弯曲法测杨氏模量及霍尔位置传感器的定标
位移传感器(中英对照)
位移传感器又称为线性传感器,它分为电感式位移传感器,电容式位移传感器,光电式位移传感器,位移传感器超声波式位移传感器,霍尔式位移传感器。电感式位移传感器是一种属于金属感应的线性器件,接通电源后,在开关的感应面将产生一个交变磁场,当金属物体接近此感应面时,金属中则产生涡流而吸取了振荡器的能量,使振荡器输出幅度线性衰减,然后根据衰减量的变化来完成无接触检测物体的目的。 简介 电感式位移传感器具有无滑动触点,工作时不受灰尘等非金属因素的影响,并且低功耗,长寿命,可使用在各种恶劣条件下。位移传感器主要应用在自动化装备生产线对模拟量的智能控制。 位移是和物体的位置在运动过程中的移动有关的量,位移的测量方式所涉及的范围是相当广泛的。小位移通常用应变式、电感式、差动变压器式、涡流式、霍尔传感器来检测,大的位移常用感应同步器、光栅、容栅、磁栅等传感技术来测量。其中光栅传感器因具有易实现数字化、精度高(目前分辨率最高的可达到纳米级)、抗干扰能力强、没有人为读数误差、安装方便、使用可靠等优点,在机床加工、检测仪表等行业中得到日益广泛的应用。 原理 计量光栅是利用光栅的莫尔条纹现象来测量位移的。“莫尔”原出于法文Moire,意思是水波纹。几百年前法国丝绸工人发现,当两层薄丝绸叠在一起时,将产生水波纹状花样;如果薄绸子相对运动,则花样也跟着移动,这种奇怪的花纹就是莫尔条纹。一般来说,只要是有一定周期的曲线簇重叠起来,便会产生莫尔条纹。计量光栅在实际应用上有透射光栅和反射光栅两种;按其作用原理又可分为辐射光栅和相位光栅;按其用途可分为直线光栅和圆光栅。下面以透射光栅为例加以讨论。透射光栅尺上均匀地刻有平行的刻线即栅线,a为刻线宽,b为两刻线之间缝宽,W=a+b称为光栅栅距。目前国内常用的光栅每毫米刻成10、25、50、100、250条等线条。光栅的横向莫尔条纹测位移,需要两块光栅。一块光栅称为主光栅,它的大小与测量范围相一致;另一块是很小的一块,称为指示光栅。为了测量位移,必须在主光栅侧加光源,在指示光栅侧加光电接收元件。当主光栅和指示光栅相对移动时,由于光栅的遮光作用而使莫尔条纹移动,固定在指示光栅侧的光电元件,将光强变化转换成电信号。由于光源的大小有限及光栅的衍射作用,使得信号为脉动信号。 信号处理 辨向原理 在实际应用中,位移具有两个方向,即选定一个方向后,位移有正负之
基于霍尔传感器的转速测量)
成绩评定: 传感器技术 课程设计 题目基于霍尔传感器的转速测量
摘要 转速是发动机重要的工作参数之一,也是其它参数计算的重要依据。针对工业上常见的发动机设计了以单片机STC89C51为控制核心的转速测量系统。系统利用霍尔传感器作为转速检测元件,并利用设计的调理电路对霍尔转速传感器输出的信号进行滤波和整形,将得到的标准方波信号送给单片机进行处理。实际测试表明,该系统能满足发动机转速测量要求。 关键词:转速测量,霍尔传感器,信号处理,数据处理
目录 一、设计目的------------------------- 1 二、设计任务与要求--------------------- 1 2.1设计任务------------------------- 1 2.2设计要求------------------------- 1 三、设计步骤及原理分析 ----------------- 1 3.1设计方法------------------------- 2 3.2设计步骤------------------------- 2 3.3设计原理分析--------------------- 16 四、课程设计小结与体会 ---------------- 16 五、参考文献------------------------- 16
一、设计目的 1.学习基本理论在实践中综合运用的初步禁言,掌握模拟电路的设计的基本方法,设计步骤,培养综合设计与实物调试能力。 2.学会霍尔传感器的设计方法和性能指标测试。 3.进一步了解霍尔传感器的组成框图和各个单元的工作原理以及相互之间的联系。 4.培养实践技能,提高分析和解决问题的能力。 5.提高自己对文献资料的搜索和信息处理能力。 二、设计任务与要求 2.1设计任务 1、查阅传感器有关方面的相关资料,了解此方面的发展状况。 2、掌握所用器件的特性。 3、采用合理的设计方案。 4、设计、实现该系统。 5、撰写设计报告。 2.2设计要求 1.掌握霍尔传感器的使用方法 2.熟悉使用单片机测量转速 三、设计步骤及原理分析 3.1设计方法 系统由传感器、信号预处理电路、处理器、显示器和系统软件等部分组成。传感器部分采用霍尔传感器,负责将电机的转速转化
实验十九 开关式霍尔传感器测转速实验
实验十九开关式霍尔传感器测转速实验 一、实验目的:了解开关式霍尔传感器测转速的应用。 二、基本原理:开关式霍尔传感器是线性霍尔元件的输出信号经放大器放大,再经施密特电路整形成矩形波(开关信号)输出的传感器。开关式霍尔传感器测转速的原理框图19—1所示。当被测圆盘上装上6只磁性体时,圆盘每转一周磁场就变化6次,开关式霍尔传感器就同频率f相应变化输出,再经转速表显示转速n。 图19—1开关式霍尔传感器测转速原理框图 三、需用器件与单元:主机箱中的转速调节0~24V直流稳压电源、+5V直流稳压电源、电压表、频率\转速表;霍尔转速传感器、转动源。 四、实验步骤: 1、根据图19—2将霍尔转速传感器安装于霍尔架上,传感器的端面对准转盘上的磁钢并调节升降杆使传感器端面与磁钢之间的间隙大约为2~3mm。 2、将主机箱中的转速调节电源0~24V旋钮调到最小(逆时针方向转到底)后接入电压表(电压表量程切换开关打到20V档);其它接线按图19—2所示连接(注意霍尔转速传感器的三根引线的序号);将频频\转速表的开关按到转速档。 3、检查接线无误后合上主机箱电源开关,在小于12V范围内(电压表监测)调节主机箱的转速调节电源(调节电压改变直流电机电枢电压),观察电机转动及转速表的显示情况。
