步进电机闭环细分驱动控制系统设计_宋鸿飞
步进电机闭环细分驱动控制系统设计
摘要:介绍了螺纹非接触光电测试系统中步进电机闭环细分控制系统的设计,并结合系统要求对抗干扰性和稳定性进行深入研究。文中对步进电机的特性与系统的性能相互关系进行了论述,在此基础上提出了可行的系统设计方案,给出了基于TA8435专用芯片的细分驱动设计电路,对系统抗干扰性和稳定性设计提出了具体解决办法,硬件设计中采用了传感器反馈的全伺服控制方法,软件上采用升频离散化处理,很好的解决了步进电机在高速启停过程中的堵转和丢步现象,提高了系统的稳定性和精度。
关键词:闭环控制;细分驱动;升频离散化
中图分类号:TP216文献标识码:A文章编号:1672-9870(2008)02-00093-03
收稿日期:200716
基金项目:国家863计划资助项目
作者简介:宋鸿飞(1980
角,并依靠电磁力锁定转轴在一定的位置上。因此在定位精度不高的场合下,一般的步进系统都采用开环控制。但由于步进电机固有的低频共振,高频扭矩小引起的失步和机械结构等因素的影响,都会造成实际位移值偏离指令设定值。因此在高定位精度的场合下,没有闭环反馈就无法知道电机是否丢步或过步,系统无法对其进行有效校正和补偿,导致不能准确定位。在步进系统中引入检测环节并对其进行闭环控制,可从根本上解决步进系统的定位精度问题,将使其性能大大提高。步进电机的闭环控制可采用各种不同的方法,其中包括步校验、无传感器反电动势检测和有传感器反馈的全伺服控制。
1系统构成
本电机系统设计应用精密在螺纹非接触光电测试系统中,两相步进电机通过精密滚珠螺杆把电机的轴角运动转化成直线位移运动,带动负载平台及上边安装的测试系统在螺管内部进行直线运动,实现对螺纹的实时检测。由于螺纹检测属于精密检测,对精密位移台的定位精度、速度范围和速度稳定性提出了很高的要求,因此步进电机采用开环控制方式是达不到系统的指标要求的,针对系统的要求步进电机要采用闭环细分控制方式。
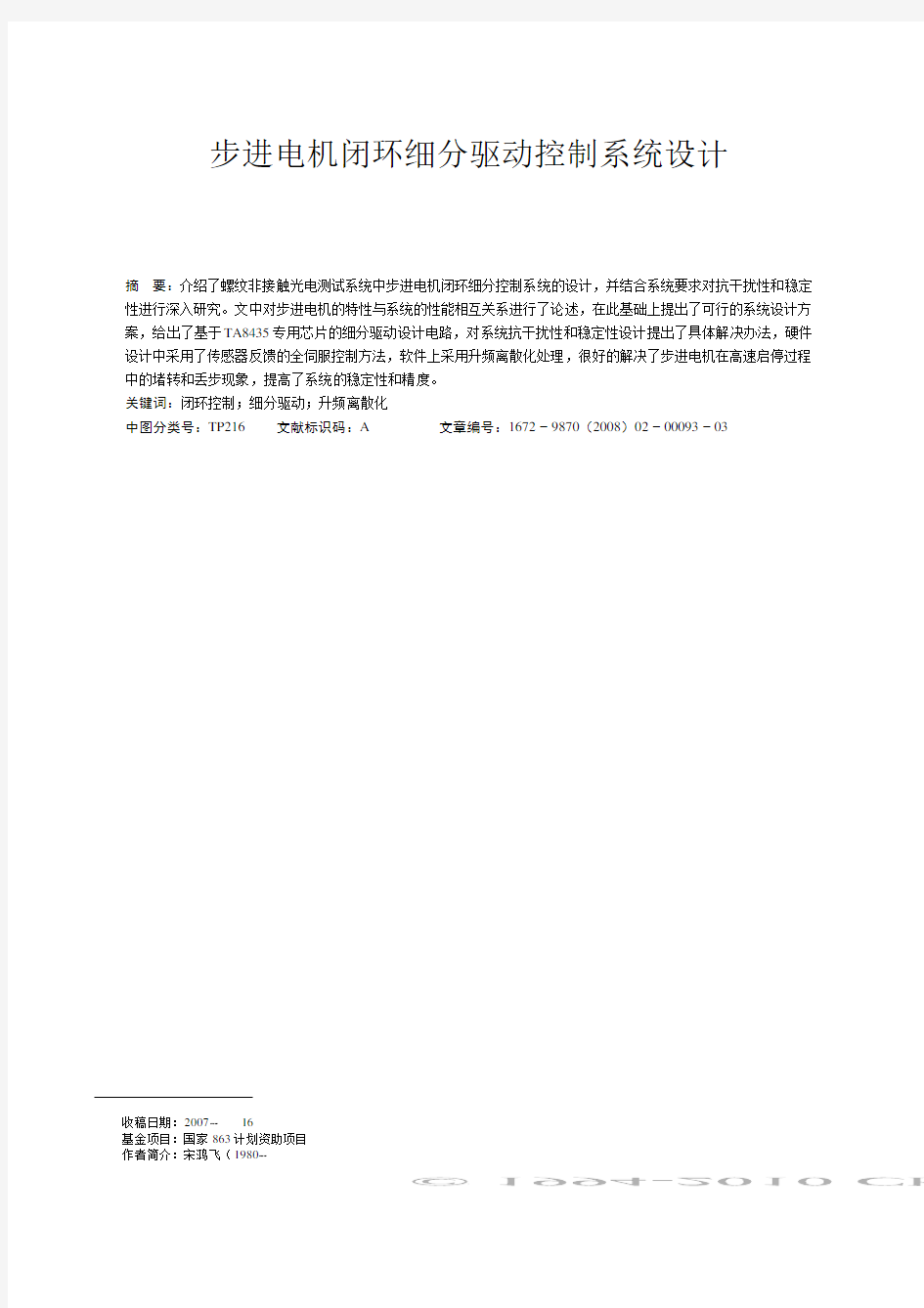
电机控制系统设计采用有传感器反馈的全伺服控制方法。其系统组成包括四部分:(1)使用89S52单片机实现电机控制器设计;(2)电机细分驱动器采用东芝公司生产的TA8435电机驱动专业芯片实现电机细分驱动器的设计;(3)位置反馈传感器采用分辨率
1
图1步进电机闭环细分控制系统功能图
Fig.1Diagram for close-loop subdivision control system func-
tion of stepper motor
2细分驱动器设计
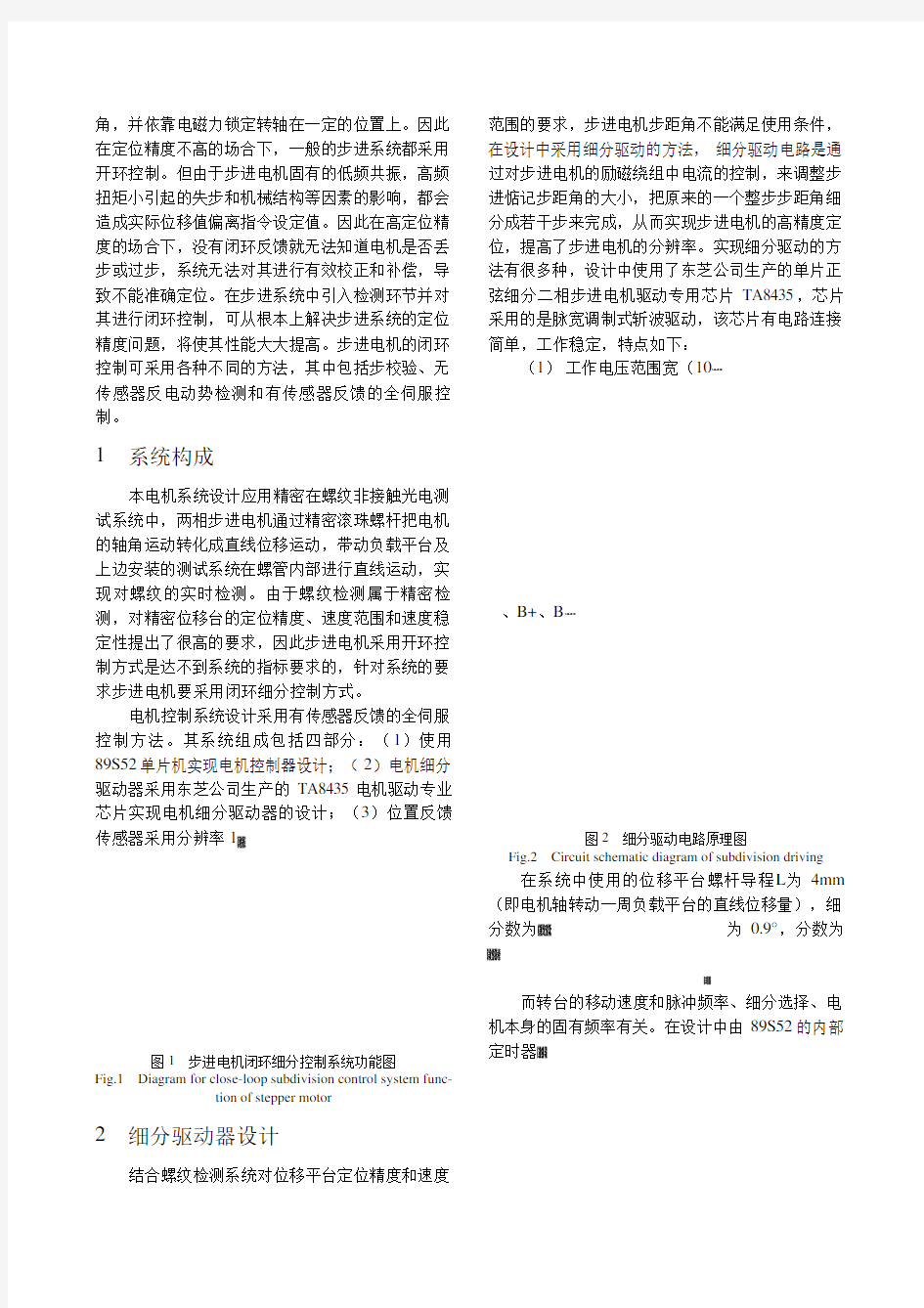
结合螺纹检测系统对位移平台定位精度和速度范围的要求,步进电机步距角不能满足使用条件,在设计中采用细分驱动的方法,细分驱动电路是通过对步进电机的励磁绕组中电流的控制,来调整步进惦记步距角的大小,把原来的一个整步步距角细分成若干步来完成,从而实现步进电机的高精度定位,提高了步进电机的分辨率。实现细分驱动的方法有很多种,设计中使用了东芝公司生产的单片正弦细分二相步进电机驱动专用芯片TA8435,芯片采用的是脉宽调制式斩波驱动,该芯片有电路连接简单,工作稳定,特点如下:
(1)工作电压范围宽(10
、B+、B
图2细分驱动电路原理图
Fig.2Circuit schematic diagram of subdivision driving
在系统中使用的位移平台螺杆导程L为4mm (即电机轴转动一周负载平台的直线位移量),细分数为为0.9°
,分数为
而转台的移动速度和脉冲频率、细分选择、电机本身的固有频率有关。在设计中由89S52的内部
定时器
表1特性数据
Tab.1Character data
位移分辨率
(
4
m光栅尺,把定光栅安装在平台基座的一侧,动光栅和运动的负载平台固定在一起,形成具有检测回路的精密位移平台。
