使用Crestron Toolbox方法
使用Crestron Toolbox进行程序(界面)传输
使用Crestron Toolbox 向主机上传程序:
1.连接端口设置:
设备连接设置有System info和Network Device Tree两种窗口模式可供选择,均可连接到设备
A.System info:
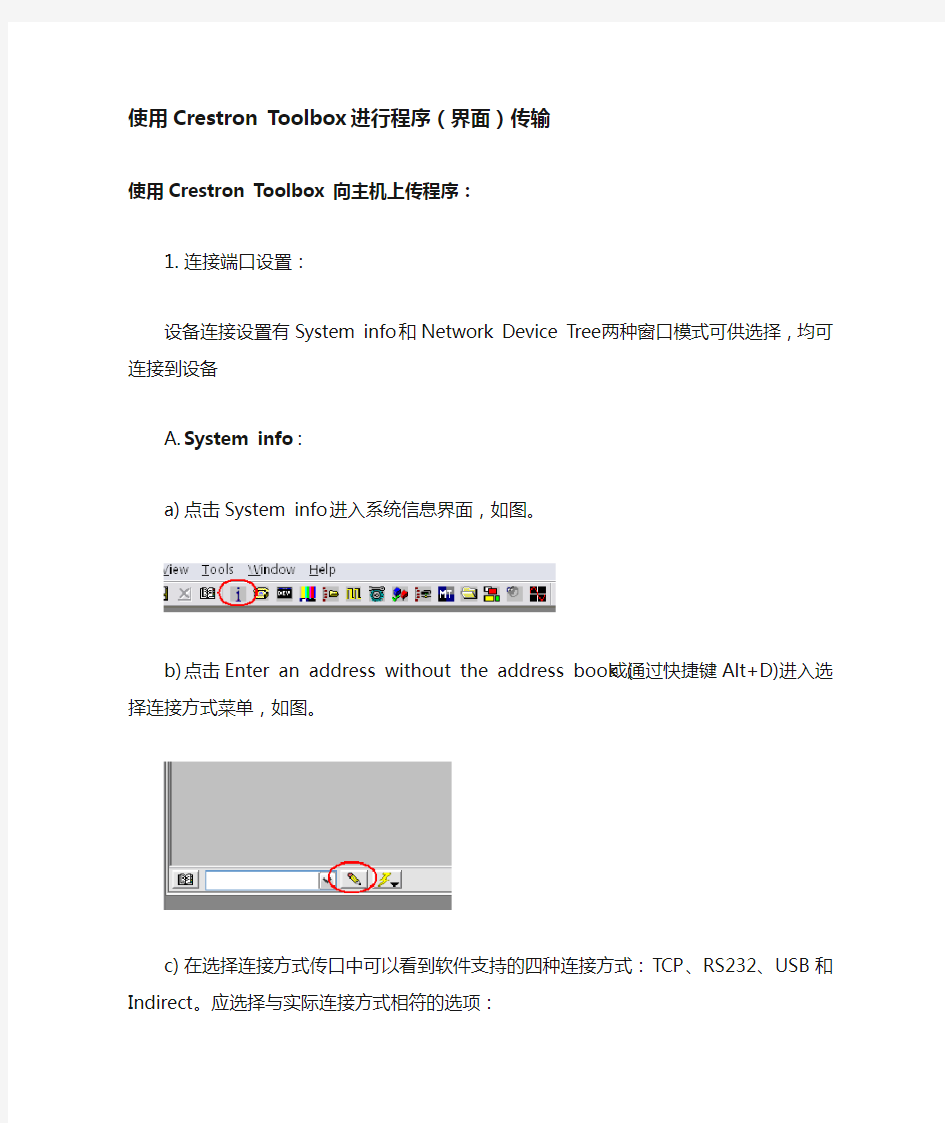
a)点击System info进入系统信息界面,如图。
b)点击Enter an address without the address book (或通过快捷键Alt+D)进入
选择连接方式菜单,如图。
c)在选择连接方式传口中可以看到软件支持的四种连接方式:TCP、RS232、
USB和Indirect。应选择与实际连接方式相符的选项:
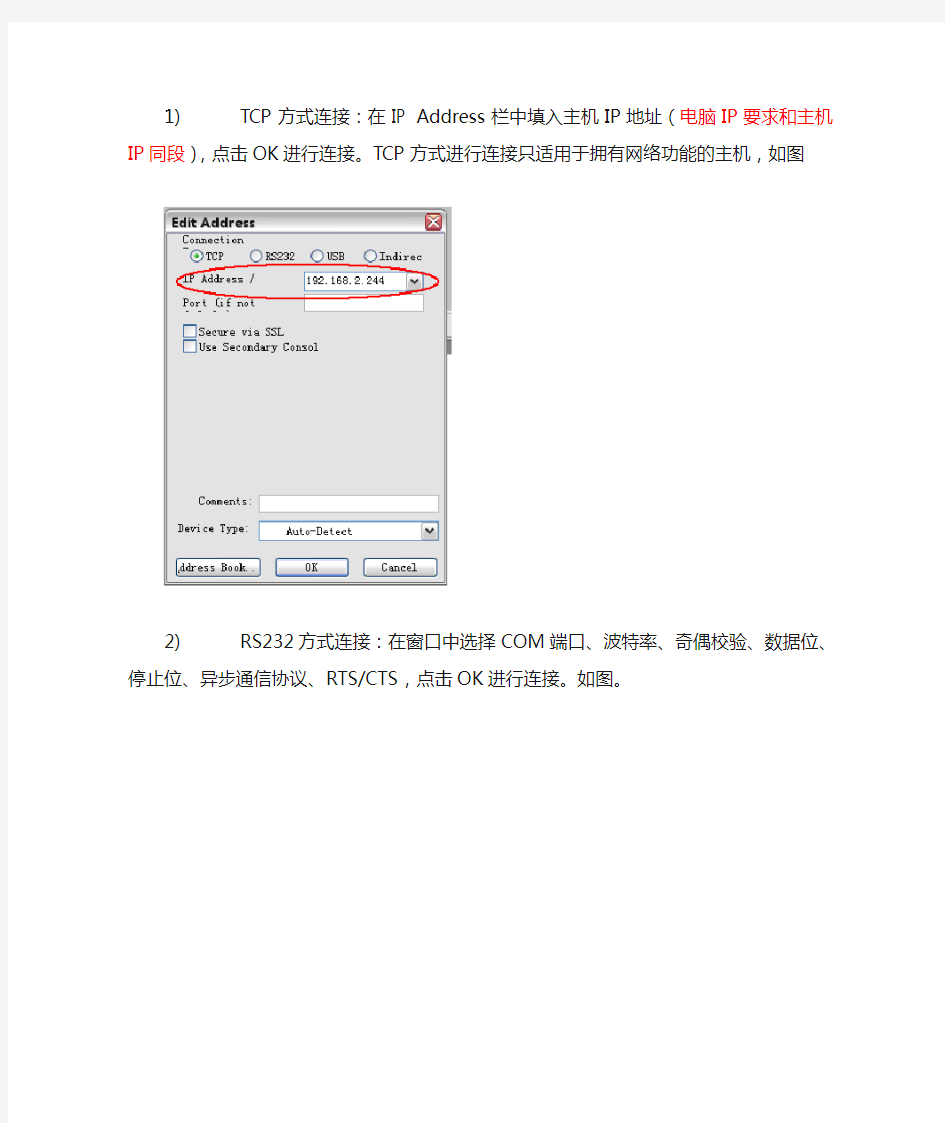
1)TCP方式连接:在IP Address栏中填入主机IP地址(电脑IP要
求和主机IP同段),点击OK进行连接。TCP方式进行连接只适
用于拥有网络功能的主机,如图
2)RS232方式连接:在窗口中选择COM端口、波特率、奇偶校验、
数据位、停止位、异步通信协议、RTS/CTS,点击OK进行连接。
如图。
3)USB方式连接:通过USB线将主机和电脑连接既可自动识别。
4)Indirect方式连接:这种连接方式主要用于连接级联中的从机或
其他Cresnet设备,需要选择所需要传程设备的Cresnet ID
https://www.360docs.net/doc/4e940711.html,work Device Tree:
点击Network Device Tree进入Network Device Tree窗口
Network Device Tree同样拥有TCP、RS232、USB和Indirect四种连接方式可选,具体设置方式请参见System info窗口各连接方式的设置方法。
2.上传程序:
A.System info:
1)当主机与电脑通过以上四种方法中任意一种方式连接后,窗口中将
会显示出主机信息。窗口右下角会显示连接状态。
2)点击Program栏中的,进入传程界面
通过Browse选择所要上传的程序,Erase可以擦去主机中的现有程序,Retrieve可将主机中的现有程序进行备份(备份文件为压缩后的文件,不能进行编辑,上传文件不能存在中文目录等资源),点击Send即可向主机上传程序。
https://www.360docs.net/doc/4e940711.html,work Device Tree:
1)当主机与电脑通过任意一种方式连接后,窗口中将会显示出主机信
息。窗口右下角会显示连接状态。
2)右键点击主机名,选择Functions > SIMPL Program 进入传程界面
3)通过Browse选择所要上传的程序,Erase可以擦去主机中的现有程
序,Retrieve可将主机中的现有程序进行备份(备份文件为压缩后的文件,不能进行编辑),点击Send即可向主机上传程序。
使用Crestron Toolbox 向触摸屏上传界面:
1.向有线触摸屏上传界面
a)向连接在Cresnet上的有线触摸屏上传界面
点击Network Device Tree进入Network Device Tree窗口
在设备树状图上找到要上传界面的触摸屏,例如下图中Cresnet ID 为03的TPS-12L。右键点击树状图中要上传界面的Cresnet ID >
Funcitons > Project,会出现传屏界面。
Browse选择所要上传的界面位置,Send即可上传到触摸屏。
b)向通过RS232传屏线连接的有线触摸屏上传界面
点击System info进入系统信息界面
System info窗口中会显示出所连接触摸屏的系统信息
点击Display Project中的,进入传程界面,Browse选择要上传的界面,点击Send上传。
c)向通过LAN连接的触摸屏上传界面
在IP Address栏中填入主机IP地址(电脑IP要求和主机IP同段),
点击OK进行连接。TCP方式进行连接只适用于拥有网络功能的触
摸屏,如图。
2.向无线RF触摸屏上传界面
使用传屏线将无线RF触摸屏连接进Cresnet,之后使用Network Device Tree上传界面。(方法参看Network Device Tree下向有线触摸屏
上传界面)
3.向特殊触摸屏上传界面
ML-600:使用随机配备的传屏线将ML-600与电脑相连,点击System
info进入系统信息界面,选择RS232方式连接,并将下拉菜单Device Type
选择到* ML-600,即可出现ML-600系统信息窗口,点击Display Project
中的,进入传程界面,Browse选择要上传的界面,点击Send上传。
MT-1000C:使用随机配备的传屏线将MT-1000C与电脑相连,点击System info进入系统信息界面,选择USB方式连接,并将下拉菜单Device Type选择到* MT-1000C,即可出现MT-1000C系统信息窗口,点击
Display Project中的,进入传程界面,Browse选择要上传的界面,点击Send上传。(注意:连接前需要安装随机配送光盘中的Microsoft ActiveSync同步软件)
TPMC-4X:
i.方法一USB:
使用随即配送的USB连接线将TPMC-4X与电脑相连,点击System info进入系统信息界面,选择USB方式连接,
并将下拉菜单Device Type选择到* TPMC-4X,即可出现
TPMC-4X系统信息窗口,点击Display Project中的,进入
传程界面,Browse选择要上传的界面,点击Send上传。(注
意:连接前需要安装随机配送光盘中的Microsoft ActiveSync
同步软件)
ii.方法二Wi-Fi:
TPMC-4X需要使用IEEE 802.11bWi-Fi网络。从左至右依次触发触屏中部的四个硬按钮重复两次进入设置菜单,设
置TPMC-4X的IP地址。
点击Toolbox中的System info进入系统信息界面,在TCP菜单中的IP Address栏中填入TPMC-4X的IP地址,点
击OK,在网络畅通的情况下即可进入TPMC-4X系统信息
窗口。点击Display Project中的,进入传程界面,Browse
选择要上传的界面,点击Send上传。
