截获
(LPI)雷达波形,具有较好的抗截获能力。
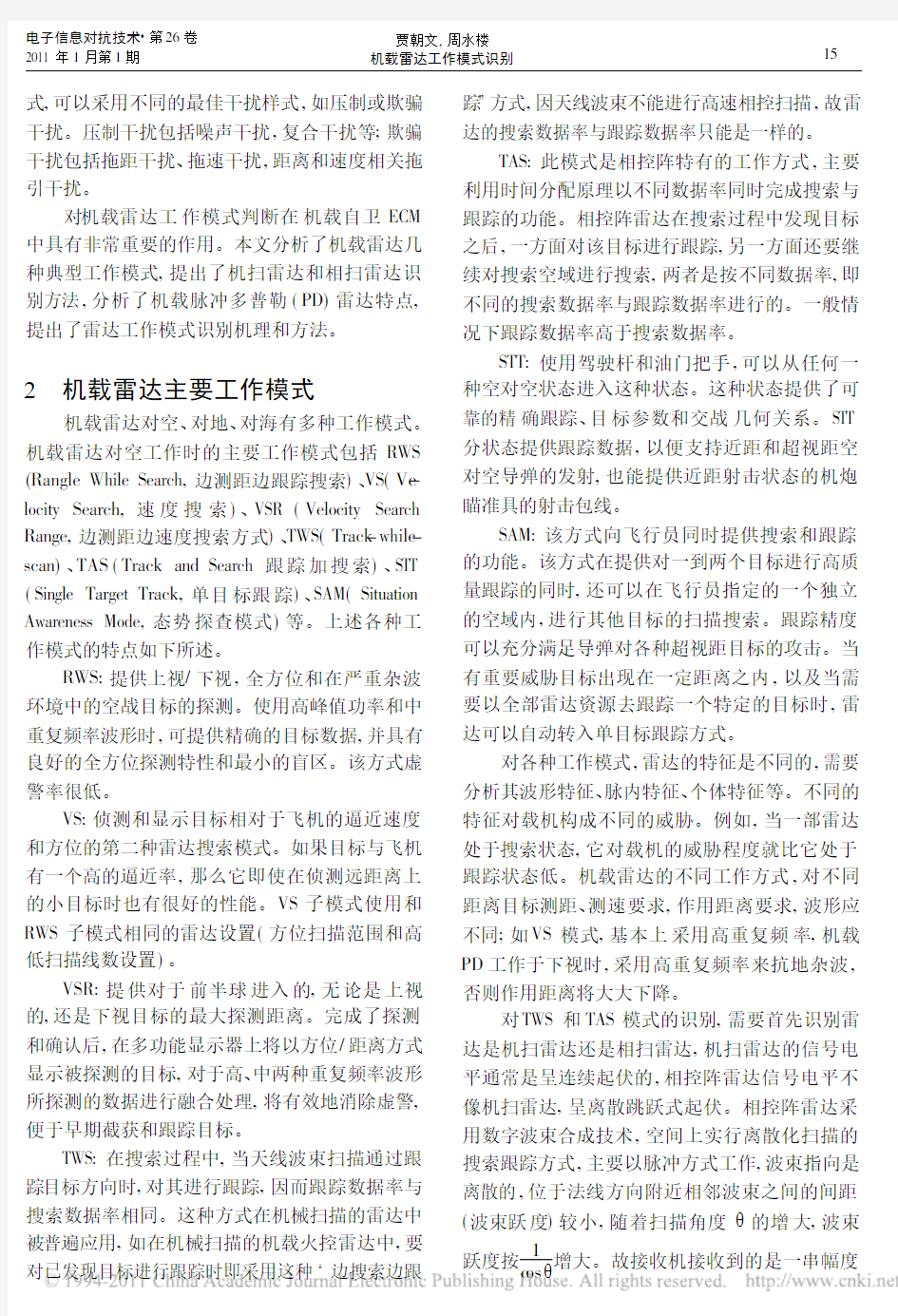
假设机载电子战系统的截获接收机灵敏度和截获概率满足对功率管理或低截获概率(LPI)波形雷达信号的稳定截获要求。实现对雷达工作模式的识别,首先需要实现对机载雷达工作全过程辐射的脉冲参数进行采集、聚类和跟踪处理能力,实时提取CPI 特征。脉冲参数包括到达方位(DOA)、载频(RF)、到达时间(TOA)、脉冲幅度(PA)、脉冲宽度(PW)、其他脉冲特征数据,需要对这些参数进行融合处理进行CPI 特征提取。CPI 特征的提取利用了多部机载火控雷达不会在同一个时间段内工作在相同频率点,利用每个C PI 内脉冲参数稳定及C PI 间脉冲参数具有相
关性等特点对数字ESM 输出的脉冲参数进行融合处理。图2为2部工作于STT 模式雷达的CPI 特征图(RF /MHz,PRI /us,PW /us,PA /dB,DOA /( ),STO A /ms,E TOA /ms)。
图2 2部工作于S TT 模式雷达CPI 特征
对雷达工作模式识别方法见图3。
图3 雷达工作模式识别方法雷达工作模式识别的核心是构建CPI 特征矩阵,然后进行CPI 特征矩阵的关联。通过CPI 矩阵的关联可在一定程度上识别雷达工作模式,如CPI 特征矩阵中某机载雷达的关联C PI 存在多组,可初步判定为威胁雷达工作于搜索状态的RWS 、TAS 、TWS 等模式。
只对CPI 特征矩阵关联进行雷达工作模式识别存在一定模糊性,如对VS 搜索模式使用的
(下转第76页)
16
贾朝文,周水楼机载雷达工作模式识别
电子信息对抗技术 第26卷
2011年1月第1期
(1):70-74.
[3] HWANG C L,YOON K.Multiple Attribute Decision
Making[M].New York:Spring Verlag,1981.
[4] 沈阳,陈永光,李修和.雷达辐射源威胁等级评定的
多属性决策方法[J].航天电子对抗,2006(4):62-
64.
[5] 姜宁.辐射源威胁等级判断的新方法[J].海军大连
舰艇学院学报,2000(1):49-51.
[6] 史军军,薛磊.投影寻踪算法在辐射源威胁等级判
定中的应用[J].电子信息对抗技术,2009,24(5):37
-39.
[7] 姜启源,谢金星,叶俊.数学模型[M].3th ed.北京:
高等教育出版社,2003.
