运动技能的学习与控制
《运动技能学习与控制》(一)
Unit One 动作技能和运动能力概述
Chapter One 动作机能的分类
人类的各种行为活动都可以统称为动作技能。
技能(skill):1.为实现特定目标而操作的动作或任务;2.以操作质量为表征。
运动技能(motor skill):指有特定操作目标,涉及自主身体或肢体运动的技能。
动作(action):由身体和/或肢体运动产生的指向目标的运动。
【疑】百度——身体:指人或动物的整个生理组织,有时特指驱干和四肢。既然身体包括四肢,关于动作的解释不就可以直接定义为由身体运动产生的指向目标的运动嘛。也许是翻译的问题,body和limb的意思还是不一样的,原因也许就在这吧。
运动(movement):构成动作或运动技能的肢体或肢体联合的行为特征。
一维分类系统
通常我们根据技能间的相似特征来对动作技能进行分类。最常见的方法是根据技能的共同特征将技能进行归类。每一种共同特征包含两个范畴(注意并非二元范畴),用一个连续区间的两端来表示。
【疑】两个范畴和二元范畴有何不同呢?
1.参与操作的技能肌肉系统的大小:大、小肌肉群
2.动作开始和结束的特征:连续动作技能--任意动作开始和结束;重复性活动
分立技能--指定动作开始和结束;单一性活动
3.环境背景的稳定性:开放性动作技能--支撑面、操作对象和/或操作中处于运动状态的其他人
封闭性动作技能--支撑面、操作对象和/或操作中处于静止状态的其他人
【疑】有绝对的封闭性动作技能吗?日常生活中绝大部分都是开放性动作技能。
大肌肉群动作技能(gross motor skill):指需要大肌肉系统参与工作才能实现操作目标的动作技能。
小肌肉群动作技能(fine motor skill):指需要小肌肉群参与动作控制才能实现操作目标的动作技能;包括手眼协调动作和高度精确性的手指、手腕动作。
分立动作技能(discrete motor skill):指具有明显开始和结束界限的运动技能,一般由简单动作构成。
连续动作技能(continuous motor skill):指没有明显开始和结束界限的运动技能,一般由重复性技能构成。
序列动作技能(serial motor skill):指由一系列分立动作构成的动作技能。
封闭性动作技能(closed motor skill):指操作环境稳定或者可以预知,操作者可以控制动作开始时间的动作技能。
开放性动作技能(open motor skill):指操作环境不稳定、无法预知,操纵对象或操作背景处于运动状态,并且动作开始时间由外界条件决定的运动技能。
分类法(taxonomy):根据事物构成元素间的特征关系而建立的分类系统。
调节条件(regulatory conditions):指决定(即调节)动作操作特征的环境背景。
尝试间变化(intertrial variability):金泰尔运动技能分类法中的一种环境特征,指在一种情景或一次练习中进行的技能操作中存在的调节条件,在下一操作情景或练习中出现或不出现的不确定性。
金泰尔的二维分类法
完全封闭性技能完全开放性技能
固定、无尝试间变化——固定、有尝试间变化——运动、无尝试间变化——运动、有尝试间变化
1.操作的环境背景特征
环境背景(固定调节条件、无尝试间变化;固定调节条件、存在尝试间变化;运动调节条件、无尝试间变化;运动调节条件、存在尝试间变化)
2.表征技能的动作功能
动作功能(身体稳定性--无操纵、操纵;身体移动--无操纵、操纵)
Chapter Two 运动操作的测量
略
Chapter Three 运动能力
能力(ability):指决定个体在特定技能操作中成功潜能的一般特征。
运动能力(motor ability):此假说认为,个体的多种运动能力高度相关,并且这些能力水平可以表征个体的某一种或全部的运动能力。
运动能力特异性假说(specificity of motor abilities hypothesis):此假说认为,个体的多种运动能力是相对独立的。
【疑】在没有看到运动能力特异性假说前,一直思考视动协调能力的问题,很多幼儿或少儿在运动初期经常会出现视动不协调的现象,所以我一直都觉得视觉和运动能力二者应该是有高度的联系,这种观点也正好符合一般运动能力假说(general motor ability hypothesis),认为尽管个体的运动能力有不同类型,但这些运动能力却高度相关,并且可以表现为一种单一的整体运动能力,并且这种整体运动能力的水平将影响个体操作任何运动技能的最终结果。另外,在大学时候我也经常跟同学说,某某同学的该项术科技评考试不会有问题的,因为他的协调性很好,掌握该项运动技能的难度不会太大,这个说法其实也是该观点的思想。今天学习了运动能力特异性假说理论后,发现自己原先的观点还真需要颠覆一下,举个例子来说,参加特奥会的盲人跳远运动员,视动能力存在极大的不平衡性,但是依然能表现出极高的运动能力,这个例子很浅显的就验证了个体的多种运动能力确实是相对独立的。我们不能因为一个人显示出高水平的跳跃能力,就主观臆断出其具有很强的瞄准能力等等。
运动技能的学习
第四章运动技能的学习 1、什么是运动技能可以分为哪些类别 2、人们是如何从一窍不通到熟练掌握某一运动技能的 3、为什么掌握某些运动技能会促进或阻碍另一种运动技能的学习用哪些方法可使运动技能的学习之间发生促进作用呢 本章学习要点: 1、运动技能的概念、与心智技能的关系和分类 2、学习的概念、运动技能学习的阶段、运动技能形成的特点以及运动技能形成的途径——练习 3、运动技能迁移的含义、种类、迁移产生的原因以及促进运动技能迁移的方法 第一节运动技能概述 一、运动技能的概念 技能是通过练习获得的,顺利完成某种任务的动作或心智活动方式。按照技能本身的性质和特点,可分为动作技能和心智技能两种。动作技能是指通过练习而形成的一定的动作活动方式,如写字、游泳、修理自行车、安装收音机,都是复杂程度不同的动作技能,它是人类生活中不可或缺的重要组成部分,涉及人们日常生活、学习活动、生产劳动和体育活动中的各类动作操作;而心智技能则是在头脑中进行的某些心智活动方式,如以记忆、思维、想象等心理活动背出数学公式,进行公式运算、逻辑推理等。 运动技能是动作技能的一种,是通过练习获得的,为完成体育运动活动的特定任务而将种种动作活动方式顺利表现出来的能力。