电子齿轮
电子齿轮的设置
一、电子齿轮的概念:
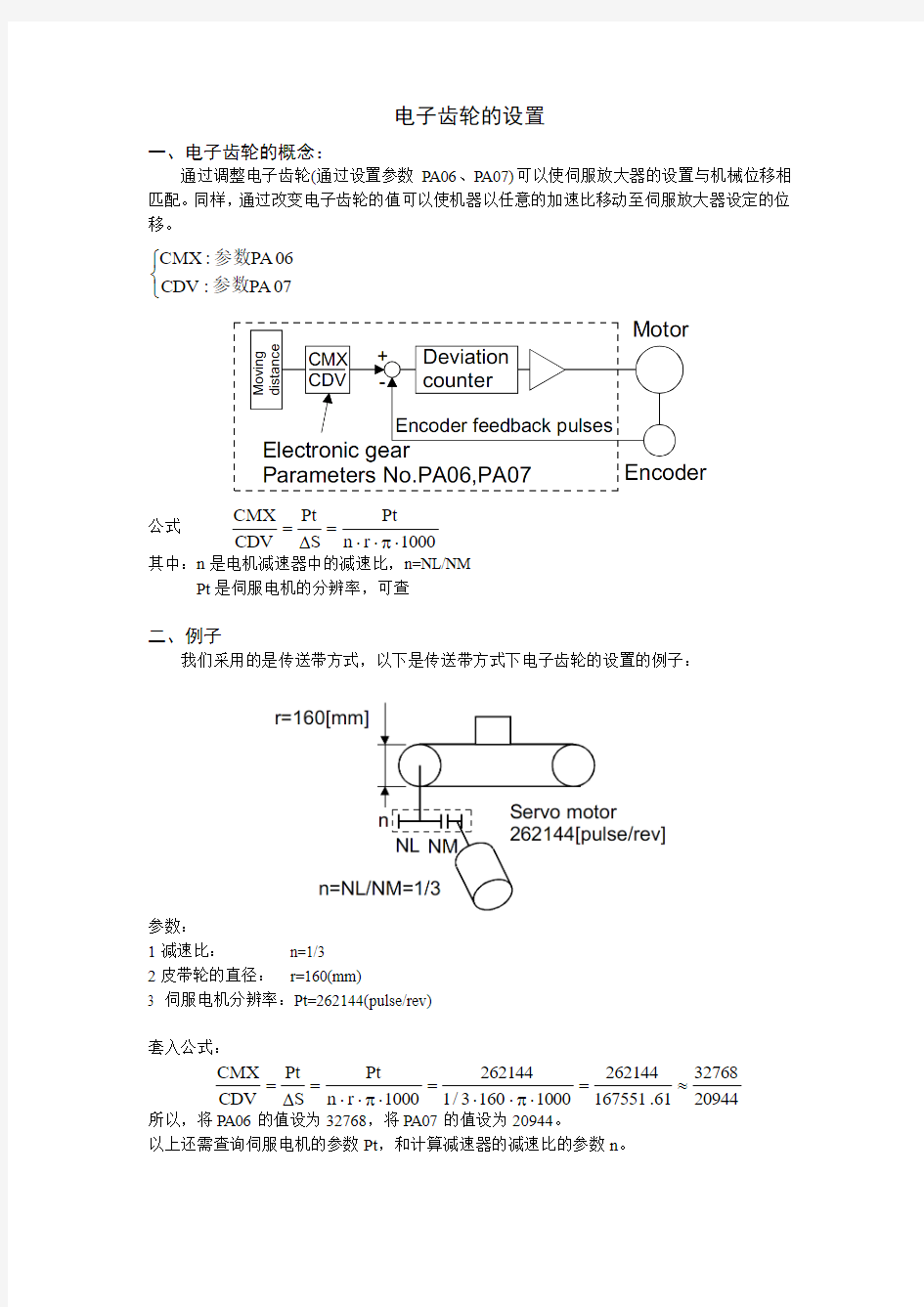
通过调整电子齿轮(通过设置参数PA06、PA07)可以使伺服放大器的设置与机械位移相匹配。同样,通过改变电子齿轮的值可以使机器以任意的加速比移动至伺服放大器设定的位移。
?
??07PA :CDV 06PA :CMX 参数参数
公式 1000
r n Pt S Pt CDV CMX ?π??=?= 其中:n 是电机减速器中的减速比,n=NL/NM
Pt 是伺服电机的分辨率,可查
二、例子
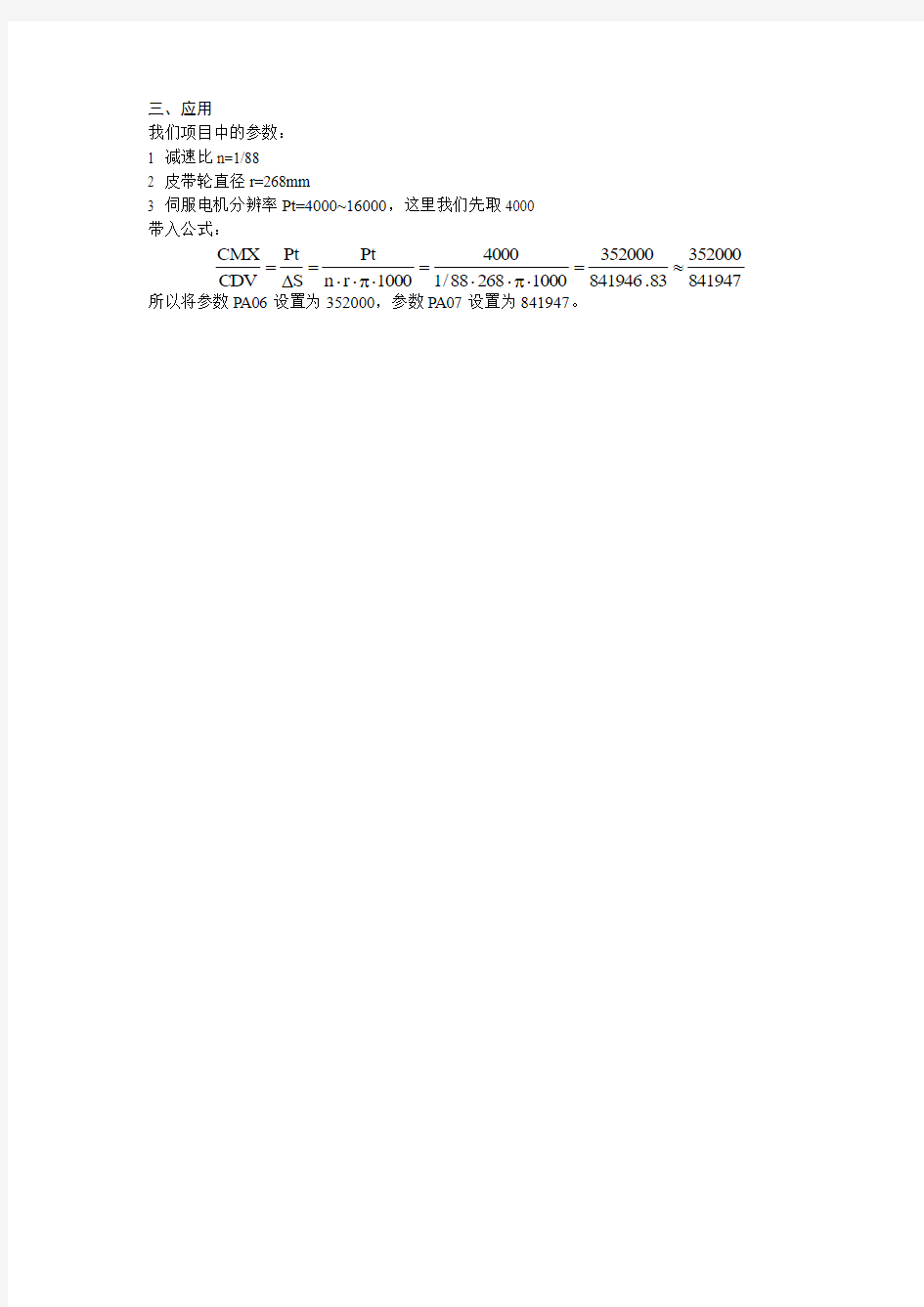
我们采用的是传送带方式,以下是传送带方式下电子齿轮的设置的例子:
参数:
1减速比: n=1/3
2皮带轮的直径: r=160(mm)
3 伺服电机分辨率:Pt=262144(pulse/rev)
套入公式:
20944
3276861.16755126214410001603/12621441000r n Pt S Pt CDV CMX ≈=?π??=?π??=?= 所以,将PA06的值设为32768,将PA07的值设为20944。
以上还需查询伺服电机的参数Pt ,和计算减速器的减速比的参数n 。
三、应用
我们项目中的参数:
1 减速比n=1/88
2 皮带轮直径r=268mm
3 伺服电机分辨率Pt=4000~16000,这里我们先取4000
带入公式:
84194735200083.841946352000100026888/140001000r n Pt S Pt CDV CMX ≈=?π??=?π??=?= 所以将参数PA06设置为352000,参数PA07设置为841947。
伺服电子齿轮比设置
2-50 以滚珠丝杠驱动机械为例示例。 设滚珠丝杠螺距为L [mm],则相对移动量指令P1[P]的滚珠丝杠实际移动量M [mm]如下式(1)所示。 M =P1×(D/E)×(1/R)×L …………………………(1)因此,位置分辨率(每1指令脉冲的移动量△M)如下式(2)所示。 ΔM =(D/E)×(1/R)×L …………………………(2)将公式(2)变形,指令分倍频比D 可由式(3)求得。 D =(ΔM×E×R)/L (3) 此外,相对于移动速度指令F 的滚珠丝杠实际移动速度V[mm /s]如式(4)所示,此时电机转速N 如下式(5)所示。 V =F×(D/E)×(1/R)×L (4) N =F×(D/E)×60 …………………………(5)将公式(5)变形,指令分倍频比D 可由式(6)求出。 D =(N×E)/(F×60) …………………………(6)①.位置分辨率ΔM 应考虑机械误差,参考值请为机械定位精度Δε的1/5?1/10左右。②.Pr0.09、Pr0.10值在1?230范围内可任意设定。 ③.设定值可用分母、分子值进行任意设定,但若设定为过分的分频比或倍频比,则无法保证该动作。关于可取分频、倍频比范围,请在1/1000?1000倍的范围之内使用。 .此外,即使为以上范围之内,若倍频比较高时,由于指令脉冲输入的不一致及噪音的影响,可能发生 Err27.2(指令脉冲倍频异常保护)的情况。 ④ 驱动器 编码器脉冲数:E [P/r] *1048576(=20bit) *131072(=17bit)电机的滚珠丝杠驱动示意图
2-511 在 使用 之 前3 连 接4 设 定5 调 整6 出现问题时7 资 料 关联页面?P.4-8「参数详情」
电子齿轮比是伺服中经常要用到的,初学者对这个参数的设置有时会不解
电子齿轮比计算样例 电子齿轮比是伺服中经常要用到的,初学者对这个参数的设置有时会不解,先介绍两个伺服电子齿轮设置方面的2个小例子,供大家参考下。 例子1:已知伺服马达的编码器的分辨率是131072 P/R,额定转速为3000r/min,上位机发送脉冲的能力为200Kpulse/s,要想达到额定转速,那么电子齿轮比至少应该设为多少? 计算如下图所示 根据上图中的算法,可以算出电子齿轮比CMX/CDV的值 例子2:已知伺服马达的分辨率是131072 P/R,滚珠丝杠的进给量为 Pb =8mm。 (1) 计算反馈脉冲的当量(一个脉冲走多少)? △Lo= (2) 要求指令脉冲当量为0.1um/p ,电子齿轮比应为多少? 电子齿轮比= (3) 电机的额定速度为3000rpm,脉冲频率应为多少? Fc= 解答: (1) 计算反馈脉冲的当量(一个脉冲走多少)? △Lo= 8mm/131072 (2) 要求指令脉冲当量为0.1um/p ,电子齿轮比应为多少? △Lo×电子齿轮比×1000=0.1 (3) 电机的额定速度为3000rpm,脉冲频率应为多少? Fc×电子齿轮比=3000/60×131072 电子齿轮比与脉冲当量相关计算 1、什么是机械减速比(m/n) 答:机械减速比的定义是减速器输入转速与输出转速的比值,也等于从动轮齿数与主动轮齿数的比值。在数控机床上为电机轴转速与丝杠转速之比。 2、什么是电子齿轮比 答:电子齿轮比就是对伺服接受到上位机的脉冲频率进行放大或者缩小,其中一个参数为分子,一个为分母。如分子大于分母就是放大,如分子小于分母就是缩小。例如:上位机输入频率100HZ,电子齿轮比分子设为1,分母设为2,那么伺服实际运行速度按照50HZ的脉冲来进行。上位机输入频率100HZ,电子齿轮比分子设为2,分母设为1,那么伺服实际运行速度按照200HZ的脉冲来进行3、怎样计算电子齿轮比(B/A) 明白几个概念: 编码器分辨率(F):伺服电机轴旋转一圈所需脉冲数。看伺服电机的铭牌,在对驱动器说明书既可确定编码器的分辨率。 每转脉冲数(f):丝杠转动一圈所需脉冲数。
齿轮传动比计算汇总