(上接第16页)
HPRF波形与STT跟踪模式下使用的单组PRI波形就难以识别出工作模式。为了实现雷达工作模式准确判定,还需要对威胁雷达天线扫描特性进行识别,将一部威胁雷达在一段时间内(如数十秒)的关联CPI特征矩阵中的时间和幅度变化规律,即天线扫描特性进行分析可较准确判断雷达工作模式,且同时可判断其搜索/跟踪工作状态。
完成对雷达工作模式的识别后,还需对机载雷达型号、平台及属性进行识别,即通常的辐射源及平台识别。实现这些识别需要雷达知识库。雷达知识库通常描述威胁雷达频段范围、重频范围、脉宽范围、脉内特征等,辐射源识别置信度直接取决于雷达知识库的质量。而现有机载雷达为了抗干扰,频段范围越来越宽,而其它参数平时虽然可采用电子侦察等多种手段获取,但其战时使用参数难以获取,威胁雷达知识库难以准确描述各类可能出现的威胁,即雷达知识库可能在某些条件下不是完备的,即使如此,也要求能够实现对辐射源的正确无模糊识别。为了实现辐射源的正确可靠识别,必须减小对威胁雷达知识库的要求。实现了雷达工作模式的识别后,只需将跟踪轨迹上各威胁雷达特征进行聚类,将聚类后的特征向量与雷达知识库进行匹配实现辐射源识别,可完成最小模糊度高置信度的识别。采用这样的辐射源识别方式降低了对雷达知识库的要求,雷达知识库只需保存表征各威胁雷达的特征数据而非全面的数据。
4 结束语
实现对机载雷达工作模式判断,同时也实现机载雷达工作状态识别,为威胁等级排序,以及载机选取合适的对抗措施提供了支持,提高了作战飞机生存能力。由于机载雷达尤其机载相控阵雷达工作模式多样,对工作模式稳定可靠的识别还需要进行深入研究。现有先进机载雷达具有较强ECCM能力,对机载综合电子战系统截获、识别、跟踪及对抗提出新的挑战,该技术要在工程上得到广泛应用,还需要对一体化的机载综合电子战系统的体系架构、机载对抗雷达知识库等结合作战使用进行深入研究,以及在装备上进行不断实践验证。
参考文献:
[1] 王泉祥,黄洁,赵拥军.雷达辐射源识别专家系统的
数据库设计[J].信息工程大学学报,2004(3):38-
41.
[2] 李峥.机载雷达告警技术发展趋势[J].电子信息对
抗技术,2008,23(3):51-54.
[3] 郁洋.PD雷达工作状态识别改进方法研究[J].电子
信息对抗技术,2008,23(6):28-31,35.
[4] 李东昕.复杂环境下多信号干扰技术初探[J].电子
信息对抗技术,2008,23(2):31-33,45.
[5] 陈知明.机载雷达的隐身波形[J].现代雷达,2006
(9):24-26.
[6] 贲德.机载有源相控阵火控雷达的新进展及发展趋
势[J].现代雷达,2008(1):1-4.
[7] 方学立.有源相控阵雷达 机载火控雷达的发展方
向[J].现代军事,2006(12):54-56.
[8] 江卫.机载相控阵火控雷达搜索方式的参数选择
[J].电子科学技术评论,2005(5):15-17.
[9] 郭华,杨小雷,龚亮亮.一种基于模糊隶属度区间决
策的雷达辐射源识别方法[J].电子信息对抗技术,
2009,24(6):45-49.
76
王建钢,耿德仁,李善武
基于多属性决策的辐射源威胁等级判别方法
电子信息对抗技术 第26卷
2011年1月第1期
模式识别实验指导书
类别1234 样本x 1x 2x 1x 2x 1x 2x 1x 2 10.1 1.17.1 4.2-3.0-2.9-2.0-8.4 2 6.87.1-1.4-4.30.58.7-8.90.23-3.5-4.1 4.50.0 2.9 2.1-4.2-7.74 2.0 2.7 6. 3 1.6-0.1 5.2-8.5-3.25 4.1 2.8 4.2 1.9-4.0 2.2-6.7-4.06 3.1 5.0 1.4-3.2-1.3 3.7-0.5-9.27-0.8-1.3 2.4-4.0-3. 4 6.2-5.3-6.7 80.9 1.2 2.5-6.1-4.1 3.4-8.7-6.4 9 5.0 6.48.4 3.7-5.1 1.6-7.1-9.7 10 3.9 4.0 4.1-2.2 1.9 5.1-8.0-6.3 实验一 感知器准则算法实验 一、实验目的: 贝叶斯分类方法是基于后验概率的大小进行分类的方法,有时需要进行概率密度函数的估计,而概率密度函数的估计通常需要大量样本才能进行,随着特征空间维数的增加,这种估计所需要的样本数急剧增加,使计算量大增。 在实际问题中,人们可以不去估计概率密度,而直接通过与样本和类别标号有关的判别函数来直接将未知样本进行分类。这种思路就是判别函数法,最简单的判别函数是线性判别函数。采用判别函数法的关键在于利用样本找到判别函数的系数,模式识别课程中的感知器算法是一种求解判别函数系数的有效方法。本实验的目的是通过编制程序,实现感知器准则算法,并实现线性可分样本的分类。 二、实验内容: 实验所用样本数据如表2-1给出(其中每个样本空间(数据)为两维,x 1表示第一维的值、x 2表示第二维的值),编制程序实现1、 2类2、 3类的分类。分析分类器算法的性能。 2-1 感知器算法实验数据 具体要求 1、复习 感知器算法;2、写出实现批处理感 知器算法的程序1)从a=0开 始,将你的程序应用在和的训练数据上。记下收敛的步数。2)将你的程序应用在和类上,同样记下收敛的步数。3)试解释它们收敛步数的差别。 3、提高部分:和的前5个点不是线性可分的,请手工构造非线性映射,使这些点在映射后的特征空间中是线性可分的,并对它们训练一个感知
雷达工作在哪些波段
雷达工作在哪些波段,工作在不同波段有什么优点? 最早用于搜索雷达的电磁波波长度为23cm ,这一波段被定义为L 波段(英语Long 的字头),后来这一波段的中心波长度变为22cm 。 当波长为10cm 的电磁波被使用后,其波段被定义为S 波段(英语Short 的字头,意为比原有波长短的电磁波)。 在主要使用3cm 电磁波的火控雷达出现后,3cm 波长的电磁波被称为X 波段,因为X 代表坐标上的某点。 为了结合X 波段和S 波段的优点,逐渐出现了使用中心波长为5cm 的雷达,该波段被称为C 波段(C 即Compromise ,英语“结合”一词的字头)。 在英国人之后,德国人也开始独立开发自己的雷达,他们选择1.5cm 作为自己雷达的中心波长。这一波长的电磁波就被称为K 波段(K = Kurtz ,德语中“短”的字头)。 “不幸”的是,德国人以其日尔曼民族特有的“精确性”选择的波长可以被水蒸气强烈吸收。结果这一波段的雷达不能在雨中和有雾的天气使用。战后设计的雷达为了避免这一吸收峰,通常使用频率略高于K 波段的Ka 波段(Ka ,即英语K -above 的缩写,意为在K 波段之上)和略低(Ku ,即英语K -under 的缩写,意为在K 波段之下)的波段。 最后,由于最早的雷达使用的是米波,这一波段被称为P 波段(P 为Previous 的缩写,即英语“以往”的字头)。 