《计算机图形学基础》第2版(陆枫 何云峰)课后习题答案 电子工业出版社
第一章绪论
概念:计算机图形学、图形、图像、点阵法、参数法、
图形的几何要素、非几何要素、数字图像处理;
计算机图形学和计算机视觉的概念及三者之间的关系;
计算机图形系统的功能、计算机图形系统的总体结构。
第二章图形设备
图形输入设备:有哪些。
图形显示设备:CRT的结构、原理和工作方式。
彩色CRT:结构、原理。
随机扫描和光栅扫描的图形显示器的结构和工作原理。
图形显示子系统:分辨率、像素与帧缓存、颜色查找表等基本概念,分辨率的计算
第三章交互式技术
什么是输入模式的问题,有哪几种输入模式。
第四章图形的表示与数据结构
自学,建议至少阅读一遍
第五章基本图形生成算法
概念:点阵字符和矢量字符;
直线和圆的扫描转换算法;
多边形的扫描转换:有效边表算法;
区域填充:4/8连通的边界/泛填充算法;
内外测试:奇偶规则,非零环绕数规则;
反走样:反走样和走样的概念,过取样和区域取样。
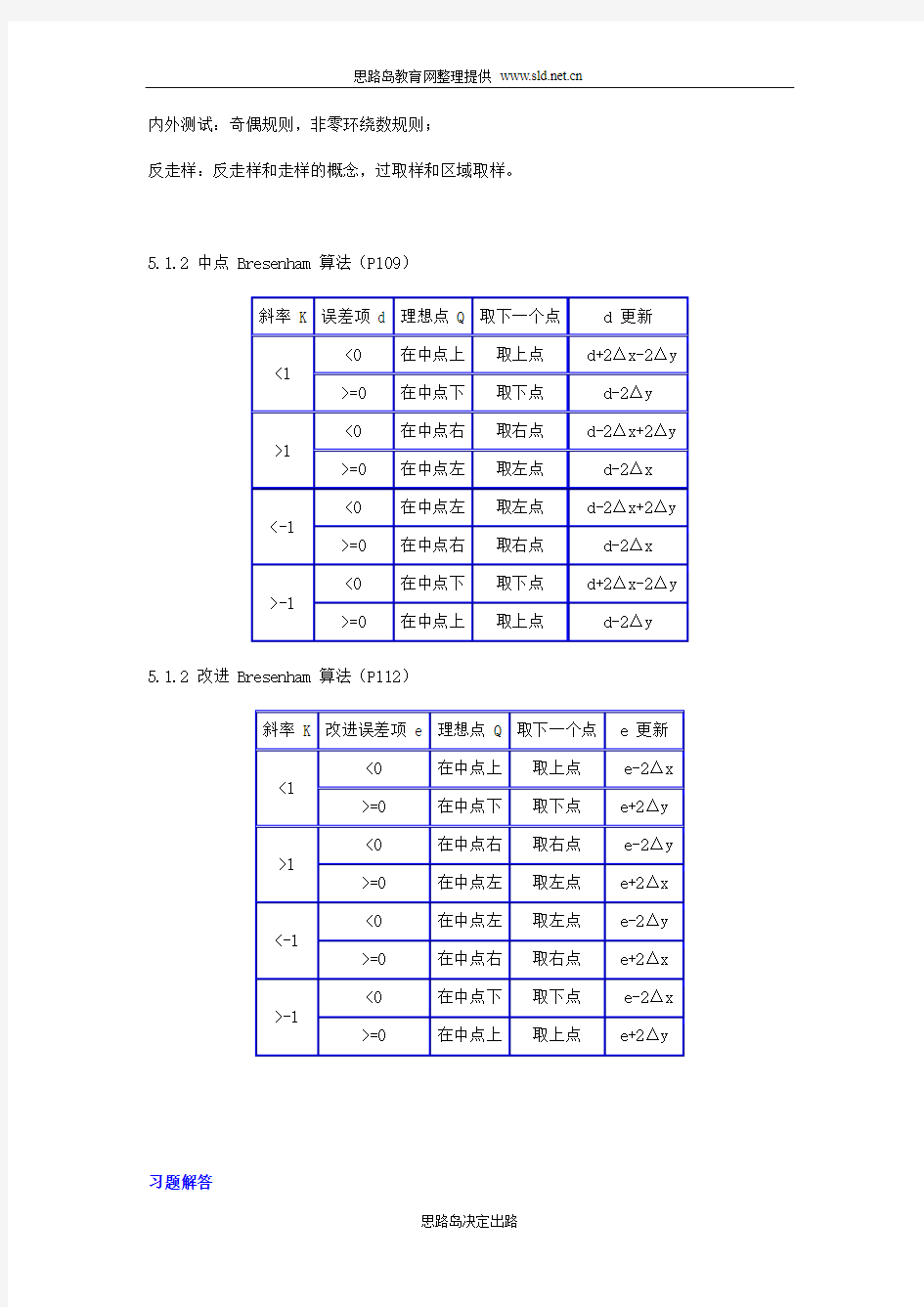
5.1.2 中点 Bresenham 算法(P109)
斜率 K 误差项 d 理想点 Q 取下一个点 d 更新
<0 在中点上取上点d+2△x-2△y
<1
>=0 在中点下取下点d-2△y
<0 在中点右取右点 d-2△x+2△y
>1
>=0 在中点左取左点d-2△x
<0 在中点左取左点 d-2△x+2△y
<-1
>=0 在中点右取右点d-2△x
<0 在中点下取下点d+2△x-2△y
>-1
>=0 在中点上取上点d-2△y 5.1.2 改进 Bresenham 算法(P112)
斜率 K 改进误差项 e 理想点 Q 取下一个点 e 更新
<0 在中点上取上点 e-2△x
<1
>=0 在中点下取下点e+2△y
<0 在中点右取右点 e-2△y
>1
>=0 在中点左取左点e+2△x
<0 在中点左取左点e-2△y
<-1
>=0 在中点右取右点e+2△x
<0 在中点下取下点 e-2△x
>-1
>=0 在中点上取上点e+2△y 习题解答
习题5(P144)
5.3 试用中点Bresenham算法画直线段的原理推导斜率为负且大于1的直线段绘制过程(要求写清原理、误差函数、递推公式及最终画图过程)。(P111)
解: k<=-1 |△y|/|△x|>=1 y为最大位移方向
故有
构造判别式:
推导d各种情况的方法(设理想直线与y=yi+1的交点为Q):
所以有: y Q-kx Q-b=0 且y M=y Q
d=f(x M-kx M-b-(y Q-kx Q-b)=k(x Q-x M)
所以,当k<0,
d>0时,M点在Q点右侧(Q在M左),取左点 P l(x i-1,y i+1)。
d<0时,M点在Q点左侧(Q在M右),取右点 Pr(x i,y i+1)。
d=0时,M点与Q点重合(Q在M点),约定取右点 Pr(x i,y i+1) 。
所以有
递推公式的推导:
d2=f(x i-1.5,y i+2)
当d>0时,
d2=y i+2-k(x i-1.5)-b 增量为1+k
=d1+1+k
当d<0时,
d2=y i+2-k(x i-0.5)-b 增量为1
=d1+1
当d=0时
,
5.7 利用中点 Bresenham 画圆算法的原理,
推导第一象限y=0到y=x圆弧段的扫描转换算法
(要求写清原理、误差函数、递推公式及最终画图过程)。(P115)
y坐标圆心角α误差项 d 理想点 Q 取下一个点 d 更新
y=0 y=x 0°<=α<=45°
<0 在中点右取右点 d+2y+3
>=0 在中点左取左点d-2(y-x)+5
y=x y=1 45°<=α<=90°
<0 在中点上取上点 d+2x+3
>=0 在中点下取下点d-2(x-y)+5
解:在x=y到y=0的圆弧中,(R,0)点比在圆弧上,算法从该点开始。
最大位移方向为y,由(R,0)点开始,y渐增,x渐减,每次y方向加1,x方向减1或减0。
设P点坐标(xi,yi),下一个候选点为右点Pr(xi,yi+1)和左点Pl(xi-1,yi+1),取Pl和Pr的中点M(xi-0.5,yi+1),设理想圆与y=yi+1的交点Q,
构造判别式:
d=f(x M,y M)=(x-0.5)2+(y i+1)2+R2
当d<0时,M在Q点左方(Q在M右),取右点Pr(xi,yi+1)
当d>0时,M在Q点右方(Q在M左),取左点Pl(xi-1,yi+1)
当d=0时,M与Q点重合,约定取左点Pl(xi-1,yi+1)
所以有:
推导判别式:
d>=0时,取左点Pl(xi-1,yi+1),下一点为(xi-1,yi+2)和(xi-2,yi+2)
d<0时,取右点Pr(xi,yi+1),下一点为(xi,yi+2)和(xi-1,yi+2)
d0=f(R-0.,1)=R2-R+0.25+1-R2=1.25-R
5.11 如图5-59所示多边形,若采用扫描转换算法(ET边表算法)进行填充,
试写出该多边形的边表ET和当扫描线Y=4时的有效边表AET(活性边表)。(P125)
解:
1)边表ET表
x|ymin ymax 1/k next
2)y=4时的有效边表AET
x ymax 1/k next
注意:水平线不用计算。
5.22 构造两个例子,一个是4-连通图,其边界是8-连通的,另一个是8-连通图,其边界是4-连通的。(P132)
解:
4-连通区域 8-连通区域
第六章二维变换及二维观察
概念:齐次坐标,窗口,视区,二维观察流程,
字符裁减的三种策略,外部裁减
计算:二维几何变换
直线裁减:区域编码法和梁友栋算法
多边形裁减:逐边裁减法和双边裁减法
6.1.3 二维变换矩阵(P147)
3阶二维变换矩阵子矩阵功能
a b p c d q l m s abcd 比例旋转 pq 投影变换lm 平移变换 s 整体比例
6.2.3 旋转变换(P149)
逆时针变换矩阵顺时针变换矩阵
cosθ sinθ 0
-sinθ cosθ 0
0 0 1
cosθ -sinθ 0
sinθ cosθ 0
0 0 1
6.2.5 相对任一参考点的二维几何变换(P155) 例如:相对(xf,yf)点的旋转变换
平移到坐标原点旋转角度θ
反平移回
原来位置
1 0 0 0 1 0 -xf -yf 1 cosθ sinθ 0
-sinθ cosθ 0
0 0 1
1 0 0
0 1 0
xf yf 1
习题6(P177)
6.7 求四边形 ABCD 绕 P(5,4)旋转45度的变换矩阵和端点坐标,画出变换后的图形。(P147 P148 P155)
解:变换的过程包括:
1)平移:将点P(5,4)平移至原点(0,0),
2)旋转:图形绕原点(0点)旋转45度,
3)反平移:将P点移回原处(5,4),
4)变换矩阵:平移—旋转—反平移
5)变换过程:四边形 ABCD 的规范化齐次坐标(x,y,1) * 3阶二维变换矩阵
由旋转后四边形 ABCD 的规范化齐次坐标(x',y',1)可写出顶点坐标:
A'(6.4,1.2) B'(7.1,4.7) C'(4.3,8.5) D'(2.2,1.2)
6.15 用梁友栋算法裁减线段AB,B点的坐标改为(-2,-1)(P170)
解:以A(3,3)为起点,B(-2,-1)为终点
所以有x1=3,y1=3,x2=-2,y2=-1,wxl=0,wxr=2,wyb=0,wyt=2
构造直线参数方程:
x=x1+u(x2-x1)
