自动化专业英语教程 PART3
Part 3 Computer Control Technology
Unit 1
A:Computer Structure and Function
A 计算机的结构与功能
这一节介绍计算机的内部体系结构,描述了指令如何存储和译码,并解释了
指令执行周期怎样分解成不同的部分。
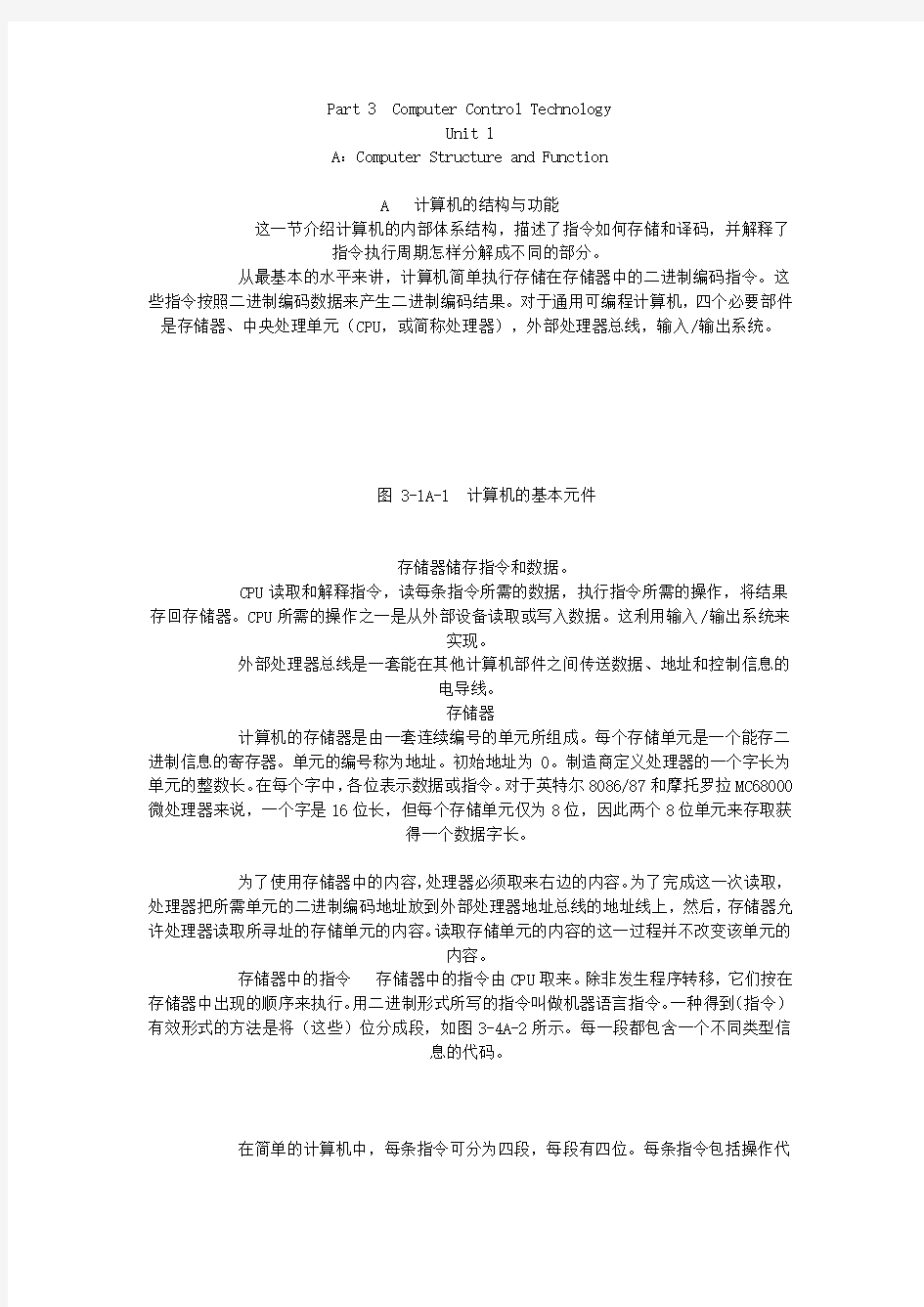
从最基本的水平来讲,计算机简单执行存储在存储器中的二进制编码指令。这些指令按照二进制编码数据来产生二进制编码结果。对于通用可编程计算机,四个必要部件是存储器、中央处理单元(CPU,或简称处理器),外部处理器总线,输入/输出系统。
图 3-1A-1 计算机的基本元件
存储器储存指令和数据。
CPU读取和解释指令,读每条指令所需的数据,执行指令所需的操作,将结果存回存储器。CPU所需的操作之一是从外部设备读取或写入数据。这利用输入/输出系统来
实现。
外部处理器总线是一套能在其他计算机部件之间传送数据、地址和控制信息的
电导线。
存储器
计算机的存储器是由一套连续编号的单元所组成。每个存储单元是一个能存二进制信息的寄存器。单元的编号称为地址。初始地址为0。制造商定义处理器的一个字长为单元的整数长。在每个字中,各位表示数据或指令。对于英特尔8086/87和摩托罗拉MC68000微处理器来说,一个字是16位长,但每个存储单元仅为8位,因此两个8位单元来存取获
得一个数据字长。
为了使用存储器中的内容,处理器必须取来右边的内容。为了完成这一次读取,处理器把所需单元的二进制编码地址放到外部处理器地址总线的地址线上,然后,存储器允许处理器读取所寻址的存储单元的内容。读取存储单元的内容的这一过程并不改变该单元的
内容。
存储器中的指令存储器中的指令由CPU取来。除非发生程序转移,它们按在存储器中出现的顺序来执行。用二进制形式所写的指令叫做机器语言指令。一种得到(指令)有效形式的方法是将(这些)位分成段,如图3-4A-2所示。每一段都包含一个不同类型信
息的代码。
在简单的计算机中,每条指令可分为四段,每段有四位。每条指令包括操作代
码(或操作码,每条指令有唯一的操作码)、操作数地址、立即数、转换地址。
在一个实际的指令集中,有很多指令。也有大量的存储单元来存储指令和数据。为了增加存储单元的数目,如果我们使用同样的方法,地址段的指令一定长于16位。除了增加指令长度外,还有很多增加微处理器寻址范围的方法:可变指令段、多字指令、多寻址模式,可变指令长度。我们不将详细讨论它们。
存储数据数据是存储器中代表代码的信息。为了有效利用存储空间和处理时间,大多数计算机提供了不同长度和表示方法的处理数据能力。能被处理器识别的各种不同表示称作数据类型。常用的数据类型有:位、二进制码、十进制数字(4位字节,BCD)、字节(8位)、字(2个字节)、双字(4个字节)。
有一些处理器提供了可处理其他数据类型。例如单精度浮点数据类(32位)和双精度浮点数据(64位)等的指令。还有另一类的数据–––特征数据。通常也表示为8位。在标准键盘上,每个计算机终端键和键的组合(例如shift和control功能键)有定为
美国信息交换标准码的7位码。
存储器类型在数字控制系统的应用中,我们也关注不同存储技术的特征。对主存储器来说,我们需用它临时存储信息,并逐次地从不同单元写入或获得信息。这种类型的存储器称作随机访问存储器(RAM)。在某些情况下,我们不想让存储器中的信息丢失。因此我们愿使用特殊技术写入存储器。如果写入只在物理改变连接时才能实现,那么这种存储器称为只读存储器(ROM)。如果相互连接的模式可由程序设定,那存储器叫做可编程只读存储器(PROM)。如果需要实现改写的情况,我们有可擦的可编程只读存储器(EPROM)。
电可擦除的PROM缩写为EEPROM。
中央处理单元CPU
CPU的工作是从存储器中取回指令并执行。CPU的结构如图3-4A-3。它有四个主要部件:算术-逻辑单元,一系列存储器,一个内部处理器总线和控制器。
CPU的这些及其其他部件和它们在指令周期的分享将在后面的章节中说明。
算术-逻辑单元(ALU)ALU提供很广泛的算术操作,包括加、减、乘、除。它也完成布尔逻辑操作,例如:与、或、二进制算术求补。其他操作,例如字比较也可达到。
计算机任务的主要部分包括ALU,但为了利用ALU指令,需要大量的数据移动。
寄存器CPU内的一系列寄存器是用于存储信息的。
指令寄存器当一条指令取回来,它被复制到指令寄存器内,并被译码。译码意味着检查操作代码并用于确定执行顺序的各步
CPU的编程器模型可由编程器检查或修改的寄存器集称为CPU的编程器模型。由指令集操作或明显受硬件输入或数据操作的结果影响的一类寄存器是模型中表示的寄
存器。
标志寄存器执行顺序不仅由指令而且也由前面指令的结果来确定。例如,如果在ALU中进行加法运算,加法的结果(不论结果是正、负或0)存储在称为标志寄存器、状态寄存器或条件寄存器中。如果下一指令是一个条件转移指令,标志字需要检验以确定是
否需要转移。
程序计数器(指令指针)下一指令的地址位于称作程序计数器的寄存器中。
数据寄存器当一指令用寄存器存储数据,指令中的寄存器参考被称作寄存器寻址。利用内部寄存器存数据的原因在于它们能使指令更短,执行速度更快。
地址寄存器内部寄存器也可用于储存存储器数据的地址。这种情况下,指令字包含寄存器数(例如一个寄存器地址)。寄存器中包含用于指令中的存储器数据的地址。
这种寻址方式叫做寄存器直接寻址。寄存器的内容指向存储器中的数据。
内部处理器总线内部处理器总线使数据在内部存储器间移动。总线是一套分组的电导线,它能在CPU的功能块间传送数据、地址和控制信息。当两个寄存器连到总线上
时,源寄存器中的数据可传到目的寄存器中。
控制器控制器提供了程序周期内取自寄存器每条指令的控制信号的适宜顺序。一个总程序周期是由许多指令周期组成,每个指令周期可分为它部件的机器周期,每个
机器周期由许多时钟周期组成。
例如图3-1A-4,为了取回一条指令,程序计数器中的地址放到在时钟周期C1上升沿的外部总线的地址线上。同时,利用控制线上的一个代码,CPU通知所有连接到总线上的设备,即CPU正执行一个“操作码取回”的机器周期。存储器允许存储器寻址去选择包含指令的存储器单元。在C2段,控制器将“读”命令放到控制总线上,允许存储器数据放到
数据线上。
然后在C3段,控制器将数据选通到指令寄存器中,并从控制总线再移动读命令。在C4段,控制器在地址总线上再移地址并开始译指令的操作代码部分,来看一看执行需要说明步骤。译码操作或许会在“操作码取回”机器周期的末端花费几个更多的时钟周期。
外部提示请求停止正常的指令处理顺序往往是必要的。一种外部提示请求是复位请求。在不可恢复故障的情况下,计算机系统可要求自身复位。这带来的影响是初始化系统中所有重要寄存器,并从标志存储单元–––通常是0单元开始执行指令。
在正常事件过程中更通常的启动服务是中断请求。来自外部设备的一个中断请求信号可使CPU立即执行实施必要动作的服务子程序。当完成服务子程序后,处理器将从最
初被中断的地方继续执行。
第三种类型的输入是总线请求,或直接存储器寻址请求。有一个终端接口来存储正文的所有特征,直到接到一个“回车”。然后,接口请求使用系统总线,此时,数据以尽可快的速度被传递给存储器。这种方式下,处理器仅变为停止,直到传递完成。
总线
总线是计算机系统最重要的通信系统。在CPU控制下,一个数据源设备和一个数据目的设备被允许在短时传输下连接到总线上。
外部处理器总线内部处理器总线通过位于微处理器集成电路上的一组总线
缓冲区连接到外部处理器总线上。
系统总线微计算机板能够通过一个连接器与外部系统总线相联而能与其他
板进行通信。
计算机输入和输出
CPU外部的一组寄存器是与输入/输出系统有关的。I/O系统在接口处利用控制、地址、数据线通过I/O寄存器来与外部处理器总线连接。有两种方法用于寻址I/O寄存器。
第一种方法,称为I/O映射的输入/输出,操作码本身有专门的I/O指令,寻
址在接口中称为I/O口的标号寄存器。
第二种寻址I/O寄存器的方法给出了位于CPU寻址寄存器范围内的I/O口地址。
这叫做存储器映射的I/O。当然,没有任何存储器单元在同一寻址下作I/O单元。
存储器映射方法的益处之一是存储器寻址方式的全部范围可用于I/O寄存器
寻址。
B 计算机与网络基础
计算机系统的组成
在说明了什么是计算机之后,让我们在来看一下计算机的定义:计算机是一种能接收、存储和处理数据,并能产生输出结果的快速、精确的符号加工系统,这一系统是在存储指令程序控制下工作的。本文说明为什么计算机是一个系统以及计算机是如何组成的。
系统的主要部件包括输入设备、处理机和输出设备。现在详细介绍每一部件。
输入设备计算机系统使用多种输入设备。其中有些输入设备直接进行人-机通信,另一些则首先要求把数据记录在诸如磁性材料那样的输入介质上。常用的是读取以磁化方式记录在专门涂敷的塑料带或软盘上的数据的输入设备。直接输入设备有与计算机的工作站直接连接或在线连接的键盘,以及鼠标器、输入器、触摸式屏幕和话筒等。不论使用哪种设备,所有这些都是人与计算机系统之间的解释和通信的部件。
中央处理机中央处理机(CPU)是计算机系统的核心。一台典型计算机的CPU 由三部分组成:主存储器部分、算术逻辑部分和控制部分。不仅个人计算机如此,各种规模
的计算机的CPU都有这三部分。