在图示的轮系中。已知z1=20, z2 =40, z2’ =20, z3 =30, z3’ =20, z4=40,求轮系的速比i14,并确定轴O 1和轴O 4的转向是相同还是相反? 6202020403040'3'214324114=????===z z z z z z n n i 在图示的轮系中,z1=16,z2=32, z3= 20, z4= 40, z5= 2(右旋蜗杆), z6= 40,若n1=800 r /min ,求蜗轮的转速n6并确定各轮的转向。 80220164040325316426116=????===z z z z z z n n i min /10808001616r i n n === 顺时针方向 如图轮系中,已知各轮齿数z1=28,z2=18,z2’=24,z3=70。求传动比i1H 。 '21321313113 )1(z z z z n n n n n n i H H H H H -=--== 202020403040'3'2143241????===z z z z z z n n 202020403040'3'2143241=????===z z z z z z n n 2 201640403253164261????===z z z z z z n n 875.124 28701801-=??-=--H H n n n
875.2875.1111=+==H H n n i 已知轮系中各轮齿数为z1=48,z2=48,z2’=18,z3=24,n1=250r/min ,n3= 100r/min ,转向如图中实线箭头所示。试求系杆的转速nH 的大小及方向。 解:划箭头得,转化轮系中齿轮1、3的转向相反。 18 482428100250??-=---H H n n 在图示轮系中,已知Z1=17,Z2=20,Z3=85,Z4=18,Z5=24,Z6=21,Z7=63,求: (1)当n1=10001r/min ,n4=10000r/min 时,np=? (2)当n1=n4时,np=? (3)当n1=10000r/min ,n4=10001r/min 时,np=? 解:nP=n7 421 186324)1(6475174-=??-=-=--z z z z n n n n H H 517 8512132231==-=z z z z n n )( H n n n ==132.0 (1)np=0.25 (2)np=0 (3)np= -0.25 在图示轮系中,各轮齿数Z1=32,Z2=34,Z2'=36,Z3=64,Z4=32,Z5=17,Z6=24,轴Ⅰ按图示方向以1250r /min 的转速回转,而轴VI 按图示方向以600r/min 的转速回转。试求 875.111-=+- H n n '2132 31z z z z n n n n H H -=--517 8512132231==-=z z z z n n )(
电子齿轮比与脉冲当量相关计算
电子齿轮比与脉冲当量相关计算1、什么是机械减速比(m/n) 答:机械减速比的定义是减速器输入转速与输出转速的比值,也等于从动轮齿数与主动轮齿数的比值。在数控机床上为电机轴转速与丝杠转速之比。 2、什么是电子齿轮比 答:电子齿轮比就是对伺服接受到上位机的脉冲频率进行放大或者缩小,其中一个参数为分子,一个为分母。如分子大于分母就是放大,如分子小于分母就是缩小。例如:上位机输入频率100HZ,电子齿轮比分子设为1,分母设为2,那么伺服实际运行速度按照50HZ的脉冲来进行。上位机输入频率100HZ,电子齿轮比分子设为2,分母设为1,那么伺服实际运行速度按照200HZ的脉冲来进行3、怎样计算电子齿轮比(B/A) 明白几个概念:
编码器分辨率(F):伺服电机轴旋转一圈所需脉冲数。看伺服电机的铭牌,在对驱动器说明书既可确定编码器的分辨率。每转脉冲数(f):丝杠转动一圈所需脉冲数。 脉冲当量(p):数控系统(上位机)发出一个脉冲时,丝杠移动的直线距离或旋转轴转动的度数,也是数控系统所能控制的最小距离。这个值越小,经各种补偿后越容易到更高的加工精度和表面质量。脉冲当量的设定值决定机床的最大进给速度,当进给速度速度满足要求的情况下,可以设定较小的脉冲当量。 螺距(d):螺纹上相邻两牙对应点之间的轴向距离。 电子齿轮比计算公式如下: 4、步进电机脉冲当量和细分数的关系 在实际调整时可先确定脉冲当量,在根据关系式计算细分数。或先确定细分
数,在计算脉冲当量。 其中:x表示步进驱动器细分数,θ表示步进电机步距角。 5、关于旋转轴 与直线运动轴相比区别在于:旋转轴的螺距值为360,其它计算相同,只需将螺距值换为360。
轮系传动比计算(机械基础)教案
教案首页
科目:机械基础(第四版)授课班级:08级模具(1)班授课地点:多媒体教室(一)室
课时:2课时 课题:§6—2 定轴轮系的传动比 授课式:讲授 教学容:定轴轮系的传动比及其计算举例 教学目标:能熟练进行定轴轮系传动比的计算法及各轮回转向的判定 选用教具:三角板、圆规、平行轴定轴轮系模型、非平行轴定轴轮系模型 教学法:演示法、循序渐进教学法、典型例题法 第一部分:教学过程 一、复习导入新课(约7分钟) (一)组织教学(2分钟) 学生点名考勤,课前6S检查,总结表扬上次优秀作业学生,调节课堂气氛,调动学生主动性。 (二)教学回顾(2分钟) 1、什么是轮系? 2、轮系有什么应用特点? 3、轮系的分类依据是什么?可分为哪几类? 4、什么是定轴轮系?(让学生回顾上次课的容) (三)复习,新课导入(2分钟) 演示减速器、车床主轴箱、钟表机构等,我们看到的这些都是定轴轮系的应用,请问:我们生活中常见钟表里的时针走一圈,分针走了12圈,秒针走了720圈,那么由时针到秒针是如实现传动的?时针把运动传到秒针时,其转速大小有变化?具体比值如