运动技能主要是借助于神经系统和骨骼肌肉系统实现的。如打高尔夫球主要体现为对球和杆的操作,跳远则主要体现为外显的肌肉反应。 运动技能具有三个特征: 1、具有一定的任务目标,运动技能总是指向一定的操作目标。 2、运动技能是自主运动,受人的主观意识支配。 3、运动技能需要身体、头或肢体的运动来实现任务目标,这是运动技能区别于人类其他技能的基础。 二、运动技能与心智技能的关系 运动技能与心智技能既有联系,又有区别。感知、记忆、思维、想象等认知活动是运动技能的调节者和必要组成部分,而外部动作是心智技能的最初依据和经常体现者。在完成比较复杂的活动时,人总是手脑并用,既需要运动技能,也需要心智技能,例如在体育比赛中要想获胜,除了动作技术要熟练,还需要一定战术的配合。 运动技能主要表现为外显的骨骼肌的操作活动,而心智技能主要表现为内隐的思维操作活动。两者最主要的区分在于活动中哪种技能占主导成分。如笔算主要是头脑中的“心算”,用手加以记录,所以属于心智技能;体操运动主要是骨骼肌的活动,也需要头脑中进行一定的想象活动,所以属于运动技能。 三、运动技能的种类 运动技能依不同的分类标准,可分为连续技能和非连续技能、封闭技能和开放技能、小肌肉群技能和大肌肉群技能、低策略性技能和高策略性技能等。 1、连续技能和非连续技能
用平面二连杆机器人为例贯穿运动学、雅可比、动力学、轨迹规划甚至控制与编程分析
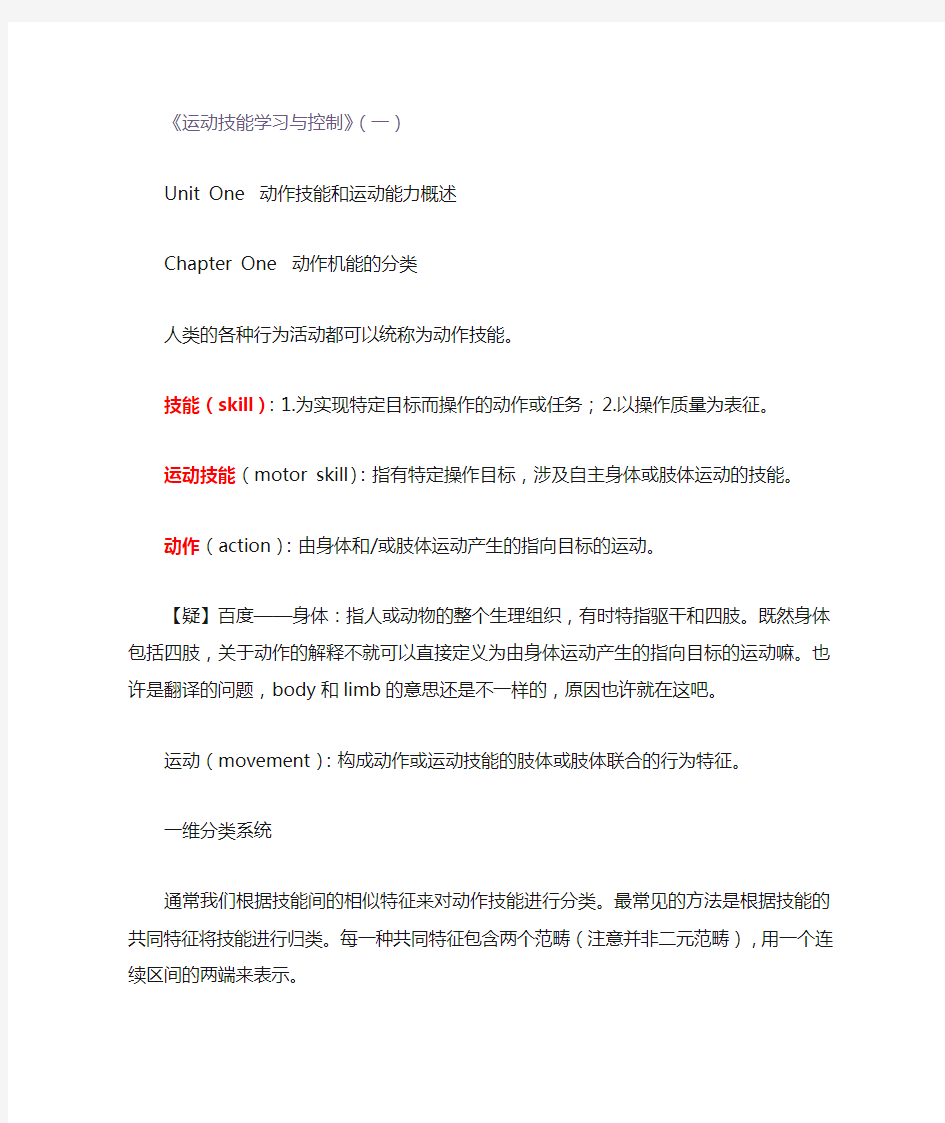
一、平面二连杆机器人手臂运动学 平面二连杆机械手臂如图1所示,连杆1长度1l ,连杆2长度2l 。建立如图1所示的坐标系,其中,),(00y x 为基础坐标系,固定在基座上,),(11y x 、),(22y x 为连体坐标系,分别固结在连杆1和连杆2上并随它们一起运动。关节角顺时针为负逆时针为正。 图1平面双连杆机器人示意图 1、用简单的平面几何关系建立运动学方程 连杆2末段与中线交点处一点P 在基础坐标系中的位置坐标: ) sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p (1) 2、用D-H 方法建立运动学方程 假定0z 、1z 、2z 垂直于纸面向里。从),,(000z y x 到),,(111z y x 的齐次旋转变换矩阵为: ?? ??? ???????-=100 010000cos sin 00sin cos 1 111 01θθ θθT (2) 从),,(111z y x 到),,(222z y x 的齐次旋转变换矩阵为: ?? ??? ???????-=100 010000cos sin 0sin cos 2 212212 θθ θθl T (3) 从),,(000z y x 到),,(222z y x 的齐次旋转变换矩阵为:
? ???? ???????+++-+=?? ??? ? ? ?? ???-?????????????-=?=10000100sin 0)cos()sin(cos 0)sin()cos( 1000010 000cos sin 0sin cos 1000 010000cos sin 00sin cos 1121211121212212 2111 1120102θθθθθθθθθθθθθθθθ θθl l l T T T (4) 那么,连杆2末段与中线交点处一点P 在基础坐标系中的位置矢量为: ? ?? ? ? ???????=????????????++++=? ? ? ?? ? ?????????????? ?? ???+++-+=?=110)sin(sin )cos( cos 10010000100sin 0)cos()sin(cos 0)sin()cos( 212112121121121211121212 020p p p z y x l l l l l l l P T P θθθθθθθθθθθθθθθθ (5) 即, ) sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p (6) 与用简单的平面几何关系建立运动学方程(1)相同。 建立以上运动学方程后,若已知个连杆的关节角21θθ、,就可以用运动学方程求出机械手臂末端位置坐标,这可以用于运动学仿真。 3、平面二连杆机器人手臂逆运动学 建立以上运动学方程后,若已知个机械臂的末端位置,可以用运动学方程求出机械手臂二连杆的关节角21θθ、,这叫机械臂的逆运动学。逆运动学可以用于对机械臂关节角和末端位置的控制。对于本例中平面二连杆机械臂,其逆运动学方程的建立就是已知末端位置 ),(p p y x 求相应关节角21θθ、的过程。推倒如下。 (1)问题 ) sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p 已知末端位置坐标),(p p y x ,求关节角21θθ、。 (2)求1θ
最新运动技能学习与控制(作业)word版本
第一章 1.简述运动技能的四个特征 (1)指向目标,即动作技能都有操作目标; (2)动作技能的操作具有随意性; (3)动作技能需要身体、头、和/或肢体的运动来实现任务目标;(4)为了实现技能的操作目标,需要对动作技能进行学习或再学习; 2.在金泰尔的分类法中,动作技能分类的两个纬度分别是什么? (1)操作的环境背景特征:①调节条件 ②尝试间变化 (2)表征技能的动作功能:①身体定向 ②操纵 3.在金泰尔的分类系统中调节条件是指什么? 调节条件是指技能操作中必然存在并影响操作者运动特征的环境背景。
第二章 1.什么是操作结果测量、操作过程测量?两者的差异?根据两者测量的方法举出三至四个运动教学中运动技能测量的例子。 (1)操作结果测量:指为了说明动作技能操作结果而进行测量。(2)操作过程测量:为了说明在动作操作过程中运动控制系统某些方面的操作状态而进行的一种动作技能操作测量。 差异: ①操作结果测量没有提供产生操作结果前肢体或身体行为的任何信息; ②没有关于运动过程中参与工作的肌肉系统的活动信息; 举例: 操作结果测量:①一英里跑或打一个字所用的时间; ②从发令枪响到起跑动作开始的时间; ③垂直纵跳的高度;
