尼奎斯特图 伯德图

1.比例环节
比例环节的传递函数为
G(s)=K
所以比例环节的频率特性为
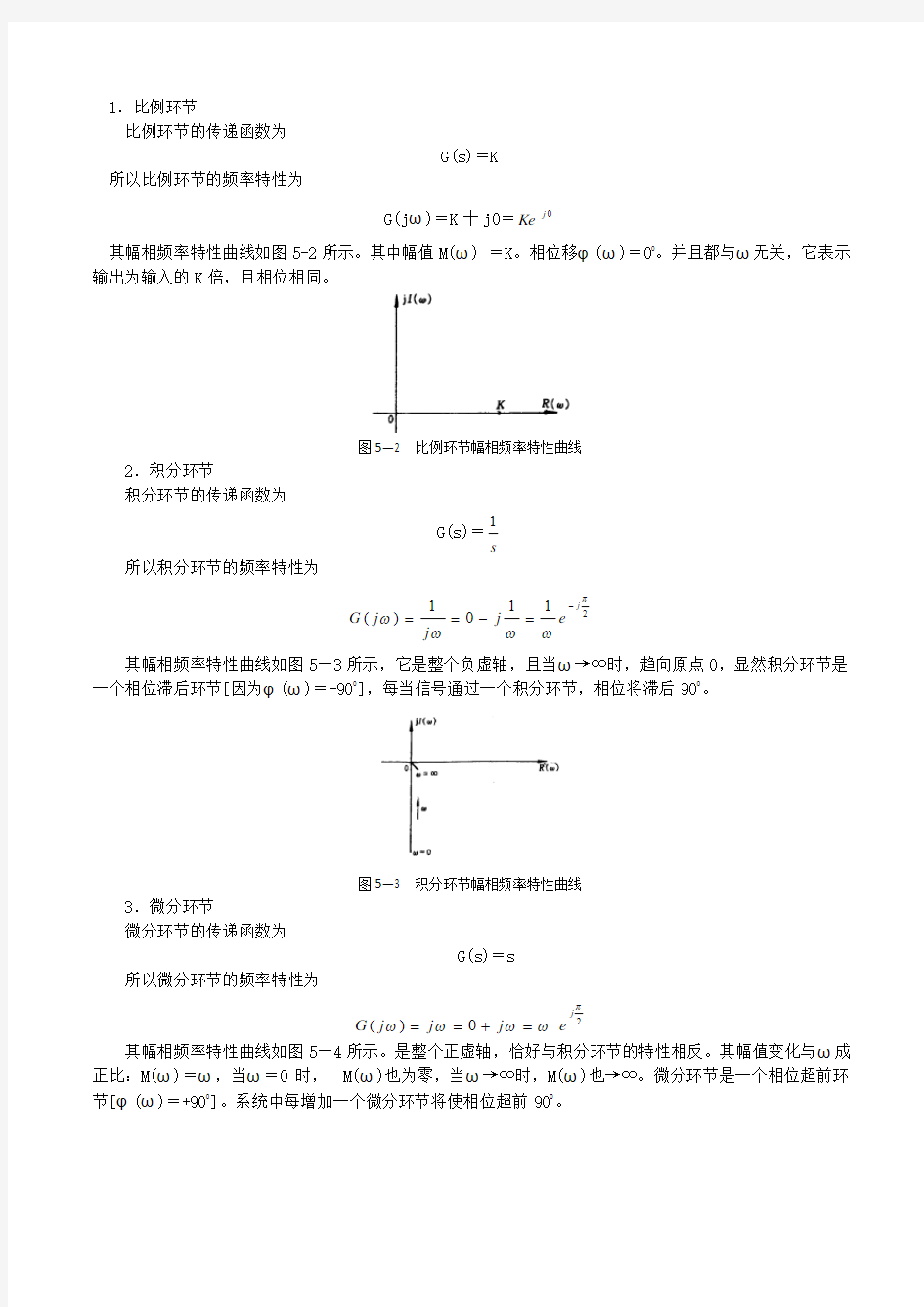
G(j ω)=K 十j0=0
j Ke
其幅相频率特性曲线如图5-2所示。其中幅值M(ω) =K 。相位移φ(ω)=00。并且都与ω无关,它表示输出为输入的K 倍,且相位相同。
图5—2 比例环节幅相频率特性曲线
2.积分环节
积分环节的传递函数为
G(s)=
s
1
所以积分环节的频率特性为
2
1101)(π
ω
ωω
ωj
e
j
j j G -=-==
其幅相频率特性曲线如图5—3所示,它是整个负虚轴,且当ω→∞时,趋向原点0,显然积分环节是一个相位滞后环节[因为φ(ω)=-900],每当信号通过一个积分环节,相位将滞后900。
图5—3 积分环节幅相频率特性曲线
3.微分环节
微分环节的传递函数为
G(s)=s
所以微分环节的频率特性为
2
0)(π
ωωωωj
e
j j j G =+==
其幅相频率特性曲线如图5—4所示。是整个正虚轴,恰好与积分环节的特性相反。其幅值变化与ω成正比:M(ω)=ω,当ω=0时, M(ω)也为零,当ω→∞时,M(ω)也→∞。微分环节是一个相位超前环节[φ(ω)=+900]。系统中每增加一个微分环节将使相位超前900。
图5-4 微分环节幅相频率特性曲线
4.一阶惯性环节
一阶惯性环节的传递函数为
1
1)(+=
Ts s G
所以一阶惯性环节的频率特性为
2
2
2
2
11111)(ω
ωω
ω
ωT T j
T jT j G +-+=
+=
幅频特性和相频特性为
ω
ωφω
ωT tg T M 1
2
2
)(11)(--=+=
由式(5—16)直接可得实频特性和虚频特性为
2
2
2
2
1)(11)(ω
ωωω
ωT T I T R +-
=+=
并满足下面的圆的方程
2
2
2
21)(21)(??
? ??=+??????-ωωI R 圆心为??
?
