DSP复习资料

1、什么是数字信号处理器(DSP)?DSP 可以分为哪两类?
a、数字信号处理器是一种专门用于实现各种数字信号处理算法的微处理器,通常可分为专用DSP和通用DSP两类。
b、用于实现某些特定数字信号处理功能的DSP 属于专用DSP。
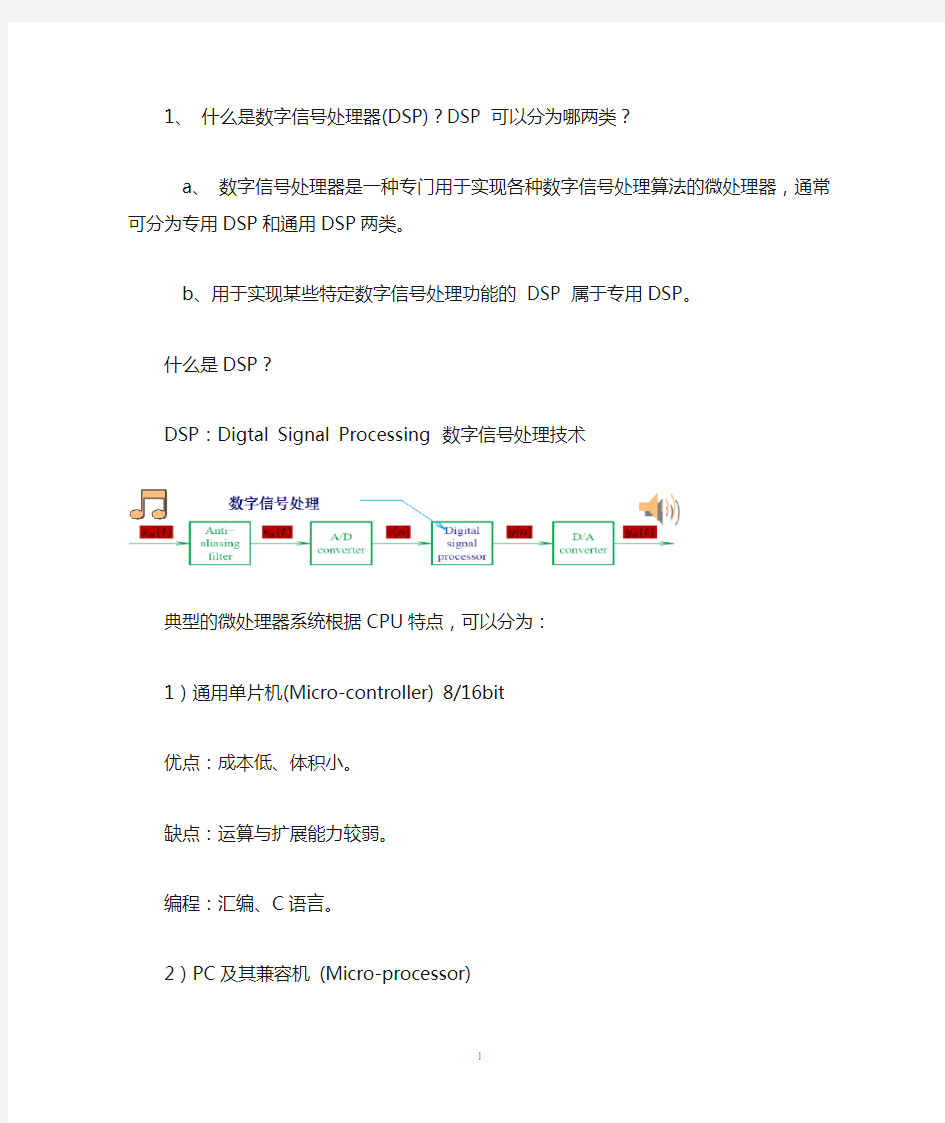
什么是DSP?
DSP:Digtal Signal Processing 数字信号处理技术
典型的微处理器系统根据CPU特点,可以分为:
1)通用单片机(Micro-controller) 8/16bit
优点:成本低、体积小。
缺点:运算与扩展能力较弱。
编程:汇编、C语言。
2)PC及其兼容机(Micro-processor)
缺点:成本高、体积大、实时性差。
优点:运算与扩展能力强,软件资源丰富。
编程:汇编及多种高级语言。
3)DSP(Digital Signal Processor)16/32bit
特点:运算能力相当强、实时性、体积小、成本较
低、功耗较低
编程:汇编、C、C++。
4)专用微处理器
特点:使用简单,灵活性差,主要用于一些批量生
产的产品。如家用电器的智能控制、工业控制。
DSP: Digtal Signal Processor 数字信号处理器
TI公司从80代初推出了全球第一款“数字信号处理器”TMS320C010,从此引发了一场“数字信号处理”革命。我们现在所说的DSP,如果没有特殊说明,一般均指“数字信号处理器”。
2、DSP 芯片的主要特点有哪些?DSP 从结构上进行了优化,使其更适合于哪类运算,从而可以高速实现多种不同的数字信号处理算法?
DSP的特点:
在一个指令周期内可完成一次乘法和一次加法运算
程序和数据空间分开,可以同时访问指令空间和数据空间
片内具有快速RAM,通常可通过独立的数据总线在两块中同时访问
具有低开销或无开销循环及跳转的硬件支持
快速的中断处理和硬件I/O支持
具有在单周期内操作的多个硬件地址产生器
可以并行执行多个操作
支持流水线操作,使取指令、译码、取操作数和执行指令等可以重叠执行。
3、什么是哈佛结构、什么是冯诺依曼结构,其区别是什么?另外,DSP 采用哪种类型?
冯·诺依曼结构:取指和取操作数都在同一总线上,通过分时复用的方式进行。缺点是在高速运行时,不能达到同时取指令和取操作数,从而形成了传输过程的瓶颈。
哈佛结构:芯片内部程序空间和数据空间分开,从而允许同时取指令和取操作数,从而大大提高运算能力。
4、TI 的新型DSP 芯片根据其不同应用领域可以划分为哪几个系列,每个系列分别面向哪类应用?
5、TMS320F281X 芯片的最小指令周期是多少?最高频率是多少?它是一种多少位的定点或是浮点DSP? F281X 采用低功耗设计,其内核电压为?I/O 端口电压为?
CPU主频高达150MHz,时钟周期为6.67ns。
采用低功耗设计,当内核电压为 1.8V时,主频为135MHz,当内核电压为 1.9V时,主频为150MHz,I/O口引脚电压为3.3V。
FLASH编程电压为3.3V。
6、TMS320F2812 DSP 芯片有哪些外部接口?各自的主要应用是什么?
第四章系统控制及中断
1、DSP 的时钟产生模块由哪些部分构成?
时钟模块提供两种操作模式:
▲内部振荡器:如果使用内部振荡器,则必须在X1/XCLKIN和X2两个引脚之间连接一个石英晶体。
▲外部时钟源:如果采用外部时钟,可以将输入的时钟信号直接接到X1/XCLKIN引脚上,而X2悬空。在这种情况下,不使用内部振荡器。
2、锁相环的配置模式及各模式下时钟输出的计算。
PLL 模式说明CLKIN
PLL 禁止上电复位时通过将XPLLDSIS(低电平有效)引脚置低来进入该模式,PLL 模块完全不使能。此时,输入CPU 的时钟是由外部振荡器直接通过X1/XCLKIN 引脚输入的信号。
XCLKIN
PLL 旁路如果PLL 未处于不使能的状态,上电默认的PLL 配置(PLLCR 的值为0)。PLL 自身被旁路,从X1/XCLKIN 引脚输入的时钟信号先被/2,然后再送去CPU。XCLKIN/2
PLL 使能通过给PLLCR 寄存器写一个不为0 的值来实现PLL 的使能,时钟信号需要进入PLL 模块进行n 倍频,然后再被/2,最后送至CPU。(XCLKIN*n)/2
PLL使能
我们平常使用的是第3 种方式,即PLL 使能,我们通采用30M 的晶振来给2812提供时基。PLLCR 的DIV 位被设置成最大值,即1010 的时候,CPU 的时钟将达到150MHZ,是2812 所能支持的最大时钟频率。时钟频率具体的计算如下所示:晶振为30M,PLLCR 的DIV 位被设置成1010 时的时钟频率CLKIN =(OSCLKIN*10/2
= (XCLKIN*10)/2
= (30M*10)/2=150M Hz
3、片内外设模块的时钟可以分为哪三类?