0 x1x x2
y A(3,3)
3 C(7/4,2)
2
D(0,3/5) 1
-2 -1 0 12 3x B(-2,-1) -1
x=x1+u(x2-x1) (0<=u<=1)
y=y1+u(y2-y1)
把 x1=3,y1=3,x2=-2,y2=-1 代入得
x=3-5u
y=3-4u
计算各个p和q值有:
p1=x1-x2=5 q1=x1-wxl=3
p2=x2-x1=-5 q2=wxr-x1=-1
p3=y1-y2=4 q3=y1-wyb=3
p4=y2-y1=-4 q4=wyt-y1=-1
根据,u k=q k/p k 算出
p k<0时:u2=1/5 u4=1/4
p k>0时:u1=3/5 u3=3/4
u max=MAX(0,u2,u4)=MAX(0,1/5,1/4)=1/4 (取最大值)
u min=MIN(u1,u3,1)=MIN(3/5,3/4,1)=3/5 (取最小值)
由于 u max
p k<0时,将 u max=1/4 代入直线参数方程
x=x1+u(x2-x1)
x=3+1/4*(-5)=3-5/4=7/4
y=y1+u(y2-y1)
y=3+1/4*(-4)=2
求出直线在窗口内部分的端点C(7/4,2)
p k>0时,将 u min=3/5代入直线参数方程
x=x1+u(x2-x1)
x=3+3/5*(-5)=0
y=y1+u(y2-y1)
y=3+3/5*(-4)=3/5
求出直线在窗口内部分的端点D(0,3/5)。
所以,直线在窗口内部分的端点为C(7/4,2),D(0,3/5)。
第七章三维变换及三维观察
概念:几何变换、投影变换、透视投影、平行投影、灭点
平面几何投影的分类以及分类原则
计算:三维几何变换、三视图
7.2 三维几何变换(P180)
4阶三维变换矩阵子矩阵功能
a b c p
d e f q g h i r l m n s abcdefghi 比例旋转 pqr 透视投影 lmn 平移变换 s 整体比例
整体比例变换(P182)
s>1 时,整体缩小,如 2 表示2:1缩小。 s<1 时,整体放大,如 1/2 表示1:2放大。
7.3.1 正投影
1.主视图 V(P191)
4阶三维变换矩阵
y轴方向投影
1 0 0 0
0 0 0 0
0 0 1 0
0 0 0 1
2.俯视图 H
4阶三维变换矩阵
1 0 0 0
0 0 -1 0
0 0 0 0
0 0 -z0 1
z轴方向投影绕x轴旋转-90度z轴方向平移-1 1 0 0 0
0 1 0 0
0 0 0
0 0 0
1 1 0 0 0
0 cos(-90°) sin(-90°) 0
0 -sin(-90°) cos(-90°)0
0 0 0 1
1 0 0
0 1 0 0
0 0 1 0
0 0 -z0 1
3.侧视图 W (P192)
4阶三维变换矩阵
0 0 0 0 -1 0 0 0 0 0 1 0 -x0 0 0 1
x 轴方向投影 绕 z 轴旋转90度
x 轴方向平移
-1 0 0 0 0 0 1 0 0 0 0 1 0
0 0 0 1 0 cos90° sin90° 0 0 -sin90° cos90° 0 0 0 1 0
0 0 0 1 1 0 0 0 0 1 0 0 0 0 1 0 -x0 0 0 1
习题7 (P213)
7.5 求空间四面体关于点 P(2,-2,2)整体放大2倍的变换矩阵, 画出变换后的图形。(P182) 解:关于点 P(2,-2,2)整体放大两倍,
变换矩阵:点 P(2,-2,2)平移至原点--比例变换放大两倍--反平移回点 P(2,-2,2)。
变换过程:空间四面体 ABCD 的规范化齐次坐标(x,y,z,1) * 4阶三维比例变换矩阵
空间四面体 ABCD 的齐次坐标(x',y',z',1/2)转换成规范化齐次坐标
顶点
x y z 1 A B C
D 2,2,-2,1 2,6,-2,1 -2,6,-2,1
2,6, 2,1
由比例变换后规范化齐次坐标(x',y',z',1)可写出顶点坐标: A'(2,2,-2) B'(2,6,-2) C'(-2,6,-2) D'(2,6,2)
7.7 求空间四面体 ABCD 三视图的变换矩阵(平移矢量均为1),并作出三视图。(P180) 解:
1)主视图V(P191)
空间四面体 ABCD 的规范化齐次坐标矩阵 * Y 轴方向投影矩阵(不需要平移)
2)俯视图H(P191)
Z 轴方向投影矩阵 * 绕X 轴旋转-90度矩阵 * Z 轴方向平移-1矩阵
空间四面体 ABCD 的规范化齐次坐标矩阵 * 投影变换矩阵(可以直接写出)
3)侧视图W(P192)
X轴方向投影矩阵 * 绕Z轴旋转90度矩阵 * X轴方向平移-1矩阵
空间四面体 ABCD 的规范化齐次坐标矩阵 * 投影变换矩阵(可以直接写出)
4)画图注意:三个图画在同一坐标系中,点与点的连接关系以及直线的可见性问题。
试题分析
《计算机图形学》考试试题
一、填空
2.帧缓存(P42):(1024*768*8/8)/1024=768kB
颜色位面数(P43):24
总颜色数:(2^8)^3=2^24=(2^4)*(2^20)=16MB
二、名词解释
三、简答与计算
3.边标志算法(P128)
解:打标记:x1,x2,x3,x4
填充:x1与x2,x3与x4扫描线区间的像素点。
5.正则集合运算(P88)
解:通常意义下的集合求交运算:C=A∩B有一条弧立边
正则集合运算:C=A∩*B无弧立边
四、计算作图题
1.中点 Bresenham 算法(P109)
斜率 K 误差项 d 理想点 Q 取下一个点 d 更新
<0 在中点上取上点d+2△x-2△y
<1
>=0 在中点下取下点d-2△y 解:直线斜率:k=(6-1)/(9-1)=5/8 0 计算初值:△x=9-1=8 △y=6-1=5 d=△x-2△y=8-2*5=-2 取上点:2△x-2△y=2*8-2*5=6 d+2△x-2△y=-2+6=4 取下点:2△y=2*5=10 d-2△y=4-10=-6 x y 误差项 d 取下一个点 d 更新 1 1 <0 取上点d+2△x-2△y=4 2 2 >0 取下点d-2△y=-6 3 2 <0 取上点d+2△x-2△y=0 4 3 =0 取下点d-2△y=-10 5 3 <0 取上点d+2△x-2△y=-4 6 4 <0 取上点d+2△x-2△y=2 7 5 >0 取下点d-2△y=-8 8 5 <0 取上点d+2△x-2△y=-2 9 6 2.改进的有效边表算法(P125) 解:1)边表 ET:交点x(最小y坐标 ymin) x|ymin ymax 1/k next x坐标 1 CB边CA边 2 → 6 5 -4/ 3 → 6 9 -2/7 / 3 4 BA边 5 → 2 9 -1/2 / 6 7 8 9 2)y=4的有效边表 AET:交点x x ymax 1/k next y=4 |与CB边相交 ┗→ 3.3 5 -4/3 ┓ ┏—————————┛ |与CA边相交 ┗→ 5.4 9 -1/2 / 3)y=4时的填充交点对:(3.3,4) (5.4,4) 3.求三角形绕B点(2,5)旋转θ的变换矩阵。 求三角形绕B点顺时针旋转90度后各端点坐标。