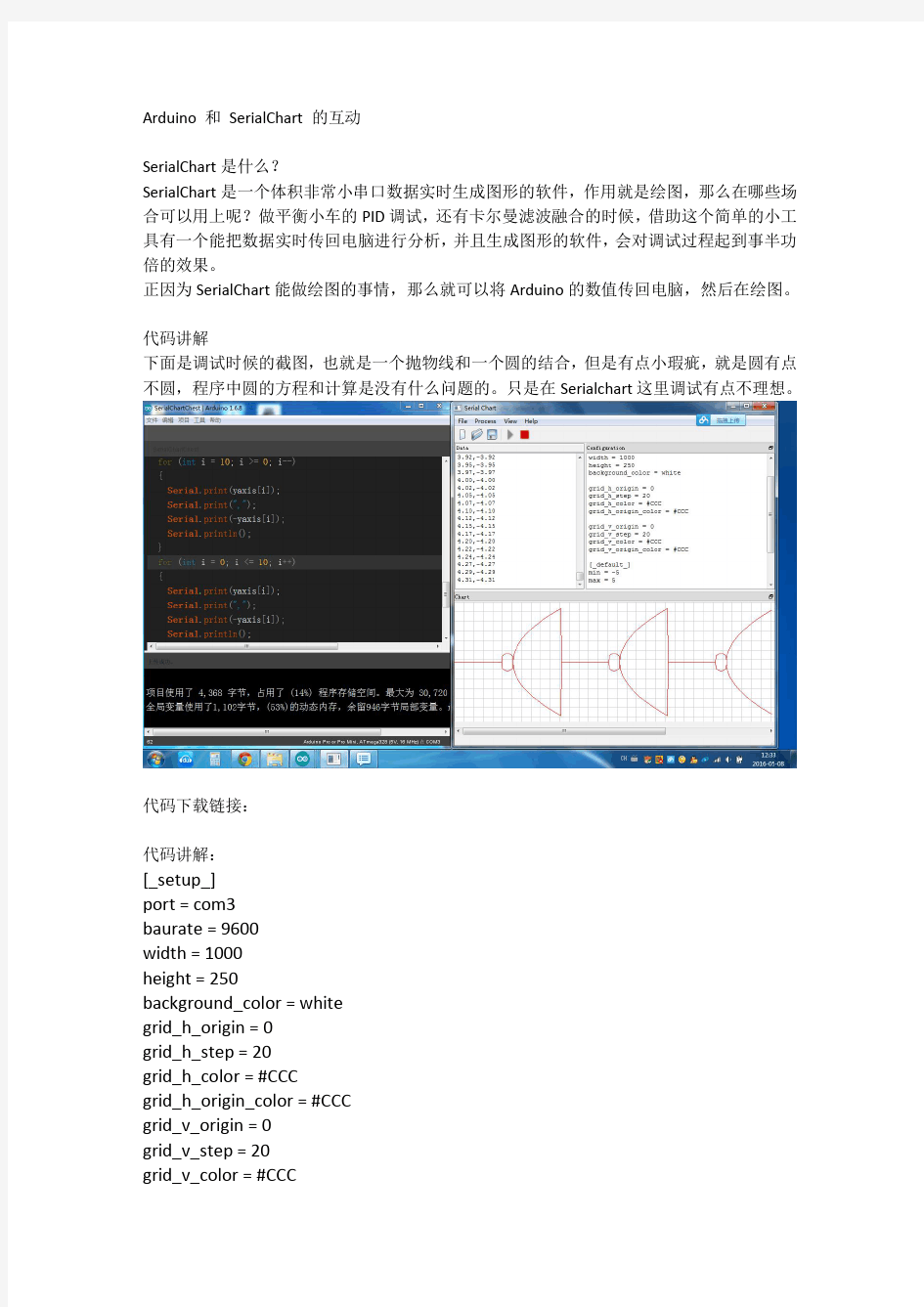
Arduino和串口数据实时图形软件SerialChart
三种串口接受不定长数据方法详解
三种串口接受不定长数据方法详解 方法1:串口接受数据,定时器来判断超时是否接受数据完成。 方法2:DMA接受+IDLE中断 实现思路:采用STM32F103的串口1,并配置成空闲中断IDLE模式且使能DMA接收,并同时设置接收缓冲区和初始化DMA。那么初始化完成之后,当外部给单片机发送数据的时候,假设这帧数据长度是200个字节,那么在单片机接收到一个字节的时候并不会产生串口中断,而是DMA在后台把数据默默地搬运到你指定的缓冲区里面。当整帧数据发送完毕之后串口才会产生一次中断,此时可以利用DMA_GetCurrDataCounter();函数计算出本次的数据接受长度,从而进行数据处理。 应用对象:适用于各种串口相关的通信协议,如:MODBUS,PPI ;还有类似于GPS数据接收解析,串口WIFI的数据接收等,都是很好的应用对象。 关键代码分析: void uart_init(u32 bound); void MYDMA_Enable(DMA_Channel_TypeDef*DMA_CHx); #endif usart.C //初始化IO 串口1 //bound:波特率 void uart_init(u32 bound) { //GPIO端口设置 GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; DMA_InitTypeDef DMA_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA,ENAB LE); //使能USART1,GPIOA时钟
Arduino 语法手册函数部分
Arduino 语法手册函数部分 摘自:函数部分 数字 I/O pinMode() 描述 将指定的引脚配置成输出或输入。详情请见digital pins。 语法 pinMode(pin, mode) 参数 pin:要设置模式的引脚 mode:INPUT或OUTPUT 返回 无 例子 ledPin = 13 语法 noTone(pin) 参数 pin: 所要停止产生声音的引脚 返回 无 shiftOut() shiftOut() 描述 将一个数据的一个字节一位一位的移出。从最高有效位(最左边)或最低有效位(最右边)开始。依次向数据脚写入每一位,之后时钟脚被拉高或拉低,指示刚才的数据有效。 注意:如果你所连接的设备时钟类型为上升沿,你要确定在调用shiftOut()前时钟脚为低电平,如调用digitalWrite(clockPin, LOW)。 注意:这是一个软件实现;Arduino提供了一个硬件实现的SPI库,它速度更快但只在特定脚有效。 语法 shiftOut(dataPin, clockPin, bitOrder, value) 参数 dataPin:输出每一位数据的引脚(int)
clockPin:时钟脚,当dataPin有值时此引脚电平变化(int) bitOrder:输出位的顺序,最高位优先或最低位优先 value: 要移位输出的数据(byte) 返回 无 shiftIn() 描述 将一个数据的一个字节一位一位的移入。从最高有效位(最左边)或最低有效位(最右边)开始。对于每个位,先拉高时钟电平,再从数据传输线中读取一位,再将时钟线拉低。 注意:这是一个软件实现;Arduino提供了一个硬件实现的SPI库,它速度更快但只在特定脚有效。 语法 shiftIn(dataPin,clockPin,bitOrder) 参数 dataPin:输出每一位数据的引脚(int) clockPin:时钟脚,当dataPin有值时此引脚电平变化(int) bitOrder:输出位的顺序,最高位优先或最低位优先 返回 读取的值(byte) pulseIn() 描述 读取一个引脚的脉冲(HIGH或LOW)。例如,如果value是HIGH,pulseIn()会等待引脚变为HIGH,开始计时,再等待引脚变为LOW并停止计时。返回脉冲的长度,单位微秒。如果在指定的时间内无脉冲函数返回。 此函数的计时功能由经验决定,长时间的脉冲计时可能会出错。计时范围从10微秒至3分钟。(1秒=1000毫秒=1000000微秒) 语法 pulseIn(pin, value) pulseIn(pin, value, timeout) 参数 pin:你要进行脉冲计时的引脚号(int)。 value:要读取的脉冲类型,HIGH或LOW(int)。 timeout (可选):指定脉冲计数的等待时间,单位为微秒,默认值是1秒(unsigned long)返回 脉冲长度(微秒),如果等待超时返回0(unsigned long) 例子 int pin = 7; unsigned long duration;
基于MATLAB实时串口数据采集与曲线显示
全日制普通本科生毕业设计 基于MATLAB实时串口数据采集与曲线显示REAL-TIME SERIAL DATA ACQUISITION AND FIGURE SHOW BASED ON MATLAB 学生姓名: 学号: 年级专业及班级: 指导老师及职称: 学院: 提交日期:2011年5月