图19—2 霍尔转速传感器实验安装、接线示意图 4、从2V开始记录每增加1V相应电机转速的数据(待电机转速比较稳定后读取数据);画出电机的V-n(电机电枢电压与电机转速的关系)特性曲线。实验完毕,关闭电源。 n(转/ 406286108132157179203225250分) V(mv)2003004635006017037999019991104 电机的V-n(电机电枢电压与电机转速的关系)特性曲线 五、思考题: 利用开关式霍尔传感器测转速时被测对象要满足什么条件? 被测物能够阻挡或透过或反射霍尔信号,般都是一个发射头一个接收头若发射接收安装在同侧,则被测物必须能反射该信号,发射接收安装在对侧,则被测物必须能阻挡透过该信
实验 杨氏模量的测定(梁弯 曲法)
实验杨氏模量的测定(梁弯曲法) 【实验目的】 用梁的弯曲法测定金属的杨氏模量。 【仪器用具】 攸英装置,光杠杆,望远镜及直尺,螺旋测微计,游标卡尺,米尺,千分表。 【实验原理】 将厚为、宽为的金属棒放在相距为的二刀刃上(图1),在棒上二刀刃的中点处挂上质量为的砝码,棒被压弯,设挂砝码处下降,称此为弛垂度,这时棒材的杨氏模量
. (1) 下面推导上式。图(2)为沿棒方向的纵断面的一部分。在相距的二点上的横断面,在棒弯曲前互相平行,弯曲后则成一小角度。显然在棒弯曲后,棒的下半部呈现拉伸状态,上半部为压缩状态,而在棒的中间有一薄层虽然弯曲但长度不变,称为中间层。 计算与中间层相距为、厚、形变前长为的一段,弯曲后伸长了,它受到的拉力为,根据胡克定律有 . 式中表示形变层的横截面积,即。于是 . 此力对中间层的转矩为,即 . 而整个横断面的转矩应是 . (2) 如果将棒的中点固定,在中点两侧各为处分别施以向上的力(图3),则棒的弯曲情况当和图1所示的完全相同。棒上距中点为、长为的一段,由于弯曲产生的下降等于
(3) 当棒平衡时,由外力对该处产生的力距应当等于由式(2)求出的转距,即 . 由此式求出代入式(3)中并积分,可求出弛垂度 , (4) 即 . (1) 【仪器介绍】 攸英装置如图4所示,在二支架上设置互相平的钢制刀刃,其上放置待测棒和辅助棒。在待测棒上二刀刃间的中点处,挂上有刀刃的挂钩和砝码托盘,往托盘上加砝码时待测棒将被压弯,通过在待测棒和辅助棒上放置的千分表测量出棒弯曲的情况,从而求出棒材的杨氏模量。
【实验内容与要求】 1.按图4安置好仪器,用千分表直接测出。 2.用螺旋测微计在棒的各处测厚度,要测10次取平均值。 3.用游标卡尺在棒的各处测宽度(测4次)。 4.用米尺测二刀刃间的距离,测4次。 5.将测得的量代入(1)求出棒材的杨氏模量。单位用。 6.求测量结果的误差。 【注意事项】 【思考问题】 1.调节仪器的程序分几步,每一步要达到什么要求? 2.测量时哪些量要特别仔细测?为什么? 3.什么是弛垂度?怎样测量它? 4.如果被测物是半径为的圆棒,式(1)将是什么样子的? 5.如果用读数显微镜或螺旋测微计去测弛垂度,应当怎样进行测量?
动态法测量杨氏弹性模量
动态法测量杨氏弹性模量 郑新飞 杨氏模量是固体材料在弹性形变范围内正应力与相应正应变(当一条长度为L、截面积为S的金属丝在力F作用下伸长ΔL时,F/S叫应力,其物理意义是金属丝单位截面积所受到的力;ΔL/L叫应变,其物理意义是金属丝单位长度所对应的伸长量)的比值,其数值的大小与材料的结构、化学成分和加工制造方法等因素有关。杨氏模量的测量是物理学基本测量之一,属于力学的范围。根据不同的测量对象,测量杨式模量有很多种方法,可分为静态法、动态法、波传播法三类。 一、实验目的 1、理解动态法测量杨氏模量的基本原理。 2、掌握动态法测量杨氏模量的基本方法,学会用动态法测量杨氏模量。 3、了解压电陶瓷换能器的功能,熟悉信号源和示波器的使用。 4、培养综合运用知识和使用常用实验仪器的能力。 二、实验仪器 1、传感器I(激振):把电信号转变成机械振动。 2、试样棒:由悬线把机械振动传给试样,使试样受迫做共振动。 3、传感器II(拾振):机械振动又转变成电信号。 4、示波器:观察传感器II转化的电信号大小。
三、实验原理 理论上可以得出用动态悬挂法测定金属材料的杨氏模量,为 2436067.1f d m l E = (1) 式中l 为棒长,d 为棒的直径,m 为棒的质量。如果在实验中测定了试样(棒)在不同温度时的固有频率f ,即可计算出试样在不同温度时的杨氏模量E 。 四、实验内容 1、测定试样的长度l 、直径d 和质量m 。每个物理量各测六次,列表记录。 2、在室温下不锈钢和铜的杨氏模量分别为211102m N ?和 211102.1m N ?,先由公式(1)估算出共振频率f ,以便寻找共振点。 3、把试样棒用细钢丝挂在测试台上,试样棒的位置约距离端面l 224.0和l 776.0处,悬挂时尽量避开这两个位置。 4、把2-YM 型信号发生器的输出与2-YM 型测试台的输入相连, 测试