确定? (四)教学容介绍(1分钟) 重点:定轴轮系的传动路线的分析、传动比的计算及各轮回转向的判定。 难点:非平行轴定轴轮系传动比公式推导及各轮回转向的判定。 二、新课讲解(约32分钟) (一)定轴轮系的传动比概念(2分钟) 教师先展示定轴轮系模型,引导学生参与到演示教学中来,通过一对齿轮的传动比概念,教师提出问题:定轴轮系的传动比是否就是输入轴的转速与输出轴的转速之比?引发学生思考。演示得出定轴轮系的概念:定轴轮系的传动比是指首末两轮的转速之比。 (二)知识分解(12分钟) 对于定轴轮系,我们不但要能求出传动比的大小,还要能确定末轮的回转向。如车床主轴箱,我们知道了电动机的转速和旋转向,主轴的转速和旋转向从而得?因此,我们先把定轴轮系分解为各对齿轮副,如果知道了各对齿轮副的传动比大小和回转向,那总的传动比大小和末轮的回转向就不得而知了。 1、齿轮副的作图 讲解轴承与固定齿轮的作图表示法,引出、外啮合圆柱齿轮副、圆锥齿轮副、蜗轮蜗杆副和齿轮齿条的作图。 2、齿轮副的传动比和回转向(重点容) (1)一对圆柱齿轮: ①传动比i :外啮合:i =1221 z z n n -=;啮合: i =1221z z n n +=。 ②回转向:a 、用传动比表示:i 的结果为正值,表示两轮的回转向相同;为负值,表示回转向相反。b 、用箭头表示:用相同指向的箭头表示回转向相同;相反指向的箭头表示回转向相反。(口诀:外改同) (2)一对圆锥齿轮: ①传动比i :i =1221 z z n n =。②回转向:只能用箭头表示,箭头应同时指向或同时背离啮 合点。(口诀:同时指向或背离)
电子齿轮比计算公式
电子齿轮比计算公式 已知伺服马达的分辨率是131072 P/R,滚珠丝杠的进给量为Pb =8mm。 (1) 计算反馈脉冲的当量(一个脉冲走多少)?△Lo= (2) 要求指令脉冲当量为0.1um/p ,电子齿轮比应为多少? 电子齿轮比= (3) 电机的额定速度为3000rpm,脉冲频率应为多少? Fc= 解答: (1) 计算反馈脉冲的当量(一个脉冲走多少)? △Lo= 8mm/131072 (2) 要求指令脉冲当量为0.1um/p ,电子齿轮比应为多少? △Lo×电子齿轮比×1000=0.1 (3) 电机的额定速度为3000rpm,脉冲频率应为多少? Fc×电子齿轮比=3000/60×131072 已知编码器分辨率131072脉冲频率200Khz要使转速达到3000r/min求电子齿轮比。 脉冲接口的最大频率是200KHZ,对应最大转速3000转每分,这样
的设定能使定位模块发挥伺服的最高速。 代入以下公式: 马达转速(3000rpm) / 60 = 脉冲频率(200000Hz)* (分子/分母)/ 伺服分辨率(131072) 约分下来电子齿轮分子4096 ,电子齿轮分母125 这样的设置结果4000个脉冲转一圈,200Khz的频率对应3000RPM 的转速 将伺服马达编码器的分辨率设为分子,马达转一圈所需的脉冲数设为分母” 如果再装减速器的话,PLC原来所发脉冲数再乘以减比。 以三菱MR-J2-S举个例子: 伺服马达编码器的分辨率131072,我设计为PLC每发一个脉冲伺服马达转0.5度,那么伺服马达转一圈(360。)需要720个脉冲,电子齿轮就设为131072 / 720 化简分数后为8192 / 45 这样PLC每次发720个脉冲伺服马达转一圈 如果还想接个减速器,举个例子接个减比为5比1的减速器时,原来电子齿轮所设分数不变,PLC原来所发脉冲数再乘以5(720*5=3600),即现在伺服马达转一圈PLC发3600个脉冲就可以了。
电子齿轮比的设置
刘金桂
电子齿轮比的设置方法 ?1.以电机最高转速为目的的设置?2.以机构分辨率为目的的设置?3.设置举例 ?4.电子齿轮比设置讨论
1. 以电机最高转速为目的的设置 ?P command (位置伺服)驱动器必须有电子齿轮比功能,才能顺利地与伺服控制器配合,其设置有不同的方法及目的。电子齿轮比一般分成分母及分子两项参数设置。 ?伺服电机旋转时,速度表现重于精度表现,希望能将伺服电机速度性能完全表现出来;而对旋转分辨率要求较低时,建议采用下列设置方法。 假设欲设置的伺服电机额定转速为 3000r/ min ,编码器每圈脉冲数 为 8192 pulse/revo,当控制器的脉冲输出最高频率只能为 l00kHz 时
本例中,暂时忽略结构条件 ,故所有操作数中均未使用长度操作数 ; 而实际应用中必须考虑最终传动机构的分辨率问题 ,不可只追求速度而 忽略分辨率 ,否则此伺服系统终将无法使用 。为安全考虑,用 10kHz 输入脉冲进行转速测量为好 ,慢速测试可降 低风险 。 电子齿轮比为:45 1441--==P P CDV CMX 分母分子
2 .以机构分辨率为目的的设置 ? 伺服电机普遍应用于加工控制及操作 ,此时的要求应于进给速度 ,当加工精度达到后再考虑速度问题。 因此,建议优先考虑分辨率进行电子齿轮比设置 。因输出脉冲 频率将影响分辨率 ,电子齿轮比的设置还必须考虑控制器输出 脉冲频率 ,不可任意放大 。
?假设欲设置的伺服电机额定转速为 3000r/ min ,编码器每圈脉冲数 为 8192pulse/rev;控制器脉冲输出最高频率为 l00kHz;伺服电机输出轴连接减速机构 ,输入转速 :输出转速 m : n= 3;减速机构输出轴连接机构为导程( pitch) 10mm 的滚珠丝杠 ,如图 1. 38 所示 。若希望控制器的输出分辨率为 lμm/pulse ,试设计电子齿轮比。
(整理)典型传动机构的装配.