输出设备与输入设备类似,输出设备也是人与计算机系统之间的解释和通信的设备。输出设备从CPU中取出机器代码形式的结果,然后将其转换成(a)人们可读的形式(例如打印或显示报告)或(b)另一处理周期的机器输入。
在个人计算机系统中,常用的输出设备是显示屏和台式打印机。比较大型的计算机系统通常要配备更大、更快的打印机,多台在线工作站和磁带机。
有时也将输入/输出设备和辅助存储器称为外围设备,这是因为这些设备不属于
CPU,但又位于CPU附近。
操作系统
操作系统朝着两个主要目标已发展了三十多年。第一,为程序的开发和执行提
供了一个方便的环境。第二,操作系统试图通过对计算任务的调度以确保计算系统的良好性
能。
操作系统必须确保计算机系统的正确操作。为避免用户程序影响系统的正常操作,对硬件进行修改以建立两种方式:用户方式和监控方式。各种指令(如I/O指令,HALT 指令)被赋予特权,只能在监控方式中执行。监控程序存放在内存,同样业应避免用户对其修改。另外采用一个时钟避免无限循环。这样,一旦基本的计算机系统发生了变动(两种方式,特权指令,存储器保护,时钟中断),仍有可能写出正确的操作系统。
正如我们前面所说,操作系统对于生产它们的厂家及其运行的硬件环境通常是唯一的。一般,安装一台新计算机的同时购买了与该硬件相应的操作系统。用户需要有效地
支持其处理任务的可靠操作软件。
尽管各厂家的操作软件各不相同,但都具有类似的性能。现代硬件系统,由于其复杂性,需要有操作系统来满足某些特定的标准。例如,考虑到该领域的现状,操作系统应支持某种形式的联机处理。通常,与操作软件相关的功能有:
作业管理;
资源管理;
I/O操作控制;
错误恢复;
存储器管理
计算机网络
分布式计算机系统间需要进行通信有许多原因,例如在一个国家内,处于各地的计算机使用公共通信设施交换电子信息(邮件),从一个计算机向另一个计算机传送文件。
同样,在一个局部区域内,例如在一个大楼或机关内,分布式的计算机工作站间使用局部通信网络访问昂贵的共享资源,例如打印机、复印机、磁盘和磁带等,这些设备也由计算机管理。很明显,随着基于计算机的产品和相应的公共和局部通信网络的激增,计算机-计算机通信也将得到迅速的发展,最终将在分布式系统中占统治地位。
虽然相互通信的计算机间的实际距离因应用类型不同有很大变化,但一般来讲,任何一个计算机通信网络的核心数据通信设备,这些设备可以是PSTN,专用LAN或很多这种网络的互联系统。但是如果不考虑数据通信设备的类型,那么为处理相应的与网络有关的协议,需在联网的计算机上配备很多硬件和软件。一般来讲这些都与跨网通信信道的建立,与通过该信道的信息流控制有关。提供这种设备仅是网络要求的一部分,但是在很多应用中,通信的计算机类型可以不同。这表面它们可以使用不同的编程语言,而更重要的是可以使用不同的操作系统,因而用户应用程序(通常叫做应用处理程序或AP)与基本通信服务程序之间的接口也不同。例如,一台计算机可能是小型单用户机,而另一台可能是大型多用户系
统。
Unit 2
A: Interface to External Signals and Devices
自治的外部设备和信号由于没有与总线兼容的信号也没有与系统总线信号的暂时关系(注:实际上是指没有暂存器)就无法与系统总线直接相连。与系统总线的通信是由输入输出接口来完成的。输入输出接口的主要目的是将数据在处理器与独立的外部设备之间转换并将数据按为处理器能识别的方式进行转换。接口的其他功能包括:电气绝缘、信号放大、噪声去除、数据暂存或者数据格式转换。
在某些情形,使用如图Fig. 3-4B-2所示的握手信号(用于请求、允许和转换的信号序
列)是必须的。一旦信号是可用的,外设就会关闭信号可用线并将数据选通至接口。同时,状态寄存器给出‘就绪’标志,通知CPU数据已经可用。为了得知外设是否就绪,CPU必须不停地轮询接口(读状态寄存器)并最终锁存数据。
随着高精度转换器发展就产生了双积分模数转化器。在该种转换器中,一个未知的正值(常数)输入电压U i加至一个电子积分器上,该积分器从零电压开始积分,时间为固定的T,从而产生一个斜率与U i T成正比的正向斜坡电压。然后去掉U i,对一个已知的负常值参考电压U积分一产生一个下降的斜坡。这第二个斜坡信号从参考电压作用时算起在U i T/ U 秒过零。这个时间通过一个高速计数器来测量,由于T和U都是常数,计数器所计的数就与输入电压成比例。如果输入电压等于参考电压,,两个积分时间就相等,计数器就达到最大值。这种转换器通常线性度很好,转换精度达到20位,但是转换时间相对比较长。
在高速转换性能的范围内,并行(闪速)转换器可以提供高达100MHz的转换速率。该
N 的电压提供一个内部参考电转换器的实现原理是,为每一份量值为输入模拟电压除以21
压。输入模拟信号立即与所有的参考电压通过一串高速比较器进行比较,高速比较器用于产生二进制输出。由于该类型的A/D所需要的元件的数量比较多、要求的质量比较高,通常都是8位或者更低位。闪速转换器通常比较昂贵。
在模拟量转换系统中在模/数转换器的前端通常都会有一个采样-保持电路。在逐次逼近转换器中一个固定的输入特别重要,因为在一个转换周期中输入要和参考值比较好几次。
如图Fig. 3-4B-5所示的多路开关在概念上如同一个旋转开关,在处理器的控制下可以旋转寻址任意一个输入通道。多路开关可以用机械开关或者固态器件(例如CMOS)开关构成。多路开关的输入端可以有多种输入连接方式,例如单端连接或者差分连接。当信号值是相对地而言的,则使用单端连接。当我们对两个电压的差感兴趣时(例如一个应力传感器桥的两个桥臂的电压差)则使用差分连接。
B: The Application of Computer
计算机取代了过去是需要人的特殊技巧和知识的工作。例如,控制生产过程、操纵机器、检查产品质量、生产计划管理和库存管理等等,一切都是自动的且效率和精度都很高。在数控系统、PID控制系统、伺服系统、群控系统、最优和自适应控制系统中,计算机都是作为一个中心控制单元,进行与过程自动控制有关的各种运算并对系统中的其他单元进行调度。CIMS(计算机集成制造系统)不仅包含生产控制系统而且还包含了生产规划和管理系统,其目标是集成工厂自动化(FA)和办公自动化(OA)并为整个公司构成一个计算机网络。HIMS(人集成制造系统)是计算机控制的一种高层形式。虚拟现实技术通过使用高性能计算机以及特殊的软件来为操作员创立一个虚拟的空间。
虚拟的计算机仿真是建立在能够代表要研究或检查的对象的数学模型之上的。该数学模型包含了一组描述了对象内在过程的数学方程。一个计算机仿真程序包含了从以上方程推导出来的算法。许多的计算机仿真系统已经开发出来并且证明是性能价格比高的。之所以这样,是因为通过使用计算机仿真,工程师们可以反复地运行过程,每次输入不同的策略和参数(进入计算机模型)而无须构造真实的模型。
机器人中的控制器大多数情况下都是计算机,从微处理器到小型计算机。数字控制与伺
服控制被广泛使用。他们都可以重复编程,以产生一系列的指令用于机器人的动作与行为。例如。控制器将系列脉冲送到机器人手臂关节的步进电机使其转动如程序所要求的角度。当所有的关节都用该方法驱动,机器人就可以达到所希望的位置和姿势。且终端执行机构就如控制器所指示的那样工作。动作的精度由控制器来决定。
CAD是这样的软件,可以帮助工程师设计新产品、建筑、印刷线路板、桥梁和机场等土木工程;使他们从绘图等繁琐、累人和费时的工作中解脱出来。当工程师们着手设计时,他们要参考很多的有关结构、零件、材料和辅助材料的手册以作为他们设计的选择。CAD产品将以上内容的手册放在一系列的软件库中,因此可以给工程师提供各种信息,例如,元件、部件、工具和材料的名称、尺寸、功能、性能、规格、形状、颜色、制造商、价格等,所有这些都是工程设计所必须的。
CAM是工程师们用于分析产品和项目的软件,它能给出制造或者构造产品或者项目的建议。表示产品形状、尺寸、结构、组成和制造材料的数据、图形和表格等将按软件的需求输入。接着,CAM软件将给出加工的建议,例如,加工程序、加工所用的工具与设备、技术参数(如,公差、加工精度)以及特殊处理过程等。
人工智能(AI)是计算机科学的一个分支。其目的是提出一定的理论和方法以创建“智能”计算机程序,这些计算机程序象人一样工作,而不是使使用者囹于呆板的计算机为中心的工作方式。从模拟的意义上来说,将人类智能加在计算机程序中使其具有更广泛的能力,例如,思考、推理和获取知识,并将其用于解决目前计算机所不能解决的更复杂、更困难的问题。
专家系统是人工智能领域最为成功的例子。一个专家系统面向人类专家的特殊的专门工作并能提出建议以解决用户给出的问题。专门的知识组织在知识库中供用户检索。当今,已经有许多的商业专家系统且还有许多正在开发。
UNIT3
A PLC概述
许多不同的过程控制系统的自动化,如控制生产机械或工厂生产线,由被称为可编程逻辑控制器(PLC)的小型计算机完成。1968年,通用汽车公司首创PLC并应用于汽车工业,并开发第一个PLC工程,用电子控制器替代硬接线的继电器系统。
-
随着PLC的出现,工厂过程控制的集中化,尤其在汽车工业中,得到了大幅提高。
PLC 的架构
PLC是一个无盘的紧凑计算机,包含所有过程控制必需的软硬件。他们通常用于自动化控制应用(如闭环控制),可以独立存在,也可以连到分布I/O,其他PLC或者监控计算机。这些连接通过现场总线建立,如WorldFIP, PROFIBUS 或者 Ethernet.
