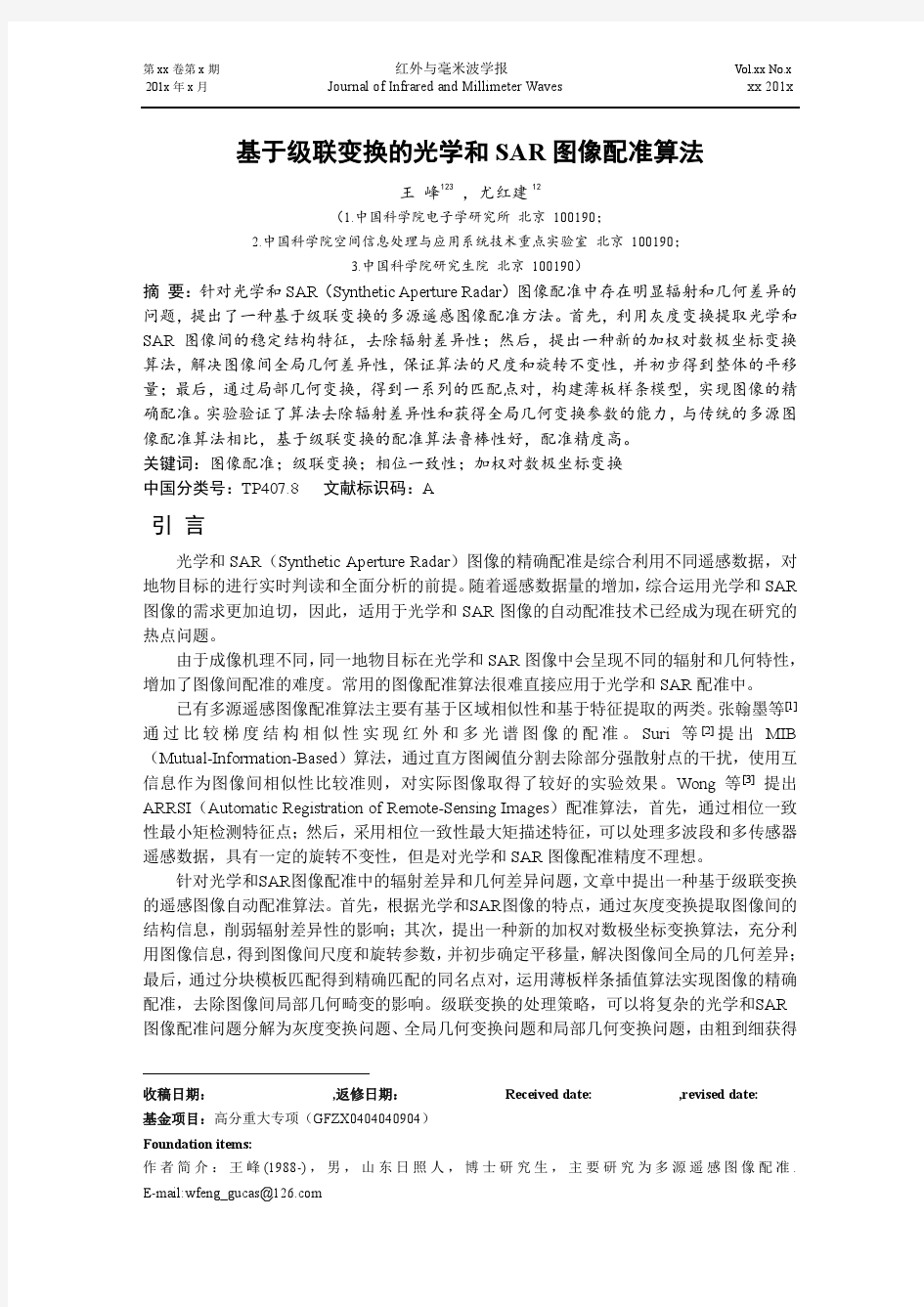
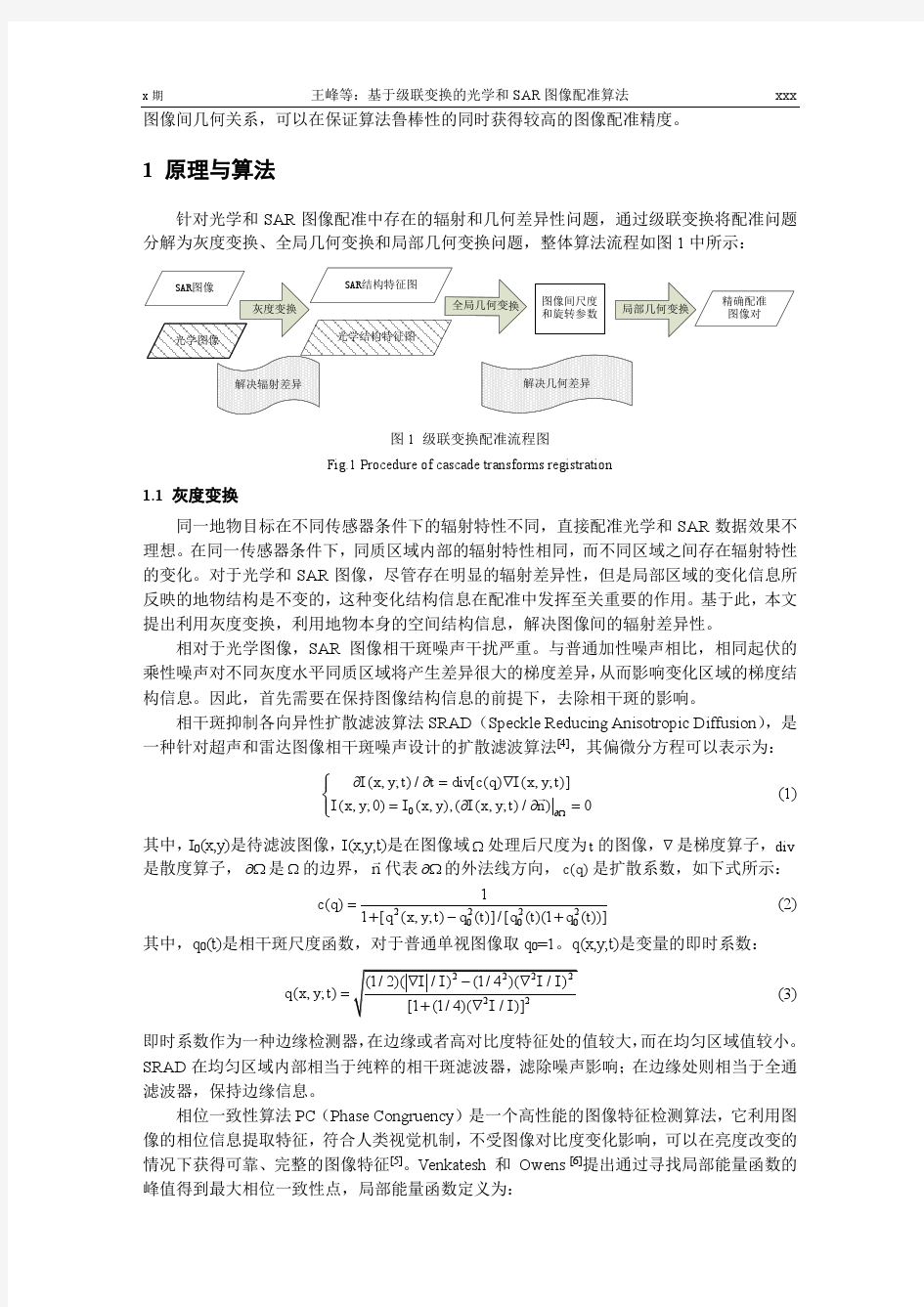
201508_SCI_基于级联变换的光学和SAR图像配准算法
地的总结图像配准算法
图像配准定义为:对从不同传感器、不同时相、不同角度所获得的两幅或多幅图像进行最佳匹配的处理过程[2]。图像配准需要分析各分量图像上的几何畸变,然后采用一种几何变换将图像归化到统一的坐标系统中。在配准过程中,通常取其中的一幅图像作为配准的标准,称之为参考图像;另一幅图像作为配准图像。 图1-1 图像配准的基本流程 图1-2 图像配准方法分类
根据配准使用的特征,图像配准的方法大致可分为三类: (1)基于图像灰度的配准算法。首先从参考图像中提取目标区作为配准的模板,然后用该模板在待配准图像中滑动,通过相似性度量(如相关系数法、差的平方和法、差的绝对值法、协方差法)来寻找最佳匹配点。 (2)基于图像特征的配准算法。该算法是以图像中某些显著特征(点、线、区域)为配准基元,算法过程分为两步:特征提取和特征匹配。首先从两幅图像中提取灰度变化明显的点、线、区域等特征形成特征集。然后在两幅图像对应的特征集中利用特征匹配算法尽可能地将存在对应关系的特征对选择出来。对于非特征像素点利用插值等方法作处理推算出对应匹配关系,从而实现两幅图像之间逐像素的配准。 (3)基于对图像的理解和解释的配准算法。这种配准算法不仅能自动识别相应像点,而且还可以由计算机自动识别各种目标的性质和相互关系,具有极高的可靠性和精度。这种基于理解和解释的图像配准涉及到诸如计算机视觉、模式识别、人工智能等许多领域。不仅依赖于这些领域中理论上的突破,而且有待于高速度并行处理计算机的研制。 从自动化角度来看,可以将配准过程分为自动、半自动和手动配准。 存在问题:如何提高图像的配准速度将是大范围遥感图像自动配准问题的要点;选取何种自动配准方案以保证图像的配准精度将是大范围遥感图像自动配准问题的另一要点。 2(,)[1((, f x y g f h x y 其中,h表示二维空间坐标变换。g表示灰度或辐射变换,描述因传感器类型的不同以及成像时气候等环境的影响所带来的图像灰度的变换。配准问题的实质就是要找到最优的空域变换h和灰度变换g,使得上述的等式成立,从而找到配准变换的参数 特征空间的选择通常要考虑以下几个因素:相似性;空间分布;唯一性。 在自动图像配准中对特征的理解可以分为两类。(1)基于灰度的方法:基于灰度的方法将重点放在特征匹配上,在其过程中并没有真正提取特征。一般所说的模板匹配法就是这种方法的代表。这种方法实际上将图像的灰度分布直接作为特征而构成匹配的基础。(2)基于特征的方法:基于特征的方法需要在图像中提取显著的特征:区域(森林、湖泊、农田等)、线(区域的边界、道路等)和点(区域的角
简述图像几何变换的类型与方法
简述图像几何变换的类型和方法 数字图像处理,就是利用数字计算机或则其他数字硬件,对从图像信息转换而得到的电信号进行某些数学运算,以提高图像的实用性。例如从卫星图片中提取目标物的特征参数,三维立体断层图像的重建等。总的来说,数字图像处理包括点运算、几何处理、图像增强、图像复原、图像形态学处理、图像编码、图像重建、模式识别等。目前数字图像处理的应用越来越广泛,已经渗透到工业、医疗保健、航空航天、军事等各个领域,在国民经济中发挥越来越大的作用。 图像的几何变换,通常包括图像的平移、图像的镜像变换、图像的转置、图像的缩放和图像的旋转等。 程序基本框架如下: 1 图像的平移 图像的平移是几何变换中最简单的变换之一。
1.1理论基础 图像平移就是将图像中所有的点都按照指定的平移量水平、垂直移动。设(x0,y0)为原图像上的一点,图像水平平移量为tx ,垂直平移量为ty ,则平移后点(x0,y0)坐标将变为(x1,y1)。 显然(x0,y0)和(x1,y1)的关系如下: ?? ?+= += ty y y tx x x 0101 用矩阵表示如下: ???? ????????????????=??????????1001001001111y x ty tx y x 对该矩阵求逆,可以得到逆变换: ?? ?? ? ???????????????--=??????????1111001001100y x ty tx y x 即???-=-= ty y y tx x x 1010 这样,平移后的图像上的每一点都可以在原图像中找到对应的点。例如,对于新图中的(0,0)像素,代入上面的方程组,可以求出对应原图中的像素(-tx ,-ty )。如果tx 或ty 大于0,则(- tx ,- ty )不在原图中。对于不在原图中的点,可以直接将它的像素值统一设置为0或则255(对于灰度图就是黑色或白色)。同样,若有点不在原图中,也就说明原图中有点被移出显示区域。如果不想丢失被移出的部分图像,可以将新生成的图像宽度扩大|tx |,高度扩大| ty |。