直流激励时接触式霍尔位移传感器特性实验
实验三直流激励时接触式霍尔位移传感器特性实验一、实验目的 了解霍尔位移传感器原理与应用。 二、基本原理 根据霍尔效应,霍尔电势U H=K H IB,保持K H、I不变,若霍尔元件在梯度磁场B中运动,且B是线性均匀变化的,则霍尔电势U H也将线性均匀变化,这样就可以进行位移测量。 三、需用器件与单元 霍尔传感器实验模板、线性霍尔位移传感器、直流电源±4V、电源±15V、测微头、数显单元。 四、实验步骤 1、将霍尔传感器按图8-1 安装。霍尔传感器与实验模板的连接按图8-2进行。①、 ③为电源±4V(或单元5V),②、④为输出,R1与④之间可暂时不接。 图8-1 霍尔传感器安装示意图 2、开启电源,接入±15V电源,将微测头旋至10mm处,左右移动微测头使霍尔片处在磁钢中间位置,即数显表电压指示最小,拧紧测量架顶部的固定螺钉,接入R1与④之间的连线,调节Rw2使数显表指示为零(数显表置2V档)。
图8-2 霍尔传感器与实验模板连线图 3、旋转微测头,每转动0.5mm记下数字电压表读数,并将读数填入表8-1中,将测 微头回到10mm处,反向旋转测微头,重复实验过程,填入表8-1中。 五、实验结果分析与处理 1、记录数显表数值如下: 表3-1:霍尔传感器位移量与输出电压的关系: X(mm)7.07.58.079.09.510.010.511.011.512.012.513.0 V(mV)1721361067953270-28-59-92-124-151-165 2、由数据绘出霍尔传感器位移量与输出电压特性曲线如下
图8-3 霍尔传感器位移量与输出电压特性曲线 3、(1)计算系统灵敏度: 在)10,0.7[∈X 区间, ΔV=(172-136)+(136-106)+???+(27-0)/6=172/6=28.67mV ΔX=0.5mm 灵敏度S=ΔV/ΔX=57.34mV/mm 在]0.13,0.10(∈X 区间, ΔV=(28-0)+(59-28)+。。。+(165-151)/6=/6=27.5mV ΔX=0.5mm 灵敏度S=ΔV/ΔX=55.0mV/mm (2)计算非线性误差: 在)10,0.7[∈X 区间,
传感器测速实验报告(第一组)
传感器测速实验报告 院系: 班级: 、 小组: 组员: 日期:2013年4月20日
实验二十霍尔转速传感器测速实验 一、实验目的 了解霍尔转速传感器的应用。 二、基本原理 利用霍尔效应表达式:U H=K H IB,当被测圆盘上装有N只磁性体时,圆盘每转一周磁场就变化N次。每转一周霍尔电势就同频率相应变化,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。 本实验采用3144E开关型霍尔传感器,当转盘上的磁钢转到传感器正下方时,传感器输出低电平,反之输出高电平 三、需用器件与单元 霍尔转速传感器、直流电源+5V,转动源2~24V、转动源电源、转速测量部分。 四、实验步骤 1、根据下图所示,将霍尔转速传感器装于转动源的传感器调节支架上,调节探头对准转盘内的磁钢。 图9-1 霍尔转速传感器安装示意图 2、将+15V直流电源加于霍尔转速器的电源输入端,红(+)、黑( ),不能接错。 3、将霍尔传感器的输出端插入数显单元F,用来测它的转速。 4、将转速调解中的转速电源引到转动源的电源插孔。 5、将数显表上的转速/频率表波段开关拨到转速档,此时数显表指示电机的转速。 6、调节电压使转速变化,观察数显表转速显示的变化,并记录此刻的转速值。
五、实验结果分析与处理 1、记录频率计输出频率数值如下表所示: 电压(V) 4 5 8 10 15 20 转速(转/分)0 544 930 1245 1810 2264 由以上数据可得:电压的值越大,电机的转速就越快。 六、思考题 1、利用霍尔元件测转速,在测量上是否有所限制? 答:有,测量速度不能过慢,因为磁感应强度发生变化的周期过长,大于读取脉冲信号的电路的工作周期,就会导致计数错误。 2、本实验装置上用了十二只磁钢,能否只用一只磁钢? 答:如果霍尔是单极的,可以只用一只磁钢,但可靠性和精度会差一些;如果霍尔 是双极的,那么必须要有一组分别为n/s极的磁钢去开启关断它,那么至少要两只磁钢。
霍尔传感器测量转速
测试技术应用案例 (霍尔传感器测量转速) 班级: 学号: 姓名:
霍尔传感器测量转速 一.霍尔传感器的优点 1.测量范围广:霍尔传感器可以测量任意波形的电流和电压, 如:直流、交流、脉冲波形等。 2.精度高:在工作温度区内精度优于1%,该精度适合于任何波形 的测量。 3.线性度好:优于%。 4.动态性能好:响应时间小于1μs跟踪速度di/dt高于50A/μs。 5.性价比高。 各式各样的霍尔传感器 二.霍尔传感器测转速原理 霍尔效应,是指磁场作用于载流金属导体、半导体中的载流子时,产生横向电位差的物理现象。当电流通过金属箔片时,若在垂直于电流的方向施加磁场,则金属箔片两侧面会出现横向电位差。利用霍尔效应可以设计制成多种传感器。霍尔电位差U H的基本关系为: U H=K H IB K H =1/nq(金属) 式中K H――霍尔系数;n――单位体积内载流子或自由电子的个数;q――电子电量;I――通过的电流;B――垂直于I的磁感应强度; 利用霍尔效应表达式:U H=K H IB,当被测物体上装上N只磁性体时,物体每转一周磁场就变化N次,霍尔电势相应变化N次,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。 三.测量设备 本案例以实验室霍尔元件测量圆盘转速为例。 实验设备:CSY2000系列传感器与检测技术实验台。