(P125)解:1)三角形绕B点(2,5)旋转θ的变换矩阵 T=T t * T R * T t-1 平移到坐标原点旋转角度θ 反平移回 原来位置 1 0 0 0 1 0 - 2 -5 1 cosθ sinθ 0 -sinθ cosθ 0 0 0 1 1 0 0 0 1 0 2 5 1 2)三角形绕B点顺时针旋转90度的变换矩阵,θ=-90° T=T t * T R * T t-1 平移到坐标原点旋转角度θ 反平移回 原来位置 1 0 0 0 1 0 - 2 -5 1 cos90° -sin90° 0 sin90°cos90° 0 0 0 1 1 0 0 0 1 0 2 5 1 变换过程:三角形 ABC 的规范化齐次坐标(x,y,1) * 3阶二维变换矩阵 P=P * T 得到三角形 ABC 变换后的规范化齐次坐标(x',y',1) 顶点 x y 1 A 4.6 2 1 B C 2 5 1 0 -1 1 可以写出顶点坐标:A'(4.6,2) B'(2,5) C'(0,-1) 4.用编码裁剪算法裁剪线段P1(0,2)P2(3,3)。要求写出:(164) 1)窗口边界划分的9个区间的编码原则; 2)线段端点的编码; 3)裁剪的主要步骤; 4)裁剪的输出结果。 解:线段P1(0,2)P2(3,3)的编码裁剪 y100110001010 4 0001 P2(3,3) 0000 S 0010 3 P1(0,2) 2 1 010********* 0 1 2 3 4 x 1)窗口边界划分的9个区间的编码原则; 编码D3 D2 D1 D0 窗口外上边top 下边bottom 右边right 左边left 条件 y>wyt wyt=4 y wyb=1 x>wxr wxr=4 x wxl=1 取值D3=1 D2=1 D1=1 D0=1 2)线段端点的编码; P1 code1=0001, P2 code2=0000 3)裁剪的主要步骤; 输入 P1(0,2), P2(3,3), wyt=4, wyb=1, wxr=4, wxl=1; P1 code1=0001, P2 code2=0000; code1|code2≠0 不能简取;code1&code2=0 不能简弃; 求线段 P1(0,2)P2(3,3)和窗口左界wxl=1 的交点, 把 wxl=1 代入直线方程求出 y=kx+b=(1/3)*x+2=2.3 交点坐标S(1,2.3)替换端点坐标P1(0,2),使P1坐标为(1,2.3); 去掉P1S线段,输出线段P1P2。 4)裁剪的输出结果:P1(1,2.3)P2(3,3)。 5.用改进 Bresenham 算法画直线段的原理, 推导斜率 K>1 的直线段的扫描转换算法。(P112) 斜率 K 改进误差项 e 理想点 Q 取下一个点 e 更新 <0 在中点右取右点 e-2△y >1 >=0 在中点左取左点e+2△x 解: k>1 y为最大位移方向 故有 y i+1= y i+1 x i+1 (d>0.5 取右点Pr) x i+1= x i (d<=0.5 取左点Pl) 误差项 d 的初值为0 d=d+1/k 当 x 方向走一步 d-1 令 e=d-0.5 第2章符号运算 习题2及解答 1 说出以下四条指令产生的结果各属于哪种数据类型,是“双精度” 对象,还是“符号”符号对象 3/7+; sym(3/7+; sym('3/7+'); vpa(sym(3/7+) 〖目的〗 不能从显示形式判断数据类型,而必须依靠class指令。 〖解答〗 c1=3/7+ c2=sym(3/7+ c3=sym('3/7+') c4=vpa(sym(3/7+) Cs1=class(c1) Cs2=class(c2) Cs3=class(c3) Cs4=class(c4) c1 = c2 = 37/70 c3 = c4 = Cs1 = double Cs2 = sym Cs3 = sym Cs4 = sym 2 在不加专门指定的情况下,以下符号表达式中的哪一个变量被认 为是自由符号变量. sym('sin(w*t)'),sym('a*exp(-X)'),sym('z*exp(j*th)') 〖目的〗 理解自由符号变量的确认规则。 〖解答〗 symvar(sym('sin(w*t)'),1) ans = w symvar(sym('a*exp(-X)'),1) ans = a symvar(sym('z*exp(j*th)'),1) ans = z 5求符号矩阵???? ??????=3332 31 232221 131211 a a a a a a a a a A 的行列式值和逆,所得结果应采用“子表达式置换”简洁化。 〖目的〗 理解subexpr 指令。 〖解答〗 A=sym('[a11 a12 a13;a21 a22 a23;a31 a32 a33]') DA=det(A) IA=inv(A); [IAs,d]=subexpr(IA,d) A = [ a11, a12, a13] [ a21, a22, a23] [ a31, a32, a33] DA = a11*a22*a33 - a11*a23*a32 - a12*a21*a33 + a12*a23*a31 + a13*a21*a32 - a13*a22*a31 IAs = [ d*(a22*a33 - a23*a32), -d*(a12*a33 - a13*a32), d*(a12*a23 - a13*a22)] [ -d*(a21*a33 - a23*a31), d*(a11*a33 - a13*a31), -d*(a11*a23 - a13*a21)] [ d*(a21*a32 - a22*a31), -d*(a11*a32 - a12*a31), d*(a11*a22 - a12*a21)] d = 1/(a11*a22*a33 - a11*a23*a32 - a12*a21*a33 + a12*a23*a31 + a13*a21*a32 - a13*a22*a31) 8(1)通过符号计算求t t y sin )(=的导数 dt dy 。(2)然后根据此结果,求- =0t dt dy 和2 π = t dt dy 。 〖目的〗 diff, limit 指令的应用。 如何理解运行结果。 〖解答〗 syms t 5.在借贷记账法下,有关账户之间形成的应借应贷的相互关系称为账户对应关系。()第二章会计记账方法 6.总分类账户与明细分类账户进行平行登记时的所谓同时登记,确切地说应该是同一会计期间作业一: 登记。()一,单项选择题: 7.平行登记的要求中,所谓登记方向一致,是指会计分录中总分类账户和明细分类账户的记账 1.下列科目中属于流动资产的是() 符号是一致的。()A预提费用B短期借款C资本公积D应收账款 8.采用借贷记账法,每发生一笔经济业务必定要在两个账户中同时登记。() 2.企业全部资产减去全部负债后的净额,就是企业的() 四,名词解释A所有者权益B实收资本C资本公积D盈余公积 平行登记发生额平衡法余额平衡法 3.预付供货单位货款属于企业的一项() 五,简答题A资产B负债C收入D费用 1.简述借贷复式记账法的内容和特点。 4.经济业务发生后,会计等式的平衡关系() 2.简述总账和明细账平行登记的要点及两者数量关系核对的公式。 A可能会受影响B不一定受影响C必然不受影响D必然受影响 3.简述借贷记账法的试算平衡。 5.资产与权益的平衡关系是指() 六,综合题A一项资产金额与一项权益金额的相等关系B几项资产金额与一项权益金额的相等关系 1.计算题C流动资产合计金额与流动负债金额的相等关系D资产总额与权益总额的相等关系 某企业有关会计要素的数据如下: 6.