全日制普通本科生毕业论文(设计) 诚信声明 本人郑重声明:所呈交的本科毕业论文(设计)是本人在指导老师的指导下,进行研究工作所取得的成果,成果不存在知识产权争议。除文中已经注明引用的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品成果。对本文的研究做出重要贡献的个人和集体在文中均作了明确的说明并表示了谢意。本人完全意识到本声明的法律结果由本人承担。 毕业论文(设计)作者签名: 年月日
目录 摘要 (1) 关键词 (1) 1前言 (2) 1.1 Matlab实时串口数据采集研究现状及发展趋势 (2) 1.2研究的目的和意义 (4) 1.3论文的组织结构 (5) 2Matlab下实时串口数据采集概要 (5) 2.1 Matlab的Serial类 (5) 2.2 数据采集 (6) 2.3曲线显示 (7) 3实时串口数据采集与曲线显示的实现 (8) 3.1实时串口通信的实现 (8) 3.2数据采集的实现 (9) 3.3曲线显示GUI的实现 (10) 4基于MATLAB的实时串口数据采集与曲线显示的具体做法 (12) 4.1数据采集的一般流程 (12) 4.1.1创建接口对象并设置属性 (12) 4.1.2打开串口设备对象 (12) 4.1.3读写串口操作 (13) 4.1.4关闭并清除设备对象 (13) 4.2基于Matlab中断方式的实时串行通信编程 (13) 4.3绘制采集数据的曲线波形和数据显示 (14) 4.3.1绘制曲线波形 (14)
基于单片机实时时钟-串口显示
/*******************说明:************************** 将实时时钟数据通过串口发送 -------------------------------------------------- 基于51/AVR最小系统板及DS1302实时时钟模块编写 **************************************************/ #include 串口通讯数据处理算法分析与实现 【摘要】本文介绍了串口通讯数据接收处理的一般方法。该方法利用循环FIFO缓冲区,获取串口数据,并根据状态转移法对通讯报文进行分析,从而获得符合协议要求的有效报文。文章通过实例验证了状态转移法分析串口通讯数据的有效性,为实际的工程应用提供了一定的指导。 【关键词】循环缓冲区;串口通讯数据处理;状态转移法 1.应用背景 在目前很多的工程化控制应用中,大部分采用了PC机和多台单片机构成的主从系统。单片机主要进行数据采集,处理现场信号,驱动执行机构;PC机则通过对单片机进行集中管理,完成信息显示,数据运算并做出决策以分配任务。PC 机与单片机之间则需通过通讯方式完成数据交互,在众多通讯接口中,串口通讯应用比较普遍。 串口通讯方式有三种:RS232、RS422和RS485;RS-232是串行数据接口标准,最初都是由电子工业协会(EIA)制订并发布的,RS-232在1962年发布,命名为EIA-232-E,作为工业标准,以保证不同厂家产品之间的兼容。RS-422由RS-232发展而来,它是为弥补RS-232的不足而提出的。为改进RS-232通信距离短、速率低的缺点,RS-422定义了一种平衡通信接口,将传输速率提高到10Mb/s,传输距离延长到4000英尺(速率低于100kb/s时),并允许在一条平衡总线上连接最多10个接收器。RS-422是一种单机发送、多机接收的单向、平衡传输规范,被命名为TIA/EIA-422-A标准。为扩展应用范围,EIA又于1983年在RS-422基础上制定了RS-485标准,增加了多点、双向通信能力,即允许多个发送器连接到同一条总线上,同时增加了发送器的驱动能力和冲突保护特性,扩展了总线共模范围,后命名为TIA/EIA-485-A标准。由于EIA提出的建议标准都是以“RS”作为前缀,所以在通讯工业领域,仍然习惯将上述标准以RS作前缀称谓。 串口通讯是按照字节流的方式来进行的,即每中断一次,表明成功传送或者接收一个字节。 2.通讯协议 要进行数据通讯,那么通讯双方必须遵循一定格式的协议,这样,通讯双方才能够相互理解从对方所接收过来的数据。 串口通讯协议一般包含这样几个域:帧头、用户数据和帧尾。为保证数据的有效性,一般加强了帧头和帧尾,帧头包含前导码、帧长度和帧号,有的增加了发方地址和收方地址,有的通讯协议将帧长度放在帧号的后面;帧尾主要是整个数据域与帧头校验的结果,类型有CRC检验、奇偶检验或异或偶校验等。有的 Arduino编程参考手册 首页 程序结构变量基本函数 程序结构 (本节直译自Arduino官网最新Reference) 在Arduino中, 标准的程序入口main函数在内部被定义, 用户只需要关心以下两个函数: setup() 当Arduino板起动时setup()函数会被调用。用它来初始化变量,引脚模式,开始使用某个库,等等。该函数在Arduino板的每次上电和复位时只运行一次。 loop() 在创建setup函数,该函数初始化和设置初始值,loop()函数所做事的正如其名,连续循环,允许你的程序改变状态和响应事件。