??0,21
,半径为21。
当ω从0→∞时,M(ω)从l →0;φ(ω)从00→-900,因此,一阶惯性环节的频率特性位于直角坐标图的第四象限,且为一半圆,如图5—5所示。
一阶惯性环节是一个相位滞后环节,其最大滞后相角为900
。一阶惯性环节可视为一个低通滤波器,因为频率ω越高,则M(ω)越小,当ω>
T
5时,幅值M(ω)已趋近于零。
图5—5 惯性环节幅相频率特性曲线
5.二阶振荡环节
二阶振荡环节的传递函数为
1
21
)(2
2
++=
Ts s T s G ξ (o <ξ<1)
二阶振荡环节的频率特性为
2
2
2
2
2
22
2
2
2
2
2
)
2()1(2)
2()1(11)(2)(1
)(ωξωω
ξωξωω
ωξωωT T T j
T T T j T j T j G +--+--=
++=
相应的幅频特性和相频特性为
2
2
1
2
2
2
12)(2()1(1
)(ω
ωξωφωξωωT T tg
)
T T M 2
--=+-=
-
据上述表达式可以绘得二阶振荡环节频率特性的幅相频率特性曲线如图5-6所示。由式(5—18)及图5-6可知,当ω=0时,M(ω)=1,φ(ω)=00;在0<ξ<1的欠阻尼情况下,当ω=
T
1时,
90)(,21)(-==ωφξ
ωM ,频率特性曲线与负虚轴相交,相交处的频率为无阻尼自然振荡频率ω=
T
1=
n ω。当ω→∞时,M(ω)→0,φ(ω) →1800。频率特性曲线与实轴相切。
图5—6 二阶振荡环节幅相频率特性曲线
图5—6的曲线族表明,二阶振荡环节的频率特性和阻尼比ξ有关,ξ大时,幅值M(ω)变化小;ξ小时,M(ω)变化大。此外,对于不同的ξ值的特性曲线都有一个最大幅值r M 存在,这个r M 被称为谐振峰值,对应的频率ωr 称为谐振频率。
当ξ>1时,幅相频率特性将近似为一个半圆。这是因为在过阻尼系统中,特征根全部为负实数,且其中一个根比另一个根小得多。所以当ξ值足够大时,数值大的特征根对动态响应的影响很小,因此这时的二阶振荡环节可以近似为一阶惯性环节。 6.延迟环节
延迟环节的传递函数为
()s
G s e
τ-=
其频率特性为
τω
ωj e
j G -=)( (5-19)
相应的幅频特性和相频特性为
ω
τωφω M -==)(1
)(
图5—7 延迟环节频率特性极坐标图
当频率ω从0→∞变化时,延迟环节频率特性极坐标图如图5-7所示,它是一个半径为1,以原点为圆心的一个圆。也即ω从0→∞变化时,幅值M(ω)总是等于l ,相角φ(ω)与ω成比例变化,当ω→∞时,φ(ω) →-∞。
典型环节频率特性的伯德图
1. 比例环节
比例环节频率特性为,K j G =)(ω
显然,它与频率无关,其对数幅频特性和对数相频特性分别为
)(lg 20)(==ω?ωK
L
2. 微分环节ωj
微分环节ωj 的对数幅频与对数相频特性为
90
)(lg 20)(==ω?ω
ωL
对数幅频曲线在1=ω处通过dB 0线,斜率为dec dB /20; 对数相频特性为 90+直线。
3. 积分环节ωj 1
积分环节ω
j 1的对数幅频特性与对数相频特性为
90
)(lg 20)(-=-=ω?ω
ωL
积分环节对数幅频曲线在1=ω处通过dB 0线,斜率为dec dB /20-;对数相频特性为 90-直线。
4. 惯性环节1
)1(-+ωj
惯性环节1
)1(-+T j ω的对数幅频与对数相频特性表达式为
2
1
1lg
20)(???
?
??+-=ω
ωωL 1
arctan
)(ωωω?-= (5-28b )
式中:1
1;1ωωωω=
=
T T
。
当1ωω<<时,略去式(5-28a )根号中的2
1)(ωω项,则有dB L 01lg 20)(=-≈ω,表明)(ωL 的低频渐近线是dB 0水平线。
当1ωω>>时,略去式(5-28a )根号中的1项,则有)lg(20)(1ωωω-=L ,表明)(ωL 高频部分的渐近线是斜率为dec dB /20-的直线,两条渐近线的交点频率11=ω称为转折频率。
5. 一阶复合微分环节 ωj 1+
一阶复合微分环节的对数幅频与对数相频特性表达式为
2
11lg
20)(???
? ??+=ω
ωωL 1
arctan
)(ωωω?=
一阶复合微分环节的Bode 图如图5-14②所示,它与惯性环节的Bode 图关于频率轴对称。
6. 二阶振荡环节 [
]
1
2)(21-++T j Tj ωωξ
振荡环节的频率特性
)
(
2)(
11
)(2
n
n
j j G ωωξωωω+-=
T
n 1=
ω其中, 10<<ξ。
对数幅频特性
22
2)2()(1lg
20)(n
n L ωωξωωω+?
????
?--= 对数相频特性
2
)
(12arctan
)(n n ωωωξωω?--=
当
1< ωω时,略去式(5-48a )中的2 )( n ωω和n ωωξ 2项,则有 dB L 01lg 20)(=-≈ω 表明)(ωL 的低频段渐近线是一条dB 0的水平线。 当 1>>n ωω时,略去式(5-29a)中的1和n ωωξ 2项,则有 n n L ωωωωωlg 40)lg( 20)(2 -=-= 表明)(ωL 的高频段渐近线是一条斜率为dB 40-的直线。 7. 二阶复合微分环节 2 )j (j 21T T ωωξ++ 二阶复合微分环节的频率特性 T j j G n n n 1) ( 2)( 1)(2 = +-=ωωωξωωω其中, 10<<ξ 对数幅频特性: 22 2)2()(1lg 20)(n n L ωωξωωω+? ???? ?-= 对数相频特性: 2 ) (12a r c t a n )(n n ωωξωω?-= 二阶复合微分环节与振荡环节成倒数关系,其Bode 图与振荡环节Bode 图关于频率轴对称。 8. 延迟环节 延迟环节的频率特性 ) ()()(ω?τω ωωj j e A e j G ==- 式中 τωω?ω-==)(,1)(A 因此 0)(lg 20)(==ωωj G L (5-30a ) τωω?-=)( (5-30b ) 上式表明,延迟环节的对数幅频特性与dB 0线重合,对数相频特性值与ω成正比,当∞→ω时,相角迟后量也∞→。延迟环节的Bode 图 开环控制系统与闭环控制系统方框图几例(仅供参考) 1.普通机械式电饭煲简单的工作过程如下:接通电源,拨动杠杆按钮,给出做饭指令,磁钢吸合,拉住与之相连的杠杆,杠杆拨动微动开关,微动开关在杠杆的按压下接通加热回路,磁钢铝壳帽与锅底接触,开始加热。当饭熟时(不再有水的沸腾),锅底温度升高,磁钢温度达到150℃时失去磁性,在弹簧力作用下,杠杆下移,微动开关恢复常态,结束加热状态。此时电源仍是接通状态,由于双金属片温控器的作用,电饭煲进入保温状态(70度以下),这就是电饭煲接通电源后即使不按键也能得到温水的原因。但不按下杠杆按键则煮不熟饭。 由上面的工作过程可知,普通电饭煲虽然简单,但其控制过程还是比较复杂的。其工作流程为:给出“做饭”指令——进入加热状态——判断是否达到150度,没有达到,继续加热,如果达到,则进入保温状态。从这个流程知道,电饭煲的控制,从总体上说,仍是一个开环控制。因为,输入一个“做饭”指令,输出的就是“做饭”状态。如果输入的是“温水”指令,则输出的状态就是“温水”状态。