该系统十分繁琐、而且使用不便。终于被一个以实际波长划分的波分波段系统取代,这两个系统的换算如下。 原 P 波段 = 现 A/B 波段 原 L 波段 = 现 C/D 波段 原 S 波段 = 现 E/F 波段 原 C 波段 = 现 G/H 波段 原 X 波段 = 现 I/J 波段 原 K 波段 = 现 K 波段 我国现用微波分波段代号 (摘自《微波技术基础》,西电,廖承恩著) 波段代号 标称波长(cm ) 频率波长(cm ) 波长范围 (cm ) L 22 1-2 30-15 S 10 2-4 15-7.5 C 5 4-8 7.5-3.75 X 3 8-12 3.75-2.5 Ku 2 12-18 2.5-1.67 K 1.25 18-27 1.67-1.11 Ka 0.8 27-40 1.11-0.75 U 0.6 40-60 0.75-0.5 V 0.4 60-80 0.5-0.375 W 0.3 80-100 0.375-0.3 我国的频率划分方法 名称 符号 频率 波段 波长 传播特 性 主要用途 甚低频 VLF 3-30KHz 超长波 1KKm-100Km 空间波 为主 海岸潜艇通信;远距 离通信;超远距离导 航
模式识别实验指导书
实验一、基于感知函数准则线性分类器设计 1.1 实验类型: 设计型:线性分类器设计(感知函数准则) 1.2 实验目的: 本实验旨在让同学理解感知准则函数的原理,通过软件编程模拟线性分类器,理解感知函数准则的确定过程,掌握梯度下降算法求增广权向量,进一步深刻认识线性分类器。 1.3 实验条件: matlab 软件 1.4 实验原理: 感知准则函数是五十年代由Rosenblatt 提出的一种自学习判别函数生成方法,由于Rosenblatt 企图将其用于脑模型感知器,因此被称为感知准则函数。其特点是随意确定的判别函数初始值,在对样本分类训练过程中逐步修正直至最终确定。 感知准则函数利用梯度下降算法求增广权向量的做法,可简单叙述为: 任意给定一向量初始值)1(a ,第k+1次迭代时的权向量)1(+k a 等于第k 次的权向量)(k a 加上被错分类的所有样本之和与k ρ的乘积。可以证明,对于线性可分的样本集,经过有限次修正,一定可以找到一个解向量a ,即算法能在有限步内收敛。其收敛速度的快慢取决于初始权向量)1(a 和系数k ρ。 1.5 实验内容 已知有两个样本空间w1和w2,这些点对应的横纵坐标的分布情况是: x1=[1,2,4,1,5];y1=[2,1,-1,-3,-3]; x2=[-2.5,-2.5,-1.5,-4,-5,-3];y2=[1,-1,5,1,-4,0]; 在二维空间样本分布图形如下所示:(plot(x1,y1,x2,y2))
-6-4-20246 -6-4 -2 2 4 6w1 w2 1.6 实验任务: 1、 用matlab 完成感知准则函数确定程序的设计。 2、 请确定sample=[(0,-3),(1,3),(-1,5),(-1,1),(0.5,6),(-3,-1),(2,-1),(0,1), (1,1),(-0.5,-0.5),( 0.5,-0.5)];属于哪个样本空间,根据数据画出分类的结果。 3、 请分析一下k ρ和)1(a 对于感知函数准则确定的影响,并确定当k ρ=1/2/3时,相应 的k 的值,以及)1(a 不同时,k 值得变化情况。 4、 根据实验结果请说明感知准则函数是否是唯一的,为什么?
2014春《文献检索》实验指导书-机械类六个专业-(需要发送电子稿给学课件
《文献检索》实验指导书 刘军安编写 适用专业:机械类各专业 总学时:24~32学时 实验学时:6~14 机械设计与制造教研室 2014. 3
一、课程总实验目的与任务 《文献检索》课程实验是机械学院机械类专业的选修课的实验。通过实验内容与过程,主要培养学生在信息数字化、网络化存储环境下信息组织与检索的原理、技术和方法,以及在数字图书馆系统和数字信息服务系统中检索专业知识的能力,辅助提高21世纪大学生人文素质。通过实验,使学生对信息检索的概念及发展、检索语言、检索策略、检索方法、检索算法、信息检索技术、网络信息检索原理、搜索引擎、信息检索系统的结构、信息检索系统的使用、信息检索系统评价以及所检索信息的分析等技术有一个全面熟悉和掌握。本实验主要培养和考核学生对信息检索基本原理、方法、技术的掌握和知识创新过程中对知识的检索与融合能力。实验主要侧重于培养学生对本专业技术原理和前言知识的信息检索能力,引导学生应理论联系实际,同时要了解本专业科技信息的最新进展和研究动态与走向。 二、实验内容 通过课程的学习,结合老师给出的检索主题,学生应该完成以下内容的实验: 实验一:图书馆专业图书检索(印刷版图书) 实验二:中文科技期刊信息检索 实验三:科技文献数据库信息检索 实验四:网络科技信息检索(含报纸和网络) 文献检索参考主题: 1.工业工程方向: 工业工程;工业工程师的素质、精神、修养、气质与能力;工业工程的本质;企业文化与工业工程;战略工程管理;工程哲学;创新管理;生产管理;品质管理;优化管理或管理的优化;零库存;敏捷制造;敏捷管理;(优秀的、现代的、或未来的)管理哲学;生产管理七大工具;质量管理;设备管理;基础管理;现场管理;六西格玛管理;生产线平衡;工程经济;系统哲学;系统管理;柔性制造;看板管理;工程心理学;管理心理学;激励管理;管理中的真、善、美(或假、恶、丑);工程哲学;工业工程中的责任;安全管理;优化调度;系统工程;系统管理与过程控制;设计哲学;智能管理;工业工程中的数学;智能工业工程,或工业工程的智能化;生态工程管理;绿色工业工程,或绿色管理;协同学与协同管理;工业工程中的协同;概念工程与概念管理;工业工程与蝴蝶效应;管理中的蝴蝶效应,等等…… 2.机械电子工程方向: CAD;CAM;CAE;CAPP;PDM;EPR;CIMS;VD;VM;FMS;PLC;协同设计;协同制造;概念设计;自底向上;自顶向下;智能设计;智能制造;智能材料;特种加工(线切割、电火花、激光加工、电化学加工、超声波加工、光刻技术、快速成型、反求工程);微机械;精密加工;精密制造;机电一体化;自动化;控制论;线性控制;非线性控制;混沌控制;模糊控制;人工智能;神经网络;纳米技术;纳米制造;机器人;智能机器人;传感器;智能传感器;自动化生产线;机械手;智能机械手;自动检测;数据采集;信号处理;信息识别、模式识别等等……
《认知心理学》实验指导