典型传动机构的装配 一、齿轮传动机构的装配 齿轮传动是各种机械中最常用的传动方式之一,可用来传递运动和动力,改变速度的大小或方向,还可把传动变为移动。 齿轮传动在机床、汽车、拖拉机和其他机械中应用很广泛,其原因是具有以下特点:能保证一定的瞬时传动比,传动准确可靠,传递的功率和速度变化范围大,传动效率高,使用寿命长以及结构紧凑,体积小等,但也有一定缺点,如噪音大,传动不如带传动平稳,齿轮装配和制造要求高等。 齿轮传动装置是由齿轮副、轴、轴承和箱体等主要零件组成,齿轮传动质量的好坏,与齿轮的制造和装配精度有着密切关系。 1.齿轮传动的精度要求 1)传递运动的精确性,由齿轮啮合原理可知,在一对理论的渐开线齿轮传动过程 中,两齿轮之间的传动比是确定的,这时传递运动是准确的。但由于不可避免 地存在着齿轮的加工误差和齿轮副的装配误差,使两轮的传动比发生变化。从 而影响了传递运动的准确性,具体情况是,在从动轮转动360°的过程中,两 轮之间的传动比成一个周期性的变化,其转角往往不同于理论转角,即发生了 转角误差,而导致传动运动的不准确,这种转角误差会影响产品的使用性能, 必须加以限制。 2)传动的平稳性,齿轮传动过程中发生冲击、噪音和振动等现象,影响齿轮传动 的平稳性,关系到机器的工作性能、能量消耗和使用寿命以及工作环境等。因 此,根据机器不同的使用情况,提出相应的齿轮传动平稳性要求,产生齿轮传 动不平稳的原因,主要是由于传动过程中传动比发生高频地瞬时突变的结果。 在从动齿轮转一转的过程中,引起传递不准确的传动比变化只有一个周期,而引起传动不平稳的传动比变化有许多周期,两者是不同的,实际上在齿轮传 动过程中,上述两种传动比的变化同时存在。 3)载荷分布的均匀性,两齿轮相互啮合的齿面,在传动过程中接触情况如何,将 影响到被传递的载荷是否能均匀的分布在齿面上,这关系到齿轮的承载能力, 也影响到齿面的磨损情况和使用寿命。 4)传动侧隙的合理性,传动侧隙是指齿轮传递过程中,一对齿轮在非工作齿面间 所形成的齿侧间隙。不同用途的齿轮,对传动侧隙的要求不同,因此,应合理 的确定其数值,一般传递动力和传递速度的齿轮副,其侧隙应稍大,其作用是 提供正常的润滑所必须的储油间隙,以及补偿传动时产生的弹性变形和热变 形,对于需要经常正转或者反转的传动齿轮副,其传动侧隙应小些,以免在变 换转向时产生空程和冲击。 当齿轮传动的用途和工作条件不同时,对上述四个方面的要求也不同,现概述如下:在高速大功率机械传动中用的齿轮(如汽轮机减速器中的齿轮),对传动平稳性和载荷分布均匀性的要求特别高,至于影响传递运动准确性的传动比变化,虽然每转只有一个周期,但当转速高时,也会影响传动的平稳性,因此,对传递运动的准确性的要求也要高。 对于承受重载,低速传动齿轮(如轧钢机,矿山机械和起重机械中的齿轮),由于模数大,齿面宽且受力大,因此对载荷分布的均匀性要求也较高,另外为了补偿受力后齿轮发生的弹性变形,也要求有较大的传动侧间隙,至于传动平稳性和传递运动的准确性两个方面,因为转速低且不要严格的转角精度,所以要求不高。 对于分度机构和读数装置及精密仪表中需要精确传递动力小,模数小,齿的宽度也小,因此对在和分布均匀性的要求不高,如需正、反向传动,还应尽量较少传动侧隙。
电子齿轮比计算公式
对于那些想学习PLC的人来说,第一件事就是控制伺服电机。要控制伺服电机,必须联系电子传动比的概念。这是从初学者到初学者的门槛。很多人被困在这里,无法进入。虽然你可以通过别人的文章或介绍粗略地设置电子传动比,但总是毫无意义。因此,今天笔者将详细介绍电子传动比的相关概念和设置方法,为大家解决难题。 1齿轮传动比 我相信每个人都熟悉齿轮。通常,齿轮成对出现。两个齿轮的模数相同,但齿数不同。这样,旋转后就会形成速度差。通常,产生这种速度差的方法称为传动比:干货:电子传动比的超详细计算方法 在上图中,大齿轮和小齿轮的传动比为2:1,因此传动比为1:2。小轮旋转两次,大轮子旋转一次。电动机驱动小轮,小轮作驱动轮,大轮作从动轮,减速比为1:2。 2电子传动比
在物理上理解了传动比后,更容易理解电子传动比,因为电机的控制是由上位机发送的脉冲,电机的转速是由编码器测量的。然而,当伺服电机旋转时,主机发送的脉冲数与测量到的脉冲数之间没有一一对应关系。它们之间有一个比率,叫做“比率”。 干货:电子传动比的超详细计算方法 改变 干货:电子传动比的超详细计算方法 第一种情况:伺服电机直接连接到丝杠上 干货:电子传动比的超详细计算方法 此时减速比为1:1,螺距设置为5mm,伺服电机编码器的分辨率为131072。当我们要上位机发送脉冲时,丝杠移动0.001mm,螺杆移动5mm,上位机需要发送5000个脉冲,电机旋转一次,编码器采集的值为131072,电子传动比为: 干货:电子传动比的超详细计算方法
由于分子和分母同时除以最大公约数8,电子齿轮的分子为16384,分母为625。当然,你也可以直接写分子为131072,分母为5000 在第二种情况下,伺服电机和丝杠通过减速机构连接 干货:电子传动比的超详细计算方法 假设减速比为2:3,伺服电机旋转3次,丝杠旋转2次,计算减速比,使每5000脉冲达到5mm。丝杠旋转一圈(5mm),电机旋转1.5圈(3/2=1.5),编码器采集的实际值为131072*3/2,电子传动比为 干货:电子传动比的超详细计算方法 分子是24576分母是625。这是电子传动比算法。 三。每转脉冲数 同时,伺服电机还可以设定每转脉冲数,因此不需要花费脑细胞来计算电子传动比。实际原理与电子传动比的形式相同,但方法简单。或者以上面的例子为例。如果电机每转10000脉冲,减速比为2:3,螺杆旋转一圈,行走距离为5mm,当螺杆旋转2时,电机接收10000
电子齿轮比的计算