图像配准技术研究进展
第14卷第6期2007年12月 电光与控制 EU£CTRONICSOPTICS&CONTROL V01.14№.6 Dee.2007 文章编号:1671—637X(2007)06—0099—07 图像配准技术研究进展 刘松涛,杨绍清 (海军大连舰艇学院信息与通信工程系,辽宁大连116018) 摘要:图像配堆是解决图像融合、图像镶嵌和变化检测等问题的必要前提。其应用遍及军事、遥感、医学和计算机视觉等多个领域。筒要回顾了图像配准技术的发展史和研究现状.重点阐述了当前的技术热点和应用趋势,最后展望了进一步的研究方向。 关键词:图像配准;信息论;非刚性配准;虚拟结构 中图分类号:V243.6文献标识码:A Progressinimageregistrationtechniques LIUSong—taa,YANGShao—qing (Oept.ofInformation&CommtmicdionEt,g泌rit,.g,DafianNavalAcademy,Dalian116018,舀白Ⅺ) Abstract:Imageregistrationisessentialforallimageanalysistaskslikeimagefusion,imagemosaicandchangedetection.Itisusedwidelyinmilitarysystem,medicalimaging,remotesensing,computervision,etc.Thehistoryandcurrentetatusofimageregistrationtechniquesfirereviewedkeflywithemphasisonitscurrenttechnicalhotspotsandapplicationtrends.Someinterestingaspectsforfurtherstudya”pointedoutintheend. Keywords:imageregistration;informationtheory;110n—rigidregistration;virtualstructUre 0引言 图像配准是许多应用问题必须的预处理步骤,比如:时序图像的变化检测或多模图像融合,这些问题遍及军事、遥感、医学、计算机视觉等多个领域。许多领域都需要图像配准,实际应用过程可能会有所不同,但其中关键的因素是类似的。概括地说,图像配准是对取自不同时间、不同传感器或者不同视角的同一场景的两橱或多幅图像进行最佳匹配的过程,包括像素灰度匹配和空间位置对齐。 配准方法的分类可以依据不同的准则。Bro.wn…依据变换模型的复杂程度对配准方法进行分类,并归纳了配准技术的实现步骤:特征空问、相似度测量、搜索空间和策略。Maintz”1等则提出了9 收稿日期:2006—03—09修回Et期:2006—05—15 基金项目:国防预研基金资助项目(51403030604JBl40I);国家自然科学基金资助项目(60572160) 一 作者简介:荆松涛(1978一),男,河南孟津人,博士,主要研究方向为图像融合、耳标识别、成像跟踪、DSP开发 等。条分类准则,依次为:图像维数、配准特征的来源、变换模型、坐标变换域、交互性、优化策略、成像模式、配准对象、配准目标的特点等。作者参考Brown和Mainlz的分类方法,将配准技术概括为8个方面,包括:配准对象、特征提取、特征匹配、变换模型、优化策略、坐标变换与插值、系统实现及算法评估,并考虑每项内容的技术特性进行细分,然后依据某一算法的创新点进行分类。囊括所有方法的分类准则是不存在的,所提方法侧重于从总体上对配准方法进行考察,是一种相对能反映配准方法本质特征的分类方法。依据新的分类准则,作者已对图像配准技术的8个子方向进行了系统研究uJ。 1发展史和研究现状 国外从20世纪60年代就开始在图像配准领域进行研究“】,但直到1980年代才开始引起学者们的关注。到上世纪末,单模图像配准问题已基本解决,但多模图像配准由于涉及模式和领域的复杂性.仍需密切关注。国际上对图像配准技术曾做过调查”】,其结论是1990年代初技术文献明显增加。而
高中数学平面直角坐标系下的图形变换及常用方法