引起资产内部一个项目增加,另一个项目减少,而资产总额不变的经济业务是() 负债5000万元;所有者权益8000万元;A用银行存款偿还短期借款B收到投资者投入的机器一台C收到外单位前期欠的货款 费用200万元;利润6000万元;D收到国家拨入的特种储备物资 要求: 计算资产总额和收入总额 7.企业用借款直接偿还应付购货款,属于() 2.某公司设有以下账户: 实收资本、本年利润、现金、银行存款、待摊费用、预提费用、原材A资产项目和权益项目同增B权益项目之间此增彼减C资产项目和权益项目同减 料、固定资产、其他应收款、应收账款、应付账款、预收账款、预付账款、其他应付款、材料采D资产项目之间此增彼减 购、累计折旧、管理费用、财务费用、营业费用、主营业务收入、其他业务收入、营业外收入、 8.只有采用权责发生制原则核算的企业,才需要设置() 主营业务成本、其他业务支出、应交税金、短期借款、资本公积、制造费用、生产成本、库存商A待摊费用B本年利润C银行存款D库存商品 第二章需求、供给和均衡价格 1. 已知某一时期内某商品的需求函数为Q d=50-5P,供给函数为Q s=-10+5P。 (1)求均衡价格P e和均衡数量Q e,并作出几何图形。 (2)假定供给函数不变,由于消费者收入水平提高,使需求函数变为Q d=60-5P。求出相应的均衡价格P e和均衡数量Q e,并作出几何图形。 (3)假定需求函数不变,由于生产技术水平提高,使供给函数变为Q s=-5+5P。求出相应的均衡价格P e和均衡数量Q e,并作出几何图形。 (4)利用(1)、(2)和(3),说明静态分析和比较静态分析的联系和区别。 (5)利用(1)、(2)和(3),说明需求变动和供给变动对均衡价格和均衡数量的影响。 解答:(1)将需求函数Q d=50-5P和供给函数Q s=-10+5P代入均衡条件Q d=Q s,有50-5P=-10+5P 得P e=6 将均衡价格P e=6代入需求函数Q d=50-5P,得 Q e=50-5×6=20 或者,将均衡价格P e=6代入供给函数Q s=-10+5P,得 Q e=-10+5×6=20 所以,均衡价格和均衡数量分别为P e=6,Q e=20。如图2—1所示。 图2—1 (2)将由于消费者收入水平提高而产生的需求函数Q d=60-5P和原供给函数Q s=-10+5P代入均衡条件Q d=Q s,有 60-5P=-10+5P 得P e=7 将均衡价格P e=7代入Q d=60-5P,得 Q e=60-5×7=25 或者,将均衡价格P e=7代入Q s=-10+5P,得 Q e=-10+5×7=25 所以,均衡价格和均衡数量分别为P e=7,Q e=25。如图2—2所示。 图2—2 (3)将原需求函数Q d=50-5P和由于技术水平提高而产生的供给函数Q s=-5+5P代入均衡条件Q d=Q s,有 50-5P=-5+5P 得P e=5.5 将均衡价格P e=5.5代入Q d=50-5P,得 Q e=50-5×5.5=22.5 或者,将均衡价格P e=5.5代入Q s=-5+5P,得 Q e=-5+5×5.5=22.5 所以,均衡价格和均衡数量分别为P e=5.5,Q e=22.5。如图2—3所示。 2.2)1 ()3,0 x f x x ==; 解: 11 lim 11 lim lim ()lim 3330 lim ()lim 333 x x x x x x x x x x f x f x - →--+ →++-∞ →→+∞ →→========+∞ 因为0 lim ()lim ()x x f x f x - + →→≠,所以3 lim ()x f x →-不存在。 3)2 11(),02x f x x - ?? == ? ?? ; 解: 2 10000 11lim ()lim ()lim ()lim 22x x x x x f x f x f x -+- -∞ →→→→?? ??=====+∞ ? ??? ?? 所以3 lim ()x f x →-不存在。 4)3,3 9)(2 -=+-= x x x x f ; 解:63 ) 3)(3(lim )(lim )(lim 3 3 3 -=+-+==+ + - -→-→-→x x x x f x f x x x 故极限6)(lim 3 -=-→x f x 2 2 2 2 2 5).lim ()224,lim ()3215, lim ()lim (),lim ()x x x x x f x f x f x f x f x -+-+→→→→→=?==?-=≠解:因为所以不存在。 ()0 6.lim ()lim 21,lim ()lim cos 12,lim ()lim (),lim ()x x x x x x x x f x f x x f x f x f x --++-+→→→→→→→===+=≠)解:因为所以不存在。 7)1()arctan ,0f x x x ==; 第二章力系的简化 2-1.通过A(3,0,0),B(0,4,5)两点(长度单位为米),且由A指向B的力F,在z轴上投影为,对z轴的矩的大小为。 答:F/2;62F/5。 2-2.已知力F的大小,角度φ和θ,以及长方体的边长a,b,c,则力F在轴z和y上的投影:Fz= ;Fy= ;F对轴x的矩 M x(F)= 。 答:Fz=F·sinφ;Fy=-F·cosφ·cosφ;Mx(F)=F(b·sinφ+c·cosφ·cosθ) 图2-40 图2-41 2-3.力F通过A(3,4、0),B(0,4,4)两点(长度单位为米),若F=100N,则该力在x轴上的投影为,对x轴的矩为。 答:-60N; 2-4.正三棱柱的底面为等腰三角形,已知OA=OB=a,在平面ABED内有沿对角线AE的一个力F,图中α=30°,则此力对各坐标轴之矩为: M x(F)= ;M Y(F)= ;M z(F)= 。 答:M x(F)=0,M y(F)=-Fa/2;M z(F)=6Fa/4 2-5.已知力F的大小为60(N),则力F对x轴的矩为;对z轴的矩为。 答:M x(F)=160 N·cm;M z(F)=100 N·cm 图2-42 图2-43 2-6.试求图示中力F 对O 点的矩。 解:a: M O (F)=F l sin α b: M O (F)=F l sin α c: M O (F)=F(l 1+l 3)sin α+ F l 2cos α d: ()22 21l l F F M o +=αsin 2-7.图示力F=1000N ,求对于z 轴的力矩M z 。 题2-7图 题2-8图 2-8.在图示平面力系中,已知:F 1=10N ,F 2=40N ,F 3=40N ,M=30N ·m 。试求其合力,并画在图上(图中长度单位为米)。 解:将力系向O 点简化 R X =F 2-F 1=30N R V =-F 3=-40N ∴R=50N 主矩:Mo=(F 1+F 2+F 3)·3+M=300N ·m 合力的作用线至O 点的矩离 d=Mo/R=6m 合力的方向:cos (R ,)=,cos (R ,)=- 第二章贸易术语 思考题答案 1. 试述贸易术语的含义、性质及在国际贸易中的作用。 贸易术语(trade terms),也称贸易条件、价格术语(price terms),是在国际贸易的长期实践中逐渐形成的用一个简短的概念或外文缩写来表明商品的价格构成、说明货物交接过程中有关的风险、责任和费用划分问题的专门术语。 贸易术语具有两重性,即一方面表示交货条件,另一方面表示成交价格的构成因素。 