TPMC-8X:
TPMC-8X后务必先将Firmware版本升级至1.00.00.41。从左至右依次触发触屏下部的四个硬按钮并重复两次,触摸屏即可进入设置界面。
设置TPMC-8X的IP地址。
点击Toolbox中的System info进入系统信息界面,在TCP菜单中的IP Address栏中填入TPMC-8X的IP地址,点击OK,在网络畅通
从Simpl Windows 中启动Crestron Toolbox
1.新建工程,选定主机及其他设备,编写程序。
2.点击Convert/Compile(或通过快捷键F12)对程序进行编译。如图。
3.软件会提示是否在对函数进行编译之前对程序进行保存,这里选择“是(Y)”,
选择储存路径,对程序命名(注意:储存目录及文件名中不要出现中文字符)。
如图。
序。这里选择“否(N)”,准备使用Toolbox进行程序上传,如图。
5.点击Toolbox启动Crestron Toolbox软件,如图。
从VisionTools Pro-e 中启动Crestron Toolbox
1.新建一个工程,制作页面,按下快捷键F12对界面进行编译。编译前会提示
保存。
2.点击Toolbox进入Crestron Toolbox,如图。
各种测量仪器的使用方法
各种测量仪器的使用方法 水准仪及其使用方法 高程测量就是测绘地形图的基本工作之一,另外大量的工程、建筑施工也必须量测地面高程,利用水准仪进行水准测量就是精密测量高程的主要方法。 一、水准仪器组合: 1、望远镜 2、调整手轮 3、圆水准器 4、微调手轮 5、水平制动手轮 6、管水准器 7、水平微调手轮 8、脚架 二、操作要点: 在未知两点间,摆开三脚架,从仪器箱取出水准仪安放在三脚架上,利用三个机座 螺丝调平,使圆气泡居中,跟着调平管水准器。水平制动手轮就是调平的,在水平镜内通过三角棱镜反射,水平重合,就就是平水。将望远镜对准未知点(1)上的塔尺,再次调平管水平器重合,读出塔尺的读数(后视),把望远镜旋转到未知点(2)的塔尺,调整管水平器,读出塔尺的读数(前视),记到记录本上。 计算公式:两点高差=后视-前视。 三、校正方法: 将仪器摆在两固定点中间,标出两点的水平线,称为a、b线,移动仪器到固定点一端,标出两点的水平线,称为a’、b ’。计算如果a-b≠a’-b’时,将望远镜横丝对准偏差一半的数值。用校针将水准仪的上下螺钉调整,使管水平泡吻合为止。重复以上做法,直到相等为止。
四、水准仪的使用方法 水准仪的使用包括:水准仪的安置、粗平、瞄准、精平、读数五个步骤。 1、安置 安置就是将仪器安装在可以伸缩的三脚架上并置于两观测点之间。首先打开三脚架并使高度适中,用目估法使架头大致水平并检查脚架就是否牢固,然后打开仪器箱,用连接螺旋将水准仪器连接在三脚架上。 2、粗平 粗平就是使仪器的视线粗略水平,利用脚螺旋置园水准气泡居于园指标圈之中。具体方法用仪器练习。在整平过程中,气泡移动的方向与大姆指运动的方向一致。 3、瞄准 瞄准就是用望远镜准确地瞄准目标。首先就是把望远镜对向远处明亮的背景,转动目镜调焦螺旋,使十字丝最清晰。再松开固定螺旋,旋转望远镜,使照门与准星的连接对准水准尺,拧紧固定螺旋。最后转动物镜对光螺旋,使水准尺的清晰地落在十字丝平面上,再转动微动螺旋,使水准尺的像靠于十字竖丝的一侧。 4、精平 精平就是使望远镜的视线精确水平。微倾水准仪,在水准管上部装有一组棱镜,可将水准管气泡两端,折射到镜管旁的符合水准观察窗内,若气泡居中时,气泡两端的象将符合成一抛物线型,说明视线水平。若气泡两端的象不相符合,说明视线不水平。这时可用右手转动微倾螺旋使气泡两端的象完全符合,仪器便可提供一条水平视线,以满足水准测量基本原理的要求。注意?气泡左半部份的移动方向,总与右手大拇指的方向不一致。 5、读数 用十字丝,截读水准尺上的读数。现在的水准仪多就是倒象望远镜,读数时应由上而下进行。先估读毫米级读数,后报出全部读数。 注意,水准仪使用步骤一定要按上面顺序进行,不能颠倒,特别就是读数前的符合水泡调整,一定要在读数前进行。 五、水准仪的测量 测定地面点高程的工作,称为高程测量。高程测量就是测量的基本工作之一。高程测量按所使用的仪器与施测方法的不同,可以分为水准测量、三角高程测量、GPS高程测量与气压高程测量。水准测量就是目前精度最高的一种高程测量方法,它广泛应用于国家高程控制测量、工程勘测与施工测量中。 水准测量的原理就是利用水准仪提供的水平视线,读取竖立于两个点上的水准尺上的读数,来测定两点间的高差,再根据已知点高程计算待定点高程。 如下图所示,在地面上有A、B两点,已知A点的高程为HA、为求B点的高程HB,在A、B两点之间安置水准仪,A、B两点各竖立一把水准尺,通过水准仪的望远镜读取水平视线分别在A、B两点水准尺上截取的读数为a与b,可以求出A、B两点问的高差为:
恐龙工具箱使用说明
恐龙工具箱V2.2使用说明 作者:邹波 恐龙工具箱主要针对地质行业开发,部分通用功能其它行业也可以使用。本工具箱最新版本为2.2版,在CAD平台下使用,菜单及工具条界面大致如下,随版本变化有所更新: 安装步骤如下: 1、安装:安装前请先关闭CAD,再运行这个程序 ,按提示操作即安装完成。 2、成功: 下面你可以象使用CAD标准命令一样使用这些功能了。 3、卸载: 当你不想使用恐龙工具箱时,运行安装路径下面这个程序即完成程序卸载。 4、说明: 本版本工具箱现在共提供91个扩展命令(功能)供大家使用,使用它能极大提高绘图效率。详见更新说明及恐龙工具箱命令名称一览表。 为了方便使用CAD软件,另外增加5个常用ET工具的图标(需安装ET工具支持,安装方法见下面示意图。也可以不安装,不影响其它功能的使用。ET工
具附带图层管理等功能,将让你操作图层得心应手,推荐安装。),增加9个CAD 默认设置没有显示出来,但又常用的图标。 本工具箱是在XP系统及CAD2004环境下开发制作的,在与该环境相近的环境下能达到最优的效果。理论上在所有CAD版本下均可使用。至于是CASS、天正、理正等环境下能否使用,请自行试验。 安装前,请参看《安装演示图》;使用前,请参看《功能演示》里各个命令的操作示范。本程序还自带了570种岩石花纹,你也可以自行添加其它岩石花纹。本程序附带了部分功能的演示数据或数据模板,请在安装路径下查看。 本工具箱功能全部免费使用,欢迎大家下载使用,有任何问题及建议请与我联系。联系方式:QQ群:74906452,273920298。验证请填:恐龙工具箱。本程序中部分功能为网络上收集,版权归相应的个人或公司。大部分功能为本人编写,版权属邹波所有,欢迎大家使用!邹波在此对帮助、支持过我的朋友表示感谢! 2013.5.25