可以用它来实时控制arduino板。 示例: 控制语句 if if,用于与比较运算符结合使用,测试是否已达到某些条件,例如一个输入数据在某个范围之外。使用格式如下: 该程序测试value是否大于50。如果是,程序将执行特定的动作。换句话说,如果圆括号中的语句为真,大括号中的语句就会执行。如果不是,程序将跳过这段代码。大括号可以被省略,如果这么做,下一行(以分号结尾)将成为唯一的条件语句。 圆括号中要被计算的语句需要一个或多个操作符。 if...else 与基本的if语句相比,由于允许多个测试组合在一起,if/else可以使用更多的控制流。例如,可以测试一个模拟量输入,如果输入值小于500,则采取一个动作,而如果输入值大于或等于500,则采取另一个动作。代码看起来像是这样: else中可以进行另一个if测试,这样多个相互独立的测试就可以同时进行。每一个测试一个接一个地执行直到遇到一个测试为真为止。当发现一个测试条件为真时,与其关联的代码块就会执行,然后程序将跳到完整的if/else结构的下一行。如果没有一个测试被验证为真。缺省的else语句块,如果存在的话,将被设为默认行为,并执行。 注意:一个else if语句块可能有或者没有终止else语句块,同理。每个else if分支允许有无限多个。 竭诚为您提供优质文档/双击可除串口采集数据,表格显示 篇一:基于matlab实时串口数据采集与曲线显示 全日制普通本科生毕业设计 基于matlab实时串口数据采集与曲线显示 Real-timeseRialdataacquisitionandFiguReshow basedonmatlab 学生姓名: 学号: 年级专业及班级: 指导老师及职称: 学院: 提交日期:20xx年5月 全日制普通本科生毕业论文(设计) 诚信声明 本人郑重声明:所呈交的本科毕业论文(设计)是本人在指导老师的指导下,进行研究工作所取得的成果,成果不存在知识产权争议。除文中已经注明引用的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品成果。对 本文的研究做出重要贡献的个人和集体在文中均作了明确 的说明并表示了谢意。本人完全意识到本声明的法律结果由本人承担。 毕业论文(设计)作者签名: 年月日 目录 摘要1关键词11前言2 1.1matlab实时串口数据采集研究现状及发展趋势2 1.2研究的目的和意义4 1.3论文的组织结构52matlab下实时串口数据采集概要5 2.1matlab的serial类5 2.2数据采集6 2.3曲线显示73实时串口数据采集与曲线显示的实现8 3.1实时串口通信的实现8 3.2数据采集的实现9 3.3曲线显示gui的实现104基于matlab的实时串口数据采集与曲线显示的具体做法12 4.1数据采集的一般流程12 4.1.1创建接口对象并设置属性12 4.1.2打开串口设备对象12 4.1.3读写串口操作13 4.1.4关闭并清除设备对象13 4.2基于matlab中断方式的实时串行通信编程13 4.3绘制采集数据的曲线波形和数据显示14 4.3.1绘制曲线波形14 4.3.2数据显示15 4.3.3采集图像15 4.4扩展功能——发送数据175结论17参考文献18致谢19 附录19附录120 基于matlab实时串口数据采集与曲线显示 摘要:数据采集是获取信息的基本手段,数据采集技术作为信息科学的一个重要分支,它研究信息数据的采集、存储、处理及控制等作业,具有很强的实用性,与传感器、信号测量与处理、微型计算机等技术为基础而形成的一门综合应用技术。本设计是在matlabR20xxa版本中以串口通信实时接收目标系统数据,将采集的数据进行时间同步和字对齐处理,并在matlab的数据采集工具箱支持下,利用图形界面gui的设计,直观的实时显示数据曲线。设计得重点在于在matlab上实现串口数据同步采集与处理,接收数据的时间同步和字对齐,同时扩展了发送数据的功能。关键词:matlab;gui;实时串口;数据采集;曲线显示; 读取串口数据 方法一:使用VC++提供的串行通信控件MSComm 首先,在对话框中创建通信控件,若Control工具栏中缺少该控件,可通过菜单Project --> Add to Project --> Components and Control插入即可,再将该控件从工具箱中拉到对话框中。此时,你只需要关心控件提供的对Windows 通讯驱动程序的 API 函数的接口。换句话说,只需要设置和监视MSComm控件的属性和事件。 在ClassWizard中为新创建的通信控件定义成员对象(CMSComm m_Serial),通过该对象便可以对串口属性进行设置,MSComm 控件共有27个属性,这里只介绍其中几个常用属性: CommPort 设置并返回通讯端口号,缺省为COM1。 Settings 以字符串的形式设置并返回波特率、奇偶校验、数据位、停止位。 PortOpen 设置并返回通讯端口的状态,也可以打开和关闭端口。 Input 从接收缓冲区返回和删除字符。 Output 向发送缓冲区写一个字符串。 InputLen 设置每次Input读入的字符个数,缺省值为0,表明读取接收缓冲区中的全部内容。 