高中数学平面直角坐标系下的图形变换及常用方法 摘要:高中数学新教材中介绍了基本函数图像,如指数函数,对数函数等图像等。而在更多的数学问题中,需要将这些基本图像通过适当的图形变换方式转化成其他的图像,要让学生理解并掌握图形变换方法。 高中数学研究的对象可分为两大部分,一部分是数,一部分是形,高中生是最需要培养的能力之一就是作图解图能力,就是根据给定图形能否提炼出更多有用信息;反之,根据已知条件能否画出准确图形。图是数学的生命线,能不能用图支撑思维活动是学好初等数学的关键之一;函数图像也是研究函数性质、方程、不等式的重要工具。 提高学生在数学知识的学习中对图形、图像的认知水平,是中学数学教学的主要任务之一,教师在教学过程中应该确立以下教学目标:一方面,要求学生通过对数学教材中基本的图形和图象的学习,建立起关于图形、图象较为系统的知识结构;培养和提高学生认识、研究和解决有关图形和图像问题的能力。为达到这一目标,教师应在教学中让学生理解并掌握图形变换的思想及其常用变换方法。 函数图形的变换,其实质是用图像形式表示的一个函数变化到另一个函数。与之对应的两个函数的解析式之间有何关系?这就是函数图像变换与解析式变换之间的一种动态的对应关系。在更多的数学问题中,需要将这些基本图像通过适当的图形变换方式转化成其它图像,要让学生理解并掌握图像变换方法。 常用的图形变换方法包括以下三种:缩放法、对称性法、平移法。 1.图形变换中的缩放法 缩放法也是图形变换中的基本方法,是蒋某基本图形进行放大或缩小,从而产生新图形的过程。若某曲线的方程F (x ,y )=0可化为f (ax ,by )=0(a ,b 不同时为0)的形式,那么F (x ,y )=0的曲线可由f (x ,y )=0的曲线上所有点的横坐标变为原来的1/a 倍,同时将纵坐标变为原来的1/b 倍后而得。 (1)函数()y af x =(0)a >的图像可以将函数()y f x =的图像中的每一点横坐标不变纵坐标伸长(1)a >或压缩(01a <<)为原来的a 倍得到; (2)函数()y f ax =(0)a >的图像可以将函数()y f x =的图像中的每一点纵 坐标不变横坐标伸长(1)a >或压缩(01a <<)为原来的1a 倍得到. ①y=f(x)ω?→x y=f(ω x );② y=f(x)ω?→y y=ωf(x). 缩放法的典型应用是在高中数学课本(三角函数部分)介绍函数)s i n (?ω+=x A y 的图像的相关知识时,课本重点分析了由函数y=sinx 的图像通
图像配准的方法
图像配准的方法 迄今为止,在国内外的图像处理研究领域,已经报道了相当多的图像配准 研究工作,产生了不少图像配准方法。总的来说,各种方法都是面向一定范围 的应用领域,也具有各自的特点。比如计算机视觉中的景物匹配和飞行器定位 系统中的地图匹配,依据其完成的主要功能而被称为目标检测与定位,根据其 所采用的算法称之为图像相关等等。 图像配准的方式可以概括为相对配准和绝对配准两种:相对配准是指选择 多图像中的一张图像作为参考图像,将其它的相关图像与之配准,其坐标系统 是任意的。绝对配准是指先定义一个控制网格,所有的图像相对于这个网格来 进行配准,也就是分别完成各分量图像的几何校正来实现坐标系的统一。本文 主要研究大幅面多图像的相对配准,因此如何确定多图像之间的配准函数映射 关系是图像配准的关键。通常通过一个适当的多项式来拟合两图像之间的平移、旋转和仿射变换,由此将图像配准函数映射关系转化为如何确定多项式的系数,最终转化为如何确定配准控制点(RCP)。目前,根据如何确定RCP的方法和图像配准中利用的图像信息区别可将图像配准方法分为三个主要类别:基于灰度信 息法、变换域法和基于特征法[25],其中基于特征法又可以根据所用的特征属 性的不同而细分为若干类别。以下将根据这一分类原则来讨论目前已经报道的 各种图像配准方法和原理。 1基于灰度信息的图像配准方法 基于灰度信息的图像配准方法一般不需要对图像进行复杂的预先处理,而 是利用图像本身具有灰度的一些统计信息来度量图像的相似程度。主要特点是 实现简单,但应用范围较窄,不能直接用于校正图像的非线性形变,在最优变 换的搜索过程中往往需要巨大的运算量。经过几十年的发展,人们提出了许多 基于灰度信息的图像配准方法,大致可以分为三类:互相关法(也称模板匹配法)、序贯相似度检测匹配法、交互信息法。 (1)互相关法
图像变换
地球科学与环境工程学院 图像变换 课程名:《遥感数字图像处理》 班级: 学号: 姓名: 完成日期:2016.10.28
目录 一.目的和要求 (3) 1.目的 (3) 2.要求 (3) 3.软件和数据 二.实验内容 (3) 三.图像处理 (3) 1.傅里叶变换 (3) 2.主成分变换 (6) 3.缨帽变换 (9) 4.代数运算 (9) 5.彩色变换 (13) 四.实验心得 (15)
一.目的和要求 1.目的 掌握图像变换的基本操作方法,对比前后图像的差异,理解不同变换方法之间的区别。 2.要求 能够根据图像的特征设定傅里叶变换的滤波器,消除图像的声纹。 能够解释主成分变换后的图像,利用主成分变换消除图像中的噪声。 能够利用KT变换结果进行图像合成,解释地物信息。 熟练利用代数运算产生不同的波段组合。 利用色彩变换进行图像的合成和融合。 能够解释变换后的图像,并能根据工作目的选择合适的图像变换方法。 3.软件和数据 ENVI图像处理软件。 SPOT数据,TM数据和ETM数据。 二.实验内容 (1) SPOT图像的傅里叶变换。 (2) TM图像的主成分变换。 (3) TM图像的KT变换。 (4) TM图像的代数变换。 (5) ETM图像的彩色变换。 三.图像处理 1.傅里叶变换 傅里叶变换可以用于提取图像的特征、频率域滤波、周期性噪声的去除、图像恢复、纹理分析。本次实验中使用傅里叶变换去除SPOT图像中水体部分的条带噪声。 (1)图像的傅里叶正变换 傅里叶正变换是指定图像的一个波段,按照计算公式进行FFT,产生频率域图像,