即输入量和输出量是一一对应的。但是,其局部环节还有反馈。其参考方块图如下: 3.宾馆、酒店的“自动叫醒服务系统”是一个开环控制系统。 参考框图如下: 4.家用缝纫机的缝纫速度控制系统 缝纫机“转速控制系统”的控制对象应该是“缝纫机”不应该是“机针”。对缝纫机来说,还有其它控制系统,如“针距控制系统”、“倒车控制系统”等,这些系统的控制对象都是缝纫机。参考框图如下: 注:有些学生会认为这个控制系统是一个闭环控制系统,理由是人可以不断调整缝纫的转速。其实这种理解是错误的。它不是闭环的原因是:第一,它输入的转速不是恒定的,没法与输出转速进行比较。第二,“人”作为操作者,对控制系统施加控制指令的行为,不能视为“人作为某个环节参与了控制系统”。 5.走道路灯的声光控制系统 声光自动控制白炽灯开关的基本工作原理如下:白天或夜晚光线较亮时,光控部分将开关自动关断,声控部分不起作用。当光线较暗时,光控部分将开关自动打开,负载电路的通断受控于声控部分。电路是否接通,取决于声音信号强度。当声强达到一定程度时,电路自动接通,点亮白炽灯,并开始延时,延时时间到,开关自动关断,等待下一次声音信号触发。这样,通过对环境声光信号的检测与处理,完成电路通断的自动开关控制。其声控部分的参考框图如下: 6.交通路口红绿灯自动控制(根据车流量大小改变红绿灯时间)系统 目前所用的交通路口的红绿灯控制系统一般都是按给定的时序来控制的,因此应该是开环控制系统,而不是闭环。对车流量因素的考虑,是在调查统计的基础上在设计给定时序时体现的。其参考框图如下: 当然有一点在注意,红绿灯的时间并不能完全靠车流量的多少来控制。对单个交叉口而言,当交通需求较小时,信号周期则应短一些,但一般不能少15秒,以免某一方向的绿灯时间小于15秒使车辆来不及通过路口影响交通安全;当交通需求较大时,信号周期则应长一些,但一般不能超过120秒,否则某一方向的红灯时间将超过60秒,驾驶员心理上不能忍受。当交通需求很小时,一般按最 Matlab中Bode图的绘制技巧 我们经常会遇到使用Matlab画伯德图的情况,可能我们我们都知道bode这个函数是用来画bode图的,这个函数是Matlab内部提供的一个函数,我们可以很方便的用它来画伯德图,但是对于初学者来说,可能用起来就没有那么方便了。 譬如我们要画出下面这个传递函数的伯德图: 1.576e010 s^2 H(s= ------------------------------------------------------------------------------------------ s^4 + 1.775e005 s^3 + 1.579e010 s^2 + 2.804e012 s + 2.494e014 (这是一个用butter函数产生的2阶的,频率范围为[20 20K]HZ的带通滤波器。 我们可以用下面的语句: num=[1.576e010 0 0]; den=[1 1.775e005 1.579e010 2.804e012 2.494e014]; H=tf(num,den; bode(H 这样,我们就可以得到以下的伯德图: 可能我们会对这个图很不满意,第一,它的横坐标是rad/s,而我们一般希望横坐标是HZ;第二,横坐标的范围让我们看起来很不爽;第三,网格没有打开(这点当然我们可以通过在后面加上grid on解决)。 下面,我们来看看如何定制我们自己的伯德图风格: 在命令窗口中输入:bodeoptions 我们可以看到以下内容:ans = Title: [1x1 struct] XLabel: [1x1 struct] YLabel: [1x1 struct] TickLabel: [1x1 struct] Grid: 'off' XLim: {[1 10]} XLimMode: {'auto'} YLim: {[1 10]} YLimMode: {'auto'} IOGrouping: 'none' InputLabels: [1x1 struct] OutputLabels: [1x1 struct] InputVisible: {'on'} OutputVisible: {'on'} FreqUnits: 'rad/sec' FreqScale: 'log' MagUnits: 'dB' MagScale: 'linear' MagVisible: 'on' MagLowerLimMode: 'auto' MagLowerLim: 0 PhaseUnits: 'deg' PhaseVisible: 'on' PhaseWrapping: 'off' 控制系统的开环频率特性 目的:掌握开环Bode 图的绘制 根据Bode 图确定最小相位系统的传递函数 重点:开环Bode 图的绘制、根据Bode 图确定最小相位系统的传递函数 1 开环伯德图手工作图的一般步骤: 1)将开环传递函数表示为时间常数表达形式,计算各个典型环节的交接频率 2)求20lgK 的值,并明确积分环节的个数ν 3)通过(1,20lgK )绘制斜率为-20vdB/dec 低频段 4)随着频率增加,每遇到一个典型环节的交接频率,就改变一次斜率 最小相位系统定义: 递函数的零点、极点全部位于S 左半平面,同时又无纯滞后环节的系统称为最小相位系统。否则就是非最小相位系统。 对数幅频特性与相频特性之间存在确定的对应关系。对于一个最小相位系统,我们若知道了其幅频特性,它的相频特性也就唯一地确定了。也就是说:只要知道其幅频特性,就能写出此最小相位系统所对应的传递函数,而无需再画出相频特性。 非最小相位系统高频时相角迟后大,起动性能差,响应缓慢。对响应要求快的系统,不宜采用非最小相位元件。 2 典型环节的伯德图 绘制曲线在MA TLAB 中实现,利用下述的程序段: num=[b2 b1 b0]; den=[1 a2 a1 a0]; H=tf(num,den); bode(H) margin(H) hold on 2.1 比例环节 传递函数:()G s K = 频率特性:()G j K ω= 对数幅频特性:()20lg L j K ω= 对数相频特性:()0?ω= 程序段: num=[0 10]; den=[0 1]; H=tf(num,den); bode(H) margin(H) hold on 结论:放大环节的对数幅频特性是一条幅值为20lgK 分贝,且平行于横轴的直线,相频特性是一条和横轴重合的直线。 K>1时,20lgK>0dB ;K<1时,20lgK<0dB 。 2.2 惯性环节(低通滤波特性) 传递函数:1()1G s s τ= + 频率特性:()()()j G j A e ?ωωω= 对数幅频特性:2 1()20lg 1() L ωτω=+ 对数相频特性:()arctan ?ωτω=- 绘制1()10.1G s s =+的Bode 图 程序段: num=[0 1]; den=[0.1 1];H=tf(num,den); bode(H) margin(H) hold on 结论:惯性环节的对数幅频特性可以用在1ωτ= 处相交于0分贝的两条渐近直线来近似表示:当1ωτ 时,是一条0分贝的直线; 当1ωτ 时,是一条斜率为-20dB/dec 的直线。 惯性环节具有低通特性,对低频输入能精确地复现,而对高频输入要衰减,且产生相位迟后。