典型的PLC包含:
电源
程序运行的CPU
输入输出模块
可选通信模块
可用IO模块支持很多电气接口:
模拟模块 (+/- 10V, +/- 1V, 4-20ma, 电阻,等)
温度测量 (pt100, Ni 100, 等).
数字模块 (+/- 24V, 220V, 等.)
TTL 模块 (Beckhoff I/O 模块, 等.)
RS 232 模块
其他
这些模块可以连接到PLC的内部总线上,也可以通过总线连接器和现场总线单元(如PROFIBUS, WorldFIP or CAN)连接,并于其他PLC共享总线。
用户的硬件很难和PLC内部总线直接连接。解决的方案是使用特定接口卡(如HMS的AnyBus卡)作为标准现场总线接口(如PROFIBUS, CAN, and WorldFIP)集成用户硬件。
现在,PLC提供基于以太网的通信。尽管基于TCP/IP 和 IEEE 8
02.
2,每个厂商的PLC协议都不同。因此,默认情况下,不同厂商的PLC不能通过以太网交换数据。但是,施耐德的的PLC拥有接口库,可以用西门子PLC实现RFC10 00,也可以使用OPC DX服务器,SCADA应用,或者特定通信接口卡,如APPLICOM one,作为网关。
基于PLC的方案可以很好用于两层控制体系架构中,前端层独立于监控层。过程控制(输入输出,读出,闭环控制等)既不依赖于网络,也不依赖于远程电脑,它更为安全。
PLC具有长期可用性,并得到支持:通常情况下,老的软硬件可以得到各自制造商的至少10年的支持。
PLC 操作
PLC使用制造商提供的特定操作系统。操作系统处理:
CPU状态 (开始,停止,初始化, 等);
用户程序的调用
中断
内存
和编程设备和其他通信设备通信
PLC采用轮询的方式执行精确的循环。循环包括连续执行的三部分(如图3-3A-2所示):读输入状态。PLC内核读取所有输入模块,并把数值复制到内部输入内存区域
执行用户程序状态。PLC内核访问所有PLC内存区域,执行用户程序。并把执行结果存贮在内部输出内存中。
写输出状态。PLC内核复制内部输出内存内容到输出模块。
源代码由供应商特定的集成开发环境生成。通常他们由一系列工具组成:
设置管理应用
设置分配硬件参数
设置总线和连接设备
设置通信链路
为PLC创建用户程序
下载程序并测试
用户程序可以用国际电工委员会的IEC 1131-3推荐的五
种语言中任何一种完成。IEC 1131-3是一个试图在一个国际标
准之下涵盖PLC编程语言的世界标准。它通过对编程接口的标准
化,协调人们看待工业控制的方式。包括用来构建程序内部组
织的顺序功能图定义和其他四种内部操作语言:梯形图、功能
框图、结构文本和指令表。前三种语言是图形化的,后两种是
文本的。每个生产商都有自己的专用语言。
通过模块化和变量的定义,每个程序都得以结构化和简化,增强了可用性。此外,IEC 1131-3定义了控制系统的组态方式。但是,在语言方面有些不同。源代码并非100%兼容。主要问题在于硬件寻址和PLC 内核(操作方式,如何处理中断,如何调用用户程序等)大多数PLC 供应商属于PLCopen 组织,它是一个独立于生产商和产品的世界协会,致力于通过寻求IEC 1131-3开放软件开发标准,为PLC用户带来更多的价值。
今天的 PLC
随着PLC 技术的发展,编程语言,通信能力和其他很多性能都进一步提高。现在的PLC 提供了更快的扫描时间,更高效的利用内存空间,高密度的I/O系统和非传统设备直接连接到PLC的特殊接口。它们不但可以和其他控制系统进行通信,还具有执行报告功能,诊断自身、机器或过程的故障。
通常用大小来对现在的PLC进行分类,它标志着适用的具体应用的特点和类型。小型化的,非模块化的PLC,也被称为固定IO的PLC,通常内存更小,适合I/O数量不多的固定场合中。模块化PLC拥有背板或导轨,可以用来安装多个I/O模块,适用于更复杂的应用中。
PLC具有如此多的优点,显而易见,它们已经成为一个工业标准,并将在未来继续它们的辉煌。
面,从I/O读写速率到控制器上各个线程的优先级。
B PAC?新一代工业控制系统, 可编程自动化控制的未来
随着许多厂商已生产出能结合PC功能和PLC可靠性的可编程自动化控制器(PAC),目前控制系统已逐渐开始采用PAC。本白皮书介绍PAC的起源以及它与PLC和PC的区别,并指出了使用PAC的工业控制未来发展方向。
PAC将成为未来的工业控制方式
和基于PC控制系统相比,有关PLC(可编程逻辑控制器)优势和劣势的激烈争论已经持续了十年。由于PC和PLC在技术上的差别越来越小,并且随着PLC采用了商业化(COTS)硬件以及PC能采用实时操作系统,从而出现了一种新类型的控制器??PAC。PAC的概念是由自动化研究机构 (ARC) 提出的,它表示可编程自动化控制器,用于描述结合了PLC和PC 功能的新一代工业控制器。传统的PLC厂商使用PAC的概念来描述他们的高端系统,而PC 控制厂商则用来描述他们的工业化控制平台。
在PLC被开发出来的三十年里,它经过不断地发展,已经能结合模拟I/O,网络通信以及采用新的编程标准如IEC 61131-
3。然而,工程师们只需利用数字I/O和少量的模拟I/O数以及简单的编程技巧就可开发出80%的工业应用。来自ARC、联合开发公司(VDC)以及网上PLC培训资源https://www.360docs.net/doc/5e16247199.html, 的专家估计:
77%的PLC被用于小型应用(低于128 I/O)
72%的PLC I/O是数字的
80%的PLC应用可利用20条的梯形逻辑指令集来解决
由于采用传统的工具可以解决80%的工业应用,这样就强烈地需要有低成本简单的PLC;从而促进了低成本微型PLC的增长,它带有用梯形逻辑编程的数字I/O。然而,这也在控制技术上造成了不连续性,一方面80%的应用需要使用简单的低成本控制器,而另一方面其它的20%应用则超出了传统控制系统所能提供的功能。工程师在开发这些20%的应用需要有更高的循环速率,高级控制算法,更多模拟功能以及能更好地和企业网络集成。
在八十和九十年代,那些要开发“20%应用”的工程师们已考虑在工业控制中使用PC。PC所提供的软件功能可以执行高级任务,提供丰富的图形化编程和用户环境,并且PC的COTS 部件使控制工程师能把不断发展的技术用于其它应用。这些技术包括浮点处理器;高速I/O
总线,如PCI和以太网;固定数据存储器;图形化软件开发工具。而且PC还能提供无比的灵活性,高效的软件以及高级的低成本硬件。
然而,PC还不是非常适合用于控制应用。尽管许多工程师在集成高级功能时使用PC,这些功能包括模拟控制和仿真、连接数据库、网络功能以及和第三方设备通信,但是PLC 仍然在控制领域中处于统治地位。基于PC控制的主要问题是标准PC并不是为严格的工业环境而设计的。
PC主要面临三大问题:
稳定性:通常PC的通用操作系统不能提供用于控制足够的稳定性。安装基于PC控制的设备会迫使处理系统崩溃和未预料到的重启。
可靠性:由于PC带有旋转的磁性硬盘和非工业性牢固的部件,如电源,这使得它更容易出现故障。
不熟悉的编程环境:工厂操作人员需要具备在维护和排除故障时恢复系统的能力。使用梯形逻辑,他们可以手动迫使线圈恢复到理想状态,并能快速修补受影响的代码以快速恢复系统。然而,PC系统需要操作人员学习新的更高级的工具。
尽管某些工程师采用具有坚固硬件和专门操作系统的专用工业计算机,但是由于PC可靠性方面的问题绝大多数工程师还是避免在控制中使用PC。此外,在PC中的用于各种自动化任务的设备,如I/O、通信、或运动可能需要不同的开发环境。
因此那些要开发“20%应用”的工程师们要么使用一个PLC无法轻松实现系统所需的功能,要么采用既包含PLC又包含PC的混合系统,他们利用PLC来执行代码的控制部分,用PC来实现更高级的功能。因而现在许多工厂车间使用PLC和PC相结合的系统,利用系统中的PC进行数据记录,连接条码扫描仪,在数据库中插入信息以及把数据发布到网上。采用这种方式建立系统的主要问题是该系统常常难以构建,排除故障和维护。系统工程师常常被要结合来自多个厂商软硬件的工作所困扰,这是因为这些设备并不是为了能协同工作而设计的。
构建更好的控制器
由于没有适合的PC或PLC解决方案,那些需要开发复杂应用的工程师就和控制厂商密切合作开发新的产品。他们需要新产品能结合PC的高级软件功能和PLC的可靠性。这些重要用户为PLC和基于PC控制的公司提供了产品开发指导。
实现软件的功能不仅需要有高级的软件,而且控制器的硬件功能也需要有所提高。由于世界范围内对PC部件的需求在下降,所以许多半导体厂商开始为工业应用重新设计他们的产品。目前控制领域的厂商已开始在工业控制产品中使用工业化浮点处理器、DRAM、固态存储器如CompactFlash以及快速Ethernet芯片。这使得厂商能利用基于PC控制系统的灵活性和可用性来开发更为强大的软件,而且该PC控制系统还可运行实时操作系统以保证可靠性。
这种新的控制器是为解决“20%”的应用问题而设计的,它结合了PLC和PC两者的优点。ARC的工业分析家把这种设备称为可编程自动化控制器,即PAC。在ARC的“可编程逻辑控制器世界概览”研究中,他们给出了PAC的五个主要特性。这些控制器特性是通过定义软件的能力来实现其功能的。
1.“多功能性,在一个平台上有逻辑、运动、PID控制、驱动和处理中的至少两种以上功能。”除了为了实现特殊的协议如SERCOS要对I/O做一些改进;而且软件还能提供逻辑、运动、处理和PID的功能。例如,运动控制作为软件控制循环,它能从正交编码器上读取数字输入,执行模拟控制循环并输出控制设备的模拟信号。
2.“单一的多规程开发平台使用通用标签和单一的数据库来访问所有的参数和功能。”由于PAC是为更为高级的应用如多功能而设计的,他们需要更为高级的软件。为了能高效地设计系统,软件必须是单一的集成化软件包,而不是多种分离的软件工具,这些软件工具在工程上不能无缝地协同工作。
3.“通过结合IEC61131-
3,用户向导和数据管理,软件工具能设计出在跨越多个机器和处理单元的处理流程。”简化系统设计的另一方面是具有高级的图形化开发工具,利用该工具可以使工程师很轻松地把处理的概念转变为能实际控制机器的代码。
4.“开放的模块化构架能解决的工业应用可从控制分布于工厂机器到加工车间的操作单元。”由于所有的工业应用都需要有高度的定制特性,所以硬件必须是模块化的以便工程师们可以选择合适的部件。而且,软件也必须能让工程师增加和拆除模块以设计出所需的系统。
5.“采用已有的网络接口标准,语言等,如TCP/IP,OPC&XML和SQL查询语言。”能和企业的网络通信对于现代化控制系统是非常关键的。尽管PAC包含有以太网接口,但是为了要把设备和工厂其它系统无问题地集成在一起,通信软件是至关重要的。
两种不同的软件解决方案
一方面软件是PAC和PLC主要的区别,而另一方面厂商在提供高级软件的方式上也有所不同。通常他们以目前已有的控制软件作为起点,不断增加PAC编程所需的功能、可靠性和易用性。一般说来,有两种提供PAC软件的方式:基于PLC控制的软件和基于PC控制的软件
基于PLC概念的软件方案传统的PLC软件厂商以可靠且易用的扫描式架构软件为起点,并逐渐增加新的功能。PLC软件根据通用模型而建立:输入扫描,控制代码运行,输入更新,以及常规功能执行。由于输入循环,输出循环和常规循环都是隐藏的,所以控制工程师只需关注控制代码的设计。由于厂商已完成了大部分工作,这种严格的控制架构使得建立控制系统更为容易和快速。这些系统的严格性也能让控制工程师在开发可靠的程序时无需深入了解PLC的底层操作。然而,作为PLC主要优势的这种严格的扫描式构架也导致其灵活性的欠缺。
-
绝大多数PLC厂商通过在已有的扫描式架构中增加新的功能来建立PAC软件,这些新功能包括以太网通信,运动控制和高级算法。然而,通常他们会保留PLC熟悉的编程方式以及其在逻辑和控制方面固有的特点。因此这种PAC软件通常是为了适合特殊类型应用而设计的,如逻辑,运动和PID,但是对于定制的应用则缺乏灵活性,如通信、数据记录或定制的控制算法。
基于PC概念的软件方案传统PC软件厂商以非常灵活的通用编程语言为起点,能提供对硬件的深层次访问。该种软件也具有可靠性、确定性以及预设的控制架构。尽管工程师能为PLC编程人员建立起扫描式构架,但是它并不是基于PC的软件所固有的。这些使得PC 软件极为灵活,非常适合那些需要高级的架构、编程技巧或者系统级控制的复杂应用,但却使本应简单的应用复杂化。
