自制电弧球
1 电路原理
高压DIY之中,必不可少的器材是一个高压发生器,依靠它可以玩出各种各样的花样。在淘宝上可以买到各种各样的高压模块,小到电蚊拍,负离子发生器,大到电网捕兽机。但是对于我等DIYer来讲,有什么比一个自行量身定做的可调高压发生器更适合呢?
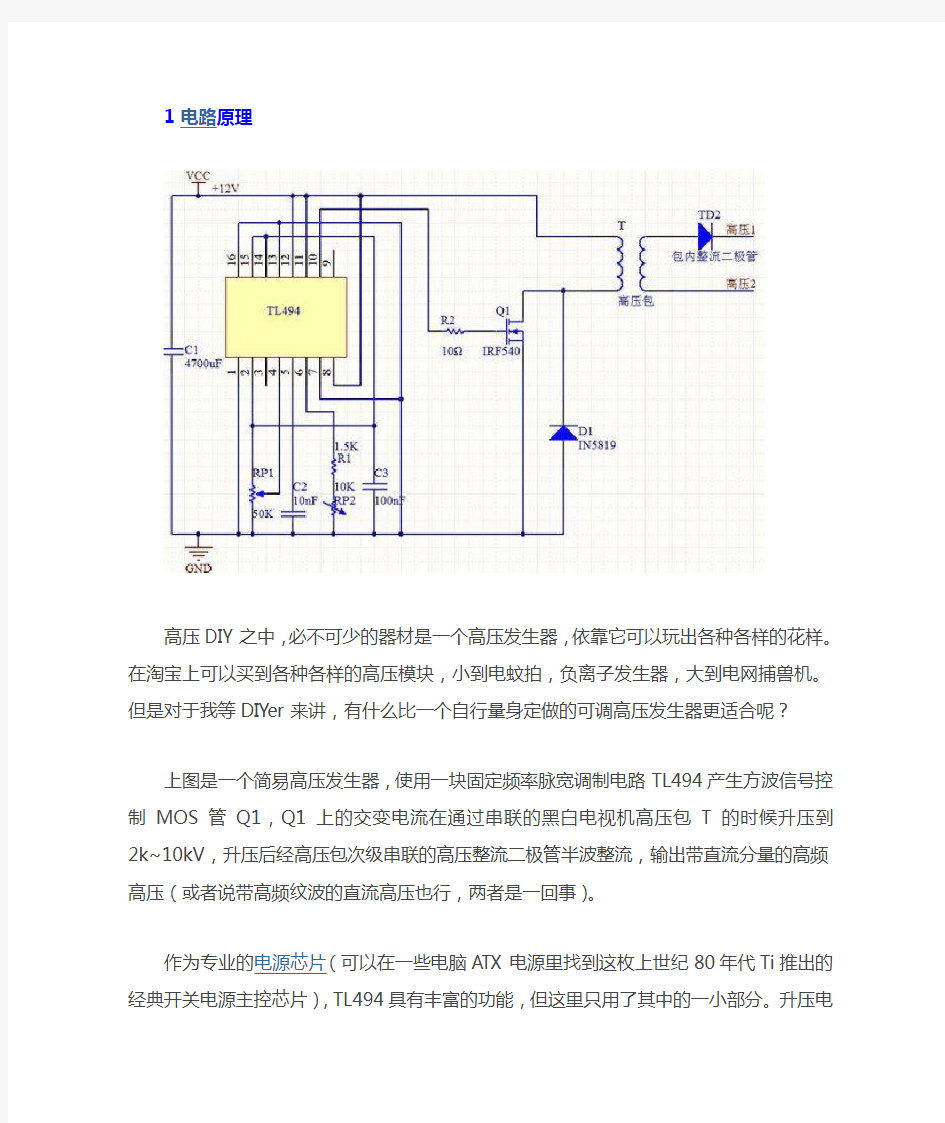
上图是一个简易高压发生器,使用一块固定频率脉宽调制电路TL494产生方波信号控制MOS管Q1,Q1上的交变电流在通过串联的黑白电视机高压包T的时候升压到2k~10kV,升压后经高压包次级串联的高压整流二极管半波整流,输出带直流分量的高频高压(或者说带高频纹波的直流高压也行,两者是一回事)。
作为专业的电源芯片(可以在一些电脑ATX电源里找到这枚上世纪80年代Ti推出的经典开关电源主控芯片),TL494具有丰富的功能,但这里只用了其中的一小部分。升压电路使用了最为简单的不带磁复位的单管正激拓扑,并且没有采样反馈部分,事实上这里的TL494只相当于一个频率和占空比可变的方波发生器,因此也可以用其他的方波振荡电路,比如555集成电路或运放或晶体管构成的多谐振荡器代替。
这个电路的几个重点参数(它们对之后的调试很有用)如下:输出方波的频率由TL494的5脚对地电容和6脚对地电阻决定,fosc=1.1/(R1+RP2)?C2。方波占空比由RP1上的分压决定,可以在0%~100%之间调节,进而调节变压器的电流和输出电压。TL494的工作方式细节
想进一步改进该电路的话,更多可用的正激电源拓扑
2 材料准备
需要的电子器材:
○ 16脚DIP插座x1
○ TL494芯片x1
○ 4700uF,16V电容x1
○ 100nF瓷片电容x1
○ 10nF 瓷片电容x1
○ 50k电位器x1
○ 10k电位器x1
○ 1.5k电阻x1
○ 10欧电阻x1
○ IRF540 MOS管+散热片x1 ○ IN5819二极管x1
○ 8脚黑白电视机高压包x1
○万能电路板(洞洞板)x1 ○导线若干
其他设备:
● 电烙铁
● 焊锡/松香
● 12V/2A电源
● 万用表
● 示波器(最好有)
● 热风枪(如果你选用了贴片元件)
● 调节电位器用的小螺丝刀
大部分元件的宽容度很高,并不要求参数很准确,比如说1.6k或1.8k的电阻都可以用来代替R1。一些有特殊要求的器件如下:● 电位器:普通的电位器就能用,但如果想精确调整的话,推荐使用多圈可调电位器。为了调节方便,还需要一把小螺丝刀。
● MOS管:这里用的是IRF540。用其他MOS管替代的话,要求Vdss在80V以上,Vth的最小值在2V~4V,导通电阻尽可能小(IRF540是0.077欧),同时做好散热片配备。特别要说的一点是,一些高性能的MOS(比如主板上的供电MOS)由于Vth的最小值过低(它们能在很低的栅压下导通,在大部分情况下这是优点),用在这个电路上容易误触发导致占空比调节困难(RP1稍一调整电流就急剧上升),所以使用替代器件时一定要注意参数。