InBufferCount 返回接收缓冲区中已接收到的字符数,将其置0可以清除接收缓冲区。 InputMode 定义Input属性获取数据的方式(为0:文本方式;为1:二进制方式)。 RThreshold 和 SThreshold 属性,表示在 OnComm 事件发生之前,接收缓冲区或发送缓冲区中可以接收的字符数。 以下是通过设置控件属性对串口进行初始化的实例: BOOL CSampleDlg:: PortOpen() { BOOL m_Opened; ...... m_Serial.SetCommPort(2); // 指定串口号 m_Serial.SetSettings("4800,N,8,1"); // 通信参数设置 m_Serial.SetInBufferSize(1024); // 指定接收缓冲区大小 m_Serial.SetInBufferCount(0); // 清空接收缓冲区 m_Serial.InputMode(1); // 设置数据获取方式 作者:GG 功能:实现matalb与PC外设通讯 本例:串口232与外设单片机51通讯。实时监控51数据并且实时图形显示 时间:2011—9—16 简介:实现该功能使用M脚本文件和函数文件。 第一个文件连接串口和打开串口,设置了串口的一些参数和触发事件。连接串口COM5。有关该方面的知识请自行百度I/O文字流。 第二个文件是时间回调函数,相当于其他语言中例如C语言的中断函数 第三文件是关闭串口和清除列连接。并且清除中间TXT中介文件内容 下面是源文件 第一个: clear all s=serial('COM5');%打开串口 s.BytesAvailableFcnMode='byte';%设置事件触发为接受触发 s.InputBufferSize=5000;%设置接受缓冲区大小为5000个字节 s.BytesAvailableFcnCount=10;%每次接受到50个数据时候触发事件 s.BaudRate=19200;%设置通讯波特率 s.BytesAvailableFcn=@my_callback;%指向触发事件函数 fopen(s);%打开串口 第二个 function my_callback(obj,event) out=fread(obj,10,'uint8');%串口处读出50个数据 fid=fopen('G1.txt','a+');%打开文件并且追加 fprintf(fid,'%3d',out); fclose(fid); speed=textread('G1.txt','%u'); plot(speed); disp('save ok!'); end 第三个 fclose(s);%关闭串口 delete(s);%删除串口变量 clear all; fid=fopen('G1.txt','w');%清除中间文件txt a=[]; fprintf(fid,'%s',a); fclose(fid); clear all;%清除所以变量 VB6 实时串口通信数据采集代码 介绍VB6.0利用MSComm通信控件,开发微机通过串口对工业仪表进行实时数据采集的编程技术。给出的程序代码具有通用性,并有详细的注释,可以直接或稍加改动后用于其他数据采集或实时控制程序中。 ----一台工业专用实时检测仪表,接高精度位移传感器,用于测量微小形变或微量位移,仪表测量精度为0.01毫米,测量范围最大值为50毫米。该仪表带有一个9针的RS-232C 串口,能与微机进行串口数据通信,实时传送检测数据,通过微机软件处理可实现工业实时监控。 ----该仪表的串口数据通信协议是:数据传输速率为9600bps,1位开始位,8位数据位,1位停止位,无奇偶校验位。仪表每秒发送50帧检测数据,每帧数据由4个字节组成。第一个字节定义为二进制常数0F0H,是每帧数据开始的标志字节;后面连续2个字节为数据字节,采用压缩的BCD码编码方式,高位在前,低位在后,即一个字节表示两位十进制数,则两个字节表示四位十进制数,小数点采用固定形式,定义在两字节中间;第四个字节为符号字节,该字节第八位为1,即:1 x x x x x x x 则为负数;第八位为0,即:0 x x x x x x x 则为正数。 ----例如:0F0H 26H 87H 80H 0F0H 34H 62H 00H 表示-26.87 34.62。 ----通信传输速率为9600bps,则最快速度1.04ms发送一帧数据。 9600bps = 1200Bps这样计算出来的结果相当于8bits/Frame,现在串口中协议是10bits/Frame,求解方程1200 * 8 = x * 10得到x = 960Frame/s。1000/960 = 1.04167Frame/ms。仪表每秒发送50帧数据,每帧数据有4个字节,即每秒发送200个字节,平均5.0ms 发送一个字节,连续读取串口数据时要在程序中添加循环等待程序。----为了实现实时监测功能,接收数据的读取要尽可能的快速,则设置MSComm1的属性如下: RThreshold = 1 接收缓冲区收到一个字节产生OnComm事件 InputLen = 1 每次读取一个字节 ----仪表每秒发送50帧数据,微机收到一帧完整数据至少需要20 ms 时间(1000/50=20),然后再进行数据处理。