服务器工具箱使用说明
目录 第1章服务器工具箱简介 (3) 第2章 2.服务器注册 (3) 2.1 安装加密狗驱动 (3) 2.2 生成文件 (4) 2.3 添加授权文件 (4) 2.4 查看授权信息 (5) 第3章服务器站点及授权管理 (5) 3.1 优先站点管理 (6) 3.1.1 修改名称、备注 (6) 3.1.2 新建 (7) 3.1.3 启用 (7) 3.1.4 停用 (7) 3.1.5 删除 (7) 3.1.6 刷新 (7) 3.1.7 重用 (7) 3.2 普通站点管理 (7) 第4章帐套管理 (7) 第5章配置信息设置 (8) 第6章退出服务器工具箱 (9)
第1章服务器工具箱简介 服务器工具箱用于配置道科.蓝途erp服务器,主要用于进行计算机授权控制,服务器注册,授权信息查看,帐套管理,配置信息设置。如下图所示: 第2章 2.服务器注册 安装完毕服务器程序之后,打开服务器工具箱,输入用户名和密码(默认的用户是SuperUser,密码是123456)登录服务器工具箱。 2.1 安装加密狗驱动 在登录服务器工具箱之后,切换到注册服务器页面,可以查看到如下图所示的界面,道科蓝途ERP的授权以硬件加密狗为主要验证器件,因此授权需要安装加密狗驱动。点击图片上的安装加密狗驱动,提示安装成功之后,请插入加密狗,系统会自动识别加密狗。
2.2 生成文件 授权信息需要服务器与加密狗的信息,因此,生成文件所生成的文件包含了服务器的硬件信息,如MAC地址,主板编号,CPU编号,硬盘编号等。这些信息会包含在一个加密的信息文件内部。点击生成文件之后,程序会把生成好的信息文件放在C盘根目录(C:\RegistInfo.xml)。得到这个文件之后即可将该文件发送回道科公司进行注册。道科公司根据这个文件生成两个授权文件(Serial.no,https://www.360docs.net/doc/4e940711.html,),并将这两份文件传递回来。 2.3 添加授权文件 在得到两个授权文件(Serial.no,https://www.360docs.net/doc/4e940711.html,)之后,点击添加授权文件,如下图所示: 分别添加两个授权文件之后,授权完毕。关闭服务器工具箱用于更新服务器的授权信息。 注意:
840D的toolbox内容说明
TOOLBOX内容说明 下面是以TOOLBOX V6.5说明其中内容,希望对用户有所帮助。 下图是TOOLBOX光盘的所有目录。 其中810D目录中存放的是810D早期系统软件使用的TOOLBOX;840D目录中存放的是840D早期系统软件使用的TOOLBOX。(子目录的序号对应CCU/NCU系统软件版本)。从CCU/NCU系统软件版本V4.3以后,TOOLBOX不再区分810D和840D,统一为8X0D。
上图是根目录下的内容,用户如果安装TOOLBOX 应运行根目录下的SETUP.EXE。SIEMENSE.TXT是光盘内容介绍;UPDATE_E.DOC是系统升级步骤说明。 安装的时候,有四项内容可选择安装。 PLC Basic Program for 8x0D V6.5—-PLC基本程序,必须安装。 SINUMERIK Add-on for STEP7 V5.2.1.0—-硬件信息,必须安装。 NCVar Selector—NC变量选择器,如果用到PLC读写NC变量的功能(FB2/FB3), 需要安装;否则,可不安装。 PLC Symbols Generator—PLC符号生成器(具体内容参看symbol_generator.doc),可不装
一.下图是TOOLBOX V6.5的内容。 1.子目录BSP_PROG中存放的是一些PLC例程,其中 (带显示屏的)手持操作单元的标准例程 mini手持的标准例程 2.子目录PLC.INF中有两个文件: AWLVERS.EXE—STEP7 ASCII源代码版本管理(由于使用的机会比较小,下面的说明没有 翻译) The DOS program AWLVERS.EXE is used for the version generation of several similar projects (e.g. basic program 840D, 810D and FMNC or for combining modular machine programs). The aim of this program is the simple generation of STEP 7 AWL programs from tested source files (e.g. file name "REVOLVER.SRC"). A source file contains, for example, several similar machine entities with the same FC, FB and DB numbers which are, however only used as alternatives. The source file is identified by version switches (different keywords of max. 18 characters) for the individual machine units. By entering one or several keywords when generating a version you can create an AWL program for that/those machine unit(s) . Procedure for creating a source file: A common source file is to be created for all the versions (e.g. FILE.SRC). Specific differences are identified in the file by ~Version~ followed immediately by a carriage return. The term Version here is a joker for any name which can be up to 18 characters long. From