● 高压包:使用黑白电视机的8脚高压包。如果只是产生高压玩玩,可以直接用原有的初级线圈。但是直接在磁棒上重绕初级线圈来提高输出电压也是流行的玩法之一。
● 彩电的高压包不适于这一电路,因为它们的初级设计电压是220V,需要根据匝数对它们进行改装才好用。但是它们的输出电压比黑白电视机高不少,在制作20-40kV输出的高压产生器时少不了它们。
3 焊接电路
焊接电路依照电路图即可,难度不大。出于安全起见最好把高压包和低压部分分开,调试完成后再组装到一起。
一些需要注意的小地方:
?给MOS安上足够大的散热片并留出散热片的空间。我有点后悔散热片用小了,结果调试的时候由于发热不敢加大MOS 电流。
?背面通过大电流的走线不能用小股铜线飞线,我用了大量的锡在万能板上堆出电源线和地线。
?高压包的脚位:4脚是次级线圈的地线,2,5,6,7,8脚则是初级线圈。推荐选用5脚和8脚通入交流信号,但在这些脚中任选两个都会在次级感应出高压,可以根据实际电路中的表现选择。当然,直接在磁棒上用导线自绕初级线圈也是可以的。
4 调试高压发生器
警告:调试的时候有高压触电危险,请千万小心
?首先调试低压部分,先不插上芯片,接上电源以后用万用表测试芯片插座上的供电电压和电路各点电位,确认正常以后断开电源接上芯片。
?示波器这时候可以派上用场了,测量MOS管的栅极电压,一切正常的话就能像我这样在屏幕上看到方波波形——148.8KHz,12.4V峰峰值,一切正常。
?接下来调节方波的频率和占空比,记得之前说过的么?电位器RP1调节占空比,RP2调节频率。把振荡频率调到120KHz左右,占空比约10%,然后进行下一步。断开电源,接上高压包(千万不要在带电的时候干活)。
?这时候如果有一个能显示实时电流的实验电源会很好用,没有的话就需要时刻注意散热片温度避免MOS过热烧毁了。。。。把高压输出线摆到不会影响工作的地方,打开电源输出,注意这时候的电流值。如果过大的话,马上关掉电源,调节RP1减小方波占空比,然后再试。我最后把电流调节到了约600mA,如果需要更高的输出电压可以在散热片允许的范围里提高MOS管电流。
然后小心翼翼的拿起高压包的输出线(可以看到这是厚绝缘层的特制高压线,拿几cm以后的绝缘层,千万不要碰到输出线头….),将线头靠近高压包4脚的引出线,看到蓝紫色的美丽电弧了么?
5 等离子蚀刻
当高压电极接近,极间电场接近空气的击穿强度时,就会击穿空气,产生明亮的电弧。空气中电弧放电产生的等离子体为热等离子体,电子温度与气体温度大致相等,可达103~105K。运用它的局部高温和高化学活性,可以用在烧蚀材料,熔炼金属,表面处理等方面。把上一步中得到的蓝紫色电弧引向白纸,可以看到纸张表面碳化,电弧瞬间烧出了一个小洞。
?更进一步的电弧展示在一个水蜜桃上(苹果梨之类带一定水分的水果都行)进行,将水蜜桃与次级线圈的地线相连,接着就可以用高压输出线的尖端对桃子放电,产生的电弧烧蚀碳化果皮,在上面形成黑色的焦痕。由于电弧的高温,被碳化的只有表层,里面仍然是水灵灵的果肉,普通的火焰可做不到这一点。工作时的电弧实际呈黄色,这是因为果皮中的部分成分受热气化混入等离子体的缘故。只要材料有一定的导电性(例如瓜果肉菜,被打湿的皮革),就可以用这种方法在上面刻字。
