gearman开源任务调度系统
gearman分布式任务调度系统
方少森@百度
一、总体介绍
gearman是一个分布式任务分发调度框架,支持多语言、并发的任务执行,支持负载均衡。gearman具有如下特点:
1、开源
2、支持多语言接口:php、perl、python、C 等;
3、灵活:不必拘泥与特定的模式,可以灵活使用分布式框架,如map/reduce;
4、速度快,开销小
5、可嵌入,很轻
6、无单点。
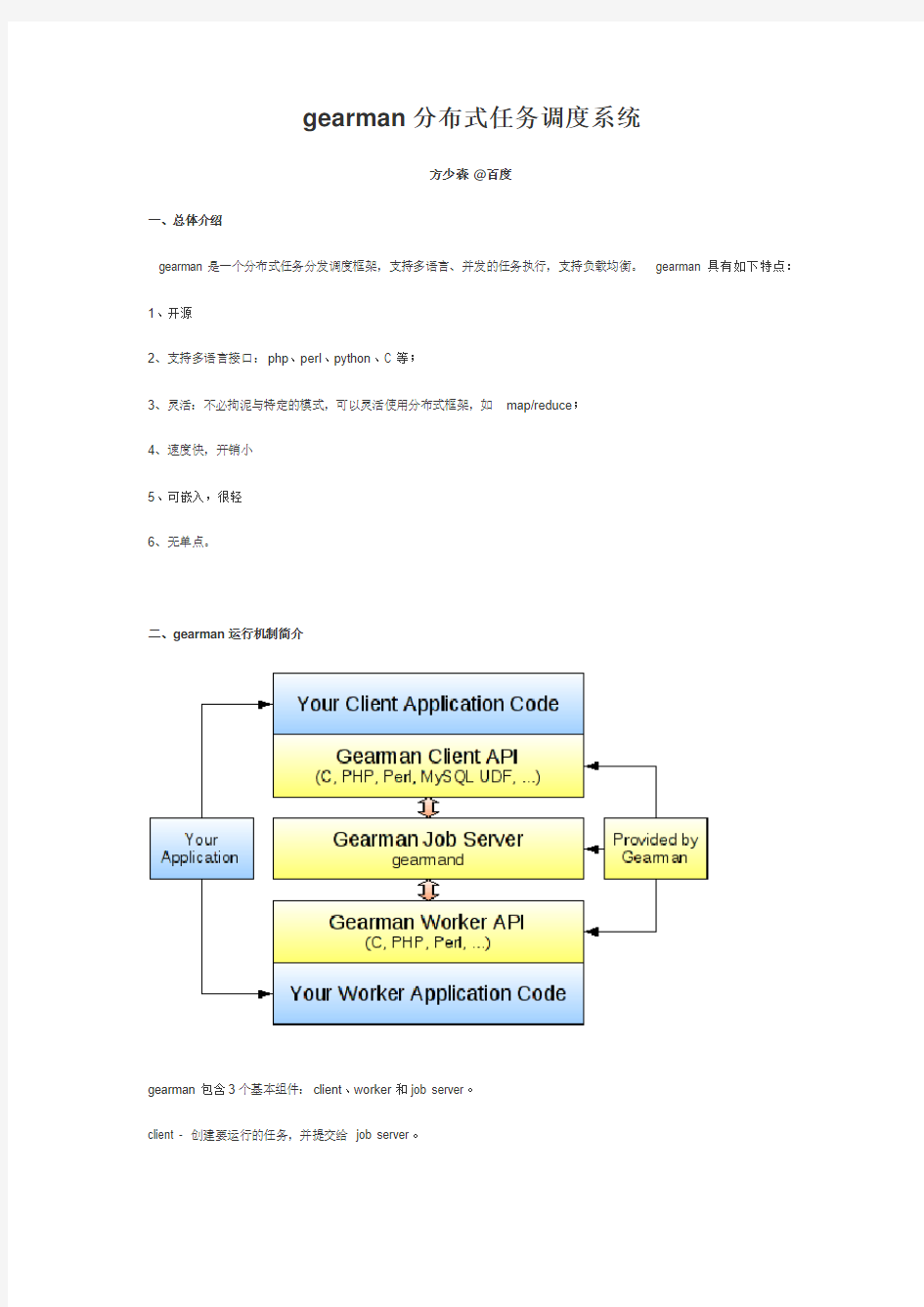
二、gearman运行机制简介
gearman包含3个基本组件:client、worker和job server。
client - 创建要运行的任务,并提交给job server。
job-server - 寻找最合适的worker,并提交任务给worker。
worker - 接收job server的任务,执行并返回结果,结果通过job server返回给client。从图中可以看出,client和worker均为gearman提供的api。
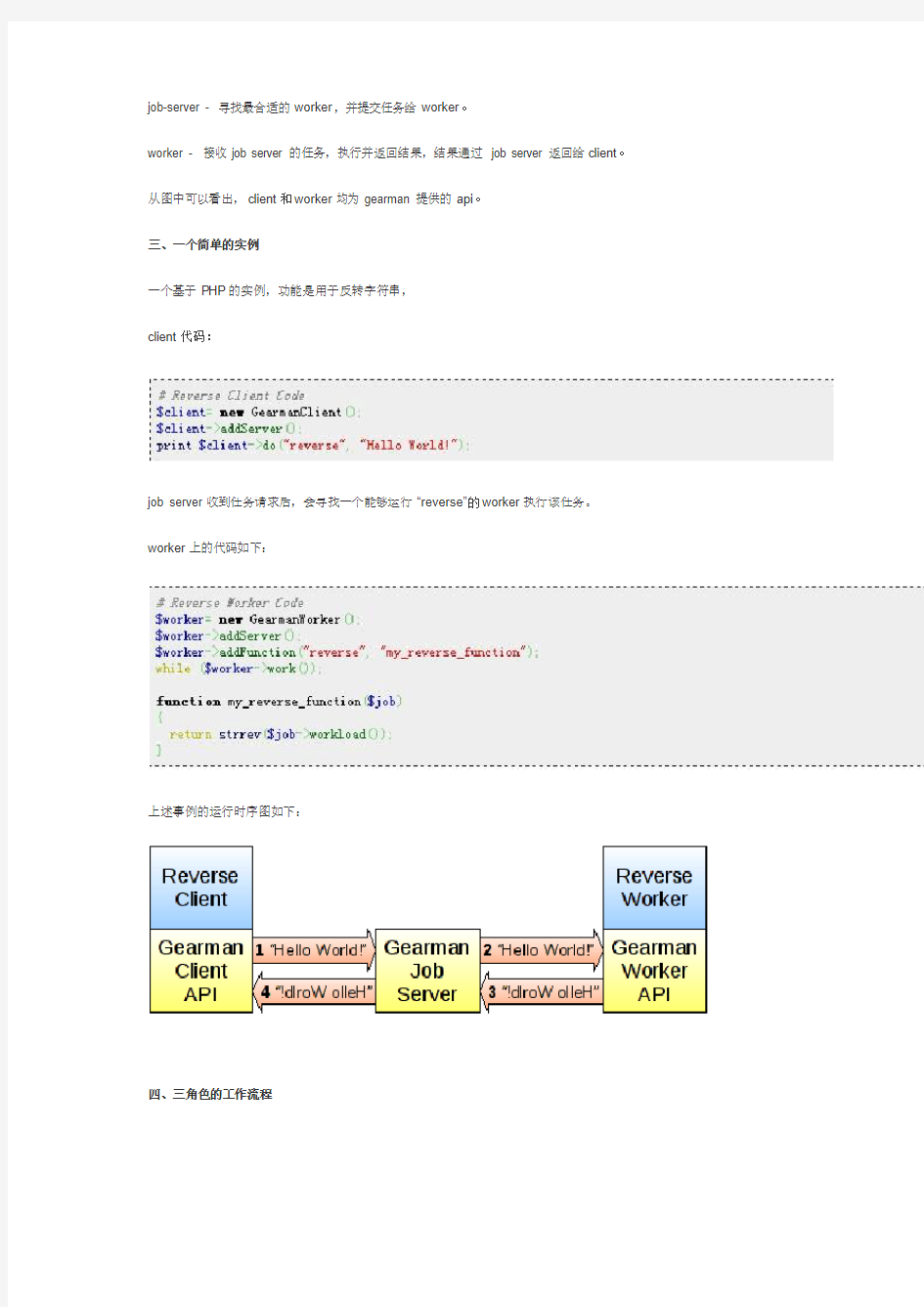
三、一个简单的实例
一个基于P HP的实例,功能是用于反转字符串,
client代码:
job server收到任务请求后,会寻找一个能够运行“reverse”的worker执行该任务。worker上的代码如下:
上述事例的运行时序图如下:
四、三角色的工作流程
一次正常的Gearman任务执行流程如上图所示:
1. worker向Gearman Server注册自身可以执行的功能
2. worker尝试获取一个任务
3. server通告worker暂无任务
4. worker通告server:“我先睡会,有活干时再叫醒我”
5. client向server发起任务请求
6. server唤醒可以完成这项工作的worker(可能会唤醒多个woker)
7. worker向server发起“饥饿”请求,尝试获得一个任务
8. server选定一个worker,将该任务分配下去
9. 通告client:“我安排别人处理你的请求了,耐心等待吧”
10. worker辛苦工作一段时间后,向server通告“干完了”
11. server将结果反馈给用户
说明:
1. 任务分类:
按优先级分:普通(SUBMIT_JOB),高(SUBMIT_JOB_HIGH),低(SUBMIT_JOB_LOW)
?按执行方式分:普通(_JOB_HIGH,_JOB_LOW),后台(_JOB_HIGH_BG,_JOB_LOW_BG)——最大区别在于,client可以跟踪前台任务的工作状态,而不能跟踪BG任务
2. 任务工作状态的通告(worker-->server-->client):
?WORK_DATA:
?WORK_WARNING
?WORK_STATUS
对于长任务,worker应该每隔一段时间通告任务状态
?WORK_COMP LETE
?WORK_FAIL
?WORK_E XCEPTION
3. Server监控
Gearman有“Administrative P rotocol”专门用于对Gearman Server的监控,主要涉及以下几方面:
status:所注册职能分类,worker总数目,处于工作状态的worker数目,可用worker数目等
w orker的详细信息:所注册功能、IP
server的缓存任务最大队列长度:可以被查询也可以被设定
五、通信协议
1、二进制packet格式
所有请求和返回均为二进制数据包,包含header和可选的数据。header包含如下字段:
4 byte magic code - This is either "\0REQ" for requests or "\0RES" for responses.