低速外设时钟信号,LSPCLK,主要用于SCI-A/B,SPI,McBSP 等串行接口外设;高速外设时钟信号,HSPCLK,主要用于EV-A/B,A/D 转换器等并行接口外设;CPU 时钟,SYSCLKOUT,主要用于eCAN 等外设模块。
例:
void InitSysCtrl(void)
{
Uint16 i;
EALLOW;
SysCtrlRegs.PLLCR = OxA ; //如果外部晶振为30M,SYSCLKOUT=150MHz
for(i= 0; i< 5000; i++){}
SysCtrlRegs.HISPCP.all =Ox0001 ; // HSPCLK=150/2=75MHz SysCtrlRegs.LOSPCP.all = Ox0002 ; // LSPCLK=150/4=37.5MHz SysCtrlRegs.PCLKCR.bit.ADCENCLK= 1 ; //ADC模块时钟使能SysCtrlRegs.PCLKCR.bit.EV AENCLK= 1 ; //EV A模块时钟使能EDIS;
4、F281x 共有几种工作模式?
IDLE模式(空闲模式):处理器可以通过被使能的中断或NMI中断退出IDLE模式。STANDBY(备用模式)模式:所有信号都能将CPU唤醒。
HALT模式(暂停模式):只有复位XRS和XNMI_XINT13外部中断信号能唤醒CPU工作。
5、请简述看门狗模块的工作原理。
当8 位的看门狗计数器进行加计数到最大值(0xFF)时,用户可选择看门狗模块通/WDRST 输出一个低电平脉冲(脉冲宽度512 个振荡器周期)来复位CPU,或通过/WDINT 来产生一个外设中断事件。在系统正常工作时,为避免看门狗模块产生不希望的脉冲信号,需要用户屏蔽看门狗模块或软件周期性向看门狗复位寄存器WDKEY 写入序列0x55+0xAA 来为看门狗计数器清零。
看门狗电路配置:
//禁止看门狗
void DisableDog(void)
{EALLOW;
SysCtrlRegs. WDCR = 0x0068
EDIS;}
//喂狗函数
void KickDog(void)
{EALLOW;
SysCtrlRegs. WDKEY = 0x55
SysCtrlRegs. WDKEY = 0xAA
EDIS;}
6、TMS320F281X 中含有多少个32 位的通用定时器?
F2812器件上有3个32位的CPU定时器:
TIMER0 :CPU定时器TIMER0用户可以使用
TIMER1
TIMER2
CPU定时器一个周期所计量的时间
假设系统时钟SYSCLKOUT的值为X MHz,那么计数器每走一步,所需要的时间为:
因为CPU定时器一个周期计数了(PRDH:PRD+1)次,因此
CPU定时器一个周期所计量的时间为:
7、F281X 芯片提供了56 个通用I/O 引脚(GPIO),它们可以有数字I/O 和外设I/O 两种工作模式,其工作模式的选择如何设置?当配置为数字I/O 模式时,可以通过什么寄存器配置其为输入或输出?
控制寄存器
GPxMUX 功能选择控制寄存器
GPxDIR 方向控制寄存器
GPxQUAL 输入限定控制寄存器
数据寄存器
GPxDAT 数据寄存器
GPxSET 置位寄存器
GPxCLEAR 清除寄存器
GPxTOGGLE 取反寄存器
例:
void InitGpio(void)
{
EALLOW ; //读取使能
GpioDataRegs.GPFCLEAR.bit.GPIOF14 = 1 ; //XF引脚输出为低电平GpioMuxRegs.GPFMUX.bit.SPISIMOA_GPIOF0 = 1 ;//选择SPISIMO
引脚为功能引脚GpioMuxRegs.GPFMUX.bit.SPICLKA_GPIOF2 = 1 ;//选择SPICLK引
脚为功能引脚
GpioMuxRegs.GPFMUX.bit.SPISTEA_GPIOF3= 0 ; //选择SPISTE引脚
为通用I/O
GpioMuxRegs.GPFDIR.bit.GPIOF3= 1 ; //方向为输出,低电平时选中
EDIS ; // 读取禁止
}
8、F281x 的中断系统可分为哪三种中断级别?
F2812 的中断是3 级中断机制,分别是外设级,PIE 级以及CPU 级,对于某一个具体的外设中断请求,任意一级的不许可,CPU 最终都不会执行该外设中断。就像一个文件需要三级领导批示一样,任意一级领导的不同意,都不能被送至上一级领导,更不可能得到最终的批准,中断机制的原理也是如此。
9、DSP 中中断响应处理流程。
中断工作过程
10、中断向量表是什么?
a、它是用于存储每个中断服务程序ISR 的入
口地址(中断向量)。
b、中断向量表用于存储每个中断服务程序的
入口地址。所有中断向量都是受
EALLOW 机制保护的。
第五章TMS320F2812外部接口(XINTF)
1、理解F2812 的外部扩展接口XINTF。
外部接口(XINTF)映射到5个独立的存储空间Zone0、Zone1、Zone2、Zone6、Zone7
当访问相应的存储空间时,就会产生一个片选信号;XINTF的5个空间共有3个片选引脚。
Zone0、Zone1共用XZCS0AND1。
Zone6、Zone7共用XZCS6AND7。
Zone2单独使用片选信号XZCS2。
每个空间都可以独立地设置访问等待、选择、建立以及保持时间,同时还可以使用XREADY 信号来控制外设的访问。
外部接口的访问时钟频率由内部的XTIMCLK提供
XTIMCLK可以等于SYSCLKOUT或SYSCLKOUT/2。
第六章TMS320F2812串行通信接口SCI
1、SCI模块的基本原理及应用。
SCI(Serial Communication Interface),即串行通信接口,是一个双线的异步串口,即具有接收和发送两根信号线的异步串口,一般可以看作是UART(通用异步接收/发送装置)。F2812 的SCI 模块支持DSP 与采用NRZ(non-return-to-zero 不归零)标准格式的异步外围设备之间进行数字通信。
2812 内部具有两个相同的SCI 模块,SCIA 和SCIB。
2、SCI模块是如何接收和发送数据的?
接收数据
1)置RXENA=1(SCICTL1.D0),使能接收器接收数据;
2)数据到达SCIRXD引脚后,检测起始位(SCI自动实现);
3)数据从RXSHF寄存器移位到接收缓冲寄存器(SCIRXBUF),
产生一个中断请求,同时接收器数据准备好标志RXRDY=1;
4)用户程序读取SCIRXBUF寄存器,标志位RXRDY自动清零;
5)数据的下一个字符到达SCIRXD引脚,检测到起始位;
6)RXENA=0,禁止接收数据。继续向RXSHF装载数据,但不送入SCIRXBUF。
发送数据
1)TXENA=1(SCICTL1.D1),使能发送器发送数据;
2)程序写数据到SCITXBUF寄存器,此时发送器不为空,TXRDY变低;
3)SCI发送数据到移位寄存器TXSHF后,产生中断请求,同时TXRDY变高;
4)TXRDY变高后,程序写第二个字符到SCITXBUF,随后TXRDY又变低;
5)发送完第一个字符,开始将第二个字符移位到寄存器TXSHF;
6)TXENA=0,禁止发送数据,SCI继续完成当前字符的发送;
3、如何配置SCI的波特率寄存器。
波特率:串行通信过程每秒钟传送的二进制脉冲数目(bit/s)
串行时钟SCICLK由低速外设时钟LSPCLK和波特率选择寄存器确定;
SCI使用16位波特率选择寄存器,可以设定为64K种波特率;
SCI模块通信波特率与波特率选择寄存器之间的关系如下所示:
说明:BRR为SCI波特率选择寄存器中的值,从十进制转换成
16进制后,其高8位赋值给SCIHBAUD,低8位赋值给
SCILBAUD。且该公式只适用于
。
当BRR=0时,SCI模块通信的波特率为:
例:
已知OSCCLK=30M,
SysCtrlRegs.PLLCR=0xA;
SysCtrlRegs.HISPCP.all=0x3;
SysCtrlRegs.LOSPCP.all=0x2;
根据以下程序,计算其波特率,要求写出相关的表达式和具体的计算步骤。V oid SCI_Init(void)
{
SciaRegs.SCICCR.all=0x0007;
SciaRegs.SCICTL1.all=0x0003;
SciaRegs.SCIHBAUD=243 >> 8;
SciaRegs.SCILBAUD =243&0x00FF;
SciaRegs.SCICTL1.all=0x0023;
}
(1)BRR=243;
(2)LSPCLK=SYSCLKOUT/(LOSPCP*2)=150/(2*2)=37.5MHZ
(3)所以由公式:
SCI异步波特率=LSPCLK/((BRR+1)*8)
(4)SCI异步波特率=37.5MHZ/((243+1)*8)
(5)SCI异步波特率=19211.06B
第七章TMS320F2812的串行外围设备接口(SPI)1、请简述SPI模块的CPU接口。两种工作方式:主/从工作方式
数据长度:1~16位可编程
4种时钟模式:由极性和相位控制
波特率:125种可编程
接口方式:中断或查询
可同时进行发送和接收操作
2、SPI是否只能工作在主机模式下?