?顺便,在这里可以体会一下前面为什么一直要求注意安全:虽然这个高压发生器功率不大,危险性相对而言不是很高,但要在不小心触电时在皮肤上留下焦黑的痕迹和弥漫的烤肉气味还是没有问题的……
6 电弧球
?淘宝上出售的成品电弧球
?或许你在网上或者科技馆见到过图上这样的电弧球,球里漂亮的极光翩翩起舞,当把手指放到上面时还会出现一条随着手指尖端移动的绚丽电弧。归根结底这也是等离子体的功劳,玻璃球中的低压气体在高电压下辉光放电(注意,和之前空气中电弧的弧光放电不同)会随气体不同产生美丽的光芒,实际上这也就是霓虹灯的发光原理。在电弧球中有一个高压发生器,高频高压的电极一端通到玻璃球内的球形电极,另一端接地。当手指接触玻璃球时,电流从玻璃球内电极-气体-玻璃球壳-人体-大地形成回路,于是就产生了随手指移动的漂亮放电电弧。由于球壳与人体间的电容很小,通过的交变电流也极小,因此对人没有危险。
?通过以上的原理分析,很容易发现在已经有了高压发生器的前提下,只需要一个充填了稀薄气体的带电极玻璃球就可以自制电弧球。一个很好的器材是老式的透明电灯泡,以前国内生产的40w以下电灯泡通常抽真空(并且限于技术真空度还略差。)用来做这个再好不过。可惜的是现在的灯泡多数充填氮气和氩气,买到的菲利普灯泡在高压下并不能放电……
?但是我在意想不到的地方找到了一个替代品,就是日光灯启辉器中的玻璃泡。泡中充填了少量氩气,高压放电时发出蓝色光,非常漂亮。唯一的问题就是玻璃泡的体积太小,玩起来不小心的话很容易触电,想和正牌的电弧球一样做成摆设是不可能了……
某位筒子向我推荐了发橘红色光的充气稳压电子管WY-3P,我手头没有所以没法实验,有这玩意的筒子感兴趣的话可以自行玩玩XD。
7 总结在这个电路的基础上,还有很多可以改进的地方。
改进电路拓扑可以大大提高工作效率,加入反馈电路和输出滤波电容则可以得到带稳压的可调高压电源。最为令人兴奋的想法还是在磁棒上重绕初级线圈,这样可以在高压包上获得15kV级别的电压,这样可以获得更为壮观的等离子电弧,同时还可以为我计划中的静电飘升机提供备选电源。
同时,调整占空比可以控制电弧放电的电流大小(也是电弧产生热量的多少),占空比的快速变化足以引发电弧周围空气的快速热胀冷缩,从而发出声音:这是等离子扬声器的原理,由于只有极小质量的空气振动,从而具有极好的高频响应。理论上说在拉出稳定电弧的情况下,在TL494的4脚加载音频信号就可以获得调制的电弧发声(实例),但在实验时这个自制高压发生器发出的声音音量极小,推测可能是高压发生器的功率不够,原来的电弧电流太小的缘故。要改进这一点不仅需要改装高压包,还需要更换散热片和MOS管,工作量稍微大了些。现在它被排在我的计划队列里,等到有好消息的时候我会再来的。
本文转自果壳网。
乒乓球拾取机器人