因此,它只能复现定常或缓慢变化的信号。 2.3 积分环节 传递函数:1 ()G s s τ= 频率特性:()()()j G j A e ?ωωω= 对数幅频特性:1 ()20lg L j ωτω = 对数相频特性:()2 π?ω=- 在同一坐标中绘制1()G s s = 、1()0.1G s s = 和 1()0.01G s s = 的Bode 图 num1=[0 1];den1=[1 1];H1=tf(num1,den1); bode(H1)margin(H1)hold on 常见开环控制系统方框图 开环控制系统:控制系统的输出量不对系统的控制产生任何影响。 开环控制系统特征:系统的输出量仅受输入量控制,输入,量到输出量之间的信号是单向传递。 开环控制系统的方框图: 输入量——控制系统的给定量; 输出量——控制系统所要控制的量; 控制器——对输入信号进行处理并发出控制命令的装置或元件; 执行器——直接对被控对象进行控制的装置或元件; 被控对象——控制系统所要控制的装置或生产过程。 控制量——执行器的输出信号,一般是影响被控量变化的因素;(输出量≠控制量,输出量=被控量) 1.自动门的控制系统 自动门工作过程: (1)当有人到达门前某一距离时,传感器感知,并发出“有人”的信号 (2)控制器接到传感器传来的信号后,经变换放大后传给电动机(这里的电动机叫做执行器,也称为驱动器); (3 )电动机根据传来的开门信号转动,门被打开(这里的门叫做被控制对象,也称为控制对 输入量 控制器 执行器 被控对象 输出量 (被控量) 控制量 象,简称对象) (4)控制器保持开门信号延迟后,自动发出关门信号,电动机反转,门重新关闭。自动门控制系统的方框图: 2.水泵抽水控制系统: 3.家用窗帘自动控制系统 人体 热辐射信号控制 电路 电机自动门 门的开 或关 转动 输入量 控制器执行器被控对象 输出量 控制量 输入量(接通电源) 控制器 (控制电路) 执行器 (水泵) 被控对象 (水管) 输出量 (水管排出水) 水流量 4.楼道自动声控灯装置 5.游泳池定时注水控制系统 6.十字路口的红绿灯定时控制系统 (输入量) 天亮或暗的光信号 控制器 (控制电路) 执行器 (电动机) 被控对象 (窗帘) 输出量 (窗帘开或闭) 控制量(转动) 输入量 (有无声光信号) 控制器 (控制电路) 执行器 (触点延迟开关) 被控对象 (楼道灯) 输出量 (灯亮或灭)控制量(电流) 输入量 (设定注水的时间) 控制器 (定时器) 执行器 (进水门阀) 被控对象 (游泳池) 输出量 (游泳池的水位) 控制量(水流量) 开环控制系统与闭环控制系统的区别及相关的实例 开环控制系统:不将控制的结果反馈回来影响当前控制的系统 举例:打开灯的开关——按下开关后的一瞬间,控制活动已经结束,灯是否亮起以对按开关的这个活动没有影响; 闭环控制系统:可以将控制的结果反馈回来与希望值比较,并根据它们的误差调整控制作用的系统 举例:调节水龙头——首先在头脑中对水流有一个期望的流量,水龙头打开后由眼睛观察现有的流量大小与期望值进行比较,并不断的用手进行调节形成一个反馈闭环控制;骑自行车——同理不断的修正行进的方向与速度形成闭环控制 开环闭环的区别:1、有无反馈;2、是否对当前控制起作用。开环控制一般是在瞬间就完成的控制活动,闭环控制一定会持续一定的时间,可以借此判断。 手动控制系统:必须在人的直接干预下才能完成控制任务的系统 自动控制系统:不需要有人干预就可按照期望规律或预定程序运行的控制系统 判断:骑自行车——人工闭环系统,导弹——自动闭环系统,人打开灯——人工开环系统,自动门、自动路灯——自动开环系统 开环控制系统方框图19例 开环控制系统的方框图: 1、水泵抽水控制系统 2、家用窗帘自动控制系统 3、宾馆自动门控制系统 控制量 控制量 控制量 4、楼道自动声控灯装置 5、游泳池定时注水控制系统 6、十字路口的红绿灯定时控制系统 8、自动升旗控制系统 9、宾馆火灾自动报警系统 控制量 控制量 控制量 控制量 控制量 控制量 10、宾馆自动叫醒服务系统 11、活动猴控制系统 13、家用缝纫机缝纫速度控制系统 14、普通电风扇控制系统 15、普通全自动洗衣机控制系统 16、手电筒控制装置 控制量 控制量 控制量 控制量 控制量 控制量 电机定位系统校正(BODE图) MATLAB软件具有强大的计算能力和绘图功能,能够快速、准确地做出频域特性曲线。利用MATLAB^制系统的Bode图,为控制系统设计和分析提供了极大的方便。 1.创建M-file文挡,并输入如下程序,运行后生成LTI对象my_sys: J=3.2284e-6; b=3.5077e-6; K=0.0274; R=4; L=2.75e-6; num=[0 0 0 K]; den=[(J*K) (J*R+(L*b)) ((b*R)+O2) 0]; my_sys=tf( nu m,de n); 打开Matlab7.0软件,并新建一个空文档,将程序复制到文档内,如图1所示: 图1 2.运行程序并保存运行结果。如图2所示: 图2 图4 3. 打开 Start-Toolboxes — Control System — SISO Design Tool 启动SISO Design,如图3所示 4. 将my_sys 程序导入到SISO Design Tool 中, 如图4所示 啪号TW Hi^vicn Toni P il ■ ErLE ? Vi, mr r za-ipMi-i k t Dqri £x> al > 1* E □'l'l. ?冷日■丁 11*』]1卜 l>] X o 4 T 11; ?M s K 1 m i 4||'=4Dp 山 watL a ft — 15-S-IQ Jt 午肌 "■存 -i-s — 15-5-in 上午恥 ny_2F2 c !x| F L 1? Edu I 上LIM tmp viiK?l&rl 姿kl 尸L C. Tadul llaJp II H n y. L R ann 曲 闻 出田画田田刚 Dur r ■n.l 卫a r nry CtiaiTijinfl Hi ?f -15-5-JQ 上牛奔 ■■■jip.syg G ii — 15-5-10 上午和 i SB (TT = EJS > 尺jgtrt.Hci nr ||T ^ nkm 1rn mfi B * njrtlini £>■ |si90 ?ui. fi 1 v f Ja S D .EM 1 色 ■'i -Fi'Mii ^mpp+if-slnr Ci|r TBH.*: n i. B-Bf I arv ^(Bft-olKl fir tiv? for “偷史 俺±&n )埔1口 曲 riw^uefCf rijSr.1 4 fftcrt 常见开环控制系统方框图:控制系统的输出量不对系统的控制产生任何影 响。开环控制系统系统的输出量仅受输入量控制,输入,量到输出量之间的信号是单向传开环控制系统特征:递。开环控制系统的方框图:控制量输入量 输出量控制器执行 器被控对象(给定量)(被控量) 输入量——控制系统的给定量;输出量——控制系统所要控制的量;控制器——对输入信号进行处理并发出控制命令的装置或元件;执行器——直接对被控对象进行控制的装置或元件;被控对象——控制系统所要控制的装置或生产过程。