低空突防航路规划算法综述

第19卷第10期2007年5月
系统仿真学报@
JournalofSystemSimulation
Vbl.19No.10
May,2007低空突防航路规划算法综述
叶文,朱爱红,范洪达
(海军航空工程学院兵器科学与技术系,烟台264001)
摘要:低空突防在现代战争中发挥着越来越重要的作用,其中航路规划是新一代低空突防技术的关键技术之一。分析了低空突防航路规划算法应满足的条件及其特点,阐述了目前国内外正在应用和研究的几种航路规划算法:动态规划法、电势理论法、启发式A术搜索法、遗传算法、蚁群算法、元胞自动机等。对低空突防航路规划算法的发展方向进行了简要的总结。
关键词:航路规划;动态规划;遗传算法;蚁群算法;元胞自动机
中图分类号:V249文献标识码:A文章编号:1004—731X(2007)10—2357—05
SurveyofRoutePlanningofLowAltitudePenetration
YEWen,ZHUAi-hong,FANHong—da
(DepartmentofOrdnanceScienceandTechnology。NavalAeronauticEngineerAcademy,Yantai264001,China)
Abstract:Thelowaltimdepenetrationplayedamoreandmoreimportantroleinmodemwar,androuteplanningISoneofthekeytechnologiesoflowaltitudepenetration.Theconditionsthatshouldbemetandthepropertiesofrouteplanningoflowaltitudepene廿afionwereanalyzed.Variousmethodswereillustratedwhicharebeingusedandbeingresearchedbothhomeandoverseasatthepresenttime,suchasdynamicprogrammingmethod,thepotentialtheory,theA木search,geneticalgorithm,antcolonyalgorithm,cellularautomata,etc.Atlast,thedevelopmenttendenciesofrouteplanningalgorithmforthelowaltitudepenetrationtechnologyweresummarized.
Keywords:trajectoryoptimization;dynamicprogramming;geneticalgorithm;antcolonyalgorithm;cellularautomata
引言
航路规划是指在特定约束条件下,寻找运动体从初始点到目标点并且满足某种性能指标最优的运动轨迹[1-2]。它研究的对象涉及到空中、陆地、水面以及水下各种运行器,这种技术已被广泛应用于军用飞机低空突防,民航运输、机器人作业、灾难救援等各个领域。军用飞机航路规划是以实现地形跟随、地形回避和威胁回避飞行为目的的新一代低空突防技术,其目的就是要利用地形和敌情等信息,规划出生存概率最大的飞机突防航路。在防空技术日益完善的现代战争中,航路规划是提高飞机的作战效能,实施远程精确打击的有效手段。
80年代以来,美、英、德等国在战术飞行的航路规划方面进行了不断的研究,在该领域已经做了大量的工作。研究的航路规划算法主要有:最速下降法、动态规划法、样条插值法、神经网络法、启发式A+搜索法、模拟退火法、电势理论法、遗传算法等,上述这些方法所要解决的问题都是大范围航路规划过程中巨大的信息存储量和全局最优之间的矛盾,在这方面仍然还有许多工作要做。本文主要介绍了目前国内外正在应用和研究的几种航路规划算法,并且对飞机低空突防航路规划算法的发展方向进行了简要的总结。
收稿日期l2006—03—31tJ回日期l2007.03—05
作者简介:叶文(1979一),男,安徽黄山人,讲师,博士,研究方向为武器系统与运用工程、低空突防、航路规划。l航路规划算法分析
影响航路规划的主要因素有:敌防空体系的构成;飞行区域的地形变化;飞机的机动性能及作战半径限制等。因此飞行航路规划需要在各种因素之问进行权衡。突防航路规划通常分为两个层次进行:第一层为整体航线规划,或者称为任务层次的航路规划;第二层为航迹的动态优化,或者称为战术层次的航路规划【34】。
整体航线规划是飞行前在地面上进行的,依据预先确定的性能指标为标准,通过优化算法生成一条最优参考航线。通过对航线整体规划,保证以下要求:(1)突防航线满足战略要求。(2)提高战机突防生存能力。利用地面大型计算机的处理能力和允许长时间计算的条件,综合考虑诸多因素,规划出整体优化的参考航线,避免最优过程的局部性。(3)减少数据存储量和机载计算机的计算量。(4)弥补机载设备区域上的局限性。整体参考航线的规划涉及全局优化,需要处理长距离、多种信息的大量数据,因此存在的主要问题是优化方法要避免局部最优并且要解决减少计算量的问题。目前关于整体航线规划的主要方法有:Am搜索算法、动态规划算法、模拟退火算法、电势理论算法等。
航迹动态优化就是飞机在飞行中,以整体航线规划得到的航线为参考,依据最新的威胁信息、地形信息等因素,动态地生成最优航迹并沿着最优航迹飞行。航迹的动态优化主要是为了:(1)提高飞机对于周围情况的机动反应能力,及时回避新的威胁。(2)使突防航迹更加精确和可行。(3)增
第19卷第10期
2007年5月系统仿真学报Vil.19No.10
May,2007
强抗干扰能力,提高低空突防任务成功率。最优航迹生成的过程就是以整体航线规划得到的航线为参考,动态计算一条最优的参考飞行航迹。因为参考航迹已经保证了飞行航迹的全局最优特性,因此最优飞机航迹产生过程是使用一定范围的局部信息进行小范围优化的过程,即计算出飞机前方将要飞过的一个小区域内的参考航迹。在低空突防飞行中进行航迹动态优化算法时,如果从安全余度考虑,每次规划航迹长度要尽量长。而为了提高飞行器的机动反应能力和跟踪航迹的精确性,需要尽量缩短每次航迹规划时间。因此航迹动态优化算法需要解决的重点是减少计算时间以确保实时性。目前关于航迹动态优化的主要方法有:可行性方法算法、最速下降算法、Dynapath算法等。
2几种航路规划算法简述
2.1动态规划法