1、主控台部分,提供高稳定的±15V、+5V、±2V~±10V可 调、+2V~+24V可调四种直流稳压电源;主控台面板上还装有电压、频率、转速的3位半数显表。 2、旋转源0-2400转/分(可调) 需用器件与单元:霍尔传感器、5V直流源、转速调节装置、转动源单元、数显单元的转速显示部分。 四.实验方案 1.实验装置如下图 2.将5V直流源加于霍尔元件电源输入端。 3.将霍尔转速传感器输出端(黄)插入数显单元F i n端。 4.将转速调节中的2V-24V转速电源引入到台面上转动单元中转 动电源2-24VK插孔。 5.将数显单元上的转速/频率表波段开关拨到转速档,此时数显 表指示转速。 6.调节转速调节电压使转动速度变化。观察数显表转速显示的变 化。 五.实验结果计算 磁体经过霍尔元件,霍尔元件就会发出就会发出一个信号,经放大整形得到脉冲信号,两个脉冲的间隔时间即为周期,通过周期就可算出转速。
实验6霍尔传感器的测杨氏模量
实验6 霍尔传感器测杨氏模量 杨氏模量是描述固体材料抵抗形变能力的重要物理量,在工程上作为选择材料的依据之一,是工程技术中常用的参数。 利用霍尔位置传感器测量微小位移,可以改进传统粱弯曲法实验中的测量方法,使古老的实验又增添新的技术内容。而霍尔元件及集成霍尔传感器具有尺寸小、外围电路简单、频响宽、使用寿命长,特别是抗干扰能力强等特点,近年来被广泛应用于物理量的测量、自动控制及信息处理等领域。 【实验目的】 1.了解霍尔位置传感器的结构原理、特性及使用方法。 2.学习掌握粱弯曲法测量金属板的杨氏弹性模量。 3.学会确定灵敏度的方法,并确定仪器的灵敏度。 4.掌握逐差法处理数据。 【实验仪器】 霍尔位置传感器、霍尔位置传感器输出信号测量仪、游标卡尺、螺旋测微器。 【实验原理】 霍尔传感器置于磁感应强度为B 的磁场中,在垂直于磁场的方向通入电流I ,则会产生霍尔效应,即在与这二者相互垂直的方向上将产生霍尔电势: IB K U H H = (5.2.1) 其中H K 为霍尔传感器的灵敏度,单位为T mA mV ?。 如果保持通入霍尔元件的电流I 不变,而使其在一均匀梯度的磁场中移动,则输出的霍尔电势的变化量为: z dz dB I K U H H ?=? (5.2.2) 其中:z ?为位移量; dz dB 为磁感应强度B 沿位移方向的梯度,为常数。
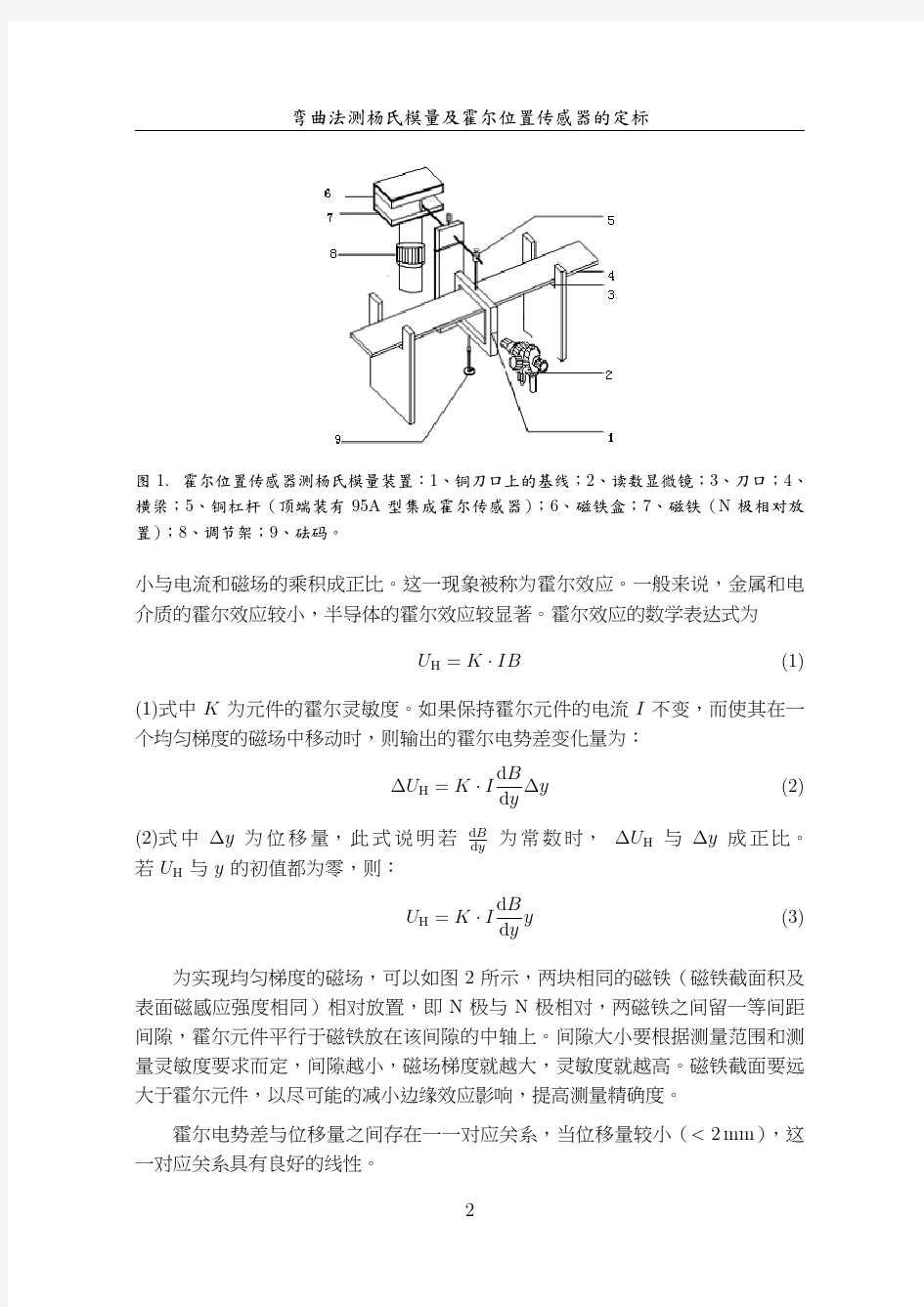
为了实现上述均匀梯度磁场,选用两块相同的磁铁。磁铁平行相对而放,即N 极相对放置。两磁铁之间的空隙内放入霍尔元件,并使此元件平行于磁铁,且与两磁铁的间距相等,即霍尔元件放置两磁铁空隙的中心,如图6.1所示。 若间隙中心截面的中心点A 的磁感应强度为零,霍尔元件处于该处时输出的霍尔电势应为零。当霍尔元件偏离中心沿Z 轴发生位移,由于磁感应强度不再为零,霍尔元件也就有相应电势输出,其大小可由数字电压表读出。一般地,将霍尔电势为零时元件所处的位置作为位移参考点。 霍尔电势与位移量之间存在一一对应的关系,当位移量较小时(小于2mm ),对应关系具有良好的线性,如图6.2所示。 在粱弯曲的情况下,杨氏模量E 用下列公式计算: z b a mg d E ?=334 (6.1) 式中:d 为两刀口间的距离,a 为粱的厚度,b 为粱的宽度,m 为砝码的质量,g 为重力加速度(2 792.9s m g =),z ?为粱中心由于外力的作用而下降的距离。 mm 图6.1 图 6.2
动态法测杨氏模量实验报告
动态法测量杨氏模量 一、 实验目的 1. 理解动态法测量杨氏模量的基本原理。 2. 掌握动态法测量杨氏模量的基本方法,学会用动态法测量杨氏模量。 3. 了解压电陶瓷换能器的功能,熟悉信号源和示波器的使用。学会用示波器观察判断样品共振的方法。 4. 培养综合运用知识和使用常用实验仪器的能力。 二、 实验原理: 在一定条件下,试样振动的固有频率取决于它的几何形状、尺寸、质量以及它的杨氏模量。如果在实验中测出试样在不同温度下的固有频率,就可以计算出试样在不同温度下的杨氏模量。 根据杆的横振动方程式 02 244=??+??t y EJ S x y ρ (1) 式中ρ为杆的密度,S 为杆的截面积,?= s dS y J 2 称为惯量矩(取决于截面的形状),E 即为杨氏模量。 如图1所示,长度L 远远大于直径d (L >>d )的一细长棒,作微小横振动(弯曲振动)时满足的动力学方程(横振动方程)为 02244=??+??t EJ y S x y ρ (1) 棒的轴线沿x 方向,式中y 为棒上距左端x 处截面的y 方向位 移,E 为杨氏模量,单位为Pa 或N/m 2;ρ为材料密度;S 为 截面积;J 为某一截面的转动惯量,??=s ds y J 2。 横振动方程的边界条件为:棒的两端(x =0、L )是自由端,端点既不受正应力也不受切向力。用分离变量法求解方程(1),令)()(),(t T x X t x y =,则有 2 24411dt T d T EJ S dx X d X ?-=ρ (2) 由于等式两边分别是两个变量x 和t 的函数,所以只有当等式两边都等于同一个常数时等式才成立。假设此常数为K 4,则可得到下列两个方程 044 4=-X K dx X d (3) 0422=+T S EJ K dt T d ρ (4) 如果棒中每点都作简谐振动,则上述两方程的通解分别为 图1 细长棒的弯曲振动