主模式
SPI的引脚SPICLK为整个串行通信网络提供时钟;
通过SPIBRR寄存器设定通信网络的数据传输速率;
数据从SPISIMO输出,并锁存从SPISOMI输入的数据;
通常作为片选信号,数据传输过程置低电平,传输完成后置高。
发送数据:
写数据到SPIDAT或SPITXBUF,启动SPISIMO引脚上的数据发送,首先发送最高有效位(MSB)(与SCI有所不同)。
接收数据:
当指定数量的数据位已经通过SPIDA T移位后,SPIDA T中的数据发送到SPIRXBUF 中,且SPI INF FLAG置1。
从模式
从模式:Master/Slave=0
从模式下,SPICLK时钟由主控制器提供,并决定了传输速率。
数据从SPISIMO引脚输入,从SPISOMI引脚输出。
/SPISTE通常作为从设备的片选信号,数据传输过程置低电平,传输完成后置高.
TALK位(SPICTL.D1)
当TALK位清零,数据发送被禁止,输出引脚(SPISOMI)处于高阻状态。若发送期间清零TALK位,SPI要继续完成当前的字符传输,以保证SPI设备正确接收数据。
TALK位允许在一个网络上连接多个从SPI设备,但同一时刻只能有一个从设备允许驱动SPISOMI。
2、整个SPI的通信网络当中的时钟和波特率是由主机来提供的吗?
串行外设接口(SPI)是一种同步串行输入/输出接口,传输速率较高(LSPCLK/4)
3、主机的数据是如何发送和接收的?
SPI是一个环形总线结构,其时序其实比较简单,主要是在时钟脉冲SCK的控制下,两个双向移位寄存器SPIDA T进行数据交换。
4、SPI的波特率如何设置?
波特率的计算方法:
1)当SPIBRR=3~127时:
SPI波特率=LSPCLK/(SPIBRR+1)
2)当SPIBRR=0、1、2时:
SPI波特率=LSPCLK/4
例2:假定LSPCLK=75MHz,试确定SPI的波特率范围。
SPI波特率最大值:LSPCLK/4=18.75MHz
SPI波特率最小值:LSPCLK/128=0.586MHz
第九章TMS320F2812模/数转换(ADC)模块
1、掌握A/D 转换模块的基本概念。
第十章模数转换ADC模块
模数转换(ADC)模块的特性
1、ADC模块的特性
(1)带有内部采样-保持电路12bit ADC模块
(2)16个模拟输入通道,每8个通过一个8选1的模拟多路转
换开关。
(3)ADC模拟输入电压的范围为0—3V
(4)对16路模拟量进行“自动排序”。
(5)两个独立的8状态排序器(SEQ1和SEQ2),可以独立
工作在双排序器模式,或级联为16个状态排序器模式
(SEQ一级联模式)。
(6)在给定的排序模式下,4个排序控制器决定通道的转换
顺序。
(7)16个存放结果的寄存器(RESULT0~RESULT15)
(8)有多个启动ADC转换的触发源如下:
软件立即启动EV A事件管理器启动
EVB事件管理器启动ADC 的SOC引脚启动
(9)EV A和EVB可分别独立地触发SEQ1和SEQ2(仅用于
双排序器模式)
(10)有单独的预定标的采样/保持时间
2、ADC 模块的排序器有哪两种工作模式?
a、双排序器模式下两个排序器共享同一个A/D
转换器。若SEQ1 和SEQ2 同时产生自动转
换请求,则排序器1 具有更高的优先级并被
立即响应
b、每次排序转换时所选择的模拟输入通
道由ADC 通道选择排序控制寄存器
(ADCCHSELSEQn)位域CONVnn 确定
3、ADC 模块有哪两种不同的采样模式?对于每一个转换,被采样和转换的外部输入通道由什么决定?
A、顺序采样模式下,CONVxx 位确定采样与转换的模拟输入
通道,最高位确定采用SHA或SHB,其余3 位定义通道号。
例:
CONVxx=0101B, 选择ADCINA5;CONVxx=1011B, 选择
ADCINB3。
B、同步模式下,CONVxx 的低3 位确定采样与转换的模拟输
入通道对(SHA、SHB 的输入通道序号相同),最高位不起作
用。
例:
CONVxx=x110B, 选择ADCINA6 和ADCINB6,依次转换
SHA、SHB 中保持的电压量,结果存至ADCRESULTn、
ADCRESULT(n+1) 中。
第十章TMS320F2812事件管理器(EV)模块
1、掌握F281x 事件管理器的构成。
通用定时器功能:具有计数/定时功能,可以为各种应用提供时基,并可以产生比较输出/PWM信号。
比较单元功能:三个比较单元可以输出3组(6路)比较输出/PWM信号,且具有死区控制等功能。
捕获单元功能:三个捕获单元可以记录输入引脚上信号跳变的时刻。
QEP电路功能:具有直接连接光电编码器脉冲的能力,可获得旋转机械的速度和方向等信息。
注意:输入跳变脉冲宽度至少保持两个CPU时钟周期才能被识别。事件管理器的特殊设计,使得事件管理器既可以实时控制电机(由PWM电路实现),同时还可以监视电机的运行状态(由QEP电路实现)。
2、通用定时器的基础知识。
每个事件管理模块有两个通用定时器(GP),这些定时器可以为下列应用提供独立的时间基准:
A、控制系统中采样周期产生。
B、为QEP电路和捕获单元的操作提供时间基准。
C、为比较单元和相应的PWM电路操作提供时间基准。
计数寄存器TxCNT 保存当前时刻定时器的计数值;比较寄存器TxCMPR 保存定时器的比较值;周期寄存器TxPR 保存定时器的周期值。EV A 包含通用定时器1、2;EVB 包含通用定时器3、4;它们为16 位计数器;定时器1、2 属于事件管理器__A__。事件管理器的通用定时器为16 位计数器。通用定时器的外部时钟输入允许的频率不超过CPU 时钟的?。
3、通用定时器有几种计数方式?
每个GP定时器有四种可选的操作模式:
停止/保持模式
连续增/减计数模式
连续递增计数模式
定向增/减计数模式
相应的定时器控制寄存器TxCON中的位的形式决
定了通用定时器的操作模式。
A、连续递增计数模式的工作过程;在连续递增计数模式下,除第一个计数周期外,定时器的计数周期为(TxPR+1)个定标后的时钟输入周期;该计数模式下主要用于产生边沿触发或异步PWM 波形;
B、定向增减计数模式的工作过程分析;在定向增/减计数模式下,通用定时器根据预定标后的时钟和计数方向输入引脚(TDIRA/B)进行递增或递减计数;当计数方向引脚TDIRA/B 电平发生变化时,定时器在当前计数时钟周期结束后再延迟一个计数时钟才会改变计数方向。
C、连续增/减计数模式工作过程分析;在该计数模式下,除第一个周期外,定时器的计数周期为2·TxPR 个定标后的时钟周期。用于产生中心对称的PWM 波形。
4、通用定时器有几种中断形式?
以T1为例
上溢中断T1OFINT
下溢中断T1UFINT
比较中断T1CINT
周期中断T1PINT
5、如何应用通用定时器产生PWM 信号?如果选用连续递增计数模式产生非对称波形,定时器周期如何计算?如果选用连续增减计数模式,定时器周期如何计算?