输出量=(输出量≠控制量,控制量——执行器的输出信号,一般是影响被控量变化的因素;被控量) 1.自动门的控制系统 自动门工作过程:)当有人到达门前某一距离时,传感器感知,并发出“有人”的信号(1(这里的电动机叫做执行器,经变换放大后传给电动机(2)控制器接到传感器传来的信号后,;也称为驱动器))电动机根据传来的开门信号转动,门被打开(这里的门叫做被控制对象,也称为控制对3(象,简称对象))控制器保持开门信号延迟后,自动发出关门信号,电动机反转,门重新关闭。(4 自动门控制系统的方框图: 控制量 转动控制人体门的开电机自动门电路热辐射信号或关 输出量被控对象输入量执行器控制器 2.水泵抽水控制系统: 水流量 控制器执行器输入量输出量被控对象 (控制电路)(水泵)(接通电源)(水管排出水)(水管) 3.家用窗帘自动控制系统 4.楼道自动声控灯装置 6.十字路口的红绿灯定时控制系统 7.公园音乐喷泉自动控制系统 8.自动升旗控制系统 9.宾馆火灾自动报警系统 10.宾馆自动叫醒服务系统 公共汽车车门开关控制系统11. Matlab中Bode图的绘制技巧学术收藏2010-06-04 21:21:48 阅读54 评论0 字号:大中小订阅我们经常会遇到使用Matlab画伯德图的情况,可能我们我们都知道bode这个函数是用来画bode图的,这个函数是Matlab内部提供的一个函数,我们可以很方便的用它来画伯德图,但是对于初学者来说,可能用起来就没有那么方便了。譬如我们要画出下面这个传递函数的伯德图: 1.576e010 s^2 H(s= ------------------------------------------------------------------------------------------ s^4 + 1.775e005 s^3 + 1.579e010 s^2 + 2.804e012 s + 2.494e014 (这是一个用butter函数产生的2阶的,频率范围为[20 20K]HZ的带通滤波器。我们可以用下面的语句:num=[1.576e010 0 0]; den=[1 1.775e005 1.579e010 2.804e012 2.494e014]; H=tf(num,den; bode(H 这样,我们就可以得到以下的伯德图: 可能我们会对这个图很不满意,第一,它的横坐标是rad/s,而我们一般希望横坐标是HZ;第二,横坐标的范围让我们看起来很不爽;第三,网格没有打开(这点当然我们可以通过在后面加上grid on解决)。下面,我们来看看如何定制我们自己的伯德图风格:在命令窗口中输入:bodeoptions 我们可以看到以下 内容:ans = Title: [1x1 struct] XLabel: [1x1 struct] YLabel: [1x1 struct]TickLabel: [1x1 struct]Grid: 'off' XLim: {[1 10]}XLimMode: {'auto'}YLim: {[1 10]} YLimMode: {'auto'}IOGrouping: 'none'InputLabels: [1x1 struct]OutputLabels: [1x1 struct]InputVisible: {'on'} OutputVisible: {'on'}FreqUnits: 'rad/sec'FreqScale: 'log' MagUnits: 'dB' MagScale: 'linear'MagVisible: 'on' MagLowerLimMode: 'auto'MagLowerLim: 0PhaseUnits: 'deg'PhaseVisible: 'on'PhaseWrapping: 'off' PhaseMatching: 'off'PhaseMatchingFreq: 0 PhaseMatchingValue: 0我们可以通过修改上面的每一 项修改伯德图的风格,比如我们使用下面的语句画我 们的伯德图:P=bodeoptions;P.Grid='on'; P.XLim={[10 40000]};P.XLimMode={'manual'};P.FreqUnits='HZ'; num=[1.576e010 0 0];den=[1 1.775e005 1.579e010 2.804e012 2.494e014];H=tf(num,den; bode(H,P 这时,我们将会看到以下的伯德图: 上面这张图相对就比较好了,它的横坐标单位 是HZ,范围是[10 40K]HZ,而且打开了网格,便于我 们观察-3DB处的频率值。当然,你也可以改变bodeoptions中的其它参数,做出符合你的风格的伯 在Matlab中,大多时候,我们都是用M语言,输入系统的传递函数后,用bode函数绘制bode图对系统进行频率分析,这样做,本人觉得效率远不如Simulink建模高。如何在Matlab/Simulink中画bode图,以前也在网上查过些资料,没看到太多有用的参考。今天做助教课的仿真,又要画电机控制中电流环的bode图,模型已经建好,step response也很容易看出来,可这bode图怎么也出不来,又不愿意用m语言写出传递函数再画。baidu和google 了好一阵,几乎没有一个帖子说的清清楚楚的,经过一番摸索,终于掌握了Simulink里画bode图的方法。.其实,Simulink里画bode图,非常的easy,也很方便。写此文的目的是希望对那些常用Simulink进行仿真希望画bode图又不愿用M语言的新手有所帮助。 以下均是以Matlab R2008a为例。 首先,在simulink里建好model。如图1,这里需要注意的是,输入和输出要用input port 和output port,这样以后画bode图的时候,系统就会知道是这两个变量之间的关系。 图1 建好model 其次,选择线性分析。Tools->Control Design ->Linear Analysis。如图2。 图2 选择Linear Ansysis 将出现如图3所示的Control and Estimation Tools Manager窗口。 图3 Control and Estimation Tools Manager窗口 第三步,激动人心的时刻到了,哈哈。如果你是按照前面的步骤来的,那么这时候,你就应该可以直接画出bode图,在窗口的下方,将“Plot linear analysis result in a ”前面的方框打上勾,已打的就不用管了,再在后面的下拉框里选择“bode response plot”,即画output port和input port之间的bode图,再点击“Linearize Model”按钮,就OK了。其实除了bode图,还可以画其他很多响应曲线,比如step response、impulse response和Nyquist图等等,只需选择相应的step response plot,inpulse response plot或者Nyquist plot等等。方法都是相同的。选择选择“bode response plot”,如图4所示。 