下图是主菜单中的傅里叶变换窗口。 指定图像CJ_spot的一个波段Band1,进行傅里叶正变换,下图是经过傅里叶正变换得到的结果。 (2)设定滤波器 波段不同,频率域图像不同,需要定义不同的滤波器,常用的滤波器有低通,高通、带通、带阻、用户自定义等。实际工作中常用的是用户自定义滤波器,下图是滤波器自定义窗口。 用户自定义滤波器的操作包括选择滤波器类型和定义滤波器。 A.选择滤波器类型 在滤波器类型中选择用户自定义阻断滤波器,如下图所示。
医学图像配准技术 综述
医学图像配准技术 A Survey of Medical Image Registration 张剑戈综述,潘家普审校 (上海第二医科大学生物医学工程教研室,上海 200025) 利用CT、MRI、SPECT及PET等成像设备能获取人体内部形态和功能的图像信息,为临床诊断和治疗提供了可靠的依据。不同成像模式具有高度的特异性,例如CT通过从多角度的方向上检测X线经过人体后的衰减量,用数学的方法重建出身体的断层图像,清楚地显示出体内脏器、骨骼的解剖结构,但不能显示功能信息。PET是一种无创性的探测生理性放射核素在机体内分布的断层显象技术,是对活机体的生物化学显象,反映了机体的功能信息,但是图像模糊,不能清楚地反映形态结构。将不同模式的图像,通过空间变换映射到同一坐标系中,使相应器官的影像在空间中的位置一致,可以同时反映形态和功能信息。而求解空间变换参数的过程就是图像配准,也是一个多参数优化过程。图像配准在病灶定位、PACS系统、放射治疗计划、指导神经手术以及检查治疗效果上有着重要的应用价值。 图像配准算法 可以从不同的角度对图像配准算法进行分类[1]:同/异模式图像配准,2D/3D图像配准,刚体/非刚体配准。本文根据算法的出发点,将配准算法分为基于图像特征(feature-based)和基于像素密度(intensity-based)两类。 基于特征的配准算法 这类算法利用从待配准图像中提取的特征,计算出空间变换参数。根据特征由人体自身结构中提取或是由外部引入,分为内部特征(internal feature)和外部特征(external feature)。
【作者简介】张剑戈(1972-),男,山东济南人,讲师,硕士 1. 外部特征 在物体表面人为地放置一些可以显像的标记物(外标记,external marker)作为基准,根据同一标记在不同图像空间中的坐标,通过矩阵运算求解出空间变换参数。外标记分为植入性和非植入性[2]:立体框架定位、在颅骨上固定螺栓和在表皮加上可显像的标记。Andre G[3]等将该方法用于机器人辅助手术,对于股骨移植,位移误差小于1.5mm,角度误差小于3°,由于计算量小,可以实现实时配准。但是标记物必须事先被固定好,不能用于回顾性配准,而且该方法只适用刚体配准。 2. 内部特征 从医学影像中可以提取出点、线和面:血管的交点、血管、胸腹之间的横膈膜等,这些特征作为内标记点(internal marker) ,利用其空间位置同样可以求解出空间变换参数。Hill DL[4]用11个形态点对脑部配准,误差<1mm,方差为1.73mm。Meyer CR[5]除了血管树的交点,还使用了左右脑之间的间隔等特征。Maurer CR[6,7]赋予点、线、面等几何特征不同的权重(weighted geometrical features, WGF),进一步改进了算法。内标记点配准是一种交互性的方法,将3D图像配准简化为点、线和面的匹配,可以进行回顾性研究,不会造成患者的不适。但是医生对特征位置的判断影响到配准精度,为了克服人为误差,需要多次重复操作,以平均值作为最终结果。 表面匹配算法也利用了内部特征[8]:进行图像分割,提取出轮廓曲线、物体表面等内部特征,使2D/3D图像配准简化为2D曲线和3D曲面的匹配,不再考虑物体内部像素。典型的应用是刚体配准的“头帽”算法[9],从头部的3D图像中分割出表面轮廓,分别作为头模型和帽模型。配准的目标函数是头表面和帽表面之间的均方距离,该距离是空间变换参数的函数。表面匹配算法是一种自动算法,在物体表面轮廓相似并且清晰的情况下,配准效果很好。其不足之处在于:准确地进行图像分割很困难;不同模式的图像,如CT/PET图像,由于器官的轮廓差异较大,难于精确地匹配。 3. 在非刚体配准中的应用 进行非刚体配准前要确定物理模型,常见有弹性模型、粘稠液体模型、生物力学模型。通过在感兴趣区域中提取参考点、2D或是3D轮廓线,使待配准图像