①如果微机在下一帧数据接收前即20ms内能将数据计算处理完毕,则接收缓冲区内只会保存有一帧数据,不会存有两帧以上数据,接收缓冲区的大小不会影响实时监测效果(接收缓冲区>4字节),这时完全可以实现实时监测或实时控制;②如果微机在20ms内不能将数据计算处理完毕,接收缓冲区设置得又很大,在数据计算处理完毕前,接收缓冲区内就会保存有两帧以上数据,而且一次工作时间越长,缓冲区内滞留数据帧就越多,数据采集和数据处理之间产生逐渐增大的额外时间差,当接收缓冲区充满后,时间差不再增大,固定在某一值,部分数据因不能及时采集到接收缓冲区中,数据产生丢失现象,真实工作情况就会和微机处理结果产生较大的时间差,对实时监测和实时控制很不利,这种情 ARDUINO入门及其简单实验(7例) (1) 1. Arduino硬件开发平台简介 (1) 1.1 Arduino的主要特色 (2) 1.2 Arduino的硬件接口功能描述 (3) 1.3 Arduino的技术性能参数 (3) 1.4 电路原理图 (4) 2. Arduino软件开发平台简介 (5) 2.1 菜单栏 (5) 2.2 工具栏 (6) 2.3 Arduino 语言简介 (6) 3. Arduino开发实例中所用部分器件 (8) 1. LED简介 (8) 2. 光敏电阻简介 (9) 3. 直流电机简介 (9) 4. 电位器简介 (10) 4. Arduino平台应用开发实例 (10) 4.1【实作项目一】利用LED作光敏电阻采样实验 (10) 4.2【实作项目二】利用PWM信号控制LED亮度 (12) 4.3【实作项目三】单键控制一只LED的亮灭 (15) 4.4【实作项目四】利用PWM控制直流电机转速 (17) 4.5【实作项目五】利用电位器手控LED亮度 (19) 4.6【实作项目六】控制LED明暗交替 (21) 4.7【实作项目七】利用光敏电阻控制LED的亮灭 (23) ARDUINO入门及其简单实验(7例) 1. Arduino硬件开发平台简介 Arduino硬件是一块带有USB的I/O接口板(其中包括13条数字I/O引脚,6通道模拟输出,6通道模拟输入),并且具有类似于Java、C语言的集成开发环境。Arduino 既可以扩展一些外接的电子元器件,例如开关、传感器、LED、直流马达、步进马达或其他输入、输出装置;Arduino也可以独立运行,成为一个可以跟交互软件沟通的接口装置,例如:Flash、Processing、Max/MSP、VVVV或其他互动软件。Arduino 开发环境IDE全部开放源代码,可以供大家免费下载、利用,还可以开发出更多激发人们制作欲望的互动作品。 基于C++Builder的串口数据实时曲线绘制的实现 范寒柏, 赵建锐, 谢汉华时间:2011年10月27日来源:微型机与应用2011年第14期 关键词:C++ Builder实时曲线MSComm控件串行通信 摘要:介绍了在C++ Builder 6.0软件开发环境下设计温盐深实时数据采集与处理系统的方法,其中PC机与数据接收装置之间的串行通信采用MSComm串行通信控件来实现,并给出了相应的程序代码,利用模拟数据源模拟现场采集数据,将实地测量得到的温度和电导率值依次通过串口传输到本软件中,结果证实系统运行稳定,该后台软件以实时曲线绘制的方式形象、直观地显示了采集的温盐深数据,并能把盐度、密度、声速的曲线绘制出来,运行良好。 关键词:C++ Builder; 实时曲线; MSComm控件; 串行通信 在海洋投弃式温盐深剖面测量中,需要进行大量的实时数据采集和可视化显示,经过软件处理后形成的曲线比原始数据更能给人直观的印象。C++ Builder是一种面向对象的可视化应用程序开发工具,为程序开发人员提供了十分轻松而快捷的开发环境。它以其友好的界面设计和方便的编程实现,广泛应用于工程实践中。本系统在C++ Builder环境下针对抛弃式温盐深剖面测量系统进行软件设计。其中利用C++ Builder进行数据的串行传输的方法,只要根据实际情况对代码稍做修改,即可应用到其他的以串口测量的系统,具有一定的通用性。 1 系统概述 该软件在Windows操作系统下以C++ Builder为开发平台,应用于海洋投弃式温盐深剖面测量系统中的实时数据采集与处理。如图1所示,其主要包含与下位机通信、实时数据处理、实时曲线显示和数据导出,浏览等部分。软件以RS 232方式与下位机进行通信。对接收的数据进行处理和温度盐度曲线绘制后可在每次测量结束后自动将所有数据存储到Realtime Data文件夹和Backup文件夹中。操作人员可以对历史数据进行查询,并根据需要打印。 2 串口通信 2.1 MSComm控件 MSComm(Microsoft Communications Contro1)控件是Microsoft公司提供的简化Windows 下串行通信编程的ActiveX控件,它为应用程序提供了通过串行接口收发数据的简便方法。它的安装也十分简单,只需把VB安装目录下Mscomm.reg、Mscomm32.ocx、Mscomm32.dep 这三个文件拷贝到Windows的system32目录下。