Battery Soc and SoH

Abstract—This paper describes experimental results aiming at analyzing lithium-ion batteries performances with aging, for different state of charge and temperatures. The results are provided from electrochemical impedance spectroscopy (EIS) measurements on new and aged cells. A climatic test chamber is used during experiments to simulate the conditions of the temperature. Experimental data are plotted over a broad spectrum of frequencies on Nyquist diagrams. We will also inspect the impact of the presence of a DC current during the EIS measurement. Finally, obtained results will be processed in a way to be used in a fuzzy logic system (FLS), to assess either the state of charge (SOC) or the state of health (SOH) of cells.
Index Terms—Lithium-ion batteries, Aging, EIS, State Of Charge, State Of Health, Fuzzy Logic System.
I.I NTRODUCTION
Lithium ion secondary batteries are now being used in wide applications especially for consumer electronics. However they are growing up in popularity for defense, automotive, and aerospace applications because they are light in weight, high in power, and long in cycle life.
Since several years SAFT has developed a range of lithium ion cells and batteries to cover the full spectrum of applications [1].
Ageing of lithium ion cells is an important question in all the applications that include this kind of batteries. It impacts on the battery performance [2], and hence, it modifies considerably the output parameters (such as the state of health).
For secondary batteries, the ageing includes both the calendar aging due to storage related to the time domain (in the range of months to years), and cycling aging related to the operation of charge/discharge of cells depending on the application profile.
To follow such a characteristic, electrochemical impedance spectroscopy (EIS) measurements on SAFT lithium ion batteries are carried out. EIS measurements interest both electrochemical and electrical researchers. The first ones, because it gives them information about kinetics in the * Corresponding author: Tel.: +33 5 57 10 94 18
E-mail address: ali.zenati@https://www.360docs.net/doc/6412796606.html, electrodes (such as Li+ diffusion rate) [3]. And the second ones, because it helps them to have an accurate equivalent circuit of the battery. This common measurement technique methodology has been studied for almost all battery chemistries not only for SOC, but also for SOH determination [4, 5].
Fuzzy logic system is one of the used methodologies, which combined with EIS measurement allows to assess the SOC and the SOH of batteries. Singh et al. have published noteworthy articles about using the EIS measurement with the fuzzy logic methodology to determine the SOC and/or the SOH of different battery chemistries from the VRLA batteries [6], to lithium-ion batteries used in defibrillators [7, 8], and other such as Nickel/metal hydride cells [9].
This paper shows experimental results obtained by EIS measurements on 2 types of Lithium-ion batteries, which had different aging processes and may differ at the electrochemical level, and their utilization as input parameters of a fuzzy logic system (FLS) to evaluate the SOC/SOH of batteries. Also, the word ‘battery’ will refer to either one cell or several cells.
II.O VERVIEW OF EXPERIMENT
https://www.360docs.net/doc/6412796606.html,ed lithium-ion cells
The cells used are lithium-ion SAFT power cells: VL30P which outputs a nominal capacity of 30 Ah and VL6P which outputs a nominal capacity of 6Ah. They have both a full charge voltage of 4V. And their chemistry is based on a natural graphite negative, a LiNi x Co y Al z O2 positive and 1M LiPF6 electrolyte. We will compare results obtained by each kind of cells.
For the VL30P, depicted in Figure 1, experimental tests were done for aged cells under different temperatures (0°C, 25°C/77°F and 45°C). This cells got accelerate ageing procedure during more than 6 months, in a climatic chamber at 60°C, in a fully state of charge. Accelerate ageing is caused by the application of a high temperature which contribute to degrade the age of batteries [10].
The climatic chamber can have a temperature fluctuating between -30°C and 60°C.
Estimation of the SOC and the SOH of Li-ion Batteries, by combining Impedance Measurements with the Fuzzy Logic Inference
A. Zenati1,*, Ph. Desprez1, and H. Razik2
1SAFT, 111-113, boulevard Alfred Daney, 33074 Bordeaux, France 2Université de Lyon, Lyon, F-69622, France; Université Lyon 1, Lyon, F-69622, France; CNRS, UMR5005, Laboratoire AMPERE, Villeurbanne, F-69622, France
Figure 1: Lithium-ion VL30P cell from SAFT
Figure 2: Lithium-ion VL6P cell from SAFT with connecters
for EIS measurements.
For the VL6P shown in Figure 2, experimental tests were done for new and aged cells at room temperature 25°C. Concerning the aged ones, they got different process of aging that we will describe later.
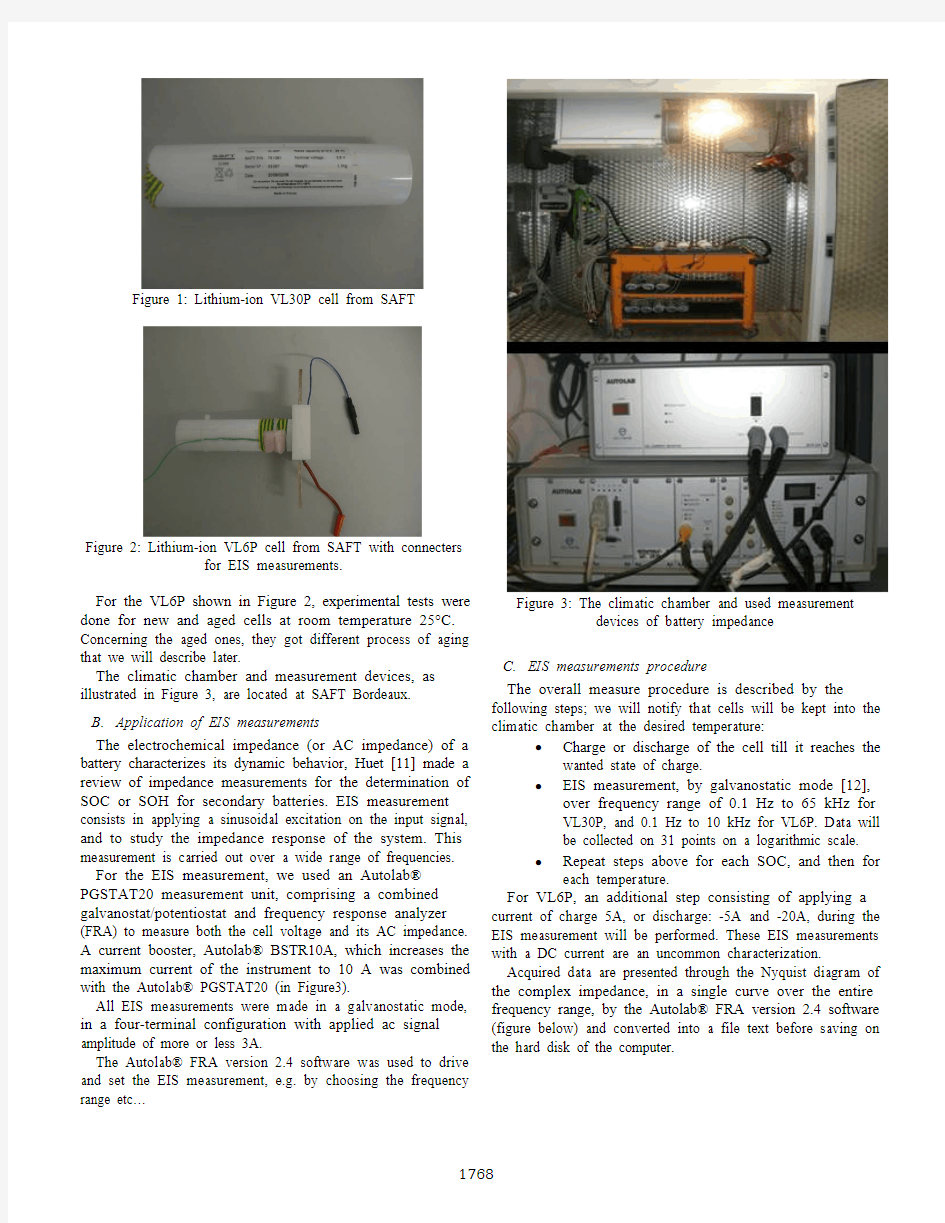
The climatic chamber and measurement devices, as illustrated in Figure 3, are located at SAFT Bordeaux.