图4 画出bode图 4.2 .1 《开环控制系统的工作过程与方式》教学设计 【整体设计说明】 (一)本节在单元中的地位 本课教学内容为苏教版《技术与设计2》第四单元“控制与设计”的第二节“控制系统的工作过程与方式”的第1课时。从总体上看,“控制与设计”这个单元按照控制的手段——控制系统——控制系统的设计这样的思路来组织教材内容。上节课让学生对控制手段和控制应用有所了解,下节课要让学生进一步学习闭环控制系统的基本组成和简单的工作过程,因此,本课教学非常关键,是承上启下的核心内容。 (二)学生学情分析 学生对“控制”一词并不陌生,经常提到控制温度、控制时间、控制音量、控制亮度、控制电流等。在生活、学习中,学生对控制形成了或多或少的感性认识,这些认识仅限于表面现象,对控制系统的组成和工作过程并没有进行过深入思考和研究。但学生毕竟也经常进行控制操作,对控制有一些体会,在物理等学科中学习了电子、传感器基础知识,具有观察和使用简单控制系统的生活体验,这些知识和经验在教学中为学生寻找教材以外的案例提供了条件,为学生配合教师教学提供了可能。 (三)本节整体教学思路 开环控制系统的基本组成与工作过程对后面的闭环控制和控制方案的设计至关重要,所以这节的教学一定要落实到位,使学生真正吃透和理解。要达到这样的效果,教师必须引导学生对典型实例详细分析,使学生对实例中的控制过程和原理有一个清晰的认识,然后再引导学生从中抽取出控制系统的基本组成:传感器、控制器、执行器、被控对象,各个组成部分的功能和作用学生自然也明白了。 对于控制系统的基本组成的作用,学生一般不难理解,但对于它们的工作原理,学生可能会存在许多问题,也极有可能在课堂教学中提出这些疑问。对于疑问的学生,教师要给予表扬和鼓励,这是学生技术素养提高的一个具体表现,培养学生的质疑的教学的一个重要方面。教师要不失时机地进行正确引导,同时在备课过程中应注意相关内容的学习和准备。 在“技术与设计1”中曾提出“技术是综合知识的结晶”。笔者认为在本节内容的教学中可以予以回溯,因为作为控制系统的基本组成涉及的学科比较多,单就传感器来讲,就可能涉及光、声音、射线、压力、温度、化学成分等,回扣这一内容一是可以加深学生对“技术需要综合知识”的进一步理解,二是可以激发学生学习其他学科知识的积极性,强化通用技术课程和其他领域课程的联系。 本节课教学应当避免“纸上谈兵”。教师可以利用学校现有的实验器材、教学设施资源,或通过自制或改制教具,尽量创造条件,利用实物展开教学。比如:声控自动门、游泳池注水系统等。利用这些必能起到事半功倍的效果。 控制系统的工作过程与方式 一、教学目标 1.通过案例分析,归纳控制系统的基本特征; 2.了解开环控制和闭环控制的特点; 3.分析典型案例,熟悉简单的开环控制系统的基本组成和简单的工作过程 4.学会用框图来归纳控制系统实例的基本特征,逐步形成理解和分析简单开环和闭环控制系统的一般方法 二、教学内容分析 本节是“控制与设计”第二节的内容,其内容包括“控制系统”、“开环控制系统与闭环控制系统的组成及其工作过程”是学生在学习控制在我们的生活和生产中的应用后,进一步学习有关控制系统的组成、工作方式以及两种重要的控制系统:开环控制和闭环控制,并熟悉它们工作原理和作用。 生活中不乏简单控制系统的应用,人们对此往往象看待日出日落一类自然景色般的习以为常。本部分内容的学习,正是要引导学生,从技术的角度、用控制的思维看周围的存在,分析其道理,理解其基本的组成和工作过程。 本课教学内容,从学生生活经验出发,从实例分析入手,归纳出对控制系统的一般认识,以及根据控制系统方式分类的开环控制系统和闭环控制系统两类,并侧重对开环控制系统的工作过程、方框图、重要参数进行分析。本课要解决的重点是:开环控制系统的工作过程分析,用方框图描述开环控制系统的工作过程。 三、学习者分析 学生在前面的学习中已经学习和分析了控制在生活生产中的应用,获得了有关控制及其应用的初步感性认识和体验,但是对控制的基本工作方式和工作机理还缺乏了解,他们对进一步了解控制系统的知识是有探究的欲望的。结合前面的应用案例分析,进一步分析案例中控制是如何工作的,以及有怎样的工作方式,是学生学习的最近发展区。 四、教学策略: 1. 教法: 本章的教学结合具体的教学内容和目标我们采用“案例情景—机理分析—总结归纳-认识提升”的模式展开。在教学中把知识点的教与学置于具体的案例情景当中,通过丰富而贴近生活的案例使学生从生活体验到理性分析的思维升华过程。同时关注学生能否用不同的语言表达、交流自己的体验和想法。通过富有吸引力的现实生活中的问题,使学生回想和体会控制系统的工作过程,激发学生的好奇心和主动学习的欲望。让学生本着“回想—分析—联想—猜想”的思维过程,对教学内容进行步步展开,使学生亲历自主探索和思维升华的过程。 2. 学法: 鼓励学生自主探究和合作交流,引导学生自主观察、总结,在与他人的交流中丰富自己的思维方式,获得不同的体验和不同的发展。注意引导学生体会控制系统的工作过程和方式,特别是引导学生会学用系统框图来抽象概括控制系统、帮助分析和理解控制系统的组成及其工作过程的方法 五、教学资源准备 多媒体设备、相关图片资料、技术试验工具、材料等 Matlab中Bode图的绘制技巧 学术收藏 2010-06-04 21:21:48 阅读54 评论0 字号:大中小订阅 我们经常会遇到使用Matlab画伯德图的情况,可能我们我们都知道bode这个函数是用来画bode图的,这个函数是Matlab内部提供的一个函数,我们可以很方便的用它来画伯德图,但是对于初学者来说,可能用起来就没有那么方便了。 譬如我们要画出下面这个传递函数的伯德图: 1.576e010 s^2 H(s)= ------------------------------------------------------------------------------------------ s^4 + 1.775e005 s^3 + 1.579e010 s^2 + 2.804e012 s + 2.494e014 (这是一个用butter函数产生的2阶的,频率范围为[20 20K]HZ的带通滤波器。) 我们可以用下面的语句: num=[1.576e010 0 0]; den=[1 1.775e005 1.579e010 2.804e012 2.494e014]; H=tf(num,den); bode(H) 这样,我们就可以得到以下的伯德图: 可能我们会对这个图很不满意,第一,它的横坐标是rad/s,而我们一般希望横坐标是HZ;第二,横坐标的范围让我们看起来很不爽;第三,网格没有打开(这点当然我们可以通过在后面加上grid on解决)。 