动态规划是一类多阶段决策过程的最优化方法。动态规划方法是对于存在多个空中封锁和地面障碍等多约束的情况下,采用航路图分类法进行航路规划。飞机根据约束,在有限的探测和处理范围内,根据不同的滚转角度,得到下一时刻飞机可能到达的位置,并在新的飞行点上,计算再下一时刻的位置,从此类推,得到一棵航路数,比较树枝终点的性能指标并找到代价最小的节点,反向搜索其父节点,得到最优航路(见图1)。因为动态规划具有维数爆炸特性,如果在大范围内进行动态搜索计算机无法处理大量的信息,因此在一定范围内搜索,但这样结果会得不到全局最优航路,这就必须两者权衡考虑。不过动态规划法模型简单,对地形要求不高,算法不依赖于威胁场的连续性,容易实现。
弋掣少
@\——L/◎K.。^
r墨_
‘⑨
024681012
图1动态规划法航路图
文献[5】提出了一种基于安全走廊的水平面动态规划法。文献[6】提出了动态规划结合树形搜索法也较好地解决了“维数灾难问题”。他们将滚转角离散为五个量,对由此产生的五个转弯曲率值进行穷举搜索,这样生成一棵轨迹树,不断对轨迹树进行修剪可以抑制维数膨胀。
2.2电势理论法
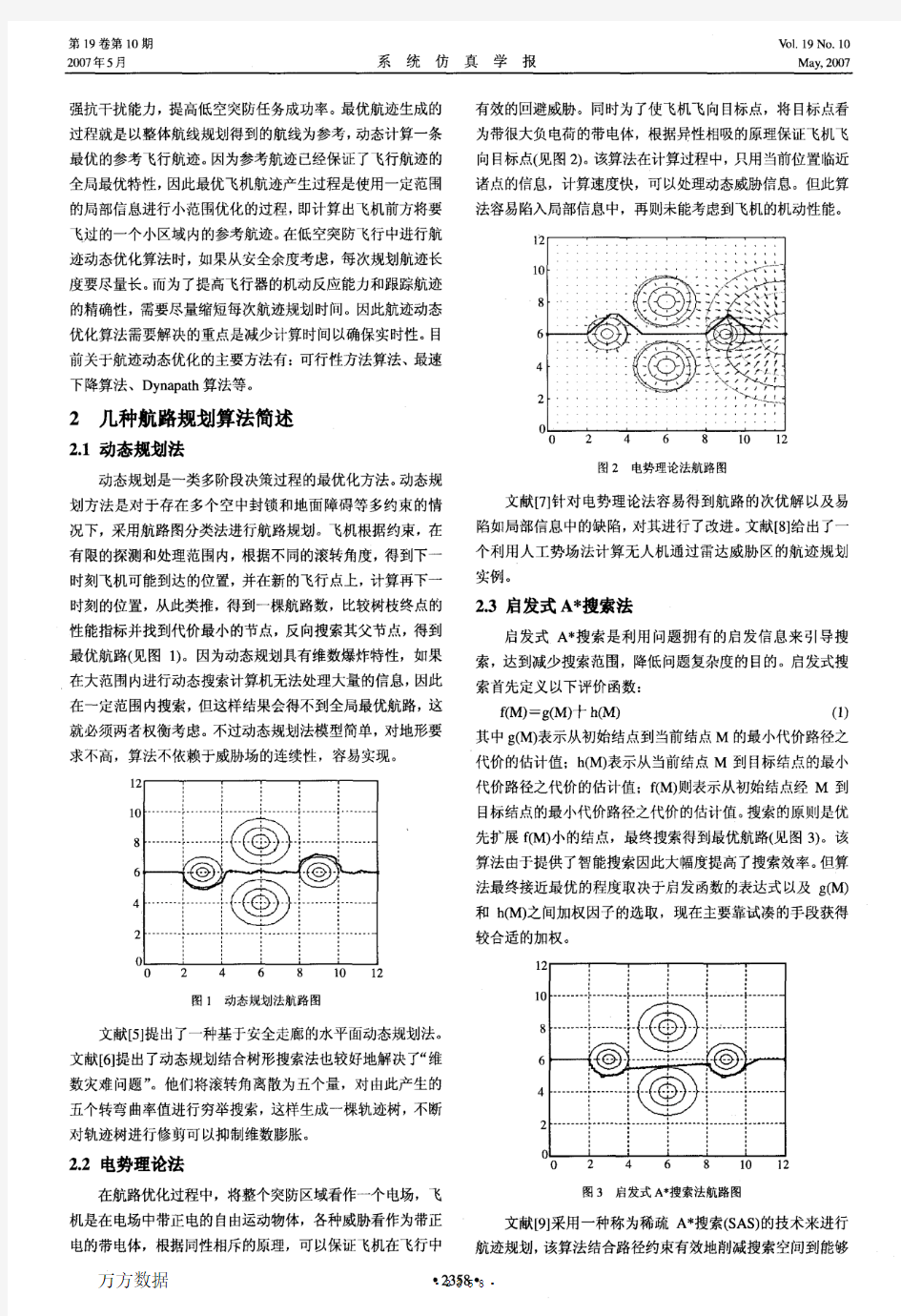
在航路优化过程中,将整个突防区域看作一个电场,飞机是在电场中带正电的自由运动物体,各种威胁看作为带正电的带电体,根据同性相斥的原理,可以保证飞机在飞行中有效的回避威胁。同时为了使飞机飞向目标点,将目标点看为带很大负电荷的带电体,根据异性相吸的原理保证飞机飞向目标点(见图2)。该算法在计算过程中,只用当前位置临近诸点的信息,计算速度快,可以处理动态威胁信息。但此算法容易陷入局部信息中,再则未能考虑到飞机的机动性能。
图2电势理论法航路图
文献【7]针对电势理论法容易得到航路的次优解以及易陷如局部信息中的缺陷,对其进行了改进。文献【8]给出了一个利用人工势场法计算无人机通过雷达威胁区的航迹规划实例。
2.3启发式A=l:搜索法
启发式A。搜索是利用问题拥有的启发信息来引导搜索,达到减少搜索范围,降低问题复杂度的目的。启发式搜索首先定义以下评价函数:
f(M)=g(M)十h(M)(1)其中g(M)表示从初始结点到当前结点M的最小代价路径之代价的估计值;h(M)表示从当前结点M到目标结点的最小代价路径之代价的估计值;f(M)贝Jj表示从初始结点经M到目标结点的最小代价路径之代价的估计值。搜索的原则是优先扩展f(M)小的结点,最终搜索得到最优航路(见图3)。该算法由于提供了智能搜索因此大幅度提高了搜索效率。但算法最终接近最优的程度取决于启发函数的表达式以及g(M)和h(M)之间加权因子的选取,现在主要靠试凑的手段获得较合适的加权。
孤
穗巡∥
@,
蓬爹7勰
”蟛‘
O24681012
图3启发式At搜索法航路图
文献[9】采用一种称为稀疏A*搜索(SAS)的技术来进行航迹规划,该算法结合路径约束有效地削减搜索空问到能够
2007年5月叶文,等:低空突防航路规划算法综述May,2007
实时收敛并得到满足要求的解,但它只是在二维平面进行航迹搜索。文献【10】在SAS的基础上,提出了一种实时三维航迹规划的方法,该方法充分利用地形的高程信息,可有效地进行地形回避和威胁回避。
2.4动态规划切线法
文献【11】提出了一种基于动态规划切线法的航路规划。如图3所示,在基地A与目的地B之间有1个威胁区。线段AB经过威胁区1,则做Aa,Ac,bB,dB切圆1,切点a,b,C,d为A与B之间的各级节点。再计算出线段Aa,Ac,bB,dB和弧线ab,cd的长度作为节点代价。如假设bB经过威胁区2,则对线段bB还要继续采用上述的方法作切线求出下一级节点及其节点代价。需要注意的是:(1)在每一步对线段所经过的威胁区做切线时不必对每个经过的威胁区都作切线,只对最左边的威胁区作切线,然后再判断切线段是否经过威胁区;(2)在多个威胁区有重叠部分时看成一个整体作切线;(3)在针对基地A与目的地B之间的威胁区进行航路规划时需要确定航迹的上限,方法为对A,B之间最外围的威胁区作最外边的切线,再把这些切点和切线段、圆弧的长度作为节点及节点代价与采用前面的方法所得到的节点及节点代价一起构成一棵航迹树,其目的是确保参考航迹的全局最优。
ab
图4E行区域不意图
确定各级节点及各节点代价,其最终目的是得到一棵从基地至目的地的航迹树,这棵树与别的树不同之处在于它的树枝全都汇集一点(目的地)。根据递推方程比较树枝端点的性能指标并找到代价最小的节点,反向搜索其父节点,一直追溯到初始节点,最后可得到一条最优参考航迹,如图5所示。该算法搜索速度快,但是航路由直线段和弧线组成,是否满足飞机的机动性能有代验证。
,簿孓j
z::£缪≤o≤二。瑟蕊.、
譬掣.1}|,,丰\i‘o芝::’z’
o、_≮一
、\j/7
024681012
图5动态规划切线法航路图2.5遗传算法
遗传算法提供了一种求解复杂问题的通用框架,它仿效生物的遗传和进化,根据“生存竞争、优胜劣汰”的原则,借助复制、杂交、变异等操作,使所要解决的问题从初始解一步步逼近最优解。其五个要素包括:染色体编码、初始群体、适应度函数、遗传操作和控制参数,很多学者[12-141都将遗传算法用于飞行器的航迹规划求解。
文献[12]选择角频率分别为w0,w1,.,K。幅值分别为a。,a。..,a。,的一组正弦波描述一条可能的飞行航路。将飞行航路描述为:
f(x)=aosin(wox)+alsin(wlx)+…+a。一1sin(w.一l工)(2)在角频率组固定的情况下,使用幅值组构造一条染色体,其基因位置表示对应的角频率,数值代表相应的幅值。应用该型染色体构造方法进行遗传搜索得到的优化航路如图6所示。该算法计算速度快,得到的航路满足飞机机动性能,无须再进行平滑处理,所得航路能够严格经过起始点和目标点。但是容易产生早熟现象,不能得到最优解。
~“Q:”
\i:。《舅紊’,’’’*I、
.4-Jo.1~
-二≥-...二㈤≥
n
24681012
图6遗传算法航路图
文献[13】以{爬升、转弯、速度}组成染色体,每个量都有三个取值,适应度函数由距离代价、路径代价、危险代价、惩罚代价和范围代价组成,变异操作采用了一种“目标偏差变异”,实际上类似于自适应变异,从而实现了遗传算法路径规划。文献[141以路径点的集合组成染色体,每个路径点由到目标的距离、与目标的方位角和高低角组成,采用最优个体保护和分布式计算,并对每一代结果进行Bezier曲线调整。2.6蚁群算法
蚁群算法是一种源于大自然生物世界的新型仿生类算法,是于20世纪90年代初由意大利学者Dofigo和Maniezzo等首先提出,在一系列复杂困难的系统优化问题求解中取得了成效,显示出该算法在求解复杂优化问题特别是离散优化问题方面的一些优越性.目前,不少学者[15-171将蚁群算法应用于飞行器的航路规划当中,并且显示了一定的优越性。