贸易术语在国际贸易中起着积极的作用,主要表现在下列几个方面: (1)有利于买卖双方洽商交易和订立合同; (2)有利于买卖双方核算价格和成本; (3)有利于解决买卖双方的争议。 2. 有关国际贸易术语的国际贸易惯例主要有哪几种?分别解释了哪些贸易术语? 目前,国际上有关贸易术语的国际惯例有三种。 (1)《1932年华沙-牛津规则》 它对CIF合同的性质、特点及买卖双方的权利和义务都作了具体的规定和说明,为那些按CIF贸易术语成交的买卖双方提供了一套易于使用的统一规则。 (2)《1941年美国对外贸易定义修正本》 该定义对以下六种贸易术语作了解释:Ex(Point of Origin)、FOB(Free on Board)、FAS (Free Along Side)、C&F(Cost and Freight)、CIF(Cost,Insurance and freight)和Ex Dock (named port of importation)。 (3)《2000年国际贸易术语解释通则》 它解释了四组13个贸易术语。第一组为“E”组(EX WORKS),第二组为“F”组(FCA、FOB和FAS),第三组为“C”组(CFR、CIF、CPT和CIP),第四组为“D”组(DAF、DES、DEQ、DDU和DDP)。 3. 什么是《INCOTERMS 2000》?试分别指出各组术语的共同点以及13个术语的交货点。 《INCOTERMS 2000》(《2000年国际贸易术语解释通则》)是国际商会为统一对各种贸易术语的解释而制定的一种通用的有关贸易术语的国际贸易惯例。最早的版本制定于1936年,后来经过了多次修改和补充:1953、1967、1976、1980、1990年先后进行过5次修订和补充,最近的一次修订是在2000年,故称为《INCOTERMS 2000》。 它解释了四组13个贸易术语。 E组只有一个贸易术语,即EXW(工厂交货),其特点是卖方在自己的地点把货物备妥或交至买方处置之下。 F组有3个贸易术语(FCA、FAS、FOB),其共同点是卖方须将货物交至买方指定的承运人,不负责运输及保险等事宜。 C组有4个贸易术语(CFR、CIF、CPT、CIP),其共同点是卖方须签订运输合同,支付运费,但货物灭失或损坏的风险及装船和启运后发生意外所产生的费用,卖方不承担责任。 D组有5个贸易术语(DAF、DES、DEQ、DDU、DDP),其特点是卖方须承担把货物交至指定的进口国交货地点的全部费用和风险,且按D组术语成交的贸易合同,称为到货 第二章 尺寸公差与圆柱结合的互换性 习题参考答案 2-11已知某配合中孔、轴的基本尺寸为60mm ,孔的下偏差为零,孔的公差为0.046mm ,轴的上偏差为-0.010mm ,轴的公差为0.030mm 。试计算孔、轴的极限尺寸,并写出它们在图样上的标注形式,画出孔、轴的尺寸公差带图解。 解:根据题意可知, D(d)=?60mm ,EI=0,T h =46μm ,es=-10μm ,T s =30 μm 。 ∵EI ES T h -= ∴46046=+=+=EI T ES h μm ∴046.60046.0000.60max =+=+=ES D D mm 000.600000.60min =+=+=EI D D mm ∵ei es T s -= ∴403010-=--=-=s T es ei μm ∴99.59)01.0(000.60max =-+=+=es d d mm 96.59)04.0(000.60min =-+=+=ei d d mm 孔、轴的图样标注,如图所示 公差带图解,如图所示 2-12已知某配合中孔、轴的基本尺寸为40mm ,孔的最大极限尺寸为40.045mm ,最小极限尺寸为40.02mm ,轴的最大极限尺寸为40mm ,轴的最小极限尺寸为39.084mm 。试求孔、轴的极限偏差、基本偏差和公差,并画出孔、轴的尺寸公差带图解。 解:根据已知条件, D(d)= ?40mm ,D max = ?40.045mm ,D max = ?40.020mm ,d max = ?40.000mm ,D max = ?39.084mm 。 ∵045.0000.40045.40max =-=-=D D ES mm ,, 020.0000.40020.40min =-=-=D D EI mm , ∴025.0020.0045.0=-=-=EI ES T h mm 孔的基本偏差为下偏差,EI=0.020mm ∵0000.40000.40max =-=-=d d es mm , 916.0000.40084.39min -=-=-=d d ei mm ∴916.0)916.0(0=--=-=ei es T s mm 轴的基本偏差为上偏差,es=0 + 45 20 第二章需求、供给和均衡价格 1.解: (1)将需求函数Q d= 50-5P和供给函数Q s=-10+5P代入均衡条件Q d=Q s ,有:50- 5P= -10+5P 得: Pe=6 以均衡价格Pe =6代入需求函数Q d=50-5p ,得: Qe=50-5×6 或者,以均衡价格 Pe =6 代入供给函数Q s =-10+5P ,得:Qe=-10+5×6 所以,均衡价格和均衡数量分别为Pe =6 , Qe=20 图略. (2)将由于消费者收入提高而产生的需求函数Q d=60-5p和原供给函数Q s=-10+5P, 代入均 衡条件Q d=Q s有: 60-5P=-10+5P 解得Pe =7 以均衡价格Pe =7代入Q d=60-5p ,得 Qe=25 或者,以均衡价格Pe =7代入Qs =-10+5P, 得Qe=25 所以,均衡价格和均衡数量分别为Pe =7,Qe=25 (3)将原需求函数Q d=50-5p 和由于技术水平提高而产生的供给函数Q s=-5+5p ,代入均衡条件Q d=Q s,有: 50-5P=-5+5P得 P e=5.5 以均衡价格Pe=5.5代入Q d=50-5p, 得Qe=50-5×5.5=22.5 所以,均衡价格和均衡数量分别为Pe=5.5,Qe=22.5图略。 (4)(5)略 2.解: (1)根据中点公式计算,e d=1.5 (2)由于当P=2时,Q d=500-100*2=300, 所以,有: 22 .(100)3003 d dQ P dP Q e =- =--*= (3)作图,在a 点P=2时的需求的价格点弹性为:e d =GB/OG=2/3或者e d =FO/AF=2/3 显然,利用几何方法求出P=2时的需求的价格弹性系数和(2)中根据定义公式求出结果是相同的,都是e d =2/3 3解: (1) 根据中点公式 求得:4 3 s e = (2) 由于当P=3时,Qs=-2+2×3=4,所以 3 .2 1.54 s dQ P dP Q e = =?= (3) 作图,在a 点即P=3时的供给的价格点弹性为:e s =AB/OB=1.5 显然,在此利用几何方法求出的P=3时的供给的价格点弹性系数和(2)中根据定义公式求出的结果是相同的,都是e s =1.5 4.解: (1)根据需求的价格点弹性的几何方法,可以很方便地推知:分别处于不同的线性需求曲线上的a 、b 、e 三点的需求的价格点弹性是相等的,其理由在于,在这三点上都有: e d =FO/AF (2)根据求需求的价格点弹性的几何方法,同样可以很方便地推知:分别处于三条线性需求曲线上的a 、e 、f 三点的需求的价格点弹性是不相等的,且有e da 第2章人工智能与知识工程初步 1. 