电子齿轮比计算样例 CMX:电子齿轮比的分子是电机编码器反馈脉冲。 CDV:电子齿轮比的分母是上位机的给定脉冲(指令脉冲)。 电子齿轮比是伺服中经常要用到的,初学者对这个参数的设置有时会不解,先介绍两个伺服电子齿轮设置方面的2个小例子,供大家参考下。 例子1:已知伺服马达的编码器的分辨率是131072 P/R,额定转速为3000r/min,上位机发送脉冲的能力为200Kpulse/s,要想达到额定转速,那么电子齿轮比至少应该设为多少? 计算如下图所示 根据上图中的算法,可以算出电子齿轮比CMX/CDV的值 例子2:已知伺服马达的分辨率是131072 P/R,滚珠丝杠的进给量为 Pb =8mm。 (1) 计算反馈脉冲的当量(一个脉冲走多少)? △Lo= (2) 要求指令脉冲当量为0.1um/p ,电子齿轮比应为多少? 电子齿轮比= (3) 电机的额定速度为3000rpm,脉冲频率应为多少? Fc= 解答: (1) 计算反馈脉冲的当量(一个脉冲走多少)? △Lo= 8mm/131072 (2) 要求指令脉冲当量为0.1um/p ,电子齿轮比应为多少? △Lo×电子齿轮比×1000=0.1 (3) 电机的额定速度为3000rpm,脉冲频率应为多少? Fc×电子齿轮比=3000/60×131072 电子齿轮比与脉冲当量相关计算 1、什么是机械减速比(m/n) 答:机械减速比的定义是减速器输入转速与输出转速的比值,也等于从动轮齿数与主动轮齿数的比值。在数控机床上为电机轴转速与丝杠转速之比。 2、什么是电子齿轮比 答:电子齿轮比就是对伺服接受到上位机的脉冲频率进行放大或者缩小,其中一个参数为分子,一个为分母。如分子大于分母就是放大,如分子小于分母就是缩小。例如:上位机输入频率100HZ,电子齿轮比分子设为1,分母设为2,那么伺服实际运行速度按照50HZ的脉冲来进行。上位机输入频率100HZ,电子齿轮比分子设为2,分母设为1,那么伺服实际运行速度按照200HZ的脉冲来进行3、怎样计算电子齿轮比(B/A) 明白几个概念: 编码器分辨率(F):伺服电机轴旋转一圈所需脉冲数。看伺服电机的铭牌,在对驱动器说明书既可确
三菱伺服电子齿轮比算法
三菱伺服电子齿轮比算法 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 三菱MR-J2S 伺服放大器电子齿轮比 电子齿轮比的分子是电机编码器分辨率(反馈脉冲)CMX,分母是电机旋转一圈所需要的脉冲数(指令脉冲)CDV。 电子齿轮比就是电机编码器反馈脉冲与指令脉冲的一个比值。 电子齿轮比是通过更改电子齿轮比的分倍频,来实现不同的脉冲当量。 举例公式计算解析: 已知伺服电机编码器分辨率是131072,额定转速为3000R/MIN,上位机发出脉冲能力为200Kp/S,那么电子齿轮设置为多少? 如果不设置电子齿轮比,用默认值,速度是:200×1000×60 ∕131072 = 91.55 r/min
200×1000×(CMX/CDV)= (3000∕60)×131072 ,CMX/CDV = 4096 /125 200×1000×60:题中上位机发送脉冲的能力为200Kpuise(脉冲)/s ,所以每秒发出脉冲数是200×1000,60是一分钟60s 。一分钟上位机发送200×1000×60个脉冲。131072 p/r:三菱MR-J2S伺服放大器编码器的分辨率。也就是说三菱MR-J2S伺服电机接受到131072个脉冲转一圈。 200×1000×60 ∕131072 = 91.55 r/min :上位机每分钟发出的脉冲除以三菱MR-J2S伺服放大器编码器的分辨率等于伺服电机每分钟的旋转圈数(速度)。 200×1000×(CMX/CDV)= (3000∕60)×131072 3000 ∕60 :伺服电机的额定转速是3000 r / min ,每秒的转速则:(3000∕60)r / s ,因为上位机发出的脉冲是200X1000 puise / s ,所以计算时都要用相同的计量单位。(3000∕60)×131072 :伺服电机每秒钟旋转的脉冲数。 上面公式的解析:上位机每秒钟发出的脉冲数X电子齿轮比= 伺服电机每秒钟旋转的脉冲数。 转化:电子齿轮比= 伺服电机每秒钟旋转的脉冲数∕上位机每秒钟发出的脉冲数 三菱MR-J2S伺服放大器的电子齿轮设定范围:1/50 <CMX/CDV <500
电子齿轮比设定方法
电子齿轮比: 如丝杠导程为5mm,电机与丝杠直连,那么,电机转一圈负载移动5mm。若要求精度为0.001mm,那么电机要5000个脉冲才转一圈;若要求精度为0.002mm,那么电机要2500个脉冲才转一圈;等等。 电子齿轮比的分子是电机编码器分辨率,分母为电机旋转一圈所需要的脉冲数。 电子齿轮比是通过更改电子齿轮比的分倍频,来实现不同的脉冲当量。 伺服系统的精度是编码器的线数决定,但这个仅仅是伺服电机的精度。 在实际运用中,连接不同的机械结构,如滚珠丝杠,蜗轮蜗杆副,螺距、齿数等参数不同,移动最小单位量所需的电机转动量是不同的。 电子齿轮比是匹配电机脉冲数与机械最小移动量的 举个例子: 车床用10mm丝杠,那么电机转一圈机械移动10mm,每移动0.001mm就需要电机旋转1/10000圈 而如果连接5mm丝杠,且直径编程的话,每0.001的移动量就需要1/5000转 这个是电子齿轮的作用。 电子齿轮就电机编码器反馈脉冲与指令脉冲的一个比值 电子齿轮功能是指可将相当于指令控制器输入指令1脉冲的工件移动量设定为任意值的功能,分为电子齿轮(分子)Pn 202、电子齿轮(分母)Pn 203两部分参数。 在无减速比条件下设定时,根据当前电机的编码器规格把相对应的编码器脉冲数 13位:2048P/R 16位:16384P/R 17位:32768P/R 乘以分频比4后,写入Pn 202。将负载轴旋转一圈的脉冲数写入Pn 203。 例如:电机的编码器规格为16位时,把16384*4=65535写入电子齿轮(分子)Pn 202 想要36000个脉冲转一圈的话,在电子齿轮(分母)Pn 203中写入36000 伺服电机每转一圈的脉冲数 是由编码器的位数和电子齿轮比决定的. 例如编码器是13位,电子齿轮比是4,那么脉冲数=2的13次方/4=2048 伺服电机编码器脉冲数是2的n次方,以2的16次方来说,就是65536,即电机每转一圈就会产生65536个脉冲,反过来说,如果齿轮比是1/1,就是发送65536个脉冲给伺服器,电机就会转一圈,要使伺服电机转X圈,就得发送65536*X个脉冲,如果要电机转的圈数很多,脉冲数将会很大,所以要设一个合适的齿轮比,使PLC发送的脉冲数不会很大,又能满足精度要求.(下面的话比较容易理解,请注意)一般最好设置2的整数次方,比如256,那么意思是PLC发送一个脉冲,就相当于给伺服器发送了256个脉冲,要使电机转一圈,只需要发65536/256=256个脉冲就行