操作过程测量:①动作过程中肢体经过的高度; ②动作过程中肢体运动速度; ③运动中加速或减速的模式; 2.简述简单反应时、选择反应时和辨别反应时及区别。(1)简单反应时:指测试情景中只包含单一刺激并要求被试者做出单一反应动作,这时所测的反应时称为简单反应时。 (2)选择反应时:指测试情景中包含两个或两个以上的信号,每个信号需要特定的反应形式,这时测得的反应时为选择反应时。 (3)辨别反应时:指测试情景中包含两个或两个以上的信号,但被试者只需对其中的一个做出反应,对其他信号不做反应,这时测得的反应时为辨别反应时。 区别:①从刺激信号的数量来判断是不是简单反应 时;②从做出的反应的信号数量来判断是不是辨别反应时。 3.将反应时分段的含义是什么?
运动技能学习与控制(作业),DOC
1.简述运动技能的四个特征 指向目标,即动作技能都有操作目标; 动作技能的操作具有随意性; 动作技能需要身体、头、和/或肢体的运动来实现任务目标; 为了实现技能的操作目标,需要对动作技能进行学习或再学习;在金泰尔的分类法中,动作技能分类的两个纬度分别是什么 操作的环境背景特征:①调节条件 ②尝试间变化 表征技能的动作功能:①身体定向 ②操纵 在金泰尔的分类系统中调节条件是指什么 调节条件是指技能操作中必然存在并影响操作者运动特征的环境背景。 第二章 什么是操作结果测量、操作过程测量两者的差异根据两者测量的方法举出三至四个运动教学中运动技能 测量的例子。 操作结果测量:指为了说明动作技能操作结果而进行测量。 操作过程测量:为了说明在动作操作过程中运动控制系统某些方面的操作状态而进行的一种动作技能操作测量。
①操作结果测量没有提供产生操作结果前肢体或身体行为的任 何信息; ②没有关于运动过程中参与工作的肌肉系统的活动信息; 举例: 操作结果测量:①一英里跑或打一个字所用的时间; ②从发令枪响到起跑动作开始的时间; ③垂直纵跳的高度; 操作过程测量:①动作过程中肢体经过的高度; ②动作过程中肢体运动速度; ③运动中加速或减速的模式; 2.简述简单反应时、选择反应时和辨别反应时及区别。(1)简单反应时:指测试情景中只包含单一刺激并要求被试者做出单一反应动作,这时所测的反应时称为简单反应时。 (2)选择反应时:指测试情景中包含两个或两个以上的信号,每个信号需要特定的反应形式,这时测得的反应时为选择反应时。 (3)辨别反应时:指测试情景中包含两个或两个以上的信号,但被试者只需对其中的一个做出反应,对其他信号不做反应,这时测得的反应时为辨别反应时。 区别:①从刺激信号的数量来判断是不是简单反应 时;②从做出的反应的信号数量来判断是不是辨别反应时。
运动技能的学习与控制知识分享
运动技能的学习与控 制
《运动技能学习与控制》(一) Unit One 动作技能和运动能力概述 Chapter One 动作机能的分类 人类的各种行为活动都可以统称为动作技能。 技能(skill):1.为实现特定目标而操作的动作或任务;2.以操作质量为表征。运动技能(motor skill):指有特定操作目标,涉及自主身体或肢体运动的技能。 动作(action):由身体和/或肢体运动产生的指向目标的运动。 【疑】百度——身体:指人或动物的整个生理组织,有时特指驱干和四肢。既然身体包括四肢,关于动作的解释不就可以直接定义为由身体运动产生的指向目标的运动嘛。也许是翻译的问题,body和limb的意思还是不一样的,原因也许就在这吧。 运动(movement):构成动作或运动技能的肢体或肢体联合的行为特征。 一维分类系统 通常我们根据技能间的相似特征来对动作技能进行分类。最常见的方法是根据技能的共同特征将技能进行归类。每一种共同特征包含两个范畴(注意并非二元范畴),用一个连续区间的两端来表示。 【疑】两个范畴和二元范畴有何不同呢? 1.参与操作的技能肌肉系统的大小:大、小肌肉群 2.动作开始和结束的特征:连续动作技能--任意动作开始和结束;重复性活动
分立技能--指定动作开始和结束;单一性活动 3.环境背景的稳定性:开放性动作技能--支撑面、操作对象和/或操作中处于运动状态的其他人 封闭性动作技能--支撑面、操作对象和/或操作中处于静止状态的其他人 【疑】有绝对的封闭性动作技能吗?日常生活中绝大部分都是开放性动作技能。 大肌肉群动作技能(gross motor skill):指需要大肌肉系统参与工作才能实现操作目标的动作技能。 小肌肉群动作技能(fine motor skill):指需要小肌肉群参与动作控制才能实现操作目标的动作技能;包括手眼协调动作和高度精确性的手指、手腕动作。 分立动作技能(discrete motor skill):指具有明显开始和结束界限的运动技能,一般由简单动作构成。 连续动作技能(continuous motor skill):指没有明显开始和结束界限的运动技能,一般由重复性技能构成。 序列动作技能(serial motor skill):指由一系列分立动作构成的动作技能。 封闭性动作技能(closed motor skill):指操作环境稳定或者可以预知,操作者可以控制动作开始时间的动作技能。 开放性动作技能(open motor skill):指操作环境不稳定、无法预知,操纵对象或操作背景处于运动状态,并且动作开始时间由外界条件决定的运动技能。 分类法(taxonomy):根据事物构成元素间的特征关系而建立的分类系统。
两轮差速机器人运动学分析和控制研究
两轮差速机器人运动学分析和控制研究 作者:王维新 来源:《现代电子技术》2012年第10期 摘要:对两轮差速机器人的运动控制进行分析,建立了输入/输出量之间的函数隶属关系,在建立轮式机器人的运动学模型和动力学模型基础上,为实际研究提供可行性指导和理论依据。同时为博创平台的差速机器人运动控制提出新的思路,即基于模糊控制的机器人路径跟踪。将增量式PID控制算法及模糊控制策略结合起来,应用于两轮差速机器人的运动控制模型中,并运用Matlab进行仿真,得到了控制系统的响应曲线,达到了满意的效果。 