测绘仪器全站仪的使用
测绘仪器全站仪的使用 内容:了解全站仪的分类、等级、主要技术指标;掌握全站仪的基本操作,测角、测边、测三维坐标和三维坐标放样的原理和操作方法;了解全站仪的对边测量、悬高测量、面积测量等方法。 重点:全站仪的基本操作,测角、测边、测三维坐标和三维坐标放样的原理和操作方法。难点:全站仪测三维坐标和三维坐标放样的原理和操作方法。 教学方法:采取演示法教学。讲解拓普康全站仪使用,在课堂上每讲一项功能后,利用多媒体课室的优点,现场演示一次,并将操作过程通过投影仪投影到屏幕上,起到直观、形象的效果,使学生能迅速掌握全站仪的使用。 §7.1 全站仪(total station)的功能介绍 随着科学技术的不断发展,由光电测距仪,电子经纬仪,微处理仪及数据记录装置融为一体的电子速测仪(简称全站仪)正日臻成熟,逐步普及。这标志着测绘仪器的研究水平制造技术、科技含量、适用性程度等,都达到了一个新的阶段。 全站仪是指能自动地测量角度和距离,并能按一定程序和格式将测量数据传送给相应的数据采集器。全站仪自动化程度高,功能多,精度好,通过配置适当的接口,可使野外采集的测量数据直接进入计算机进行数据处理或进入自动化绘图系统。与传统的方法相比,省去了大量的中间人工操作环节,使劳动效率和经济效益明显提高,同时也避免了人工操作,记录等过程中差错率较高的缺陷。 全站仪的厂家很多,主要的厂家及相应生产的全站仪系列有:瑞士徕卡公司生产的TC 系列全站仪;日本TOPCN (拓普康)公司生产的GTS 系列;索佳公司生产的SET 系列;宾得公司生产的PCS 系列;尼康公司生产的DMT 系列及瑞典捷创力公司生产的GDM 系列全站仪。我国南方测绘仪器公司90 年代生产的NTS 系列全站仪填补了我国的空白,正以崭新的面貌走向国内国际市场。 全站仪的工作特点: 1、能同时测角、测距并自动记录测量数据; 2、设有各种野外应用程序,能在测量现场得到归算结果; 3、能实现数据流; 一、TOPCON 全站仪构造简介 图1为宾得全站仪PTS-V2 ,图2为尼康C-100 全站仪,图3为智能全站仪GTS-710,图4为蔡司Elta R系列工程全站仪,图5为徕卡TPS1100系列智能全站仪。 二、全站仪的功能介绍 1、角度测量(angle observation) (1)功能:可进行水平角、竖直角的测量。 (2)方法:与经纬仪相同,若要测出水平角∠AOB ,则: 1)当精度要求不高时: 瞄准A 点——置零(0 SET )——瞄准B 点,记下水平度盘HR 的大小。 2)当精度要求高时:——可用测回法(method of observation set )。 操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(H SET )。 2、距离测量(distance measurement )
matlab潮流计算工具箱使用手册
MATPOWER A M ATLAB? Power System Simulation Package Version 3.2 September 21, 2007 User’s Manual Ray D. Zimmerman Carlos E. Murillo-Sánchez rz10@https://www.360docs.net/doc/4e940711.html, carlos_murillo@https://www.360docs.net/doc/4e940711.html, ? 1997-2007 Power Systems Engineering Research Center (PS ERC) School of Electrical Engineering, Cornell University, Ithaca, NY 14853
Table of Contents Table of Contents (2) 1Introduction (3) 2Getting Started (4) 2.1System Requirements (4) 2.2Installation (4) 2.3Running a Power Flow (4) 2.4Running an Optimal Power Flow (4) 2.5Getting Help (4) 3Technical Reference (6) 3.1Data File Format (6) 3.2Modeling (8) 3.3Power Flow (11) 3.4Optimal Power Flow (12) 3.4.1AC OPF Formulation (13) 3.4.2DC OPF Formulation (21) 3.5Unit Decommitment Algorithm (22) 3.6MATPOWER Options (22) 3.7Summary of the Files (28) 4Acknowledgments (33) 5References (33) Appendix A: Notes on LP-Solvers for M ATLAB (34) Appendix B: Additional Notes (34) Appendix C: Auction Code (35)
测量仪器说明书
测量仪器说明书
目录 一、GeoPluse浅地层剖面仪操作规程 (1) 1、仪器简介 (1) 1)功能简介 (1) 2)系统配置 (1) 2、GeoPluse浅地层剖面仪系统配置连接 (1) 1)换能器安装 (1) 2)5430A收发机与5210A接收机连接 (2) 3)接通电源 (4) 3、5210A与5430A收发机功能键简介 (4) 1)5430A收发机功能键简介 (5) 2)5210A接收机功能键简介 (5) 4、数据采集后处理 (7) 二、Knudsen 320Ms双频测深仪操作规程 (14) 1、仪器简介 (14) 1)工作原理 (14) 2)功能简介 (14) 2、系统配置连接 (15) 1)换能器连接 (15) 2)Knudsen 320Ms主机与电脑的连接 (15) 3)接通电源 (16) 3、Knudsen 320Ms菜单结构 (16) 4、数据采集后处理 (21) 三、TideMaster型潮位仪操作规程 (29) 1、仪器硬件设置 (29) 1)主要设备仪器 (29) 2)操作及安装使用 (31)