4 byte type - A big-endian (network-order) integer containing
an enumerated packet type. Possible values are:
# Name Magic Type
1 CAN_DO REQ Worker
2 CANT_DO REQ Worker
3 RESET_ABILITIES REQ Worker
4 PRE_SLEEP REQ Worker
5 (unused) - -
6 NOOP RES Worker
7 SUBMIT_JOB REQ Client
8 JOB_CREATED RES Client
9 GRAB_JOB REQ Worker
10 NO_JOB RES Worker
11 JOB_ASSIGN RES Worker
12 WORK_STATUS REQ Worker
RES Client
13 WORK_COMPLETE REQ Worker
RES Client
14 WORK_FAIL REQ Worker
RES Client
15 GET_STATUS REQ Client
16 ECHO_REQ REQ Client/Worker
17 ECHO_RES RES Client/Worker
18 SUBMIT_JOB_BG REQ Client
19 ERROR RES Client/Worker
20 STATUS_RES RES Client
21 SUBMIT_JOB_HIGH REQ Client
22 SET_CLIENT_ID REQ Worker
23 CAN_DO_TIMEOUT REQ Worker
24 ALL_YOURS REQ Worker
25 WORK_EXCEPTION REQ Worker
RES Client
26 OPTION_REQ REQ Client/Worker
27 OPTION_RES RES Client/Worker
28 WORK_DATA REQ Worker
RES Client
29 WORK_WARNING REQ Worker
RES Client
30 GRAB_JOB_UNIQ REQ Worker
31 JOB_ASSIGN_UNIQ RES Worker
32 SUBMIT_JOB_HIGH_BG REQ Client
33 SUBMIT_JOB_LOW REQ Client
34 SUBMIT_JOB_LOW_BG REQ Client
35 SUBMIT_JOB_SCHED REQ Client
36 SUBMIT_JOB_EPOCH REQ Client
4 byte size - A big-endian (network-order) integer containing
the size of the data being sent after the header.
data域中的参数之间通过一个字节的NULL分割,最后一个参数的界定范围为NULL分隔符之后到data域总长度之间的数据。参数的长度不能超过64字节(包括NULL分隔符)。
client/w orker 与job server交互packet格式如下:
Client/Worker Requests
----------------------
These request types may be sent by either a client or a worker:
ECHO_REQ
When a job server receives this request, it simply generates a
ECHO_RES packet with the data. This is primarily used for testing
or debugging.
Arguments:
- Opaque data that is echoed back in response.
Client/Worker Responses
-----------------------
These response types may be sent to either a client or a worker:
ECHO_RES
This is sent in response to a ECHO_REQ request. The server doesn't look at or modify the data argument, it just sends it back.
Arguments:
- Opaque data that is echoed back in response.
ERROR
This is sent whenever the server encounters an error and needs
to notify a client or worker.
Arguments:
- NULL byte terminated error code string.
- Error text.
Client Requests
---------------
These request types may only be sent by a client:
SUBMIT_JOB, SUBMIT_JOB_BG,
SUBMIT_JOB_HIGH, SUBMIT_JOB_HIGH_BG,
SUBMIT_JOB_LOW, SUBMIT_JOB_LOW_BG
A client issues one of these when a job needs to be run. The
server will then assign a job handle and respond with a JOB_CREATED packet.
If on of the BG versions is used, the client is not updated with
status or notified when the job has completed (it is detached).
The Gearman job server queue is implemented with three levels:
normal, high, and low. Jobs submitted with one of the HIGH versions always take precedence, and jobs submitted with the normal versions take precedence over the LOW versions.
Arguments:
- NULL byte terminated function name.
- NULL byte terminated unique ID.
- Opaque data that is given to the function as an argument.
SUBMIT_JOB_SCHED
Just like SUBMIT_JOB_BG, but run job at given time instead of
immediately. This is not currently used and may be removed.
Arguments:
- NULL byte terminated function name.
- NULL byte terminated unique ID.
- NULL byte terminated minute (0-59).
- NULL byte terminated hour (0-23).
- NULL byte terminated day of month (1-31).
- NULL byte terminated month (1-12).
- NULL byte terminated day of week (0-6, 0 = Monday).
- Opaque data that is given to the function as an argument.
SUBMIT_JOB_EPOCH
Just like SUBMIT_JOB_BG, but run job at given time instead of
immediately. This is not currently used and may be removed.
Arguments:
- NULL byte terminated function name.
- NULL byte terminated unique ID.
- NULL byte terminated epoch time.
- Opaque data that is given to the function as an argument.
GET_STATUS
A client issues this to get status information for a submitted job.
Arguments:
- Job handle that was given in JOB_CREATED packet.
OPTION_REQ
A client issues this to set an option for the connection in the
job server. Returns a OPTION_RES packet on success, or an ERROR packet on failure.
Arguments:
- Name of the option to set. Possibilities are:
* "exceptions" - Forward WORK_EXCEPTION packets to the client.
Client Responses
----------------
These response types may only be sent to a client:
JOB_CREATED
This is sent in response to one of the SUBMIT_JOB* packets. It
signifies to the client that a the server successfully received
the job and queued it to be run by a worker.
Arguments:
- Job handle assigned by server.
WORK_DATA, WORK_WARNING, WORK_STATUS, WORK_COMPLETE, WORK_FAIL, WORK_EXCEPTION
For non-background jobs, the server forwards these packets from
the worker to clients. See "Worker Requests" for more information and arguments.
STATUS_RES
This is sent in response to a GET_STATUS request. This is used by
clients that have submitted a job with SUBMIT_JOB_BG to see if the job has been completed, and if not, to get the percentage complete.
Arguments:
- NULL byte terminated job handle.
- NULL byte terminated known status, this is 0 (false) or 1 (true).
- NULL byte terminated running status, this is 0 (false) or 1
(true).
- NULL byte terminated percent complete numerator.
- Percent complete denominator.