概念形成 简介: 概念是人脑反映事物本质属性的思维形式。个体掌握一类事物本质属性的过程,就是概念形成的过程。实验室中为了研究概念形成的过程,常使用人工概念。 制造人工概念时先确定一个或几个属性作为分类标准,但并不告诉被试,只是将材料交给被试,请其分类。在此过程中,反馈给被试是对还是错。通过这种方法,被试可以发现主试的分类标准,从而学会正确分类,即掌握了这个人工概念。通过人工概念的研究,可以了解概念形成的过程。一般来讲,被试都是经过概括-假设-验证的循环来达到概念形成的。 叶克斯复杂选择器可用来制造人工概念。本实验模拟叶克斯复杂选择器来研究简单空间位置关系概念的形成。 方法与程序: 本实验共有4个人工概念,难度顺次增加,被试可以任选其中1个。 实验时,屏幕上会出现十二个圆键,有空心和实心两种。其中只有一个实心圆与声音相联系,此键出现的相对位置是有规律的,被试要去发现其中的规律(概念),找到这个键。被试用鼠标点击相应的实心圆,如果没有发生任何变化,表明选择错误;如果有声音呈现,同时该圆变为红色,则表明选择正确。只有选择正确,才能继续下一试次。当连续三次第一遍点击就找对了位置时,就认为被试已形成了该人工概念,实验即结束。如果被试在60个试次内不能形成正确概念,实验自动终止。 结果与讨论: 结果文件第一行是被试达到标准所用的遍数(不包括连续第一次就对的三遍)。其后的结果分三列印出:第一列是遍数;第二列为每遍中反应错的次数,如为0则表示这一遍第一次就做对了;第三列表示这一遍所用的时间,以毫秒为单位。 根据结果试说明被试概念形成的过程。 交叉参考:思维策略 参考文献: 杨博民主编心理实验纲要北京大学出版社 319-321页
华南理工大学《模式识别》大作业报告
华南理工大学《模式识别》大作业报告 题目:模式识别导论实验 学院计算机科学与工程 专业计算机科学与技术(全英创新班) 学生姓名黄炜杰 学生学号201230590051 指导教师吴斯 课程编号145143 课程学分2分 起始日期2015年5月18日
实验概述 【实验目的及要求】 Purpose: Develop classifiers,which take input features and predict the labels. Requirement: ?Include explanations about why you choose the specific approaches. ?If your classifier includes any parameter that can be adjusted,please report the effectiveness of the parameter on the final classification result. ?In evaluating the results of your classifiers,please compute the precision and recall values of your classifier. ?Partition the dataset into2folds and conduct a cross-validation procedure in measuring the performance. ?Make sure to use figures and tables to summarize your results and clarify your presentation. 【实验环境】 Operating system:window8(64bit) IDE:Matlab R2012b Programming language:Matlab
雷达目标识别
目标识别技术 2009-11-27 20:56:41| 分类:我的学习笔记| 标签:|字号大中小订阅 摘要: 针对雷达自动目标识别技术进行了简要回顾。讨论了目前理论研究和应用比较成功的几类目标识别方法:基于目标运动的回波起伏和调制谱特性的目标识别方法、基于极点分布的目标识别方法、基于高分辨雷达成像的目标识别方法和基于极化特征的目标识别方法,同时讨论了应用于雷达目标识别中的几种模式识别技术:统计模式识别方法、模糊模式识别方法、基于模型和基于知识的模式识别方法以及神经网络 模式识别方法。最后分析了问题的可能解决思路。 引言: 雷达目标识别技术回顾及发展现状 雷达目标识别的研究始于"20世纪50年代,早期雷达目标特征信号的研究工作主要是研究达目标的有效散射截面积。但是,对形状不同、性质各异的各类目标,笼统用一个有效散射面积来描述,就显得过于粗糙,也难以实现有效识别。几十年来,随着电磁散射理论的不断发展以及雷达技术的不断提高,在先进的现代信号处理技术条件下,许多可资识别的雷达目标特征信号相继被发现,从而建立起了相应的目标 识别理论和技术。 随着科学技术的飞速发展,一场以信息技术为基础、以获取信息优势为核心、以高技术武器为先导的军事领域的变革正在世界范围内兴起,夺取信息优势已成为夺取战争主动权的关键。电子信息装备作为夺取信息优势的物质基础,是推进武器装备信息化进程的重要动力,其总体水平和规模将在很大程度上反 映一个国家的军事实力和作战能力。 雷达作为重要的电子信息装备,自诞生起就在战争中发挥了极其重要的作用。但随着进攻武器装备的发展,只具有探测和跟踪功能的雷达也已经不能满足信息化战争的需要,迫切要求雷达不仅要具有探测和跟踪功能,而且还要具有目标识别功能,雷达目标分类与识别已成为现代雷达的重要发展方向,也是未来雷达的基本功能之一。目标识别技术是指:利用雷达和计算机对遥远目标进行辨认的技术。目标识别的基本原理是利用雷达回波中的幅度、相位、频谱和极化等目标特征信息,通过数学上的各种多维空间变换来估算目标的大小、形状、重量和表面层的物理特性参数,最后根据大量训练样本所确定的鉴别函数,在分类器中进行识别判决。目标识别还可利用再入大气层后的大团过滤技术。当目标群进入大气层时,在大气阻力的作用下,目标群中的真假目标由于轻重和阻力的不同而分开,轻目标、外形不规则的目标开始减 速,落在真弹头的后面,从而可以区别目标。 所谓雷达目标识别,是指利用雷达获得的目标信息,通过综合处理,得到目标的详细信息(包括物理尺寸、散射特征等),最终进行分类和描述。随着科学技术的发展,武器性能的提高,对雷达目标识别 提出了越来越高的要求。 目前,目标识别作为雷达新的功能之一,已在诸如海情监控系统、弹道导弹防御系统、防空系统及地球物理、射电天文、气象预报、埋地物探测等技术领域发挥出很大威力。为了提高我国的军事实力,适应未来反导弹、反卫、空间攻防、国土防空与对海军事斗争的需要,急需加大雷达目标识别技术研究的力度雷达目标识别策略主要基于中段、再入段过程中弹道导弹目标群的不同特性。从结构特性看,飞行中段
温度控制系统曲线模式识别及仿真