研究表明,蚂蚁具有找到蚁巢与食物之间的最短路径的能力。这种能力是靠其在所经过的路径上留下一种挥发性分泌物pheromone(称为信息素,该物质随着时间的推移会逐渐挥发消失)来实现的。蚂蚁在一条路上前进时,会留下挥发6
4
2
O
o
4
石
2007年5月系统仿真学报May,2007
性信息素,后来的蚂蚁选择该路径的概率与当时这条路径上
该物质的强度成正比。对于一条路径,选择它的蚂蚁越多,
则在该路径上蚂蚁所留下的信息素的强度就越大,而强度大
的信息素会吸引更多的蚂蚁,从而形成一种正反馈。通过这
种正反馈,蚂蚁最终可以发现最短路径。
如图7所示,将可行飞行区域进行网格化,将线段AB
进行m等分,在每个等分点作AB的垂线,就得到线段L,,
k,…,L。小再以x轴为中心,将每条线段进行2n等分,
每条垂线上就有(2n+1)个点。可行飞行区域内就有(m一1)×
(2n+1)个路径点,Li(xi,y{)表示第i条垂线上的第J点,则
从起始点A到终点B的航路可以表示为:
Path={S,LI(X1,Ykl),L2(x2,Yk2),…,Lm.1(xm-1,yk(m.1)),G}
(k;=1,2,…,2n+1)(3)
A
P巩月弋厶JL1
。\
≯’、
』
/。
^\
.,一,
、
}kKi’’廿)
I
7
≯
\./
图7飞行区域示意图
首先对飞机飞行区域的网格图上所有节点给出合适的初始值,形成初始信息素矩阵T,在这里,我们设定威胁区域内的节点处的初始值为0,其余各节点的初始值为一常数c,这样威胁区域内的各节点处就无气味,搜索蚂蚁将不会到达该点,因此蚂蚁只会在安全区域内进行搜索,这样搜索得到的航路就很好的回避了威胁。接着将蚂蚁全部放在起始点,一起同时向目标方向行进,最终到达目标点。每只蚂蚁在行进中运用状态转移规则在其可能到达的下一垂线上各节点集合中进行选择,在选择时还可以适当添加一些启发式规则,如在相同值下可优先选择偏离航路方向较小的节点。假设蚂蚁从垂线段Li上的节点a到下一个垂线段Li+1上任意节点b的时问相等,与距离无关,那么全部蚂蚁将同时到达目标点,同时完成一次循环。当所有的蚂蚁都搜索完到达目标点后,依据各只蚂蚁搜索得到的可行航路的目标函数,对其上各节点进行全局信息素更新,对没有经过的各节点只是进行信息素挥发,重复这个过程,直到求出优化航路,如图8所示。该算法能够进行全局最优搜索,但是搜索速度不快。再者参数的设定比较困难,一般用试凑法。
2.7元胞自动机方法
元胞自动机模型(CellularAutomatonModel)又叫细胞(或元胞,或单元)自动机模型。自从VonNeuman六十年代提出元胞自动机模型后,其研究一直停滞了十余年,直到1970年J.H.Conway编制了一个名为“生命游戏”的游戏程
图8蚁群算法航路图
序后才再次掀起。特别是从八十年代起,元胞自动机的理论研究出现了新的进展,科学家们成功的利用这个模型在简单规则下使系统涌现出了吸引子、分叉、自组织和白复制等现象,这一研究结果使得元胞自动机成为研究复杂系统的重要工具。文献[18】将元胞自动机模型应用于飞机的航路规划。
元胞自动机是由分布在规则网格中的每一个元胞取有限的离散状态,遵循确定的局部规则做出同步更新,即大量元胞通过简单的局部相互作用而构成的动力系统。元胞自动机由元胞、元胞的状态空问、邻居及局部规则四部分组成。
将飞行区域进行网格化,每一个网格对应于元胞自动机的一个元胞,建立元胞自动机模型。此元胞自动机模型为平面的,即为二维模型,采用正方形网格排列元胞,元胞的邻居模型选择Moore型,这个选择的结果正好也离散化了飞机航向的八个基本方向。将飞机看为一个位于元胞中心的点,在元胞空间中运动。飞机位置由向量(x,Y,0)决定,其中x,Y是飞机所在元胞的坐标,0为飞机在该点的航向,即飞机离开元胞的驶出角。由于飞机的机动性能约束,当飞机以一定的进入角方向到达某一元胞时,飞机在该元胞处的驶出航向是受限制的,在这里我们设定飞机的航向偏转变化不可大于等于90。。当飞机以航向cd到达元胞d后,飞机离开元胞d的可能航向只能是D(d),如图9所示。现在航路动态优化问题变成在元胞空间里,搜索出连接包含起始点的元胞和包含目标点的元胞的一系列连续的元胞,并且其满足一定的约束条件(例如飞机机动
性能、回避威胁、航程最短
等),最后将每个元胞的中间
点进行连接构成一条动态优
化航路,如图10和图11所示。
该算法搜索的速度快,计算时
间短,能够进行实时优化。由
于将飞机滚转角离散为八个
方向,因此所得航路不平滑。
C
q..._..
鼍./
吣_._
七..1■÷.
D(d)
图9运动方向示意图
3航路规划算法发展方向
飞机航路规划问题的目标函数复杂,而且其是衡量航路最优性的优化指标。这些指标包括:有效躲避火力威胁、可以进行地形回避/跟踪、有效完成任务等。航路规划的约束条件较多,包括燃料约束、飞行时间限制、飞机机动性能要
2007年5月叶文,等:低空突防航路规划算法综述May,2007
图10元胞自动机算法模型图的问题。
总之,航迹规划的发展方向是多种算法的结合。既有大
范围的规划算法,可在所知信息下求得全局最优解;又有小
范围的规划算法,可在飞行器上进行实时修改;既能进行人
为的智能规划,又能在一定范围内进行模型的自动求解。
参考文献:
【1】闵昌万,袁建平.军用飞行器航迹规划综述【J】.飞行力学,1998,16(4):14—19.
【2】李清.综合低空飞行与突防技术研究[D】.南京航空航天大学,1998.
[3]叶文.飞机低空突防航路规划及其仿真技术研究【D】.海军航空工程学院,2004.
[4】马向铃.飞机编队低空突防航路规划技术研究[D】.海军航空工程学院,2005.
【5】闵昌万.飞行器航迹规划与轨迹控制研究p】.西北工业大学,1999.[6】袁卫东,李清,王建平.一种新的综合TDTA最优航迹算法【J】
(上接第2331页)
ElevatorVibrationControl[C],/IEEEIndustryApplicationSocietyAnnualMeeting.Louisian:NewOdeans.1997.
[5]李华德.交流调速控制系统[M].北京:电子工业出版社,2003.[6】LeeYoung-Min,KangJun-Koo,Su!Seung-Ki.Accelerationfeedback
control
strategy
forimprovingridingqualityofelevatorsystem[C]#IEEEIndustryapplicationsconference.1999.
[7】张福恩,吴乃优,张金陵,等.交流调速电梯原理、设计及安装维修[M】.北京:机械工业出版社,1991.