下面,我们来看看如何定制我们自己的伯德图风格: 在命令窗口中输入:bodeoptions 我们可以看到以下内容: ans = Title: [1x1 struct] XLabel: [1x1 struct] YLabel: [1x1 struct] TickLabel: [1x1 struct] Grid: 'off' XLim: {[1 10]} XLimMode: {'auto'} YLim: {[1 10]} YLimMode: {'auto'} IOGrouping: 'none' InputLabels: [1x1 struct] OutputLabels: [1x1 struct] InputVisible: {'on'} OutputVisible: {'on'} FreqUnits: 'rad/sec' FreqScale: 'log' MagUnits: 'dB' MagScale: 'linear' MagVisible: 'on' MagLowerLimMode: 'auto' MagLowerLim: 0 PhaseUnits: 'deg' PhaseVisible: 'on' PhaseWrapping: 'off' PhaseMatching: 'off' PhaseMatchingFreq: 0 PhaseMatchingValue: 0 我们可以通过修改上面的每一项修改伯德图的风格,比如我们使用下面的语句画我们的伯德图: P=bodeoptions; P.Grid='on'; P.XLim={[10 40000]}; P.XLimMode={'manual'}; P.FreqUnits='HZ'; num=[1.576e010 0 0]; den=[1 1.775e005 1.579e010 2.804e012 2.494e014]; H=tf(num,den); bode(H,P) 这时,我们将会看到以下的伯德图: 我们经常会遇到使用Matlab画伯德图的情况,可能我们我们都知道bode这个函数是用来画bode图的,这个函数是Matlab内部提供的一个函数,我们可以很方便的用它来画伯德图,但是对于初学者来说,可能用起来就没有那么方便了。 譬如我们要画出下面这个传递函数的伯德图: 1.576e010 s^2 H(s)= ------------------------------------------------------------------------------------------ s^4 + 1.775e005 s^3 + 1.579e010 s^2 + 2.804e012 s + 2.494e014 (这是一个用butter函数产生的2阶的,频率范围为[20 20K]HZ的带通滤波器。) 我们可以用下面的语句: num=[1.576e010 0 0]; den=[1 1.775e005 1.579e010 2.804e012 2.494e014]; H=tf(num,den); bode(H) 这样,我们就可以得到以下的伯德图: 可能我们会对这个图很不满意,第一,它的横坐标是rad/s,而我们一般希望横坐标是HZ;第二,横坐标的范围让我们看起来很不爽;第三,网格没有打开(这点当然我们可以通过在后面加上grid on解决)。 下面,我们来看看如何定制我们自己的伯德图风格: 在命令窗口中输入:bodeoptions 我们可以看到以下内容: ans = Title: [1x1 struct] XLabel: [1x1 struct] YLabel: [1x1 struct] TickLabel: [1x1 struct] Grid: 'off' XLim: {[1 10]} XLimMode: {'auto'} YLim: {[1 10]} YLimMode: {'auto'} IOGrouping: 'none' InputLabels: [1x1 struct] OutputLabels: [1x1 struct] InputVisible: {'on'} OutputVisible: {'on'} FreqUnits: 'rad/sec' FreqScale: 'log' MagUnits: 'dB' MagScale: 'linear' MagVisible: 'on' MagLowerLimMode: 'auto' MagLowerLim: 0 PhaseUnits: 'deg' PhaseVisible: 'on' PhaseWrapping: 'off' PhaseMatching: 'off' PhaseMatchingFreq: 0 PhaseMatchingValue: 0 我们可以通过修改上面的每一项修改伯德图的风格,比如我们使用下面的语句画我们的伯德图:P=bodeoptions; P.Grid='on'; P.XLim={[10 40000]}; P.XLimMode={'manual'}; P.FreqUnits='HZ'; num=[1.576e010 0 0]; den=[1 1.775e005 1.579e010 2.804e012 2.494e014]; H=tf(num,den); bode(H,P) 这时,我们将会看到以下的伯德图: 常见开环控制系统方 框图 常见开环控制系统方框图 开环控制系统:控制系统的输出量不对系统的控制产生任何影响。 开环控制系统特征:系统的输出量仅受输入量控制,输入,量到输出量之间的信号是单向传递。 开环控制系统的方框图: 输入量——控制系统的给定量; 输出量——控制系统所要控制的量; 控制器——对输入信号进行处理并发出控制命令的装置或元件; 执行器——直接对被控对象进行控制的装置或元件; 被控对象——控制系统所要控制的装置或生产过程。 控制量——执行器的输出信号,一般是影响被控量变化的因素;(输出量≠控制量,输出量=被控量) 1.自动门的控制系统 自动门工作过程: (1)当有人到达门前某一距离时,传感器感知,并发出“有人”的信号 (2)控制器接到传感器传来的信号后,经变换放大后传给电动机(这里的电动机叫做执行器,也称为驱动器); (3)电动机根据传来的开门信号转动,门被打开(这里的门叫做被控制对象,也称为控制对象,简称对象) (4)控制器保持开门信号延迟后,自动发出关门信号,电动机反转,门重新关闭。 自动门控制系统的方框图: 人体 热辐射信号 控制 电路电机自动门 门的开 或关 转动 输入量执行器被控对象 输出量 控制量 输入量 (给定 控制器执行器被控对象 输出量 (被控 控制量 2.水泵抽水控制系统: 3.家用窗帘自动控制系统 4.楼道自动声控灯装置 输入量 (接通电 控制器 (控制电 路) 执行器被控对象输出量 水流量 (输入量)控制器执行器被控对象输出量 控制量(转 5. 6.十字路口的红绿灯定时控制系统 7.公园音乐喷泉自动控制系统 输入量 控制器执行器被控对象输出量 控制量(电 输入量 控制器执行器被控对象输出量 控制量(水流 输入量 控制器执行器被控对象输出量 控制量(水流 实验六 系统Bode 图及Nyquist 曲线的绘制及稳定性分析 一、 教学目的 (1) 加深了解系统及元件频率特性的物理概念。 (2) 进一步加深对Bode 图及Nyquist 曲线的了解。 (3) 熟练掌握用MATLAB 分析系统频率特性的方法。 二、 教学内容 (1) 设计一阶惯性环节1 2.01)(+=s s G 模拟电路,并完成频率特性曲线测试。 参考程序: s=tf('s'); G=1/(0.2*s+1); figure(1) nyquist(G) figure(2) bode(G) 说明: ● 命令nyquist()用来绘制系统的nyquist 曲线(开环幅相曲线)。