设有如下语句,请用相应的谓词公式分别把他们表示出来:s (1)有的人喜欢梅花,有的人喜欢菊花,有的人既喜欢梅花又喜欢菊花。 解:定义谓词d P(x):x是人 L(x,y):x喜欢y 其中,y的个体域是{梅花,菊花}。 将知识用谓词表示为: (?x )(P(x)→L(x, 梅花)∨L(x, 菊花)∨L(x, 梅花)∧L(x, 菊花)) (2) 有人每天下午都去打篮球。 解:定义谓词 P(x):x是人 B(x):x打篮球 A(y):y是下午 将知识用谓词表示为:a (?x )(?y) (A(y)→B(x)∧P(x)) (3)新型计算机速度又快,存储容量又大。 解:定义谓词 NC(x):x是新型计算机 F(x):x速度快 B(x):x容量大 将知识用谓词表示为: (?x) (NC(x)→F(x)∧B(x)) (4) 不是每个计算机系的学生都喜欢在计算机上编程序。 解:定义谓词 S(x):x是计算机系学生 L(x, pragramming):x喜欢编程序 U(x,computer):x使用计算机 将知识用谓词表示为: ? (?x) (S(x)→L(x, pragramming)∧U(x,computer)) (5)凡是喜欢编程序的人都喜欢计算机。 解:定义谓词 P(x):x是人 L(x, y):x喜欢y 将知识用谓词表示为: (?x) (P(x)∧L(x,pragramming)→L(x, computer)) 2 请对下列命题分别写出它们的语义网络: (1) 每个学生都有一台计算机。 解: (2) 高老师从3月到7月给计算机系学生讲《计算机网络》课。 解: (3) 学习班的学员有男、有女、有研究生、有本科生。 解:参例2.14 (4) 创新公司在科海大街56号,刘洋是该公司的经理,他32岁、硕士学位。 解:参例2.10 (5) 红队与蓝队进行足球比赛,最后以3:2的比分结束。 解: 定性数据分析第二章 课后答案 第二章课后作业 【第1题】 解:由题可知消费者对糖果颜色的偏好情况(即糖果颜色的概率分布),调查 者取500块糖果作为研究对象,则以消费者对糖果颜色的偏好作为依据,500块糖果的颜色分布如下表1.1所示: 表1.1 理论上糖果的各颜色数 由题知r=6,n=500,我们假设这些数据与消费者对糖果颜色的偏好分布是相符,所以我们进行以下假设: 原假设::0H 类i A 所占的比例为)6,...,1(0==i p p i i 其中i A 为对应的糖果颜色,)6,...,1(0=i p i 已知,16 10=∑=i i p 则2χ检验的计算过程如下表所示: 在这里6=r 。检验的p 值等于自由度为5的2χ变量大于等于18.0567的概率。在Excel 中输入“)5,0567.18(chidist =”,得出对应的p 值为 05.00028762.0<<=p ,故拒绝原假设,即这些数据与消费者对糖果颜色的偏好 分布不相符。 【第2题】 解:由题可知 ,r=3,n=200,假设顾客对这三种肉食的喜好程度相同,即顾 客选择这三种肉食的概率是相同的。所以我们可以进行以下假设: 原假设 )3,2,1(3 1 :0==i p H i 则2χ检验的计算过程如下表所示: 在这里3=r 。检验的p 值等于自由度为2的2χ变量大于等于15.72921的概率。在Excel 中输入“)2,72921.15(chidist =”,得出对应的p 值为 05.00003841.0<<=p ,故拒绝原假设,即认为顾客对这三种肉食的喜好程度是 不相同的。 【第3题】 解:由题可知 ,r=10,n=800,假设学生对这些课程的选择没有倾向性,即选 各门课的人数的比例相同,则十门课程每门课程被选择的概率都相等。所以我们可以进行以下假设: 原假设)10,...,2,1(1.0:0==i p H i 则2χ检验的计算过程如下表所示: 简答题 什么是伽利略相对性原理什么是狭义相对性原理 答:伽利略相对性原理又称力学相对性原理,是指一切彼此作匀速直线运动的惯性系,对于描述机械运动的力学规律来说完全等价。 狭义相对性原理包括狭义相对性原理和光速不变原理。狭义相对性原理是指物理学定律在所有的惯性系中都具有相同的数学表达形式。光速不变原理是指在所有惯性系中,真空中光沿各方向的传播速率都等于同一个恒量。 同时的相对性是什么意思如果光速是无限大,是否还会有同时的相对性 答:同时的相对性是:在某一惯性系中同时发生的两个事件,在相对于此惯性系运动的另一个惯性系中观察,并不一定同时。 如果光速是无限的,破坏了狭义相对论的基础,就不会再涉及同时的相对性。 什么是钟慢效应 什么是尺缩效应 答:在某一参考系中同一地点先后发生的两个事件之间的时间间隔叫固有时。固有时最短。固有时和在其它参考系中测得的时间的关系,如果用钟走的快慢来说明,就是运动的钟的一秒对应于这静止的同步的钟的好几秒。这个效应叫运动的钟时间延缓。 尺子静止时测得的长度叫它的固有长度,固有长度是最长的。在相对于其运动的参考系中测量其长度要收缩。这个效应叫尺缩效应。 狭义相对论的时间和空间概念与牛顿力学的有何不同 有何联系 答:牛顿力学的时间和空间概念即绝对时空观的基本出发点是:任何过程所经历的时间不因参考系而差异;任何物体的长度测量不因参考系而不同。狭义相对论认为时间测量和空间测量都是相对的,并且二者的测量互相不能分离而成为一个整体。 牛顿力学的绝对时空观是相对论时间和空间概念在低速世界的特例,是狭义相对论在低速情况下忽略相对论效应的很好近似。 能把一个粒子加速到光速c 吗为什么 答:真空中光速C 是一切物体运动的极限速度,不可能把一个粒子加速到光速C 。从质速关系可看到,当速度趋近光速C 时,质量趋近于无穷。粒子的能量为2 mc ,在实验室中不存在这无穷大的能量。 什么叫质量亏损 它和原子能的释放有何关系 答:粒子反应中,反应前后如存在粒子总的静质量的减少0m ?,则0m ?叫质量亏损。原子能的释放指核反应中所释 放的能量,是反应前后粒子总动能的增量k E ?,它可通过质量亏损算出20k E m c ?=?。 在相对论的时空观中,以下的判断哪一个是对的 ( C ) (A )在一个惯性系中,两个同时的事件,在另一个惯性系中一定不同时; 1. 已知某一时期内某商品的需求函数为Q =50-5P ,供给函数为Qs=-10+5p。(1)求均衡价格Pe和均衡数量Qe,并作出几何图形。 (2)假定供给函数不变,由于消费者收入水平提高,使需求函数变为Qd=60-5P。求出相应的均衡价格Pe 和均衡数量Qe ,并作出几何图形。(3)假定需求函数不变,由于生产技术水平提高,使供给函数变为Qs=-5+5p。 求出相应的均衡价格Pe 和均衡数量Qe ,并作出几何图形。 (4)利用(1)(2 )(3),说明静态分析和比较静态分析的联系和区别。(5)利用(1)(2 )(3),说明需求变动和供给变动对均衡价格和均衡数量的影响. 解答: (1)将需求函数Qd = 50-5P和供给函数Qs =-10+5P 代入均衡条件Qd = Qs ,有: 50- 5P= -10+5P 得: Pe=6 以均衡价格Pe =6 代入需求函数Qd =50-5p ,得: Qe=20 所以,均衡价格和均衡数量分别为Pe =6 , Qe=20 (图略) (2)将由于消费者收入提高而产生的需求函数Qd=60-5p 和原供给函数 Qs=-10+5P, 代入均衡条件Q d= Qs ,有: 60-5P=-10+5P 得Pe=7 以均衡价格Pe=7代入Qd方程,得Qe=25 所以,均衡价格和均衡数量分别为Pe =7 , Qe=25 (图略) (3) 将原需求函数Qd =50-5p和由于技术水平提高而产生的供给函数Q =-5+5p , 代入均衡条件Qd =Qe ,有: 50-5P=-5+5P得Pe= 5.5 以均衡价格Pe= 5.5 代入Qd =50-5p ,得22.5 所以,均衡价格和均衡数量分别为Pe=5.5 Qe=22.5 (4)所谓静态分析是考察在既定条件下某一经济事物在经济变量的相互作用下所实现的均衡状态及其特征.