低空突防航路规划算法综述
作者:叶文, 朱爱红, 范洪达, YE Wen, ZHU Ai-hong, FAN Hong-da
作者单位:海军航空工程学院兵器科学与技术系,烟台,264001
刊名:
系统仿真学报
英文刊名:JOURNAL OF SYSTEM SIMULATION
年,卷(期):2007,19(10)
被引用次数:6次
参考文献(18条)
1.闵昌万.袁建平军用飞行器航迹规划综述[期刊论文]-飞行力学 1998(04)
2.李清综合低空飞行与突防技术研究[学位论文] 1998
3.叶文飞机低空突防航路规划及其仿真技术研究 2004
4.马向铃飞机编队低空突防航路规划技术研究 2005
5.闵昌万飞行器航迹规划与轨迹控制研究[学位论文] 1999
6.袁卫东.李清.王建平一种新的综合TF/TA最优航迹算法 1996(04)
7.李清综合低空飞行与突防技术研究[学位论文] 1998
8.ScottA Bortoff Path planning for UAVs 2000
9.Szczer ba Robert J Robust Algorithm for Real-Time Route Planning 2000(03)
10.李春华一种三维航迹快速搜索方法[期刊论文]-宇航学报 2002(03)
11.高晖无人机航路规划研究[期刊论文]-南京航空航天大学学报 2001(02)
12.Li Qing.Gao Wei.Lu Yuping Aircraft route optimization using genetic algorithms 1997
13.Pellazar Miles B Vehicle route planning with constraints using genetic algorithms 1994
14.张海智能化对地攻击路线规划方法与算法研究 1998
15.金飞虎.洪炳熔.高庆吉基于蚁群算法的自由飞行空间机器人路径规划[期刊论文]-机器人 2002(06)
16.Doerner Karl.Gronalt Manfred.Hartl Richard F Savings ants for the vehicle routing problem
2002(05)
17.叶文.范洪达基于改进蚁群算法的飞机低空突防航路规划[期刊论文]-飞行力学 2004(03)
18.范洪达.叶文基于元胞自动机的飞机低空突防航路动态优化[期刊论文]-飞行力学 2004(02)
相似文献(10条)
1.期刊论文汤先拓.冯小松.赵望锋.TANG Xian-tuo.FENG Xiao-song.ZHAO Wang-feng动态规划算法在最优航路规
划中的应用-广州航海高等专科学校学报2009,17(2)
通过对船舶最优航路概念的分析,提出了一种基于动态规划算法的船舶最优航路规划,实现了船舶最优航线的自动生成,不仅可大大减轻航海作业人员的工作强度,同时也能增强航线的安全性和可靠性.
2.期刊论文史超.单连平.石风江.Shi Chao.Shan Lianping.Shi Fengjiang军用飞行器低空突防航路规划算法分
析-舰船电子工程2009,29(9)
通过分析军用飞行器低空突防航路规划算法应满足的条件及特点,阐述了目前国内外正在研究和应用的几种航路规划算法:动态规划法、启发式A*搜索法、遗传算法、蚁群算法等,并分别指出了其优缺点.最后简要总结低空突防航路规划算法的发展方向.
3.期刊论文安柏义.曹云峰.An Baiyi.Cao Yunfeng基于动态规划的无人机航路优化问题研究-计算机测量与控制
2008,16(8)
无人机航路规划往往指无人机在初始位置、终止位置和一些目标任务结点确定之后的航迹优化问题;在无人机飞行任务执行过程中,无人机需要在参考飞行航线的约束下,根据局部地形、地貌、障碍、威胁等信息以及飞机本身机动能力的限制,实时的计算出飞行航路,并跟随该航迹完成飞行任务;在利用Dynapath(动态路径)算法进行参考航线优化的过程中,考虑了飞机机动性能的限制;在此基础上,详细讨论了参考航线由多航段组成时航路点的处理方法并进行了计算机仿真,仿真结果表明该方法可以比较理想地进行航路点的处理,得到比较良好的最优航迹.
4.学位论文杨力无人机航路规划技术研究2009
路规划方法进行以下几个方面的研究。
首先,确定无人机航路规划的研究内容包括规划空间环境建模、约束条件、任务要求和规划算法。根据无人机定高飞行,建立了合适的环境模型。根据无人机的各项约束条件以及航路规划目标,确定本文采用的规划方法。
其次,将遗传算法的思想与具体的航路规划问题相结合,通过采用一种变长实值基因编码方式和特定的进化算子,将无人机的约束条件融合于算法中
,使生成的航路能够满足实际的飞行要求。通过优化设计评价函数,使算法能根据不同的任务需求规划出满足生存概率和突防概率等不同作战效能的飞行航路。
然后,在基于进化计算的航路规划方法基础上,运用聚类算法和小生境的思想,将航路个体按空间分布进行聚类,将航路种群划分为不同的子种群进化,运用分散求解的思想,通过协同变量和协同函数,将复杂的协同问题分解为多个小的优化问题,实现了多架无人机航路协同规划。
最后,研究实现了具有导向性的连接型快速搜索随机树,加快算法的收敛速度,使算法路径搜索具有更强的目标性。使用高效的k-d tree 数据结构提高算法的搜索效率。将改进的算法应用于无人机飞行中突发威胁和障碍物环境下的快速动态航路规划问题中,仿真实验表明算法能够快速有效的为无人机规划新的航路。
本文的研究工作能够根据无人机的不同任务要求,结合静态规划和动态规划优点,提高无人机自主飞行作战效能,实现无人机作战前的航路静态规划和飞行过程中航路动态规划,所有算法均在VC++6.0 下调试通过,满足常规无人机战时对航路规划时间的要求。
5.会议论文王磊.王英勋动态规划算法在无人机航路离线规划中的应用2002
随着无人机的迅猛发展,无人机航路规划正朝着智能化的方向发展,最优航迹的自动生成在无人机飞控系统中变得越来越重要,用于生成最优航迹的各种离线、在线算法正在研究当中.本文重点介绍了动态规划算法在解决障碍圆情况时的应用.
6.期刊论文穆晓敏.姜智超.包一鸣.吴森堂.Mu Xiaomin.Jiang Zhichao.Bao Yiming.Wu Sentang低空突防最优航
路规划算法与仿真-航天控制2005,23(1)
基于树型拓扑结构和动态规划理论,通过全局离线规划和局部实时规划相结合,探讨了一种适合于工程应用的低空突防最优航路规划算法,并采用航迹剖面坡度/曲率设计方法进行平滑和曲线拟合,利用飞行控制制导系统所需的控制指令转换,实现了在巡航导弹低空突防综合演示系统上的仿真运行,进一步验证了算法的有效性.
7.期刊论文高晖.陈欣.夏云程.Gao Hui.Chen Xin.Xia Yuncheng无人机航路规划研究-南京航空航天大学学报
2001,33(2)
无人机航路规划的目的是无人机具有对复杂任务进行快速规划或重规划的能力,其中快速而有效的重规划尤其重要。在无人机飞行任务执行过程中,无人机需要根据局部地形、地貌、障碍、威胁等信息以及飞机本身机动能力的限制,实时地计算出飞行航路,并跟踪该航路完成飞行任务。本文通过比较各种算法在航路规划应用中的优劣性,提出了Dynapath(动态规划)算法在无人机航路规划中的应用,给出了仿真结果。仿真结果表明:Dynapath算法生成的最优参考航路基本上满足无人机任务飞行的要求,获得了良好的飞行品质。
8.期刊论文黄鑫.蔡志明.姚万军.HUANG Xin.CAI Zhi-Ming.YAO Wan-jun基于指标函数集合排序法的UUV航路规划
-鱼雷技术2008,16(2)
潜艇艇载战术无人水下航行体(UUV)的军事应用要求其全局航路规划求解算法必须兼顾计算快速性与任务适应性要求.使用动态规划算法求解该问题较其他算法具有求解速度快的优势,而传统动态规划使用单一指标函数存在任务适应性不高的问题,为此提出使用指标函数排序集合的改进方法,说明了该方法的使用时机与程序实现要点.该方法用一个可变的指标函数集合代替了单一的指标函数,其程序流程与传统方法基本相同,只是初始化模块、算法模块以及一些预备工作有所不同.仿真结果证明了改进方法的有效性,且在任务适应性上有明显提高,可降低整个航路规划的时间消耗.