B.Application of EIS measurements
The electrochemical impedance (or AC impedance) of a battery characterizes its dynamic behavior, Huet [11] made a review of impedance measurements for the determination of SOC or SOH for secondary batteries. EIS measurement consists in applying a sinusoidal excitation on the input signal, and to study the impedance response of the system. This measurement is carried out over a wide range of frequencies. For the EIS measurement, we used an Autolab? PGSTAT20 measurement unit, comprising a combined galvanostat/potentiostat and frequency response analyzer (FRA) to measure both the cell voltage and its AC impedance.
A current booster, Autolab? BSTR10A, which increases the maximum current of the instrument to 10 A was combined with the Autolab? PGSTAT20 (in Figure3).
All EIS measurements were made in a galvanostatic mode, in a four-terminal configuration with applied ac signal amplitude of more or less 3A.
The Autolab? FRA version 2.4 software was used to drive and set the EIS measurement, e.g. by choosing the frequency range etc…
Figure 3: The climatic chamber and used measurement
devices of battery impedance
C.EIS measurements procedure
The overall measure procedure is described by the following steps; we will notify that cells will be kept into the climatic chamber at the desired temperature:
?Charge or discharge of the cell till it reaches the wanted state of charge.
?EIS measurement, by galvanostatic mode [12], over frequency range of 0.1 Hz to 65 kHz for
VL30P, and 0.1 Hz to 10 kHz for VL6P. Data will
be collected on 31 points on a logarithmic scale.
?Repeat steps above for each SOC, and then for each temperature.
For VL6P, an additional step consisting of applying a current of charge 5A, or discharge: -5A and -20A, during the EIS measurement will be performed. These EIS measurements with a DC current are an uncommon characterization. Acquired data are presented through the Nyquist diagram of the complex impedance, in a single curve over the entire frequency range, by the Autolab? FRA version 2.4 software (figure below) and converted into a file text before saving on the hard disk of the computer.
Figure 4: Front panel of Autolab FRA software
D. Reminder on fuzzy logic principles
Fuzzy logic is a problem-solving methodology that provides a simple way to arrive at a definite conclusion based upon vague, ambiguous, imprecise, noisy, or missing input information. It is a branch of machine intelligence which includes multi-valued logic that helps computers which have statements that are true or false, to enable them to reason in a world where things are only partially true, just as the humans brain do.
The term "fuzzy logic" emerged as a consequence of the development of the theory of fuzzy sets proposed by Lotfi Zadeh, a professor at the University of California at Berkley, in 1965 [13], who established that the degree of truth (the value of a membership function) of a statement in fuzzy logic, can range between 0 and 1 and is not constrained to the two truth values {true (1), false (0)} as in classic binary logic [14].
We can resume the operating principle of a FLS, in a structure as simple as illustrated in the Figure 5 bellow with the following component, and thus decomposing in three well-marked steps:
Figure 5: Components of a fuzzy logic system
First step: Fuzzification:
Fuzzification is a mapping from the observed input to the fuzzy sets defined in the corresponding universe of discourse. In other words, it's called to the process of converting the crisp input into a fuzzy variable - using a fuzzy linguistic value - by
the mean of membership functions, to be used by reasoning mechanism.
Linguistic variables are the “vocabulary” of a FLS, or as defined, the fundamental knowledge representation unit in approximate reasoning [15]. Zadeh states: “By a linguistic variable we mean a variable whose values are words or sentences in a natural or artificial language”.
Based on this, each membership function of the universe of discourse of a variable, for example, can have a linguistic variable.
Generally to summarize, linguistic variables are non-numeric and often used to facilitate the expression of rules and facts.
The membership function is a generalisation of the indicator function in classical sets, which is defined by:
In FLS, it allows to represent the degree of truth of an input variable which belong totally (if the value is 1), partially (if the value is between 0 and 1), or not at all (if the value is 0) to the fuzzy set.
For the sake of simplicity, the most popular and typical shapes of membership functions include Triangular-, Trapezoidal-, Gaussian/bell-shaped functions. These three choices can be explained by the ease with which a parametric, functional description of the membership function can be obtained, stored with the minimal use of memory, and manipulated efficiently… Figure 6 depict the above choices
for the membership functions.
Figure 6: different shapes of membership functions
Second step: Rule base/ Data base:
The database involves the choice of membership functions for the input and output variables used in formulating the fuzzy rules, and also when required the choice of scaling factors.
The rule base describes the relationship between input and
output variables, this rules are all fired in parallel and are written in an ‘if…then’ linguistic format such as ‘if temperature is hot and discharge rate is high then output is low’.
The design parameters of the rule base include:
?Choice of process state and control output variables,
?Choice of the content of the rule-antecedent and the rule-consequent,
?Choice of term-sets for the process state and control output variables.
Second step: Inference Engine:
Mamdani's fuzzy inference method is the most commonly seen fuzzy methodology. Mamdani's method was among the first control systems built using fuzzy set theory. It was proposed in 1975 by Ebrahim Mamdani, who based his effort on Lotfi Zadeh's 1973 paper on fuzzy algorithms for complex systems and decision processes.
Its definition is based on the intersection operation, i.e.,
q
p
q
p∧
≡
→
.
The so-called Sugeno, or Takagi-Sugeno-Kang, method of fuzzy inference, introduced in 1985, is similar to the Mamdani method in many respects. The application of the fuzzy operator is exactly the same. The main difference between Mamdani and Sugeno is that the Sugeno output membership functions are either linear or constant.