利用EV的通用定时器产生非对称的PWM信号,已知:f=1KHz,D=40%;OSCCLK=30MHz,锁相环倍频系数=5,高速外设时钟采用复位时默认值;通用定时器时钟不分频,PWM低电平输出有效。此时试计算确定T1PR和T1CMPR的数值。
(1)∵锁相环倍频系数=5 ∴SYSCLKOUT=(OSCCLK*n)/2=30MHz*5/2=75MHz
(2)∵高速外设时钟采用复位默认值∴HSPCLK=SYSCLKOUT/2=75MHz/2=37.5MHz
(3)∵产生不对称PWM信号,∴定时器工作在连续增计数模式,
(4)∵PWM引脚低电平信号有效,
数字信号处理试题
一、 单 项选择题 1. 序列x(n)=Re(e jn π/12 )+I m (e jn π/18 ),周期为( )。 A. 18π B. 72 C. 18π D. 36 2. 设C 为Z 变换X(z)收敛域内的一条包围原点的闭曲线,F(z)=X(z)z n-1 ,用留数法求X(z)的反变换时( )。 A. 只能用F(z)在C 内的全部极点 B. 只能用F(z)在C 外的全部极点 C. 必须用收敛域内的全部极点 D. 用F(z)在C 内的全部极点或C 外的全部极点 3. 有限长序列h(n)(0≤n ≤N-1)关于τ= 2 1 -N 偶对称的条件是( )。 A. h(n)=h(N-n) B. h(n)=h(N-n-1) C. h(n)=h(-n) D. h(n)=h(N+n-1) 4. 对于x(n)= n )21(u(n)的Z 变换,( )。 A. 零点为z=21,极点为z=0 B. 零点为z=0,极点为z=21 C. 零点为z=21,极点为z=1 D. 零点为z=2 1 ,极点为z=2 5、)()(101n R n x =,)()(72n R n x =,用DFT 计算二者的线性卷积,为使计算量尽可能的少,应使DFT 的长度N 满足 。 A.16>N B.16=N C.16
数字信号处理考试试题及答案
数字信号处理试题及答案 一、 填空题(30分,每空1分) 1、对模拟信号(一维信号,是时间的函数)进行采样后,就是 离散时间 信号, 再进行幅度量化后就是 数字 信号。 2、已知线性时不变系统的单位脉冲响应为)(n h ,则系统具有因果性要求 )0(0)(<=n n h ,系统稳定要求∞<∑∞ -∞=n n h )(。 3、若有限长序列x(n)的长度为N ,h(n)的长度为M ,则其卷积和的长度L 为 N+M-1。 4、傅里叶变换的几种形式:连续时间、连续频率—傅里叶变换;连续时间离散频率—傅里叶级数;离散时间、连续频率—序列的傅里叶变换;散时间、 离散频率—离散傅里叶变换 5、 序列)(n x 的N 点DFT 是)(n x 的Z 变换在 单位圆上 的N 点等间隔采样。 6、若序列的Fourier 变换存在且连续,且是其z 变换在单位圆上的值,则序列 x(n)一定绝对可和。 7、 用来计算N =16点DFT ,直接计算需要__256___次复乘法,采用基2FFT 算 法,需要__32__ 次复乘法 。 8、线性相位FIR 数字滤波器的单位脉冲响应()h n 应满足条件 ()()1--±=n N h n h 。 9. IIR 数字滤波器的基本结构中, 直接 型运算累积误差较大; 级联型 运 算累积误差较小; 并联型 运算误差最小且运算速度最高。 10. 数字滤波器按功能分包括 低通 、 高通 、 带通 、 带阻 滤 波器。 11. 若滤波器通带内 群延迟响应 = 常数,则为线性相位滤波器。 12. ()?? ? ??=n A n x 73cos π错误!未找到引用源。的周期为 14 13. 求z 反变换通常有 围线积分法(留数法)、部分分式法、长除法等。 14. 用模拟滤波器设计IIR 数字滤波器的方法包括:冲激响应不变法、阶跃响 应不变法、双线性变换法。
数字信号处理知识点总结
《数字信号处理》辅导 一、离散时间信号和系统的时域分析 (一) 离散时间信号 (1)基本概念 信号:信号传递信息的函数也是独立变量的函数,这个变量可以是时间、空间位置等。 连续信号:在某个时间区间,除有限间断点外所有瞬时均有确定值。 模拟信号:是连续信号的特例。时间和幅度均连续。 离散信号:时间上不连续,幅度连续。常见离散信号——序列。 数字信号:幅度量化,时间和幅度均不连续。 (2)基本序列(课本第7——10页) 1)单位脉冲序列 1,0()0,0n n n δ=?=?≠? 2)单位阶跃序列 1,0 ()0,0n u n n ≥?=?≤? 3)矩形序列 1,01 ()0,0,N n N R n n n N ≤≤-?=?<≥? 4)实指数序列 ()n a u n 5)正弦序列 0()sin()x n A n ωθ=+ 6)复指数序列 ()j n n x n e e ωσ= (3)周期序列 1)定义:对于序列()x n ,若存在正整数N 使()(),x n x n N n =+-∞<<∞ 则称()x n 为周期序列,记为()x n ,N 为其周期。 注意正弦周期序列周期性的判定(课本第10页) 2)周期序列的表示方法: a.主值区间表示法 b.模N 表示法 3)周期延拓 设()x n 为N 点非周期序列,以周期序列L 对作()x n 无限次移位相加,即可得到周期序列()x n ,即 ()()i x n x n iL ∞ =-∞ = -∑ 当L N ≥时,()()()N x n x n R n = 当L N <时,()()()N x n x n R n ≠ (4)序列的分解 序列共轭对称分解定理:对于任意给定的整数M ,任何序列()x n 都可以分解成关于/2c M =共轭对称的序列()e x n 和共轭反对称的序列()o x n 之和,即
数字信号处理期末重点复习资料
1、对模拟信号(一维信号,是时间的函数)进行采样后,就是 离散 信号,再进行幅度量化后就是 数字信号。 2、若线性时不变系统是有因果性,则该系统的单位取样响应序列h(n)应满足的充分必要条件是 当n<0时,h(n)=0 。 3、序列)(n x 的N 点DFT 是)(n x 的Z 变换在 单位圆 的N 点等间隔采样。 4、)()(5241n R x n R x ==,只有当循环卷积长度L ≥8 时,二者的循环卷积等于线性 卷积。 5、已知系统的单位抽样响应为h(n),则系统稳定的充要条件是 ()n h n ∞ =-∞ <∞∑ 6、用来计算N =16点DFT ,直接计算需要(N 2)16*16=256_次复乘法,采用基2FFT 算法,需要__(N/2 )×log 2N =8×4=32 次复乘法。 7、无限长单位冲激响应(IIR )滤波器的基本结构有直接Ⅰ型,直接Ⅱ型,_级联型_和 并联型_四种。 8、IIR 系统的系统函数为)(z H ,分别用直接型,级联型,并联型结构实现,其中 并联型的运算速度最高。 9、数字信号处理的三种基本运算是:延时、乘法、加法 10、两个有限长序列 和 长度分别是 和 ,在做线性卷积后结果长度是 __N 1+N 2-1_。 11、N=2M 点基2FFT ,共有 M 列蝶形,每列有N/2 个蝶形。 12、线性相位FIR 滤波器的零点分布特点是 互为倒数的共轭对 13、数字信号处理的三种基本运算是: 延时、乘法、加法 14、在利用窗函数法设计FIR 滤波器时,窗函数的窗谱性能指标中最重要的是___过渡带宽___与__阻带最小衰减__。 16、_脉冲响应不变法_设计IIR 滤波器不会产生畸变。 17、用窗口法设计FIR 滤波器时影响滤波器幅频特性质量的主要原因是主瓣使数字滤波器存在过渡带,旁瓣使数字滤波器存在波动,减少阻带衰减。 18、单位脉冲响应分别为 和 的两线性系统相串联,其等效系统函数时域及频域表 达式分别是h(n)=h1(n)*h2(n), =H1(ej ω)×H2(ej ω)。 19、稳定系统的系统函数H(z)的收敛域包括 单位圆 。 20、对于M 点的有限长序列x(n),频域采样不失真的条件是 频域采样点数N 要大于时域采样点数M 。
数字信号处理期末试卷!