当步进电机转动时,通过螺杆带动平台和负载直线运动,这个过程中定光栅与动光栅相对运动,产生莫尔条纹,使转换电路输出脉冲信号,直接提供给89S52计数器端口,89S52把当前计数值与由键盘或PC机通过串口传来的数据进行比对,监测实际位移值与设定值是否一致,从而实现了位移闭环控制,保证了定位精度的准确性。
与此同时,在软件设计上,使用高优先级定时中断,根据设定速度参数不同,选取不同的时间间隔求平均速度,与设定速度值比较,求出偏差,实时校正运行速度,使平台运行速度稳定,提高螺纹检测系统的检测精度。4抗干扰性和稳定性研究
在工程应用中,系统的稳定性是最为重要的。在本系统设计中只有了解步进电机的使用方法,才能采取合理的抗干扰性措施,使步进电机控制系统可靠的工作。系统中采用了以下抗干扰措施。
由于步进电机的具有电磁特性,对单片机控制电路有电磁干扰,因此在电路设计上采用了光电隔离技术,即在89S52输出的电机控制信号与TA8435电机驱动模块的控制信号输入端之间加入光电耦合期间TLP521_2,实现信号的电电调制,原理图如图3所示。其中在接受和发送两端要做到电气上完全隔离。
图3光电隔离原理图
Fig.3The Schematic of optoelectronic isolate
电源是干扰步进电机控制系统的途径之一,电源干扰主要是通过供电线路的阻抗耦合产生的,各种大功率用电、发电设备是主要的干扰源。基于系统对可靠性的要求较高,在电源输入端加上低通滤波器,吸收掉电源中的大部分"毛刺"。走线上驱动器的I/O线与大功率线分开走线,防止干扰控制线。
软件上采用两种方法进行可靠性设计。一是在程序设计加如软件陷阱,在程序跑飞或死机的情况下,能够自动报警并重新启动。二是程序设计中加入了加减速离散控制算法。由于在实际系统中,时钟脉冲信号变化太快,步进电机由于惯性将跟随不上电信号的变化,这时会出现堵转和失步现象;在停止时由于急剧变化会出现过冲现象,从而影响系统的定位精度。实验证明,在频繁启动和停止时这种现象尤其明显。在设计中当系统启动时,步进电机的运行要经过加速、匀速和减速三个阶段,设定频率超过启动下限频率fn时,系统驱动电机从频率fn开始启动,每间隔时间△t提高频率△f,直到达到设定频率,匀速运行(如图4所示),停止减速过程与启动过程类同。实验验证,经过离散化控制可一定程度的解决步进电机加减速控制中的失步和过冲,在减少噪音的同时提高了定位精度。
(下转第53页)
宋鸿飞,等:步进电机闭环细分驱动控制系统设计
第2期95
2制备工艺
一般地,截止带高反射的要求比较容易实现。
但是对于通带,由于透射率对膜层的相对厚度十分敏感,因此在制备中很难把握,即使一个很小的误差也会引起通带的透射率发生变化。另外,匹配层是这个膜系的敏感层,其误差会引起通带波纹的改变。因此,精确控制膜层厚度是制备滤光片的关键。
实验在GX -900型真空镀膜机上完成。采用晶控监控膜厚[4],电子束蒸发的方法,并辅以霍尔离子源。二氧化钛的蒸发速率为0.2nm/s 。二氧化硅的蒸发速率为0.7nm/s 。分别制备出长波通滤光片和短波通滤光片,并将二者组合,得到测试曲线如图5
。
图5激发滤光片的测试曲线
Fig.5
Measured result of the excitation color filter
从图中可以看出透射率曲线与理论曲线(图2)基本吻合。如果消除零件背面4.25%的反射损失,则可见区的平均反射率达到98%左右,该膜系满足设计要求。
3结论
本文使用等效折射率的概念,采用了一种基于
自动优化的非规整膜层匹配方法,通过加匹配层很好地消除了通带波纹,从理论角度分析了滤光片的设计方法及设计过程,并给出了镀制该膜系的工艺要点。通过测试曲线可以看出,做到了高精度波长定位,并实现了高透射率的要求。
参考文献
[1]顾培夫.薄膜技术[M ].杭州:浙江大学出版社,1990:
103
210.