实验 杨氏模量的测定(梁弯曲法)
实验 杨氏模量的测定(梁弯曲法) 【实验目的】 用梁的弯曲法测定金属的杨氏模量。 【仪器用具】 攸英装置,光杠杆,望远镜及直尺,螺旋测微计,游标卡尺,米尺,千分表。 【实验原理】 将厚为a 、宽为b 的金属棒放在相距为l 的二刀刃上(图1),在棒上二刀刃的中点处挂上质量为m 的砝码,棒被压弯,设挂砝码处下降λ,称此λ为弛垂度,这时棒材的杨氏模量 λ b a mgl E 3 3 4= . (1) 下面推导上式。图(2)为沿棒方向的纵断面的一部分。在相距dx 的21O O 二点上的横断面, 在棒弯曲前互相平行,弯曲后则成一小角度?d 。显然在棒弯曲后,棒的下半部呈现拉伸状态,上半部为压缩状态,而在棒的中间有一薄层虽然弯曲但长度不变,称为中间层。 计算与中间层相距为y 、厚dy 、形变前长为dx 的一段,弯曲后伸长了?yd ,它受到的拉力为dF ,根据胡克定律有 dx yd E dS dF ? =. 式中dS 表示形变层的横截面积,即bdy dS =。于是
y d y d x d Eb dF ?=. 此力对中间层的转矩为dM ,即 dy y dx d Eb dM 2 ?=. 而整个横断面的转矩M 应是 dx d b Ea dy y dx d Eb M a ??3 2 2 12 12= =? . (2) 如果将棒的中点C 固定,在中点两侧各为2 l 处分别施以向上的力 mg 2 1(图3),则棒的弯曲情 况当和图1所示的完全相同。棒上距中点C 为x 、长为dx 的一段,由于弯曲产生的下降λd 等于 ?λd x l d )2 ( -= (3) 当棒平衡时,由外力mg 2 1对该处产生的力距 )2 ( 21x l mg -应当等于由式(2)求出的转距M , 即 dx d b Ea x l mg ?3 12 1)2 ( 2 1= -. 由此式求出?d 代入式(3)中并积分,可求出弛垂度 b Ea mgl dx x l b Ea mg 3 3210 2 3 4)2 ( 6= -=?λ, (4) 即 λ b a m g l E 3 3 4= . (1)
霍尔传感器介绍
霍尔传感元器件及A44E介绍 1 引言 霍尔器件是一种磁传感器。用它们可以检测磁场及其变化,可在各种与磁场有关的场合中使用。霍尔器件以霍尔效应为其工作基础。霍尔器件具有许多优点,它们的结构牢固,体积小,重量轻,寿命长,安装方便,功耗小,频率高(可达1MHZ),耐震动,不怕灰尘、油污、水汽及盐雾等的污染或腐蚀。霍尔线性器件的精度高、线性度好;霍尔开关器件无触点、无磨损、输出波形清晰、无抖动、无回跳、位置重复精度高(可达μm级)。取用了各种补偿和保护措施的霍尔器件的工作温度范围宽,可达-55℃~150℃。 按照霍尔器件的功能可将它们分为:霍尔线性器件和霍尔开关器件。前者输出模拟量,后者输出数字量。 按被检测的对象的性质可将它们的应用分为:直接应用和间接应用。前者是直接检测出受检测对象本身的磁场或磁特性,后者是检测受检对象上人为设置的磁场,用这个磁场来作被检测的信息的载体,通过它,将许多非电、非磁的物理量例如力、力矩、压力、应力、位置、位移、速度、加速度、角度、角速度、转数、转速以及工作状态发生变化的时间等,转变成电量来进行检测和控制。 2 霍尔效应和霍尔器件 2.1 霍尔效应 如图1所示,在一块通电的半导体薄片上,加上和片子表面垂直的磁场B,在薄片的横向两侧会出现一个电压,如图1中的VH,这种现象就是霍尔效应,是由科学家爱德文·霍尔在1879年发现的。VH称为霍尔电压。 这种现象的产生,是因为通电半导体片中的载流子在磁场产生的洛仑兹力的作用下,分别向片子横向两侧偏转和积聚,因而形成一个电场,称作霍尔电场。霍尔电场产生的电场力和洛仑兹力相反,它阻碍载流子继续堆积,直到霍尔电场力和洛仑兹力相等。这时,片子两侧建立起一个稳定的电压,这就是霍尔电压。 在片子上作四个电极,其中C1、C2间通以工作电流I,C1、C2称为电流电极,C3、C4间取出霍尔电压VH,C3、C4称为敏感电极。将各个电极焊上引线,并将片子用塑料封装起来,就形成了一个完整的霍尔元件(又称霍尔片)。 (1)(2)(3) 在上述(1)、(2)、(3)式中VH是霍尔电压,ρ是用来制作霍尔元件的材料的电阻率,μn是材料的电子迁移率,RH是霍尔系数,l、W、t分别是霍尔元件的长、宽和厚度,f(I/W)是几何修正因子,是由元件的几何形状和尺寸决定的,
霍尔测速实验