关键词:差速机器人;模糊控制; Matlab仿真;增量式PID控制 中图分类号:文献标识码:A 文章编号: (Department of Machinery and Electron Engineering, Xi’an University of Arts and Science, Xi’an 710065, China) Abstract: The motion control of the two wheel differential robot is analyzed. The function affiliation between the input and output quantities is established. The establishment of the kinematics model and dynamics model of wheeled robot provided the feasibility guidance and theoretical basis for practical research. A new way based on path tracking of the fuzzy control robot is put forward for the motion control of differential robot on Bogen platform. The combination of the incremental PID differential robot. The response curve of the control system was obtained by simulation with Matlab and a satisfactory result was achieved. Keywords: differential robot; fuzzy control; Matlab simulation; incremental PID control -------------------------------------------------------------------------------- 收稿日期: 基金项目:西安市科技计划项目(CXY1134WL39)随着高技术的发展,机器人技术的应用领域不断扩大,工业机器人、特种作业机器人、服务机器人、微小型机器人等已经在各个方面得到广泛的应用和发展。两轮差速机器人涉及到多个应用领域,对两轮差速机器人的运动控制研究成为主要的课题。
运动技能的学习
第四章运动技能的学习 1、什么是运动技能?可以分为哪些类别? 2、人们是如何从一窍不通到熟练掌握某一运动技能的? 3、为什么掌握某些运动技能会促进或阻碍另一种运动技能的学习?用哪些方法可使运动技能的学习之间发生促进作用呢? 本章学习要点: 1、运动技能的概念、与心智技能的关系和分类 2、学习的概念、运动技能学习的阶段、运动技能形成的特点以及运动技能形成的途径——练习 3、运动技能迁移的含义、种类、迁移产生的原因以及促进运动技能迁移的方法 第一节运动技能概述 一、运动技能的概念 技能是通过练习获得的,顺利完成某种任务的动作或心智活动方式。按照技能本身的性质和特点,可分为动作技能和心智技能两种。动作技能是指通过练习而形成的一定的动作活动方式,如写字、游泳、修理自行车、安装收音机,都是复杂程度不同的动作技能,它是人类生活中不可或缺的重要组成部分,涉及人们日常生活、学习活动、生产劳动和体育活动中的各类动作操作;而心智技能则是在头脑中进行的某些心智活动方式,如以记忆、思维、想象等心理活动背出数学公式,进行公式运算、逻辑推理等。 运动技能是动作技能的一种,是通过练习获得的,为完成体育运动活动的特定任务而将种种动作活动方式顺利表现出来的能力。运动技能主要是借助于神经系统和骨骼肌肉系统实现的。如打高尔夫球主要体现为对球和杆的操作,跳远则主要体现为外显的肌肉反应。 运动技能具有三个特征: 1、具有一定的任务目标,运动技能总是指向一定的操作目标。 2、运动技能是自主运动,受人的主观意识支配。 3、运动技能需要身体、头或肢体的运动来实现任务目标,这是运动技能区别于人类其他技能的基础。 二、运动技能与心智技能的关系 运动技能与心智技能既有联系,又有区别。感知、记忆、思维、想象等认知活动是运动技能的调节者和必要组成部分,而外部动作是心智技能的最初依据和经常体现者。在完成比较复杂的活动时,人总是手脑并用,既需要运动技能,也需要心智技能,例如在体育比赛中要想获胜,除了动作技术要熟练,还需要一定战术的配合。 运动技能主要表现为外显的骨骼肌的操作活动,而心智技能主要表现为内隐的思维操作活动。两者最主要的区分在于活动中哪种技能占主导成分。如笔算主要是头脑中的“心算”,用手加以记录,所以属于心智技能;体操运动主要是骨骼肌的活动,也需要头脑中进行一定的想象活动,所以属于运动技能。 三、运动技能的种类 运动技能依不同的分类标准,可分为连续技能和非连续技能、封闭技能和开放技能、小肌肉群技能和大肌肉群技能、低策略性技能和高策略性技能等。
工业机器人机械系统运动学及运动控制研究
工业机器人机械系统运动学及运动控制研究 发表时间:2020-03-19T02:12:32.359Z 来源:《科技新时代》2019年12期作者:马艳飞刘长军 [导读] 机器人运动学的分布步骤及内容包括:第一,机器人连杆参数及其D-H坐标变换;第二,机器人运动学方程;第三,机器人逆运动学。 沈阳工业大学辽宁沈阳 111000 摘要:为了有效促进工业机器人运动控制系统的优化和改进,以期为机器人的的智能化、自动化发展提供技术支撑,本文针对工业机器人机械系统运动学及运动控制进行了研究。首先,对机器人的构成及工作原理。其次,研究了工业机器人机械系统运动学。最后,研究了工业机器人机械系统运动控制策略。 关键词:工业机器人;机械系统运动学;运动控制 虽然我国对工业机器人的研究在不断进步,但是与其它发达国家相比仍比较落后。尤其是我国还未掌握更多的核心技术。对此,国家也出台了一系列的政策、措施支持我国工业机器人的研究。就2019年来说,人本轴承助力2019中国机器人产业发展大会、2019人工智能产业共同体青岛会议等会议的召开就预示着我国工业机器人的研究也在不断深入。而工业机械运动学及运动控制属于研究工业机器人的核心内容。所以,为了推动我国工业机器人行业的发展,研究人员还需继续研究工业机械运动学及运动控制。本文重点对工业机器人机械运动学及其控制策略再次进行了剖析,并就其应用进行了阐述。 一、机器人构成及其工作原理 具体来说,工业机器人分为操作机、末端执行器、传感系统、控制器四个部分。