[3]周九林,尹树百.光学薄膜技术[M ].北京:国防工业出
版社,1974:37.
[4]林永钟,林坚.定值法膜厚监控参数的确定[J ].福建师
范大学学报,1996,12(4):43
20.
熊鹰,等:干涉型激发滤光片的研究
第2期53
(上接第95页)
图4步进电机加速离散化曲线
Fig.4The Curve of accelerated discretization
about step motor
5结论
步进电机闭环细分控制系统可以解决电机失步
和机械平台结构对精密位移平台的定位的影响,满足了系统的精度要求;同时细分驱动方式还可以避免电机低频共振;另外软件离散升频算法的实验,
也一定程度上解决了失步问题。但是由于光栅尺的使用,研制成本增加,因此并不是所有设计中都要使用闭环系统,应根据实际使用需求合理配置。
参考文献
[1]刘宝廷,程树康.步进电动机及其驱动控制系统[M ].哈
尔滨:哈尔滨工业大学出版社,1997.
[2]王玉琳,王强.步进电机的速度调节方法[J ].电机与控
制应用,2006,33(1):53
44.
[4]刘云清,佟首峰.螺纹综合尺寸非接触光电测试系统[J ].
化工自动化及仪表,2005,32(2):61
66.[6]史敬灼,徐殿国,王宗培.混合式步进电动机伺服系统研
究[J ].电工技术学报,2006,21(4):
72
步进电机闭环控制系统方案
几种典型的步进电机闭环控制系统 工业大学 【摘要】系统阐述了步进电动机闭环控制系统的优点,给出了几种典型的闭环控制系统,并提出了步进电动机高精度定位系统的设计思想。 【叙词】步进电机闭环系统/高精度定位 l概述 步进电机是机电一体化产品中的关键元件之一,是一种性能良好的数字化执行元件。它能够将电的脉冲信号转换成相应的角位移,是一种离散型自动化执行元件。随着计算机控制系统的发展,步进电动机广泛应用于同步系统、直线及角位系统、点位系统、连续轨迹控制系统以及其它自动化系统中,是高科技发展的一个重要环节。 2步进电动机闭环系统与开环系统比较[1- 步进电机的主要优点之一是适于开环控制。在开环控制下,步进电动机受具有予定时间间隔的脉冲序列所控制,控制系统中无需反馈传感器和相应的电子线路。这种线路具有简单、费用低的特点,使步进电动机的开环控制系统得以广泛的应用。 但是,步进电机的开环控制无法避免步进电动机本身所固有的缺点,即共振、振荡、失步和难以实现高速。另一方面,开环控制的步进电动机系统的精度要高于分级是很困难的,其定位精度比较低。因此,在精度和稳定性标准要求比较高的系统中,就必须果用闭环控制系统。 步进电动机的闭环控制是采用位置反馈和(或)速度反馈来确定与转子位置相适应的相位转换,可大大改进步进电动机的性能。 在闭环控制的步进电机系统中,或可在具有给定精确度下跟踪和反馈时,扩大工作速度围,或可在给定速度下提高跟踪和定位精度,或可得到极限速度指标和极限精度指标。步进电动机的闭环控制性能与开环控制性能相比,具有如下优点: a.随着输出转矩的增加,二者的速度均以非线性形式下降,但是,闭环控制提高了矩频特性。 b.闭环控制下,输出功率/转矩曲线得以提高,原因是,闭环下,电机励磁转换是以转子位置信息为基础的,电流值决定于电机负载,因此,即使在低速度围,电流也能够充分转换成转矩。 c.闭环控制下,效率一转矩曲线提高。 d.采用闭环控制,可得到比开环控制更高的运行速度,更稳定、更光滑的转速。 e.利用闭环控制,步进电动机可自动地、有效地被加速和减速。 f.闭环控制相对开环控制在快速性方面提高的定量评价,可借助比较Ⅳ步通过某个路径间隔的时间得出: 式中n-步进电动机转换拍数(N>n) g.应用闭环驱动,效率可增到7.8倍,输出功率可增到3.3倍,速度可增到3.6倍。 闭环驱动的步进电机的性能在所有方面均优于开环驱动的步进电动机。步进电机闭环驱动具有步进电动机开环驱动和直流无刷伺服电机的优点。因此,在可靠性要求很高的位置控
步进电机驱动器的主要细分作用
步进电机是一种开环伺服运动系统执行元件,以脉冲方式进行控制,输出角位移。与交流伺服电机及直流伺服电机相比,其突出优点就是价格低廉,并且无积累误差。但是,步进电机运行存在许多不足之处,如低频振荡、噪声大、分辨率不高等,又严重制约了步进电机的应用范围。 通过细分步进电机驱动方式不仅可以减小步进电机的步距角,提高分辨率,而且可以减少或消除低频振动,使电机运行更加平稳均匀。 步进电机驱动器细分的主要作用是提高步进电机的精确率。 国内有一些驱动器采用“平滑”来取代细分,有的亦称为细分,但这不是真正的细分,这两者之间的本质是不同的: 一、 “平滑”并不精确控制电机的相电流,只是把电流的变化率变缓一些,所以“平滑”并不产生微步,而细分的微步是可以用来精确定位的。 二、 步电机系统解决方案
电机的相电流被平滑后,会引起电机力矩的下降,而细分控制不 但不会引起电机力矩的下降,相反,力矩会有所增加。 驱动器细分后的主要优点为:完全消除了电机的低频振荡。低频振荡是步进电机(尤其是反应式电机)的固有特性,而细分是消除它的唯一途径,如果您的步进电机有时要在共振区工作(如走圆弧),选择细分驱动器是唯一的选择。提高了电机的输出转矩。尤其是对三相反应式电机,其力矩比不细分时提高约30-40% 。提高了电机的分辨率。由于减小了步距角、提高了步距的均匀度,‘提高电机的分辨率‘是不言而喻的。 很多用户误以为步进电机驱动器的细分越高,步进电机的精度就越高,其实这是一种错误的观念,比如步进电机驱动器细分较高的可以达到60000个脉冲一转,而步进电机实际是无法分辨这个精度的,当驱动器设置为60000个脉冲/转的时候,步进电机驱动器接受好几个脉冲,步进电机才走一步,这样并不能提高步进电机的精度。 步进电机的细分技术实质上是一种电子阻尼技术,其主要目的是 减弱或消除步进电机的低频振动,提高电机的运转精度只是细分技术 步电机系统解决方案
4、基于FPGA的步进电机细分驱动控制设计
南京工程学院 自动化学院 大作业(论文) 题目:基于FPGA的步进电机细分驱动 控制设计 专业:测控技术与仪器 班级:学号: 学生姓名: 任课教师:郭婧 成绩:
基于FPGA的步进电机细分驱动控制设计 一、基本要求: 在理解步进电机的工作原理以及细分原理的基础上,利用FPGA实现四相步进电机的8细分驱动控制。 二、评分标准: 1、设计方案介绍(共15分) 要求:详细叙述利用FPGA实现对四相步进电机进行8细分控制的设计方案。 评分标准: 13-15分:方案叙述详细,正确; 10-12分:方案叙述较详细,基本正确; 9分以下:酌情给分 0分:抄袭别人 2、VHDL设计部分(60分) 要求:给出详细的VHDL设计过程,提供详细的程序代码,如果设计中用到LPM模块,则给出生成LPM模块的每一步操作流程的截图,并加以文字描述。 评分标准: 54-60分:代码详细,截图完整,书写规范, 48-53分:代码较详细,截图较完整,书写较规范; 47以下:酌情给分 0分:抄袭别人 3、模拟调试部分(20分) 要求:给出详细的仿真过程,对软件编译、仿真分析、仿真波形进行截图。并给出8细分情况下的仿真测试结果,给出详细的实验结果分析。 评分标准: 18-20分:调试过程详细,正确,截图完整; 15-17分:调试过程较详细,基本正确,有截图; 14分以下:酌情给分 0分:抄袭别人
4、提高部分(5分) 要求:利用FPGA实验箱上的步进电机,实现细分控制。 评分标准:根据完成的程度给分。 0分:抄袭别人