246810 1214 1618202224 霍尔传感器V-n 曲线图 电压(V )/V 转速(n )/r p m 霍尔测速实验报告 一、实验目的: 了解霍尔组件的应用——测量转速。 二、实验仪器: 霍尔传感器、+5V 、+4、±6、±8、±10V 直流电源、转动源、频率/转速表。 三、实验原理; 利用霍尔效应表达式:U H =K H IB ,当被测圆盘上装上N 只磁性体时,转盘每转一周磁场变化N 次,每转一周霍尔电势就同频率相应变化,输出电势通过放大、整形和计数电路就可以测出被测旋转物的转速。 四、实验内容与步骤 1.安装根据图28-1,霍尔传感器已安装于传感器支架上,且霍尔组件正对着转盘上的磁钢。 图28-1 2.将+5V 电源接到三源板上“霍尔”输出的电源端,“霍尔”输出接到频率/转速表(切换到测转速位置)。 3.打开实验台电源,选择不同电源+4V 、+6V 、+8V 、+10V 、12V (±6)、16V (±8)、20V (±10)、24V 驱动转动源,可以观察到转动源转速的变化,待转速稳定后记录相应驱动电压下得到的转速值。也可用示波器观测霍尔元件输出的脉冲波形。 五、数据记录与分析 2、用matlab 绘制V-RPM 曲线图
3、霍尔组件产生脉冲的原因 因为霍尔传感器本身是磁场和霍尔元件之间由于磁性交替变化而产生的脉冲信号变化。两者之间通常会设有遮光原件,能够在变化过程中间断的影响到两者之间的磁通量。有磁场照射霍尔元件导通,没有磁场照射霍尔元件截止,不断的交替变化引起了脉冲的信号变化,所以霍尔测速时,所长生的波形也就是脉冲电,只是随转速的改变频率发生了改变,频率变化越快证明转速越快。 六、实验报告 1.分析霍尔组件产生脉冲的原理。 2.根据记录的驱动电压和转速,作V-RPM曲线。
弹性模量测量方法
弹性模量测量方法 点击次数:3972 发布时间:2010-10-22 ? 弹性模量测量方法?最简单的形变是线状或棒状物体受到长度方向上的拉力 作用,发生长度伸长。设金属丝(或杆)的原长为L,横截面积为S,在弹性限度内的拉力F作用下,伸长了L。比值F/S为金属丝单位横截面积上所受的力,叫做胁强(或应力),相对伸长量L/L叫胁变(或应变)。据虎克定律,胁强和胁变成正比,即: (1) 比例系数: (2) E叫做物体的弹性模量(或称杨氏模量)。E的大小与物体的粗细、长短等形状无关,只决定于材料的性质,它是表示各种固体材料抗拒形变能力的重要物理量,是各种机械设计和工程技术选择构件用材必须考虑的重要力学参量。 任何固体在外力作用下都会改变固体原来的形状大小,这种现象叫做形变。一定限度以内的外力撤除之后,物体能完全恢复原状的形变,叫弹性形变。 杨氏弹性模量的测量方法有静态测量法、共振法、脉冲传输法等,其中以共振法和脉冲法测量精度较高。杨氏弹性模量的静态测量法就是在物体加载以后,测出物体的应力和应变,根据一定的计算式得到E值,主要有拉伸法、梁弯曲法等。 用力F作用在一立方形物体的上面,并使其下面固定(如图一),物体将发生形变成为斜的平行六面体,这种形变称为切变,出现切变后,距底面不同距离处的绝对形变不同(AA'>BB'),而相对形变则相等,即 ?弹性模量测量方法(6-3) 式中称为切变角,当值较小时,可用代替,实验表明,一定限度内切变角与切应力成正比,此处S为立方体平行于底的截面积,现以符号表示切应力,则 (6-4) 比例系数G称切变模量。 测量切变模量的方法有静态扭转法、摆动法。 实验目的
动态法测量杨氏模量教案资料
实验四 动态法测定材料杨氏模量 杨氏模量是工程材料的一个重要物理参数,它标志着材料抵抗弹性形变的能力。 杨氏模量测量方法有多种,最常用的有拉伸法测量金属材料的杨氏模量,这属于静态法测量,这种方法一般仅适用于测量形变较大、延展性较好的材料,对如玻璃及陶瓷之类的脆性材料就无法用此方法测量。动态法由于其在测量上的优越性,在实际应用中已经被广泛采用,也是国家标准指定的一种杨氏模量的测量方法。本实验用悬挂、支撑二种“动态法”测出试样振动时的固有基频,并根据试样的几何参数测得材料的杨氏模量。 一、实验目的 1.理解动态法测量杨氏模量的基本原理。 2.掌握动态法测量杨氏模量的基本方法,学会用动态法测量杨氏模量。 3.培养综合运用知识和使用常用实验仪器的能力。 4.进一步了解信号发生器和示波器的使用方法。 二、实验原理 长度L 远远大于直径d (L>>d )的一细长棒,作微小横振动(弯曲振动)时满足的动 解以上方程的具体过程如下(不要求掌握): 用分离变量法:令)()(),(t T x X t x y = 代入方程(1)得: 2 244d d 1d d 1t T T YJ s x X X ρ-= 等式两边分别是x 和t 的函数,这只有都等于一个常数才有可能,设该常数为4 K ,于是得:
0d d 444=-X K x X 0d d 422=+T s YJ K t T ρ 这两个线形常微分方程的通解分别为: Kx B Kx B shKx B chKx B x X sin cos )(4321+++= ) cos()(?ω+=t A t T 于是解振动方程式得通解为: ) cos()sin cos (),(4321?ω++++=t A Kx B Kx B shKx B chKx B t x y 其中式(2)称为频率公式: 2 14??????=s YJ K ρω (2) 该公式对任意形状的截面,不同边界条件的试样都是成立的。我们只要用特定的边界条件定出常数K ,并将其代入特定截面的转动惯量J ,就可以得到具体条件下的计算公式了。 如果悬线悬挂(支撑点)在试样的节点附近,则其边界条件为自由端横向作用力: 033=??-=??-=x y YJ x M F 弯矩 : 02 2=??=x y YJ M 即 0x d X d 0x 3 3== 0x d X d l x 33== 0x d X d 0x 2 2== 0x d X d l x 22== 将通解代入边界条件,得到1cos =KLchKL ,用数值解法求得本征值K 和棒长L 应满足:ΛΛ420.20 ,279.17 ,137.14 ,9956.10 ,8532.7 ,7300.4 ,0=KL , 由于其中第一个根“0”对应于静态情况,故将其舍去。将第二个根作为第一个根,记作L K 1。一般将7300.4 1=L K 所对应的共振频率称为基频(或称作固有频率)。在上述L K n 值中,1,3,5…个数值对应着“对称形振动”, 第2、4、6…个数值对应着“反对称形振动”。图1给出了当4 ,3 ,2 ,1n =时的振动波形。由1n =图可以看出,试样在作基频振动时,存在两个节点,它们的位置距离端面分别为L 224.0和L 776.0处。理论上悬