然后用Windows下的注册工具regsvr32注册该OCX控件,剩下的工作是在C++ Builder中导入这个ActiveX控件,进入C++ Builder 环境在Component菜单下选Import ActiveX Control,这时在列表中可以看到Microsoft Comm Control 6.0选项, 选中这个选项点击Install按钮,完成安装。在ActiveX控件页面上可以看到一个为电话图标的控件,这就是MSComm控件。 MSComm控件有很多属性,如CommPort属性用来设置或返回通信端口号,可以设置为1~16 第十五课Arduino I/O函数 Arduino板上的引脚可以配置为输入或输出。我们将在这些模式下解释引脚的功能。重要的是要注意,大多数Arduino模拟引脚可以按照与数字引脚完全相同的方式进行配置和使用。 引脚配置为INPUT Arduino引脚默认配置为输入,因此在使用它们作为输入时,不需要使用 pinMode()显式声明为输入。以这种方式配置的引脚被称为处于高阻抗状态。输入引脚对采样电路的要求非常小,相当于引脚前面的100兆欧的串联电阻。 这意味着将输入引脚从一个状态切换到另一个状态所需的电流非常小。这使得引脚可用于诸如实现电容式触摸传感器或读取LED作为光电二极管的任务。 被配置为pinMode(pin,INPUT)的引脚(没有任何东西连接到它们,或者有连接到它们而未连接到其他电路的导线),报告引脚状态看似随机的变化,从环境中拾取电子噪音或电容耦合附近引脚的状态。 上拉电阻 如果没有输入,上拉电阻通常用于将输入引脚引导到已知状态。这可以通过在输入端添加上拉电阻(到5V)或下拉电阻(接地电阻)来实现。10K电阻对于上拉或下拉电阻来说是一个很好的值。 使用内置上拉电阻,引脚配置为输入 Atmega芯片内置了2万个上拉电阻,可通过软件访问。通过将pinMode()设置为INPUT_PULLUP可访问这些内置上拉电阻。这有效地反转了INPUT模式的行为,其中HIGH表示传感器关闭,LOW表示传感器开启。此上拉的值取决于所使用的微控制器。在大多数基于AVR的板上,该值保证在20kΩ和50kΩ之间。在Arduino Due上,它介于50kΩ和150kΩ之间。有关确切的值,请参考板上微控制器的数据表。 当将传感器连接到配置为INPUT_PULLUP的引脚时,另一端应接地。在简单开关的情况下,这会导致当开关打开时引脚变为高电平,当按下开关时引脚为低电平。上拉电阻提供足够的电流来点亮连接到被配置为输入的引脚的LED。如果项目中的LED似乎在工作,但很昏暗,这可能是发生了什么。 控制引脚是高电平还是低电平的相同寄存器(内部芯片存储器单元)控制上拉电阻。因此,当引脚处于INPUT模式时,配置为有上拉电阻导通的引脚将被开启;如果引脚通过 备注: Arduino Function: BLEPeripheral.connected() (缺失) Arduino BLE 函数库 描述 蓝牙低功耗(BLE)协议从蓝牙规范版本4.0开始。虽然以前的规范只允许制作一种无线UART,但该版本允许更智能的资源使用。结果是适用于大多数具有限制能量需求的芯片的低功率通信。BLE协议由多个角色组成。BLE节点可以作为外设,中央,广播和观察者。 广播角色周期性地发送具有数据的广告包。它不支持建立连接。理论上,广播机构的角色可以用于仅发射机的无线电。 观察者角色收听来自广播对等体的广告数据包中嵌入的数据。 中心是能够建立到对等体的多个连接的设备。中心角色始终是连接的发起者,并且基本上允许设备进入网络。 外设使用广告包来允许中心找到它,并且随后建立与之的连接。BLE协议经过优化,至少在处理能力和内存方面要求极少的外设实现资源。 中央和外围设备不得与客户端和服务器错误。他们之间没有联系。中央和外围设备可以是客户机,服务器或两者,具体取决于应用 数据结构 BLE数据结构分层组成。属性是定义的最小数据实体。属性被分组到服务中,每个服务可以包含零个或多个特征。这些特征又可以包括零个或多个描述符。 每个服务,特征和描述符都由UUID标识。 通用唯一标识符(UUID)是保证(或具有高概率)的全局唯一的128位(16字节)数字。您可以定义自己的UUID或使用标准的UUID。 每个属性都可以有权限。 权限是指定可以对每个特定属性执行哪些操作以及具体安全要求的元数据。 广告包(广播包) 广告包是周边中心知道可用的方式。在广告包中有关于外设的主要信息。广告包长度为31字节,并且必须符合减少内部有效信息数量的特定格式。如果中心想要进一步的信息,它可以发送一个扫描请求来请求另一个称为扫描响应的数据包,以便拥有其他31字节的信息。如果您没有足够的数据传输,并且31字节(或62个最终)广告数据包就足够了,您可以实现广播者角色并传输数据,而无需建立连接。如果您有更多的数据要传输,则必须执行外设角色进行传输。 有关广告包的进一步信息可以在此链接中找到,其中包含对此参数的基本介绍。 更多信息 在本节中,我们尝试简要介绍BLE标准。然而,BLE标准比这更广泛。