OPTION_RES
Successful response to the OPTION_REQ request.
Arguments:
- Name of the option that was set, see OPTION_REQ for possibilities.
Worker Requests
---------------
These request types may only be sent by a worker:
CAN_DO
This is sent to notify the server that the worker is able to
perform the given function. The worker is then put on a list to be
woken up whenever the job server receives a job for that function.
Arguments:
- Function name.
CAN_DO_TIMEOUT
Same as CAN_DO, but with a timeout value on how long the job
is allowed to run. After the timeout value, the job server will
mark the job as failed and notify any listening clients.
Arguments:
- NULL byte terminated Function name.
- Timeout value.
CANT_DO
This is sent to notify the server that the worker is no longer
able to perform the given function.
Arguments:
- Function name.
RESET_ABILITIES
This is sent to notify the server that the worker is no longer
able to do any functions it previously registered with CAN_DO or
CAN_DO_TIMEOUT.
Arguments:
- None.
PRE_SLEEP
This is sent to notify the server that the worker is about to
sleep, and that it should be woken up with a NOOP packet if a
job comes in for a function the worker is able to perform.
Arguments:
- None.
GRAB_JOB
This is sent to the server to request any available jobs on the
queue. The server will respond with either NO_JOB or JOB_ASSIGN, depending on whether a job is available.
Arguments:
- None.
GRAB_JOB_UNIQ
Just like GRAB_JOB, but return JOB_ASSIGN_UNIQ when there is a job.
Arguments:
- None.
WORK_DATA
This is sent to update the client with data from a running job. A
worker should use this when it needs to send updates, send partial
results, or flush data during long running jobs. It can also be
used to break up a result so the worker does not need to buffer the entire result before sending in a WORK_COMPLETE packet.
Arguments:
- NULL byte terminated job handle.
- Opaque data that is returned to the client.
WORK_WARNING
This is sent to update the client with a warning. It acts just
like a WORK_DATA response, but should be treated as a warning instead of normal response data.
Arguments:
- NULL byte terminated job handle.
- Opaque data that is returned to the client.
WORK_STATUS
This is sent to update the server (and any listening clients)
of the status of a running job. The worker should send these
periodically for long running jobs to update the percentage
complete. The job server should store this information so a client who issued a background command may retrieve it later with a GET_STATUS request.
Arguments:
- NULL byte terminated job handle.
- NULL byte terminated percent complete numerator.
- Percent complete denominator.
WORK_COMPLETE
This is to notify the server (and any listening clients) that
the job completed successfully.
Arguments:
- NULL byte terminated job handle.
- Opaque data that is returned to the client as a response.
WORK_FAIL
This is to notify the server (and any listening clients) that
the job failed.
Arguments:
- Job handle.
WORK_EXCEPTION
This is to notify the server (and any listening clients) that
the job failed with the given exception.
Arguments:
- NULL byte terminated job handle.
- Opaque data that is returned to the client as an exception.
SET_CLIENT_ID
This sets the worker ID in a job server so monitoring and reporting commands can uniquely identify the various workers, and different connections to job servers from the same worker.
Arguments:
- Unique string to identify the worker instance.
ALL_YOURS
Not yet implemented. This looks like it is used to notify a job
server that this is the only job server it is connected to, so
a jo
b can be given directly to this worker with a JOB_ASSIGN and
no worker wake-up is required.
Arguments:
- None.
Worker Responses
----------------
These response types may only be sent to a worker:
NOOP
This is used to wake up a sleeping worker so that it may grab a
pending job.
Arguments:
- None.
NO_JOB
This is given in response to a GRAB_JOB request to notify the
worker there are no pending jobs that need to run.
Arguments:
- None.
JOB_ASSIGN
This is given in response to a GRAB_JOB request to give the worker
information needed to run the job. All communication about the
job (such as status updates and completion response) should use
the handle, and the worker should run the given function with
the argument.
Arguments:
- NULL byte terminated job handle.
- NULL byte terminated function name.
- Opaque data that is given to the function as an argument.
JOB_ASSIGN_UNIQ
This is given in response to a GRAB_JOB_UNIQ request and acts
just like JOB_ASSIGN but with the client assigned unique ID.
Arguments:
- NULL byte terminated job handle.
- NULL byte terminated function name.
- NULL byte terminated unique ID.
- Opaque data that is given to the function as an argument.
2、管理协议
job server支持文本的命令,用于获取信息和执行管理任务。文本命令与二进制命令使用相同的端口,二者之间通过命令的第一个字节进行区分:若第一个字节为NULL,则为二进制命令,非NULL则为文本命令。
管理命令如下:
workers
This sends back a list of all workers, their file descriptors,
their IP s, their IDs, and a list of registered functions they can
perform. The list is terminated w ith a line containing a single
'.' (period). The format is:
FD IP-ADDRESS CLIENT-ID : FUNCTION ...
Arguments:
- None.
status
This sends back a list of all registered functions. Next to
each function i s the number of jobs in the queue, the number of
running jobs, and the number of capable workers. The columns are tab separated, and the list is terminated w ith a line containing
a single '.' (period). The format is:
FUNCTION\tTOTAL\tRUNNING\tAVAILABLE_WORKERS
Arguments:
- None.
maxqueue
This sets the maximum queue size for a function. If no size is
given, the default is used. If the size is negative, then the queue is set to be unlimited. This sends back a single line w ith "OK".
Arguments:
- Function name.
- Optional maximum queue size.
shutdown
Shutdow n the server. If the optional "graceful" argument is used, close the listening socket and let all existing connections
complete.
Arguments:
- Optional "graceful" mode.
version
Send back the version of the server.
Arguments:
- None.