参考:实验十八 FPGA步进电机细分驱动控制设计 示例程序和实验指导课件位置:\EDA_BOOK3_FOR_C35\chpt3\EXP18_MOTO\工程:step_a 一、实验目的 学习用FPGA实现步进电机的驱动和细分控制。 二、实验设备 PC机一台 GW48-PK4试验系统一台 连接线若干 三、实验内容 1、建立工程。完成以图18-1为原理图的工程设计,并保存工程名为step_a。 2、编译仿真。对以上工程进行编译,成功后进行方针测试。 3、引脚锁定。引脚锁定参考图18-2. 图18-1 步进电机PWM细分控制控制电路图 图18-2 引脚锁定图 4、下载测试 参考\EDA_BOOK3_FOR_C35\Chpt3\ALl.PPT\实验17.PPT 选择模式5,短路冒接clock0.根据第一章注释分别“38“和”42“或”“7”连接(见GW48主
闭环步进电机与伺服电机对比
伺服电机是被现在的工程师们所推崇和津津乐道的,提到运动控制不谈伺服电机几乎不可想象,工程师们痴迷于伺服电机的闭环控制,沉醉于高响应和高速性及高精度的优点,真正地“三高”。但是,正所谓尺有所短,寸有所长,伺服电机也有它不可避免的如下缺陷: 1. 无法静止:由于采用闭环控制,伺服电机本身结构和电机的特性决定,伺服电机在停止时无法绝对静止,在负载扰动小或者伺服电机的参数调试良好的情况下,伺服电机始终在正负1个脉冲之间波动(可以通过观察伺服驱动器上关于编码器位置的数值,它一直在正负1之间波动)。在图像处理场合这就是一个影响精度的因素。 2. 过冲:在由高速转为低速或者静止时,不可避免地要过冲一段距离,然后在纠正回来。当控制器发一个脉冲给伺服电机时,伺服电机往往不是走一个脉冲,而是走3个脉冲,然后在回退2个脉冲。这对那些需要一个脉冲一个脉冲运动的场合,绝对不允许过冲的场合时致命的。 3. 调试复杂:伺服驱动器内动辄上百个参数,使用说明书几百页,着实让新手发怵;更换一个品牌的伺服电机,也会让老手着实头痛。这也为售后服务和维修带来了大量的工作。 4. 低速蠕动:在低速时伺服电机的运行会出现蠕动或者称之为爬行。 而闭环步进电机就完美地解决了以上问题。 由于闭环步进电机不是简单的给步进电机配一个编码器了事,而是按照伺服电机系统的工作原理进行设计和开发。它采用32位的DSP做为主处理器,以保证整个系统的高响应和高速,可以做到每隔25微秒就可以调整一次电机的电流,标配10000个脉冲/圈的编码器,而且是金属码盘的编码器,既保证了精度,也保证了对环境、温度和振动的高适应性、稳定性和可靠性,甚至优于采用玻璃码盘编码器的伺服电机。 首先,闭环步进电机由于是电机的本体是步进电机,在静止时是绝对静止不动的。
闭环步进电机
STEBRO-S convex CONVEX是韩国最大的伺服生产商。主要客户为三星、LG等韩国具代表性的企业。 CONVEX专注为客户提供高精度、高性价比的解决方案。 在韩国液晶、半导体设备上,其产品得到了广泛应用。 1、闭环步进系统特点: *闭环系统 STEBRO-S是闭环控制系统。安装在电机后面的编码器实时反馈电机转子位置,必要时进行位置补偿,是没有失步现象的伺服系统。 *无需增益调整 普通伺服系统为提高性能,必须进行增益调整。增益调整非常耗时,且跟据负载的不同,还可能会出现各种问题。 STEBRO-S充分利用了步进电机的特点,是无需增益调整的伺服系统。特别是普通伺服系统为之困扰的低刚性负载(例如:同步齿形带等),STEBRO-S是最佳选择。
*由负载情况决定的电流控制 STEBRO-S可以跟据负载情况调整电流,使发热量少,且可以提高效率。 *高速响应(高速定位) STEBRO-S对定位指令具有非常强的跟随性,因此定位时间非常短。在频繁启停的应用中,可显著缩短定位时间。 普通的伺服系统会在定位指令与定位响应之间产生延迟,因此,定位结束指令与定位完成之间需要一定时间,从而增加了整定时间,使定位时间变长。
*平稳、高定位精度 STEBRO-S采用高精度编码器,分辨率为10000ppr。 与以往的步进驱动不同,STEBRO-S采用32位DSP芯片做矢量控制及滤波功能,可以在低速下实现无抖动平稳旋转。 *无抖动 STEBRO-S采用步进电机特性,因此,电机停止时会完全静止,无普通伺服的微振动现象。在使用CCD 等高速检测设备中,STEBRO-S停止时不会产生振动,可充分发挥其性能。
本教程介绍步进电机驱动和细分的工作原理
本教程介绍步进电机驱动和细分的工作原理,以及stm32103为主控芯片制作的一套自平衡的两轮车系统,附带原理图pcb图和源代码,有兴趣的同学一起来吧.本系统还有一些小问题,不当之处希望得到大家的指正. 一.混合式步进电机的结构和驱动原理 电机原理这部分不想讲的太复杂了,拆开一台电机看看就明白了。 电机的转子是一个永磁体,它的上面有若干个磁极SN组成,这些磁极固定的摆放成一定角度。电机的定子是几个串联的线圈构成的磁体。出线一般是四条线标记为A+,A-,B+,B-。A相与B相是不通的,用万用表很容易区分出来,至于各相的+-出线实际是不用考虑的,任意一相正负对调电机将反转。另外一种出线是六条线的只是在A相和B相的中间点做两条引出线别的没什么差别,六出线的电机通过中间出线到A+或A-的电流来模拟正向或负向的电流,可以在没有负相电流控制的电路中实现电机驱动,从而简化驱动电路,但是这种做法任意时刻只有半相有电流,对电机的力矩是有损失的。步进电机的转动也是电磁极与永磁极作用力的结果,只不过电磁极的极性是由驱动电路控制实现的。 我们做这样的一个实验就可以让步进电机转动起来。1找一节电池正负随意接入到A相两端;然后断开;(记为A正向)2再将电池接入到B相两端; 然后断开;(记为B正向)3电池正负对调再次接入A相; 然后断开;(记为A负向)4保持正负对调接入B相;然后断开;(记为B负向)…如此循环你会看到步进电机在缓慢转动。注意电机的相电阻是很小的接
通时近乎短路。我们将相电流的方向记录下来应该为:A+B+A-B-A+…, 如果我们更换接线顺序使得相电流顺序为A+B-A-B+A+…这时我们会看 到电机向反方向运动。这里每切换一次相电流电机都会转动一个很小的角度,这个角度就是电机的步距角。步距角是步进电机的一个固有参数,一般两相电机步距角为1.8度即切换200次可以让电机转动一圈。这里我们比较正反转的电流顺序可以看出A+和A-;B+和B-的交换后的顺序 和正反顺序是一致的,也就是前面所说的”任意一相正负对调电机将反转”。以上为四排工作方式,为了使相电流更加平滑另外可以使用八排的工作方式即: A+;A+B+;B+;B+A-;A-;A-B-;B-;B-A+;从前往后循环正转,从后往前循环反转。 为了用单片机实现相电流的正负流向控制必须要有一个H桥的驱动电路,这种带H桥的驱动模块还是很多的,比较便宜的是晶体管H桥比如L298N,晶体管开关速度比较慢,无法驱动电机高速运动。有些模块将细分控制电路也包含在内,我们也不用这种,因为我们的细分由软件控制。实际应用中使用ST的mos管两桥驱动芯片L6205一片即可驱 动一台步进电机。有了H桥通过PWM就可以控制相电流大小,改变输入极IN1、IN2的状态(参看手册第8页)可以控制相电流的方向。 二.细分的原理和输出控制 从这里开始重点了,别的地方看不到哦。 一个理想的步进电机电流曲线应该是相位相差90度的正弦曲线如
步进电机驱动方式(细分)概述