数字信号处理模拟试题一 一、单项选择题(本大题共10小题,每小题2分,共20分) 在每小题列出的四个备选项中只有一个是符合题目要求的,请将其代码填写在题后的括号内。错选、多选或未选均无分。 1.在对连续信号均匀采样时,要从离散采样值不失真恢复原信号,则采样角频率Ωs与信号最高截止频率Ωc应满足关系(A ) A.Ωs>2Ωc B.Ωs>Ωc C.Ωs<Ωc D.Ωs<2Ωc 2.下列系统(其中y(n)为输出序列,x(n)为输入序列)中哪个属于线性系统?(D) A.y(n)=y(n-1)x(n) B.y(n)=x(n)/x(n+1) C.y(n)=x(n)+1 D.y(n)=x(n)-x(n-1) 3.已知某序列Z变换的收敛域为5>|z|>3,则该序列为(D ) A.有限长序列 B.右边序列 C.左边序列 D.双边序列 4.实偶序列傅里叶变换是(A ) A.实偶序列 B.实奇序列 C.虚偶序列 D.虚奇序列 5.已知x(n)=δ(n),其N点的DFT[x(n)]=X(k),则X(N-1)=(B) A.N-1 B.1 C.0 D.-N+1 6.设两有限长序列的长度分别是M与N,欲通过计算两者的圆周卷积来得到两者的线性卷积,则圆周卷积的点数至少应取(B ) A.M+N B.M+N-1 C.M+N+1 D.2(M+N) 7.下面说法中正确的是(C) A.连续非周期信号的频谱为周期连续函数 B.连续周期信号的频谱为周期连续函数 C.离散非周期信号的频谱为周期连续函数 D.离散周期信号的频谱为周期连续函数 8.下列各种滤波器的结构中哪种不是IIR滤波器的基本结构?(C ) A.直接型 B.级联型 C.频率抽样型 D.并联型 9.下列关于FIR滤波器的说法中正确的是(C) A.FIR滤波器容易设计成线性相位特性
数字信号处理试题及答案
数字信号处理试题及答案 一、填空题:(每空1分,共18分) 1、 数字频率ω是模拟频率Ω对采样频率s f 的归一化,其值是 连续 (连续还是离散?)。 2、 双边序列z 变换的收敛域形状为 圆环或空集 。 3、 某序列的 DFT 表达式为∑-==1 0)()(N n kn M W n x k X ,由此可以看出,该序列时域的长度为 N ,变换后数字频域上相邻两个频率样点之间的间隔是 M π 2 。 4、 线性时不变系统离散时间因果系统的系统函数为2 52) 1(8)(2 2++--=z z z z z H ,则系统的极点为 2,2 1 21-=-=z z ;系统的稳定性为 不稳定 。系统单位冲激响应)(n h 的初值 4)0(=h ;终值)(∞h 不存在 。 5、 如果序列)(n x 是一长度为64点的有限长序列)630(≤≤n ,序列)(n h 是一长度为128点 的有限长序列)1270(≤≤n ,记)()()(n h n x n y *=(线性卷积),则)(n y 为 64+128-1=191点 点的序列,如果采用基FFT 2算法以快速卷积的方式实现线性卷积,则FFT 的点数至少为 256 点。 6、 用冲激响应不变法将一模拟滤波器映射为数字滤波器时,模拟频率Ω与数字频率ω之间的 映射变换关系为T ω = Ω。用双线性变换法将一模拟滤波器映射为数字滤波器时,模拟频率Ω 与数字频率ω之间的映射变换关系为)2 tan(2ω T =Ω或)2arctan(2T Ω=ω。 7、当线性相位 FIR 数字滤波器满足偶对称条件时,其单位冲激响应)(n h 满足的条件为 )1()(n N h n h --= ,此时对应系统的频率响应)()()(ω?ω ωj j e H e H =,则其对应的相位函数 为ωω?2 1 )(-- =N 。 8、请写出三种常用低通原型模拟滤波器 巴特沃什滤波器 、 切比雪夫滤波器 、 椭圆滤波器 。 二、判断题(每题2分,共10分) 1、 模拟信号也可以与数字信号一样在计算机上进行数字信号处理,只要加一道采样的工序就可 以了。 (╳) 2、 已知某离散时间系统为)35()]([)(+==n x n x T n y ,则该系统为线性时不变系统。(╳)
数字信号处理总结与-习题(答案
对模拟信号(一维信号,是时间的函数)进行采样后,就是 离散 信号,再进行幅度量化后就是 数字信号。2、若线性时不变系统是有因果性,则该系统的单位取样响应序列h(n)应满足的充分必要条件是 当n<0时,h(n)=0 。3、序列)(n x 的N 点DFT 是)(n x 的Z 变换在 单位圆 的N 点等间隔采样。4、)()(5241 n R x n R x ==,只有 当循环卷积长度L ≥8 时,二者的循环卷积等于线性卷积。5、已知系统的单位抽样响应为h(n),则系统稳定的充要条件是 ()n h n ∞ =-∞ <∞ ∑ 6、用来计算N =16点DFT ,直接计算需要(N 2 )16*16=256_次复乘法,采用基2FFT 算法, 需要__(N/2 )×log 2N =8×4=32 次复乘法。7、无限长单位冲激响应(IIR )滤波器的基本结构有直接Ⅰ型,直接Ⅱ型,_级联型_和 并联型_四种。8、IIR 系统的系统函数为)(z H ,分别用直接型,级联型,并联型结构实现,其中 并 联型的运算速度最高。9、数字信号处理的三种基本运算是:延时、乘法、加法 10、两个有限长序列 和 长度分别是 和 ,在做线性卷积后结果长度是__N 1+N 2-1_。11、N=2M 点基2FFT ,共有 M 列蝶形, 每列有N/2 个蝶形。12、线性相位FIR 滤波器的零点分布特点是 互为倒数的共轭对 13、数字信号处理的三种基本运算是: 延时、乘法、加法 14、在利用窗函数法设计FIR 滤波器时,窗函数的窗谱性能指标中最重要的是___过渡带宽___与__阻带最小衰减__。16、_脉冲响应不变法_设计IIR 滤波器不会产生畸变。17、用窗口法设计FIR 滤波器时影响滤波器幅频特性质量的主要原因是主瓣使数字滤波器存在过渡带,旁瓣使数字滤波器存在波动,减少阻带衰减。18、单位脉冲响应分别为 和 的两线性系统相串联,其等效系统函数时域及频域表达式分别是h(n)=h 1(n)*h 2(n), =H 1(e j ω )× H 2(e j ω )。19、稳定系统的系统函数H(z)的收敛域包括 单位圆 。20、对于M 点的有限长序列x(n),频域采样不失真的条件是 频域采样点数N 要大于时域采样点数M 。 1、下列系统(其中y(n)为输出序列,x(n)为输入序列)中哪个属于线性系统?( y(n)=x(n 2 ) ) A.窗函数的截取长度增加,则主瓣宽度减小,旁瓣宽度减小 B.窗函数的旁瓣相对幅度取决于窗函数的形状,与窗函数的截取长度无关 C.为减小旁瓣相对幅度而改变窗函数的形状,通常主瓣的宽度会增加 D.窗函数法能用于设计FIR 高通滤波4、因果FIR 滤波器的系统函数H(z)的全部极点都在(z = 0 )处。6、已知某序列z 变换的收敛域为|z|<1,则该序列为(左边序列)。7、序列)1() (---=n u a n x n ,则)(Z X 的收敛域为(a Z <。8、在对连续信号均匀 采样时,要从离散采样值不失真恢复原信号,则采样周期T s 与信号最高截止频率f h 应满足关系(T s <1/(2f h ) ) 9、 )()(101n R n x =,)()(72n R n x =,用DFT 计算二者的线性卷积,为使计算量尽可能的少,应使DFT 的长度N 满足 (16=N )。10、线性相位FIR 滤波器有几种类型( 4) 。11、在IIR 数字滤波器的设计中,用哪种方法只适 合于片断常数特性滤波器的设计。(双线性变换法)12、下列对IIR 滤波器特点的论述中错误的是( C )。 A .系统的单位冲激响应h(n)是无限长的B.结构必是递归型的C.肯定是稳定的D.系统函数H(z)在有限z 平面(0<|z|<∞)上有极点 13、有限长序列h(n)(0≤n ≤N-1)关于τ= 2 1 -N 偶对称的条件是(h(n)=h(N-n-1))。14、下列关于窗函数设计法的说法中错误的是( D )。A.窗函数的截取长度增加,则主瓣宽度减小,旁瓣宽度减小 B.窗函数的旁瓣相对幅度取决于窗函数的形状,与窗函数的截取长度无关 C.为减小旁瓣相对幅度而改变窗函数的形状,通常主瓣的宽度会增加 D.窗函数法不能用于设计FIR 高通滤波器 15、对于傅立叶级数而言,其信号的特点是(时域连续非周期,频域连续非周期)。