六、上面的reverse实例socket交互分析
Worker registration:
Worker -> Job Server
00 52 45 51 \0REQ (Magic)
00 00 00 01 1 (Packet type: CAN_DO)
00 00 00 07 7 (Packet length)
72 65 76 65 72 73 65 reverse (Function)
Worker check for job:
Worker -> Job Server
00 52 45 51 \0REQ (Magic)
00 00 00 09 9 (Packet type: GRAB_JOB) 00 00 00 00 0 (Packet length)
Job Server -> Worker
00 52 45 53 \0RES (Magic)
00 00 00 0a 10 (Packet type: NO_JOB)
00 00 00 00 0 (Packet length)
Worker -> Job Server
00 52 45 51 \0REQ (Magic)
00 00 00 04 4 (Packet type: PRE_SLEEP) 00 00 00 00 0 (Packet length)
Client job submission:
Client -> Job Server
00 52 45 51 \0REQ (Magic)
00 00 00 07 7 (Packet type: SUBMIT_JOB) 00 00 00 0d 13 (Packet length)
72 65 76 65 72 73 65 00 reverse\0 (Function)
00 \0 (Unique ID)
74 65 73 74 test (Workload)
Job Server -> Client
00 52 45 53 \0RES (Magic)
00 00 00 08 8 (Packet type: JOB_CREATED) 00 00 00 07 7 (Packet length)
48 3a 6c 61 70 3a 31 H:lap:1 (Job handle)
Worker wakeup:
Job Server -> Worker
00 52 45 53 \0RES (Magic)
00 00 00 06 6 (Packet type: NOOP)
00 00 00 00 0 (Packet length)
Worker check for job:
Worker -> Job Server
00 52 45 51 \0REQ (Magic)
00 00 00 09 9 (Packet type: GRAB_JOB)
00 00 00 00 0 (Packet length)
Job Server -> Worker
00 52 45 53 \0RES (Magic)
00 00 00 0b 11 (Packet type: JOB_ASSIGN)
00 00 00 14 20 (Packet length)
48 3a 6c 61 70 3a 31 00 H:lap:1\0 (Job handle)
72 65 76 65 72 73 65 00 reverse\0 (Function)
74 65 73 74 test (Workload)
Worker response for job:
Worker -> Job Server
00 52 45 51 \0REQ (Magic)
00 00 00 0d 13 (Packet type: WORK_COMPLETE) 00 00 00 0c 12 (Packet length)
48 3a 6c 61 70 3a 31 00 H:lap:1\0 (Job handle)
74 73 65 74 tset (Response)
Job server response to client:
Job Server -> Client
00 52 45 53 \0RES (Magic)
00 00 00 0d 13 (Packet type: WORK_COMPLETE) 00 00 00 0c 12 (Packet length)
48 3a 6c 61 70 3a 31 00 H:lap:1\0 (Job handle)
74 73 65 74 tset (Response)
物流车辆智能调度管理系统概要
2009机电工程技术年第38卷第08 期 物流车辆智能调度管理系统 赖顺桥,肖熠琳 (广州市光机电技术研究院广东省现代控制与光机电技术公共实验室, 广东广州 510663 收稿日期:2009-04-15 ,探讨了系统的工作原理,,更好地满足企业JIT (Just In Time ;工厂智能系统文献标识码:B 文章编号:1009-9492(200908-0019-03 1引言 现代物流不仅要考虑从生产者到消费者的货物配送问题,还要考虑从供应商到生产者对原材料的采购,以及生产者本身在产品制造过程中的运输、保管和信息等各个方面,从而全面地、综合性地提高经济效益和效率。中国加入WTO 后,经济发展正面临着全球经济大融合的严峻考验,在激烈的竞争环境下,各企业纷纷实行供应商管理库存(VMI 、JIT (Just in time 即时采购等先进的供应链管理,在生产方式上纷
纷采用先进的生产管理方式——准时生产方式(JIT 生产。这些先进管理方式的主要目的都是为企业能够实现“零库存”。然而,绝大部分的企业和工厂都忽视了一个重要环节——材料装卸货环节(当材料从供应商出厂送到企业生产线上,必须经过装卸货,仍旧采用人工调度呼叫的管理方式。人工调度的方式大致如下: (1运货车辆到调度室用登记表登记; (2调度员通过对讲机询问在卸货区的工作人员是否可以调度该车辆进入卸货区,如果不可以,则叫该车到“待车区”等工作人员通知; (3得到卸货许可后,调 度员要去“待车区”寻找该车辆进入卸货区卸货。这种方式存在着出错概率大、效率低、易出现堵车、用工成本高等缺陷。 本文介绍一套满足现代化生产需求的物流车辆智能调度管理系统,彻底解决人工调度方式存在的种种不足,实现货车全自动、智能调度呼叫的管理方式,大大提高货场车位的使用周转速度,减轻了人的劳动强度,提高了卸货效率,确保工厂外围送货车辆顺畅有序运作,从而大大地 提高当前工厂物流的效率,对企业的增产和增收起着积极的作用。 2系统组成与工作原理 2.1系统组成 系统组成如图1所示。硬件系统主要包括计算机系统、传感器及信号采集系统、通讯系统、LED 显示系统、语音广播系统、电源系统等;软件系统主要包括数据采集模块、无线通讯模块、数据库模块、调度算法模块、指挥室车辆登记模块、参数设置模块、查询统计模块、打印模块、LED 显示模块、语音播放模块、待车超时提示模块、卸货超时报警模块及上位机界面设计模块等。 2.2工作原理
任务调度中心系统-概要设计
任务调度中心系统
目录 一、设计目的 (3) 二、整体架构 (4) 2.1 核心功能 (5) 2.2 核心组件 (5) 三、Job元数据 (5) 四、JobClient (5) 五、JobManager (Master) (6) 5.1 RPCServer (6)
5.2 数据库管理服务类 (6) 5.3 资源管理服务 (7) 5.4 Job依赖关系维护 (8) 5.5 定时调度器 (8) 5.6 Job监控 (8) 5.7 告警服务 (8) 5.8 初始化流程 (9) 5.9 启动流程 (9) 5.10 成功Job处理流程 (9) 5.11 失败Job处理流程 (9) 六、JobWorker (Slave) (9) 6.1 内存数据结构 (9) 6.2 定期从获取可以运行的Job (10) 6.3 执行Job (10) 七、核心流程图 (10) 7.1 Job维护流程 (10) 7.2 Job依赖维护流程 (11) 7.3 资源维护流程 (12) 7.4 Job提交流程 (13) 7.5 Job执行流程 (15) 7.6 Job监控流程 (15) 八、后台部署与运行 (17) 8.1 安装 (17) 8.2 数据库建库建表 (17) 8.3 配置 (17) 8.4 运行 (18) 8.5 停止 (18) 九、部署与运行 (18) 9.1 安装 (18) 9.2 配置 (18) 9.3 运行 (19)
一、设计目的 ●目前整个市场任务调度非常粗糙,基本仅靠Crontab来定时运行,日 志清洗、日志校验、数据分析、入库各模块之间无有效依赖,经常 由于前置任务出错或者未完成,后续的任务运行出错,并且对任务 出错的监控不到位,造成分析数据不能及时入库,导致线上BUG。 ●真实业务场景下合理的任务运行图: (图一) 1.定时触发一个日志校验的Job,去检查清洗后的日志是否已经就 绪; 2.分析的JOB均依赖日志校验的Job,一旦日志校验的Job执行成 功,则并发启动依赖其的分析Job1-4; 3.入库JOB1依赖分析JOB1和分析JOB2,如果这两个分析JOB全 部执行成功,则启动执行入库JOB1; 4.对于入库JOB2,如果分析JOB3和分析JOB4有一个未成功执行, 则入库JOB2就不执行; ●一个复杂的任务依赖图:
基于北斗的车辆监控调度系统项目解决方案V10
基于北斗的车辆监控调度系统 解决方案 北京国翼恒达导航科技有限公司
目录 1系统概述 (1) 2系统建设目标 (1) 3系统总体设计 (2) 3.1 系统总体结构 (2) 3.2 系统组成 (3) 4车辆监控管理平台分系统设计 (3) 4.1 车辆实时监控管理软件 (3) 4.1.1 地图服务 (3) 4.1.2 车辆位置监控 (4) 4.1.3 车辆轨迹回放 (4) 4.1.4 车辆状态监控 (5) 4.1.5 车辆报警管理 (5) 4.1.6 车辆指挥调度 (6) 4.1.7 车辆统计分析 (6) 4.1.8 系统管理 (7) 4.2 北斗指挥机 (7) 5智能车载终端分系统设计 (7) 5.1 北斗RDSS车载终端 (8) 5.1.1 产品功能 (8) 5.1.2 产品技术指标 (8) 5.1.3 产品结构特征 (10) 5.2 导航仪 (11) 5.2.1 产品性能指标 (11) 5.2.2 产品结构特征 (12) 5.3 嵌入式软件 (13) 6 系统预算 (14)
1系统概述 在不同行业领域的应用中,车辆不再简单充当运输载体,车辆管理部门往往把车辆作为一个信息点对其进行数据采集跟踪指挥布控。在现阶段,车辆监控普遍采用GPS(全球定位系统)与其他通信系统相结合的方式,实现对车辆监控的要求。但是采用这种车辆监控方式也存在着诸多的弊端,如在移动基站信号覆盖弱的地方,通信成功率低、车队之间无法远距离通信、上级管理部门无法指挥调度等问题,都将影响监控系统的稳定可靠性。北斗卫星导航系统是我国自行研制开发的全球卫星定位与通信系统,随着我北斗二代系统投入使用,北斗系统运用于各特种车辆及重点车辆监控,是必然的发展趋势。 基于北斗的车辆监控调度系统将北斗卫星导航定位技术、GIS地理信息系统技术、互联网技术有机结合,针对不同类型车辆如危化品运输车、客运车、政府部门车辆及各种特种车辆如警用车、运钞车、消防车,救护车、邮政车、工程抢险车等,可提供系统监控中心的整体解决方案。监控中心通过北斗卫星网络,能够实现全天候网络无缝覆盖获取车辆的地理位置、运行方向、运行速度及各种状态信息,对车辆进行实时监控、调度、发布服务信息、受理各种类型的报警信息等。本系统扩展性强,配置灵活方便,规模可大可小,监控中心可适应小到几辆车,大到数万辆车的监控和管理。 2系统建设目标 基于北斗的车辆监控调度系统以北斗卫星导航系统作为车辆定位和监控调度及监控中心与车辆间通信的支持平台。本系统能够在广阔疆域全天候、无缝隙、
Java开源搜索引擎分类列表
Java开源搜索引擎分类列表 Nutch 是一个开源Java 实现的搜索引擎。它提供了我们运行自己的搜索引擎所需的全部工具。包括全文搜索和Web爬虫。 Solr是一个高性能,采用Java5开发,基于Lucene的全文搜索服务器。文档通过Http利用XML加到一个搜索集合中。查询该集合也是通过http收到一个XML/JSON响应来实现。它的主要特性包括:高效、灵活的缓存功能,垂直搜索功能,高亮显示搜索结果,通过索引复制来提高可用性,提供一套强大Data Schema来定义字段,类型和设置文本分析,提供基于Web的管理界面等。 Egothor是一个用Java编写的开源而高效的全文本搜索引擎。借助Java的跨平台特性,Egothor能应用于任何环境的应用,既可配置为单独的搜索引擎,又能用于你的应用作为全文检索之用。 更多Egothor信息 Nutch Nutch 是一个开源Java 实现的搜索引擎。它提供了我们运行自己的搜索引擎所需的全部工具。包括全文搜索和Web爬虫。 更多Nutch信息 Lucene Apache Lucene是一个基于Java全文搜索引擎,利用它可以轻易地为Java软件加入全文搜寻功能。Lucene的最主要工作是替文件的每一个字作索引,索引让搜寻的效率比传统的逐字比较大大提高,Lucen提供一组解读,过滤,分析文件,编排和使用索引的API,它的强大之处除了高效和简单外,是最重要的是使使用者可以随时应自已需要自订其功能。 更多Lucene信息 Oxyus 是一个纯java写的web搜索引擎。 更多Oxyus信息 BDDBot BDDBot是一个简单的易于理解和使用的搜索引擎。它目前在一个文本文件(urls.txt)列出的URL中爬行,将结果保存在一个数据库中。它也支持一个简单的Web服务器,这个服务器接受来自浏览器的查询并返回响应结果。它可以方便地集成到你的Web站点中。 更多BDDBot信息 Zilverline Zilverline是一个搜索引擎,它通过web方式搜索本地硬盘或intranet上的内容。Zilverline 可以从PDF, Word, Excel, Powerpoint, RTF, txt, java, CHM,zip, rar等文档中抓取它们的内容来建立摘要和索引。从本地硬盘或intranet中查找到的结果可重新再进行检索。Zilverline支持多种语言其中包括中文。 更多Zilverline信息 XQEngine
智慧工厂调度系统解决方案
智慧工厂调度系统解决方案(此文档为word格式,下载后您可任意修改编辑!)