步进电机驱动方式(细分)概述 众所周知,步进电机的驱动方式有整步,半步,细分驱动。三者即有区别又有联系,目前,市面上很多驱动器支持细分驱动方式。本文主要描述这三种驱动的概述。 如下图是两相步进电机的内部定子示意图,为了使电机的转子能够连续、平稳地转动,定子必须产生一个连续、平均的磁场。因为从宏观上看,电机转子始终跟随电机定子合成的磁场方向。如果定子合成的磁场变化太快,转子跟随不上,这时步进电机就出现失步现象。 既然电机转子是跟随电机定子磁场转动,而电机定子磁场的强度和方向是由定子合成电流决定且成正比。即只要控制电机的定子电流,则可以达到驱动电机的目的。下图是两相步进电机的电流合成示意图。其中Ia是由A-A`相产生,Ib是由B-B`相产生,它们两个合成后产生的电流I就是电机定子的合成电流,它可以代表电机定子产生磁场的大小和方向。 有了以上的步进电机背景描述后,对于步进电机的整步、半步、细分的三种驱动方式,都会是同一种方法,只是电流把一个圆(360°)分割的粗细程序不同。 整步驱动 对于整步驱动方式,电机是走一个整步,如对于一个步进角是3.6°的步进电机,整步驱动是每走一步是走3.6°。
下图是整步驱动方式中,电机定子的电流次序示意图: 由上图可知,整步驱动每一时刻只有一个相通电,所以这种驱动方式的驱动电路可以是很简单,程序代码也是相对容易实现,且由上图可以得到电机整步驱动相序如下: BB’→A’A→B’B→A A’→B B’ 下图是这种驱动方式的电流矢量分割图: 可见,整步驱动方式的电流矢量把一个圆平均分割成四份。 下图是整步驱动方式的A、B相的电流I vs T图: 可以看出,整步驱动描出的正弦波是粗糙的。使用这种方式驱动步进电机,低速时电机会抖动,噪声会比较大。但是,这种驱动方式无论在硬件或软件上都是相对简单,从而驱
步进电机闭环控制系统
步进电机闭环控制系统
几种典型的步进电机闭环控制系统 哈尔滨工业大学 【摘要】系统阐述了步进电动机闭环控制系统的优点,给出了几种典型的闭环控制系统,并提出了步进电动机高精度定位系统的设计思想。【叙词】步进电机闭环系统/高精度定位 l概述 步进电机是机电一体化产品中的关键元件之一,是一种性能良好的数字化执行元件。它能够将电的脉冲信号转换成相应的角位移,是一种离散型自动化执行元件。随着计算机控制系统的发展,步进电动机广泛应用于同步系统、直线及角位系统、点位系统、连续轨迹控制系统以及其它自动化系统中,是高科技发展的一个重要环节。 2步进电动机闭环系统与开环系统比较[1- 步进电机的主要优点之一是适于开环控制。在开环控制下,步进电动机受具有予定时间间隔的脉冲序列所控制,控制系统中无需反馈传感器和相应的电子线路。这种线路具有简单、费用低的特点,使步进电动机的开环控制系统得以广泛的应用。
c.闭环控制下,效率一转矩曲线提高。 d.采用闭环控制,可得到比开环控制更高的运行速度,更稳定、更光滑的转速。 e.利用闭环控制,步进电动机可自动地、有效地被加速和减速。 f.闭环控制相对开环控制在快速性方面提高的定量评价,可借助比较Ⅳ步内通过某个路径间隔的时间得出: 式中n-步进电动机转换拍数(N>n) g.应用闭环驱动,效率可增到7.8倍,输出功率可增到3.3倍,速度可增到3.6倍。 闭环驱动的步进电机的性能在所有方面均优于开环驱动的步进电动机。步进电机闭环驱动具有步进电动机开环驱动和直流无刷伺服电机的优点。因此,在可靠性要求很高的位置控制系统中,闭环控制的步进电动机将获得广泛应用。3编码器形式的步进电动机阕环控制系统步进电机的闭环控制最早是采用编码器的形式,图1是其原理示意图。初始状态,系统受一相或几相激磁而静止。开始工作后,先把目标位置送入减法计数器;然后,“起动”脉冲信号加到
步进电机细分驱动电路设计
前言 随着社会的进步和人民生活水平的不断提高及全球经济一体化势不可挡的浪潮,我国微特电机工业在最近10年得到了快速的发展。快速发展的显着标志是使用领域不断拓宽,用量大增,特别是在日用消费市场和工业自动化装置及系统的表现最为明显。与此同时,随着电力电子技术、微电子技术和计算机技术、新材料以及控制理论和电机本体技术的不断发展进步,用户对电机控制的速度、精度和实时性提出了更高的要求,因此作为微特电机重要分枝的控制电机也得到了空前的发展。步进电动机又称为脉冲电动机,是数字控制系统中的一种执行组件。其功用是将脉冲电信号变换为相应的角位移或直线位移,即给一个脉冲电信号,电动机就转动一个角度或前进一步。步进电机和普通电动机不同之处是步进电机接受脉冲信号的控制。现在比较常用的步进电机包括反应式步进电机、永磁式步进电机、混合式步进电机和单相式步进电机等。其中反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。现阶段,反应式步进电机获得最多的应用。步进电机和普通电机的区别主要在于其脉冲驱动的形式,正是这个特点,步进电机可以和现代的数字控制技术相结合。不过步进电机在控制的精度、速度变化范围、低速性能方面都不如传统的闭环控制的直流伺服电动机。在精度不是需要特别高的场合就可以使用步进电机,步进电机可以发挥其结构简单、可靠性高和成本低的特点。使用恰当的时候,甚至可以和直流伺服电动机性能相媲美。步进电机被广泛应用于数字控制各个领域:机器人方面,机器人的的关节驱动及行进的精确控制,需要步进电机;数控机床方面,如数控电火花切割机床要求刀具精确走步,减小加工件表面的粗糙度的同时提高效率,需要步进电机;办公自动化方面,如电脑磁盘驱动器中的磁盘进行读盘操作的精确位置控制,需要步进电机,在打印机、传真机中也需要步进电机对设备进行位置控制。步进电动机是经济型数控系统经常采用的电机驱动系统。这类电机驱动系统的特点是控制简单,适合计算机系统控制要求。步进电动机的细分驱动系统较以往的电机系统,消除了低频震荡问题,控制分辨率更高,使其应用领域更加广泛。
步进电机细分驱动方式的研究
步进电机作为电磁机械装置,其进给的分辨率取决于细分驱动技术。采用软件细分驱动方式,由于编程的灵活性、通用性,使得步进细分驱动的成本低、效率高,要修改方案也易办到。同时,还可解决步进电机在低速时易出现的低频振动和运行中的噪声等。但单一的软件细分驱动在精度与速度兼顾上会有矛盾,细分的步数越多,精度越高,但步进电机的转动速度却降低;要提高转动速度,细分的步数就得减少。为此,设计了多级细分驱动系统,通过不同的细分档位设定,实现不同步数的细分,同时保证了不同的转动速度。 1 细分驱动原理 步进电机控制中已蕴含了细分的机理。如三相步进电机按A→B→C……的顺序轮流通电,步进电机为整步工作。而按A→AC→C→CB→B→BA→A……的顺序通电,则步进电机为半步工作。以A→B为例,若将各相电流看作是向量,则从整步到半步的变换,就是在IA与IB之间插入过渡向量IAB,因为电流向量的合成方向决定了步进电机合成磁势的方向,而合成磁势的转动角度本身就是步进电机的步进角度。显然,IAB的插入改变了合成磁势的转动大小,使得步进电机的步进角度由θb 变为0.5θb,从而也就实现了2步细分。由此可见,步进电机的细分原理就是通过等角度有规律的插入电流合成向量,从而减小合成磁势转动角度,达到步进电机细分控制的目的。 在三相步进电机的A相与B相之间插入合成向量AB,则实现了2步细分。要再实现4步细分,只需在A与AB之间插入3个向量I1、I2、I3,使得合成磁势的转动角度θ1=θ2=θ3=θ4,就实现了4步细分。但4步细分与2步细分是不同的,由于I1、I2、I33个向量的插入是对电流向量IB的分解,故控制脉冲已变成了阶梯波。细分程度越高,阶梯波越复杂。 在三相步进电机整步工作时,实现2步细分合成磁势转动过程为 IA→IAB→IB;实现4步细分转动过程为IA→I2→IAB……;而实现8步细分则转