这些厂商首先要能提供通用操作系统如Windows所不具备的可靠性和确定性。它们可以通过采用实时操作系统(RTOS)如来自Ardence的Phar Lap或Wind River的VxWorks来实现。这些RTOS能控制系统的各个层面,从I/O读写速率到控制器上各个线程的优先级。然后为了使工程师能更为容易地开发出可靠的控制程序,厂商增加了抽象层和I/O读写架构。
因而这种灵活软件非常适合于定制控制,数据记录和通信,但舍弃PLC编程架构的代价是使程序的开发难度增加。
UNIT 4
A 单片机基础
单片机是本世纪两大引起争论的重大发明创新即数字计算机与集成电路发展的
顶点。
单片机有这样两种结构类型。一些使用了哈佛结构的分离的程序/数据存储器,另一些被通用计算机和微处理器广泛采用的是普林斯顿结构,遵循在程序存储器与数据存储
器之间没有逻辑区别的原理。
概括地讲,单片机的特征是将计算机的所有部件都合并到一个单一的装置上。
只读存储器(ROM): ROM通常用于永久的、不易变的应用程序的存储。许多
微计算机和微控制器要有大量应用场合,因此这些设备的生产要求在制造过程中,程序存储器中的内容要保证长久不变。显然,由于在生产后不能产生变化,因此这意味着要有一个ROM代码开发的严格的方法。这一开发过程不仅包括利用其硬件仿真能力的复杂开发系统的
仿真,还包括强大的软件工具的应用。
一些生产商提供了包括带用户可编程存储器范围内设备的附加ROM可选项。其中最简单的设备是在微处理器模式下运算,把一些输入/输出线用作地址和数据总线来访问外部存储器。虽然带有限定I/O和改进的外部电路,但这种类型的设备能够像单片机派生的功能那样工作。这些无ROM设备的应用在生产电路中通常是偶数,其容量不能调整、定制的单片ROM的开发成本;但与传统的基于电路的微处理器相比,在I/O和其他芯片上仍有很大
的节省。
ROM设备的更精确的替代可通过不同形式的带有背页式EPROM(可擦写编程ROM)插座
或由EPROM取代ROM的设备而获得。这些设备本质上比相等的ROM设备要昂贵,但确实提供了完全等效的电路。带EPROM的设备时少量的应用场合具很大诱惑,它们可提供单片设备的优点,单片I/O,等等,以及灵活的用户编程的方便性。
读/写存储器(RAM):RAM是用于程序执行过程中对对工作变量和数据的存储。存储器的大小随设备的类型而变,但它与处理器有相同的特征宽度(4,8,16位等)。特
殊功能寄存器,例如栈指针或定时寄存器通常合并到RAM区。在哈佛类型的微计算机中,RAM 和寄存器常常没有实际分离,因此在一个微处理器系统情况下,没有必要把RAM和处理器寄
存器区分开。
中央处理单元(CPU):CPU更象任何一种微处理器。微计算机和微控制器的许
多应用包括BCD码的处理(例如,数据显示),因此,普遍发现CPU能很好地处理这一类型的数据。由于许多控制器的应用包括开或关单个输出线或读取单个线,因此对测试、设定和复位存储器或I/O的独立的位,它们通常也是很好的设备。这些线很容易与双套设备来接口,例如:开关,恒温器,固态继电器,阀,电动机,等等。
并行输入/输出:具有终端设备的串行通信通用的方法是用少量的线进行连接。这种通信业可开发用于连接特殊功能的芯片或将几个微计算机连在一起。公用异步和同步通信系统要求协议能提供成帧(开始和停止)信息。这可由硬件设施或U(S)ART(通用(同步)异步接收/发送器)来使处理器从低电平、占时、细目中解脱出来。仅需选择一个波特率和其他可能的选项(停止位的数目,奇偶检验,等等)以及装载(或读取)串行发送器(或接
收器)的缓冲区。相应格式的串行化再由硬件电路来完成。
定时器/计数器设备:单片机的许多应用技术要求有精确估计所经过的时间。这可经仔细评定程序每一分支的执行时间来确定,但这很快会变为全部无效,除了最简单的程序。较合人意的方法是,用定时电路来精确独立计算精确的时间增量,经过一段预定时间后,产生一个中断。这种类型的定时器通常被安排去预载所要求的计数值。然后,定时器减小这一数值,当计数器减小为0时,产生一中断或设置一个标志。较好的定时器有自动再加载初始计数值的能力。这使程序员从再加载计数器和存取定时器再启动前所经过的时间的责任中
解脱出来。
如果需要连续精确的定时中断,否则,这是必要的(例如,在一个时钟内)。有时与定时器相关的是事件计数器。这一设备通常有一特殊输入针,它可直接驱动计数器。
定时元件:大多数微计算机的时钟电路只需要简单的定时元件。若要达到最大性能,必须用一个晶体来保证达到最大时钟频率,而不是超过。许多时钟电路也把电阻和电容用作低成本定时元件或由外部源来驱动。如果微计算机的外部需要同步的话,这后一种方
案是很有用的。
B 了解数字信号处理器和它的用途
数字信号处理器(名词)
数字信号处理器是一种超高速单片计算机,它已被优化以用于一些现实信号如语音、视频、音乐等等的实时检测、处理和产生。它通常在一块单芯片或一块集成电路的一部分中实现,大小大约是0.5-4cm2 ,价格在3-300美元之间,在每台移动电话、MP3播放器和大多
数汽车上都有它。
与之比较,微处理器(我们可能都比较熟悉的术语)是一个传统意义上能力很差的计算机,它在后台执行任务,常常控制其他设备一例如键盘入口、中央供热、洗衣机的旋转等等。说到这里,一块奔腾3芯片与其说是一个DSP 不如将其归类到微处理器系列去,然而它以超过1GHz 的速度运行,这不能说能力很差。
当前,微处理器和数字信号处理器两者的任务界限已经变得模糊了-也许协同工作会更好.现在很多所谓的数字信号处理器有微处理器的功能,而许多所谓的微处理器在工作时又有数字信号处理器的功能。要按应用来分辨DSP与微处理器可能不是最好的方法。实际上,它们两者主要的不同存在于它们的内部芯片结构。DSP 器件对高速、高精确度的乘法进行了
特殊的优化。
数字信号处理(动词)
数字信号处理就是处理真实世界生成的信号或者处理即将输出到真实世界的信号,这些信号用数字表示。也就是说 ,DSP的完整应用有两部分:从真实世界信号(模拟语音、音乐、视频、引擎速度、地震)到数字信号处理器所能处理的数字值的转变,即模/数变换过程。从DSP所产生的数字值到现实信号的模拟值的数/模变化。这个过程如图3-5B-1所示。
对数字信号处理而言,最根本的是,任何真实世界的信号如音乐信号,都能精确地由它的周期采样值表示(Nyquist对这个规律总结了一个公式)。这些采样样本能够转变成数字形
式(例如在这个采样点表示音乐的音量),这些数字能用二进制的形式表示。我们现在生活在计算机和软件的世界中,在这个世界中,二进制数字的处理就好比是面包和黄油,不可缺少。
如果我们用同一个量对所有数值进行缩放,然后把它们转变成电压样值去驱动耳机或者扬声器,就实现了一个DSP的音量控制。从另一方面来说,如果用不同的量来缩放这些样
值,这就实现了一个简单的音频FX处理器。
对数字信号处理而言,这些只是非常简单的任务,甚至还没开始利用它的处理能力。一个更具挑战性的例子是图解均衡器。它按照频率来改变音乐源各个分量的音量.应用一个图解均衡器需要使用滤波器变换来把信号分离到各个频带,分别标度每一个滤波段,然后把每
一段加起来后送到输出端。
数字滤波对一个DSP来说轻而易举,但是实际上涉及到相当多的计算。例如,保存连续的样值,并对每一个值进行单独缩放,然后求和来完成即使是最简单的滤波器功能。为执行任务,数字信号处理器和它的指令集被优化过(这是DSP与微处理器的不同之处), 在大部分DSP器件上,仅仅使用三行代码就能真正地实现这个功能。
数字信号处理器简史
在20世纪60年代,DSP硬件使用分立元件,因为价格高和体积大,它的应用仅仅可能是为非常特殊的要求作验证(或者庞大的预算研究程序)。在70年代,出现了一些 DSP子系统的单片集成电路,主要用于数字乘法器和地址发生器(见第3章),并且使用位片微处理器可以实现DSP系统。DSP技术开发的突破出现在1979 年,当时Intel发明了2920,这是一片40针DIP封装完整的信号处理器件,带有片内程序EPROM、数据RAM、A/D和D/A 转换器, 并且它的结构和指令集非常强大,足以应用于一个全双工的1200bps的调制解调器。紧接着,1982年德州仪器公司在市场投放了TMS32010 。
从Intel2920开始,一共出现了五代通用信号处理器件,第六代也已被发布。最新一代数字信号处理器件的处理能力是早期2920器件处理能力的100000倍,所有这一切只用了
20年的时间。
今天,所有主要的半导体器件厂家都已经发布了或者正在开发DSP产品。这反映了从20世纪80年代后期到现在21世纪,他们对DSP器件需求量出现巨大增长充满信心。这与20世纪70 年代微处理器取得伟大成功的历史意义是相同的。
在开始进行信号的数字化处理中,语音分析曾是DSP发展的驱动力。在语音处理系统里,使用模拟技术,滤波器对误差的苛刻要求就得不到保证,这主要由于模拟技术存在温度漂移、元件误差和老化等问题。与之相比,数字处理运算只不过是对二进制数字进行乘、加、减等等,得到的结果完全可预测和可复制。再加上使用单个低功率器件,就能完成多重模拟处理的任务,这是DSP成为几十亿美元产业的原因。
DSP用在哪里
表3-4B-1列出目前DSP的许多应用
PC 调制解调器例子
为了简短回答怎样使用DSP这个问题,我们先来看看用于PC的调制解调器。图3-4B-2 概括了传输模拟信号的电话电缆、实时信号处理的DSP和非实时信号输入、显示和
存储的计算机之间的差别。
在这个例子中,首先我们看调制解调器的调制(发送)部分,要用 DSP 处理的数据已经是数字形式的,如一个E-mail文件、一个编码的数据文件等等。DSP的任务是把信息的二进制形式转换成适合在电话线中进行传输的形式。不像电脑与打印机之间的连线,电话线不能直接传递二进制数据1和0,至少因为电话线的抗干扰部分是交流耦合的(DC电源通过同一对线加到电话上)。DSP将数据组转换成符号。这些符号是一个载波信号的离散的幅度和相位值,该信号的频率在1800Hz处。在生成这些符号的过程中,用专门的滤波器完成已调信号的整形,以便让尽可能多的数据能够压缩进带宽有限的电话信道。已滤波的符号波形的数字样本通过一个数模转换器和一个抗混叠滤波器(见第4章)进入电话线。
在电话线的接收端,模数转换是DSP部分的入口,在这里,波形被进一步滤波,以去掉电话线里的噪声。在这个阶段, 通常要执行均衡操作,以补偿电话线里的信号衰减和延时。均衡采用自适应滤波器的形式,它按照链路的响应来调整它的特性值。要是没有DSP
技术,这个功能就不可能实现。
下一个任务是把符号转换成数据比特组,在把数据传回PC数据总线前,需要进行检错
和纠错。
一片只要3美元的DSP就能完成所有的调制解调过程。实际上,最新的DSP器件能在单片中同时实现128路调制解调。这些超级DSP芯片广泛应用于电话交换机和Internet 服
务商(ISP)的调制解调器库中。
UNIT 5
A 初识嵌入式系统
概述
现在像嵌入式这样的术语越来越流行。我们被无处不在的嵌入式系统淹没。现在,问题是,从根本上说,嵌入式系统是什么?我们可以把嵌入式系统定义为“看起来不像计算机的基于微处理器的系统”或者可以说“设计用来执行特定功能的计算机硬件、软件和附加的机械的或者其他部件的结合。在一些情况下,嵌入式系统实大型系统或者产品的一部分,
如汽车中的防抱死系统。”
嵌入式系统包含很多硬件和软件,它们执行宿主系统的特定功能,例如,卫星,
洗衣机,机器人,手持电话和汽车。
调制解调器,硬盘驱动器,软盘驱动器和声卡都是嵌入式系统。每个设备都包含处理器和软件,并执行特定功能。例如,调制解调器用来通过模拟电话线发送和接收数字数据。其他设备也都可以用一句话来概括。如果嵌入式系统设计精良,用户可以完全忽略处理器和软件的存在。这样的例子包括微波炉,录像机或者闹钟。在一些情况下,甚至可以制
造功能相同的设备而不包含处理器和软件。
嵌入式系统的特性
当嵌入式系统进入发展阶段,它们变得越来越复杂。此外,这些系统不断增加的新特性具有智能化的特点。嵌入式设备不但能完成工作,而且能够智能地工作。这些特性
是:
计算能力:这些设备具有一定的计算能力。非常简单的8位控制器或者高端64位微处
理器都能提供这样的计算能力。
内存:下一个是内存。这些设备拥有处理器使用的一定数量的内存,其他一些内存用来
存储用户数据和参数选择。
实时性:所有设备必须在规定时间周期内,对用户/环境的收入做出反应。
通信:设备必须能够接受外部其他设备的输入,进行处理并为其他设备或用户提供可靠
的输出。
动态决策:根据外部环境或传感器的输入变化,系统应该能够改变下一步行动。
嵌入式系统应用
在我们日常生活中,嵌入式系统是那些隐蔽却很重要的应用。它们是小巧、迅捷、智能的微处理器,存在于打印机,电话答录机,电梯,汽车,点钞机,电冰箱,自动调温器,腕表甚至烤箱中。嵌入式系统是消费电子中最先进的技术,它们的“智能化”将彻底