乒乓球拾取机器人 一、总体方案设计 由于要使用乒乓球拾取机器人的场所多为乒乓球赛场,而赛场一般比较宽敞,且地面平整,而且乒乓球形状规则,体重轻,为了设计小巧简便的乒乓球拾取机器人,首先要选择合适的机械臂的运动形式。 对于直角坐标型机器臂,这种机器臂臂部由三个相互正交的移动副组成。带动腕部分别沿X、Y、Z三个坐标轴的方向作直线移动。结构简单,运动位置精度高。但所占空间较大,工作范围相对较小。在乒乓球赛场妨碍了运动运的运动,且平时放置时占地面积大。 对于关节型的机器臂,由动力型旋转关节和前、下两臂组成。关节型机器人以臂部各相邻部件的相对角位移为运动坐标。动作灵活,所占空间小,工作范围大,能在狭窄空间内饶过各种障碍物。乒乓球机器人使用场地较好,使用关节型结构复杂,不够简便。 对于极坐标型机械臂,臂部由两个转动副和一个移动副组成。产生沿手臂轴X的直线移动,绕基座轴Y的转动和绕关节轴Z的摆动。其手臂可作绕Z轴的俯仰运动,能抓取地面上的物体。通过俯仰来实现上下移动,动作不够灵活,占地面积达,工作范围小。 对于圆柱坐标型机械臂,臂部由一个转动副和两个移动副组成。相对来说,所占空间较小,工作范围较大。 综上,选择圆柱坐标型机械臂是比较合适的。它所占空间较小,工作范围较大,动作比较灵活,且结构相对简单。腰部考电动机带动旋转,肩关节的上下移动是通过电动机转动啮合齿条来实现的,小臂的伸缩是通过气动来实现的。 其次要选择合理的行走机构由于赛场一般比较宽敞,且地面平整,所以选择轮式行走方式是比较合适的。 综上机器人的总体方案图如下 另外,乒乓球在比赛场分布散乱,需要乒乓球能够识别乒乓球的位置,然后
乒乓球捡拾器设计-说明书(可编辑)
乒乓球捡拾器设计-说明书 湖南农业大学东方科技学院 全日制普通本科生毕业设计 乒乓球捡拾器设计 DENIGN OF TENNIS PICK UP DEVICE 学生姓名:熊云鹏 学号:200741914323 年级专业及班级:2007级机制设计制造及其自动化(3)班 指导老师及职称:全腊珍教授 湖南?长沙 提交日期:2011年5月 湖南农业大学东方科技学院全日制普通本科生 毕业设计诚信声明 本人郑重声明:所呈交的本科毕业设计是本人在指导老师的指导下,进行
研究工作所取得的成果,成果不存在知识产权争议。除文中已经注明引用的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品成果。对本文的研究做出重要贡献的个人和集体在文中均作了明确的说明并表示了谢意。本人完全意识到本声明的法律结果由本人承担。 毕业设计作者签名: 年月日 目录 摘要 (1) 关键词 (1) 1 前言 (2) 2 乒乓球捡拾器总体设计说明 (3) 2.1 设计思
想 (3) 2.2乒乓球捡拾器方案选取 (3) 2.3总体方案设计 (4) 2.4 主要参数的确定 (5) 2.5 各部分简要说明 (5) 2.5.1外形框架结构 (5) 2.5.2行走机构 (6) 2.5.3收球机构 (6) 2.5.4传动系统 (7) 2.5.5控制系统 (7) 3外形框架结构和动力机构 (7) 3.1拾取器整体框架结