也可以说,静态分析是在一个经济模型中根据所给的外生变量来求内生变量的一种分析方法.以(1)为例,在图中,均衡点 E 就是一个体现了静态分析特征的点.它是在给定的供求力量的相互作用下所达到的一个均衡点.在此,给定的供求力量分别用给定的供给函数Q=-10+5P 和需求函数Q=50-5P表示,均衡点具有的特征是:均衡价格P=6 且当P =6 时,有Q= Q d= Qe =20 ,同时, 理论力学课后习题第二章思考题解答 2.1.答:因均匀物体质量密度处处相等,规则形体的几何中心即为质心,故先找出各规则形体的质心把它们看作质点组,然后求质点组的质心即为整个物体的质心。对被割去的部分,先假定它存在,后以其负质量代入质心公式即可。 2.2.答:物体具有三个对称面已足以确定该物体的规则性,该三平面的交点即为该物体的几何对称中心,又该物体是均匀的,故此点即为质心的位置。 2.3.答:对几个质点组成的质点组,理论上可以求每一质点的运动情况,但由于每一质点受到周围其它各质点的相互作用力都是相互关联的,往往其作用力难以 n3 预先知道;再者,每一质点可列出三个二阶运动微分方程,各个质点组有个相互关联的三个二阶微分方程组,难以解算。但对于二质点组成的质点组,每一质点的运动还是可以解算的。 若质点组不受外力作用,由于每一质点都受到组内其它各质点的作用力,每一质点的合内力不一定等于零,故不能保持静止或匀速直线运动状态。这表明,内力不改变质点组整体的运动,但可改变组内质点间的运动。 2.4.答:把碰撞的二球看作质点组,由于碰撞内力远大于外力,故可以认为外力为零,碰撞前后系统的动量守恒。如果只考虑任一球,碰撞过程中受到另一球的碰撞冲力的作用,动量发生改变。 2.5.答:不矛盾。因人和船组成的系统在人行走前后受到的合外力为零(忽略水对船的阻力),且开船时系统质心的初速度也为零,故人行走前后系统质心相对地面的位置不变。当人向船尾移动时,系统的质量分布改变,质心位置后移,为抵消这种改变,船将向前移动,这是符合质心运动定理的。 2.6.答:碰撞过程中不计外力,碰撞内力不改变系统的总动量,但碰撞内力很大, 第二章 一元线性回归分析 思考与练习参考答案 2.1 一元线性回归有哪些基本假定? 答: 假设1、解释变量X 是确定性变量,Y 是随机变量; 假设2、随机误差项ε具有零均值、同方差和不序列相关性: E(εi )=0 i=1,2, …,n Var (εi )=σ2 i=1,2, …,n Cov(εi, εj )=0 i≠j i,j= 1,2, …,n 假设3、随机误差项ε与解释变量X 之间不相关: Cov(X i , εi )=0 i=1,2, …,n 假设4、ε服从零均值、同方差、零协方差的正态分布 εi ~N(0, σ2 ) i=1,2, …,n 2.2 考虑过原点的线性回归模型 Y i =β1X i +εi i=1,2, …,n 误差εi (i=1,2, …,n )仍满足基本假定。求β1的最小二乘估计 解: 得: 2.3 证明(2.27式),∑e i =0 ,∑e i X i =0 。 证明: 其中: ∑∑+-=-=n i i i n i X Y Y Y Q 1 2102 1 ))??(()?(ββ211 1 2 )?()?(i n i i n i i i e X Y Y Y Q β∑∑==-=-= 01????i i i i i Y X e Y Y ββ=+=- 即: ∑e i =0 ,∑e i X i =0 2.4回归方程E (Y )=β0+β1X 的参数β0,β1的最小二乘估计与最大似然估计在什 么条件下等价?给出证明。 答:由于εi ~N(0, σ2 ) i=1,2, …,n 所以Y i =β0 + β1X i + εi ~N (β0+β1X i , σ2 ) 最大似然函数: 使得Ln (L )最大的0 ?β,1?β就是β0,β1的最大似然估计值。 同时发现使得Ln (L )最大就是使得下式最小, 上式恰好就是最小二乘估计的目标函数相同。值得注意的是:最大似然估计是在εi ~N (0, σ2 )的假设下求得,最小二乘估计则不要求分布假设。 所以在εi ~N(0, σ2 ) 的条件下, 参数β0,β1的最小二乘估计与最大似然估计等价。 ∑∑+-=-=n i i i n i X Y Y Y Q 1 2102 1 ))??(()?(ββ0 1 00??Q Q β β ??==? ? 理论力学课后习题第二章解答 2.1 解 均匀扇形薄片,取对称轴为轴,由对称性可知质心一定在轴上。 有质心公式 设均匀扇形薄片密度为,任意取一小面元, 又因为 所以 对于半圆片的质心,即代入,有 2.2 解 建立如图2.2.1图所示的球坐标系 x x 题2.1.1图 ? ?=dm xdm x c ρdS dr rd dS dm θρρ==θcos r x =θθθρθρsin 32a dr rd dr rd x dm xdm x c ===?? ????2 π θ= πππ θθa a a x c 342 2sin 32sin 32=?== 把球帽看成垂直于轴的所切层面的叠加(图中阴影部分所示)。设均匀球体的密度为。 则 由对称性可知,此球帽的质心一定在轴上。 代入质心计算公式,即 2.3 解 建立如题2. 3.1图所示的直角坐标,原来与共同作一个斜抛运动。 当达到最高点人把物体水皮抛出后,人的速度改变,设为,此人即以 的速度作平抛运动。由此可知,两次运动过程中,在达到最高点时两次运动的水平距离是一致的(因为两次运动水平方向上均以作匀速直线运动,运动的时间也相同)。所以我们只要比较人把物抛出后水平距离的变化即可。第一次运动:从最高点运动到落地,水平距离 题2.2.1图 z ρ)(222z a dz y dv dm -===ρπρπρz )2()(432 b a b a dm zdm z c ++-==? ?人 W y 题2.3.1图 x v x v αcos v 0=水平v 1s ① ② ③ 第二次运动:在最高点人抛出物体,水平方向上不受外力,水平方向上动量守恒,有 可知道 水平距离 跳的距离增加了 = 2.4解 建立如图2.4.1图所示的水平坐标。 以,为系统研究,水平方向上系统不受外力,动量守恒,有 ① 对分析;因为 ② 在劈上下滑,以为参照物,则受到一个惯性力(方向与加速度方向相反)。如图2.4.2图所示。所以相对下滑。由牛顿第二定律有 t a v s ?=cos 01gt v =αsin 0ααcos sin 20 1g v s =)(cos )(0u v w Wv v w W x x -+=+αu w W w a v v x ++ =cos 0αααsin )(cos sin 0202uv g W w w g v t v s x ++==12s s s -=?αsin )(0uv g w W w + 题2.4.1图 θ题2.4.2图 1m 2m 02211=+x m x m 1m 相对绝a a a +=1m 2m 2m 1m 21x m F -=惯2m 1m 2m 第2章课外练习参考答案 一、判断题 1.