2、临时验潮站站址选择原则 (31) 3、仪器的软件设置 (31) 四、GPS操作规程 (41) 1、工作原理 (41) 2、基准站操作 (41) 1)仪器架设 (41) 2)用手簿启动基准站 (44) 3、Trimble SPS461 GPS罗经设置及使用说明46 1)网络连接方法设置461 (46) 2)SPS461 信标机定位定向仪液晶屏设置说明 (51) 五、海底管线铺设导航、定位技术 (64) 1、GPS定位原理 (64) 2、海洋定位技术 (65) 1)差分GPS技术 (65) 2)信标差分技术 (65) 3、GPS 控制网及基准站的设立解算 (66) 1)基准站的选定和设立 (66) 2)GPS控制网的布设、施测和解算 (67) 3)测区的坐标七参数的解算 (68) 4)利用转化参数转换坐标 (69) 4、海底管道施工导航定位技术 (69) 1)海底管线临时定位桩施工 (69) 2)铺管船法海底管线铺设导航定位 (71) 六、海底管线预、后调查方案 (75) 1、概述 (75) 1)项目概述 (75) 2)海底管线状态简介 (75) 2、使用检测仪器进行海底管线铺设后调查内容76 1)海底管线外观检查 (76)
测量仪器地使用方法
水准仪及其使用方法 高程测量是测绘地形图的基本工作之一,另外大量的工程、建筑施工也必须量测地面高程,利用水准仪进行水准测量是精密测量高程的主要方法。 一、水准仪器组合: 1.望远镜 2.调整手轮 3.圆水准器 4.微调手轮 5.水平制动手轮 6.管水准器 7.水平微调手轮 8.脚架 二、操作要点: 在未知两点间,摆开三脚架,从仪器箱取出水准仪安放在三脚架上,利用三个机座螺丝调平,使圆气泡居中,跟着调平管水准器。水平制动手轮是调平的,在水平镜内通过三角棱镜反射,水平重合,就是平水。将望远镜对准未知点(1)上的塔尺,再次调平管水平器重合,读出塔尺的读数(后视),把望远镜旋转到未知点(2)的塔尺,调整管水平器,读出塔尺的读数(前视),记到记录本上。 计算公式:两点高差=后视-前视。 三、校正方法: 将仪器摆在两固定点中间,标出两点的水平线,称为a、b线,移动仪器到固定点一端,标出两点的水平线,称为a’、b ’。计算如果a-b≠a’-b’时,将望远镜横丝对准偏差一
半的数值。用校针将水准仪的上下螺钉调整,使管水平泡吻合为止。重复以上做法,直到相等为止。 四、水准仪的使用方法 水准仪的使用包括:水准仪的安置、粗平、瞄准、精平、读数五个步骤。 1. 安置 安置是将仪器安装在可以伸缩的三脚架上并置于两观测点之间。首先打开三脚架并使高度适中,用目估法使架头大致水平并检查脚架是否牢固,然后打开仪器箱,用连接螺旋将水准仪器连接在三脚架上。 2. 粗平 粗平是使仪器的视线粗略水平,利用脚螺旋置园水准气泡居于园指标圈之中。具体方法用仪器练习。在整平过程中,气泡移动的方向与大姆指运动的方向一致。 3. 瞄准 瞄准是用望远镜准确地瞄准目标。首先是把望远镜对向远处明亮的背景,转动目镜调焦螺旋,使十字丝最清晰。再松开固定螺旋,旋转望远镜,使照门和准星的连接对准水准尺,拧紧固定螺旋。最后转动物镜对光螺旋,使水准尺的清晰地落在十字丝平面上,再转动微动螺旋,使水准尺的像靠于十字竖丝的一侧。 4. 精平 精平是使望远镜的视线精确水平。微倾水准仪,在水准管上部装有一组棱镜,可将水准管气泡两端,折射到镜管旁的符合水准观察窗内,若气泡居中时,气泡两端的象将符合成一抛物线型,说明视线水平。若气泡两端的象不相符合,说明视线不水平。这时可用右手转动微倾螺旋使气泡两端的象完全符合,仪器便可提供一条水平视线,以满足水准测量基本原理的要求。注意?气泡左半部份的移动方向,总与右手大拇指的方向不一致。 5. 读数 用十字丝,截读水准尺上的读数。现在的水准仪多是倒象望远镜,读数时应由上而下进行。先估读毫米级读数,后报出全部读数。 注意,水准仪使用步骤一定要按上面顺序进行,不能颠倒,特别是读数前的符合水泡调整,一定要在读数前进行。 五、水准仪的测量 测定地面点高程的工作,称为高程测量。高程测量是测量的基本工作之一。高程测量按所使用的仪器和施测方法的不同,可以分为水准测量、三角高程测量、GPS高程测量和气压高程测量。水准测量是目前精度最高的一种高程测量方法,它广泛应用于国家高程控制测量、工程勘测和施工测量中。 水准测量的原理是利用水准仪提供的水平视线,读取竖立于两个点上的水准尺上的读数,来测定两点间的高差,再根据已知点高程计算待定点高程。 如下图所示,在地面上有A、B两点,已知A点的高程为HA、为求B点的高程HB,在A、B 两点之间安骨水准仪,A、B两点亡各竖立一把水准尺,通过水准仪的望远镜读取水平视线分别在A、B两点水准尺上截取的读数为a和b,可以求出A、B两点问的高差为:
robotic+toolbox+使用说明
robotic toolbox for matlab工具箱 1. PUMA560的MATLAB仿真 要建立PUMA560的机器人对象,首先我们要了解PUMA560的D-H参数,之后我们可以利用Robotics Toolbox工具箱中的link和robot函数来建立 PUMA560的机器人对象。 其中link函数的调用格式: L = LINK([alpha A theta D]) L =LINK([alpha A theta D sigma]) L =LINK([alpha A theta D sigma offset]) L =LINK([alpha A theta D], CONVENTION) L =LINK([alpha A theta D sigma], CONVENTION) L =LINK([alpha A theta D sigma offset], CONVENTION) 参数CONVENTION可以取‘standard’和‘modified’,其中‘standard’代表采用标准的D-H参数,‘modified’代表采用改进的D-H参数。参数‘alpha’代表扭转角,参数‘A’代表杆件长度,参数‘theta’代表关节角,参数‘D’代表横距,参数‘sigma’代表关节类型:0代表旋转关节,非0代表移动关节。另外LINK还有一些数据域: LINK.alpha %返回扭转角 LINK.A %返回杆件长度 LINK.theta %返回关节角 LINK.D %返回横距 LINK.sigma %返回关节类型 LINK.RP %返回‘R’(旋转)或‘P’(移动) LINK.mdh %若为标准D-H参数返回0,否则返回1 LINK.offset %返回关节变量偏移 LINK.qlim %返回关节变量的上下限[min max] LINK.islimit(q) %如果关节变量超限,返回-1, 0, +1 LINK.I %返回一个3×3 对称惯性矩阵 LINK.m %返回关节质量