总复习《数字信号处理》杨毅明
总复习《数字信号处理》杨毅明 第1章 1. 请说明数字信号处理的概念,并根据数字信号处理的特点,说明数字信号处理的优点。 2. 如果把数字信号处理系统分为五个(或七个、三个)部分,请指出它们是哪五个部分,并解释这五部分的作用。(参见课件) 3. 请指出模拟信号、连续时间信号、离散时间信号和数字信号之间的区别。 4. 能判断两个信号相似程度的函数叫什么名字?(利用课本后面的索引去找) 5. 数字信号处理器的信号与通用计算机的信号有什么不同? 第2章 1. 请将离散时间信号x(n)=R17(n)分别用单位脉冲信号和单位阶跃信号表示。 2. 请问序列x(n)=sin(0.3n)和y(n)=sin(0.3πn)是不是周期序列?为什么? 3. 若x(n)=δ(n-7)和y(n)=sin(0.89πn)u(n),求w(n)=x(n)*y(n)。 4. 如果x(n)=R3(n)和h(n)= R3(n),请用图解法来计算它们的卷积y(n)=x(n)*h(n)。 5. 若x(n)=u(n)-u(n-6)-R5(n)和h(n)=e-3n u(n),求y(n)= x(n)*h(n)。 6. 判断序列x(n)=sin(πn/4)-cos(πn/7)是否是周期序列?若是的话,请确定它的周期。 7. 判断序列x(n)=e j(n/8-π)是否是周期序列?若是的话,请确定它的周期。 8. 判断序列x(n)=sin(πn/8-π)u(n)是否是周期序列?若是的话,请确定它的周期。 9. 请根据图1的序列x(n)的波形,画出序列x(-n)和x(3-n)的波形。 图1 序列x(n)的波形 10. 设系统的差分方程为y(n)=x(n)+2x(n-1)+3x(n-2),请判断它是否是线性系统? 11. 设系统的输入输出方程为y(n)=T[x(n)]=nx(n),请判断它是否是时不变的系统? 12. 设系统的差分方程为y(n)=2x(n-1)+3,请判断它是否是线性时不变的系统。 13. 设系统的差分方程为y(n)=x(n)+2x(n+1),请判断它是否是因果系统? 14. 设系统的输入输出方程为y(n)=T[x(n)]=x(n)+2x(n-1),请判断它是否是稳定系统,并说明理由。 15. 设系统的单位脉冲响应为h(n)=2cos(0.3n+1)u(n),请判断它是否是因果稳定的系统,并说明理由。 16. 设系统的单位脉冲响应为h(n)=R4(n+2),请判断它是否是因果系统?如果不是,该怎样将它变为因果系统?并说明理由。 17. 若x(n)=R6(n-1)-R3(n-2)-δ(n-6)和h(n)=cos(0.2πn)u(n),求y(n)= x(n)*h(n)。 18. 设因果系统的差分方程为y(n)=x(n)+0.8y(n-1),请用递推法求该系统的单位脉冲响应。 19. 有一个连续信号x a(t)=cos(2πft+0.3),其f=20Hz,求x a(t)的周期。若对它以T S=0.02秒的时间间隔采样,请写出x(n)= x a(t)|t=nT的表达式,并求x(n)的周期。 20. 请问:什么叫卷积序列?什么叫相关序列?两者在运算方面有什么区别?在应用方面有什么区别?
数字信号处理试卷及答案
A 一、 选择题(每题3分,共5题) 1、)6 3()(π-=n j e n x ,该序列是 。 A.非周期序列 B.周期6 π = N C.周期π6=N D. 周期π2=N 2、序列)1()(---=n u a n x n ,则)(Z X 的收敛域为 。 A.a Z < B.a Z ≤ C.a Z > D.a Z ≥ 3、对)70()(≤≤n n x 和)190()(≤≤n n y 分别作 20 点 DFT ,得)(k X 和)(k Y , 19,1,0),()()( =?=k k Y k X k F ,19,1,0)],([)( ==n k F IDFT n f , n 在 围时,)(n f 是)(n x 和)(n y 的线性卷积。 A.70≤≤n B.197≤≤n C.1912≤≤n D.190≤≤n 4、)()(101n R n x =,)()(72n R n x =,用DFT 计算二者的线性卷积,为使计算量尽可能的少,应使DFT 的长度N 满足 。 A.16>N B.16=N C.16 绪论:本章介绍数字信号处理课程的基本概念 0.1信号、系统与信号处理 1?信号及其分类 信号是信息的载体,以某种函数的形式传递信息。这个函数可以是时间域、频率域或其它域,但最基础的域是时域。 分类: 周期信号/非周期信号 确定信号/随机信号能量信号/功率信号 连续时间信号/离散时间信号/数字信号按自变量与函数值的取值形式不同分类: 2?系统 系统定义为处理(或变换)信号的物理设备,或者说,凡是能将信号加以变换以达到人们要求的各种设备都称为系统。 3. 信号处理 信号处理即是用系统对信号进行某种加工。包括:滤波、分析、变换、综合、压缩、估计、识别等等。所谓“数字信号处理”,就是用数值计算的方法,完成对信号的处理。 0.2数字信号处理系统的基本组成 数字信号处理就是用数值计算的方法对信号进行变换和处理。不仅应用于数字化信号的处理, 而且也可应用于模拟信号的处理。以下讨论模拟信号数字化处理系统框图。 精选 PrF ADC DSP DAC PoF (1)前置滤波器 将输入信号X a(t )中高于某一频率(称折叠频率,等于抽样频率的一半)的分量加以滤除。 (2)A/D变换器 在A/D变换器中每隔T秒(抽样周期)取出一次X a(t)的幅度,抽样后的信号称为离散信号。在A/D 变换器中的保持电路中进一步变换为若干位码。 (3)数字信号处理器(DSP) (4)D/A变换器 按照预定要求,在处理器中将信号序列x(n)进行加工处理得到输出信号y(n)。由一个二进制码流产生一个阶梯波形,是形成模拟信号的第一步。 (5)模拟滤波器 把阶梯波形平滑成预期的模拟信号;以滤除掉不需要的高频分量,生成所需的模拟信号y a(t)。 0.3数字信号处理的特点 (1)灵活性。(2)高精度和高稳定性。(3)便于大规模集成。(4)对数字信号可以存储、运算、系统可以获得高性能指标。 0.4数字信号处理基本学科分支 数字信号处理(DSP)一般有两层含义,一层是广义的理解,为数字信号处理技术 ----- D igitalSignalProcessing 另一层是狭义的理解,为数字信号处理器----- DigitalSignalProcesso。 0.5课程内容 该课程在本科阶段主要介绍以傅里叶变换为基础的“经典”处理方法,包括:(1)离散傅里叶变换及其快速算法。(2)滤波理论(线性时不变离散时间系统,用于分离相加性组合的信号,要求信号 频谱占据不同的频段)。 在研究生阶段相应课程为“现代信号处理”(AdvancedSignalProcessin)信号对象主要是随机信 号,主要内容是自适应滤波(用于分离相加性组合的信号,但频谱占据同一频段)和现代谱估计。 简答题: 1 ?按自变量与函数值的取值形式是否连续信号可以分成哪四种类型? 数字信号处理期末试题及答案汇总 数字信号处理卷一 一、填空题(每空1分, 共10分) 1.序列()sin(3/5)x n n π=的周期为 。 2.线性时不变系统的性质有 律、 律、 律。 3.对4 ()()x n R n =的Z 变换为 ,其收敛域为 。 4.抽样序列的Z 变换与离散傅里叶变换DFT 的关系为 。 5.序列x(n)=(1,-2,0,3;n=0,1,2,3), 圆周左移2位得到的序列为 。 6.设LTI 系统输入为x(n) ,系统单位序列响应为h(n),则系统零状态输出y(n)= 。 7.因果序列x(n),在Z →∞时,X(Z)= 。 二、单项选择题(每题2分, 共20分) 1.δ(n)的Z 变换是 ( )A.1 B.δ(ω) C.2πδ(ω) D.2π 2.序列x 1(n )的长度为4,序列x 2(n )的长度为3,则它们线性卷积的长度是 ( ) A. 3 B. 4 C. 6 D. 7 3.LTI 系统,输入x (n )时,输出y (n );输入 为3x (n-2),输出为 ( ) A. y (n-2) B.3y (n-2) C.3y (n ) D.y (n ) 4.