步进电机全闭环控制
半导体器件应用网 https://www.360docs.net/doc/872173541.html,/news/194498.html 步进电机全闭环控制 【大比特导读】步进电机由于体积精巧、价格低廉、运行稳定,在低端行业 应用广泛,步进电机运动控制实现全闭环,是工控行业的一大难题。 步进电机由于体积精巧、价格低廉、运行稳定,在低端行业应用广泛,步进电机运动控 制实现全闭环,是工控行业的一大难题。 主要问题有两个,原点的不确定性和失步,目前,采用高速光电开关作为步进系统的原点,这个误差在毫米级,所以在精确控制领域,是不能接受的。另外,为了提高运行精度, 步进系统的驱动采用多细分,有的大于16,假如用在往复运动过程中,误差大的惊人。已 经不能适应加工领域。 为此,提出步进电机全闭环控制系统,以适应目前运动控制领域的需求。 1、硬件连接 硬件连接加装编码器,根据细分要求,采用不同等级的解析度编码器进行实时反馈。 2、原点控制 根据编码器的Z信号,识别、计算坐标原点,同数控系统相同,精度可以达到2/编码器解 析度×4。 3、失步控制 根据编码器的反馈数据,实时调整输出脉冲,根据失步调整程度,采取相应办法。 下图是电路原理 4、电路原理描述
半导体器件应用网 电路采用超大规模电路FPGA,输入、输出可以达到兆级的相应频率,电源3.3V,利用2596 开关电源,将24V转为3.3V,方便实用。输入脉冲与反馈脉冲进行4倍频正交解码后计算,及时修正输出脉冲量和频率。 5、应用描述 本电路有两种模式,返回原点模式和运行模式。当原点使能开关置位时,进入原点模式,反之,进入运行模式。 在原点模式,以同步于输入脉冲的频率输出脉冲,当碰到原点开关后,降低输出脉冲频率,根据编码器的Z信号,识别、计算坐标原点。返回原点完成后,输出信号。此信号及其数据在不断电的情况下,永远保持。 在运行模式,以同步于输入脉冲的频率输出脉冲,同时计算反馈数据,假如出现误差,及时修正。另外,大惯量运行时,加减速设置不合理的情况下,可能会及时反向修正。 6、技术指标 (1)输入输出相应频率:≤1M; (2)脉冲同步时间误差:≤10ms;(主要延误在反向修正,不考虑反向修正,≤10us) (3)重定位电气精度:≥2/编码器解析度×4/马达解析度×细分) (4)重定位原点电气精度≥2/编码器解析度×4/马达解析度×细分) (5)适应PNP,NPN接口 (6)适应伺服脉冲控制 (7)适应各种编码其接口 步进电机运动控制一旦解决上述问题,增加数百元成本的情况下可以实现全闭环控制,毫不逊色于伺服系统。特别是其价格低廉、控制简单、寿命长久的特点在某些场合,可能优于伺服系统。
步进电机驱动器及细分控制原理
步进电机驱动器及细分控制原理 步进电机驱动器原理: 步进电机必须有驱动器和控制器才能正常工作。驱动器的作用是对控制脉冲进行环形分配、功率放大,使步进电机绕组按一定顺序通电。 以两相步进电机为例,当给驱动器一个脉冲信号和一个正方向信号时,驱动器经过环形分配器和功率放大后,给电机绕组通电的顺序为AA BB A A B B ,其四个状态周而复始 进行变化,电机顺时针转动;若方向信号变为负时,通电时序就变为 AA B B A A BB ,电机就逆时针转动。 随着电子技术的发展,功率放大电路由单电压电路、高低压电路发展到现在的斩波电路。其基本原理是:在电机绕组回路中,串联一个电流检测回路,当绕组电流降低到某一下限值时,电流检测回路发出信号,控制高压开关管导通,让高压再次作用在绕组上,使绕组电流重新上升;当电流回升到上限值时,高压电源又自动断开。重复上述过程,使绕组电流的平均值恒定,电流波形的波顶维持在预定数值上,解决了高低压电路在低频段工作时电流下凹的问题,使电机在低频段力矩增大。 步进电机一定时,供给驱动器的电压值对电机性能影响较大,电压越高,步进电机转速越高、加速度越大;在驱动器上一般设有相电流调节开关,相电流设的越大,步进电机转速越高、力距越大。 细分控制原理: 在步进电机步距角不能满足使用要求时,可采用细分驱动器来驱动步进电机。细分驱动器的原理是通过改变A,B相电流的大小,以改变合成磁场的夹角,从而可将一个步距角细分为多步。
定子 A 转子 S N B B B S N A A (a)(b) A S N B B N S B S N A (c)(d) 图3.2步进电机细分原理 图 仍以二相步进电机为例,当A、B相绕组同时通电时,转子将停在A、B相磁极中间,如图3.2。 若通电方向顺序按AA AA BB BB BB AA AA AA BB BB BB AA,8个状态周而 复 始进行变化,电机顺时针转动;电机每转动一步,为45度,8个脉冲电机转一周。与图2.1相比,它的步距角小了一半。 驱动器一般都具有细分功能,常见的细分倍数有:1/2,1/4,1/8,1/16,1/32,1/64;或:1/5,1/10,1/20。 细分后步进电机步距角按下列方法计算:步距角=电机固有步距角/细分数 例如:一台1.8°电机设定为4细分,其步距角为 1.8°/4=0.45°。当细分 等级大于1/4后,电机的定位精度并不能提高,只是电机转动更平稳。
步进电机全闭环控制系统实现技巧
步进电机全闭环控制系统实现技巧 步进电机因体积精巧、价格低廉、运行稳定等优点在各大行业中得到广泛应用。虽然步进电机已被广泛地应用,但是步进电机运动控制实现全闭环控制仍是工控行业的一大难题。 问题主要体现是原点的不确定性和失步现象。目前,采用高速光电开关作为步进系统的原点,这个误差在毫米级,所以在精确控制领域,是不能接受的。另外,为了提高运行精度,步进电机系统的驱动采用多细分,有的大于16,假如用在往复运动过程中,误差大的惊人。已经不能适应加工领域。 为此,提出步进电机全闭环控制系统,以适应目前运动控制领域的需求。 1、硬件连接 硬件连接加装编码器,根据细分要求,采用不同等级的解析度编码器进行实时反馈。 2、原点控制 根据编码器的Z信号,识别、计算坐标原点,同数控系统相同,精度可以达到2/编码器解析度×4。 3、失步控制
根据编码器的反馈数据,实时调整输出脉冲,根据失步调整程度,采取相应办法。 4、电路原理描述 电路采用超大规模电路FPGA,输入、输出可以达到兆级的相应频率,电源3.3V,利用2596开关电源,将24V转为3.3V,方便实用。输入脉冲与反馈脉冲进行4倍频正交解码后计算,及时修正输出脉冲量和频率。 5、应用描述 本电路有两种模式,返回原点模式和运行模式。当原点使能开关置位时,进入原点模式,反之,进入运行模式。 在原点模式,以同步于输入脉冲的频率输出脉冲,当碰到原点开关后,降低输出脉冲频率,根据编码器的Z信号,识别、计算坐标原点。返回原点完成后,输出信号。此信号及其数据在不断电的情况下,永远保持。 在运行模式,以同步于输入脉冲的频率输出脉冲,同时计算反馈数据,假如出现误差,及时修正。另外,大惯量运行时,加减速设置不合理的情况下,可能会及时反向修正。 6、技术指标 (1)输入输出相应频率:≤1M; (2)脉冲同步时间误差:≤10ms;(主要延误在反向修正,不考虑反向修正,≤10us) (3)重定位电气精度:≥2/编码器解析度×4/马达解析度×
基于FPGA的步进电机的PWM控制__细分驱动的实现
姓名___ _ _ _ 学号201016050136 院系电气信息工程学院 专业电子信息工程 班级___信息10-1______ __