改变各种技术。
嵌入式系统应用描述了不同应用中嵌入式系统设计的最新技术。这包括了嵌入式系统设计总最新一些软件工具。嵌入式系统的一些实例如下:
自动柜员机
计算机用打印机
磁盘驱动器
移动电话和电话交换机
飞行器和导弹用惯性导航系统
医疗设备
游戏机
使用PLC处理自动控制和监控的工业机械
汽车用发动机控制计算机和防抱死控制器
腕表
家用电器,包括微波炉,空凋,电烙铁,洗衣机和电视机
家用自动化产品,如自动调温器,喷洒器和安全监视系统
网络设备,包括路由器和防火墙
交通控制,智能交通灯
音乐系统
读卡器
嵌入式系统的好处
以上面的例子为参考,我们看到这么多的系统在为人类服务。不管这些好处是涉及到安全,还是人们的舒适性,实际上,这些智能系统在生活的每个方面都在帮助人们。它们帮助人们开发新技术。嵌入式处理器使得公司在产品和服务上创新,增加产品和服务特色,为用户创造价值,如果没有这种技术,用户价值是不可能实现的。根据市场研究人员的分析,消费者喜欢做事“机灵”的电子设备,如通过红外线向其他设备发送指令;通过编程自动控制和与卫星等相关的超级技术,把远处能量带到身边。这样的系统使得生活安逸
舒适。
未来前景
计算机将价格更低,外形更小巧,功能更强大,最终,它们将更加廉价,在几乎每件产品中都能看到它的身影。此外,几乎所有配备电脑的产品都能访问局域网或者互联。
经过下一个十年,众多家用设备将赋予嵌入式系统功能,彻底改造并永远改变它们。像桌面印刷系统和后来的互联网,嵌入式系统是一种将从根本上永远改变广告和营销工作的技术。它也将永远改变产品制造的种类和方式。嵌入式系统使得智能产品的开发和营销称为可能。这些产品能够满足用户的便利性。嵌入式系统的增长标志着工业化的新阶段。
毋庸置疑,嵌入式系统的领域越来越具有挑战性,嵌入式软件的开发问题吸引
了产业界和学术界大量研究人员。实际上,嵌入式系统开发投入了大量精力,许多研究人员仍然为之努力,使系统变得更智能。随着技术进步的快速发展,光明的前景就在眼前。
B 嵌入式系统设计
嵌入式系统基本组成
通常所有的嵌入式系统在其组成部件和要求方面都有很多共同点。下面是这些
要求和组成部件:
计算处理能力。这是嵌入式系统主要要求之一。处理过程可以通过微处理器、液压回路或者简单的电气/电子线路完成。处理能力需要能够把用户的要求,外界的变化转
化为终端用户需要的输出。
用来对芯片或者其他电路进行硬接线的处理逻辑呈指数增长,并日益复杂,如果没有软件,实现这么多的功能很难想象。通常做法是成熟的技术用硬件实现,正在发展的
技术用软件实现。
嵌入式系统从外界获得输入,如冰箱,空调有很多功能,像除霜、空气循环,
温度控制等。一些高级冰箱带有除臭,检测非工作状态的传感器。
为了计算、调整各种参数,系统需要不同级别的计算能力。要根据所需计算能
力水平来选择微处理器。
内存:内存是非常珍贵的资源,很多嵌入式系统都需要它。由于激烈的价格战,每种资源必须加倍小心进行处理。在很多系统中,要为将来扩展留有部分空间。由于嵌入式系统设计的限制,我们不能为它提供PC中的扩展槽。所以,内存必须谨慎处理。除非特别需要,否则不要使用占用大量内存或者复制大量数据结构的算法。
很多嵌入式系统本身没有硬盘或软盘驱动器。在大多数嵌入式系统中无法使用二级存储设备。所以这些系统通常使用ROM和非易失性RAM存储用户代码和参数。
一些程序不需要中止,将永远运行下去。在一些特殊类型的系统中,当出现突发事件或者不可恢复的错误,嵌入式系统将使用看门狗定时器复位系统。
实时性:我们可以把系统定义为对用户、外界或者自身(如定时器)输入做出反应的子系统或者组件集合。通常情况下,输入给定时间和系统反应时间之间存在时间差。在任何系统中,人们很自然地期望系统在特定时间间隔内做出反应。有一些系统,必须满足严格时间(不一定是短时间)要求。这些系统被称为实时系统。这些特性是:“迟到的答案
是错误的”。实时系统可以分为:
硬实时系统:实时系统一旦没有满足最后时限,将引起严重的后果,导致人员财产损失。如
飞行器,核反应堆等。
软实时系统:实时系统即使没有满足时限要求,也不会给用户带来很大不便。例如,电视机,DVD播放机或者音乐系统,互联网传输的多媒体流(能够承受数据包的损失)。
基于操作时间限制,实时系统还可以分为快速和慢速系统。
和实时性密切相关的概念是决定性。这也是实时编程区别于日常应用编程的重
要概念。实时系统在一定时间内做出响应,
它的行为是可以预测的。从出现输入到出现输出的时间间隔是确定的或者可预测的。它
要求系统应该在已知的时间周期内做出反应。
通信元件:嵌入式设备和应用不能作为信息存储的孤岛。它们不能孤立,而需要和其他设备进行通信,执行用户要求的任何操作。这些通信可以通过无线网络协议,如蓝牙,无线局域网等实现。通信元件给简单的迁入实时系统带来了“智能”。
嵌入式系统其他重要参数包括:
成本:成本是很多嵌入式系统背后的主要驱动因素。这要求设计人员非常注意内存、外围设备等的设计。在大量生产的产品中,这个因素至关重要。
可靠性:一些产品需要正常操作率达到99.999%。但像在烤箱里烤面包就没有这个必要了。可靠性需要设计人员采用一定水平的冗余。
寿命:具有长寿命的产品必须用鲁棒性强并被证明性能优异的元件制造
能量消耗:这个因素已经成为研究本身的一个重要范围。随着移动式设备的大量增加,能量消耗成为关注的热点。移动式设备的设计也是如此,能量消耗必须减至最低。常用的策略包括关闭不需要的外围设备。这些策略非常依赖软件。在编程中移动设备的编程
人员越来越注意节能特性。
嵌入式系统设计
嵌入式软件设计,必须建立详细的软件规范,包括
设想系统的外界环境和其它元件
执行过程中的要求,如硬件、内存使用,安全性,错误处理和能量使用
分析实时特性,满足时间限制要求。这需要合理分配处理的程序,安排任务和优先级。
部件之间进行通信所需协议的选择,所选协议正确性和性能的分析
设计中采用先进的方法应该保证达到要求的正确性和可靠性水平
解析嵌入式系统设计中的难点
与其他软件开发比较,嵌入式系统的开发要困难的多,原因如下:
复杂性:嵌入式系统的设计比其他软件困难。
测试:存在很多错误情况,因此修改错误很重要。
可预测性:系统的性能必须可以预测,才能使人们对其充满信心。如果性
能发生变化,
规范:嵌入式系统的规范必须逐条细化
领域知识:编程人员必须具有更多领域的知识
错误容限(容错能力):嵌入式系统需要高效的容错能力,所以当出错时,系统至少能部分恢复。嵌入式系统失效通常导致严重的后果(生命财产损失),系统地正确
性和可靠性至关重要。
自动化专业英语考试翻译
PART 3 Computer Control Technology UNIT 1 A 计算机的结构与功能 这一节介绍计算机的内部体系结构,描述了指令如何存储和译码,并解释了指令执行周期怎样分解成不同的部分。 从最基本的水平来讲,计算机简单执行存储在存储器中的二进制编码指令。这些指令按照二进制编码数据来产生二进制编码结果。对于通用可编程计算机,四个必要部件是存储器、中央处理单元(CPU,或简称处理器),外部处理器总线,输入/输出系统,正如图 3-1A-1所示。 外部处理器总线 存储器CPU输入/输出 图 3-1A-1 计算机的基本元件 存储器储存指令和数据。 CPU读取和解释指令,读每条指令所需的数据,执行指令所需的操作,将结果存回存储器。CPU所需的操作之一是从外部设备读取或写入数据。这利用输入/输出系统来实现。 外部处理器总线是一套能在其他计算机部件之间传送数据、地址和控制信息的电导线。 存储器 计算机的存储器是由一套连续编号的单元所组成。每个存储单元是一个能存二进制信息的寄存器。单元的编号称为地址。初始地址为0。制造商定义处理器的一个字长为单元的整数长。在每个字中,各位表示数据或指令。对于英特尔8086/87和摩托罗拉MC68000微处理器来说,一个字是16位长,但每个存储单元仅为8位,因此两个8位单元来存取获得一个数据字长。
为了使用存储器中的内容,处理器必须取来右边的内容。为了完成这一次读取,处理器把所需单元的二进制编码地址放到外部处理器地址总线的地址线上,然后,存储器允许处理器读取所寻址的存储单元的内容。读取存储单元的内容的这一过程并不改变该单元的内容。 存储器中的指令存储器中的指令由CPU取来。除非发生程序转移,它们按在存储器中出现的顺序来执行。用二进制形式所写的指令叫做机器语言指令。一种得到(指令)有效形式的方法是将(这些)位分成段,如图3-1A-2所示。每一段都包含一个不同类型信息的代码。 在简单的计算机中,每条指令可分为四段,每段有四位。每条指令包括操作代码(或操作码,每条指令有唯一的操作码)、操作数地址、立即数、转换地址。 在一个实际的指令集中,有很多指令。也有大量的存储单元来存储指令和数据。为了增加存储单元的数目,如果我们使用同样的方法,地址段的指令一定长于16位。除了增加指令长度外,还有很多增加微处理器寻址范围的方法:可变指令段、多字指令、多寻址模式,可变指令长度。我们不将详细讨论它们。 存储数据数据是存储器中代表代码的信息。为了有效利用存储空间和处理时间,大多数计算机提供了不同长度和表示方法的处理数据能力。能被处理器识别的各种不同表示称作数据类型。常用的数据类型有:位、二进制码、十进制数字(4位字节,BCD)、字节(8位)、字(2个字节)、双字(4个字节)。 有一些处理器提供了可处理其他数据类型。例如单精度浮点数据类(32位)和双精度浮点数据(64位)等的指令。还有另一类的数据–––特征数据。通常也表示为8位。在标准键盘上,每个计算机终端键和键的组合(例如shift和control功能键)有定为美国信息交换标准码的7位码。 存储器类型在数字控制系统的应用中,我们也关注不同存储技术的特征。对主存储器来说,我们需用它临时存储信息,并逐次地从不同单元写入或获得信息。这种类型的存储器称作随机访问存储器(RAM)。在某些情况下,我们不想让存储器中的信息丢失。因此我们愿使用特殊技术写入存储器。如果写入只在物理改变连接时才能实现,那么这种存储器称为只读存储器(ROM)。如果相互连接的模式可由程序设定,那存储器叫做可编程只读存储器(PROM)。如果需要实现改写的情况,我们有可擦的可编程只读存储器(EPROM)。电可擦除的PROM缩写为EEPROM。
电气自动化专业英文词汇缩写
电力系统power system 发电机generator 励磁excitation 励磁器excitor 电压voltage 电流current 升压变压器step-up transformer 母线bus 变压器transformer 空载损耗no-load loss 铁损iron loss 铜损copper loss 空载电流no-load current 有功损耗active loss 无功损耗reactive loss 输电系统power transmission system 高压侧high side 输电线transmission line 高压high voltage 低压low voltage 中压middle voltage 功角稳定angle stability 稳定stability 电压稳定voltage stability 暂态稳定transient stability 电厂power plant 能量输送power transfer 交流AC 直流DC 电网power system 落点drop point 开关站switch station 调节regulation 高抗high voltage shunt reactor 并列的apposable 裕度margin 故障fault 三相故障three phase fault 分接头tap 切机generator triping 高顶值high limited value 静态static (state) 动态dynamic (state) 机端电压控制AVR 电抗reactance 电阻resistance 功角power angle 有功(功率)active power 电容器Capacitor 电抗器Reactor 断路器Breaker 电动机motor 功率因数power-factor 定子stator 阻抗impedance 功角power-angle 电压等级voltage grade 有功负载: active load PLoad 无功负载reactive load 档位tap position 电阻resistor 电抗reactance 电导conductance 电纳susceptance 上限upper limit 下限lower limit 正序阻抗positive sequence impedance 负序阻抗negative sequence impedance 零序阻抗zero sequence impedance 无功(功率)reactive power 功率因数power factor 无功电流reactive current 斜率slope 额定rating 变比ratio 参考值reference value 电压互感器PT 分接头tap 仿真分析simulation analysis 下降率droop rate 传递函数transfer function 框图block diagram 受端receive-side