9.学位论文高晖无人机实进仿真环境中三维动画设计及飞行航路规划研究2001
无人机实进仿真三维动画设计:讲述在UNIX平台SGI工作站上利用其强大的图形多媒体、网络通讯工能和CSI Visual Simulation仿真软件包建立一套虚拟现产仿真系统;然后将在SGI工作站上建立的仿真系统移植到PC环境下(飞行仪表部分).采用了移植、计算机图形学、 OpenGL、Windows Sockets、多线程、多视窗等关键技术,详细介绍了系统的实现方法与应用结果.并通过全系统联试,验证了本系统设计的正确性.无人机航路规划:无人机飞行任务执行过程中,无要机需要根据局部地形、地貌、障碍、威胁等信息以及飞机本身机动能力有限制,实进地计算出飞行航路,并跟踪该航路完成飞行任务.该文通过过比较各种算法在航路规划应用中的优劣性,提出了Dynapath(动态规划)算法,详累阐述了Dynapath处法在航路规划中的应用,给出了仿真结果,并通过软件编程获得实现.
10.期刊论文任博.潘景余.苏畅.张恒喜.REN Bo.PAN Jing-yu.SU Chang.ZHANG Heng-xi不确定环境下的侦察无人
机自主航路规划仿真-电光与控制2008,15(1)
自主式无人机是无人机发展的必然趋势,不确定环境下的航路规划是无人机航路规划研究的新领域.为了研究战时条件下侦察无人机的自主航路规划,根据无人机的控制系统工作方式,建立了仿真模型框架,并在此基础上开展仿真研究.首先,针对战时条件下侦察无人机执行任务的不确定环境,从战场使用的实际情况出发,建立了基于目标存在概率的环境信息模型;然后,根据无人机机载探测设备探测区域建立了探测模型,提出了航路控制决策模型,并采用动态规划进行航路规划.最后,设计了一个无人机侦察不确定环境的仿真试验,仿真结果验证了该方法的有效性.
引证文献(5条)
1.程春华.吴进华.周大旺一种基于SVM的航路规划研究[期刊论文]-海军航空工程学院学报 2010(1)
2.刘佶鑫.赵英凯元胞蚁群路径规划方法[期刊论文]-机床与液压 2009(6)
3.刘佶鑫.赵英凯蚁群元胞模型的应用研究[期刊论文]-计算机工程与设计 2009(9)
4.刘佶鑫.赵英凯蚁群算法元胞自动机模型应用[期刊论文]-南京工业大学学报(自然科学版) 2008(6)
5.黄鑫.蔡志明.姚万军基于指标函数集合排序法的UUV航路规划[期刊论文]-鱼雷技术 2008(2)
本文链接:https://www.360docs.net/doc/3e17578515.html,/Periodical_xtfzxb200710052.aspx
授权使用:南京航空航天大学图书馆(wfnhtsg),授权号:a45028d1-290e-4a79-9150-9e4a017042fa
下载时间:2010年12月12日
Kruskal算法求最小生成树
荆楚理工学院 课程设计成果 学院:_______计算机工程学院__________ 班级: 14计算机科学与技术一班 学生姓名: 志杰学号: 2014407020137 设计地点(单位)_____B5101_________ ____________ 设计题目:克鲁斯卡尔算法求最小生成树__________________________________ 完成日期:2015年1月6日 指导教师评语: ______________ _________________________ ___________________________________________________________________________________ ___________________________________________________________________________________________ ___________________________ __________ _ 成绩(五级记分制):_____ _ __________ 教师签名:__________ _______________
注:介于A和C之间为B级,低于C为D级和E级。按各项指标打分后,总分在90~100为优,80~89为良,70~79为中,60~69为及格,60分以下为不及格。
目录 1 需求分析 (1) 1.1系统目标 (1) 1.2主体功能 (1) 1.3开发环境 (1) 2 概要设计 (1) 2.1功能模块划分 (1) 2.2 系统流程图 (2) 3 详细设计 (3) 3.1 数据结构 (3) 3.2 模块设计 (3) 4测试 (3) 4.1 测试数据 (3) 4.2测试分析 (4) 5总结与体会 (6) 5.1总结: (6) 5.2体会: (6) 参考文献 (7) 附录全部代码 (8)
动态规划与回溯法解决0-1背包问题
0-1背包动态规划解决问题 一、问题描述: 有n个物品,它们有各自的重量和价值,现有给定容量的背包,如何让背包里装入的物品具有最大的价值总和? 二、总体思路: 根据动态规划解题步骤(问题抽象化、建立模型、寻找约束条件、判断是否满足最优性原理、找大问题与小问题的递推关系式、填表、寻找解组成)找出01背包问题的最优解以及解组成,然后编写代码实现。 原理: 动态规划与分治法类似,都是把大问题拆分成小问题,通过寻找大问题与小问题的递推关系,解决一个个小问题,最终达到解决原问题的效果。但不同的是,分治法在子问题和子子问题等上被重复计算了很多次,而动态规划则具有记忆性,通过填写表把所有已经解决的子问题答案纪录下来,在新问题里需要用到的子问题可以直接提取,避免了重复计算,从而节约了时间,所以在问题满足最优性原理之后,用动态规划解决问题的核心就在于填表,表填写完毕,最优解也就找到。 过程: a) 把背包问题抽象化(X1,X2,…,Xn,其中 Xi 取0或1,表示第i个物品选或不选),V i表示第i个物品的价值,W i表示第i个物品的体积(重量); b) 建立模型,即求max(V1X1+V2X2+…+VnXn); c) 约束条件,W1X1+W2X2+…+WnXn
文本分类中的特征提取和分类算法综述
文本分类中的特征提取和分类算法综述 摘要:文本分类是信息检索和过滤过程中的一项关键技术,其任务是对未知类别的文档进行自动处理,判别它们所属于的预定义类别集合中的类别。本文主要对文本分类中所涉及的特征选择和分类算法进行了论述,并通过实验的方法进行了深入的研究。 采用kNN和Naive Bayes分类算法对已有的经典征选择方法的性能作了测试,并将分类结果进行对比,使用查全率、查准率、F1值等多项评估指标对实验结果进行综合性评价分析.最终,揭示特征选择方法的选择对分类速度及分类精度的影响。 关键字:文本分类特征选择分类算法 A Review For Feature Selection And Classification Algorithm In Text Categorization Abstract:Text categorization is a key technology in the process of information retrieval and filtering,whose task is to process automatically the unknown categories of documents and distinguish the labels they belong to in the set of predefined categories. This paper mainly discuss the feature selection and classification algorithm in text categorization, and make deep research via experiment. kNN and Native Bayes classification algorithm have been applied to test the performance of classical feature detection methods, and the classification results based on classical feature detection methods have been made a comparison. The results have been made a comprehensive evaluation analysis by assessment indicators, such as precision, recall, F1. In the end, the influence feature selection methods have made on classification speed and accuracy have been revealed. Keywords:Text categorization Feature selection Classification algorithm
一种快速神经网络路径规划算法概要
文章编号 2 2 2 一种快速神经网络路径规划算法α 禹建丽? ∏ √ 孙增圻成久洋之 洛阳工学院应用数学系日本冈山理科大学工学部电子工学科 2 清华大学计算机系国家智能技术与系统重点实验室日本冈山理科大学工学部信息工学科 2 摘要本文研究已知障碍物形状和位置环境下的全局路径规划问题给出了一个路径规划算法其能量函数 利用神经网络结构定义根据路径点位于障碍物内外的不同位置选取不同的动态运动方程并针对障碍物的形状设 定各条边的模拟退火初始温度仿真研究表明本文提出的算法计算简单收敛速度快能够避免某些局部极值情 况规划的无碰路径达到了最短无碰路径 关键词全局路径规划能量函数神经网络模拟退火 中图分类号 ×°文献标识码 ΦΑΣΤΑΛΓΟΡΙΤΗΜΦΟΡΠΑΤΗΠΛΑΝΝΙΝΓ ΒΑΣΕΔΟΝΝΕΥΡΑΛΝΕΤ? ΟΡΚ ≠ 2 ? ? ≥ 2 ≥ ∏ ΔεπαρτμεντοφΜατηεματιχσ ΛυοψανγΙνστιτυτεοφΤεχηνολογψ Λυοψανγ