目录 目录 (2) 摘要 (3) 关键词 (3) Abstract (3) Keywords (3) 一、引言 (4) 二、步进电机细分驱动的基本原理 (4) 三、Quartus II概述 (5) 四、课题设计 (5) (一)总体设计 (5) (二)细分电流的实现 (6) (三)细分驱动性能的改善 (6) (四)程序设计 (6) 六、仿真与测试结果分析 (10) 七、结论 (12) 参考文献 (12) 注释 (13) 附录 (14) 心得体会 (20)
摘要 在对步进电机细分驱动原理进行分析研究的基础上,提出一种基于FPGA 控制的步进电机细分驱动器。利用FPGA中的嵌入式EAB构成LPM-ROM,存放步进电机各相细分电流所需的PWM控制波形数据表,并通过FPGA设计的数字比较器,同时产生多路PWM电流波形,实现对步进电机转角进行均匀细分控制。实验证明,所研制的步进电机驱动器不仅体积小,简化了系统的设计,减少了延迟,改善了低频特性,有良好的适应性和自保护能力,提高了驱动器的稳定性和可靠性。 关键词 步进电机;细分驱动;脉宽调制;FPGA Abstract In this paper, a divided driving circuit for stepping motor controlled by FPGA is put forward, based on the analysis of the principle of stepping motor divided driving. Using embedded EAB in FPGA to compose LPM-ROM, store PWM control wave form data which stepping motor each phase subdivided driving current is needed.The magnitude comparator designed with FPGA generates several PWM current waveform synchronously, to realize the step angles even division control for three–phase stepping motor.Experimments have proved that the developed subdivision driver is not only smaller,sampler in system, can shorten the delay time,improve the stability in low frequency ,but has good self-adaptation and self-protection ability,and its stability and relibility are higher. Keywords stepping motor; divided driving;PWM; FPGA
闭环步进伺服电机驱动器参数安装图
SS57 闭环步进驱动器功能使用说明 一、产品简介 1.1概述 SS57闭环步进伺服电机驱动器是一能机电全新推出的SS混合伺服系列产品,采用行业最新的Cotex-M4ARM核处理器,主频高达80MHz,使得驱动器对外部响应频率最高可达500KHz,用以适配57闭环步进电机,从而使电机具有高精度,快响应,不失步,停止时绝对静止等优良特性,是当前业内同类产品中特性表现极其优异的一款产品。 1.2闭环步进伺服电机驱动器特点 ◆全新Cotex-M4ARM核技术32位处理器◆主频高达80MHZ ◆电机最高空载运行速度达4000转◆电机响应频率最高达500KHZ以上 ◆输出电流最高达7A◆细分高达25600 ◆输入电压最高75VDC◆双脉冲及脉冲加方向模式切换 ◆报警复位功能◆脉冲,方向,使能兼容5-24V输入 ◆丰富的报警及运行显示讯号◆失步报警输出功能 1.3功能示意图 二、电气、机械和环境指标 2.1闭环步进伺服电机驱动器电气指标 说明项目 SS57 最小值典型值最大值单位
输入电压244875 VDC 驱动电流1-7.0A 输入脉冲频率1-2M Hz 输入脉冲宽度250-5E+8ns 方向信号宽度62.5--μs 输入信号电压 3.6524VDC 输出信号电压--100mA 输出信号电流--30vdc 2.2闭环步进伺服电机驱动器使用环境及参数 冷却方式自然冷却或强制风冷 环境及参数 场合尽量避免粉尘、油雾及腐蚀性气体环境温度-20℃—+40℃ 最高工作温度80℃ 湿度40—90%RH9(不能结露和有水珠)震动 5.9m/s2Max 保存温度-20℃—+50℃ 重量约210克 2.3闭环步进伺服电机驱动器机械安装图 单位:毫米(mm) 图1.安装尺寸图 三、SS57闭环步进驱动器接口和接线介绍 3.1SS57闭环步进驱动器接口与接线示意图
步进电机闭环控制系统
几种典型的步进电机闭环控制系统 哈尔滨工业大学 【摘要】系统阐述了步进电动机闭环控制系统的优点,给出了几种典型的闭环控制系统,并提出了步进电动机高精度定位系统的设计思想。 【叙词】步进电机闭环系统/高精度定位 l概述 步进电机是机电一体化产品中的关键元件之一,是一种性能良好的数字化执行元件。它能够将电的脉冲信号转换成相应的角位移,是一种离散型自动化执行元件。随着计算机控制系统的发展,步进电动机广泛应用于同步系统、直线及角位系统、点位系统、连续轨迹控制系统以及其它自动化系统中,是高科技发展的一个重要环节。 2步进电动机闭环系统与开环系统比较[1- 步进电机的主要优点之一是适于开环控制。在开环控制下,步进电动机受具有予定时间间隔的脉冲序列所控制,控制系统中无需反馈传感器和相应的电子线路。这种线路具有简单、费用低的特点,使步进电动机的开环控制系统得以广泛的应用。 但是,步进电机的开环控制无法避免步进电动机本身所固有的缺点,即共振、振荡、失步和难以实现高速。另一方面,开环控制的步进电动机系统的精度要高于分级是很困难的,其定位精度比较低。因此,在精度和稳定性标准要求比较高的系统中,就必须果用闭环控制系统。 步进电动机的闭环控制是采用位置反馈和(或)速度反馈来确定与转子位置相适应的相位转换,可大大改进步进电动机的性能。 在闭环控制的步进电机系统中,或可在具有给定精确度下跟踪和反馈时,扩大工作速度范围,或可在给定速度下提高跟踪和定位精度,或可得到极限速度指标和极限精度指标。步进电动机的闭环控制性能与开环控制性能相比,具有如下优点: a.随着输出转矩的增加,二者的速度均以非线性形式下降,但是,闭环控制提高了矩频特性。 b.闭环控制下,输出功率/转矩曲线得以提高,原因是,闭环下,电机励磁转换是以转子位置信息为基础的,电流值决定于电机负载,因此,即使在低速度范围内,电流也能够充分转换成转矩。 c.闭环控制下,效率一转矩曲线提高。 d.采用闭环控制,可得到比开环控制更高的运行速度,更稳定、更光滑的转速。 e.利用闭环控制,步进电动机可自动地、有效地被加速和减速。 f.闭环控制相对开环控制在快速性方面提高的定量评价,可借助比较Ⅳ步内通过某个路径间隔的时间得出: 式中n-步进电动机转换拍数(N>n) g.应用闭环驱动,效率可增到7.8倍,输出功率可增到3.3倍,速度可增到3.6倍。 闭环驱动的步进电机的性能在所有方面均优于开环驱动的步进电动机。步进电机闭环驱动具有步进电动机开环驱动和直流无刷伺服电机的优点。因此,在可靠性要求很高的位置控