目录 1项目概述 (4) 1.1背景 (4) 1.2目标与意义 (4) 2设计依据 (5) 2.1工作原理 (5) 2.2系统优势 (6) 3智能调度系统 (7) 3.1系统框架 (7) 3.2系统功能 (8) 3.2.1全局化定位监控 (8) 3.2.2人员、物资与运输工具信息管理 (9) 3.2.3运输工具导航 (10) 3.2.4重点区域与危险区域管理 (11) 3.2.5无线传输系统 (12) 3.2.6实时搜索 (12) 3.2.7视频联动 (13) 3.2.8报表统计分析 (14) 3.3解决方案 (14) 3.3.1识别系统 (14) 3.3.2装配工具自动化控制 (14) 3.3.3质量检测流程的优化 (14)
3.3.4设备实时定位 (15) 3.3.5防撞系统 (15)
1项目概述 1.1背景 中国正在成为世界汽车制造工业的集聚中心,新世纪以来,我国汽车产业蓬勃发展,成绩举世瞩目。从产量来看,从2000年207万辆,大幅增至2015年2450万辆,增长将近12倍,并从2009年开始位居世界第一位,2015年更是创下全球历史新高;从产值来看,2015年我国汽车产业工业销售产值达6.63万亿元,相比2000年增长超过10倍,占GDP的比重超过10%。单从规模上讲,我国已经成为汽车制造大国毋庸置疑。 然而经过十多年的高速发展,中国汽车产业在2015年出现了拐点,中国汽车协会数据表明,2015年汽车行业总营业收入尽管仍然保持着3%以上的增长,但是增长速度迅速下降了超10%,而利润总额近十年来首次出现了下滑的情况。在营业收入和销量上涨的情况下,整体利润的下滑无疑是一个异常的信号。1.2目标与意义 汽车模型的需求数量是年年飙升,从2012年到2019年,可用汽车模型的数量预计增长幅度超过20%。我国大约提供300左右的不同种类的车型,而且每种车型都有多个定制选项,相当于几百万亿的变化可能。在同一生产线上生产不同的汽车模型,而管理这种产品复杂变化将有大量的挑战。如何防止工人在每辆车有不同组合的情况下出现错误?如何保证运输的物资是组装所需要的物资?如何确保资产工具正确的时间在正确的位置,误差为零?等等问题不胜枚举。 一家汽车制造厂的汽车装配线上,每辆汽车需要在流水线上移动到达不同的装配点,传统管理办法是工人输入数据终端或者用条形码扫描分配到装载点,如果在生产过程中一旦出现错误,在最后质量检测阶段又需要大量人力与物力来纠正。利用定位标签固定在车辆、工人的操作工具和所需要的物资上,就可以实时感知工人的装配是否正确,并监控整个操作过程,大大减少了人为操作失误带来的损失。 智慧工厂调度系统能够在传统的应用环境中达到 15cm 的定位精度,并具有很好的稳定性;借助该系统,汽车制造厂能够实现人员、物资与车辆的实时定位,
苏宁大数据平台任务调度模块架构设计
苏宁大数据离线任务开发调度平台实践:任务调度模块架构设计 weixin_34262482 2019-02-01 08:00:00 375 收藏2 作为国内最大的电商平台之一,苏宁每天要处理数量巨大的数据。为了更快速高效地处理这 些数据,苏宁调度平台采取了哪些措施呢? 本文是苏宁大数据离线任务开发调度平台实践系列文章之上篇,详解苏宁的任务调度模块。 目录 1.绪言\t1 2.设计目标与主要功能\t2 3.专业术语\t3 4.调度架构设计\t5 5.服务重启和任务状态恢复\t6 5.1 Master Active 组合服务\t7 5.2 Master HA高可用设计\t7 5.3 Recover任务状态恢复设计\t7 6.Web API接口服务\t9 7.后续\t10 1.绪言 在上一篇文章《苏宁大数据离线任务开发调度平台实践》中,从用户交互功能、任务调度、 任务执行、任务运维和对外服务等几方面,宏观层面进行了理论和实践的概述。 产品的用户功能重点需要把握用户实际的任务开发运维需求,合理的规划设计产品功能,在 使用和运维上便于用户操作,降低用户的开发使用成本。简单的说就是主要保证用户任务、 任务流等关键元数据的配置信息的准确性,以及任务状态的查询和干预能力,技术上实现不 存在难点,在此不再详细说明。 任务执行模块侧重于任务被领取后,如何根据任务类型选择不同的执行器(Executer)提交 任务执行,并将任务的执行状态及时准确的返回,由任务调度服务根据返回状态做相应的下 一步处理,除此以外还涉及到任务资源加载、任务配置解析与转换、自身健康状态检查与汇 报、worker进程与任务子进程通信、任务隔离、对外接口服务等,这块将在后面一节再跟
基于GPS定位的车辆调度管理系统
基于GPS和无线网络的车辆调度管理系统 大唐高鸿数据网络技术股份有限公司 2005.1
、八 大唐高鸿公司提供的车辆调度管理系统(最新软件版本 3.0 ),采用Client (客户机) /Server (服务器)模式,以gpsOne/GPS技术为基础,综合运用GIS (Geographic In formation System ,地理信息系统)技术、CDMAIX^动通信技术,可广泛用于各种车辆、船舶和其它移动目标的位置跟踪、指挥调度、应急救急等。同时,所配移动终端具有全球定位、防盗报警、监听录音、紧急求助、车况记录、车载电话、移动上网、图像传输等功能。 本系统最大的特点在于: 采用gpsOne/GPS定位,gpsOne技术可以最大限度缩少定位盲区;支持CDMA1数 据传输; 同时支持通过GSM/CDM短信中心和GSM/CDM前置机两种通讯方式,能满足位置服务商和集团用户的不同需要; 有C/S 模式、B/S 模式,人性化操作,自动换图,无缝拼接;支持手机短信查询。
一、项目综述.......................................................................... 二、系统方案......................................................................... 2.1系统简介........................................................................ 2.2 方案论证....................................................................... 2.2.1 GPS定位原理......................................................... 2.2.2 gpsOne 定位原理...................................................... 2.2.3系统构架比较 ........................................................... 2.3结论............................................................................ 三GPSONE/GP弄辆调度管理系统 ..................................................... 3.1概述............................................................................ 3.2系统结构........................................................................ 3.3系统功能........................................................................ 3.3.1 系统实现功能.......................................................... 3.3.2 gpsOne/GPS定位终端功能 .............................................. 3.4系统特点....................................................................... 3.4.1 成熟的短信网关技术..................................................... 3.4.2成熟的监控中心软件和终端硬件产品 ...................................... 3.4.3完善的技术服务保障体系 ................................................ 3.4.4 系统其他优点........................................................... 3.5系统性能指标.................................................................... 3.5.1系统容量 ............................................................... 3.5.2定位精度 ............................................................... 3.5.3实时性................................................................. 3.5.4移动定位终端工作参数 ................................................... 附录A:公司情况简介 .................................................................. A.1公司简介........................................................................ A.2技术、工艺、设备介绍........................................................... A.2.1产品技术及工艺优势..................................................... A.2.2主要产品...............................................................