A typical rule in a Sugeno fuzzy model has the form:
If Input 1 = x and Input 2 = y, then Output is z = ax + by + c For a zero-order Sugeno model, the output level z is a constant (a=b =0). This means that the output is a singleton rather than a fuzzy set, in the simplest Sugeno model.
Third step: Defuzzification:
Defuzzification converts the set of modified control output values into a single point-wise value which means that it transforms the fuzzy output sets to a crisp (real-valued) output. This step operates always with the output membership functions (which can be singletons), hence, we use specific methods to determinate the right value of the crisp output, such as:
?Center-of-Gravity/Area defuzzification,
?Center-of-Sums defuzzification,
?Center-of-Largest-Area defuzzification,
?First-of-Maxima defuzzification,
?Middle-of-Maxima defuzzification,
?Height defuzzification, …
The Center-of-Gravity method (also referred to as Center-of-Area method in the literature) is the best well-known and most utilized defuzzification method. It determines as its name indicates, the center of gravity below the combined output membership function.
The formula is given as follows:
For a membership function μU(u i), and U={u1,u2,…,u l}. Less used than the first method, the Middle-of-Maxima Defuzzification is instead used when we need to discriminate an output value, because it’s based on the calculus of the average’s outputs values the most likely.
III.R ESULTS AND DISCUSSION
A.EIS measurements on aged VL30P cells
As described in the measure procedure above, the aged VL30P cells will be in a steady state, i.e. no current DC (neither of charge nor discharge) will be applied during the EIS measurement. Representative results for each of the temperatures are shown below in function of three levels of the SOC: at 100%, 60% and 20%. Figures 5-a, 5-b and 5-c, illustrate EIS measurements for an aged VL30P for 0°C, 20°C, and 45°C respectively.
Figure 7-a: Results of EIS measurements at 0°C
Figure 7-b: Results of EIS measurements at 20°C
Figure 7-c: Results of EIS measurements at 45°C Figure 7-a shows that values of Z’o (defined as the point where Z’’ is equal to 0) at 20%, 60% and 100% of SOC almost overlap each other. However, Figure 7-b and Figure 7-c show that as the SOC decreases, the value of the resistance Z’o grows up.
This results show that for a temperature higher than 0°C, we can perform a fuzzy logic system to assess the value of the SOC. Inputs of the FLS will be based on previous data extracted from EIS measurements.
B.EIS measurements on aged VL6P cells
This time a current, either of charge or discharge, was applied during the EIS measurements, both on new and aged VL6P cells. As mentioned above, all measurements were conducted at room temperature, and the aged cells got different process of aging, hereafter the difference between cells:
?Cell 1, 2, 3 and 4: new VL6P cells. For these new cells, only analyses of EIS measurements of the
cell 1 are discussed here, because the other new
cells have the same features.
?Cell 5: aged cell, VL6P after 725 days of storage at 60°C, at 60% SOC.
?Cell 6: aged cell, VL6P after 500 days of storage at 60°C, at 60% SOC.
?Cell 7: aged cell, VL6P after 6200h of cycling according to a particular HEV accelerated profile. Analysis of the EIS measurement of the “Cell 1” at 80% of SOC, at room temperature 25°C, without applied DC current, under a current of charge of 5 A, and a current of discharge of both -5A and -20A, are gathered on the Nyquist diagram shown in Figure 8-a. Figure 8-b is a zoom of this Nyquist plot.
Figure 8-a: results of EIS measurement for VL6P Cell 1
Figure 8-b: zoom on the Nyquist plot of Figure 6-a
It appears that at Z”=0: as current DC decreases, the value of resistance Z’o does alike.
Figure 9-a, Figure 9-b and Figure 9-c display EIS measurement for the different cells at 80% of SOC, respectively without DC current, under a current of discharge of -5A and a current of charge of 5A.
From these experimental results, it emerges that not only does the value of Z’o rise up in aging cells, but it also changes depending of the type of ageing. In addition, we can observe that there is no difference between results obtained for EIS measurements with a current of charge or discharge, either for new or aged cells. Moreover, it is shown that having a current of charge/discharge during the EIS measurement has an influence on the AC impedance of lithium-ion batteries (see Figure 8-a, Figure 9-a, b, c).
Finally, fuzzy logic systems can be deducted from both results of EIS measurements without DC current and under a DC current of charge or discharge. And as we saw differences between impedance of new and aged cells, we can use EIS measurements to evaluate the SOH of cells, taking into account the used process of ageing, and the fact that we are either under DC current or not.
Figure 9-a: Results of EIS measurements on different VL6P
cells with no DC current
Figure 9-b: Results of EIS measurements on different VL6P cells with a DC current of discharge
Figure 9-c: Results of EIS measurements on different VL6P
cells with a DC current of charge
IV.C ONCLUSION
In this paper, we have presented EIS measurements for two types of lithium-ion cells, and how we can use obtained results to build a fuzzy logic system, by processing the correct input parameters. In addition to the chemical composition of cells, each condition of temperature and SOC has an impact on the use of batteries, specifically here on the AC impedance. Also the DC current during EIS measurement may have an influence on the AC impedance. The interpretation of results can differ depending on the expert’s knowledge either in electrochemical or electrical engineering.
Further studies are planned to be performed, showing how more extreme conditions of temperatures may impact on the cycle life of lithium-ion batteries, with more interest in other cell configurations.
R EFERENCES
[1]G. Sarre, Ph. Blanchard, M. Broussely, “Aging of lithium-ion batteries”,
Journal of Power Sources 127 (2004) 65–71.
[2] A. Jossen, “Fundamentals of battery dynamics”, Journal of Power
Sources 154 (2006) 530–538.
[3]M. Broussely, Ph. Biensan, F. Bonhomme, Ph. Blanchard, S. Herreyre,
K. Nechev, R.J. Staniewicz, “Main aging mechanisms in Li ion
batteries”, Journal of Power Sources 146 (2005) 90–96.
[4]S. Piller, M. Perrin, A. Jossen, “Methods dor state-of-charge
determination and their applications”, Journal of Power Sources 96
(2001) 113–120.
[5]S. Rodrigues, N. Munichandraiah, A. K. Shukla, “A review of state-of-
charge indication of batteries by means of a.c. impedance
measurements”, Journal of Power Sources 87 (2000) 12–20.
[6]P. Singh, S. Kaneria, J. Broadhead, X. Wang, J. Burdick, “Fuzzy logic
estimation of SOH of 125Ah VRLA batteries”, Telecommunications
Energy Conference, 2004. INTELEC 2004. 26th Annual International,
page(s): 524 – 531.
[7]P. Singh, R. Vinjamuri, X. Wang, D. Reisner, “Fuzzy logic modeling of
EIS measurements on lithium-ion batteries”, Electrochimica Acta 51
(2006) 1673–1679.