基于PLC的步进电机控制
2014 ~ 2015 学年第 1 学期 《电气控制及PLC 》课程设计报告 题目:步进电机的PLC控制设计 专业:自动化 班级: 11自动化(1)班 姓名:李勇李亚李新明荆欢 贾伟黄龙飞皇甫趁心 指导教师:江春红 电气工程学院 2014年10月31日
1、任务书
摘要 步进电机可以对旋转角度和转动速度进行高精度控制。步进电机作为制执行元件,是电气自动化的关键产品之一, 广泛应用在各种自动化控制系统和精密机械等领域。例如,在仪器仪表,机床设备以及计算机的外围设备中(如打印机和绘图仪等),凡需要对转角进行精确控制的情况下,使用步进电机最为理想。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。软件PLC综合了计算机和PLC的开关量控制、模拟量控制、数学运算、数值处理、网络通信、PID调节等功能,通过一个多任务控制内核,提供强大的指令集、快速而准确的扫描周期、可靠的操作和可连接各种I/O系统的及网络的开放式结构。用PLC控制步进电机的定位、转向、调速、细分有很大的优势与前景。此次设计是利用PLC 的控制方法,上位机的监控功能,在试验室进行模拟实现的。试验结果达到了预期的功能。 关键词:软PLC;步进电机;上位机;定位;转向;调速;细分
目录 1引言 0 2.方案论证与对比 0 2.1 方案一 0 2.2 方案二 0 2.3 方案对比与选择 (1) 3、系统设计 (1) 3.1 PLC内部原理 (1) 3.2 二相混合式步进电机工作原理 (3) 3.3 驱动器原理 (4) 3.4硬件与软件设计 (4) 4、组态的设计 (6) 4.1 I/O 口的定义 (6) 4.2 构造数据库 (6) 4.3 建立动画连接 (7) 5、系统功能调试与性能分析 (7) 5.1系统调试中的问题及解决方案 (7) 5.1.1软件调试 (7) 5.1.2、正反转未响应 (8) 5.1.3、定位的误差 (8) 5.1.4、组态设计中的问题 (8) 5.1.5、其它 (8) 6、详细仪器清单 (8) 7、总结与致谢 (8) 参考文献 (10) 附录一梯形图 (11) 附录二源程序 (13)
带编码器步进电机和伺服电机之比较
带编码器步进电机和伺服电机之比较 带编码器的步进电机只是提高了一些性能,高精度定位方面是提高了,力矩方面没有得到提升,基本可以忽略,而且照样会丢步。 伺服电机是必须有编码器的,如果一个伺服电机没有编码器,这个电机不可能是伺服电机。 在高精度控制方面,伺服电机才能真正精确定位,步进的是不行的。步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为"步距角",它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 伺服电机与步进电机的性能比较 步进电机作为一种开环控制的系统,和现代数字控制技术有着本质的联系。在目前国内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。为了适应数字控制的发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。虽然两者在控制方式上相似(脉冲串和方向信号),但在使用性能和应用场合上存在着较大的差异。现就二者的使用性能作一比较。 一、控制精度不同 两相混合式步进电机步距角一般为 1.8°、0.9°,五相混合式步进电机步距角一般为0.72 °、0.36°。也有一些高性能的步进电机通过细分后步距角更小。如三洋公司(SANYO DENKI)生产的二相混合式步进电机其步距角可通过拨码开关设置为1.8°、0.9°、0.72°、0.36°、0.18°、0.09°、0.072°、0.036°,兼容了两相和五相混合式步进电机的步距角。
步进电机闭环细分驱动控制系统设计_宋鸿飞
步进电机闭环细分驱动控制系统设计 摘要:介绍了螺纹非接触光电测试系统中步进电机闭环细分控制系统的设计,并结合系统要求对抗干扰性和稳定性进行深入研究。文中对步进电机的特性与系统的性能相互关系进行了论述,在此基础上提出了可行的系统设计方案,给出了基于TA8435专用芯片的细分驱动设计电路,对系统抗干扰性和稳定性设计提出了具体解决办法,硬件设计中采用了传感器反馈的全伺服控制方法,软件上采用升频离散化处理,很好的解决了步进电机在高速启停过程中的堵转和丢步现象,提高了系统的稳定性和精度。 关键词:闭环控制;细分驱动;升频离散化 中图分类号:TP216文献标识码:A文章编号:1672-9870(2008)02-00093-03 收稿日期:200716 基金项目:国家863计划资助项目 作者简介:宋鸿飞(1980
角,并依靠电磁力锁定转轴在一定的位置上。因此在定位精度不高的场合下,一般的步进系统都采用开环控制。但由于步进电机固有的低频共振,高频扭矩小引起的失步和机械结构等因素的影响,都会造成实际位移值偏离指令设定值。因此在高定位精度的场合下,没有闭环反馈就无法知道电机是否丢步或过步,系统无法对其进行有效校正和补偿,导致不能准确定位。在步进系统中引入检测环节并对其进行闭环控制,可从根本上解决步进系统的定位精度问题,将使其性能大大提高。步进电机的闭环控制可采用各种不同的方法,其中包括步校验、无传感器反电动势检测和有传感器反馈的全伺服控制。 1系统构成 本电机系统设计应用精密在螺纹非接触光电测试系统中,两相步进电机通过精密滚珠螺杆把电机的轴角运动转化成直线位移运动,带动负载平台及上边安装的测试系统在螺管内部进行直线运动,实现对螺纹的实时检测。由于螺纹检测属于精密检测,对精密位移台的定位精度、速度范围和速度稳定性提出了很高的要求,因此步进电机采用开环控制方式是达不到系统的指标要求的,针对系统的要求步进电机要采用闭环细分控制方式。 电机控制系统设计采用有传感器反馈的全伺服控制方法。其系统组成包括四部分:(1)使用89S52单片机实现电机控制器设计;(2)电机细分驱动器采用东芝公司生产的TA8435电机驱动专业芯片实现电机细分驱动器的设计;(3)位置反馈传感器采用分辨率 1 图1步进电机闭环细分控制系统功能图 Fig.1Diagram for close-loop subdivision control system func- tion of stepper motor 2细分驱动器设计 结合螺纹检测系统对位移平台定位精度和速度范围的要求,步进电机步距角不能满足使用条件,在设计中采用细分驱动的方法,细分驱动电路是通过对步进电机的励磁绕组中电流的控制,来调整步进惦记步距角的大小,把原来的一个整步步距角细分成若干步来完成,从而实现步进电机的高精度定位,提高了步进电机的分辨率。实现细分驱动的方法有很多种,设计中使用了东芝公司生产的单片正弦细分二相步进电机驱动专用芯片TA8435,芯片采用的是脉宽调制式斩波驱动,该芯片有电路连接简单,工作稳定,特点如下: (1)工作电压范围宽(10 、B+、B 图2细分驱动电路原理图 Fig.2Circuit schematic diagram of subdivision driving 在系统中使用的位移平台螺杆导程L为4mm (即电机轴转动一周负载平台的直线位移量),细分数为为0.9° ,分数为 而转台的移动速度和脉冲频率、细分选择、电机本身的固有频率有关。在设计中由89S52的内部 定时器