轮系及其传动比计算
第八章 轮系及其传动比计算 第四十八讲 齿轮系及其分类 如图8—1所示,由一系列齿轮相互啮合而组成的传动系统简称轮系。根据轮系中各齿轮运动形式的不同,轮系分类如下: ???? ? ? ?? ????? ?==?? ?成由几个周转轮系组合而和周转轮系混合而成或混合轮系:由定轴轮系)行星轮系()差动轮系(周转轮系(轴有公转)空间定轴轮系平面定轴轮系 定轴轮系(轴线固定)轮系12F F 图8—1 图8—2 图8—3 定轴轮系中所有齿轮的轴线全部固定,若所有齿轮的轴线全部在同一平面或相互平行的平面内,则称为平面定轴轮系,如图8—1所示,若所有齿轮的轴线并不全部在同一平面或相互平行的平面内,则称为空间定轴轮系;若轮系中有一个或几个齿轮轴线的位置并不固定,而是绕着其它齿轮的固定轴线回转,如图8—2,8—3所示,则这种轮系称为周转轮系,其中绕着固定轴线回转的这种齿轮称为中心轮(或太阳轮),即绕自身轴线回转又绕着其它齿轮的固定 轴线回转的齿轮称为行星轮,支撑行星轮的构 图8—4 件称为系杆(或转臂或行星架),在周转轮系中,一般都以中心轮或系杆作为运动的输入或输出构件,常称其为周转轮系的基本构件;周转轮系还可按其所具有的自由度数目作进一步的划分;若周转轮系的自由度为2,则称其为差动轮系如图8—2所示,为了确定这种轮系的运动,须给定两个构件以独立运动规律,若周转轮系的自由度为1,如图8—3所示,则称其为行星轮系,为了确定这种轮系的运动,只须给定轮系中一个构件以独立运动规律即可;在各种实际机械中所用的轮系,往往既包含定轴轮系部分,又包含周转轮系部分,或者由几部分周转轮系组成,这种复杂的轮系称为复合轮系如图8—4所示,该复合轮系可分为左边的周转轮系和右边的定轴轮系两部分。
齿轮系传动比计算
齿 轮 系 传 动 比 计 算 1 齿轮系的分类 在复杂的现代机械中,为了满足各种不同的需要,常常采用一系列齿轮组成的传动系统。这种由一系列相互啮合的齿轮(蜗杆、蜗轮)组成的传动系统即齿轮系。下面主要讨论齿轮系的常见类型、不同类型齿轮系传动比的计算方法。 齿轮系可以分为两种基本类型:定轴齿轮系和行星齿轮系。 一、定轴齿轮系 在传动时所有齿轮的回转轴线固定不变齿轮系,称为定轴齿轮系。定轴齿轮系是最基本的齿轮系,应用很广。如下图所示。 二、行星齿轮系 若有一个或一个以上的齿轮除绕自身轴线自转外,其轴线又绕另一个轴线转动的轮系称为行星齿轮系,如下图所示。 1. 行星轮——轴线活动的齿轮. 2. 系杆 (行星架、转臂) H . 3. 中心轮 —与系杆同轴线、 与行星轮相啮合、轴线固定的齿轮 4. 主轴线 —系杆和中心轮所在轴线. 5. 基本构件—主轴线上直接承受 载荷的构件. 行星齿轮系中,既绕自身轴线自转又绕另一固定轴线(轴线O1)公转的齿轮2形象的称为行星轮。支承行星轮作自转并带动行星轮作公转的构件H 称为行星架。轴线固定的齿轮1、3则称为中心轮或太阳轮。因此行星齿轮系是由中心轮、行星架和行星轮三种基本构件组成。显然,行星齿轮系中行星架与两中心轮的几何轴线(O1-O3-OH )必须重合。否则无法运动。 根据结构复杂程度不同,行星齿轮系可分为以下三类: (1)单级行星齿轮系: 它是由一级行星齿轮传动机构构成的轮系。一个行星架及和其上的行星轮及与之啮合的中心轮组成。 (2)多级行星齿轮系:它是由两级或两级以上同类单级行星齿轮传动机构构成的轮系。 (3)组合行星齿轮系:它是由一级或多级以上行星齿轮系与定轴齿轮系组成的轮系。 行星齿轮系 根据自由度的不同。可分为两类: 1450rpm 53.7rpm
电子齿轮比计算公式
电子齿轮比计算公式: 已知编码器分辨率131072,脉冲频率200Khz要使转速达到3000r/min求电子齿轮比。 脉冲接口的最大频率是200KHZ,对应最大转速3000转每分,这样的设定能使定位模块发挥伺服的最高速。 代入以下公式: 马达转速(3000rpm)/60=脉冲频率(200000Hz)*(分子/分母)/伺服分辨率(131072) 约分下来电子齿轮分子4096,电子齿轮分母125。 这样的设置结果4000个脉冲转一圈,200Khz的频率对应3000RPM的转速。 将伺服马达编码器的分辨率设为分子,马达转一圈所需的脉冲数设为分母。 如果再装减速器的话,PLC原来所发脉冲数再乘以减比。 举个例子: 伺服马达编码器的分辨率131072,我设计为PLC每发一个脉冲伺服马达转0.5度,那么伺服马达转一圈(360。)需要720个脉冲。 电子齿轮就设为131072/720化简分数后为8192/45这样PLC 每次发720个脉冲伺服马达转一圈。 如果还想接个减速器,举个例子接个减比为5比1的减速器时,原来电子齿轮所设分数不变,PLC原来所发脉冲数再乘以5