自动化专业英语常用词汇
自动化专业英语常用词汇 acceleration transducer 加速度传感器 accumulated error 累积误差 AC-DC-AC frequency converter交-直-交变频器 AC (alternating current) electric drive 交流电子传动 active attitude stabilization 主动姿态稳定 adjoint operator 伴随算子 admissible error 容许误差 amplifying element 放大环节 analog-digital conversion 模数转换 operational amplifiers运算放大器 aperiodic decomposition 非周期分解 approximate reasoning 近似推理 a priori estimate 先验估计 articulated robot 关节型机器人 asymptotic stability 渐进稳定性 attained pose drift 实际位姿漂移 attitude acquisition 姿态捕获 AOCS (attitude and orbit control system) 姿态轨道控制系统attitude angular velocity 姿态角速度 attitude disturbance 姿态扰动 automatic manual station 自动-手动操作器 automaton 自动机 base coordinate system 基座坐标系 bellows pressure gauge 波纹管压力表 gauge测量仪器
电气专业英语
电气自动化专业英语 abbreviate 缩写,缩写为 abscissa axis 横坐标 absolute encoder 绝对编码器 ac squirrel cage induction motor 交流笼型感应电动机ac motor 交流环电动机 academic 纯理论的 accelerometer 加速度测量仪 accommodate 适应 accutrol 控制器 acoustic wave 声波 active 有源的 active region 动态区域 active filter 有源滤波器 active component 有功分量 active in respect to 相对….呈阻性 active(passive) circuit elements 有(无)源电路元件actuate 激励,驱动 actuator 执行机构 actuator 执行器 adjacent 临近的,接近的 adjacent 相邻的,邻近的 Adjustable-voltage inverter 电压型逆变器admittance 导纳 advent 出现 air gap 气隙 aircraft 飞机 air-gap flux 气隙磁通 air-gap line 气隙磁化线 air-gap flux distribution 气隙磁通分布 algebraic 代数的 algebraic 代数的 algebraical 代数的 algorithm 算法 algorithmic 算法的 align 调整,校准 allowable temperature rise 允许温升 alloy 合金 allude 暗指,直接提到 alnico 铝镍钴合金 alphabet 字母表 alternating current, AC 交流
自动化专业英语教程(王宏文第2版)词汇表课件
architecture n. 体系结构 artillery shell 炮弹 conveyor n. 传送带 flip-flop n. 触发器 geothermal adj. 地热的 off-peak adj. 非高峰的 Ohm n. 欧姆 wye n. Y形联结,星形联结,三通 character recognition 文字识别 pattern recognition 模式识别 abound v. 大量存在 accelerate v. 加速 access v. 存取,接近 accessory n. 附件 accommodate v. 容纳,使适应 acoustic adj. 听觉的 acoustic sensor 声传感器,声敏元件 acronym n. 首字母缩写词 active adj. 主动的,有源的 active network 有源网络 actuator n. 执行器 ad hoc 尤其,特定地 address n. 寻址 address generators 地址发生器 adjoint n., adj. 伴随(的),共轭(的) admissible adj. 可采纳的,允许的 advent n. 出现 aerodynamic adj. 空气动力学的 aerodynamics n. 空气动力学,气 体力学 aesthetically adv. 美术地,美学地 aforementioned adj. 上述的,前面 提到的 agility n. 灵活,便捷 agility n. 灵活,便捷 AI 人工智能 air gap 气隙 airgap = air gap 气隙 air-to-close (AC) adj. 气关的 air-to-open (AO) adj. 气开的 albeit conj. 虽然 algebraic equation 代数方程 alignment n. 组合 all-electric range 全电动行驶里程 alleviate v. 减轻,缓和 allowance for finish 加工余量 alloy n. 合金 alnico n. 铝镍钴合金,铝镍钴永 磁合金 aloft adv. 高高地 alphanumeric adj. 字母数字混合 的 alternative n. 可供选择的办法 altitude n. 海拔 aluminum n. 铝 amortisseur n. 阻尼器 amplifier n. 放大器 amplify v. 放大 amplitude n. 振幅 anthropomorphically adv. 拟人地 anti-alias filter 抗混叠滤波器 APICS = American Production and Inventory Control Society 美国生产与 库存管理学会 apparatus n. 一套仪器,装置 approach n. 途径,方法;研究 aptness n. 恰当 arbitrary adj. 任意的 arbitrary adj. 任意的 architecture n. 架构 archive v. 存档 argument n. 辐角,相位 arithmetic-logic unit 算术逻辑部 件 armature n. 电枢,衔铁,加固 arrival angle 入射角 arrival point 汇合点 artificial intelligence 人工智能 ASIC = Application Specific Integrated Circuit 特定用途集成电路 assembly n. 装置,构件 assembly line 装配生产线 assumption n. 假设 asymmetric adj. 不对称的 asymptote n. 渐进线 asymptotically stable 渐近稳定 asynchronous adj. 异步的 asynchronous adj. 异步的 at rest 处于平衡状态 at the most 至多 attached adj. 附加的 attain v. 达到,实现 attenuate v. 减弱 attenuation n. 衰减 attitude n. 姿态 audio adj. 音频的 auto-isolation n. 自动隔离 autonomous adj. 自治的 autonomous adj.自治的,自激的 auto-restoration n. 自动恢复供电 auto-sectionalizing n. 自动分段 auxiliary material 辅助材料 axon n. 轴突 backlash n. 齿隙游移 bandwidth n. 带宽 bar code scanner 条码扫描仪 baud n. 波特 become adept in 熟练 bench mark 基准点 bias n. 偏压 bi-directional adj. 双向的 binary adj. 二进制的 binary-coded adj. 二进制编码的 biomass n. 生物质 biopsy n. 活体检查 bipolar adj. 双向的 BJT 双极结型晶体管 blackout n. (大区域的)停电 BLDM 无刷直流电动机 block diagram algebra 方块图计 算(代数) 1 / 11
电气自动化专业英语
第五章的参考译文:仅供参考,不恰当的地方,请自行修改补充,欢迎通过Email(qiulk@https://www.360docs.net/doc/5e16247199.html,)进行讨论和交流。 5.1 电动机发展简史 电动机已经存在很多年了。自从多年前的第一次应用以来,电动机的应用领域快速地扩大了。目前,其应用范围继续以快速增长。 托马斯.爱迪生因提出了大规模发电和传输电力而得名。他完成了由蒸汽机驱动的直流发电机的研发工作。爱迪生在电灯和发电方面的贡献引领了直流电机以及相关控制设备的发展。 大多数与电机运行相关的早期科学发现主要涉及直流系统。不久之后,交流电的发电和传输推广开来。转变到交流发电和传输的主要原因是变压器被用来提升交流电压以便于远距离传输电力。因此,变压器的发明使得发电和电力传输从直流向交流变换成为可能。目前,几乎所有的电力系统产生和传输的都是三相交流电。变压器使得由交流发电机产生的电压被升高而电流相应地被减小。这一切使得在一个降低了的电流水平上进行长距离的电力传输,减小了功率损失,而提高了系统的效率。 电机广泛应用于家用电器、工业和商业上,用于驱动机器和复杂的设备。许多机器和自动化设备需要精确控制。因此,自从早期应用于火车的直流电机以来,电机设计和复杂性已经发生了变化。电机控制方法已经成为关系机器和设备运行效率的至关重要的因素。一些创新,例如伺服控制系统和工业机器人已经引领了电机设计的新的发展方向。 我们复杂的交通系统也对电机的应用产生了影响。汽车和其它地面交通工具用电动机作为点火启动系统,用发电机作为电池充电系统。电动汽车成为最近的研究热点。飞机应用电机的方式与汽车相似,然而,在实际应用中,飞机上采用了复杂的同步电机和伺服控制电机。 5.2 电机的基本结构 旋转电机实现了电能-机械能之间的转换。发电机将机械能转换成电能,而电动机将电能转换成机械能。发电机和电动机具有相同的基本结构特点,这一点对于大多数类型的电机来说是一致的。虽然多种电机在结构上是相同的,但是,它们的功能是不同的。发电机的旋转运动由提供机械能输入的原动机提供。导体和发电机磁场之间的相对运动产生电能输出。电动机将电能施加到其绕组和磁场上,形成电磁感应作用,产生机械能或力矩。 大多数旋转电机的结构具有某种程度的相似性,多数电机具有一个静止的部件称为定子,而旋转的一组导体称之为转子。定子由轭或机壳组成,用于支撑和构成磁通的金属回路。 5.2.1磁极与绕组 旋转电机具有磁极,他们是电机定子的一个组成部分。磁极由钢片叠制而成,并且与机壳是绝缘的,在靠近转子的部分是弯曲的,用于提供低租的磁通回路。磁场绕组或磁场线圈被置于磁极周围。这些磁场线圈构成了电磁铁,用来与转子产生电磁场相互作用,从而产生感生电压或在电动机中产生力矩。 5.2.2转子结构 在电机的研究中,需要理解由电动机或发电机的旋转部分产生的电磁场,该旋转部分称为电枢或转子。一些类型的电机采用坚固的金属转子,成为为鼠笼式转子。 5.2.3滑环、开口环和电刷 为了将电能施加到旋转装置上,例如电枢,一些滑刷接触必须建立起来。滑刷接触可以是滑环,也可以是开口环。滑环由绝缘的圆柱形材料构成,其上粘贴两块分开的固态金属环,滑动电刷由碳或石墨制成,放在金属环上,在旋转过程中,向滑环施加或抽取电能。开口环换向器与滑环相似,只不过该金属环被分成两个或更多个独立的部分。作为一个基本原则/惯例,滑环用于交流电动机和发电机,而开口环用于直流电动机。开口尽可能地小,以减少碳刷的火花。滑环和开口环如图5.1所示。 5.2.4其它电机部件 在旋转电机的结构中,还用到其它几个部件。其中有电机轴,在一组轴承上进行旋转。轴承可以是滚珠轴承、滚柱轴承或轴套轴承。轴承密封通常是由毡类材料制成,用于保持轴承润滑和防止灰尘进入。转子芯通常由叠制的钢片组成,以在磁极之间提供低磁阻的磁通回路,并有利于减小涡流。内部和外部接线柱提供了传入或传出电能的途径。 5.3 电动机的结构特点 在现有的电子机械装置中,能量转换过程通常有两个重要特点。有磁场绕组,用以产生磁通密度,还有电枢绕组,产生起作用的感生电动势。在本小节中,将描述主流类型电动机的突出结构特点,揭示这些绕组的位置、并展示这些电机的基本组成部分。 5.3.1 三相感应电动机 这是一种工业上最耐用、应用最广的电动机。它的定子有高规格的钢片叠制而成,内表面开槽用于安放三相绕组。