ΔεπαρτμεντοφΕλεχτρονιχΕνγινεερινγ ΦαχυλτψοφΕνγινεερινγ ΟκαψαμαΥνι?ερσιτψοφΣχιενχε 2 Ριδαι2χηο 2 ?απαν ΔεπαρτμεντοφΧομπυτερΣχιενχε Τεχηνολογψ ΣτατεΚεψΛαβοφΙντελλιγεντΤεχηνολογψ Σψστεμσ ΤσινγηυαΥνι?ερσιτψ Βει?ινγ ΔεπαρτμεντοφΙνφορματιον ΧομπυτερΕνγινεερινγ ΦαχυλτψοφΕνγινεερινγ ΟκαψαμαΥνι?ερσιτψοφΣχιενχε 2 Ριδαι2χηο 2 ?απαν Αβστραχτ ∏ √ √ √ × ∏ ∏ ∏ ∏ ∏ ∏ 2 ∏ √ × ∏ ∏ ∏ ∏ √ ∏ Κεψωορδσ ∏ ∏ ∏ 1引言Ιντροδυχτιον 机器人路径规划问题可以分为两种一种是基于环境先验完全信息的全局路径规划≈ 另一种是基于传感器信息的局部路径规划≈ ?后者环境是未知或者部分未知的全局路径规划已提出的典型方法有可视图法 ! 图搜索法≈ ! 人工势场法等可视图法的优点是可以求得最短路径但缺乏灵活性并且存在组合爆炸问题图搜索法比较灵活机器人的起始点和目标点的改变不会造成连通图的重新构造但不是任何时候都可以获得最短路径可视图法和图搜索法适用于多边形障碍物的避障路径规划问题但不适用解决圆形障碍物的避障路径规划问题人工势场法的基本思想是通过寻找路径点的能量函数的极小值点而使路径避开障碍物但存在局部极小值问题且不适于寻求最短路径≈ 文献≈ 给出的神经网络路径规划算法我们称为原算法引入网络结构和模拟退火等方法计算简单能避免某些局部极值情况且具有并行性及易于从二维空间推广到三维空间等优点对人工势场法给予了较大的改进但在此算法中由于路径点的总能量函数是由碰撞罚函数和距离函数两部分的和构成的而路径点 第卷第期年月机器人ΡΟΒΟΤ? α收稿日期
kruskal算法求最小生成树
#include
{ int u, v, w; }EG[5010]; bool cmp(eage a, eage b) //排序调用 { return a.w < b.w; } int Find(int x) //寻找根节点,判断是否在同一棵树中的依据 { if(parent[x] == -1) return x; return Find(parent[x]); } void Kruskal() //Kruskal算法,parent能够还原一棵生成树,或者森林{ memset(parent, -1, sizeof(parent)); sort(EG+1, EG+m+1, cmp); //按权值将边从小到大排序 ans = 0; for(int i = 1; i <= m; i++) //按权值从小到大选择边 { int t1 = Find(EG[i].u), t2 = Find(EG[i].v); if(t1 != t2) //若不在同一棵树种则选择该边,合并两棵树 { ans += EG[i].w; parent[t1] = t2; printf("最小生成树加入的边为:%d %d\n",EG[i].u,EG[i].v); } } } int main() { printf("输入顶点数和边数:"); while(~scanf("%d%d", &n,&m)) { for(int i = 1; i <= m; i++) scanf("%d%d%d", &EG[i].u, &EG[i].v, &EG[i].w); Kruskal(); printf("最小生成树权值之和为:%d\n", ans); } return 0; }
遗传算法与机器人路径规划
遗传算法与机器人路径规划 摘要:机器人的路径规划是机器人学的一个重要研究领域,是人工智能和机器人学的一个结合点。对于移动机器人而言,在其工作时要求按一定的规则,例如时间最优,在工作空间中寻找到一条最优的路径运动。机器人路径规划可以建模成在一定的约束条件下,机器人在工作过程中能够避开障碍物从初始位置行走到目标位置的路径优化过程。遗传算法是一种应用较多的路径规划方法,利用地图中的信息进行路径规划,实际应用中效率比较高。 关键词:路径规划;移动机器人;避障;遗传算法 Genetic Algorithm and Robot Path Planning Abstract: Robot path planning research is a very important area of robotics, it is also a combine point of artificial intelligence and robotics. For the mobile robot, it need to be worked by certain rulers(e.g time optimal),and find a best movement path in work space. Robot path planning can be modeled that in the course of robots able to avoid the obstacles from the initial position to the target location,and it ruquire to work under ertain constraints. Genetic algorithm used in path planning is very common, when planning the path ,it use the information of map ,and have high eficient in actual. Key words: Path planning,mobile robot, avoid the obstacles, genetic algorithm 1路径规划 1.1机器人路径规划分类 (1)根据机器人对环境信息掌握的程度和障碍物的不同,移动机器人的路径规划基本上可分为以下几类: 1,已知环境下的对静态障碍物的路径规划; 2,未知环境下的对静态障碍物的路径规划; 3,已知环境下对动态障碍物的路径规划; 4,未知环境下的对动态障碍物的路径规划。 (2)也可根据对环境信息掌握的程度不同将移动机器人路径规划分为两种类型: 1,基于环境先验完全信息的全局路径规划; 2,基于传感器信息的局部路径规划。 (第二种中的环境是未知或部分未知的,即障碍物的尺寸、形状和位置等信息必须通过传感器获取。) 1.2路径规划步骤 无论机器人路径规划属于哪种类别,采用何种规划算法,基本上都要遵循以下步骤: 1, 建立环境模型,即将现实世界的问题进行抽象后建立相关的模型; 2, 路径搜索方法,即寻找合乎条件的路径的算法。 1.3路径规划方法
Kruskal算法说明及图解
1.无向网图及边集数组存储示意图 vertex[6]= 2.Kruskal 方法构造最小生成树的过程 (a)一个图 (b)最小生成树过程1 V0 V1 V2 V3 V4 V5 下标 0 1 2 3 4 5 6 7 8 from 1 2 0 2 3 4 0 3 0 to 4 3 5 5 5 5 1 4 2 weight 12 17 19 25 25 26 34 38 46 V1 V0 V4 V5 V2 V3 V1 V0 V5 V2 V3 V4
(c)最小生成树过程2 (d)最小生成树过程3 (e)最小生成树过程4 3.伪代码 1)初始化辅助数组parent[vertexNum];num=0; 2) 依次考查每一条边for(i=0; i 物流配送最优路径规划 关于交通运输企业物流配送最优路径规划的 研究现状、存在问题及前景展望 摘要:本文综述了在交通运输企业的物流配送领域最优路径规划的主要研究成果、研究存在问题及研究方向。主要研究成果包括运用各种数学模型和算法在运输网中选取最短或最优路径;从而达到路径、时间最优和费用最优;以及物流配送网络优化、车辆系统化统一调度的发展。今后研究的主要方向包括绿色物流,运输系统及时性和准确性研究等。 关键词:物流配送;最优路径;路径规划 Overview of scheme on Shortest Logistics Distribution Route in Transportation Industry Student: Wan Lu Tutor: Chen Qingchun Abstract: This paper reviewed of the optimal path planning about the main research results, problems and direction in the field of transportation enterprise logistics distribution. Main research results include using various mathematical model and algorithm selection or optimal shortest path in the network. So we can achieve the optimal path, the shortest time and minimum cost. At the same time, logistics distribution network optimization, the vehicle systematic development of unified scheduling are the research issues.The main direction of future research include green logistics, transportation system accurately and timely research and so on. Key words: Logics Distribution; Optimal Path; Path Planning 引言 物流业在我国的新兴经济产业中占据了重要了地位,称为促进经济快速增长的“加速器”。而物流配送作为物流系统的重要环节,影响着物流的整个运作过程以及运输企业的发展趋势和前景。采用科学、合理的方法来进行物流配送路径的优化,是物流配送领域的重要研究内容。