时间片轮转进程调度模拟算法的实现
武汉理工大学华夏学院课程设计报告书 课程名称:操作系统原理 题目:时间片轮转进程调度模拟算法的实现系名:信息工程系 专业班级:计算机1132班 姓名:李杰 学号: 10210413209 指导教师: 司晓梅 2015年 6 月 26日
武汉理工大学华夏学院信息工程系 课程设计任务书 课程名称:操作系统原理课程设计指导教师:司晓梅 班级名称:计算机1131-2 开课系、教研室:自动化与计算机 一、课程设计目的与任务 操作系统课程设计是《操作系统原理》课程的后续实践课程,旨在通过一周的实践训练, 加深学生对理论课程中操作系统概念,原理和方法的理解,加强学生综合运用操作系统原理、 Linux系统、C语言程序设计技术进行实际问题处理的能力,进一步提高学生进行分析问题 和解决问题的能力,包含系统分析、系统设计、系统实现和系统测试的能力。 学生将在指导老师的指导下,完成从需求分析,系统设计,编码到测试的全过程。 二、课程设计的内容与基本要求 1、课程设计题目 时间片轮转进程调度模拟算法的实现 2、课程设计内容 用c/c++语言实现时间片轮转的进程调度模拟算法。要求: 1.至少要有5个以上进程 2.进程被调度占有CPU后,打印出该进程正在运行的相关信息 提示: 时间片轮转调度算法中,进程调度程序总是选择就绪队列中的第一个进程,也就是说按照先来先服务原则调度,但一旦进程占用处理机则仅使用一个时间片。在使用完一个时间片后,进程还没有完成其运行,它必须释放出处理机给下一个就绪的进程,而被抢占的进程返回到就绪队列的末尾重新排队等待再次运行。 1)进程运行时,只打印出相关提示信息,同时将它已经运行的时间片加1就可以了。 2)为进程设计出PCB结构。PCB结构所包含的内容,有进程名、进程所需运行时间、已运行时间和进程的状态以及指针的信息等。 3、设计报告撰写格式要求: 1设计题目与要求 2 设计思想 3系统结构 4 数据结构的说明和模块的算法流程图 5 使用说明书(即用户手册):内容包含如何登录、退出、读、写等操作说明 6 运行结果和结果分析(其中包括实验的检查结果、程序的运行情况)
大数据相关开源系统简介汇总
大数据相关开源系统简介汇总 本片博客介绍大数据相关的开源系统以及他们对应的一句话简介, 对于各位想大概了解大数据都有哪些开源系统的同学有帮助。各种相关开源系统简介: 如下是Apache基金支持的开源软件 hdfs 跟GFS类似, 一个分布式文件系统。 mapreduce 跟Google的MapReduce类似, 一个典型的简单的分布式计算框架。 yarn 资源管理系统, 跟Mesos类比。 Avro 跟PB类似, 用于将数据结构序列化成字节码, 在不同的语言之间切换。 官方举例是将C转换给Pig。 BigTop 一个给Hadoop打包和测试的软件。其本来是cloudera公司自己给自己写的一个方便OP部署和搭建环境的工具, 不过因为写得不错, 已经成为了Apache顶级项目。目前支持系列Hadoop生态链中的软件: Zookeeper, Flume, HBase, Pig, Hive, Sqoop, Oozie, Whirr, Mahout, SolrCloud, Crunch, DataFu and Hue Chukwa 收集各种实时监控数据(比如日志)并固化到HDFS上的事情。 Drill Google的Dremel的开源版本。PB以上数据实时秒级查询。 Flume 用来做数据迁移的工具。支持数据包括Avro, files, 系统日志, 落地的系统包括HDFS, HBase。
HBase Google的BigTable的开源版本。宽列存储, 底层基于HDFS。 HCatalog 为HDFS做的一个管理metadata的系统。基于Hive, 提供服务给MapReduce, Pig, 将来会支持HBase。 Hive 支持HSQL, 将SQL转换成MapReduce任务。 Mahout 一个数据挖掘, 机器分析的算法库。 Oozie 用来管理Hadoop中的多轮任务的工具, 类似DAG管理工具。 Tez 也是多个任务的DAG管理工具, 但是其做得更底层,直接替代了MR的调度程序,多个任务之间的数据传递不用再落地到hdfs上了。 Pig 跟Hive类似, 提供比裸写MR更友好的界面, 然后翻译成MapReduce。只是Hive提供的是SQL, Pig提供的是更高级别的语言Pig-Latin, 供用户做数据挖掘和分析。 Sqoop Sql-to-Hadoop。将关系型数据库中的数据导入到Hadoop当中。 ZooKeeper 提供高可用的存储服务。内部采用paxos一致性协议。 Whirr 用于将Hadoop放到各种IaaS里面去运行的环境部署类项目。 Crunch
出租车智能调度系统_baidu
智能出租车系统 1 系统概述 利用全球定位、无线通讯、视频识别、数据库等技术,实时采集出租汽车的地理位置、运动信息、载客状态,候车点人员数量,通过数据分析和处理,提供远程监测、报警、智能约车、电子稽查等服务。该系统将合理利用交通资源,有效缓解出租车空载和乘客约车难、等车时间长的矛盾问题,同时为乘客营造安全舒适的乘车环境。 2 现状和需求分析 目前全国出租车保有量有150多万部,但是出租车的快速增长同时,带来了很多交通、治安、管理上的问题,主要问题如下: 1.出租车资源利用率不高,空载率较高,相反城市交通资源紧。 2.乘客普遍反映约车难、等车时间长。郊区经常出现出租车过少的现象,市区 有些大型候车点“人多车少、人少车多”的不合理现象普遍存在。 3.由于出租车行驶围广,安全防性能差,不法分子就把出租车作为其主要犯罪 目标,抢劫甚至杀害出租车司机的案件屡有发生,给社会治安和人民群众的生命财产安全带来极大的危害。 4.乘客在出租车上丢失物品时有发生,但找回失物的可能性小。 5.出租车乱停乱放、随意越线掉头、超速超车、冲红灯、乱鸣喇叭、不按规则 营运等交通行为突出,扰乱了正常交通秩序,导致交通事故高发。 6.黑出租车无证运营,不仅扰乱了正常的市场秩序,也成为困扰交通管理部门 的一个难题。传统的稽查手段主要是依靠稽查人员的经验,工作效率并不高,信息共享程度有限。 城市出租车数量近年来增长迅速,但是行业管理的相对落后带来了种种弊病:效率低,费用高,实时性差,调度分散,资源浪费,行业发展受阻。为了适应城
市交通的不断发展和社会治安的改善,出租车的智能化管理已提上议事日程 3 应用解决方案 约车专员 多个服务器工作站交换机路由器 大屏控制中心无线网络通讯出租车控制指挥中心 GPS 接收模块 无线网络收发模块控制模块 驾驶员信息交互设备 出租车前端 大型出租车候车点无线网络通讯 无线网络收发模块 LED 信息牌摄像头手机上网约车外网 远程访问公共服务接口 约车业务接口 公共服务部门紧急按钮 有源RFID 标签摄像头 基站 PDA 业务接口 图3.1 系统设计框图(功能整合到一起) 如上图所示,本系统通过在GPS 定位,视频识别,无线传输等技术,为出租车驾驶员合理安排等车路线,安全驾驶提供帮助,为乘客智能约车,了解周边出租车信息提供必要的服务,同时驾驶中心可以对出租车进行监控和黑车稽查。
车辆GPS调度管理系统解决方案
×××××××× 车辆GPS调度管理系统解决方案 甘肃通服信息技术分公司 二〇一二年十月
目录 一、引言 (3) 二、需求分析 (3) 三、系统解决方案 (4) 1.系统结构 (4) 2.硬件选型及特性 (5) 四、系统主要功能 (6) 1.基本功能 (6) 1)车辆实时定位与跟踪 (6) 1)集群定位 (7) 2)紧急报警 (7) 3)历史轨迹查看及回放 (8) 4)运营数据管理 (8) 5)电子围栏和偏航报警(线路监控) (9) 6)分段限速、超速监控 (9) 7)组织及权限管理 (10) 2.专用功能 (10) 1)语音调度与通话 (10) 2)3G图像监控 (10) 五、系统先进性 (11) 1.便捷的查车方式 (11) 2.多种电子地图显示 (12) 3.便捷的二次地图开发 (13) 六、系统效应 (13) 七、售后服务 (13) 1、硬件售后服务 (13) 2、软件售后服务 (14)