其中操作机的主要功能是控制手腕工作范围,使末端执行器执行相关操作。末端执行器的主要功能就是执行具体任务。传感器系统的主要功能是利用视觉、触觉等传感器感知外界境况,并完成指定任务。一般情况下,工业机器人所用传感器的精度非常高。控制器的主要作用是进行系统控制。 另外,若是从动力源角度入手,还可将工业机器人驱动系统分为液压驱动、气动驱动、电动驱动、复合式驱动等系统。在具体选择中,技术人员需从作业环境、控制功能、功耗等方面入手,选择性价比比较高的应用系统。只有这样才能保障驱动系统的使用性能。 二、工业机器人机械运动学 1.机器人运动学分析步骤及内容 机器人运动学的分布步骤及内容包括:第一,机器人连杆参数及其D-H坐标变换;第二,机器人运动学方程;第三,机器人逆运动学。 首先,机器人连杆参数及其D-H坐标变换。其中连杆参数主要包括尺寸参数、相邻连杆的关系参数及关节变量。尺寸参数还可分为连杆长度、连杆扭角。连杆长度是指两个顺次关节轴线沿共垂线的距离,连杆扭角是指两个顺次关节轴线的夹角;关系参数还可分为连杆偏置、关节转角,连杆偏置是指沿某一关节轴线方向,两个共垂线之间的距离。关节转角是指的在垂直于关节轴线的平面内的两个共垂线的夹角;关节变量包括旋转关节变量、移动关节变量。旋转关节的变量是关节转角,同时连杆长度、连杆扭角、连杆偏置是固定的。在移动关节中,连杆偏置是关节变量,连杆长度、连杆扭角、关节转角则是固定的。另外,若想实现D-H坐标变换,就要先建立移动连杆坐标系,然后结合移动连杆参数,就可以确定连杆i相对于i-1的位姿,即D-H坐标变换矩阵。通常情况下,依据关节转角θ、连杆长度a、连杆扭角α、连杆偏置d的顺序以此进行变换。在这一过程中需要注意虽然移动连杆坐标系的建立是以连杆偏置变量为基础的,而旋转坐标系的建立是以关节变量为基础的,但是移动连杆的D-H变换矩阵求解方法与转动连杆坐标系求解方法相同。 其次,运动学方程。以由手爪相对于基座的两种位姿表示得来的运动学方程为例,其基本表现形式为右边则是连杆矩阵的乘积。可以说,这是作为典型的方程表示方法。 最后,机器人逆运动学。工业机器人机械运动学中的逆向运动学是以DH法为基础的,主要是在已知机器人手位姿的情况下,计算所有连杆长度和关节角度。简单的说,是进行运动学的逆解。所以,要利用坐标系的变换矩阵进行逆向运动方程的求解。但是在这一过程中,还需对基坐标系进行分析,建立与机械手控制系统响应的运动学模型,并选择合适的求解方法。常见解法有封闭解法、数值解法。其中封
教育学原理》作业及答案
《教育学》作业 一、填空题 1. 从广义上说,凡是增进人的知识和技能、影响人们思想品德的活动,都是教育。 2. 学校教育内容具体表现为课程。 3. 教育自身直接具有的功能,或教育自身的职责和能力一般叫教育的本体功能。 4. 在教学中,教师运用实物、模型或形象化语言进行教学,使学生获得生动形象,并在此基础上进行思考, 掌握知识本质的教学原则是直观性原则。 5. 课的组成部分和各部分进行的顺序及其时间的分配,一般叫课的结构。 6. 教师遵循教学规律,针对教学对象,灵活运用教法,善于启发诱导,激励学生热情,创造性地组织教学 过程,实现教学任务,从而取得最佳教学效果的一整套教学技巧,一般叫教学艺术。 7. 用系统的科学知识和技能武装学生、发展学生智力的教育就是____智育____。 8. 分别从各门科学中选择部分内容,组成各种不同的学科,彼此独立的安排它们的顺序、学习时数和期限, 这种课程就是______学科课程______。 9. 以全面提高学生的思想品德、科学文化和身体、心理、操作技能等素质,培养能力、发展个性为目的的基础教育也叫____素质______教育。 10. 教学既要面向全体学生,提出统一要求,又要根据学生的个别差异区别对待,促进每个学生在自己的原有基础上有所进步。这条教学原则是___因材施教_____原则。 11. 在一定的教学思想或教学理论指导下,为实现预定的教学目标而设计或发展起来的相对稳定的教学流程及其方法体系,就是_____教学模式_____。 12. 以教学目标为依据,制定科学的评价标准,运用科学的评价技术和手段,对教学活动过程及其结果进行测定、衡量、分析、比较,并给以价值判断的一种活动,就是___教学评价______。 13. 体育是向学生传授体育、___卫生____知识和技能,发展学生的机体素质,增强学生体质和运动能力,培养良好的体育道德和意志品质的教育。 14. 国家根据一定的教育目的和培养目标制定的有关学校教育和教学工作的指导性文件就是_课程计划 ______。 15. 以培养学生创新意识、创新能力、创新个性等创新素质为目的的教育就是__创新____教育。 16. 按照一定数量将年龄、文化程度相近的学生编成班组,由教师按教学计划规定的课程内容、教学时数和教学进度表(课表),进行分科式集体教学的一种教学形式就是__班级__教学。 17. 师生在教学过程中为了完成教学任务、实现教学目的所采用的一系列具体方式和手段,统称为___教学方法__。 18. 在教育研究中,表示研究方法、资料、结论的可靠程度的指标是__信度____。 二、单项选择题 1. 构成教育活动必不可少的最基本的因素是 ( D ) A.一般因素 B.基本因素 C.组成因素 D.构成要素 2. 狭义的课程一般是指学校根据教育目标选择的教育内容及其 (C ) A.传授方法 B.传授手段 C.传授进程 D.传授技术 3. 中小学为实现教育目标,与课堂教学相配合,在课堂教学以外对学生身心实施多种影响的正规教育活动, 就是 ( C ) A.课堂作业 B.课外作业 C课外活动 D.课外参观
运动技能学原理作业word精品