近年,国内外均有大量的企业机构、学者对物流配送中最优路径选择的问题,进行了大量深入的研究,从早期车辆路径问题研究,到根据约束模型及条件不断变化的车辆最优路径研究,以及随着计算机学科的发展而推出的针对物流配送路径最优化的模型和算法等方面,都取得丰硕的学术成果。但是对于绿色物流配送的研究仍然不足。鉴于物流配送最优路径研究的重大理论意义和实践价值,为对我国物流配送的效率水平有一个系统的理解和把握,有必要对现有成果进行统计和归纳。本文尝试对我国运输企业物流配送最优路径规划进行探讨,以期为今后做更深人和全面的研究提供一定的线索和分析思路。 1 国内外研究现状 1.1 国内研究现状 1.1.1 主要研究的问题 快速流分类算法研究综述 李振强 (北京邮电大学信息网络中心,北京 100876) 摘要 本文对流分类算法进行了综述,包括流分类的定义,对流分类算法的要求,以及各种流分类算法的分析比较。文章的最后指出了在流分类方面还没有得到很好解决的问题,作为进一步研究的方向。 关键词 流分类;服务质量;IP 背景 当前的IP网络主要以先到先服务的方式提供尽力而为的服务。随着Internet的发展和各种新业务的出现,尽力而为的服务已经不能满足人们对Internet的要求,IP网络必须提供增强的服务,比如:SLA(Service Level Agreement)服务,VPN(Virtual Private Network)服务,各种不同级别的QoS (Quality of Service)服务,分布式防火墙,IP安全网关,流量计费等。所有这些增强服务的提供都依赖于流分类,即根据包头(packet header)中的一个或几个域(field)决定该包隶属的流(flow)。典型的,包头中可以用来分类的域包括:源IP地址(Source IP Address)、目的IP地址(Destination IP Address)、协议类型(Protocol Type)、源端口(Source Port)和目的端口(Destination Port)等。 流分类算法描述 首先定义两个名词:规则(rule)和分类器(classifier)。用来对IP包进行分类的由包头中若干域组成的集合称之为规则,而若干规则的集合就是分类器。构成规则的域(我们称之为组件component)的值可以是某个范围,例如目的端口大于1023。流分类就是要确定和每个包最匹配的规则。表1是由6条规则组成的一个分类器。我们说这是一个5域分类器,因为每条规则由5个组件构成。我们假定分类器中的规则是有优先级的,越靠前的规则优先级越高,即规则1的优先级最高,规则6的最低。 #include { printf("请输入有边的2个顶点\n"); scanf("%d %d",&n,&m); while(n < 0 || n > G->vexnum || m < 0 || n > G->vexnum) { printf("输入的数字不符合要求请重新输入:\n"); scanf("%d%d",&n,&m); } G->arc[n][m].adj = G->arc[m][n].adj = 1; getchar(); printf("请输入%d与%d之间的权值:\n", n, m); scanf("%d",&G->arc[n][m].weight); } printf("邻接矩阵为:\n"); for ( i = 1; i <= G->vexnum; i++) { for ( j = 1; j <= G->vexnum; j++) { printf("%d ",G->arc[i][j].adj); } printf("\n"); } } void sort(edge edges[],MGraph *G)//对权值进行排序{ int i, j; for ( i = 1; i < G->arcnum; i++) { for ( j = i + 1; j <= G->arcnum; j++) { if (edges[i].weight > edges[j].weight) { Swapn(edges, i, j); } } } printf("权排序之后的为:\n"); for (i = 1; i < G->arcnum; i++) { 移动机器人路径规划方法 1.1路径规划方法 路径规划技术是机器人研究领域中的一个重要课题,是机器人导航中最重要的任务之一,国外文献常将其称为Path Planning,Find-PathProblem,Collision-Free,ObstacleAvoidance, MotionPlanning,etc.所谓机器人的最优路径规划问题,就是依据某个或某些优化准则(如工作代价最小、行走路线最短、行走时间最短等),在其工作空间中找到一条从起始状态到目标状态的能避开障碍物的最优路径。 路径规划主要涉及的问题包括:利用获得的移动机器人环境信息建立较为合理的模型,再用某种算法寻找一条从起始状态到目标状态的最优或近似最优的无碰撞路径;能够处理环境模型中的不确定因素和路径跟踪中出现的误差,使外界物体对机器人的影响降到最小;如何利用已知的所有信息来引导机器人的动作,从而得到相对更优的行为决策。这其中的根本问题是世界模型的表达和搜寻策略。障碍物在环境中的不同分布情况当然直接影响到规划的路径,而目标位置的确定则是由更高一级的任务分解模块提供的[8]。 根据机器人对环境信息掌握的程度和障碍物运动状态的不同,移动机器人的路径规划基本上可分为以下四类:①已知环境下的对静态障碍物的路径规划;②未知环境下的对静态障碍物的路径规划;③已 知环境下对动态障碍物的路径规划;④未知环境下对动态障碍物的路径规划。因此根据机器人对环境信息掌握的程度不同,可将机器人的路径规划问题可分为二大类即:基于环境先验信息的全局路径规划问题和基于不确定环境的局部路径规划问题。目前,路径规划研究方法大概可分为两大类即:传统方法和智能方法。 1.2传统路径规划方法 传统的路径规划方法主要包括:可视图法(V-Graph)、自由空间法(Free Space Approach)、人工势场法(Artificial Potential Field)和栅格法(Grids)等。 ⑴可视图法(V-Graph) 可视图法是Nilsson1968年在文献[9]中首次提出。可视图法将移动机器人视为一点,将机器人起始点、目标点和多边形障碍物的各定点组合连接,保证这些直线不与障碍物相交,这就构成了一张无向图称为可视图。由于任意两条直线的定点都是可见的,从起点沿着这些直线到达目标点的路线都是无碰撞的。于是,搜索最优路径的问题就转化为从起始点到目标点经过这些可视直线的最短距离问题。 这种方法的优点是可以得到最优路径,但缺陷是环境特征的提取比较困难,缺乏灵活性,一般需要机器人停止在障碍物前搜集传感器数据,并且传感器的精度对其影响也较大,尤其在复杂的非规整环境下更加难以实现安全无碰撞的路径规划。 ⑵自由空间法(Free Space Approach) 启发式优化算法综述 一、启发式算法简介 1、定义 由于传统的优化算法如最速下降法,线性规划,动态规划,分支定界法,单纯形法,共轭梯度法,拟牛顿法等在求解复杂的大规模优化问题中无法快速有效地寻找到一个合理可靠的解,使得学者们期望探索一种算法:它不依赖问题的数学性能,如连续可微,非凸等特性; 对初始值要求不严格、不敏感,并能够高效处理髙维数多模态的复杂优化问题,在合理时间内寻找到全局最优值或靠近全局最优的值。于是基于实际应用的需求,智能优化算法应运而生。智能优化算法借助自然现象的一些特点,抽象出数学规则来求解优化问题,受大自然的启发,人们从大自然的运行规律中找到了许多解决实际问题的方法。对于那些受大自然的运行规律或者面向具体问题的经验、规则启发出来的方法,人们常常称之为启发式算法(Heuristic Algorithm)。 为什么要引出启发式算法,因为NP问题,一般的经典算法是无法求解,或求解时间过长,我们无法接受。因此,采用一种相对好的求解算法,去尽可能逼近最优解,得到一个相对优解,在很多实际情况中也是可以接受的。启发式算法是一种技术,这种技术使得在可接受的计算成本内去搜寻最好的解,但不一定能保证所得的可行解和最优解,甚至在多数情况下,无法阐述所得解同最优解的近似程度。 启发式算法是和问题求解及搜索相关的,也就是说,启发式算法是为了提高搜索效率才提出的。人在解决问题时所采取的一种根据经验规则进行发现的方法。其特点是在解决问题 时,利用过去的经验,选择已经行之有效的方法,而不是系统地、以确定的步骤去寻求答案,以随机或近似随机方法搜索非线性复杂空间中全局最优解的寻取。启发式解决问题的方法是与算法相对立的。算法是把各种可能性都一一进行尝试,最终能找到问题的答案,但它是在很大的问题空间内,花费大量的时间和精力才能求得答案。启发式方法则是在有限的搜索空间内,大大减少尝试的数量,能迅速地达到问题的解决。 2、发展历史 启发式算法的计算量都比较大,所以启发式算法伴随着计算机技术的发展,才能取得了巨大的成就。纵观启发式算法的历史发展史: 40年代:由于实际需要,提出了启发式算法(快速有效)。 50年代:逐步繁荣,其中贪婪算法和局部搜索等到人们的关注。 60年代: 反思,发现以前提出的启发式算法速度很快,但是解得质量不能保证,而且对大规模的问题仍然无能为力(收敛速度慢)。 70年代:计算复杂性理论的提出,NP问题。许多实际问题不可能在合理的时间范围内找到全局最优解。发现贪婪算法和局部搜索算法速度快,但解不好的原因主要是他们只是在局部的区域内找解,等到的解没有全局最优性。由此必须引入新的搜索机制和策略。 Holland的遗传算法出现了(Genetic Algorithm)再次引发了人们研究启发式算法的兴趣。 80年代以后:模拟退火算法(Simulated Annealing Algorithm),人工神经网络(Artificial Neural Network),禁忌搜索(Tabu Search)相继出现。 最近比较火热的:演化算法(Evolutionary Algorithm), 蚁群算法(Ant Algorithms),拟人拟物算法,量子算法等。 《数据挖掘》 数据挖掘分类算法综述 专业:计算机科学与技术专业学号:S2******* 姓名:张靖 指导教师:陈俊杰 时间:2011年08月21日 数据挖掘分类算法综述 数据挖掘出现于20世纪80年代后期,是数据库研究中最有应用价值的新领域之一。