[8]P. Singh, R. Vinjamuri, X. Wang, D. Reisner, “Design and
implementation of a fuzzy logic-based state-of-charge meter for Li-ion
batteries used in portable defibrillators”, Journal of Power Sources 162
(2006) 829–836.
[9] A. J. Salkind, C. Fennie, P. Singh, T. Atwater, D. E. Reisner,
“Determination of state-of-charge and state-of-health of batteries by
fuzzy logic methodology”, Journal of Power Sources 80 (1999) 293-300.
[10]M. Broussely, S. Herreyre, Ph. Biensan, P. Kastztejna, K. Nechev, R.J.
Staniewicz, “Aging mechanism in Li-ion cells and calendar life
predictions”, Journal of Power Sources 97-98 (2001) 13–21.
[11] F. Huet, “A review of impedance measurements for determination of the
state-of-charge or state-of-health of secondary batteries”, Journal of
Power Sources 70 (1998) 59-69.
[12]P. Singh, C. Fennie Jr., D. Reisner, “Fuzzy logic modeling of SOC and
available capacity on nickel/metal hydride batteries”, Journal of Power
Sources 136 (2004) 322–333.
[13]Zadeh, L.A. (1965). "Fuzzy sets", Information and Control 8 (3): 338–
353.
[14]Novák, V., Perfilieva, I. and Mo?ko?, J. (1999) Mathematical principles
of fuzzy logic Dodrecht: Kluwer Academic. ISBN 0-7923-8595-0. [15]Zadeh, L.A., "The concept of a linguistic variable and its application to
approximate reasoning, Parts 1, 2, and 3," Information Sciences, 1975,
8:199-249, 8:301-357, 9:43-80.
SOC设计方法与实现
关于对 《SoC设计方法与实现》的一点认识 '
| 目录 摘要 (3) 一 SoC概述 (3) 二SoC设计现状 (4) 1 芯核的设计流程 (7) 2 软硬件协同设计的流程 (8) 3 Soc的系统级设计流程 (8) 三 SoC发展的现状 (10) ( 1 SoC在中国发展的现状 (10) 2 国外SOC的发展现状 (11) 四SOC的未来发展趋势 (12) ;
\ 摘要 通过将近四周的学习,我已经对SoC有了一些基本的认识。在任课教师的指导下,我完成了此篇论文。本文主要从什么是SoC ,SoC 有什么用途,SoC的设计,SOC发展的现状和未来趋势这五个方面来简单论述的,在论述的过程中查阅了一部分文献资料,并且兼顾含有了集成电路的相关知识。 关键词 SoC 用途发展趋势 一 SoC概述 \ 随着集成电路1技术进入新的阶段,市场开始转向追求体积更小、成本更低、功耗更少的产品,因此出现了将多个甚至整个系统集成在一个芯片2上的产品––系统芯片(system on a chip,SoC)。系统芯片将原来由多个芯片完成的功能,集中到单个芯片中完成。更具体地说,它在单一硅芯片上实现信号采集、转换、存储、处理和I/O等功能,或者说在单一硅芯片上集成了数字电路、模拟电路、信号采集、 1 1952年5月,英国皇家研究所的达默就在美国工程师协会举办的座谈会第一次提到了集成电路的设想。他说:“可以想象,随着晶体管和半导体工业的发展,电子设备可以在一块固体块上实现,而不需要外部的连接线。这块电路将有绝缘层、导体和具有整流放大作用的半导体等材料组成”,这就是最早的集成电路的概念。 2通常所说的“芯片”是指集成电路,它是微电子产业的主要产品。
ardupilot(EKF)扩展卡尔曼滤波
ardupilot(EKF)扩展卡尔曼滤波 一、初识卡尔曼滤波器 为了描述方便我从网上找了一张卡尔曼滤波器的5大公式的图片。篇幅所限,下图所示的是多维卡尔曼滤波器(因为EKF2是多维扩展卡尔曼滤波器,所以我们从多维说起),为了跟好的理解卡尔曼滤波器可以百度一下,从一维开始。 这5个公式之外还有一个观测模型,根据你实际的观测量来确定,它的主 要作用是根据实际情况来求观测矩阵H。 因为卡尔曼滤波器是线性滤波器,状态转移矩阵A和观测矩阵H是确定的。在维基百科上状态转移矩阵用F表示。在ardupilot EKF2算法中,状态转移矩阵也是用F表示的。下面是维基百科给出的线性卡尔曼滤波器的相关公式。
上述更新(后验)估计协方差的公式对任何增益K k都有效,有时称为约瑟夫形式。为了获得最佳卡尔曼增益,该公式进一步简化为P k|k=(I-K k H k)P k|k-1,它在哪种形式下应用最广泛。但是,必须记住它仅对最小化残差误差的最佳增益有效。 为了使用卡尔曼滤波器来估计仅给出一系列噪声观测过程的内部状态,必须根据卡尔曼滤波器的框架对过程进行建模,这意味着指定一下矩阵:
只要记住一点就行了,卡尔曼滤波器的作用就是输入一些包含噪声的数据,得到一些比较接近真是情况的数据。比如无人机所使用的陀螺仪和加速度计的 读值,他们的读值都是包含噪声的,比如明明真实的角速度是俯仰2°/s,陀螺 仪的读值却是2.5°/s。通过扩展卡尔曼之后的角速度值会变得更加接近2o/s 的真实值,有可能是2.1o/s。 二、扩展卡尔曼滤波器 因为卡尔曼滤波器针对的是线性系统,状态转移模型(说的白话一点就是知道上一时刻被估计量的值,通过状态转移模型的公式可以推算出当前时刻被 估计量的值)和观测模型。注:有的资料显示状态模型中有,有的没有,目前 我也不清楚是为什么,有可能和被估计的对象有关。但看多了你就会发现不管 网上给的公式有怎样的不同,但总体的流程是一样的,都是这5大步骤。我个 人觉得维基百科给的公式较为标准。 因为扩展卡尔曼滤波器(EKF,Extended Kalman filter)的使用场景为非线性系统。所以上面两公式改写为下面所示的样子,我个人的理解是,因为是 非线性系统,所以没有固定的状态转移矩阵和观测矩阵。到这儿为止卡尔曼滤 波器到扩展卡尔曼滤波器的过度就完成了(多说一句,因为传感器的数据采样 是有时间间隔的,算法的运行也是有间隔的,所以本文提到的KF和EKF都是离散型的)。下面是扩展卡尔曼滤波器的相关公式。