(720*5=3600),即现在伺服马达转一圈PLC发3600个脉冲就可以了。 简单的说,比如说电子齿轮比是1(系统默认),脉冲当量是 1mm(就是物体在你发1个脉冲时运行的距离,注意是控制脉冲,就是你PLC发给伺服放大器的脉冲),当你把电子齿轮比改为2时,对应的脉冲当量就变成2mm。 可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。 伺服电机旋转时,速度表现重于精度表现时候,希望将电机速度性能完全表现出来;而对于旋转分辨率要求较低的时。 已知编码器分辨率131072脉冲频率200Khz要使转速达到3000r/min求电子齿轮比。 脉冲接口的最大频率是200KHZ,对应最大转速3000转每分,这样的设定能使定位模块发挥伺服的最高速。 代入以下公式: 马达转速(3000rpm)/60=脉冲频率(200000Hz)*(分子/分母)/伺服分辨率(131072) 约分下来电子齿轮分子4096,电子齿轮分母125 这样的设置结果4000个脉冲转一圈,200Khz的频率对应3000RPM的转速
齿轮传动计算题(带答案)
第四章齿轮传动计算题专项训练(答案);1、已知一标准直齿圆柱齿轮的齿数z=36,顶圆d;2、已知一标准直齿圆柱齿轮副,其传动比i=3,主;3、有一对标准直齿圆柱齿轮,m=2mm,α=20;4、某传动装置中有一对渐开线;5、已知一对正确安装的标准渐开线正常齿轮的ɑ=2;解:144=4/2(Z1+iZ1)Z1=18Z2;d 1=4*18=72d2=4*54=216 第四章齿轮传动计算题专项训练(答案) 1、已知一标准直齿圆柱齿轮的齿数z=36,顶圆da=304mm。试计算其分度圆直径d、根圆直径df、齿距p以及齿高h。 2、已知一标准直齿圆柱齿轮副,其传动比i=3,主动齿轮转速n1=750r/mi n,中心距a=240mm,模数m=5mm。试求从动轮转速n2,以及两齿轮齿数z1和z 2。 3、有一对标准直齿圆柱齿轮,m=2mm,α=200, Z1=25,Z2=50,求(1)如果n1=960r/min,n2=?(2)中心距a=?(3)齿距p=?答案: n2=480 a=7 5 p=6.28 4、某传动装置中有一对渐开线。标准直齿圆柱齿轮(正常齿),大齿轮已损坏,小齿轮的齿数z1=24,齿顶圆直径da1=78mm, 中心距a=135mm, 试计算大齿轮的主要几何尺寸及这对齿轮的传动比。解: 78=m(24+2) m=3 a=m/2(z1 +z2) 135=3/2(24+z2) z2 =66 da2=3*66+2*3=204 df2=3*66-2*1.25*3=190.5 i =66/24=2.75 5、已知一对正确安装的标准渐开线正常齿轮的ɑ=200,m=4mm,传动比i12 =3,中心距a=144mm。试求两齿轮的齿数、分度圆半径、齿顶圆半径、齿根圆半径。
ADAMS分析实例-定轴轮系和行星轮系传动模拟经典超值
ADAMS 分析实例-定轴轮系和行星轮系传动模拟 有一对外啮合渐开线直齿圆柱体齿轮传动.已知 20,4,25,5021====αmm m z z ,两个齿轮的 厚度都是50mm 。 ⒈ 启动ADAMS 双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。在欢迎对话框中选择“Create a new model ”, 在模型名称(Model name )栏中输入:dingzhouluenxi ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。如图1-1所示。 图1-1 欢迎对话框 ⒉ 设置工作环境 2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。然后点击“OK ”确定。如图2-1所表示。 2.2 用鼠标左键点击选择(Select )图标,控制面板出现在工 具箱中。 2.3 用鼠标左键点击动态放大(Dynamic Zoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。 ⒊创建齿轮 3.1 在ADAMS/View 零件库中选择圆柱体 (Cylinder )图标 ,参数选择为“New Part ”,长度(Length )选择50mm (齿轮的厚度),半径(Radius )选择100mm (1002 5042z m 1=?=?) 。如图3-1所示。 图 2-1 设置工作网格对话框 图3-1设置圆柱体选项
行星齿轮传动比计算
行星齿轮传动比计算 在《机械原理》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错,其实用不着如此,只要理解了传动比e ab i 的含义,就可以很快地直接写出行星齿轮的传动比,其关键是掌握几个根据e ab i =ab i (E 是指固定件,即是固定的太阳轮,A 为主动件,B 为被动件)说明:H ab i =(Na-NH)/(Nb-NH),那么如果H 一开始是E ,那么e ab i =(Na-NE)/(Nb-NE)=Na/Nb=ab i NE 的转速为0........由于的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。 一式求解行星齿轮传动比有三个基本的公式 1=+c ba a bc i i ――――――――――――――――――――――――1 a cx a bx a bc i i i = ―――――――――――――――――――――――――2 a c b a b c i i 1= ――――――――――――――――――――――――――3 熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等