霍尔转速测量实训报告
河南工程学院 课程设计 霍尔转速测量 学生姓名:## 学院:电气信息工程学院专业班级:电气工程及其自动化####专业课程:自动检测技术 指导教师:## 2014年6月26日
一、设计的背景和目的 1.设计的背景 在工程实践中,我们经常会遇到各种需要测量转速的场合。例如在发动机、电动机等旋转设备的试验、运转和控制中,常需要分时和连续测量和显示其转速及瞬时速度。 传统式的转速测量通常是采用测速发电机为检测元件,这种方法是模拟式的,因此其得到的信号是电压信号,其抗干扰能力差,灵活性差。霍尔元件是一种基于霍尔效应的磁传感器,已发展成一个品种多样的磁传感器产品族,并已得到广泛的应用。霍尔器件是一种磁传感器。用它们可以检测磁场及其变化,可在各种与磁场有关的场合中使用。霍尔器件以霍尔效应为其工作基础。霍尔器件具有许多优点,它们的结构牢固,体积小,重量轻,寿命长,安装方便,功耗小,频率高(可达1MHZ),耐震动,不怕灰尘、油污、水汽及盐雾等的污染或腐蚀。霍尔线性器件的精度高、线性度好;霍尔开关器件无触点、无磨损、输出波形清晰、无抖动、无回跳、位置重复精度高(可达μm级)。采用了各种补偿和保护措施的霍尔器件的工作温度范围宽,可达.55℃~150℃。按照霍尔器件的功能可将它们分为:霍尔线性器件和霍尔开关器件。前者输出模拟量,后者输出数字量。 2.设计的目的 实验介绍了霍尔传感器的工作原理,阐述了霍尔传感器测速系统的工作过程,利用脉冲计数法实现了对转速的测量,利用硬件电路设计,编制了电机转速的测量设计了测量模块、显示模块等,并通过PROTEUSE软件进行了仿真。仿真结果表明所设计的电路原理上是可行的。 二、设计的功能 根据霍尔传感器的原理,当转动的物体比如说电机在转动时,如果能在其转子上加上一个磁铁,然后让霍尔传感器去感受就能在LED数码管上得到一定时间内的转动的脉冲数,然后通过芯片的内部计算从而得到转速,并且显示在数码管
杨氏弹性模量的测定
实验七杨氏弹性模量的测定 测量材料杨氏模量的方法很多,诸如拉伸法、压入法、弯曲法和碰撞法等。拉伸法是最常用的方法之一。但该方法使用的载荷较大,加载速度慢,且会产生驰豫现象,影响测量结果的精确度。另外,此法还不适用于脆性材料的测量。本实验借助于新颖的动态杨氏模量测量仪用振动法测量材料的杨氏模量。该方法可弥补其不足,同时还可扩大学生在物体机械振动方面的知识面,不失为一种非常有用和很有特点的测量方法。 【实验目的】 1.了解振动法测量材料杨氏模量的原理; 2.学会用作图外推求值法测量振动体基频共振频率和杨氏模量; 3. 测量试件机械振动的本征值 4.观察铝平板的振型; 5.通过实验,逐步提高综合运用各种测量仪器的能力。 【实验仪器】 DY-D99型多用途动态杨氏模量测量仪、YXY-3D型音频信号源、示波器(Y轴灵敏度5-10m V)、毫米刻度钢皮尺(250mm长)、0.02mm精度游标卡尺、物理天平(精度0.05克)。 DY-D99型多功能动态杨氏模量测量仪简介 图3 DY-D99型多功能动态杨氏模量测量仪 1电动式激振器、6电动式拾振器、2试件(圆棒)、17试件(金属铝板)、 3、5刀口、26导轨标尺、9标尺支架、25试件压板、24压板固定螺钉、 10接线箱、11试件选择旋钮、12输入接口、13输出接口、22声整流罩、 19发声元件、18小导轨、20声激振器固定螺钉、14-16水平调节螺钉、 4刻度指示板、8备用试件安放支架、7试件限位装置、23底板 该仪器如图3所示。它由棒材试件杨氏模量定量测量装置和板材试件振型演示观察装置两部分组成。两部分用接线箱连接和转换。前一装置包含两个换能器(电动式换能器)、导轨标尺及其支架。其中一个电动式换能器用作激振器,在音频信号发生器输出的音频正弦信号电压的作用下,作机械振动,进而激励试件作机械振动。另一个电动式换能器当作拾振器,将由试件传递过来的机械振动信号转变为电信号,并输到示波器观察波形。当音频信号发生器的信号频率调到与试件的固有频率相同时,试件产生共振,示波器显示的波形幅度达到最大。两个换能器的作用可互换。它们各自设有一个刀口,可搁置棒材试件。标尺用于指示换能器或刀口在试件上的位置。 矩形金属板试件和带有声整流罩的声激振器是振动体振型演示观察装置的基本组成部
对位移传感器的认识