SOC的软硬件协同设计方法和技术
SOC的软硬件协同设计方法和技术 摘要: 随着嵌入式系统与微电子技术的飞速发展,硬件的集成度越来越高,这使得将CPU、存储器和I/O设备集成到一个硅片上成为可能,SOC应运而生,并以其集成度高、可靠性好、产品问世周期短等特点逐步成为当前嵌入式系统设计技术的主流。传统的嵌入式系统设计开发方法无法满足Soc设计的特殊要求,这给系统设计人员带来了巨大的挑战和机遇,因此针对Soc的设计方法学己经成为当前研究的热点课题。 论文首先分析了嵌入式系统设计的发展趋势,论述了传统设计开发方法和工具的局限性,针对Soc设计技术的特点探究了Soc软硬件协同设计方法的流程,并讨论了目前软硬件协同设计的现状。 关键词: 软硬件协同设计,可重用设计,SOC 背景: 计算机从1946年诞生以来,经历了一个快速发展的过程,现在的计算机没有变成科幻片电影中那样贪婪、庞大的怪物,而是变得小巧玲珑、无处不在,它们藏身在任何地方,又消失在所有地方,功能强大,却又无影无踪,这就是嵌入式系统。嵌入式系统是以应用为中心、计算机技术为基础、软件硬件可剪裁、适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。嵌入式系统是将先进的计算机技术、微电子技术和现代电子系统技术与各个行业的具体应用相结合的产物,这一点决定了它必然是一个技术密集、高度分散、不断创新的知识集成系统。嵌入式系纫‘泛应用于国民经济和国防建设的各个领域,发展非常迅速,调查数据表明,嵌入式系统的增长为每年18%,大约是整个信息技术产业平均增长的两倍[1],目前世界上大约有2亿台通用计算机,而嵌入式处理器大约60亿个,嵌入式系统产业是二十一世纪信息产业的重要增长点。 随着集成电路制造工艺的飞速发展,嵌入式系统硬件的集成度越来越高,这使得将嵌入式微处理器、存储器、I/O设备等硬件组成部件集成到单个芯片上成为可能,片上系统SoC (System on Chip)应运而生[2]。SOC极大地缩小了系统体积;减少了板级系统SoB(System on Board)中芯片与芯片之间的互连延迟,从而提高了系统的性能; 强调设计重用思想,提高了设计效率,缩短了设计周期,减少了产品的上市时间。因此SOC以其集成度高、体积小、功耗少、可靠性好、产品问世周期短等优点得到了越来越广泛地应用,并且正在逐渐成为当前嵌入式系统设计的主流技术[3]。但Soc设计不同于传统嵌入式系统的开发,如何快速、有效地开发和设计Soc产品是当前嵌入式设计开发方法学的一个十分重要的研究领
扩展卡尔曼滤波(EKF)应用于GPS-INS组合导航
clear all; %% 惯性-GPS组合导航模型参数初始化 we = 360/24/60/60*pi/180; %地球自转角速度,弧度/s psi = 10*pi/180; %psi角度/ 弧度 Tge = 0.12; Tgn = 0.10; Tgz = 0.10; %这三个参数的含义详见参考文献 sigma_ge=1; sigma_gn=1; sigma_gz=1; %% 连续空间系统状态方程 % X_dot(t) = A(t)*X(t) + B(t)*W(t) A=[0 we*sin(psi) -we*cos(psi) 1 0 0 1 0 0; -we*sin(psi) 0 0 0 1 0 0 1 0; we*cos(psi) 0 0 0 0 1 0 0 1; 0 0 0 -1/Tge 0 0 0 0 0; 0 0 0 0 -1/Tgn 0 0 0 0; 0 0 0 0 0 -1/Tgz 0 0 0; 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0;]; %状态转移矩阵 B=[0 0 0 sigma_ge*sqrt(2/Tge) 0 0 0 0 0; 0 0 0 0 sigma_gn*sqrt(2/Tgn) 0 0 0 0; 0 0 0 0 0 sigma_gz*sqrt(2/Tgz) 0 0 0;]';%输入控制矩阵%% 转化为离散时间系统状态方程 % X(k+1) = F*X(k) + G*W(k) T = 0.1; [F,G]=c2d(A,B,T);
H=[1 0 0 0 0 0 0 0 0; 0 -sec(psi) 0 0 0 0 0 0 0;];%观测矩阵 %% 卡尔曼滤波器参数初始化 t=0:T:50-T; length=size(t,2); y=zeros(2,length); Q=0.5^2*eye(3); %系统噪声协方差 R=0.25^2*eye(2); %测量噪声协方差 y(1,:)=2*sin(pi*t*0.5); y(2,:)=2*cos(pi*t*0.5); Z=y+sqrt(R)*randn(2,length); %生成的含有噪声的假定观测值,2维X=zeros(9,length); %状态估计值,9维 X(:,1)=[0,0,0,0,0,0,0,0,0]'; %状态估计初始值设定 P=eye(9); %状态估计协方差 %% 卡尔曼滤波算法迭代过程 for n=2:length X(:,n)=F*X(:,n-1); P=F*P*F'+ G*Q*G'; Kg=P*H'/(H*P*H'+R); X(:,n)=X(:,n)+Kg*(Z(:,n)-H*X(:,n)); P=(eye(9,9)-Kg*H)*P; end %% 绘图代码 figure(1) plot(y(1,:)) hold on; plot(y(2,:)) hold off; title('理想的观测量'); figure(2)
扩展卡尔曼滤波器(EKF):一个面向初学者的交互式教程-翻译
扩展卡尔曼滤波器教程 在使用OpenPilot和Pixhawk飞控时,经常遇到扩展卡尔曼滤波(EKF)。从不同的网页和参考论文中搜索这个词,其中大部分都太深奥了。所以我决定创建自己学习教程。本教程从一些简单的例子和标准(线性)卡尔曼滤波器,通过对实际例子来理解卡尔曼滤波器。 Part 1: 一个简单的例子 想象一个飞机准备降落时,尽管我们可能会担心许多事情,像空速、燃料、等等,当然最明显是关注飞机的高度(海拔高度)。通过简单的近似,我们可以认为当前高度是之前的高度失去了一小部分。例如,当每次我们观察飞行高度时,认为飞机失去了2%的高度,那么它的当前高度是上一时刻高度的98%: altitude current_time=0.98*altitude previous_time 工程上对上面的公式,使用“递归”这个术语进行描述。通过递归前一时刻的值,不断计算当前值。最终我们递归到初始的“基本情况”,比如一个已知的高度。 试着移动上面的滑块,看看飞机针对不同百分比的高度变化。 Part 2:处理噪声 当然, 实际从传感器比如GPS或气压计获得测量高度时,传感器的数据或多或少有所偏差。如果传感器的偏移量为常数,我们可以简单地添加或减去这偏移量来确定我们的高度。不过通常情况下,传感器的偏移量是一个时变量,使得我们所观测到的传感器数据相当于实际高度加上噪声: observed_altitude current_time=altitude current_time+noise current_time 试着移动上面的滑块看到噪声对观察到的高度的影响。噪音被表示为可观测的海拔范围的百分比。