图像匹配的主要方法分析
图像匹配的主要方法分析 在我国的图像处理中,有很多的关键技术正在不断的发展和创新之中。这些相关技术的发展在很大程度上推动了我国图像处理事业的发展。作为图像处理过程中的关键技术,图像匹配技术正在受到越来越多的关注。文章针对图像匹配的主要方法进行详细的论述,希望通过文章的阐述和分析能够为我国的图像匹配技术的发展和创新贡献微薄力量,同时也为我国图像处理技术的发展贡献力量。 标签:图像处理;图像匹配;特征匹配;方法 在我国的图像处理技术中,图像的匹配技术不仅仅是其中的重要组成部分,同时还是很多图像技术的发展创新的技术基础。例如图像技术中的立体视觉技术;图像技术中的运动分析技术以及图像技术中的数据融合技术等。通过上述内容可以看出,在我国的图像技术中,图像匹配技术具有非常广泛的应用。随着我国的相关技术不断的创新和发展,对于图像匹配技术的要求也是越来越高。这样就要求我国的图像匹配技术有更深层次的研究和发展。我国现阶段的研究主要是针对图像匹配过程中的匹配算法进行研究,希望借助研究能够更加有效的提升在实际的工作应用中的图像质量,同时也能够在很大程度上提升图像处理的图像分别率。文章的主要陈述点是通过图像匹配技术的具体方法进行优点和缺点的分析,通过分析优点和缺点来论述我国图像处理技术中的图像匹配技术的发展方向以及改进措施。近些年出现了很多的图像匹配方法,针对现阶段的新方法以及新的研究思路我们在实际的应用过程中要有一个非常清醒的选择。文章针对这一问题主要有三个内容的阐述。第一个是图像匹配技术的算法融合;第二个是图像匹配技术中的局部特征算法;最后一个是图像匹配技术中的模型匹配具体算法。 1 现阶段在世界范围内较为经典的图像匹配技术的算法 关于现阶段在世界范围内的较为经典的图像匹配技术的算法的阐述,文章主要从两个方面进行分析。第一个方面是ABS图像匹配算法。第二个方面是归一化相互关图像匹配算法。下面进行详细的论述和分析。 (1)算法一:ABS图像匹配算法。ABS图像匹配算法最主要的原理就是要使用模板的图像以及相应的匹配图像的搜索用窗口之间的转换差别来显示两者之间的关联性。图像匹配的大小在数值上等同于模板图像的窗口滑动顺序。窗口的每一次滑动都会引起模板图像的匹配计算。现阶段ABS的算法主要有三个,如下: 在选择上述三种计算方法的过程中要根据实际情况社情相应的阀值,否则会出现很高的失误率。上述的三种算法使用范围较狭窄。只使用与等待匹配的图像在模板影像的计算。 (2)算法二:归一化相互关图像匹配算法。归一化相互关的图像匹配算法在现阶段是较为经典的算法。通常专业的称法为NC算法。此计算方法主要是采
配准综述
图像配准是对取自不同时间,不同传感器或者不同视角的同一区域的两幅或者多幅图像进行匹配叠加的过程。随着技术手段的不断发展,人们对图像配准的要求也越来越离。包括配准方法的鲁棒性、算法的难易程度、算法的自主性等都是考量算法的指标。图像配准的方法中,有人提出过被广泛认同的四个巧骤: a.特征空间的选择 特征空间是指将运用到配准中元素的集合。特征空间包括很多方面,比如像素值,比如点、线,或者平面甚至是曲面。 b.搜索空间 搜索策略是指一系列配准变换操作的集合。搜索空间是建立在几何形变基础上的。而几何形变一般包括全局的和局部的几何形变。典型的全局变形包括平移,缩放,扭曲等变形以及它们的组合。而局部形变,对变换参数要求比较苛刻,因为某一套变换参数只能作用在局部形变区域,而其余区域需采用插值技术补充。然而,另外的变形区域则需要另外的变换参数去表述。在一般的处理中,我们将变换模型看成是一种先验知识。不然则需要考量所有的变换模型。 c.搜索策略 搜索策略是实施变换的依据。它的存在是为了找寻变换模型的最优解。常用的搜索策略有松弛模型法、牛顿法和共扼梯度法。 d.相似性度量 相似性度量是对采用的变换模型的评价。相似性度量主要是采用参考图像和配准图像之间的共有的特征之间的差异比较的方法来评价配准的情况。这其中的差异可以包括点位的误差,或者是灰度值相关的差异,还可以是在变换域之间的差异值等等。最常见的相似性度量是检测特征的欧氏距离。 上述的几个步骤构成了图像配准的基本框架。许许多多的算法充斥其中产生了种类繁多的配准方法。下面主要介绍下几种典型的配准算法。目前典型的配准算法中大致可分成基于灰度、基于特征和基于模型的方法。 基于灰度的配准算法 基于灰度的算法中,重点是对图像配准的过程上,而不是特征集的选择
图像自动配准算法阅读笔记