构 (7) 3.2拾取器动力系统 (8) 5.3拾取器车轮电机选取 (8) 4 滚筒轴的设计计算和校核 (10) 4.1求轴上的功率P、转速n和转矩T (10) 4.2初步确定轴的最小直径 (10) 4.3轴的结构设计 (10) 4.4轴上零件的周向定位 (11) 4.5确定轴上圆角和倒角尺寸 (11) 4.6求轴上的载荷 (11) 5 输送轴的设计计算和校核 (14) 5.1求轴上的功率P、转速n和转矩
乒乓球捡拾器设计
机电一体化系统设计课程设计 题目:乒乓球自动捡拾机 姓名:孔维邈() 杨坚() 孔维邈() 学院:机械与电子工程学院 班级: 机制123 指导老师: 完成时间:2016.01.13
目录 摘要 (1) 关键词 (1) 1前言 (2)
乒乓球自动捡拾机设计 摘要:本乒乓球自动捡拾机收到外部信息时,会自动的去定位乒乓球,同时检测障碍物并避开。执行装置采用皮条与桶相结合的结构,在异步电机转动时,执行机构会将乒乓球压入装球装置。在运动员在需要球或装球装置装满球时,运动员会去换下装球的桶。本乒乓球捡拾器是一款适用于各地区中、大型乒乓球训练基地和训练学校的专业机器。 关键词:乒乓球;捡拾机;设计 1 前言 乒乓球是我国的国球,无数的乒乓球运动员在国际赛场上争金夺银,为祖国带来了无数的荣誉,这些都是和乒乓球在我国的普及是息息相关的。在全国各地业余乒乓球训练基地和乒乓球学校随处可见,专业的乒乓球训练基地和学校也越来越多。随着科学技术的发展,乒乓球的训练也越来越系统化、科学化、合理化。 乒乓球发球机的出现、利用计算机进行乒乓球运动轨迹分析等,这一系列的出现都使乒乓球运动员能够得到更好的锻炼,取得更好的成绩。但是随之而来的问题是大量散落在地上的乒乓球。而人工的拾取乒乓球,一次两次之类的还好,但是一旦拾取多了,拾取球的人腰酸背疼不说,而且其效率也不尽如人意。于是乎,乒乓球拣拾器的相关设计便成为了一个问题。 但目前为止,国内外市场上还没有乒乓球拣球机器的出现。没有专门的相关人员去投入到这个项目的研发中。但是这个项目的未来前景可以说是一片光明。专业乒乓球拣球机可以应用在业余或专业的乒乓球训练基地或训练学校。使用专业乒乓球拣球机可以大大减少乒乓球训练基地或学校的工作人员和运动员拣球的工作量和工作时间,是运动员可以更好的投入到专业的训练当中,从而取得更好的比赛成绩。 本乒乓球自动捡拾机收到外部信息时,会自动的去定位乒乓球。执行装置采用皮条与桶相结合的结构,在异步电机转动时,执行机构会将乒乓球压入装球装置。本乒乓球捡拾器主要包括:总体结构和行走机构、收球机构、传送机构、传动系统和控制部分等。 通过对本乒乓球捡拾器的设计,我们进本上把大学四年所学全部派上用场。是对我们所学的一次综合测试,特别是机械设计和电机设计方面,例如:机械原理,机械
乒乓球游戏机的EDA设计