卡尔曼滤波器综述
卡尔曼滤波器综述 瞿伟军 G10074 1、卡尔曼滤波的起源 1960年,匈牙利数学家卡尔曼发表了一篇关于离散数据线性滤波递推算法的论文,这意味着卡尔曼滤波的诞生。斯坦利.施密特(Stanley Schmidt)首次实现了卡尔曼滤波器,卡尔曼在NASA埃姆斯研究中心访问时,发现他的方法对于解决阿波罗计划的轨道预测很有用,后来阿波罗飞船的导航电脑使用了这种滤波器。关于这种滤波器的论文由Swerling (1958)、Kalman (1960)与 Kalman and Bucy (1961)发表。 2、卡尔曼滤波的发展 卡尔曼滤波是一种有着相当广泛应用的滤波方法,但它既需要假定系统是线性的,又需要认为系统中的各个噪声与状态变量均呈高斯分布,而这两条并不总是确切的假设限制了卡尔曼滤波器在现实生活中的应用。扩展卡尔曼滤波器(EKF)极大地拓宽了卡尔曼滤波的适用范围。EKF的基本思路是,假定卡尔曼滤滤对当前系统状态估计值非常接近于其真实值,于是将非线性函数在当前状态估计值处进行台劳展开并实现线性化。另一种非线性卡尔曼滤波叫线性化卡尔曼滤波。它与EKF的主要区别是前者将非线函数在滤波器对当前系统状态的最优估计值处线性化,而后者因为预先知道非线性系统的实际运行状态大致按照所要求、希望的轨迹变化,所以这些非线性化函数在实际状态处的值可以表达为在希望的轨迹处的台劳展开式,从而完成线性化。 不敏卡尔曼滤波器(UKF)是针对非线性系统的一种改进型卡尔曼滤波器。UKF处理非线性系统的基本思路在于不敏变换,而不敏变换从根本上讲是一种描述高斯随机变量在非线性化变换后的概率分布情况的方法。不敏卡尔曼滤波认为,与其将一个非线性化变换线性化、近似化,还不如将高斯随机变量经非线性变换后的概率分布情况用高斯分布来近似那样简单,因而不敏卡尔曼滤波算法没
基于ARM的SoC设计入门.
基于ARM的SoC设计入门 2005-12-27 来源:电子工程专辑阅读次数: 1033 作者:蒋燕波 我们跳过所有对ARM介绍性的描述,直接进入工程师们最关心的问题。 要设计一个基于ARM的SoC,我们首先要了解一个基于ARM的SoC的结构。图1是一个典型的SoC的结构:
图1 从图1我们可以了解这个的SoC的基本构成: ARM core:ARM966E
?AMBA 总线:AHB+APB ?外设IP(Peripheral IPs):VIC(Vector Interrupt Controller), DMA, UART, RTC, SSP, WDT ?Memory blocks:SRAM, FLASH ?模拟IP:ADC, PLL 如果公司已经决定要开始进行一个基于ARM的SoC的设计,我们将会面临一系列与这些基本构成相关的问题,在下面的篇幅中,我们尝试讨论这些问题。 1. 我们应该选择那种内核? 的确,ARM为我们提供了非常多的选择,从下面的表-1中我们可以看到各种不同ARM内核的不同特点:
表1 ARM已经给出了基本的参考意见:
?如果您在开发嵌入式实时系统,例如汽车控制、工业控制或网络应用,则应该选择Embedded core。 ?如果您在开发以应用程序为主并要使用操作系统,例如Linux, Palm OS, Symbian OS 或Windows CE等等,则应选择Application core。 ?如果您在开发象Smart card,SIM卡或者POS机一样的需要安全保密的系统,则需要选择Secure Core。 举个例子,假如今天我们需要设计的是一个VoIP电话使用的SoC,由于这个应用不需要使用到操作系统,所以我们可以考虑使用没有MMU的内核。另外由于网络协议盏对实时性的要求较高,所以我们可以考虑ARM9系列的内核。又由于VoIP有语音编解码方面的需求,所以需要有DSP功能扩展的内核,所以ARM946E-S或ARM966E-S应该是比较合适的选择。 当然,在实际工作中的问题要比这个例子要复杂的多,比如在上一个例子中,我们也可以选择ARM7TDMI内核加一个DSP的解决方案,由ARM来完成系统控制以及网络协议盏的处理,由单独的DSP来完成语音编解码的功能。我们需要对比不同方案的面积,功耗和性能等方面的优缺点。同时我们还要考虑Cache size,TCM size,实际的内核工作频率等等相关问题,所以我们需要的一个能构快速建模的工具来帮助我们决定这些问题。现在的EDA工具为我们提供了这样的可能,例如Synopsys?的CCSS(CoCentric System Studio)以及Axys?公司的Maxsim?等工具都可以帮助我们实现快速建模,并在硬件还没有实现以前就可以提供一个软件的仿真平台,让我们在这个平台上进行软硬联仿,评估我们设想的硬件是否满足需求。 2.我们应该选择那种总线结构? 在提供内核给我们的同时,ARM也提供了多种的总线结构。例如ASB,AHB,AHB lite,AXI等等,在定义使用何种总线的同时,我们还要评估到底怎样的总线频率才能满足我们的需求,而同时不会消耗过多的功耗和片上面积。这就是我们平时常说的Architecture Exploration的问题。 和上一个问题一样,这样的问题也需要我们使用快速建模的工具来帮我们作决定。通常,这些工具能为我们提供抽象级别很高的TLM(Transaction Level Models)模型来帮助我们建模,常用的IP在这些工具提供的库中都可以找到,例如各种ARM core,AHB/APB BFM(Bus Function Model),DMAC以及各种外设IP。这些工具和TLM模型提供了比RTL仿真快100~10000倍的软硬联仿性能,并提供系统的分析功能,如果系统架构不能满足需要,那么瓶颈在系统的什么地方,是否是内核速度不够?总线频率太低?Cache太小?还是中断响应开销太多?是否需要添加DMA?等等,诸如此类的问题,我们多可以在工具的帮助下解决。
拓展卡尔曼滤波
南京航空航天大学 随机信号小论文题目扩展卡尔曼滤波 学生姓名梅晟 学号SX1504059 学院电子信息工程学院 专业通信与信息系统