图像配准算法阅读笔记 一.图像配准的基本概念 图像配准主要包括四个方面:特征空间、搜索空间、相似性度量和搜索策略。 1.1特征空间 特征空间指参考图像与浮动图像中可用于配准的特征。特征空间包括:图像的灰度值、点、边缘、曲线、曲面、不变矩等。 1.2搜索空间 搜索空间指在配准过程中对图像进行变换的范围及变换方式。 变换范围分为三类:全局的、局部的和位移场的。全局变换是指整幅图像的空间变换都可以用相同变换参数表示。局部变换是指在图像的不同区域可以有不同的变换参数,(通常在区域的关键点位置上进行参数变换,其他位置进行插值处理)。位移场变换是指对图像中的每一像素点独立地进行参数变换,通常使用一个连续函数来实现优化和约束。 变换方式分为两种形式:线性变换和非线性变换。线性变换包括刚体变换(Rigid Body Transformation)、仿射变换(Affine Transformation)和投影变换(Projective Transformation)。非线性变换一般使用多项式函数,如二次,三次函数及薄板样条函数,指数函数等表示。 1.3相似性度量 相似性度量是衡量每次变换结果优劣的准则,用来对变换结果进行评估,为搜索策略提供下一步动作提供依据。通常配准算法的抗干扰能力是由特征提取与相似性度量共同决定的。 常用的相似性度量有:互信息、归一化互信息、联合熵、相关性、欧式距离、梯度互相关等。 1.4搜索策略 搜索策略指在搜索空间中找到最优配准参数的方法。 常用的搜索策略有:黄金分割法、Brent法、抛物线法、三次插值法、Powell法、遗传算法、蚁群算法、牛顿法、梯度下降法等。其他降低计算量的算法包括先粗配,后精配。
基于ICP算法的图像配准的MATLAB实现
function [TR, TT] = icp(model,data,max_iter,min_iter,fitting,thres,init_flag,tes_flag,refpn t) % ICP Iterative Closest Point Algorithm. Takes use of % Delaunay tesselation of points in model. % % Ordinary usage: % % [R, T] = icp(model,data) % % ICP fit points in data to the points in model. % Fit with respect to minimize the sum of square % errors with the closest model points and data points. % % INPUT: % % model - matrix with model points, [Pm_1 Pm_2 ... Pm_nmod] % data - matrix with data points, [Pd_1 Pd_2 ... Pd_ndat] % % OUTPUT: % % R - rotation matrix and % T - translation vector accordingly so % % newdata = R*data + T . % % newdata are transformed data points to fit model % % % Special usage: % % icp(model) or icp(model,tes_flag) % % ICP creates a Delaunay tessellation of points in % model and save it as global variable Tes. ICP also % saves two global variables ir and jc for tes_flag=1 (default) or % Tesind and Tesver for tes_flag=2, which % makes it easy to find in the tesselation. To use the global variables % in icp, put tes_flag to 0. % % % Other usage: % % [R, T] = icp(model,data,max_iter,min_iter,... % fitting,thres,init_flag,tes_flag) % % INPUT: % % max_iter - maximum number of iterations. Default=104 % % min_iter - minimum number of iterations. Default=4 % % fitting - =2 Fit with respect to minimize the sum of square errors. (default) % alt. =[2,w], where w is a weight vector corresponding to data. % w is a vector of same length as data.