锅炉温度定值控制系统模式识别及仿真专业:电气工程及其自动化姓名:郭光普指导教师:马安仁 摘要本文首先简要介绍了锅炉内胆温度控制系统的控制原理和参数辨识的概念及切线近似法模式识别的基本原理,然后对该系统的温控曲线进行模式识别,而后着重介绍了用串级控制和Smith预估器设计一个新的温度控制系统,并在MATLAB的Simulink中搭建仿真模型进行仿真。 关键词温度控制,模式识别,串级控制,Smith预测控制 ABSTRACT This article first briefly introduced in the boiler the gallbladder temperature control system's control principle and the parameter identification concept and the tangent approximate method pattern recognition basic principle, then controls the curve to this system to carry on the pattern recognition warm, then emphatically introduced designs a new temperature control system with the cascade control and the Smith estimator, and carries on the simulation in the Simulink of MATLAB build simulation model. Key Words:Temperature control, Pattern recognition, Cascade control, Smith predictive control
模式识别实验最小错误率下的贝叶斯决策
《模式识别》实验报告题目:最小错误率贝叶斯决策
一、实验内容 1,实验原理 2,实验步骤 1)从iris.txt 文件(课程邮箱-文件中心)中读取估计参数用的样本,每一类样本抽出前40个,分别求其均值; (2)求每类样本的协方差矩阵、逆矩阵以及协方差矩阵的行列式; (3)对三个类别,分别取每组剩下的 10个样本,每两组进行分类。由于每类样本都相等, 且每类选取用作训练的样本也相等,在每两组进行分类时,待分类样本的类
先验概率为0.5。 将各个样本代入判别函数既公式(5),进行分类。 3,实验要求 (1)复习最小错误率贝叶斯决策原理,写出实验代码,实现对三类样本的分类; (2)计算分类的正确率,画出三维空间的样本分类图; (3)分析实验结果,完成实验报告。 二、实验代码 (1), clear % 原始数据导入 iris=load('iris.txt'); N=40;%每组取N=40个样本 %求第一类样本均值 for i = 1:N for j = 1:4 w1(i,j) = iris(i,j+1); end end sumx1 = sum(w1,1); for i=1:4 meanx1(1,i)=sumx1(1,i)/N; end %求第二类样本均值 for i = 1:N for j = 1:4 w2(i,j) = iris(i+50,j+1); end end sumx2 = sum(w2,1); for i=1:4 meanx2(1,i)=sumx2(1,i)/N; end %求第三类样本均值
for i = 1:N for j = 1:4 w3(i,j) = iris(i+100,j+1); end end sumx3 = sum(w3,1); for i=1:4 meanx3(1,i)=sumx3(1,i)/N; end (2), %求第一类样本协方差矩阵 z1(4,4) = 0; var1(4,4) = 0; for i=1:4 for j=1:4 for k=1:N z1(i,j)=z1(i,j)+(w1(k,i)-meanx1(1,i))*(w1(k,j)-meanx1(1,j)); end var1(i,j) = z1(i,j) / (N-1); end end %求第二类样本协方差矩阵 z2(4,4) = 0 ; var2(4,4) = 0; for i=1:4 for j=1:4 for k=1:N z2(i,j)=z2(i,j)+(w2(k,i)-meanx2(1,i))*(w2(k,j)-meanx2(1,j)); end ar2(i,j) = z2(i,j) / (N-1); end end %求第三类样本协方差矩阵 z3(4,4) = 0 ;
雷达原理大作业
雷达目标识别技术综述 1引言 目标识别是现代雷达技术发展的一个重要组成部分。对雷达目标识别的研究,在国内外已经形成热点,但由于问题本身的复杂性,以及多干扰信号,特别是多噪声干扰源存在的复杂电磁环境,雷达目标识别问题至今还没有满意的答案,尚无成熟的技术和方法。因此,对雷达目标识别技术的研究具有极其重要的军事应用价值。 本文将对雷达自动目标识别技术进行简要回顾,讨论目前理论研究和应用比较成功的几类目标识别方法,以及应用于雷达目标识别中的模式识别技术,分析和讨论问题的可能解决思路。 2雷达目标识别模型 雷达目标识别需要从目标的雷达回波中提取目标的有关信息标志和稳定特征并判明其属性。它根据目标的后向电磁散射来鉴别目标,是电磁散射的逆问题。利用目标在雷达远区所产生的散射场的特征,可以获得用于目标识别的信息,回波信号的幅值、相位、频率和极化等均可被利用。对获取的目标信息进行计算机处理,与已知目标的特性进行比较,从而达到自动识别目标的目的。识别过程分成三个步骤:目标的数据获取、特征提取和分类判决。相应模型如图"所示。 整个识别过程可以分为两个阶段:训练(或设计)阶段和识别阶段。前者用一定数量的训练样本进行分类器的设计或训练,后者用所设计或训练的分类器对待识别的样本进行分类决策。 训练数据获取是对各已知目标进行测量,取得目标的训练数据。测试数据获取是获得未知种类目标的测量数据;测量数据的获得可采用目标的靶场动态测量、外场静态测量、微波暗室缩比模型等。特征提取模块从目标回波数据中提取出对分类识别有用的目标特征信息。特征空间压缩与变换模块对特征信息进行特征空间维数压缩与变换,得到具有高同类聚合性的训练样本进行分类器的设计。类间可分离性的特征。分类器设计模块根据已知类别目标分类模块完成对未知目标的分类判决。 3雷达目标识别技术回顾 雷达目标识别的研究始于"#世纪$#年代。早期雷达目标特征信号的研究工作主要是研究雷达
模式识别作业--两类贝叶斯分类
深圳大学研究生课程:模式识别理论与方法 课程作业实验报告 实验名称:Bayes Classifier 实验编号:proj02-01 姓名:汪长泉 学号:2100130303 规定提交日期:2010年10月20日 实际提交日期:2010年10月20日 摘要:在深入掌握多维高斯分布性质,贝叶斯分类的基础上,用计算机编程实现一个分类两类模式样本的贝叶斯分类器。用matlab编程,并分析了实验结果,得出贝叶斯分类的一般结论。