乒乓球游戏机的设计 学生:xxx指导老师:胡滨 摘要:本课程设计制作了一个乒乓球游戏机。在课程设计中,系统开发平台为MAX+PLUSII,程序设计语言为VHDL。设计的乒乓球游戏机能够正确判断与显示乒乓球的位置,并能自动裁判和记分的装置。本课程设计了乒乓球游戏机程序并进行了程序仿真,从而实现一个完整的乒乓球游戏机。程序通过调试运行,初步实现了设计目标,可应用于实际的乒乓球游戏比赛中。本论文对系统的功能设计、实现流程及正确使用都做了详细的描述。 关键词:乒乓球游戏机;VHDL;MAX+PLUSⅡ;程序仿真;
目录 1引言 (1) 1.1课题设计的目的 (1) 1.2课题设计的内容 (1) 2EDA、VHDA简介 (3) 2.1EDA的发展概况 (3) 2.2硬件描述语言---VHDL (3) 3乒乓球游戏机设计过程 (5) 3.1设计规划 (5) 3.2各个模块原理及程序 (6) 3.2.1乒乓球实体的设计 (6) 3.2.2状态机编程实现 (7) 3.2.3记分译器的设计 (10) 3.2.4构造体的设计 (12) 4系统编译和波形仿真 (14) 4.1系统编译 (14) 4.2系统有关波形的仿真 (14) 结束语 (17) 致谢 (17) 参考文献 (18)
唐艳丽《乒乓球游戏机的设计》第1页共16页 1引言 随着科学技术的发展,人类社会已进入到高度发达的信息化社会,信息社会的发展离不开电子产品的进步。现代电子产品的发展越来越快,各种新型电子元器件和智能化的电子产品已经在国民经济的各个领域和人民生活的各个方面得到了日益广泛的应用。实现这种进步的主要原因就是生产制造技术和电子设计技术的发展。其中电子玩具的发展也是在日益成熟。乒乓球游戏机控制电路是有甲、乙双方参赛,有裁判控制发“球”的三人乒乓球游戏机;它能完成自动裁判和自动计分是一个带数字显示的模拟游戏机。其结构简单、成本低、易操作,安全性强、无污染。乒乓球游戏机还能在娱乐的同时提高我们的反应、应变能力。具有良好的市场发展前景[1]。 1.1课题设计的目的 本文应用状态机,设计了一个乒乓球游戏机的状态机。状态机的实现是符 合人的思维逻辑的,且简单明了[2]。计算机组成原理课程设计是重要的综合性 实践教学环节。 (1)通过该课程设计,结合计算机科学的理论、抽象和设计三种形态,进一步掌握计算机中各功能部件的工作原理和逻辑实现,熟悉乒乓球游戏机 的基本工作原理。 (2)通过该课程设计的学习,总结计算机组成原理课程的学习内容,运用所学的数字电路以及计算机组成和状态机的基本原理、基本知识和基本技 巧,解决某一个具体的实际问题,培养综合分析和解决问题的能力。(3)为今后分析、设计、开发以及使用计算机打下坚实的基础。 1.2课题设计的内容 本文设计的是一个乒乓球游戏机的状态机。利用VHDL,不需要按照传统的设计方法进行烦琐的状态分配、绘制状态、化简状态方程等,就可以简单地根据MDS图直接对状态机进行描述。该设计可以实现的功能如下: (1)该设计一个由甲、乙双方参赛,有裁判的3人乒乓球游戏机。 (2)用8个(或更多个)LED排成一条直线,以中点为界,两人乒乓游戏机是用8个发光二极管代表乒乓球台,中间两个发光二极管兼做乒乓球网,用点亮