图像配准算法综述
杭州电子科技大学 毕业设计(论文)文献综述 毕业设计题目SIFT特征研究及应用 文献综述题目图像配准算法综述学院生命信息及仪器工程学院 专业电子信息技术及仪器 姓名 班级 学号 指导教师
图像配准算法综述 一.前言 图像配准是指找出场景中同一物体表面的结构点在不同图像上的投影像素点之间的对应关系,是图像信息处理领域中一项非常重要的技术,同时也是其它一些图像分析技术,如立体视觉、运动分析、数据融合等的基础。 目前图像配准广泛应用于虚拟现实、视频压缩、图像复原、图像数据库检索等技术中。图像配准的研究是计算机视觉中最困难也是最重要的任务之一。不同的图像配准方法总是对应于某种适用的图像变换模型,其核心问题是提高配准的速度、精度和算法的稳健度。 随着科学技术的发展现在约40%的机器视觉应用中都会使用图像匹配技术,所涉及的领域有:工业检测,导弹的地形匹配,光学和雷达的图像跟踪,交通管理,工业流水线的自动监控、工业仪表的自动监控,医疗诊断,资源分析,气象预报,文字识别以及图像检索等。 图像匹配研究按其处理步骤可以分为样本采集、样本预处理、样本分割、样本的特征提取等,并且与计算机视觉、多维信号处理和数值计算方法等紧密结合。它也是其它一些图像分析技术,如立休视觉、运动分析、数据融合等的基础。正因为其应用的广泛性,新的应用和新的要求逐步产生,使得匹配算法的研究逐步走向深入,出现了快速、稳定、鲁棒性好的匹配算法。因此,研究图像的匹配算法对于如何提高实际工程中的图像处理质量和识别精度具有非常重要的意义。 本文主要分析图像匹配常用方法的优点和不足之处,讨论了图像匹配中需要进一步研究和解决的问题。 二.图像配准算法的研究现状 图像配准是立体视觉、运动分析、数掘融合等实用技术的基础,在导航、地图与地形配准、自然资源分析、天气预报、环境监测、生理病变研究等许多领域有重要的应用价值。国内外学者针对不同的图像配准应用问题进行了大量的研究工作,早在1992年英国剑桥大学的Lisa Gottesfeld Brown在文献[1]习中就总结了图像配准的主要理论及图像配准在各个领域的应用。当时他讨论的图像配准技术主要还是著眼于医学图像处理、遥感图像处理等传统应用领域。图像配准是图像镶嵌技术的核心问题。 微软研究院的Richard Szeliski在1996年SIGGRAPH上提出了基于运动模型的全景图拼接算法[7]。Szeliski采用了非线性优化的方法来最小化像素两幅图像的亮度差以确定变换参数。该方法使用了全部像素进行优化处理,所以配准精度较高,但是计算速度较慢,且稳健性不佳。 国内的赵向阳。杜立民在2004年提出了一种基于特征点匹配的图像自动拼接算法[2],其中使用了Harris算法[3]提取角点并进行匹配。赵的算法采用了鲁棒变换估计技术,在一定程度上提高配准算法的稳健性,但是计算速度依然较慢,且无法配准重
图像几何变换
图像几何变换 一、实验目的 (1)学习几种常见的图像几何变换,并通过实验体会几何变换的效果; (2)掌握图像平移、剪切、缩放、旋转、镜像、错切等几何变换的算法原理及编 程实现 (3)掌握matlab编程环境中基本的图像处理函数 (4)掌握图像的复合变换 二、涉及知识点 (1)图像几何变换不改变图像像素的值,只改变像素所在的几何位置 (2)图像裁剪imcrop函数,语法格式为: B=imcrop(A);交互式用鼠标选取区域进行剪切 B=imcrop(A,[left top right bottom]);针对指定的区域[left top right bottom]进行剪切 (3)图像缩放imresize函数,语法格式为: B = imresize(A,m,method) 这里参数method用于指定插值的方法,可选用的值为'nearest'(最邻近法),'bilinear'(双线性插值),'bicubic'(双三次插值),默认为'nearest'。 B = imresize(A,m,method)返回原图A的m倍放大的图像(m小于1时效果是 缩小)。 (4)图像旋转imrotate函数,语法格式为: B = imrot ate(A,angle,’crop’),参数crop用于指定裁剪旋转后超出图像的部分。
三、实验内容 (1)将图像hehua.bmp裁剪成200X200大小,并保存 (2)制作动画,将一幅图像逐渐向左上角平移移出图像区域,空白的地方用白色 填充 (3)利用剪切图像函数制作动画 (4)将图像分别放大1.5倍和缩小0.8倍,插值方法使用最近邻域法和双线性插值 法,对比显示图像。 (5)将图像水平镜像,再顺时针旋转45度,显示旋转后的图像。 (6)将图像分别进行水平方向30度错切,垂直方向45度错切,分别显示结果具体实现: 1.将图像hehua.bmp裁剪成200X200大小,并保存 I=imread('hehua.bmp'); n=size(I); figure; subplot(1,2,1); imshow(I); title('原图'); I=double(I); I1=zeros(200,200,n(3)); I1=I(1:200,1:200,1:n(3)); subplot(1,2,2);
基于特征的图像匹配算法-毕业论文含源代码
诚信声明 本人声明: 我所呈交的本科毕业设计论文是本人在导师指导下进行的研究工作及取得的研究成果。尽我所知,除了文中特别加以标注和致中所罗列的容以外,论文中不包含其他人已经发表或撰写过的研究成果。与我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的说明并表示了意。本人完全意识到本声明的法律结果由本人承担。 申请学位论文与资料若有不实之处,本人承担一切相关责任。 本人签名:日期:2010 年05 月20日
毕业设计(论文)任务书 设计(论文)题目: 学院:专业:班级: 学生指导教师(含职称):专业负责人: 1.设计(论文)的主要任务及目标 (1) 了解图象匹配技术的发展和应用情况,尤其是基于特征的图象匹配技术的发展和应用。 (2) 学习并掌握图像匹配方法,按要求完成算法 2.设计(论文)的基本要求和容 (1)查阅相关中、英文文献,完成5000汉字的与设计容有关的英文资料的翻译。(2)查阅15篇以上参考文献,其中至少5篇为外文文献,对目前国外图象匹配技术的发展和应用进行全面综述。 (3)学习图象匹配算法,尤其是基于特征的图象匹配算法。 (4)实现并分析至少两种基于特征的图象匹配算法,并分析算法性能。 3.主要参考文献 [1]谭磊, 桦, 薛彦斌.一种基于特征点的图像匹配算法[J].天津理工大学报,2006, 22(6),66-69. [2]甘进,王晓丹,权文.基于特征点的快速匹配算法[J].电光与控制,2009,16(2), 65-66. [3]王军,明柱.图像匹配算法的研究进展[J].大气与环境光学学报,2007,2(1), 12-15.