下面描述中最适合离散傅立叶变换DFT 的是 ( ) A.时域为离散序列,频域为连续信号 B.时域为离散周期序列,频域也为离散周期序列 C.时域为离散无限长序列,频域为连续周期信号 D.时域为离散有限长序列,频域也为离散有限长序列 5.若一模拟信号为带限,且对其抽样满足奈奎斯特条件,理想条件下将抽样信号通过即可完全不失真恢复原信号()A.理想低通滤波器 B.理想高通滤波器 C.理想带通滤波器 D.理想带阻滤波器 6.下列哪一个系统是因果系统()A.y(n)=x (n+2) B. y(n)= cos(n+1)x (n) C. y(n)=x (2n) D.y(n)=x (- n) 7.一个线性时不变离散系统稳定的充要条件是其系统函数的收敛域包括()A. 实轴 B.原点C.单位圆 D.虚轴 8.已知序列Z变换的收敛域为|z|>2,则该序列为()A.有限长序列 B.无限长序列C.反因果序列 D.因果序列 9.若序列的长度为M,要能够由频域抽样信号X(k)恢复原序列,而不发生时域混叠现象,则频域抽样点数N需满足的条件是( ) A.N≥M B.N≤M C.N≤2M D.N≥2M 10.设因果稳定的LTI系统的单位抽样响应h(n),在n<0时,h(n)= ( ) 江 苏 大 学 试 题 课程名称 数字信号处理 开课学院 使用班级 考试日期 江苏大学试题第2A页 江苏大学试题第3A 页 江苏大学试题第页 一、填空题:(每空1分,共18分) 8、 数字频率ω是模拟频率Ω对采样频率s f 的归一化,其值是 连续 (连续还是离散?)。 9、 双边序列z 变换的收敛域形状为 圆环或空集 。 10、 某序列的DFT 表达式为∑-== 10 )()(N n kn M W n x k X ,由此可以看出,该序列时域的长度为 N , 变换后数字频域上相邻两个频率样点之间的间隔是 M π 2 。 11、 线性时不变系统离散时间因果系统的系统函数为2 52) 1(8)(22++--=z z z z z H ,则系统的极点为 2,2 1 21-=-=z z ;系统的稳定性为 不稳定 。系统单位冲激响应)(n h 的初值4)0(=h ; 终值)(∞h 不存在 。 12、 如果序列)(n x 是一长度为64点的有限长序列)630(≤≤n ,序列)(n h 是一长度为128点的有限长 序列)1270(≤≤n ,记)()()(n h n x n y *=(线性卷积),则)(n y 为 64+128-1=191点 点的序列,如果采用基FFT 2算法以快速卷积的方式实现线性卷积,则FFT 的点数至少为 256 点。 13、 用冲激响应不变法将一模拟滤波器映射为数字滤波器时,模拟频率Ω与数字频率ω之间的映射变换 关系为T ω = Ω。用双线性变换法将一模拟滤波器映射为数字滤波器时,模拟频率Ω与数字频率ω之 间的映射变换关系为)2tan(2ωT = Ω或)2 arctan(2T Ω=ω。 当线性相位FIR 数字滤波器满足偶对称条件时,其单位冲激响应)(n h 满足的条件为)1()(n N h n h --= , 数字信号处理学习心得 体会 数字信号处理学习心得 一、课程认识和内容理解 《数字信号处理》是我们通信工程和电子类专业的一门重要的专业基础课程,主要任务是研究数字信号处理理论的基本概念和基本分析方法,通过建立数学模型和适当的数学分析处理,来展示这些理论和方法的实际应用。 数字信号处理技术正飞速发展,它不但自成一门学科,更是以不同形式影响和渗透到其他学科:它与国民经济息息相关,与国防建设紧密相连;它影响或改变着我们的生产、生活方式,因此受到人们普遍的关注。信息科学是研究信息的获取、传输、处理和利用的一门科学,信息要用一定形式的信号来表示,才能被传输、处理、存储、显示和利用,可以说,信号是信息的表现形式。这学期数字信号处理所含有的具体内容如下: 第一单元的课程我们深刻理解到时域离散信号和时域离散系统性质和特点;时域离散信号和时域离散系统时域分析方法;模拟信号的数字处理方法。 第二单元的课程我们理解了时域离散信号(序列)的傅立叶变换,时域离散信号Z变换,时域离散系统的频域分析。 第三单元的课程我们学习了离散傅立叶变换定义和性质,离散傅立叶变换应用——快速卷积,频谱分析。 第四单元的课程我们重点理解基 2 FFT算法——时域抽取法﹑频域抽取法,FFT的编程方法,分裂基FFT算法。 第五单元的课程我们学了网络结构的表示方法——信号流图,无限脉冲响 应基本网络结构,有限脉冲响应基本网络结构,时域离散系统状态变量分析法。 第六单元的课程我们理解数字滤波器的基本概念,模拟滤波器的设计,巴特沃斯滤波器的设计,切比雪夫滤波器的设计,脉冲响应不变法设计无限脉冲响应字数字滤波器,双线性变换法设计无限脉冲响应字数字滤波器,数字高通﹑带通﹑带阻滤波器的设计。 第七单元的课程我们学习了线性相位有限脉冲响应(FIR)数字滤波器,窗函数法设计有限脉冲响应(FIR)数字滤波器,频率采样法设计有限脉冲响应(FIR)数字滤波器 二、专业认识和未来规划 通信工程是一门工程学科,主要是在掌握通信基本理论的基础上,运用各种工程方法对通信中的一些实际问题进行处理。通过该专业的学习,可以掌握电话网、广播电视网、互联网等各种通信系统的原理,研究提高信息传送速度的技术,根据实际需要设计新的通信系统,开发可迅速准确地传送各种信息的通信工具等。 对于我们通信专业,我觉得是个很好的专业,现在这个专业很热门,这个专业以后就业的方向也很多,就业面很广。我们毕业以后工作,可以进入设备制造商、运营商、专有服务提供商以及银行等领域工作。当然,就业形势每年都会变化,所以关键还是要看自己。可以从事硬件方面,比如说PCB,别小看这门技术,平时我们在试验时制作的简单,这一技术难点就在于板的层数越多,要做的越稳定就越难,这可是非常有难度的,如果学好了学精了,也是非常好找工作的。也可以从事软件方面,这实际上要我们具备比较好的模电和数电的 1. 两个有限长序列x1(n),0≤n ≤33和x2(n),0≤n ≤36,做线性卷积后结果的长度是 70 , 若对这两个序列做64点循环卷积,则圆周卷积结果中n= 6 至 64 为线性卷积结果。 2. 一线性时不变系统,输入为 x (n )时,输出为y (n ) ;则输入为2x (n )时,输出为 ; 输入为x (n-3)时,输出为 3. 若正弦序列x(n)=sin(30n π/120)是周期的,则周期是N= 8 4. 如果一台计算机的速度为平均每次复乘5μS ,每次复加0.5μS ,用它来计算512 点的DFT[x(n)],问直接计算需要多少时间,用FFT 运算需要多少时间。 1、 直接计算 复乘所需时间 62621510510512 1.31072T N s --=??=??= 复加所需时间()6610.51010.5105125110.130816T N N s --=???-=???= 所以12 1.441536T T T s =+= 2、用FFT 计算 复乘所需时间 66122512510log 510log 5120.0115222 N T N s --=?? =??= 复加所需时间662220.510log 0.510512log 5120.002304T N N s --=??=??= 所以120.013824T T T s =+= 6.设系统差分方程 y(n)=ay(n-1)+x(n) 其中x(n)为输入,y(n)为输出。当边界条件选为y(-1)=0时,是判断系统是否线性的、移不变的 7.用级联型结构实现以下系统函数,试问一共能构成几种级联型网络,并画出其中一种的信号流图。 ()() ()() 22 41 1.41()0.50.90.8Z Z Z H z Z Z Z +-+= -++ 1、一线性时不变系统,输入为x (n)时,输出为y (n);则输入为2x (n)时,输出为2y(n) ;输入为x (n-3)时,输出为y(n-3) ________________________________ 。 2、从奈奎斯特采样定理得出,要使实信号采样后能够不失真还原,采样频率fs与信号最咼频率f max关系为:fS> = 2f max 。 