扩展卡尔曼滤波 一、引言 20世纪60年代,在航空航天工程突飞猛进而电子计算机又方兴未艾之时,卡尔曼发表了论文《A New Approach to Linear Filtering and Prediction Problems》(一种关于线性滤波与预测问题的新方法),这让卡尔曼滤波成为了时域内有效的滤波方法,从此各种基于卡尔曼滤波的方法横空出世,在目标跟踪、故障诊断、计量经济学、惯导系统等方面得到了长足的发展。 二、卡尔曼滤波器 卡尔曼滤波是一种高效率的递归滤波器(自回归滤波器), 它能够从一系列的不完全及包含噪声的测量中,估计动态系统的状态。卡尔曼滤波的一个典型实例是从一组有限的,包含噪声的,对物体位置的观察序列(可能有偏差)预测出物体的位置的坐标及速度。 卡尔曼在NASA埃姆斯研究中心访问时,发现他的方法对于解决阿波罗计划的轨道预测很有用,后来阿波罗飞船的导航电脑便使用了这种滤波器。目前,卡尔曼滤波已经有很多不同的实现。卡尔曼最初提出的形式现在一般称为简单卡尔曼滤波器。除此以外,还有施密特扩展滤波器、信息滤波器以及很多Bierman, Thornton 开发的平方根滤波器的变种。也许最常见的卡尔曼滤波器是锁相环,它在收音机、计算机和几乎任何视频或通讯设备中广泛存在。 三、扩展卡尔曼滤波器 3.1 被估计的过程信号 卡尔曼最初提出的滤波理论只适用于线性系统,Bucy,Sunahara等人提出并研究了扩展卡尔曼滤波(Extended Kalman Filter,简称EKF),将卡尔曼滤波理论进一步应用到非线性领域。EKF的基本思想是将非线性系统线性化,然后进行卡尔曼滤波,因此EKF是一种次优滤波。 同泰勒级数类似,面对非线性关系时,我们可以通过求过程和量测方程的偏导来线性化并计算当前估计。假设过程具有状态向量x∈?n,其状态方程为非线性随机差分方程的形式。 x k=f x k?1,u k?1,w k?1(1.1) 观测变量z∈?m为: z k=?(x k,v k)(1.2) 随机变量w k和v k代表过程激励噪声和观测噪声。它们为相互独立,服从正态分布的白色噪声:
SOC设计方法
SOC设计方法 时间:2011-01-13 19:02:31 来源:作者: 本文通过对集成电路IC技术发展现状的讨论和历史回顾,特别是通过对电子整机设计技术发展趋势的探讨,引入系统芯片(System on Chip,简称SOC)的定义,主要特点及其设计方法学等基本概念,并着重探讨面向SOC的新一代集成电路设计方法学的主要研究内容和发展趋势。 关键词:SOC 软硬件协同设计超深亚微米高层次综合IP核设计再利用引言 人类进入21世界面临的一个重要课题就是如何面对国民经济和社会发展信息化的挑战。以网络通信、软件和微电子为主要标志的信息产业的飞速发展既为我们提供了一个前所未有的发展机遇,也营造了一个难得的市场与产业环境。 集成电路作为电子工业乃至整个信息产业的基础得益于这一难得的机遇,呈现出快速发展的态势。以软硬件协同设计(Software/Hardware Co-Design)、具有知识产权的内核(IP核)复用和超深亚微米(Very Deep Sub-M集成电路ron,简称VDSM)技术为支撑的SOC是国际超大规模集成电路(VLSI)的发展趋势和新世纪集成电路的主流。 与此同时,集成电路设计技术的进步滞后于集成电路制造技术的进步已成为制约未来集成电路工业进一步健康发展的关键。传统的、基于标准单元库的设计方法已被证明不能胜任SOC的设计;现行的面向逻辑的集成电路设计方法在深亚微米集成电路设计中遇到了难以逾越的障碍;芯片设计涉及的领域不再局限于传统的半导体而且必须与整机系统结合;集成电路设计工程师们从来没有像今天这样迫切地需要汲取新知识,特别是有关整机系统的知识。所以尽快开展面向SOC的新一代集成电路设计方法学研究对于推动集成电路的发展是至关重要的。 回顾20世纪后半叶集成电路工业的历史,不难看出著名的MOORE(摩尔)定律一直在准确地描述着集成电路技术的发展。专家们普遍认为,在新的世纪中,这一著名定律仍将长期有效。尽管MOORE定律揭示的集成电路工艺技术的进步规律是那样的诱人,且其发展速度之高在现代社会是少有的,但是今天正在蓬勃发展的网络技术的进步相比(见图1)还是相形见绌,远远不能满足信息产业发展的要求。
卡尔曼滤波器介绍
卡尔曼滤波器介绍 Greg Welch1and Gary Bishop2 TR95-041 Department of Computer Science University of North Carolina at Chapel Hill3 Chapel Hill,NC27599-3175 翻译:姚旭晨 更新日期:2006年7月24日,星期一 中文版更新日期:2007年1月8日,星期一 摘要 1960年,卡尔曼发表了他著名的用递归方法解决离散数据线性滤波问题的论文。从那以后,得益于数字计算技术的进步,卡尔曼滤波器已成为推广研究和应用的主题,尤其是在自主或协助导航领域。 卡尔曼滤波器由一系列递归数学公式描述。它们提供了一种高效可计算的方法来估计过程的状态,并使估计均方误差最小。卡尔曼滤波器应用广泛且功能强大:它可以估计信号的过去和当前状态,甚至能估计将来的状态,即使并不知道模型的确切性质。 这篇文章介绍了离散卡尔曼理论和实用方法,包括卡尔曼滤波器及其衍生:扩展卡尔曼滤波器的描述和讨论,并给出了一个相对简单的带图实例。 1welch@https://www.360docs.net/doc/6412796606.html,,https://www.360docs.net/doc/6412796606.html,/?welch 2gb@https://www.360docs.net/doc/6412796606.html,,https://www.360docs.net/doc/6412796606.html,/?gb 3北卡罗来纳大学教堂山分校,译者注。 1
Welch&Bishop,卡尔曼滤波器介绍2 1离散卡尔曼滤波器 1960年,卡尔曼发表了他著名的用递归方法解决离散数据线性滤波问题的论文[Kalman60]。从那以后,得益于数字计算技术的进步,卡尔曼滤波器已成为推广研究和应用的主题,尤其是在自主或协助导航领域。[Maybeck79]的第一章给出了一个非常“友好”的介绍,更全面的讨论可以参考[Sorenson70],后者还包含了一些非常有趣的历史故事。更广泛的参考包括[Gelb74,Grewal93,Maybeck79,Lewis86,Brown92,Jacobs93]。 被估计的过程信号 卡尔曼滤波器用于估计离散时间过程的状态变量x∈ n。这个离散时间过程由以下离散随机差分方程描述: x k=Ax k?1+Bu k?1+w k?1,(1.1)定义观测变量z∈ m,得到量测方程: z k=Hx k+v k.(1.2)随机信号w k和v k分别表示过程激励噪声1和观测噪声。假设它们为相互独立,正态分布的白色噪声: p(w)~N(0,Q),(1.3) p(v)~N(0,R).(1.4)实际系统中,过程激励噪声协方差矩阵Q和观测噪声协方差矩阵R可能会随每次迭代计算而变化。但在这儿我们假设它们是常数。 当控制函数u k?1或过程激励噪声w k?1为零时,差分方程1.1中的n×n 阶增益矩阵A将上一时刻k?1的状态线性映射到当前时刻k的状态。实际中A可能随时间变化,但在这儿假设为常数。n×l阶矩阵B代表可选的控制输入u∈ l的增益。量测方程1.2中的m×n阶矩阵H表示状态变量x k 对测量变量z k的增益。实际中H可能随时间变化,但在这儿假设为常数。滤波器的计算原型 定义?x?k∈ n(?代表先验,?代表估计)为在已知第k步以前状态情况下第k步的先验状态估计。定义?x k∈ n为已知测量变量z k时第k步的后验状态估计。由此定义先验估计误差和后验估计误差: ≡x k??x?k, e? k e k≡x k??x k 1原文为process noise,本该翻译作过程噪声,由时间序列信号模型的观点,平稳随机序列可以看成是由典型噪声源激励线性系统产生,故译作过程激励噪声。 UNC-Chapel Hill,TR95-041,July24,2006
基于扩展卡尔曼滤波器的永磁同步电机转速和磁链观测器.kdh