4
基于图像特征和光流场的非刚性图像配准
第25卷 第9期 2017年9月 光学精密工程 Optics and Precision Engineering Vol .25 No .9 Sep .2017 收稿日期:2017-03-06;修订日期:2017-05-28. 基金项目:国家自然科学基金资助项目(No .81671848,No .81371635);山东省重点研发计划资助项目(No : 2016GGX 101017)文章编号 1004-924X (2017)09-2469-14 基于图像特征和光流场的非刚性图像配准 纪慧中,贾大宇,董恩清*,薛 鹏,唐振超 (山东大学(威海)机电与信息工程学院,山东威海264200) 摘要:考虑传统非刚性图像配准方法无法同时满足配准精度和配准时间要求,综合图像的特征和灰度信息,提出了几种改进的非刚性图像配准方法:基于圆形描述子特征的非刚性配准方法(Circle Descriptor Feature ,CDF ),基于动态驱动力Demons 的非刚性配准方法(Dynamic Driving Force Demons ,DDFD ),和基于图像特征和光流场的非刚性配准方法。CDF 方法通过提取图像的特征点,采用圆形描述子代替传统方法的正方形描述子来保证图像的旋转不变性,提高配准 速度;DDFD 方法通过引入驱动力系数动态改变驱动力,有效地解决了传统方法配准时间和配准精度低的问题;基于图像特征和光流场的非刚性配准方法则首先提取浮动图像和参考图像的特征点,然后利用提取的特征点进行粗配准(特征级配准),再采用基于光流场的方法进行精细配准(像素级配准),最终实现配准精度和配准时间的兼顾。对checkboard 测试图像、自然图像、脑部M R 图像、肝部CT 图像进行了实验测试,结果表明,本文方法在配准时间、配准精度及对大形变图像的适应性方面均优于传统尺度不变特征转换(SIFT )、加速鲁棒特征(SURF )、Demons 、Active Demons 和全变差正则项-L 1范数项(T V -L 1)等方法。 关 键 词:图像配准;非刚性配准;特征提取;光流场模型;圆形描述子 中图分类号:T P 391.4 文献标识码:A doi :10.3788/OPE .20172509.2469Non -rigid registrations based on image characteristics and optical flows JI Hui -zhong ,JIA Da -y u ,DONG En -q ing *,XU E Peng ,T ANG Zhen -chao (School o f Mechanical ,Electrical &In f ormation En g ineering , Shandon g Universit y ,W eihai 264200,China ) *Corres p onding author ,E -mail :en q dong @sdu .edu .cn Abstract :As the non -rigid image registration methods can not meet the requirements of registration accuracy and registration time simultaneously ,three kinds of improved non -rigid registration methods are proposed based on image characteristics and image gray .T hese non -rigid registration methods were based on the Circle Descripto increases Feature (CDF ),Dynamic Driving Force Demons (DDFD )and image characteristics and optical flow ,respectively .In CDF method ,feature points were extracted from the images ,and the circle descriptor is used in the method instead of square descriptor in classical methods ,by w hich the rotation invariance was maintained and the speed of the registration was increased .In DDFD method ,the driving force was changed by introducing the driving force coefficient ,so that the registration time and registration accuracy were improved effectively .In registration methods based on image characteristics and optical flow ,the feature points were extracted 万方数据
关于图像匹配的综述
关于图像匹配的综述 1.图像匹配的背景及定义 1.1图像匹配的背景及意义 图像匹配技术广泛的应用于日常生活中的诸多领域,如医疗诊断中各种医学图片的分析与识别、遥感图片识别、天气预报中的卫星云图识别、指纹识别、人脸识别等。图像匹配技术主要指通过计算机,采用数学技术方法,对获取的图像按照特定目的进行相应的处理。图像匹配技术是人工智能的一个重要分支和应用,随着计算机技术及人工智能技术的发展,图像识别技术逐渐成为人工智能的基础技术之一。它涉及的技术领域相当的广泛,也越来越深入,其基本分析方法也随着数学工具的不断进步而不断发展。现在,图像识别技术的应用范围己经不仅仅局限于视觉的范围,也体现在机器智能和数字技术等方面。 1.2图像匹配的定义 所谓图像匹配是指在一幅(或一批)图像中寻找与给定目标图像相似的图像或者图像区域(子图像)的过程。通常将已知目标图像称为模板图像,而将待搜索图像中可能与它对应的子图称作该模板的待匹配的目标图像。图像匹配是在来自不同时间或者不同视角的同一场景的两幅或多幅图像之间寻找对应关系,该技术隶属于计算机视觉哺领域。图像匹配的具 体应用包括目标或场景识别、在多幅图像中求解3D结构、立体对应和运动跟踪等。由于拍摄时间、拍摄角度、自然环境的变化,多种传感器的使用、传感器本身的缺陷及噪声等影响,拍摄的图像会存在灰度失真和几何畸变。同时,图像预处理过程会引入的误差,这都是导致模板图像与待匹配的目标图像之间通常存在着一定程度上的差异。在这种情况下,如何使匹配算法精度高、正确匹配率高、速度快和抗干扰性强成为人们关心的问题。 2.图像匹配算法的分类 图像匹配算法的选取对图像匹配结果的影响很大。实用的匹配算法不仅要求计算量小,还必须具有良好的抗噪能力和抗几何形变的能力。通常情况下,图像匹配算法可以分为以下两大类:基于灰度相关的匹配算法、基于特征的图像匹配算法。 1) 基于灰度分布的相关匹配算法,也称为基于区域的匹配方法。常见的基于图像灰度的匹配方法有:(1)归一化灰度相关匹配、(2)最小二乘影像匹配、和(3)序贯相似性检测法匹配等。该类算法直接利用整幅图像的灰度信息,建立两幅图像之间的相似性度量,然后采用某种搜索方法,寻找使相似性度量值最大或最小的变换模型的参数值。在灰度及几何畸变