3、已知一个长度为N的序列x(n),它的离散时间傅立叶变换为X(e jw),它的N点 离散傅立叶变换X ( K是关于X (e jw)的_N ________ 点等间隔采样。 4、有限长序列x(n)的8点DFT为X ( K),则X (K) = _________ 。 5、用脉冲响应不变法进行IIR数字滤波器的设计,它的主要缺点是频谱的交叠 所产生的混叠_________ 现象。 6、若数字滤波器的单位脉冲响应h(n)是奇对称的,长度为N,贝陀的对称中心是(N-1)/2_______ 。 7、用窗函数法设计FIR数字滤波器时,加矩形窗比加三角窗时,所设计出的滤波 器的过渡带比较窄,阻带衰减比较小。 8、无限长单位冲激响应(IIR )滤波器的结构上有反馈环路,因此是递归型结构。 9、若正弦序列x(n)=sin(30n n /120)是周期的,则周期是N二8 。 10、用窗函数法设计FIR数字滤波器时,过渡带的宽度不但与窗的类型有关,还与窗的采样点数有关 11、DFT与DFS有密切关系,因为有限长序列可以看成周期序列的主值区间截断,而周期序列可以看成有限长序列的周期延拓。 12、对长度为N的序列x(n)圆周移位m位得到的序列用Xn(n)表示,其数学表达式为x m(n)= x((n-m)) N R(n)。 13、对按时间抽取的基2-FFT流图进行转置,并将输入变输出,输出变输入即可得到按频率抽取的基 2-FFT流图。 14、线性移不变系统的性质有交换率、结合率和分配律。 绪论:本章介绍数字信号处理课程的基本概念。 0.1信号、系统与信号处理 1.信号及其分类 信号是信息的载体,以某种函数的形式传递信息。这个函数可以是时间域、频率域或其它域,但最基础的域是时域。 分类: 周期信号/非周期信号 确定信号/随机信号 能量信号/功率信号 连续时间信号/离散时间信号/数字信号 按自变量与函数值的取值形式不同分类: 2.系统 系统定义为处理(或变换)信号的物理设备,或者说,凡是能将信号加以变换以达到人们要求的各种设备都称为系统。 3.信号处理 信号处理即是用系统对信号进行某种加工。包括:滤波、分析、变换、综合、压缩、估计、识别等等。所谓“数字信号处理”,就是用数值计算的方法,完成对信号的处理。 0.2 数字信号处理系统的基本组成 数字信号处理就是用数值计算的方法对信号进行变换和处理。不仅应用于数字化信号的处理,而且 也可应用于模拟信号的处理。以下讨论模拟信号数字化处理系统框图。 (1)前置滤波器 将输入信号x a(t)中高于某一频率(称折叠频率,等于抽样频率的一半)的分量加以滤除。 (2)A/D变换器 在A/D变换器中每隔T秒(抽样周期)取出一次x a(t)的幅度,抽样后的信号称为离散信号。在A/D 变换器中的保持电路中进一步变换为若干位码。 (3)数字信号处理器(DSP) (4)D/A变换器 按照预定要求,在处理器中将信号序列x(n)进行加工处理得到输出信号y(n)。由一个二进制码流产生一个阶梯波形,是形成模拟信号的第一步。 (5)模拟滤波器 把阶梯波形平滑成预期的模拟信号;以滤除掉不需要的高频分量,生成所需的模拟信号y a(t)。 0.3 数字信号处理的特点 (1)灵活性。(2)高精度和高稳定性。(3)便于大规模集成。(4)对数字信号可以存储、运算、系统可以获得高性能指标。 0.4 数字信号处理基本学科分支 数字信号处理(DSP)一般有两层含义,一层是广义的理解,为数字信号处理技术——DigitalSignalProcessing,另一层是狭义的理解,为数字信号处理器——DigitalSignalProcessor。 0.5 课程内容 该课程在本科阶段主要介绍以傅里叶变换为基础的“经典”处理方法,包括:(1)离散傅里叶变换及其快速算法。(2)滤波理论(线性时不变离散时间系统,用于分离相加性组合的信号,要求信号频谱占据不同的频段)。 在研究生阶段相应课程为“现代信号处理”(AdvancedSignalProcessing)。信号对象主要是随机信号,主要内容是自适应滤波(用于分离相加性组合的信号,但频谱占据同一频段)和现代谱估计。 简答题: 1.按自变量与函数值的取值形式是否连续信号可以分成哪四种类型? 2.相对模拟信号处理,数字信号处理主要有哪些优点? 3.数字信号处理系统的基本组成有哪些? A 一、选择题(每题3分,共5题) 1、 )6 3()(π-=n j e n x ,该序列是 。 A.非周期序列 B.周期6 π = N C.周期π6=N D. 周期π2=N 2、 序列)1()(---=n u a n x n ,则)(Z X 的收敛域为 。 A.a Z < B.a Z ≤ C.a Z > D.a Z ≥ 3、 对)70() (≤≤n n x 和)190()(≤≤n n y 分别作20 点 DFT ,得 )(k X 和)(k Y , 19,1,0),()()( =?=k k Y k X k F ,19,1,0)],([)( ==n k F IDFT n f , n 在 范围内时,)(n f 是)(n x 和)(n y 的线性卷积。 A.70≤≤n B.197≤≤n C.1912≤≤n D.190≤≤n 4、 )()(101n R n x =,)()(72n R n x =,用DFT 计算二者的线性卷积,为使计算量尽可能的少,应使DFT 的长度N 满足 。 A.16>N B.16=N C.16 数字信号处理学习心得 XXX ( XXX学院XXX班) 一、课程认识和内容理解 《数字信号处理》是我们通信工程和电子类专业的一门重要的专业基础课程,主要任务是研究数字信号处理理论的基本概念和基本分析方法,通过建立数学模型和适当的数学分析处理,来展示这些理论和方法的实际应用。 数字信号处理技术正飞速发展,它不但自成一门学科,更是以不同形式影响和渗透到其他学科:它与国民经济息息相关,与国防建设紧密相连;它影响或改变着我们的生产、生活方式,因此受到人们普遍的关注。信息科学是研究信息的获取、传输、处理和利用的一门科学,信息要用一定形式的信号来表示,才能被传输、处理、存储、显示和利用,可以说,信号是信息的表现形式。这学期数字信号处理所含有的具体内容如下: 第一单元的课程我们深刻理解到时域离散信号和时域离散系统性质和特点;时域离散信号和时域离散系统时域分析方法;模拟信号的数字处理方法。 第二单元的课程我们理解了时域离散信号(序列)的傅立叶变换,时域离散信号Z变换,时域离散系统的频域分析。 第三单元的课程我们学习了离散傅立叶变换定义和性质,离散傅立叶变换应用——快速卷积,频谱分析。 第四单元的课程我们重点理解基2 FFT算法——时域抽取法﹑频域抽取法,FFT的编程方法,分裂 基FFT算法。 第五单元的课程我们学了网络结构的表示方法——信号流图,无限脉冲响应基本网络结构,有限脉冲响应基本网络结构,时域离散系统状态变量分析法。 第六单元的课程我们理解数字滤波器的基本概念,模拟滤波器的设计,巴特沃斯滤波器的设计,切比雪夫滤波器的设计,脉冲响应不变法设计无限脉冲响应字数字滤波器,双线性变换法设计无限脉冲响应字数字滤波器,数字高通﹑带通﹑带阻滤波器的设计。 第七单元的课程我们学习了线性相位有限脉冲响应(FIR)数字滤波器,窗函数法设计有限脉冲响应(FIR)数字滤波器,频率采样法设计有限脉冲响应(FIR)数字滤波器 二、专业认识和未来规划 通信工程是一门工程学科,主要是在掌握通信基本理论的基础上,运用各种工程方法对通信中的一些实际问题进行处理。通过该专业的学习,可以掌握电话网、广播电视网、互联网等各种通信系统的原理,研究提高信息传送速度的技术,根据实际需要设计新的通信系统,开发可迅速准确地传送各种信息的通信工具等。 对于我们通信专业,我觉得是个很好的专业,现在这个专业很热门,这个专业以后就业的方向也很多,就业面很广。我们毕业以后工作,可以进入设备制造商、运营商、专有服务提供商以及银行等领域工作。当然,就业形势每年都会变化,所以关键还是要看自己。可以从事硬件方面,比如说PCB,别小看这门技术,平时我们在试验时制作的简单,这一技术难点就在于板的层数字信号处理复习总结-最终版
数字信号处理期末试题及答案汇总
(完整版)数字信号处理试卷及答案
数字信号处理学习心得体会
2017数字信号处理模拟题a答案
数字信号处理》试题库答案
数字信号处理复习总结-最终版
数字信号处理期末试卷及答案
数字信号处理学习心得