自动化专业英语PartⅤ-Ⅵ 课文原文内容
Part Ⅴ Sensors and Transmitters In a feedback control system, the elements of a process-control systemare defined interms of separate functional parts of the system . The four basic components of controlsystems are thesensors, transmitter , controller , and final control elements . Thesecomponents per form the three basic operations of every control system: measurementdecision, and action. Sensors and transmitters perform the measurements operation of control system. Thesensor produces a phenomenon, mechanical, or the like related to the process variable that itmeasures. The function of transmitter in turn is to convert the signal from sensor to the formrequired by the final control device. The signal, therefor e, is related to the process variable. Two analog standards are in common u se as a means of representing the range ofvariables in control systems. For electrical systems we use a range of electric current carriedin wires , and for pneumatic systems we use a range of gas pressure carried in pipes . Thesesignals are used primarily to transmitvariable information over some distance, such as to andfrom the control room and the plant .Fig .5 . 9 shows a diagram of a process- controlinstallation where current is used to transmit measurement data about the controlled variableto the control room, and gas pressure in pipes is used to transmit a feedback signal to a valve to change flow as the controlling variable . Fig .5 .9 Electrical current and pneumatic pressures are the most common means of information transmitter in the industrial environment Current signal The most common current transmission signal is 4 to 20 mA . Thu s , in the preceding temperature example, 20℃might be represented by 4 mA, and 120℃by 20 mA, with all temperatures in between represented by a proportional current . The gain is 略 That is , we can say that the gain of sensor/ transmitter is ratio of the span of the output to the span of input . Current is used instead of voltage because the system is then les s dependent on load . Voltage is not used for transmission because of its susceptibility to changes of resistance in the line . Pneumatic signals The most common standard for pneumatic signal transmitter is 3 to 15 psi . In this case, when a sensor measures some variable in a range it is converted into a proportionalpressure of gas in a pipe . The gas is usually dry air .The pipe may be many hundreds of meters long , but as long as there is no leak in the system the pressure will be propagated down the pipe . This English system standard is still widely used in the U .S ., despite the move to the SI system of units . The equivalent SI range that will eventually be adopted is 20 to 100 kPa. The two cases presented show that the gain of the sensor/ transmitter is constant over its completeoperating range . For most sensor/ transmitter this is the case; however , there are some in stances , such as a differential pressure sensor used to measure flow, when this is not the case . A differential pressure sensor measures the differential pressure ,h, across an orifice . This differential pressure is related to the square of the volumetric flow rate F . That is F2 ah . The equation that describes the output signal form an electronicdifferential pressure transmitter when used to measure volumetric flow with a range of 0~F maxgpm is
自动化专业英语全文翻译
《自动化专业英语教程》-王宏文主编-全文翻译 PART 1Electrical and Electronic Engineering Basics UNIT 1A Electrical Networks ————————————3 B Three-phase Circuits UNIT 2A The Operational Amplifier ———————————5 B Transistors UNIT 3A Logical Variables and Flip-flop ——————————8 B Binary Number System UNIT 4A Power Semiconductor Devices ——————————11 B Power Electronic Converters UNIT 5A Types of DC Motors —————————————15 B Closed-loop Control of D C Drivers UNIT 6A AC Machines ———————————————19 B Induction Motor Drive UNIT 7A Electric Power System ————————————22 B Power System Automation PART 2Control Theory UNIT 1A The World of Control ————————————27 B The Transfer Function and the Laplace Transformation —————29 UNIT 2A Stability and the Time Response —————————30 B Steady State—————————————————31 UNIT 3A The Root Locus —————————————32 B The Frequency Response Methods: Nyquist Diagrams —————33 UNIT 4A The Frequency Response Methods: Bode Piots —————34 B Nonlinear Control System 37 UNIT 5 A Introduction to Modern Control Theory 38 B State Equations 40 UNIT 6 A Controllability, Observability, and Stability B Optimum Control Systems UNIT 7 A Conventional and Intelligent Control B Artificial Neural Network PART 3 Computer Control Technology UNIT 1 A Computer Structure and Function 42 B Fundamentals of Computer and Networks 43 UNIT 2 A Interfaces to External Signals and Devices 44 B The Applications of Computers 46 UNIT 3 A PLC Overview B PACs for Industrial Control, the Future of Control