一、引言 非常感谢××××××××提供给甘肃通服信息技术分公司制作通信方案的机会。能为贵单位信息化建设工作尽一份力量,我们感到非常荣幸。 在了解了贵单位的需求现状以后,我们立即组织相关部门进行了深入、细致的研究,并先后多次和贵单位业务主管部门沟通交流。现根据我们对贵单位需求的理解,结合中国通信服务甘肃公司综合信息服务的优势,我们制作了此方案,敬请贵单位领导审阅。我们相信,凭借中国通信服务甘肃公司完善的服务、科学的管理、丰富的经验以及强大的综合信息服务提供能力,我们完全有能力满足贵单位全面信息化建设服务的要求,为贵单位提供满意的解决方案和优质的持续服务。 我们对建设项目需求的理解可能有不够准确的地方,如果方案中出现不符合需求的情况,欢迎提出宝贵意见,以便改进和提高我们的工作,提供更符合您需求解决方案。 二、需求分析 随着企业经营规模的增大,内部车辆的增多,车辆管理工作变的越来越烦杂。相关管理部门会常常需要思考以下一些问题: ?要求为司机规划、指引最佳线路,减少司机走错路,减少油耗。 ?要求车辆统一管理和高效调度,提高车辆的利用率 ?要求掌握车辆实时信息,对车辆实施实时监控要 ?求杜绝驾驶员不合理用油、过桥过路费用过高 ?要求防止违章驾驶,保证行车安全 ?如何做到特种车辆实时状态监控? ?如何对服务行业车辆司乘人员如何监管? ?特殊环境下如何得到远程监控对象的位置及状态?
模拟进程调度功能的设计与实现操作系统课程设计(含源文件)
目录 1、设计目的意义 (2) 1.1、目的意义 (2) 1.2、实现目标 (2) 2、设计方案 (3) 2.1、软硬件环境 (3) 2.2、开发工具 (3) 2.3、思路 (3) 3、程序功能模块设计 (4) 3.1、总体模块 (4) 3.2、部分模块 (4) 3.3、详细功能描述 (6) 4、程序总控流程图 (6) 5、数据结构设计 (8) 5.1、PCB结构 (8) 5.2、进程状态结构 (8) 5.3、控件结构 (9) 6、程序代码结构 (9) 7、程序主要代码解析 (10) 8、测试数据及测试结果 (15) 8.1、运行时部分界面 (15) 8.2、数据测试记录 (17) 9、设计过程中遇到的问题及解决方法 (18) 10、结论 (18) 10.1、系统实现情况 (18) 10.2、系统特点 (18) 10.3、设计体会及收获 (18) 11、参考资料 (19)
模拟进程调度功能的设计与实现 1、设计目的意义 1.1、目的意义 ●通过课程设计理解进程调度的概念,深入了解进程控制的功能、进程的创建、删除以 及进程各个状态间的转换过程;实现先来先服务、时间片轮转、最短作业优先、优先级调度算法对进程进行的调度过程;通过观察有关的队列结构的内容的动态变化过程深入体会各个调度算法的特点;从而能够更好的巩固从书本上学到的知识。 ●编程过程中需要建立队列等结构进行各种操作,通过该次课程设计,我们更加从实用 的角度对《数据结构》课程内容进行更深入理解和更熟练的应用。 ●使用C++语言进行编程,通过对调度功能的编程实现,不但能有效训练我们对编程语 言的熟练使用,还能促进我们独立思考解决问题、以及独立查新获取知识的能力。 1.2、实现目标 ●一个进程的生命期可以划分为一组状态,这些状态刻画了整个进程。系统根据PCB结 构中的状态值控制过程。在进程的生命期内,一个进程至少具有5种基本状态,它们是:初始态、执行状态、等待状态、就绪状态和终止状态。通过系统设计,实现进程相关数据结构的创建和查看功能;实现多种进程调度算法:先来先服务算法、优先级调度算法、时间片轮转法等;实现对执行进程的阻塞,对等待进程的唤醒等功能。进程的转换过程如下 2、设计方案
六大搜索引擎的比较
一、界面、广告以及速度搜索引擎在我们日常操作中的使用频率非常高,大家使用它的目的都非常明确,就是用它来搜寻需要的内容,而不会为搜索引擎的页面做过多的停留,因此搜索引擎的界面设计和速度就对我们的使用产生不小的影响,下面来看看这六款搜索引擎在界面和速度上的表现。谷歌、百度和微软的Live Search,这三大搜索引擎的界面大家都已经相当熟悉,它们有着共同的特点,就是简洁至极:网站LOGO、搜索框和按钮以及个别功能服务链接,除此以外,页面上就没有其他多余和花哨的东西了,给人的感觉非常清爽,界面一目了然,特别是Live Search在不失简洁的同时还通过一些小脚本和背景图片使得页面整体更加美观。三者使用起来都很方便,并且首页界面上没有任何第三方的广告。搜索结果页面,三者同样是采用简洁的风格,页面左侧排列着搜索结果,百度搜索结果页面右侧有不少广告,谷歌视关键词的不同也可能出现右侧广告。 Live Search的界面十分简洁且美观 百度搜索结果页面右侧的广告与上面三者相比,雅虎全能搜在界面上显得更为活泼、色彩更加多样,并且在首页内容上也更丰富。首页上除了常规的搜索所需组成部分外,雅虎全能搜还加入了天气预报、邮箱登录的显示区域。虽然这些占据了一点点页面,但是它们功能实用且不影响正常使用。雅虎全能搜的搜索主页 搜狗搜索的界面可谓结合了谷歌和Live Search:在布局上
与谷歌类似,而在细节上与Live Search有着异曲同工之妙;而搜索新军——网易有道的界面与谷歌、百度站在同一阵线,风格、版式都十分一致。在搜索结果页面中,搜狗搜索页面左侧有少量广告。总的来说,六款搜索引擎的界面设计都比较合理、美观、大方。雅虎全能搜的界面稍有不同,加入了天气预报和邮箱模块,而其他五款都尽量精简,其中谷歌、百度和有道趋于一致,采用最简的风格,而Live Search和搜狗在首页的一些细节上多加以了一些修饰。此外,值得一提的是一些搜索引擎对于Logo文化的重视,在传统的节日或者一些特殊的纪念日时都会将首页的Logo徽标换成与该日子相关的设计。其中在这方面要数谷歌和百度做得最为出色:无论是三八节、五一节这样的国际节日,或者情人节、万圣节这样的西方舶来物,还是春节、清明、端午等传统的中国农历节日,谷歌和百度都会精心设计相应的节日Logo;此外,谷歌在一些特殊的纪念日,如达芬奇诞辰、地球日之类的纪念日也会推出专门的徽标;而百度近期开始定期在首页推出一个搜索封面人物,以此反映对互联网时代风云人物的价值取向,十分有特色。雅虎和搜狗在节日Logo设计方面也有所表现,在节日时也可经常看到其专门的徽标;网易有道正式版新近推出不久,我们还无法对其在特殊Logo的设计上是否会有所表现作出评价。搜索引擎的特色Logo其实并不仅仅是一个单纯的设计,它还有更多的作用:它承载了一种信息,传达了搜索引擎提供商对于创新、
AGV调度系统解决方案
A G V调度系统解决方案-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN
AGV调度系统解决方案