如果你想加深一些争论,那里是链接到BLE标准规范: https://https://www.360docs.net/doc/5f15628674.html,/specifications/bluetooth-core-specification 有关BLE的其他有用信息及其在nRF52上的工作方式可以在北欧半导体网站上找到:https://https://www.360docs.net/doc/5f15628674.html,/index.jsp 北欧还提供了一个有用的应用程序,通过BLE与您的板进行交互。使用此应用程序可以读写特性并调试BLE通信: https://https://www.360docs.net/doc/5f15628674.html,/eng/Products/Nordic-mobile-Apps/nRF-Connect-for -mobile-previously-called-nRF-Master-Control-Panel 相关功能 用单片机的模拟串口读取TFmini的数据 朱铮南 STC15W104单片机只有8个针脚,刚好满足读取激光测距模块TFmini的数据并用74HC595驱动的四位数码管显示所需要的针脚。遗憾的是STC15W104不具有串口功能,只能用普通针脚来模拟串口。 本文代码里的“读1帧函数”就是模拟串口。 激光测距模块TFmini输出的串口信号的波特率是115200,起始位和结束位各占1位,数据占8位,可以算出传输一位数据的时长是1000000us/115200=8.68us。 本例中的模拟串口采用了代码延时和定时器溢出中断相结合的方法,起始位开始后用代码延时3us再启动定时器,定时器溢出中断产生8.68us的时间间隔用来读取每一位的数据。定时器的初始化代码放在主函数一开头的地方。 实践证明这个模拟串口工作非常稳定。 完整的代码如下。 /****************************************************************** **STC15W104模拟串口读TFmini,74HC595驱动数码管显示。朱铮南编写 *******************************************************************/ #include ; Arduino 语法手册函数部分 摘自:函数部分 数字 I/O pinMode() 描述 将指定的引脚配置成输出或输入。详情请见digital pins。 语法 pinMode(pin, mode) # 参数 pin:要设置模式的引脚 mode:INPUT或OUTPUT 返回 无 例子 ledPin = 13 语法 … noTone(pin) 参数 pin: 所要停止产生声音的引脚 返回 无 shiftOut() shiftOut() ) 描述 将一个数据的一个字节一位一位的移出。从最高有效位(最左边)或最低有效位(最右边)开始。依次向数据脚写入每一位,之后时钟脚被拉高或拉低,指示刚才的数据有效。 注意:如果你所连接的设备时钟类型为上升沿,你要确定在调用shiftOut()前时钟脚为低电平,如调用digitalWrite(clockPin, LOW)。 注意:这是一个软件实现;Arduino提供了一个硬件实现的SPI库,它速度更快但只在特定 脚有效。 语法 shiftOut(dataPin, clockPin, bitOrder, value) 参数 dataPin:输出每一位数据的引脚(int) clockPin:时钟脚,当dataPin有值时此引脚电平变化(int) bitOrder:输出位的顺序,最高位优先或最低位优先 value: 要移位输出的数据(byte) ^ 返回 无 shiftIn() 描述 将一个数据的一个字节一位一位的移入。从最高有效位(最左边)或最低有效位(最右边)开始。对于每个位,先拉高时钟电平,再从数据传输线中读取一位,再将时钟线拉低。 注意:这是一个软件实现;Arduino提供了一个硬件实现的SPI库,它速度更快但只在特定脚有效。 语法 《 shiftIn(dataPin,clockPin,bitOrder) 参数 dataPin:输出每一位数据的引脚(int) clockPin:时钟脚,当dataPin有值时此引脚电平变化(int) bitOrder:输出位的顺序,最高位优先或最低位优先 返回 读取的值(byte) pulseIn() 描述 《 读取一个引脚的脉冲(HIGH或LOW)。例如,如果value是HIGH,pulseIn()会等待引脚变为HIGH,开始计时,再等待引脚变为LOW并停止计时。返回脉冲的长度,单位微秒。如果在指定的时间内无脉冲函数返回。 此函数的计时功能由经验决定,长时间的脉冲计时可能会出错。计时范围从10微秒至3分钟。(1秒=1000毫秒=1000000微秒) 语法 pulseIn(pin, value) pulseIn(pin, value, timeout) 参数 1、在OnComm 事件中接收数据: 这种方式能充分MSCOMM控件的特性。OnComm 事件还可以检查和处理通讯错误;可以通过检查CommEvent 属性的值来查询事件和错误;对于不定长数据以及对数据进行处理比较复杂的情况,此法不是很方便。 