测量仪器的使用及测量方法
1适用范围 规定关于测量仪器的使用?测量方法。 2测量的概要 2‐1 关于测量与检查 测量就是指将物体的形状、尺寸用测量仪器及装置进行测量使其量化。 检查就是指把对物体测量的结果(数值)与判定用的标准值进行比较,来判断该物体就是否合格。 2‐2 关于测量误差 在测量物体的形状、尺寸时,实际值与测量值或近似值之间会有出入,另外即使在同一条件下,每次测量的值都可能不同,这个就就是测量误差。 测量误差大致可以区分为,由测量者导致的误差、测量误差、由外部条件导致的误差、偶然误差等。 ①由测量者导致的误差 在读取测量值时,因测量者的性格?倾向造成的误差,也可以讲就是因测量者的测量能力的大小、对测量感觉的不同而造成的误差。 ②测量误差 因测量仪器的结构原因所产生的误差,由于摩擦、测量压力等的变化及没有调整好各部分机构而造成的误差。 ③由外部条件导致的误差 由于室温、湿度、照度、震动等测量环境的变化影响而造成的误差。 ④偶然误差 各种不确定的细小因素,在一定的条件下,相互作用而造成的误差。 2‐3 测量仪器使用上的注意事项 ①要选择与测量内容相符的测量仪器。 不同规格型号的测量仪器,其测量的方法、测量的范围、精度等都就是不同的,所以必须选择合适的规格型号的测量仪器。 ②要小心的使用。 测量仪器就是结构精密的仪器,要注意不要使其从高处掉下、不要使其受到挤压、震动与冲撞。 ③使用时要经常保持干净。 要注意清除测量面、滑动面的垃圾、灰尘,防止生锈。 ④要测量静止的物体。 如果测量移动的物体的话,会引起测量仪器的破损,同时也不能进行正确的测量。 ⑤要考虑因视差引起的误差。 由于读取刻度时眼睛的位置不同,会造成很大的误差,所以要从正上方读取刻度。 ⑥开始测量时必须要进行仪器的检查。 要检查测量面、滑动面、零点位置。 ⑦要注意在标准温度下进行测量。 要考虑到被测量物的尺寸会因温度的变化而改变,要考虑温度变化造成的误差。 ⑧要注意测量面的磨损。 要注意测量面、滑动面容易因接触而产生磨损。 ⑨要定期进行校正。 为了能够稳定地进行测量,要定期进行校正、确认精度。 ⑩要保管在环境变化小的场所。 要保管在低湿、恒温、没有震动的场所。 3测量仪器的概要?使用?测量方法 3‐1游标卡尺 1)游标卡尺的概要 游标卡尺(Mosel型)能够进行外测、内测、深度的测量,一般用于测量精度为1/10~1/20mm左右的物品。 2)游标卡尺(Mosel型)各部的名称 用于测量内侧内量爪
工具箱使用说明
招投标工具箱使用手册 友情提示:如果您已经可以熟练使用招投标工具箱制作招投标文件,您可以只阅读注意事项部分。如果你不熟悉招投标工具箱的使用,建议从头阅读本说明。 一、工具箱的下载 软件下载页面:https://www.360docs.net/doc/4e940711.html,/gcc/down.aspx,版本变更情况以软件下载页面的备注说明为准。 二、软件的安装与卸载 软件的卸载十分简单,只需在‘开始->程序’菜单中找到‘招投标工具箱->卸载招投标工具箱’,即可运行软件的卸载程序。系统运行过程中产生的部分文件仍然会留在本机的安装路径下,需要通过手工删除,方法是:找到程序的安装路径,将整个flyztb文件夹完全删掉。通过如上操作,即可完成软件卸载(注意,程序的安装路径可以通过如下操作找到:在未卸载之前,对准桌面的快捷方式点右键->属性->查找目标)。如果在装有招投标工具箱的机器上重新安装时,要遵循先卸载后安装的原则。软件的安装操作只需按照向导提示进行即可完成。在程序安装即将完成时,系统会提示用户安装四个插
件,如下图所示: (图1 模板选择窗口) 需要注意的是,如果是初次安装本软件,四个选项必须全选。如果本机安装过招投标工具箱,则后两项可不选。可通过软件启动窗口的标题栏上的版本及更新日期信息来确定软件的更新是否成功。 三、软件的使用 3.1 主要操作界面介绍 招投标工具箱提供招标公告编制、招标文件编制和投标文件编制的功能;这三个功能虽然不同,但互为联系。例如公告文件进一步充实就形成了招标文件,招标文件可以切换形成投标文件。把这三个功能集成在一个程序里,其操作界面非常一致便于学习掌握。
通过双击桌面菜单或者通过启动菜单启动《招投标工具软件》后,进入功能选择操作界面,如果是新建招标文件,则按照下图所示的1-3步进行 (图2 模板选择窗口) 如果是对已有的招标文件进行编辑,则按照下图所示的1-2步进行操作,特别地,如果在‘打开已有的工程项目’列表中没有列出所要编辑的文件,则请按照下图所示的3-7步进行操作。
MATLAB中ROBOTICS TOOLBOX的函数解说
matlab中robotics toolbox的函数解说 1.PUMA560的MATLAB仿真 要建立PUMA560的机器人对象,首先我们要了解PUMA560的D-H参数,之后我们可以利用Robotics Toolbox工具箱中的link和robot函数来建立PUMA560的机器人对象。 其中link函数的调用格式: L=LINK([alpha A theta D]) L=LINK([alpha A theta D sigma]) L=LINK([alpha A theta D sigma offset]) L=LINK([alpha A theta D],CONVENTION) L=LINK([alpha A theta D sigma],CONVENTION) L=LINK([alpha A theta D sigma offset],CONVENTION) 参数CONVENTION可以取‘standard’和‘modified’,其中‘standard’代表采用标准的D-H 参数,‘modified’代表采用改进的D-H参数。参数‘alpha’代表扭转角,参数‘A’代表杆件长度,参数‘theta’代表关节角,参数‘D’代表横距,参数‘sigma’代表关节类型:0代表旋转关节,非0代表移动关节。另外LINK还有一些数据域: LINK.alpha%返回扭转角 LINK.A%返回杆件长度 LINK.theta%返回关节角 LINK.D%返回横距 LINK.sigma%返回关节类型 LINK.RP%返回‘R’(旋转)或‘P’(移动) LINK.mdh%若为标准D-H参数返回0,否则返回1 LINK.offset%返回关节变量偏移 LINK.qlim%返回关节变量的上下限[min max]