1. 贝叶斯分类器 贝叶斯分类器的分类原理是通过某对象的先验概率,利用贝叶斯公式计算出其后验概率,即该对象属于某一类的概率,选择具有最大后验概率的类作为该对象所属的类。 1.1 两类情况 两类情况是多类情况的基础,多类情况往往是用多个两类情况解决的。 ① 用i ω,i =1, 2表示样本x (一般用列向量表示)所属的类别。 ② 假设先验概率()P ω1,()P ω2已知。(这个假设是合理的,因为如果先验概率未知,可以从训 练特征向量中估算出来,即如果N 是训练样本总数,其中有,N N 12个样本分别属于 2,1ωω,则相应的先验概率: ()/P N N ω≈11,2 ()/P N N ω≈2) ③ 假设(类)条件概率密度函数 (|),i p ωx i =1,2 已知,用来描述每一类中特征向量的分 布情况。如果类条件概率密度函数未知,则可以从可用的训练数据中估计出来。 1.2贝叶斯判别方法 贝叶斯分类规则描述为: 如果2(|)(|)P ωP ω>1x x ,则x ∈1ω 如果2(|)(|)P ωP ω<1x x ,则x ∈2ω (2-1-1) 贝叶斯分类规则就是看x ∈ω1的可能性大,还是x ∈2ω的可能性大。(|)i P ωx , i =1,2解释为当样本x 出现时,后验概率(|)P ω1x 和(|)P ω2x 的大小从而判别为属于 1ω或属于2ω类。 1.3三种概率的关系――――贝叶斯公式 ()() (|)= () i i i p |P P p ωωωx x x (2-1-3) 其中,()p x 是x 的概率密度函数(全概率密度),它等于所有可能的类概率密度函数乘以相应的先验概率之和。 ()(|)()i i i p p P ωω==∑2 1 x x
模式识别实验
《模式识别》实验报告 班级:电子信息科学与技术13级02 班姓名: 学号: 指导老师: 成绩:
通信与信息工程学院二〇一六年
实验一 最大最小距离算法 一、实验内容 1. 熟悉最大最小距离算法,并能够用程序写出。 2. 利用最大最小距离算法寻找到聚类中心,并将模式样本划分到各聚类中心对应的类别中。 二、实验原理 N 个待分类的模式样本{}N X X X , 21,,分别分类到聚类中心{}N Z Z Z , 21,对应的类别之中。 最大最小距离算法描述: (1)任选一个模式样本作为第一聚类中心1Z 。 (2)选择离1Z 距离最远的模式样本作为第二聚类中心2Z 。 (3)逐个计算每个模式样本与已确定的所有聚类中心之间的距离,并选出其中的最小距离。 (4)在所有最小距离中选出一个最大的距离,如果该最大值达到了 21Z Z -的一定分数比值以上,则将产生最大距离的那个模式样本定义为新增的聚类中心,并返回上一步。否则,聚类中心的计算步骤结束。这里的21Z Z -的一定分数比值就是阈值T ,即有: 102 1<<-=θθZ Z T (5)重复步骤(3)和步骤(4),直到没有新的聚类中心出现为止。在这个过程中,当有k 个聚类中心{}N Z Z Z , 21,时,分别计算每个模式样本与所有聚类中心距离中的最小距离值,寻找到N 个最小距离中的最大距离并进行判别,结果大于阈值T 是,1+k Z 存在,并取为产生最大值的相应模式向量;否则,停止寻找聚类中心。 (6)寻找聚类中心的运算结束后,将模式样本{}N i X i ,2,1, =按最近距离划分到相应的聚类中心所代表的类别之中。
中国地质大学(武汉)模式识别第四次实验:PCA
模式识别第四次实验 学号:20121001873 班学号:07512213 姓名:吴泽光 指导老师:马丽 中国地质大学(武汉)机械与电子信息学院 2015年4月
题目:基于PCA降维的遥感图像分类 实验目标: 1.掌握PCA算法原理 2.用MATLAB实现PCA,并进行结果分析。 实验内容: 1.采用INP数据(145*145*200),该数据有16个类别,PCA进行数据降维,然后对降维数据采用kNN分类(k=1)。 2.要求 (1)得到整个图像的降维结果,报告中画出前面5个主成分/波段的图像。 (2)分析参数:降维波段数量d(尝试下列7个取值:3,5,10,20,30,40,50)。随机10次选择train数据和test数据(例如30%train,70%test),得到这些train和test数据的pca降维结果,采用kNN分类,求出分类准确度OA。(注意,一共得到7*10个OA,7是指不同的d值,10是指10次实验,也就是每个d每次随机数据下都有一个分类结果OA)。对每个d值下的10个OA取平均,得到该d值下的分类准确度。最后画1个表格,给出7种不同d值下的分类结果。 d=3d=5d=10d=20d=30d=40d=50平均 OA (3)【选作optional】选择出最好OA所对应的d,然后在该d下,对全图进行1NN分类(1NN 作用在pca降维图像上),画出全图分类结果。 (4)和第三次上机的结果进行比较(数据不降维,直接采用kNN算法分类),看PCA降维的作用(对于kNN算法,PCA降维是因为信息损失而使得分类效果下降,还是PCA降维提高了分类效果)。 PCA算法原理: PCA算法的原理是设法将原来变量重新组合成一组新的互相无关的几个综合变量,同时根据实际需要从中可以取出几个较少的总和变量尽可能多地反映原来变量的信息的统计的方法,也是数学上处理降维的一种方法。 PCA算法步骤: 1、求出矩阵的协方差矩阵Cx; 2、对协方差矩阵进行特征值的分解[a,b]=eig(Cx); 3、找出最大的d个特征值对应的特征向量,组成一个新的矩阵I; 4、将原矩阵与新的矩阵I相乘,实现数据降维。
7基于神经网络的模式识别实验要求
实验七基于神经网络的模式识别实验 一、实验目的 理解BP神经网络和离散Hopfield神经网络的结构和原理,掌握反向传播学习算法对神经元的训练过程,了解反向传播公式。通过构建BP网络和离散Hopfield 网络模式识别实例,熟悉前馈网络和反馈网络的原理及结构。 二、实验原理 BP学习算法是通过反向学习过程使误差最小,其算法过程从输出节点开始,反向地向第一隐含层(即最接近输入层的隐含层)传播由总误差引起的权值修正。BP网络不仅含有输入节点和输出节点,而且含有一层或多层隐(层)节点。输入信号先向前传递到隐节点,经过作用后,再把隐节点的输出信息传递到输出节点,最后给出输出结果。 离散Hopfield神经网络的联想记忆过程分为学习和联想两个阶段。在给定样本的条件下,按照Hebb学习规则调整连接权值,使得存储的样本成为网络的稳定状态,这就是学习阶段。联想是指在连接权值不变的情况下,输入部分不全或者受了干扰的信息,最终网络输出某个稳定状态。 三、实验条件 Matlab 7.X 的神经网络工具箱:在Matlab 7.X 的命令窗口输入nntool,然后在键盘上输入Enter键,即可打开神经网络工具箱。 四、实验内容 1.针对教材P243例8.1,设计一个BP网络结构模型(63-6-9),并以教材图8.5 为训练样本数据,图8.6为测试数据。 (1)运行train_data.m和test_data.m文件,然后从Matlab工作空间导入(Import)训练样本数据(inputdata10,outputdata10)和测试数据(testinputdata,testoutputdata),其次新建一个神经网络(New Network),选择参数如下表1,给出BP神经网络结构图。