对位移传感器的认识 桥梁试验是指应用测试手段,对桥梁结构的整体或主要部件进行检测,了解桥梁结构及其部件的工作状态和承载能力,以验证桥梁结构的设计计算理论,检验施工质量和发现运用中存在的问题等。 桥梁试验用的设备可分为机械式测试仪器,电测仪器和光测仪器三大类。桥梁常使用的机械式测试仪器,主要有应变计、位移计和振动仪等三大类。电测仪器一般由传感器、电子测量仪器(主机)和指示记录装置组成。 一,概述 传感器。根据其测试内容的不同,可分为应变传感器、反力传感器、位移传感器、振动传感器等。根据其转换的原理不同,可分为电阻式传感器、电感式传感器、电容式传感器、磁电式传感器、压电式传感器等。其中电阻应变片是在桥梁电测中应用最广泛的一种传感器,它是利用一些金属丝的电阻随其在长度方向的应变,在一定范围内保持线性关系的原理制成的。为了增大电阻的变化量和减少应变片的长度,通常采用高电阻率的电阻丝绕制成栅状,做成应变片。测试时,把它牢固地粘贴在测点上,当测点处的基材发生应变时,电阻应变片随之发生应变,其电阻值也作相应的改变,这就达到了非电量向电量的转换。电阻应变片不但可以测量应变,而且在加上一些附件之后,可以对位移和振动等进行测量。 位移传感器又称为线性传感器,它分为电感式位移传感器,电容式位移传感器,光电式位移传感器,位移传感器超声波式位移传感器,霍尔式位移传感器。电感式位移传感器是一种属于金属感应的线性器件,接通电源后,在开关的感应面将产生一个交变磁场,当金属物体接近此感应面时,金属中则产生涡流而吸取了振荡器的能量,使振荡器输出幅度线性衰减,然后根据衰减量的变化来完成无接触检测物体的目的。 二,各种传感器的特点 电感式位移传感器具有无滑动触点,工作时不受灰尘等非金属因素的影响,并且低功耗,长寿命,可使用在各种恶劣条件下。位移传感器主要应用在自动化装备生产线对模拟量的智能控制。 光电式位移传感器利用激光三角反射法进行测量,对被测物体材质没有任何要求,主要影响为环境光强和被测面是否平整。比如公路测量用到真尚有的激光位移传感器,就对传感器进行了特殊配置,与普通情况不一样。 位移是和物体的位置在运动过程中的移动有关的量,位移的测量方式所涉及的范围是相当广泛的。小位移通常用应变式、电感式、差动变压器式、涡流式、霍尔传感器来检测,大的位移常用感应同步器、光栅、容栅、磁栅等传感技术来测量。其中光栅传感器因具有易实现数字化、精度高(目前分辨率最高的可达到纳米级)、抗干扰能力强、没有人为读数误差、安装方便、使用可靠等优点,在机床加工、检测仪表等行业中得到日益广泛的应用。 三,辨向原理 在实际应用中,位移具有两个方向,即选定一个方向后,位移有正负之分,因此用一个光电元件测定莫尔条纹信号确定不了位移方向。为了辨向,需要有π/2相位差的两个莫尔条纹信号。如图2,在相距1/4条纹间距的位置上安放两个光电元件,得到两个相位差π/2的电信号u01和u02,经过整形后得到两个方
速度测量实验
霍尔测速实验 一、实验目的:了解霍尔转速传感器的应用。 二、基本原理:利用霍尔效应表达式U H = K H IB ,当被测圆盘上装上N 只磁性 体时,圆盘每转一周,磁场就变化N 次,霍尔电势相应变化N 次,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速(转速=60*频率/12) 三、需用器件与单元:霍尔转速传感器、转速调节2-24V 、转动源单元、数显单元的转速显示部分。 四、实验步骤: 1、根据图5-4,将霍尔转速传感器装于传感器支架上,探头对准反射面的磁 钢。 2、将直流源加于霍尔元件电源输入端。红(+)接+5V ,黑(┴)接地。 3、将霍尔转速传感器输出端(蓝)插入数显单元F in 端。 4、将转速调节中的2-24V 转速电源引到转动源的2-24V 插孔。 5、将数显单元上的转速/频率表波段开关拨到转速档,此时数显表指示转速。 6、调节电压使转动速度变化。观察数显表转速显示的变化。 五、思考题: 1、利用霍尔元件测转速,在测量上是否有限制? 2、本实验装置上用了十二只磁钢,能否用一只磁钢,二者有什么区别呢? 图1霍尔、光电、磁电转速传感器安装示意图
实验三十一光纤传感器测速实验 一、实验目的:了解光纤位移传感器用于测量转速的方法。 二、基本原理:利用光纤位移传感器探头对旋转体被测物反射光的明显变化产生的电脉冲,经电路处理即可测量转速。 三、需用器件与单元:光纤传感器、光纤传感器实验模块、转速/频率数显表、直流源±15V、转速调节2~24V,转动源模块。 四、实验步骤: 1、光纤传感器按图1装于传感器支架上,使光纤探头与电机转盘平台中磁钢反射点对准。 2、按“光纤位移特性实验”的连线图,如图2所示,将光纤传感器实验模 块输出V o1与数显电压表V i 端相接,接上实验模块上±15V电源,数显表的切换 开关选择开关拨到20V档。①用手转动圆盘,使探头避开反射面(暗电流),合 上主控箱电源开关,调节Rw 2使数显表显示接近零(≥0),此时Rw 1 处于中间位 置。②再用手转动圆盘,使光纤探头对准反射点,调节升降支架高低,使数显表 指示最大,重复①、②步骤,直至两者的电压差值最大,再将V o1 与转速/频率数显表fi输入端相接,数显表的波段开关拨到转速档。 图2光纤传感器位移实验模块 3、将转速调节2-24V,接入转动电源24V插孔上,使电机转动,逐渐加大转速源电压。使电机转速盘加快转动,固定某一转速,观察并记下数显表上的读 数n 1 。 4、固定转速电压不变,将选择开关拨到频率测量档,测量频率,记下频率 读数,根据转盘上的测速点数折算成转速值n 2 (转速和频率的折算关系为:转速=频率*60/12)。 5、将实验步骤4与实验步骤3比较,以转速n 1 作为真值计算两种方法的测