Private Sub MSComm_OnComm () Select Case https://www.360docs.net/doc/5f15628674.html,mEvent ' 错误 Case comEventBreak ' 收到Break。 Case comEventCDTO ' CD (RLSD) 超时。 Case comEventCTSTO ' CTS Timeout。 Case comEventDSRTO ' DSR Timeout。 Case comEventFrame ' Framing Error Case comEventOverrun '数据丢失。 Case comEventRxOver'接收缓冲区溢出。 Case comEventRxParity' Parity 错误。 Case comEventTxFull '传输缓冲区已满。 Case comEventDCB '获取DCB] 时意外错误 ' 事件 Case comEvCD ' CD 线状态变化。 Case comEvCTS ' CTS 线状态变化。 Case comEvDSR ' DSR 线状态变化。 Case comEvRing ' Ring Indicator 变化。 Case comEvReceive ' 收到RThreshold # of chars. Case comEvSend ' 传输缓冲区有Sthreshold 个字符' Case comEvEof ' 输入数据流中发现EOF 字符 End Select End Sub 2.轮循法采集数据: A、定时器轮循法 对于数据包方式收发数据以及不需即时响应情况,用轮循法更好些。实际上轮循法最大的好处在于集中处理数据而且不太占用CPU。轮循法要注意定时采集的时间片段大小;这里用二进制收发模式;使属性RThreshold、SThreshold为0,屏蔽ONCOMM事件。 InputMode = comInputModeBinary RThreshold = 0 SThreshold = 0 Private Sub TmrComm_Timer() '采用轮循法采集数据 (1)pinMode(接口名称,OUTPUT或INPUT),将指定的接口定义为输入或输出接口,用在setup()函数里。 (2)digitalWrite(接口名称,HIGH(高)或LOW(低)),将数字输入输出接口的数值置高或置低。 (3)digitalRead(接口名称),读出数字接口的值,并将该值作为返回值。 (4)analogWrite(接口名称,数值),给一个模拟接口写入模拟值(PWM脉冲)。数值取值0-255。 (5)analogRead(接口名称),从指定的模拟接口读取数值,Arduino对该模拟值进行数字转换,这个方法将输入的0~5V电压值 转换为0~1023间的整数值,并将该整数值作为返回值。 (6)delay(时间),延时一段时间,以毫秒为单位,如1000为1秒。 (7)Serial.begin(波特率),设置串行每秒传输数据的速率(波特率)。在与计算机进行通讯时,可以使用下面这些值:300、1200、2400、4800、9600、14400、19200、28800、38400、57600或115200,一般9600、57600和115200比较常见。除此之外还可以使用其他需要的特定数值,如与0号或1号引脚通信就需要特殊的波特率。该函数用在setup()函数里。 Serial.available() 的意思是:返回串口缓冲区中当前剩余的字符个数。一般用这个函数来判断串口的缓冲区有无数据,当Serial.available()>0时,说明串口接收到了数据,可以读取; Serial.read()指从串口的缓冲区取出并读取一个Byte的数据,比如有设备通过串口向Arduino发送数据了,我们就可以用Serial.read()来读取发送的数据。 while(Serial.available()>0) { data= Serial.read(); delay(2); } (8)Serial.read(),读取串行端口中持续输入的数据,并将读入的数据作为返回值。 (9)Serial.print(数据,数据的进制),从串行端口输出数据。Serial.print(数据)默认为十进制,相当于Serial.print(数据,十进制)。 (10)Serial.println(数据,数据的进制),从串行端口输出数据,有所不同的是输出数据后跟随一个回车和一个换行符。但是该函数所输出的值与Serial.print()一样。 常用函数 数字I/O类: pinMode(pin,mode)数字IO口输入输出模式定义函数,将接口定义为输入或输出接口。串口通讯数据处理算法分析与实现
Arduino编程语言
串口采集数据,表格显示
读取串口数据
matlab串口实时波形显示
VB6 实时 串口通信 数据采集代码
ARDUINO入门及其简单实验7例
基于C++Builder的串口数据实时曲线绘制的实现
第十五课 Arduino 教程-- Arduino IO函数
Arduino BLE 函数库中文
用单片机的模拟串口读取TFmini的数据
arduino语法手册函数部分
VB串口数据接收方式
Arduino常用函数精编版