在此例中,要求出e ab i =?,如果行星架固定不动的话,这道题目就简单多了,就是一定轴传动。所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bc i i i =将x 加进去, 所以可以得出:e bx e ax e ab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第 一个公式1=+c ba a bc i i 了,所以)1()1(x be x ae e bx e ax e ab i i i i i --==所以现在e ab i 就变成了两个定轴传动之间的关系式了。定轴传动的传动比就好办了,直接写出来就可以了。 即)1()1())1(1())1(1()1()1(01 c e b d a e c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ?-+=?--?--=--== 再例如下面的传动机构: 已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。其输入件对输出件1的传动比i H1
电子齿轮比
1、什么是机械减速比(m/n) 答:机械减速比的定义是减速器输入转速与输出转速的比值,也等于从动轮齿数与主动轮齿数的比值。在数控机床上为电机轴转速与丝杠转速之比。 2、什么是电子齿轮比 答:电子齿轮比就是对伺服接受到上位机的脉冲频率进行放大或者缩小,其中一个参数为分子,一个为分母。如分子大于分母就是放大,如分子小于分母就是缩小。例如:上位机输入频率100HZ,电子齿轮比分子设为1,分母设为2,那么伺服实际运行速度按照50HZ的脉冲来进行。上位机输入频率100HZ,电子齿轮比分子设为2,分母设为1,那么伺服实际运行速度按照200HZ的脉冲来进行 3、怎样计算电子齿轮比(B/A) 明白几个概念: 编码器分辨率(F):伺服电机轴旋转一圈所需脉冲数。看伺服电机的铭牌,在对驱动器说明书既可确定编码器的分辨率。 每转脉冲数(f):丝杠转动一圈所需脉冲数。 脉冲当量(p):数控系统(上位机)发出一个脉冲时,丝杠移动的直线距离或旋转轴转动的度数,也是数控系统所能控制的最小距离。这个值越小,经各种补偿后越容易到更高的加工精度和表面质量。脉冲当量的设定值决定机床的最大进给速度,当进给速度速度满足要求的情况下,可以设定较小的脉冲当量。 螺距(d):螺纹上相邻两牙对应点之间的轴向距离。 电子齿轮比计算公式如下: 4、步进电机脉冲当量和细分数的关系 在实际调整时可先确定脉冲当量,在根据关系式计算细分数。或先确定细分数,在计算脉冲当量。 其中:x表示步进驱动器细分数,θ表示步进电机步距角。 5、关于旋转轴 与直线运动轴相比区别在于:旋转轴的螺距值为360,其它计算相同,只需将螺距值换为360。
齿轮传动自测题-答案
1. 一对渐开线齿廓啮合时,啮合点处两者的压力角,而在节点啮合时则。 1) A.一定相等 B.一定不相等 C.一般不相等 2) A.一定相等 B.一定不相等 C.一般不相等 2. 齿轮的渐开线形状取决于它的直径。 A. 齿顶圆 B.分度圆 C. 基圆 D. 齿根圆 3. 渐开线直齿圆柱标准齿轮是指_____________________的齿轮。 A. 分度圆上模数和压力角为标准值; B. 节圆等于分度圆; C. 分度圆上齿厚等于齿槽宽,而且模数、压力角以及齿顶高与模数之比、齿根高与模数之比均为标准值。 4. 一对渐开线齿轮啮合传动时,两齿廓间_______。 A. 保持纯滚动 B.各处均有相对滑动 C.除节点外各处均有相对滑动 5.一对渐开线斜齿圆柱齿轮在啮合传动过程中,一对齿廓上的接触线长度是变化的。 A.由小到大逐渐 B. 由大到小逐渐 C.由小到大再到小逐渐 D. 始终保持定值 6. 一对相互啮合的渐开线减速齿轮传动,小齿轮齿面硬度>350HBS,大齿轮齿面硬度<350HBS,在传递动力时_______。 A. 小齿轮齿面最大接触应力较大 B.两齿轮齿面最大接触应力相等 C.大齿轮齿面最大接触应力较大 D.与齿数、材料有关,不一定哪个大 7. 一级齿轮传动,其传动比 i>1,传动效率为h,已知从动轮输出转矩为T2,则主动轮上的转矩T1的计算公式是___________。 A. B. C. D. 8. 同精度的齿轮传动,动载系数Kv与__________有关。 A. 圆周速度 B.大齿轮在轴上相对于轴承的位置 C. 传动超载 D.原动机及工作机器的性能和工作情况 9. 对普通齿轮传动(精度为7、8、9级)轮齿弯曲强度公式是按载荷作用在______为出发点推导出来的。 A.齿根 B.齿顶 C.分度圆附近 D.齿根圆角30°切线与轮齿中心线交点 10. 一对圆柱齿轮,在确定大小齿轮的宽度时,通常把小齿轮的齿宽做得比大齿轮的宽一些,其目的是 A. 为了使小齿轮的弯曲强度比大齿轮的高一些 B.为了便于安装,保证接触线长度 C.为了使传动平稳,提高效率 D.为了使小齿轮每个齿啮合次数比大齿轮多 11. A、B两对齿轮传动,齿面硬度和齿宽相同,A对齿轮对称布置,B对齿轮悬臂布置,它们的齿向载荷分布(不均)系数的关系是__________。 A. B. C. D. 12. 已知:A对齿轮:z1=40,z2=60,m=2mm,b=60mm;B对齿轮:z1=20,z2=30,m=4mm,b=60mm。当A、B两对齿轮的工作条件、材料、许用应力均相同,则两对齿轮的__________。 A. 接触强度和弯曲强度均相同 B.接触强度和弯曲强度均不相同 C.接触强度相同,而弯曲强度不相同 D.接触强度不相同而弯曲强度相同 13. 斜齿轮传动的动载荷与同样的直齿轮传动的动载荷相比:____________。 A. 相等 B.较小 C.较大 D.视实际运转条件,可以大也可以小 14. 闭式齿轮传动,油浴润滑的油量主要取决于________。 A..齿轮直径 B.齿轮宽度 C.模数 D.传动的功率大小 E.圆周速度 15对于开式齿轮传动,在工程设计中,一般__。 A、按接触强度设计齿轮尺寸,再校核弯曲强度