窗体是一个容器,可以容纳其它控件,但窗体不能像控件一样接收事件( ×)。 2.界面对象的Top、Left属性,是指对象左上角相对于上级容器的坐标( √)。 3.设置好窗体字体属性后再向窗体中添加控件,则控件的默认字体属性与窗体相同( √)。 4.对象的属性实质上就是变量( √)。 5.函数Val ("2a")的返回值为2 ( √)。 6.标签对象的Caption属性值为字符串型,运行时可以被重新赋值( √)。 7.使用窗体对象的Cls方法可以清除窗体中标签的Caption(×)。 8.属性、方法和事件都是对象的成员(×)。 9.事件只能由用户的鼠标或键盘动作触发产生(×)。 10.清除文本框的内容可以用文本框的Cls方法(×)。 11.VB的窗体与不同类型的控件都有各自不同的事件集(√)。 12.工程文件的扩展名是. frm(×)。 13.整型变量有Byte、Integer、Long 3种类型(√)。 14.Byte类型的数据,其数值范围在-255~255之间(×)。 15.Double类型数据可以精确表示其数值范围内的所有实数(√)。 16.在逻辑运算符Not、Or、And中,运算优先级由高到低依次为Not、Or、And(×)。 17.关系表达式是用来比较两个数据的大小关系的,结果为逻辑值(√)。 18.一个表达式中若有多种运算,在同一层括号内,计算机按函数运算→逻辑运算→关系运算→算术运算的顺序对表达式求值(×)。 19.赋值语句的功能是,计算出表达式值并转换为相应类型数据后,再为变量或控件的属性赋值(√)。 20.用Dim关键字声明数值型变量时,该数值型变量自动被赋初值为0(√)。 21.若行If语句中逻辑表达式值为True,则关键字Then后的若干语句都要执行(×)。 22.在行If语句中,关键字End If是必不可少的(×)。 23.块If结构中的Else子句可以缺省(√)。 24.使用On Error GoTo语句并编写相应程序,可以捕获程序中的编译错误(×)。 二、选择题 1.Integer类型数据能够表示的最大整数为D。 A、275 B、215-1 C、216 D、216-1 2.货币类型数据小数点后面的有效位数最多只有B。 A、1位 B、6位 C、16位 D、4位 3.输入对话框InputBox的返回值的类型是A。 A、字符串 B、整数 C、浮点数 D、长整数 4.运算符“\”两边的操作数若类型不同,则先C再运算。 A、取整为Byte类型 B、取整为Integer类型 C、四舍五入为整型 D、四舍五入为Byte类型 5.下列程序段的输出结果是B。 a=10: b=10000: x=log(b)/log(a): Print "lg(10000)="; x 2.12 密闭容器,测压管液面高于容器内液面h=1.8m ,液体的密度为850kg/m 3,求液面 压强。 解:P o = P a ,gh = P a 850 9.807 1.8 相对压强为:15.00kPa。 绝对压强为:116.33kPa。 答:液面相对压强为15.00kPa,绝对压强为116.33kPa。 2.13 密闭容器,压力表的示值为4900N/m 2,压力表中心比A点高0.4m , A点在水下 1.5m,,求水面压强。 P0 1.5m 1 0.4m A 解: P0 = P a P -1.1 'g 二P a 4900 -1.1 1000 9.807 二p a「5.888 (kPa) 相对压强为:_5.888kPa。 绝对压强为:95.437kPa。 答: 水面相对压强为-5.888kPa,绝对压强为95.437kPa。 3m 解:(1)总压力:Pz=A p=4「g 3 3 = 353.052 (kN) (2)支反力:R 二W总二W K W箱二W箱;?g 1 1 1 3 3 3 =W箱 9807 28 =274.596 kN W箱 不同之原因:总压力位底面水压力与面积的乘积,为压力体Qg。而支座反力与水体重量及箱体重力相平衡,而水体重量为水的实际体积Eg。 答:水箱底面上总压力是353.052kN,4个支座的支座反力是274.596kN。 2.14 盛满水的容器,顶口装有活塞A,直径d =0.4m,容器底的直径D=1.0m,高h =1.8m ,如活塞上加力2520N (包括活塞自重),求容器底的压强和总压力 解: (1)容器底的压强: P D =P A'gh =252°9807 1.8 =37.706(kPa)(相对压强) /-d2 4 (2)容器底的总压力: P D二Ap D D2 p D12 37.706 10 = 29.614(kN) 4 4 答:容器底的压强为37.706kPa,总压力为29.614kN 。 2.6用多管水银测压计测压,图中标高的单位为m,试求水面的压强P0。 《大气环境化学》重点习题 1.大气中有哪些重要污染物?说明其主要来源和消除途径。 环境中的大气污染物种类很多,若按物理状态可分为气态污染物和颗粒物两大类;若按形成过程则可分为一次污染物和二次污染物。按照化学组成还可以分为含硫化合物、含氮化合物、含碳化合物和含卤素化合物。主要按照化学组成讨论大气中的气态污染物主要来源和消除途径如下: (1)含硫化合物 大气中的含硫化合物主要包括:氧硫化碳(COS)、二硫化碳(CS2)、二甲基硫(CH3)2S、硫化氢(H2S)、二氧化硫(SO2)、三氧化硫(SO3)、硫酸(H2SO4)、亚硫酸盐(MSO3)和硫酸盐(MSO4)等。大气中的SO2(就大城市及其周围地区来说)主要来源于含硫燃料的燃烧。大气中的SO2约有50%会转化形成H2SO4或SO42-,另外50%可以通过干、湿沉降从大气中消除。H2S主要来自动植物机体的腐烂,即主要由植物机体中的硫酸盐经微生物的厌氧活动还原产生。大气中H2S主要的去除反应为:HO + H2S → H2O + SH。 (2)含氮化合物 大气中存在的含量比较高的氮的氧化物主要包括氧化亚氮(N2O)、一氧化氮(NO)和二氧化氮(NO2)。主要讨论一氧化氮(NO)和二氧化氮(NO2),用通式NO x表示。NO和NO2是大气中主要的含氮污染物,它们的人为来源主要是燃料的燃烧。大气中的NO x最终将转化为硝酸和硝酸盐微粒经湿沉降和干沉降从大气中去除。其中湿沉降是最主要的消除方式。 (3)含碳化合物 大气中含碳化合物主要包括:一氧化碳(CO)、二氧化碳(CO2)以及有机的碳氢化合物(HC)和含氧烃类,如醛、酮、酸等。 CO的天然来源主要包括甲烷的转化、海水中CO的挥发、植物的排放以及森林火灾和农业废弃物焚烧,其中以甲烷的转化最为重要。CO的人为来源主要是在燃料不完全燃烧时产生的。大气中的CO可由以下两种途径去除:土壤吸收(土壤中生活的细菌能将CO代谢为CO2和CH4);与HO自由基反应被氧化为CO2。matlab课后习题解答第二章
《基础会计学》第二章课后习题及参考答案
微观经济学第二章课后练习答案
高数课后习题及答案 第二章 2.3
胡汉才编著《理论力学》课后习题答案第2章力系的简化
第二章课后练习答案
互换性第二章课后习题答案
(完整版)微观经济学第二章课后习题答案
第二章课后习题与答案
定性数据分析第二章课后答案资料
大物第二章课后习题答案
第二章课后习题答案
理论力学课后习题第二章思考题答案
第2章课后习题参考答案
理论力学课后习题第二章解答
第2章习题答案
水力学第二章课后习题答案
环境化学第二章课后答案重点