模式识别与智能系统研究生培养方案
研究生培养方案 学科专业:模式识别与智能系统代码: 081104 一、培养目标 培养德、智、体全面发展,在模式识别与智能系统领域具有创新精神的高层次科学研究与工程技术人才。具体要求: 1.学习马列主义、毛泽东思想和邓小平理论,坚持四项基本原则,热爱祖国。 2.具有良好的团结协作和奉献精神,有严谨的治学态度和开拓创新精神。 3.掌握本专业基础理论知识,掌握科学研究的基本方法,具有较强的独立从事科学研究和应用开发能力,了解国内外本学科的学术动态和最新研究成果。 二、研究方向 1.智能系统理论与技术 2.模式识别 3.人机交互与虚拟现实 4.智能传感系统 5.智能机器人系统与信息处理 三、培养年限 本专业学制为三年,在校最长年限(含休学)为4年。其中理论学习在第一、二学期进行,论文开题在第三学期进行。科学研究、撰写论文及论文答辩的时间不少于一年半。 四、课程设置及学分要求 本专业硕士研究生的课程设置分必修课和选修课两类(见附表),其中公共课和学位课为必修课。实行学分制,至少修满30个学分,其中必修课不少于18个学分。提倡研究生以本方向的课程为主体,同时在导师指导小组的指导下,选择一些以拓宽知识面、提高实践能力为目的的相关学科课程。对于跨学科专业学习的研究生应根据研究方向补修相应的本科生课程,补修课程不计学分。 五、研究选题 研究生应在导师指导小组指导下,广泛查阅相关文献资料,了解国内外发展动态,在开展探索性研究工作的基础上进行选题。学位论文题目选定后,应撰写开题报告。经审核批准后,在导师指导下按计划开展课题研究。 论文选题应有一定的前沿性和新颖性,符合本专业的研究方向,对本学科发展和国民经济建设具有一定的理论意义和应用价值。 六、培养方式 1.研究生入学后一个月内,由导师指导小组制定出全面的培养实施计划。 2.研究生应积极参加导师所在系(研究所)的政治学习和业务活动。 3.研究生应掌握扎实的基础理论和系统的专业知识;课程学习与科学研究并重,着重培养解决实际问题的能力。 4.研究生必须参加一定的学术研讨和教学实践活动,以培养其组织、协调、
《人工智能及其应用》实验指导书
《人工智能及其应用》 实验指导书 ( 浙江工业大学计算机科学与技术学院—人工智能课程组 2011年9月 )
前言 本实验是为了配合《人工智能及其应用》课程的理论学习而专门设置的。本实验的目的是巩固和加强人工智能的基本原理和方法,并为今后进一步学习更高级课程和信息智能化技术的研究与系统开发奠定良好的基础。 全书共分为八个实验:1.产生式系统实验;2.模糊推理系统实验;*算法求解8数码问题实验;*算法求解迷宫问题实验;5.遗传算法求解函数最值问题实验;6.遗传算法求解TSP问题实验;7.基于神经网络的模式识别实验;8.基于神经网络的优化计算实验。每个实验包括有:实验目的、实验内容、实验条件、实验要求、实验步骤和实验报告等六个项目。 本实验指导书包括两个部分。第一个部分是介绍实验的教学大纲;第二部分是介绍八个实验的内容。 由于编者水平有限,本实验指导书的错误和不足在所难免,欢迎批评指正。 人工智能课程组 2011年9月
目录 实验教学大纲 (1) 实验一产生式系统实验 (3) 实验二模糊推理系统实验 (5) 实验三 A*算法实验I (9) 实验四 A*算法实验II (12) 实验五遗传算法实验I (14) 实验六遗传算法实验II (18) 实验七基于神经网络的模式识别实验 (20) 实验八基于神经网络的优化计算实验 (24)
实验教学大纲 一、学时:16学时,一般安排在第9周至第16周。 二、主要仪器设备及运行环境:PC机、Visual C++ 、Matlab 。 三、实验项目及教学安排 序号实验名称实验 平台实验内容学 时 类型教学 要求 1产生式系统应用VC++设计知识库,实现系统识别或 分类等。 2设计课内 2模糊推理系统应用Matlab1)设计洗衣机的模糊控制器; 2)设计两车追赶的模糊控制 器。 2验证课内 3A*算法应用I VC++设计与实现求解N数码问题的 A*算法。 2综合课内4A*算法应用II VC++设计与实现求解迷宫问题的A* 算法。 2综合课内5遗传算法应用I Matlab1)求某一函数的最小值; 2)求某一函数的最大值。 2验证课内6遗传算法应用II VC++设计与实现求解不同城市规模 的TSP问题的遗传算法。 2综合课内 7基于神经网络的模式识别Matlab1)基于BP神经网络的数字识 别设计; 2)基于离散Hopfiel神经网络 的联想记忆设计。 2验证课内 8基于神经网络的 优化计算 VC++设计与实现求解TSP问题的连2综合课内 四、实验成绩评定 实验课成绩单独按五分制评定。凡实验成绩不及格者,该门课程就不及格。学生的实验成绩应以平时考查为主,一般应占课程总成绩的50%,其平时成绩又要以实验实际操作的优劣作为主要考核依据。对于实验课成绩,无论采取何种方式进行考核,都必须按实验课的目的要求,以实际实验工作能力的强弱作为评定成绩的主要依据。 评定各级成绩时,可参考以下标准:
数字图像处理实验八图像匹配-------模板匹配
课程名称数字图像处理 实验序号实验八 实验项目图像匹配-------模板匹配实验地点实验学时实验类型 指导教师实验员 专业班级 学号姓名 年月日
成绩: 教 师 评 语 一、实验目的及要求 在机器识别物体的过程,常需把不同传感器或同一传感器在不同时间,不同成像条件下对同一景物获取的两幅或多幅图像在空间上对准,或根据已知模式到另一幅图中寻找相应的模式,这就叫做匹配。模板匹配是一种最原始、最基本的模式识别方法。 利用模板匹配可以在一幅图像中找到已知的物体。这里的模板指的是一幅待匹配的图像,相当于模式识别的模式。基本要求如下: (1).进行匹配的两幅图像为JPG格式或BMP格式。 (2).能够进行对两幅数字图像的匹配。 (3)采用交互式程序对图像进行匹配。 二、实验原理与内容 模板匹配是指用一个较小的图像,即模板与源图像进行比较,以确定在源图像中是 否存在与该模板相同或相似的区域,若该区域存在,还可确定其位置并提取该区域。 模板匹配常用的一种测度为模手术台与源图像对应区域的误差平方和。设f(x,y)为M×N的源图像,t(j,k)为J×K(J≤M,K≤N)的模板图像,则误差平方和测度定义为: DS(x,y)称为源图像中与模板对应区域的能量,它与像素位置(x,y)有关,但随像素位置(x,y)的变化,DS(x,y)变化缓慢。DST(x,y)模板与源图像对应区域的互相关,它随像素位置(x,y)的变化而变化,当模板t(j,k)和源图像中对应区域相匹配时取最大值。DT(x,y)称为模板的能量,它与图像像素位置(x,y)