目录 一项目概述...................................................错误!未定义书签。二系统架构...................................................错误!未定义书签。三软件系统架构...............................................错误!未定义书签。四系统功能...................................................错误!未定义书签。 1 AGV任务调度 ...........................................错误!未定义书签。 2实时路径规划 ...........................................错误!未定义书签。 3交通管制 ...............................................错误!未定义书签。 4现场设备信号采集与动作控制..............................错误!未定义书签。 5 MES或ERP接口..........................................错误!未定义书签。 6现场呼叫接口 ...........................................错误!未定义书签。 7设备工况监控 ...........................................错误!未定义书签。五系统配置建议...............................................错误!未定义书签。
C语言实现任务调度
任务调度 ①问题描述 多用户多任务操作系统中,多个任务同时共享计算机系统资源。为了使多个任务均能够顺利执行,操作系统要按一定的原则对它们进行调度,使它们按一定的次序进行。设只有一个CPU,现有多个任务,它们需要CPU服务的时间已知。在下列假设下,按平均等待时间最短为原则,设计算法求出任务的执行顺序。 ●忽略任务提交的时间差,即认为各任务同时提交。 ●各任务不同时提交。 ②基本要求 ●为任务列表设计数据结构和存储结构。 ●任务输入,至少包括任务编号及所需CPU的服务时间,任务数不得少 于5个。 ●如果按提交顺序执行,求出每个任务的开始执行时间、终止时间、等待 时间和所有任务的平均等待时间。 ●按平均等待时间最短,设计任务调度算法,输出任务的执行序列;求出 每个任务的开始执行时间、终止时间、等待时间和所有任务的平均等待 时间;并把结果与上一时间对比。 ③设计要点提示 ●为使各任务平均等待时间最短,如果忽略任务提交的时间差,调度时应 该按短任务优先进行调度,即:按照各任务需要CPU服务时间的长短, 确定执行顺序,短的在前,长的在后。 例:任务列表2如下,则执行序列如表3所示。 表2 任务列表 任务所需CPU时间(s) 任务所需CPU时间(s) P1 8 P5 9 P2 4 P6 20 P3 12 P7 15 P4 5 表3 任务执行序列 任务所需CPU时间(s) 等待时间结束时间开始时间P1 4 0 4 0 P2 5 4 9 4 P3 8 9 17 9 P4 9 17 26 17 P5 12 26 38 26 P6 15 38 53 38 P7 20 53 73 53 ●根据上一问题的分析,需要根据任务列表,按任务的CPU服务时间进 行排序。 ●如果考虑任务提交的时间差,应该按“最短剩余时间”优先进行调度。 调度发生在每次任务提交时,从未完成任务中选择需要CPU时间最短 的任务。
GPS公共车辆跟踪调度系统设计方案
GPS 公共车辆跟踪调度系统 设计方案 GPS 车辆应用系统的构成 GPS 车辆应用系统主要由GPS 车辆跟踪调度系统和车辆导航系统两大部分组成,它们在功能上截然不同,一种是用于车辆的防盗,一种则是用于车辆的自主导航。 GPS 共车辆跟踪调度系统结构 一、通信系统 通信系统包含GPRS/GSM 实时通信模块、车载终端远程管理模块、车载终端软件无线升级模块,通信服务器负载均衡模块、智能调度模块。 应用GSM 通信技术的车载定位系统一般由三部分构成:①车载单元;②监GPS 共车辆跟 踪调度系统 通信 系统 调度 管理 系 统 GIS 系统 管理调度呼叫中心 WEB 服务系统
控中心;③GSM通信服务系统。 主要功能为: (1)防盗报警功能:当有紧急情况发生时,用户可以触发隐蔽的报警按钮,车载单元会自动将GPS接收机中的位置数据通过GSM手机的短消息功能传送给监控中心。防盗激活功能,当车辆遭遇非法入侵时自动发送报警信息至控制中心; (2)导航功能:GPS提供移动目标的准确位置、速度和方向等数据,无差分的定位精度在10m左右,差分精度为3-5m。系统可以通过调度中心进行导航,也可以在终端上存储电子地图。 (3)通话功能:车载GSM手机可进行通话,当用户离车时还可将手机取下正常使用。 (4)服务:提供一组服务按钮,当车主需要服务时按下相应按钮,由服务中心提供服务。 二、WEB服务系统 WEB服务系统把车辆地理信息在互联网上发布,供有权限的用户使用及各出租汽车公司监控本单位的车辆。其包括车辆地理信息显示、车辆资料查询、车辆身份识别。 三、GIS系统 GIS 的组成部分 从应用的角度,地理信息系统由硬件、软件、数据、人员和方法五部分组成。硬件和软件为地理信息系统建设提供环境;数据是GIS的重要内容;方法为GIS建设提供解决方案;人员是系统建设中的关键和能动性因素,直接影响和协调其它几个组成部分。 硬件主要包括计算机和网络设备,存储设备,数据输入,显示和输出的外围设备等等。 软件主要包括以下几类:操作系统软件、数据库管理软件、系统开发软件、GIS 软件,等等。 GIS软件的选型,直接影响其它软件的选择,影响系统解决方案,也影响着系统建设周期和效益。 人是GIS系统的能动部分。人员的技术水平和组织管理能力是决定系统建设成败的重要因素。系统人员按不同分工有项目经理、项目开发人员、项目数据人员、系统文档撰写和系统测试人员等。各个部分齐心协力、分工协作是GIS系统成功建设的重要保证。 四、车辆调度管理系统 GPS车辆调度管理系统
进程调度算法的模拟实现
操作系统课程设计报告题目:进程调度算法的模拟实现_ 专业计算机科学与技术 学生姓名 班级 学号 指导教师 发放日期2015.1.30 信息工程学院
目录 1 概述 (1) 2 设计原理 (1) 2.1先来先服务算法 (1) 3 详细设计与编码 (2) 3.1 模块设计 (2) 3.2 系统流程图 (2) 3.3 系统详细设计 (2) 4 结果与分析 (6) 4.1 测试方案 (6) 4.2 测试结果 (6) 4.3 测试结果分析 (9) 5 设计小结 (10) 6 参考文献 (10) 附录程序代码 (12)
进程调度算法的模拟实现 进程调度算法的模拟实现 1 概述 选择一个调度算法,实现处理机调度,进程调度算法包括:先来先服务算法,短进程优先算法,时间片轮转算法,动态优先级算法。可选择进程数量,本程序包括四种算法,用C或C++语言实现,执行时在主界面选择算法(可用函数实现),进入子页面后输入进程数,(运行时间,优先数由随机函数产生),执行,显示结果。 2 设计原理 2.1先来先服务(FCFS)算法 每次调度都是从后备作业队列中选择一个或多个最先进入该队列的作业,将它们调入内存,为它们分配资源创建进程,然后放入就绪队列 2.2 时间片轮转法(RR)算法 系统将所有的就绪进程按先来先服务的原则排成一个队列,每次调度时,把CPU分配给队首进程,并令其执行一个时间片。时间片的大小从几ms到几百ms。当执行的时间片用完时,由一个计时器发出时钟中断请求,调度程序便据此信号来停止该进程的执行,并将它送往就绪队列的末尾;然后,再把处理机分配给就绪队列中新的队首进程,同时也让它执行一个时间片。 2.3短作业优先(SJF)算法 短作业优先调度算法是从就绪队列中选出一个估计运行时间最短的进程,将处理机分配给它,使它立即执行并一直执行到完成,或发生某事件而被阻塞放弃处理机时再重新调度。 2.4最高优先权优先(HRRN)算法 优先权调度算法是为了照顾紧迫型作业,使之在进入系统后便获得优先处理,引入最高优先权优先调度算法。动态优先权是指在创建进程时所赋予的优先权,是可以随进程的推进或随其等待时间的增加而改变的,以便获得更好的调度性能。