第27卷第36期中国电机工程学报V ol.27 No.36 Dec. 2007 2007年12月Proceedings of the CSEE ?2007 Chin.Soc.for Elec.Eng. 文章编号:0258-8013 (2007) 36-0036-05 中图分类号:TM 351 文献标识码:A 学科分类号:470?40 基于扩展卡尔曼滤波器的永磁同步电机 转速和磁链观测器 张 猛,肖 曦,李永东 (电力系统及发电设备控制和仿真国家重点实验室(清华大学电机系),北京市海淀区 100084) Speed and Flux Linkage Observer for Permanent Magnet Synchronous Motor Based on EKF ZHANG Meng, XIAO Xi , LI Yong-dong (State Key Lab of Control and Simulation of Power Systems and Generation Equipments (Dept. of Electrical Engineering, Tsinghua University), Haidian District, Beijing 100084, China) ABSTRACT: To eliminate the mechanical sensors of permanent magnet synchronous motor (PMSM) drive and get the stator flux linkage used in direct torque control (DTC), an extended Kalman filter (EKF) is established. The stator flux linkage on the fixed α-β coordinate, rotor speed and position are chosen as state variables. The input and output of the EKF are stator voltages and currents. The stator flux linkage and rotor speed are observed by EKF. DTC using space vector modulation (SVM) is applied to the system in order to reduce the torque ripples and keep constant switching frequency. The experimental test is carried out to verify the efficiency and robustness of the proposed sensor-less DTC system with speed and flux linkage observer. KEY WORDS: permanent magnet synchronous motor; extended Kalman filter; direct torque control; sensor-less; space vector modulation 摘要:为了取消永磁同步电机控制中的机械传感器,获得直接转矩控制中需要的电机磁链信息,设计了一种基于扩展卡尔曼滤波器的永磁同步电机转速和磁链估算方法。选取定子固定坐标系下定子磁链、电机转速和转子位置为状态变量,电压和电流作为输入、输出量,建立估算定子磁链、电机转速和转子位置的EKF滤波器系统。采用空间矢量调制的直接转矩控制策略,有效减小了直接转矩控制方法的转矩脉动,并保持了功率器件恒定的开关频率。实验结果表明EKF 准确地观测了电机转速和磁链,所构建的无速度传感器DTC 控制系统具有良好的转速和转矩控制性能。 基金项目:国家自然科学基金项目(50607010)。 Project Supported by National Natural Science Foundation of China (50607010).关键词:永磁同步电机;扩展卡尔曼滤波器;直接转矩控制;无速度传感器;空间矢量调制 0 引言 永磁同步电机直接转矩控制具有快速的转矩响应和良好的动态性能,吸引了很多学者进行相关研究,并取得了一定的研究成果[1-5]。在直接转矩控制当中,需要机械传感器提供电机的转速信息,机械传感器使系统复杂性增加,鲁棒性降低。磁链观测的准确性直接影响到转矩的控制性能。在无机械传感器的情况下,如何获得准确的速度和磁链信息是永磁同步电机直接转矩控制研究方面的热点问题。 传统的永磁同步电机直接转矩控制中磁链观测大多采用纯积分方法。初值的敏感性和直流漂移是纯积分方法的主要缺点。三种改进型积分器已经应用到异步电机磁链估算中[6],其中的第二种方法被用于永磁同步电机磁链的估算[7],但是在全速范围内只能够获得准确的相位信息。全阶观测器[8]和非线性反馈正交磁链补偿观测器[9]也被应用到永磁同步电机磁链观测中,但是此两种方法需要利用传感器或其他算法获得电机转速。 电机的转速可以通过对定子磁链位置变化或通过采用定子磁链和转矩角获得转子位置变化计算得到[10-11],但是需要在输出加一个低通滤波器以获得平滑的估算速度,滤波器的延时容易造成系统的不稳定。 基于扩展卡尔曼滤波器对非线性系统优异的状态估算能力,本文提出一种能同时观测速度和磁链的方法,实现了永磁同步电机的无速度传感器直接
SOC芯片介绍
关于SoC芯片设计技术 什么是SOC 随着设计与制造技术的发展,集成电路设计从晶体管的集成发展到逻辑门的集成,现在又发展到IP的集成,即SoC(System on a Chip)设计技术。SoC 可以有效地降低电子/信息系统产品的开发成本,缩短开发周期,提高产品的竞争力,是未来工业界将采用的最主要的产品开发方式。虽然SoC一词多年前就已出现,但到底什么是SoC则有各种不同的说法。在经过了多年的争论后,专家们就SoC的定义达成了一致意见。这个定义虽然不是非常严格,但明确地表明了SoC的特征: 实现复杂系统功能的VLSI; 采用超深亚微米工艺技术; 使用一个以上嵌入式CPU/数字信号处理器(DSP); 外部可以对芯片进行编程; 怎样去理解 SoC中包含了微处理器/微控制器、存储器以及其他专用功能逻辑,但并不是包含了微处理器、存储器以及其他专用功能逻辑的芯片就是SoC。SoC技术被广泛认同的根本原因,并不在于SoC可以集成多少个晶体管,而在于SoC可以用较短时间被设计出来。这是SoC的主要价值所在——缩短产品的上市周期,因此,SoC更合理的定义为:SoC是在一个芯片上由于广泛使用预定制模块 IP(Intellectual Property)而得以快速开发的集成电路。从设计上来说,SoC就是一个通过设计复用达到高生产率的硬件软件协同设计的过程。从方法学的角度来看,SoC是一套极大规模集成电路的设计方法学,包括IP核可复用设计/测试方法及接口规范、系统芯片总线式集成设计方法学、系统芯片验证和测试方法学。SOC是一种设计理念,就是将各个可以集成在一起的模块集成到一个芯片上,他借鉴了软件的复用概念,也有了继承的概念。也可以说是包含了设计和测试等更多技术的一项新的设计技术。 SOC的一般构成