2011自动化专业英语考试试卷_第一学期1
2010—2011学年第1学期 《专业外语2-1》补考试卷 (适用专业:自动化,测控) 专业班级 姓名 学号 开课系室信控学院自动化系 考试日期 题号一二三四五总分得分 阅卷人
一,Translate the followings into Chinese (1 point each, total of 20 points) 1.manual control [自] 手动控制;[计] 人工控制 2.empirical modeling 统计] 经验模型 3.phase error compensation 位相误差补偿 4.step response [电子] 阶跃响应;[电子] 瞬态特性 5.differential pressure [流] 压差 6.resonant peak 振峰值 feedback coefficient 反馈系数Feedback Control Gain Coefficient:反馈增益coefficient feedback:温度系数反馈 https://www.360docs.net/doc/5e16247199.html,limeter/centimeter/kilometer 毫米厘米,公分公里,千米 8.accuracy/sensitivity/reliability n. 精确度,准确性n. 敏感;敏感性;[医]过敏n. 可 靠性 9.amplitude/frequency/phase n. 振幅;n. 频率;n. 相;位相; 10. try-and-error tuning try-and-error tuning try-and-error调谐 10.measured variable 被测变量;测定变量 11.system protection 系统保护 maximum overshoot maximum overshoot:最大超调量;最大过冲;最大超越量 maximum percent overshoot:最大超越量 12.analog/digital filter 模拟[电子] 数字滤波器 13.impulse function 数] 脉冲函数;冲力函数;冲击函数 14.volumetric flowmeter 体积式量计;[仪] 容积式流量计 15.upper limit value Attribute Upper Limit Value属性上界值 16.pressure/temperature/level n. 压力;压迫,压强n. 温度n. 水平;水平面;标准 17.block diagram 框图;方块图 二,Translate the followings into English (1 point each, total of 20 points) 1.过程变量Process Variable ;process variable ;Process Variation 2.闭环控制[close-cycle; closed-cycle]closed-loop control 3.传递函数[自] transfer function 4.时间延迟[通信] time delay time lag 频带宽度frequency band width ;bandwidth 传感器/换能器sensor ,transducer,sense organ,sensing element;[电子] transducer energy converter 孔板流量计orificeplate flowmeter;orifice meter
电气自动化专业英语(修订版)单词翻译
电气自动化专业英语(修订版)-哈尔滨工业大学出版社 第一章 personnel 人员,职员 voltmeter 电压表,伏特表(表) megohmmeter 兆欧表 ohmmeter 欧姆表,电阻表 wattmeter 瓦特表(计),电表,功率(W ) watt-hour 瓦时,瓦特小时(能量单位) ammeter 安培计,电流表 calibrate 校正(准) scale 刻度,量程 rated 额定的 interfere with 有害于…… indicating needle (仪表)指针 hazardous 危险的 pivot 支点 terminal 接线端子 spiral 螺旋形的 spring 弹簧 shunt 分流;分路(流)器;并联,旁路 rectifier 整流器 electrodynamometer 电测力计 strive for 争取 vane (机器的)叶,叶片 strip 条,带,(跨接)片 crude 不精细的,粗略的 polarity 极性 fuse 保险丝,熔丝 rugged 坚固的 depict 描绘,描写 cartridge fuse 盒式保险丝 blow (保险丝)烧断 plug fuse 插头式保险丝 malfunction 故障 deenergize 不给……通电 insulation 绝缘 generator 发电机 magneto 磁发电机 humidity 湿度 moisture 潮湿,湿气 abbreviate 缩写,缩写为 transformer 变压器 thumb 检查,查阅
milliammeter 毫安表multimeter 万用表dynamometer 测力计,功率计aluminum 铝 deteriorate (使)恶化 eddy current 涡流 gear 齿轮,传动装置 dial 刻度表 第二章 semiconductor 半导体squirrel 鼠笼式 diode 二极管 thyristor 晶闸管 transistor (电子)晶体管 triac 双向可控硅 phase 相位控制 silicon 硅 crystal 晶体 wafer 薄片 anode 阳极,正极 cathode 阴极 collector 集(电)极 emitter (发)射极 schematic (电路)原理图符号leakage 漏电流 rating 额定值,标称值;定额dissipate 散发 breakdown 击穿 heat sink 散热器 self-latching 自锁commutation 换向 geometry 几何结构 squeeze 压榨,挤,挤榨 light-dimmer 调光 capability 容量studmounted 栓接式 hockey puck 冰球 fin 飞过 active 有源的 horsepower 马力 diameter 直径 in.英寸(inch,inches)extruded 型材的
自动化专业英语单词
Abound v.大量存在Accelerate v.加速Access v.存取,接近Accommodate v.容纳,使适应 Acoustic adj.听觉的Acousticsensor声传感器,声敏原件 Acronym n.首字母缩写词 Active adj.主动的,有源的 Active network 有源网络 Actuator n.执行器 Ad hoc 尤其,特定地Address n.寻址Addressgenerators地址发生器 Adjoint n.,adj.伴随(的),共轭(的) Admissible adj.可采纳的,允许的 Advent n.出现Aerodynamic adj.空气动力学的Aerodynamic n.空气动力学,气体力学Aesthetically adv.美术地,美学地Aforementioned adj.上述的,前面提到的Agility n.灵活,便捷 Ai 人工智能 Air gap 气隙 Aircraft n.飞行器 Airgap=air gap 气隙 Air-to-close(AC)adj.气关的 Air-to-open(AO)adj.气开的 Albeit conj.虽然Algebraic equation 代数方程Alignment n.组合 All-electricrange全电动 行驶里程 Alleviate v.减轻,缓和 Allowance for finish 加 工余量 Alloy n.合金 Alnico n.铝镍钴合金,铝 镍钴永磁合金 Aloft adv.高高地 Alphanumeric adj.字母 数字混合的 Alternative n.可供选择 的办法 Altitude n.海拔 Aluminum n.铝 Amortisseur n.阻尼器 Amplifier n.放大器 Amplify v.放大 Amplitude n.振幅 Answeringmachine电话 答录机 Anthropomorphically adv. 拟人的 Anti-aliasfilter抗混叠滤 波器 Antilockbrakingsystem 防抱死系统 APICS=AmericanProduct ionandInventoryControl Society美国生产与库存 管理学会 Apparatus n.一套仪器, 装置 Application n.应用(程序) Approach n.途径,方法; 研究 Aptness n.恰当 Arbitrary adj.任意的 Arbitrary adj.任意的 Architecture n.架构 Architecture n.体系结构 Archive v.存档 Argument n.辐角,相位 Arithmetic-logic unit 算 术逻辑部件 Armature n.电枢,衔铁, 加固 Arrival angle 入射角 Arrival point 汇合点 Artificial intelligence 人 工智能 Artillery shell 炮弹 ASIC=ApplicationSpecific IntegratedCircuit特定用 途集成电路 Assembly n.装置,构件 Assemblyline装配生产 线 Assumption n.假设 Asymmetric adj.不对称 的 Asymptote n.渐近线 Asymptotically stable 渐近稳定 Asynchronous adj.异步 的 At rest 处于平衡状态 At the most 至多 Attached adj.附加的 Attain v.达到,实现 Attenuate v.减弱 Attenuation n.衰减 Attitude n.姿态 Attribute n.品质,特征 Audio adj.音频的 Auto-isolation n.自动隔 离 Automatictellermachine 自动柜员机 Autonomous adj.自治的 Autonomous adj.自治的, 自激的 Auto-restoration n.自动 恢复供电 Auto-sectionalizing n.自 动分段 Auxiliary material 辅助 材料 Axon n.轴突 Backlash n.齿隙游移 Bandwidth n.带宽 Bar code scanner 条码 扫描仪 Baud n.波特 Become adept in 熟练 Bench mark 基准点 Bias n.偏压 Bi-directional adj.双向 的 Binary adj.二进制的 Binary-coded adj.二进 制编码的 Biomass n.生物质 Biopsy n.活体检查 Bipolar adj.双向的 Bjt 双极结型晶体管 Blackout n.(大区域的) 停电 Bldm 无刷直流电动机 Block diagram algebra 方块图计算(代数) Boiler n.汽锅,锅炉 Boolean algebra 布尔代 数 Boost chopper 升压式 变压器 Bound v.限制 Bracket v.加括号 Break frequency 转折 频率 Breakaway point 分离 点 Breakdown n.击穿,雪崩 Breakover n.导通 Brush n.电刷 Buck chopper 降压式变 压器 Building blocks 积木 Buildingautomation楼 宇自动化 Bulky adj.庞大的,笨重