1. 运动技能是如何发生的 运动技能的基本概念运动技能是指人体在运动中掌握和有效地完成专门动作的能力。这种能力包括大脑皮质主导下的不同肌肉间的协调性。换言之,运动技能也就是指在准确的时间和空间里大脑精确支配肌肉收缩的能力。这需要用精确的力量和速度依一定的次序和时间去完成所需要的动作。运动技能的发展和提高,有赖于人们对人体机能客观规律的深刻认识和自觉运用。 运动技能的形成运动技能的形成,是由简单到复杂的建立过程,并有其建立、形成、巩固和发展的阶段性变化和生理规律。只是每一阶段的长短,随动作的复杂程度而不同.一般说来,可划分为相互联系的三个阶段或称三个过程。 一、泛化过程 学习任何一个动作的初期,通过教师的讲解和示范以及自己的运动实践,只能获得一种感性认识,对运动的技能的内在规律并不完全理解.由于人体内外界的刺激,通过感受器(特别是本体感觉)传到大脑皮质,引起大脑皮质细胞强烈兴奋,另外因为皮质内抑制尚未确立,所以大脑皮质中的兴奋与抑制都呈现扩散状态,使条件反射暂时联系不稳定,出现泛化现象.这个过程表现在肌肉的外表活动往往是动作僵硬,不协调,不该收缩的肌肉收缩,出现多余的动作,而且做动作很费力。这些现象是大脑皮质细胞兴奋扩散的结果。在此过程,教师应该抓住动作的主要环节和学生掌握动作中存在的主要问题进行教学,不应过多强调动作细节,而应以正确的示范和简练的讲解帮助学生掌握动作。 二、分化过程在不断的练习过程中,初学者对该运动技能的内在规律有了初步的理解,一些不协调和多余的动作也逐渐消除。此时,大脑皮质运动中枢兴奋和抑制过程逐渐集中,由于抑制过程加强,特别是分化抑制得到发展。大脑皮质的活动由泛化阶段进入了分化阶段,因此练习过程中的大部分错误动作得到纠正,能比较顺利地、连贯地完成完整动作技术。这是初步建立了动力定型。但定型尚不巩固,遇到新异刺激(如有外人参观或比赛),多余动作和错误动作可能重新出现。在此过程中,教师应特别注意错误动作的纠正,让学生体会动作的细节,促进分化抑制进一步发展,使动作日趋准确。 三、巩固过程通过进一步反复练习,运动条件反射系统已经巩固,达到建立巩固的动力定型阶段,大脑皮质的兴奋和抑制在时间和空间上更加集中和精确.此时,不仅动作准确、优美,而且某些环 节的动作还可出现自动化,即不必有意识去控制而能做出动作来。在环境条件变化时,动作技术也不易受破坏,同时由于内脏器官的活动与动作配合得很好,完成练习时也感到省力和轻松自如。形成运动技能的三个过程是相互联系的,各过程之间并没有明显的界限。训练水平高的运动员在学习掌握新动作时,泛化过程很短,对动作的精细分化能力强.形成运动技能快。运动新手在学习新动作时,泛化过程较长,分化能力较差,掌握动作较慢。动作越复杂,泛化过程就越明显,分化的难度也就越大,形成运动技能所需要的时间就越大。 但是,动力定型发展到了巩固过程,也并不是可以一劳永逸了。一方面,还可在继续练习巩固的情况下精益求精,不断提高动作质量,使动力定型更加完善和巩固;另一方面,如果不再进行练习,巩固了的动力定型还会消退,技术愈复杂,难度愈大,消退得也愈快。在此过程中,教师应对学生提出进一步要求,并指导学生进行技术理论学习,更有利于动力定型的巩固和动作质量的提高,促使动作达到自动化程度。 四、动作自动化 动作自动化:随着运动技能的巩固和发展,暂时联系达到非常巩固的程度以后,动作即可出现自动化现象,所谓自动化,就是练习某一套动作时,可以在无意识的条件下完成。其特征是,对整个动作或者是对动作的某些环节,暂时变为无意识的,例如,走路是人类自动化的
S71200运动控制学习资料全
S71200调试经验: 前一段时间用了S71200,调试的过程中也出现过一些问题,特别是运动控制,而且网上这类资料很少,好在经过努力终于解决,想到各位朋友可能会需要,现将经验总结如下: 由于IO控制与200都差不多,1200的运动控制分以下步骤: 一:组态: 在PLC—工艺对象—组态 组态:就是设置运动控制的相关参数,比如选择那一个口(要在设备配置中选择启用)和什么指令方式(PTO/PWM),
先上面添加新对象,选择轴, 然后进入到组态页面,选择相应参数,基本参数中只需要选一个PTO控制对象,也就是上面创建的运动控制对象,
扩展参数中:启用输出栏必须填写,就是电机伺服ON接的输出点,如果是两个轴必须用两个点,不能共用,也不用在程序中对伺服ON做任何处理了,当你程序中执行MC-POWER时伺服电机就会ON了, 如图所述内容,
限位的选择是要注意高电平和低电平,如果设错了会导致伺服不能动;动态就是加减速和最高速度不用我多说了吧, 回原点,主要是选择原点信号输入点,逼近方向及参考点开关,逼近方向很好理解,参考点开关,原则上是在减速运动的前方,这个是试出来的,我也说不太明白, 以上设置后,组态完成了,接下来要在程序中编写控控制程序了,
这个必须写,不然电机不能得电, RESET也很有用,在电机撞到限位了,要先按一下复位才能向反方向运动,与其它的不一样,要注意
回原点,走绝对位置是必须要先回一下原点的,走相对位置是不用回原点,回原点方式,用四种,3和4用组态里的方式回原点,都可以,我只用过3,4没用过, 用来显示轴当前位置
运动技能学
运动技能学 一、名词解释 1、运动技能:有特定操作目标,涉及自主身体或肢体运动的技能。 2、技能:经过练习二获得的完成某种任务的动作方式或心智活动方式。 3、有限容量理论(中心资源理论):人们完成各种活动时所需要的注意资 源都源于同一个中心源。 4、心里不应期:对非常接近的两个刺激的第二个刺激的应答的延迟现象。 (PRP)这是技能操作中的一个重要现象。 5、倒U原则:应激或激活,指的是有压力多引起的激动水平。 6、学习:由练习或经历而引起的,相对持久的技能绩效的变化。 7、绩效:在特定的时间和情景下某项技能的执行水平。 8、言语指导:简短、精炼的短语,可以将操作的注意引向重要的环境线 索,或者提醒操作者关键的技术动作。 9、内隐学习:无意识地获取有关环境变化规律知识的过程,同时,学习者 无法用语言将所获得的知识表达出来。 10、过度练习:超过实现特定操作标准所需练习量以外的附加练习。 11、分解练习:将某运动技能分成若干个环节或部分后分别进行练习。 12、整体练习:从技能的开始到结束完整地进行练习。 13、个体差异:是人们在完成某些任务中表现出来的稳定的持久差异。 14、能力:指个体所具有的遗传的、相对持久的、稳定的特质,存在于各种 运动和认知技能中。
结果反馈(KR):提供与操作结果,或是否达到运动目标有关的信息。 15、绩效反馈(KP);提供与操作过程(运动特征)相关信息。 二、简答、论述、分析 1、高水平的运动技能表现: (1)较短的动作时间 (2)较高的准确率和成功率 (3)较少的体能和心理能量消耗。 2、运动技能的三种成份: (1)姿势成分:为动作提供支持平台 (2)身体的移动成分:是身体和肢体移动到动作位置 (3)操作成分:产生动作。 3、技能的分类: (1)开放性运动技能与闭锁性运动技能 (2)连续性运动技能、非连续性运动技能 (3)小肌肉群运动技能和大肌肉群运动和技能。 4、反应的种类: (1)简单反应和复杂反应 (2)辨别反应和选择反应 5、人的信息加工系统: 信息输入→人脑对信息的储存和分析→信息输出