Toolbox中文使用说明(图例)
Toolbox使用说明 Toolbox是快思聪公司新近推出的一款集成多种调试功能于一体的工具软件,它可以实现多种硬件检测,调试功能。完全可替代Viewport实现相应的功能。它提供了有Text Console,SMW Program Tree,Network Device Tree,Script Manager,System Info,File Manager,Network Analyzer,Video Test Pattern多个检测调试工具,其中Text Console主要执行基于文本编辑的命令;SMW Program Tree主要罗列出相应Simpl Windows程序中设计到的相关快思聪设备,并可对显示出的相关设备进行效验,更新Firmware,上传Project 等操作;Network Device Tree主要使用于显示检测连接到Cresnet网络上相关设备,可对网络上设备进行ID 设置,侦测设备线路情况;Script Manager主要用于运行脚本命令;System Info则用于显示联机的控制系统软硬件信息,也可对相应信息进行修改,刷新;File Manager显示控制系统主机内存文件系统信息,可进行修改,建立等管理操作;Video Test Pattern则用于产生一个测试图调较屏幕显示;Network Analyzer用于检测连接到Cresnet网络上所有设备的通信线路情况。以上大致介绍了Toolbox中各工具软件的用途,下面将分别讲述一下各工具的实际用法。 首先按照提示信息将Toolbox安装到Crestron目录下,在PC开始菜单中找到Toolbox菜单项,激活显示如下图所示 状态栏 (图一)Toolbox运行窗口 可以看到,Toolbox运行窗口中分为菜单栏,工具栏,状态栏及显示窗口四部分。其中工具栏上所有快捷图标实现的功能都可对应的在菜单栏中找到相应选项。 1.
HACH仪器使用方法
HACH仪器使用方法、原理 一、HQ-30D溶解氧、PH测定仪 理论部分: 1.PH电极由电极系统和高阻抗系统组成。电极与待测溶液组成原电池,以毫伏计测量 点击之间的电位差,电位差经放大电路放大后,由电流表或数码管显示。 2.测定溶解氧所用电极是离子选择性电极,它是电化学的敏感体,电势与溶液中给定 离子活度的对数成正比. 使用方法: 1、PH值的测定 a.开机。按“EXIT”键,稍等。 b.仪器校准。按“cal(校准)”——放入1号校准液——按“READ(读数)”键。重 复至三个校准液都校准完毕。 c.样品测量。放入样品,按“READ(读数)”键,可测得结果。 d.关机。按“EXIT”键关机。 2、溶解氧的测定 换上溶解氧电极,放入溶液则可显示出数值。 二、Sension PH、电导率测定仪 一.理论部分: 1.PH电极由电极系统和高阻抗系统组成。电极与待测溶液组成原电池,以毫伏计测 量点击之间的电位差,电位差经放大电路放大后,由电流表或数码管显示。 2.测定电导率所用电极是离子选择性电极,它是电化学的敏感体,电势与溶液中给定 离子活度的对数成正比。 二.使用方法 1、PH值的测定 a.开机。按“EXIT”键,稍等。 b.按“6 PH mv”键调至PH档。 c.仪器校准。按“cal(校准)”——放入1号校准液——按“READ(读数)”键。重 复至三个校准液都校准完毕。 d.样品测量。放入样品,按“READ(读数)”键,可测得结果。 e.关机。按“EXIT”键关机。 3、电导率的测定 a.开机。按“EXIT”键,稍等。 b.按“con TDS sal”调至电导率档。 c.仪器校准。按“cal(校准)”键,放入校准液,按“READ”键,直至校准值接近1000。 d.电极放入待测液,按“READ”键,可读取数值。 关机。按“EXIT”键关机。 三. 2100P浊度分析仪 一.理论部分: 运用溶液的吸光度和其浑浊程度成正比。用分光光度计测定吸光度,通过放大电路放大,把吸光度信号转变为浓度信号。 二.使用方法: 1、开机。按“POWER”键,开机,稍等,直至出现“0000 NTU”。
Matlab摄像机标定工具箱的使用说明
摄像机标定工具箱 1.1 Matlab 摄像机标定工具箱 工具箱下载:https://www.360docs.net/doc/4e940711.html,/bouguetj/calib_doc/download/index.html 说明文档:https://www.360docs.net/doc/4e940711.html,/bouguetj/calib_doc/ 安装:将下载的工具箱文件toolbox_calib.zip 解压缩,将目录toolbox_calib 拷贝到Matlab 的目录下。 采集图像:采集的图像统一命名后,拷贝到toolbox_calib 目录中。命名规则为基本名和编号,基本名在前,后面直接跟着数字编号。编号最多为3位十进制数字。 1.1.1 标定模型 内参数标定采用的模型如式(1-1)所示,Brown 畸变模型式(1-2)所示。 ???? ??????=????????????????????=??????????11//100011100c c in c c c c y s x y x M z y z x v k u k k v u (1-1) 式中:(u , v )是特征点的图像坐标,(x c , y c , z c )是特征点在摄像机坐标系的坐标,k x 、k y 是焦距归一化成像平面上的成像点坐标到图像坐标的放大系数,k s 是对应于图像坐标u 、v 的摄像机的x 、y 轴之间不垂直带来的耦合放大系数,(u 0, v 0)是光轴中心点的图像坐标即主点坐标,(x c 1, y c 1)是焦距归一化成像平面上的成像点坐标。k s =αc k x ,αc 是摄像机的实际y 轴与理想y 轴之间的夹角,单位为弧度。 ?????++++++=++++++=1 142123654221112124113654221112)2()1()2(2)1(c c c c c c c c c d c c c c c c c c c c d c y x k y r k r k r k r k y y x r k y x k r k r k r k x x (1-2) 式中:(x c 1d , y c 1d )是焦距归一化成像平面上的成像点畸变后的坐标,k c 1是2阶径向畸变系数,k c 2是4阶径向畸变系数,k c 5是6阶径向畸变系数,k c 3、k c 4是切向畸变系数,r 为成像点到摄像机坐标系原点的距离,r 2= x c 12 + y c 12。 1.1.2 操作界面 将Matlab 的当前目录设定为含有标定工具箱的目录,即toolbox_calib 目录。在Matlab 命令窗口运行calib_gui 指令,弹出图1所示选择窗口。 图1 内存使用方式窗口 图1窗口中,具有两个选项,分别是“Standard ”和“Memory efficient ”。如果点击选择“Standard ”,则将目录中的所有图像读入内存中,所需内存较大。如果点击选择“Memory efficient ”,则将目录中的图像按照需要每次一幅图像读入内存中,所需内存较小。在选择了