调用格式为 nyquist(sys) nyquist(sys,w) [re,im,w]=nyquist(sys) 其中,sys 为系统开环传递函数模型,第一种格式频率向量w 自动给定,第二种格式频率向量由人工给定,第三种格式不作图,返回变量re 为G(jw)的实部向量,im 仍为G(jw)的虚部向量,w 为频率向量。 ● 函数bode()用来绘制系统的Bode 图,调用格式为: bode(sys) bode(sys,w) [m,p,w]=bode(sys) 其中,sys 为系统开环传递函数模型,第一种格式频率向量w 自动给定,第二种格式w 由人工给定,可由命令logspace()得到对数等分的w 值。第三种格式不作图,返回变量m 为幅值向量,p 为相位向量,w 为频率向量。 (2) 系统的模拟电路原理图及系统的结构框图如图所示, ① 求系统传递函数。取R2=500K Ω,经计算得系统的传递函数为: 500 100500)(2++=s s s G ② 作出系统开环对数幅频特性、相频特性,求出相应的频域性能指标。 参考程序: num=[500]; 二、 对数频率特性 假设:) ()()(ω?ωωj e j H j H =。对其取对数: [][] [])()()()(ln )(ln )(ln ) (ω?ωω?ωωωω?j G j j H e j H j H j +=+== 其虚部正是系统的相频特性,而实部: [])(ln )(ωωj H G = 称为对数增益,反映了系统幅频特性,单位奈培(Np, Neper )。 一般情况下不用自然对数,而取常用对数,定义: [])(log 20)(ωωj H G = 单位:分贝(Deci-Bel,dB)。 奈培与分贝的转换关系:1 Np = 8.686 dB 在理论分析中,一般使用Np ;在实际应用中,一般使用dB 用分贝表示增益,解决了信号动态范围与精度之间的矛盾。如果在频率坐标中同样使用对数坐标,则同样可以解决频率的范围与精度之间的矛盾。这样一来就形成了波特图。 ? 波特图的横坐标可以用ωlog ,也可以用f log ; ? 在波特图的横坐标上,一般直接标注频率值; ? 波特图的横坐标上只能表示0>ω或者0>f 频率下的系统特性。 图中的二、三象限并非表示频率小于零的部分,而是表示频率小于1(大于零)部分频率特性。 ? 根据系统频率特性的共扼对称性,不难得到频率小于零部分的 特性。 ? 在波特图的纵坐标上,可以标注系统幅频特性值(如图中红字所 示),也可以标注分贝值。 ? 为了方便参数的判读,实际工程中的波特图中的刻度也不是按照等 间隔设置的,而是按照对数间隔设置。例如下图。 有专用的对数坐标图纸可以用于手工绘制波特图。 波特图的纵坐标上同样也只表示了系统幅频特性中大于零的部分。 图中的三、四象限并非表示系统的幅频特性小于零,而是表示系统的幅频特性小于1(大于零)。 三、 线性系统的波特图 1、一般系统的波特图 ??? ? ??-==∑ ∑==∏∏--=n i i m i i j n i i m i i e p j z j H j H 111 10 )(αβωωω ∑∑∑∑====-+=---+== =n i pi m i zi n i i m i i G G H p j z j H j H G 1 1 01 10) ()(log 20log 20log 20log 20)(log 20)(ωωωωωω 所以,不仅系统的相频特性是各个零点或极点的相频特性的叠加,而且系统的幅频特性是各个零点或极点的相频特性的叠加。所以,可以根据各个零点或极点的波特图的叠加得到系统的波特图。 2、一次因式的波特图 1) 单个零点的波特图: )1(1 )1()(i i i i i zi T j T z j z z j j H ωω ωω+= -+-=-= (1)幅频特性 ()[] 2 1log 10log 201log 201 log 20)(log 20)(i i i i zi zi T T T j T j H j G ωωωω++-=++== 不过在系统辨识工具箱中有相应的函数能够完成该功能。 应该是invfrqs函数。但这个是由频率响应得到的,所以你的对输入输出信号做傅里叶变换得到频率响应后在用这个函数拟合传递函数。 使用matlab工具箱更为方便和直观: 1. 把u,y信号导入到工作空间里。 2. 用ident命令打开matlab系统辨识工具箱,然后点击import data,从新打开界面里导入工作空间的数据。然后可以通过图形查看该输入输出信号,或者在proprocess进行信号预处理。 3. 根据你的模型在estimate里选择linear parameter models,个人觉得你应该选择ARX 结构,确定阶数,然后进行估计。 4. 在主界面里查看估计模型,并且可以和实际输出比较,看看拟合度。 详细使用方面参考帮助文档System Identification Toolbox User's Guide 也只能是拟合吧,拟合的目标也只能是有限的一些典型传递函数。 做过这个,就是拟合吧 在sisotool工具里放置合适的零极点,尽量使曲线吻合,得到传递函数 我是大概知道实测的曲线的零极点分布的,然后去拟合的,这样好做点 如果已经得到Bode plot,就幅度vs频率,相位vs频率曲线,根据+/-20db/dec,+/-40db/dec 渐近线先预测几个pole,zero,double pole double zero,然后再去近似了。 还有几个比较困难的地方是: 1)实际系统引入的杂散参数和群延迟特性,才是拟合和预测的难点。 2)实际测量时仪器已经采用了离散化的数字处理手段,还有测量系统处理误差和测量时注入的扰动幅度所引起的误差,对低频还好,对高频都是很大的影响。 3)所以目前已有的模型,多是对1/2开关频率之前的预测,V2等新模型有所改进,但是还是有其局限性 以我测试的为例吧, R=1e3; C=1e-7; L=0.1; Rl=1000; magdb_LCR=zeros(1,1e5);% -sL-R-|(1/sC) mag_LCR=zeros(1,1e5); phase_LCR=zeros(1,1e5); freq=(1:1e5); RCplot=zeros(1,1e5); LCRplot=zeros(1,1e5); for f=1:1:1e5 LCR=1/((1i*2*pi*f)^2*L*C+1i*2*pi*f*C*Rl+1); LCRplot(f)=LCR; mag_LCR(f)=abs(LCR); magdb_LCR(f)=20*log10(abs(LCR)); phase_LCR(f)=angle(LCR)*180/pi; end 我用上方的函数写一个已知的传递函数,生成对应频率下的幅值和相位。频率响应曲线如下,需要注意的是,幅值的纵坐标不是dB。开环控制系统与闭环控制系统方框图几例
Matlab中Bode图的绘制技巧(精)
典型环节的Bode图
常见开环控制系统方框图
开环控制系统与闭环控制系统的区别及相关
BODE图画图过程
常见开环控制系统方框图
MATLAB中bode图绘制技巧(精)
使用simulink bode图的绘制
开环控制系统的工作过程和方式[一]
控制系统的工作过程及方式
MATLAB中bode图绘制技巧
matlab绘制bode图技巧
常见开环控制系统方框图知识讲解
第六课 系统Bode图及Nyquist曲线的绘制及稳定性分析
波特图的画法
bode图怎么绘制