用平面三连杆机器人为例贯穿运动学、雅可比、动力学、轨迹规划甚至控制与编程
. 一、平面二连杆机器人手臂运动学 平面二连杆机械手臂如图1所示,连杆1长度1l ,连杆2长度2l ,连杆3长度为3l 。建立如图1所示的坐标系,其中,),(00y x 为基础坐标系,固定在基座上,),(11y x 、),(22y x 、 33(,)x y 为连体坐标系,分别固结在连杆1、连杆2、连杆3上并随它们一起运动。关节角顺 时针为负逆时针为正。 1 θ 图1平面双连杆机器人示意图 1、用简单的平面几何关系建立运动学方程 连杆2末段与中线交点处一点P 在基础坐标系中的位置坐标: 112123123112123123cos cos()+cos()sin sin()+sin() p p x l l l y l l l θθθθθθθθθθθθ=++++=++++ (1) 2、用D-H 方法建立运动学方程 假定0z 、1z 、2z 垂直于纸面向外。从),,(000z y x 到),,(111z y x 的齐次旋转变换矩阵为:
. ?? ??? ???????-=100 010000cos sin 00sin cos 1 11101θθ θθT (2) 从),,(111z y x 到),,(222z y x 的齐次旋转变换矩阵为: ?? ??? ???????-=100 010000cos sin 0sin cos 2 212212θθ θθl T (3) 从222(,,)x y z 到333(,,)x y z 的齐次旋转变换矩阵为: 33233 12cos sin 0sin cos 0000100 01l T θθθ θ-??????=?? ???? (3) 从),,(000z y x 到333(,,)x y z 的齐次旋转变换矩阵为: 1122 133 21122 33 001231 231231231121cos sin 00cos sin 0cos sin 0sin cos 00sin cos 00sin cos 000010001000 100 00100010001cos()sin()0cos cos(l l T T T T l l θθθθθθθθθθθθθθθθθθθθ---?????? ???????????? =??=??????????? ?? ??????? ++-+++=2123123 11212)sin()cos() 0sin sin()0010 000 1l l θθθθθθθθθθ+????++++++?? ??? ? ? ? (4) 那么,连杆2末段与中线交点处一点P 在基础坐标系中的位置矢量为: 12312311212312312311212003 311212312311212cos()sin()0cos cos()sin()cos()0sin sin()00010000011cos cos()cos()sin sin()l l l l l P T P l l l l l θθθθθθθθθθθθθθθθθθθθθθθθθθθ++-++++???????? ++++++????=?=? ???????????? +++++++=3123sin()011p p p x l y z θθθ???????? +++???? =???????? ???? (5) 即, 112123123112123123cos cos()+cos()sin sin()+sin() p p x l l l y l l l θθθθθθθθθθθθ=++++=++++ (6) 结论:(6)与用简单的平面几何关系建立运动学方程(1)相同。
运动技能的学习和发展
运动技能的学习和发展 运动技能从开始学习到形成熟练的技巧,有的人把这一过程划分为四个阶段,有的人划分为三个阶段,还有人把它划分为两个阶段。三十多年来传统的划分是泛化、分化、巩固和自动化四个阶段。其实无论怎样划分,阶段之间并无明确的具体界限,也不受固定时间的限制,各阶段总是互相联系,互相交错的。因此任何一种划分方法都是在一定程度上带有人为的主观成份,划分得越细,主观的成分就越多。划分运动时相的目的,主要是便于人们研究和论述问题。 一、运动时相的划分 美国运动生理学家贝克尔和扬把运动技能的学习和发展,划分为学习动作的粗略阶段与学习动作的熟练阶段两个时相。现分述如下: (一)学习动作的粗略阶段 1.外在表现与生理原因 (1)动作不准确,不协调、僵硬,多于动作较多。 (2)动作不连贯,缺乏节奏和韵律。 (3)错误动作较多。 (4)分不清动作的主要环节与次要环节。 (5)不能用语言来描述完成动作的情况。 (6)动作易受外界因素的干扰而破坏。 生理原因 (1)兴奋在大脑皮层扩散,是不该收缩的肌肉收缩,内抑制过程建立不完善。(2)兴奋与抑制尚未建立起连贯的定型。 (3)分化抑制不完善。 (4)分化抑制不完善和反馈调节不巩固。 (5)第一信号系统和第二信号系统未建立起巩固的选择性的联系。 (6)条件反射建立不巩固。 2.在教学训练中应注意的事项 (1)由于学生尚未建立起精确的肌肉感觉,学习动作主要靠视觉分析器的作用。因此本阶段的教学应注意所运用形象化的教学手段(如示范等),使 学生在模仿学习中通过视觉反馈逐步建立肌肉感觉。 (2)由于学生对所学习的新动作缺乏感性认识,抓不住主要技术环节,因此教师在教学过程中应注意突出重点,不宜过多的要求技术细节,以利于 分化抑制的建立。 (3)利用保护、帮助、降低难度动作等方法,使学生再不能独立完成动作的情况下,提高肌肉运动感觉,以及消除防御性反射对练习的干扰。(4)尽可能的应用直感教学法。直观教学法主要是发挥视觉作用,而直感教学法则综合利用视觉、听觉、皮肤触觉等各种感觉器官的作用。例如, 对镜练习、运用各种标志物、限制物(如游泳打腿的限制圈)、动作节拍 器、配乐练习等。 (5)教材安排及教学要求,应注意贯彻由易到难、由简到繁、由低到高的循序渐进的原则。选用的辅助练习应与教材的动作结构相似。 (6)教师对学生完成动作的情况多做正确的肯定和鼓励,对学生的动作要求,多从正面提出希望,以利于加速阳性条件反射的建立。例如,用做的对、做得好的语言来肯定学生的动作;对其不正确的动作,不用不对不好或