matlab中SVM工具箱的使用方法
包已经解压到文件夹F:\R2009b\toolbox\svm matlab中SVM工具箱的使用方法 1,下载SVM工具箱:https://www.360docs.net/doc/4e940711.html,/faculty/chzheng/bishe/indexfiles/indexl.htm 2,安装到matlab文件夹中 1)将下载的SVM工具箱的文件夹放在\matlab71\toolbox\下 2)打开matlab->File->Set Path中添加SVM工具箱的文件夹 现在,就成功的添加成功了. 可以测试一下:在matlab中输入which svcoutput 回车,如果可以正确显示路径,就证明添加成功了,例如: C:\Program Files\MATLAB71\toolbox\svm\svcoutput.m 3,用SVM做分类的使用方法 1)在matlab中输入必要的参数:X,Y,ker,C,p1,p2 我做的测试中取的数据为: N = 50; n=2*N; randn('state',6); x1 = randn(2,N) y1 = ones(1,N); x2 = 5+randn(2,N); y2 = -ones(1,N); figure; plot(x1(1,:),x1(2,:),'bx',x2(1,:),x2(2,:),'k.'); axis([-3 8 -3 8]); title('C-SVC') hold on; X1 = [x1,x2]; Y1 = [y1,y2]; X=X1'; Y=Y1'; 其中,X是100*2的矩阵,Y是100*1的矩阵 C=Inf;
ker='linear'; global p1 p2 p1=3; p2=1; 然后,在matlab中输入:[nsv alpha bias] = svc(X,Y,ker,C),回车之后,会显示: Support Vector Classification _____________________________ Constructing ... Optimising ... Execution time: 1.9 seconds Status : OPTIMAL_SOLUTION |w0|^2 : 0.418414 Margin : 3.091912 Sum alpha : 0.418414 Support Vectors : 3 (3.0%) nsv = 3 alpha = 0.0000 0.0000 0.0000 0.0000 0.0000 2)输入预测函数,可以得到与预想的分类结果进行比较. 输入:predictedY = svcoutput(X,Y,X,ker,alpha,bias),回车后得到: predictedY = 1 1 1 1 1 1 1
1-长度测量基本仪器的使用
第三章 普通物理实验 实验1 长度测量基本仪器的使用 【实验目的】 1.熟悉游标卡尺、螺旋测微计、测量显微镜的构造、测量原理及使用方法; 2.学习有效数字和不确定度的计算,掌握误差理论与数据处理方法. 【实验仪器】 游标卡尺,螺旋测微计,测量显微镜,球体,圆柱等. 【仪器介绍】 1.游标原理 普通米尺最小刻度是1mm ,因此使用米尺只能准确地测量到1mm ,为更准确地测量长度,人们采用了游标装置. 游标尺有主尺(米尺)和副尺(标有N 个刻度的游标)两部分构成.由于主尺上标出的相应长度与副尺上标出的相应刻度均相差一个小量x ?,1/(mm )x N ?=,(常见的有三种,1/10(mm )x ?=,1/20(mm)x ?=,1/50(mm )x ?=.当副尺上标有N 个刻度时,游标上这N 个刻度恰好能等分主尺上的1mm ,使读数可精确到1/(mm )N .可见,游标原理可用四个字来概括—— 例如:1/10(m m )游标(也叫十分游标).游标上每个刻度与主尺相应刻度均差 1/10(mm )x ?=,当测量某物体长度时,先将被测物体一端和主尺的零刻线对齐,而另 一端落在主尺的第k 和k+1个刻度之间(k =6,k +1=7),则物体长度L k L =+?,L ?为物体另一端距离第k 个刻度的距离.由于游标刻度与主尺刻度存在差值x ?,两排刻度经对比,必然可找到游标上某个刻度(设为第n 个)与主尺上某刻度重合或最为接近,如图1-2中n =5处与主尺最为接近,即 图1-2 游标卡尺读数举例 图1-1 游标卡尺差示法
150.510 L ?= ?= 而 60.5 6.5()L k L mm =+?=+= 一般而言,当游标上第n 个刻度与主尺上某一刻度重合时,主尺第k 个刻度与游标零刻线间距离为L n x ?=?,待测物体长度由两部分读数构成:①游标零刻线指示部分,即主尺上第k 个刻度所标示的长度,这部分可从主尺上读出,②游标刻线与主尺刻线重合部分所标示的长度,即L n x ?=?,这部分可从游标上读出(目前使用的游标上的刻度不是n 的值,而是n 与x ?相乘后的结果).即 L k L =+? 1/20(mm )的游标也叫“二十分游标”,游标上有20个刻度,如图1-3(a )所示, 游标上每个刻度与主尺的1mm 刻度相差1/20(mm ).游标上的刻度值0,25,50,75,0就是L ?的数值. 1/50(mm )的游标如图1-3(b )所示,其具体含义仿前述讨论,可以自行总结. 2.游标卡尺 游标卡尺的构造如图1-4所示,卡钳E 和E '同刻有毫米的主尺A 相连,游标框W 上附有游标B 以及卡钳F 和F ',推动游标框W 可使游标B 连同卡钳F 、F '沿主尺滑 (a ) 图1-3 二十分、五十分游标 (b )