它最早是以从数据中发现知识(KDD,Knowledge Discovery in Database)研究起步,所谓的数据挖掘(Data Mining,简称为DM),就从大量的、不完全的、有噪声的、模糊的、随机的、实际应用的数据中提取隐含在其中的、人们不知道的但又有用的信息和知识的过程。 分类是一种重要的数据挖掘技术。分类的目的是根据数据集的特点构造一个分类函数或分类模型(也常常称作分类器)。该模型能把未知类别的样本映射到给定类别中的一种技术。 1. 分类的基本步骤 数据分类过程主要包含两个步骤: 第一步,建立一个描述已知数据集类别或概念的模型。如图1所示,该模型是通过对数据库中各数据行内容的分析而获得的。每一数据行都可认为是属于一个确定的数据类别,其类别值是由一个属性描述(被称为类别属性)。分类学习方法所使用的数据集称为训练样本集合,因此分类学习又可以称为有指导学习(learning by example)。它是在已知训练样本类别情况下,通过学习建立相应模型,而无指导学习则是在训练样本的类别与类别个数均未知的情况下进行的。 通常分类学习所获得的模型可以表示为分类规则形式、决策树形式或数学公式形式。例如,给定一个顾客信用信息数据库,通过学习所获得的分类规则可用于识别顾客是否是具有良好的信用等级或一般的信用等级。分类规则也可用于对今后未知所属类别的数据进行识别判断,同时也可以帮助用户更好的了解数据库中的内容。 图1 数据分类过程中的学习建模 第二步,利用所获得的模型进行分类操作。首先对模型分类准确率进行估计,例如使用保持(holdout)方法。如果一个学习所获模型的准确率经测试被认为是可以接受的,那么就可以使用这一模型对未来数据行或对象(其类别未知)进行分类。例如,在图2中利用学习获得的分类规则(模型)。对已知测试数据进行模型 第25卷第7期V ol.25No.7 控制与决策 Control and Decision 2010年7月 Jul.2010移动机器人路径规划技术综述 文章编号:1001-0920(2010)07-0961-07 朱大奇,颜明重 (上海海事大学水下机器人与智能系统实验室,上海201306) 摘要:智能移动机器人路径规划问题一直是机器人研究的核心内容之一.将移动机器人路径规划方法概括为:基于模版匹配路径规划技术、基于人工势场路径规划技术、基于地图构建路径规划技术和基于人工智能的路径规划技术.分别对这几种方法进行总结与评价,最后展望了移动机器人路径规划的未来研究方向. 关键词:移动机器人;路径规划;人工势场;模板匹配;地图构建;神经网络;智能计算 中图分类号:TP18;TP273文献标识码:A Survey on technology of mobile robot path planning ZHU Da-qi,YAN Ming-zhong (Laboratory of Underwater Vehicles and Intelligent Systems,Shanghai Maritime University,Shanghai201306, China.Correspondent:ZHU Da-qi,E-mail:zdq367@https://www.360docs.net/doc/3e17578515.html,) Abstract:The technology of intelligent mobile robot path planning is one of the most important robot research areas.In this paper the methods of path planning are classi?ed into four classes:Template based,arti?cial potential?eld based,map building based and arti?cial intelligent based approaches.First,the basic theories of the path planning methods are introduced brie?y.Then,the advantages and limitations of the methods are pointed out.Finally,the technology development trends of intelligent mobile robot path planning are given. Key words:Mobile robot;Path planning;Arti?cial potential?eld;Template approach;Map building;Neural network; Intelligent computation 1引言 所谓移动机器人路径规划技术,就是机器人根据自身传感器对环境的感知,自行规划出一条安全的运行路线,同时高效完成作业任务.移动机器人路径规划主要解决3个问题:1)使机器人能从初始点运动到目标点;2)用一定的算法使机器人能绕开障碍物,并且经过某些必须经过的点完成相应的作业任务;3)在完成以上任务的前提下,尽量优化机器人运行轨迹.机器人路径规划技术是智能移动机器人研究的核心内容之一,它起始于20世纪70年代,迄今为止,己有大量的研究成果报道.部分学者从机器人对环境感知的角度,将移动机器人路径规划方法分为3种类型[1]:基于环境模型的规划方法、基于事例学习的规划方法和基于行为的路径规划方法;从机器人路径规划的目标范围看,又可分为全局路径规划和局部路径规划;从规划环境是否随时间变化方面看,还可分为静态路径规划和动态路径规划. 本文从移动机器人路径规划的具体算法与策略上,将移动机器人路径规划技术概括为以下4类:模版匹配路径规划技术、人工势场路径规划技术、地图构建路径规划技术和人工智能路径规划技术.分别对这几种方法进行总结与评价,展望了移动机器人路径规划的未来发展方向. 2模版匹配路径规划技术 模版匹配方法是将机器人当前状态与过去经历相比较,找到最接近的状态,修改这一状态下的路径,便可得到一条新的路径[2,3].即首先利用路径规划所用到的或已产生的信息建立一个模版库,库中的任一模版包含每一次规划的环境信息和路径信息,这些模版可通过特定的索引取得;随后将当前规划任务和环境信息与模版库中的模版进行匹配,以寻找出一 收稿日期:2009-08-30;修回日期:2009-11-18. 基金项目:国家自然科学基金项目(50775136);高校博士点基金项目(20093121110001);上海市教委科研创新项目(10ZZ97). 作者简介:朱大奇(1964?),男,安徽安庆人,教授,博士生导师,从事水下机器人可靠性与路径规划等研究;颜明重(1977?),男,福建泉州人,博士生,从事水下机器人路径规划的研究. 数据挖掘中的文本挖掘的分类算法综述 摘要 随着Internet上文档信息的迅猛发展,文本分类成为处理和组织大量文档数据的关键技术。本文首先对数据挖掘进行了概述包括数据挖掘的常用方法、功能以及存在的主要问题;其次对数据挖掘领域较为活跃的文本挖掘的历史演化、研究现状、主要内容、相关技术以及热点难点问题进行了探讨;在第三章先分析了文本分类的现状和相关问题,随后详细介绍了常用的文本分类算法,包括KNN 文本分类算法、特征选择方法、支持向量机文本分类算法和朴素贝叶斯文本分类算法;;第四章对KNN文本分类算法进行深入的研究,包括基于统计和LSA降维的KNN文本分类算法;第五章对数据挖掘、文本挖掘和文本分类的在信息领域以及商业领域的应用做了详细的预测分析;最后对全文工作进行了总结和展望。 关键词:数据挖掘,文本挖掘,文本分类算法 ABSTRACT With the development of Web 2.0, the number of documents on the Internet increases exponentially. One important research focus on how to deal with these great capacity of online documents. Text classification is one crucial part of information management. In this paper we first introduce the basic information of data mining, including the methods, contents and the main existing problems in data mining fields; then we discussed the text mining, one active field of data mining, to provide a basic foundation for text classification. And several common algorithms are analyzed in Chapter 3. In chapter 4 thorough research of KNN text classification algorithms are illustrated including the statistical and dimension reduction based on LSA and in chapter 5 we make some predictions for data mining, text mining and text classification and finally we conclude our work. KEYWORDS: data mining, text mining, text classification algorithms,KNN 目录 摘要 (1) ABSTRACT (1) 目录 (1)物流配送最优路径规划
快速流分类算法研究综述
最小生成树的Kruskal算法实现
path planning 移动机器人路径规划方法综述
启发式优化算法综述
分类算法综述
移动机器人路径规划技术综述
数据挖掘中的文本挖掘的分类算法综述