运动技能学原理作业
1.运动技能是如何发生的 运动技能的基本概念 运动技能是指人体在运动中掌握和有效地完成专门动作的能力。这种能力包括大脑皮质主导下的不同肌肉间的协调性。换言之,运动技能也就是指在准确的时间和空间里大脑精确支配肌肉收缩的能力。这需要用精确的力量和速度依一定的次序和时间去完成所需要的动作。运动技能的发展和提高,有赖于人们对人体机能客观规律的深刻认识和自觉运用。 运动技能的形成 运动技能的形成,是由简单到复杂的建立过程,并有其建立、形成、巩固和发展的阶段性变化和生理规律。只是每一阶段的长短,随动作的复杂程度而不同.一般说来,可划分为相互联系的三个阶段或称三个过程。 一、泛化过程 学习任何一个动作的初期,通过教师的讲解和示范以及自己的运动实践,只能获得一种感性认识,对运动的技能的内在规律并不完全理解.由于人体内外界的刺激,通过感受器(特别是本体感觉)传到大脑皮质,引起大脑皮质细胞强烈兴奋,另外因为皮质内抑制尚未确立,所以大脑皮质中的兴奋与抑制都呈现扩散状态,使条件反射暂时联系不稳定,出现泛化现象.这个过程表现在肌肉的外表活动往往是动作僵硬,不协调,不该收缩的肌肉收缩,出现多余的动作,而且做动作很费力。这些现象是大脑皮质细胞兴奋扩散的结果。在此过程,教师应该抓住动作的主要环节和学生掌握动作中存在的主要问题进行教学,不应过多强调动作细节,而应以正确的示范和简练的讲解帮助学生掌握动作。 二、分化过程 在不断的练习过程中,初学者对该运动技能的内在规律有了初步的理解,一些不协调和多余的动作也逐渐消除。此时,大脑皮质运动中枢兴奋和抑制过程逐渐集中,由于抑制过程加强,特别是分化抑制得到发展。大脑皮质的活动由泛化阶段进入了分化阶段,因此练习过程中的大部分错误动作得到纠正,能比较顺利地、连贯地完成完整动作技术。这是初步建立了动力定型。但定型尚不巩固,遇到新异刺激(如有外人参观或比赛),多余动作和错误动作可能重新出现。在此过程中,教师应特别注意错误动作的纠正,让学生体会动作的细节,促进分化抑制进一步发展,使动作日趋准确。 三、巩固过程 通过进一步反复练习,运动条件反射系统已经巩固,达到建立巩固的动力定型阶段,大脑皮质的兴奋和抑制在时间和空间上更加集中和精确.此时,不仅动作准确、优美,而且某些环节的动作还可出现自动化,即不必有意识去控制而能做出动作来。在环境条件变化时,动作技术也不易受破坏,同时由于内脏器官的活动与动作配合得很好,完成练习时也感到省力和轻松自如。 形成运动技能的三个过程是相互联系的,各过程之间并没有明显的界限。训练水平高的运动员在学习掌握新动作时,泛化过程很短,对动作的精细分化能力强.形成运动技能快。运动新手在学习新动作时,泛化过程较长,分化能力较差,掌握动作较慢。动作越复杂,泛化过程就越明显,分化的难度也就越大,形成运动技能所需要的时间就越大。 但是,动力定型发展到了巩固过程,也并不是可以一劳永逸了。一方面,还可在继续练习巩固的情况下精益求精,不断提高动作质量,使动力定型更加完善和巩固;另一方面,如果不再进行练习,巩固了的动力定型还会消退,技术愈复杂,难度愈大,消退得也愈快。在此过程中,教师应对学生提出进一步要求,并指导学生进行技术理论学习,更有利于动力定型的巩固和动作质量的提高,促使动作达到自动化程度。
第七章-动作技能的学习
第七章动作技能的学习 一、解释下列术语 动作 动作技能 熟练操作 练习 心理练习 集中练习 分配练习 整体练习 局部练习 随机练习 区组练习 情境干扰效应 固有的反馈 增补的反馈 结果的知识 觉错能力 反应时(间) 运动时(间) 运动能力倾向测 验答案
步。其最适当的解释是。(1)被试缺乏学习动机;(2)练习过多导致疲劳;(3)被试不知练习的结果;(4)缺乏适当的指导。 8.在动作技能学习的早期阶段,教师的示范不宜过快。这种现象的最适当解释是。(1)人的短时记忆容量有限;(2)学习应循序渐进;(3)防止过早出现疲劳;(4)先要有准备动作。 9.动作技能的教学方法一般宜于采用。(1)发现法;(2)讲解法;(3)示范法;(4)示范与讲解相结合方法。 10.动作技能教学一般通过示范与指导相结合进行,而不宜采用发现教学法,较恰当的理由是。(1)学生一般不能发现新的动作技能;(2)学生自己尝试的动作方法往往不够准确;(3)通过发现而出现的错误动作难以纠正;(4)以上三者都是可能的解释。 11.普通人每秒只能对外界刺激的变化进行两次调节,而熟练的钢琴家每秒能弹奏10个以上的音符。最适当的信息加工心理学解释是。(1)钢琴家有特殊天赋;(2)熟能生巧;(3)人脑中已形成的产生式系统能自动进行;(4)通过练习,注意分配能力增强。 12.根据动作技能能力倾向测验的原理,测量手指的灵活性可以较准确地预测下述技能的学习:(1)编织; (2)射箭;(3)铅球; (4)画画。 13.下列动作技能不易遗忘的是。(1)打太极拳;(2)骑自行车;(3)游泳;(4)广播操。 14.草书毛笔字主要需要下列运动技能。(1)大肌肉的;(2)小肌肉的;(3)连续的;(4)不连续的。 15.现代认知心理学家认为,动作技能的早期(即认知阶段)的主要任务是。(1)能陈述动作技能的规则; (2)体验动作技能学习的有效感;(3)对要完成的动作任务形成目标意象(goal image) ;(4)既要形成目标意象,又要形成目标期望。答案 四、研究与设计 1.观察一位中学或小学优秀体育教师的上课情况,并做详细记录(要求教师在课内教学生掌握某项体育动作)。或者收集优秀体育教师的教学经验总结,分析教师在教学时运用了本章介绍的哪些动作技能学习的原理。 2.观察并比较初入学儿童与熟练的书写者在书写常用汉字时的不同特征。 3.以情境干扰效应为例,说明什么是动作技能的学习以及如何测量这种学习。 4.认知领域中的知识和智慧技能学习的第一阶段重点在于理解,动作技能学习的第一阶段重点也在于理解。试分析这两个领域的学习在理解阶段学习的目的和条件的差异。 5.试分析练习在智慧技能学习领域和动作技能学习领域中的相同和不同作用。 6.假定一位小学语文老师要指导学生练好毛笔字,你认为本章阐述的哪些原理可指导教师的教