无关,只用一次计算便可。显然,计算误差平方和测度可以减少计算量。 基于上述分析,若设DS(x,y)也为常数,则用DST(x,y)便可进行图像匹配,当DST(x,y)取最大值时,便可认为模板与图像是匹配的。但假设DS(x,y)为常数会产生误差,严重时将无法下确匹配,因此可用归一化互相关作为误差平方和测度,其定义为: 模板匹配的示意图如图图2.1所示,其中假设源图像f(x,y)和模板图像t(k,l)的原点都在左上角。对任何一个f(x,y)中的(x,y),根据上式都可以算得一个R(x,y).当x和y变化时,t(j,k)在源图像区域中移动并得出R(x,y)所有值。R(x,y)的最大值指出了与t(j,k)匹配的最佳位置,若从该位置开始在源图像中取出与模板大小相同的一个区域,便可得到匹配图像。 有关函数注释: 1imwrite函数
模式识别课程试验教学大纲
《模式识别》课程实验教学大纲 一、制定实验教学大纲的依据 根据本校《2004 级本科指导性培养计划》和《模式识别》课程教学大纲制定。 二、本实验课在专业人才培养中的地位和作用 《模式识别》 课程是电子信息工程专业与自动化专业教学计划中以应用为基础的一门专 业选修课,是研究如何用机器去模拟人的视觉、听觉、触觉以识别外界环境的理论与方法, 其主要任务是使学生获得如何对对象进行分类的有关理论和方法方面的知识。 实验课是本课 程重要的教学环节,其目的是使学生掌握统计模式识别的基本分类方法的算法设计及其验证 方法,通过设计性实验的训练,以提高学生设计算法及数值实验的能力,进一步提高分析问 题、解决问题的能力。 三、本实验课讲授的基本实验理论 1、非监督参数估计的基本原理; 2、比较监督参数估计、非监督参数和非参数估计三种样本集估计概率密度方法的差异; 3、用 Parzen 窗法进行总体分布非参数估计的原理; 4、Kn 近邻法进行总体分布非参数估计的原理; 5、感知器算法的基本思想; 6、应用感知器算法实现线性可分样本的分类方法; 四、本实验课学生应达到的能力 1、掌握根据概率密度用 MATLAB 生成实验数据的原理和方法; 2、掌握用 Parzen 窗法和 Kn 近邻法进行总体分布的非参数估计方法,以加深对非参数 估计基本思想的认识和理解; 3、通过自编程序和程序运行结果,说明 Parzen窗法和 Kn 近邻法各自的优缺点; 4、掌握根据已知类别的样本用感知准则进行线性判别函数设计的方法; 5、通过编制程序,实现感知器准则算法,并实现线性可分样本的分类; 6、掌握高维特征空间向低维特征空间转换的 Fisher准则的原理与方法; 7、通过编制程序并上机运行体会 Fisher 线性判别的基本思路,理解线性判别的基本思 想,掌握 Fisher 线性判别问题的实质。 五、学时、教学文件
模式识别课程实验报告
模式识别课程实验报告 学院 专业 班级 姓名 学号 指导教师 提交日期
1 Data Preprocessing The provide dataset includes a training set with 3605 positive samples and 10055 negative samples, and a test set with 2043 positive samples and 4832 negative samples. A 2330-dimensional Haar-like feature was extracted for each sample. For high dimensional data, we keep the computation manageable by sampling , feature selection, and dimension reduction. 1.1 Sampling In order to make the samples evenly distributed, we calculate the ratio of negative samples and positive samples int test set. And then randomly select the same ratio of negative samples in training set. After that We use different ratios of negative and positive samples to train the classifier for better training speed. 1.2 Feature Selection Univariate feature selection can test each feature, measure the relationship between the feature and the response variable so as to remove unimportant feature variables. In the experiment, we use the method sklearn.feature_selection.SelectKBest to implement feature selection. We use chi2 which is chi-squared stats of non-negative features for classification tasks to rank features, and finally we choose 100 features ranked in the top 100. 2 Logistic regression In the experiment, we choose the logistic regression model, which is widely used in real-world scenarios. The main consideration in our work is based on the binary classification logic regression model. 2.1 Introduction A logistic regression is a discriminant-based approach that assumes that instances of a class are linearly separable. It can obtain the final prediction model by directly estimating the parameters of the discriminant. The logistic regression model does not model class conditional density, but rather models the class condition ratio.