SKF 紧凑型倒置滚柱丝杠-SKF compact inverted roller screw

SKF compact inverted roller screw
SKF compact inverted roller screws are designed to pro-vide powerful electromechan-ical actuation where compact-ness and high load capability are prerequisites. In applica-tions such as factory automa-tion, car assembly lines, oil & gas subsea, aerospace, etc., the compact inverted roller screw – incorporated inside an electromechanical actuator –can advantageously replace hydraulic or pneumatic actua-tion, providing the benefits of electronic control.How it works
The compact inverted roller screw works on
the same principle as a planetary roller
screw, with the rollers rotation being syn-
chronized with the threaded shaft through
toothed rings. Either nut or shaft can be ro-
tated by an electric motor, the non-rotating
component thus acting as the push tube of
an actuator. The application loads acting on
the translating push tube transit through
the planetary rollers to the rotating shaft or
nut.
T oothed rings and guiding rings ensure
the rolling motion and the even circumfer-
ential position of the rollers, for perfect load
distribution and for eliminating any parasitic
friction between rollers.
Benefits
Very small lead, down to
1,00 mm,while
providing a high load carrying capacity
High speed
capability
Guiding and sealing functions easily inte-
grated on smooth surface of nut or shaft,
resulting in high performance sealing
Compactness, low weight and reduced
number of parts in overall system
Customized attachment between electric
rotor and screw components, and easy
rotor integration
Screw or nut
directly used as push tube
Long service life, increased reliability im-
proving customer installation productivity
Reduced requirements for electric motor
torque to reach high load actuation
Environmentally friendly solution
The compact inverted roller screw is a solu-
tion provider product for specific applica-
tions where a small lead is required.
SKF – The Knowledge Engineering
Company
knowledge to propose optimized solutions. The compact inverted roller screw works
on the same principle as a planetary roller
screw, with the roller’s rotation being syn-
chronized with the threaded shaft through
toothed rings. Either nut or shaft can be
rotated by an electric motor to allow the
non-rotating component to act as the push
tube of an actuator. The application loads
acting on the translating push tube travel
through the planetary rollers to the rotating
shaft or nut.
T oothed rings and guiding rings ensure
the rolling motion and even circumferential
position of the rollers for perfect load distri-
bution and to eliminate any parasitic friction
between rollers
SKF compact inverted roller screws are designed to pro-vide powerful electromechan-ical actuation where compact-ness and high load capability are prerequisites. In applica-tions such as factory automa-tion, car assembly lines, oil & gas subsea, aerospace, etc., the compact inverted roller screw – incorporated inside an electromechanical actuator – can replace hydraulic or pneumatic actuation, provi-ding the benefits of electronic control.
Compact, low weight and reduced num-ber of parts in overall system
Long service life and increased reliability improve customer installation productivity The compact inverted roller screw is a solu-tion provided for specific applications where a small lead is required.
SKF is the leading supplier of roller screws, and also offers ball screws from miniature dimensions to large sizes. Through our long history of cooperation with industrial equip-ment suppliers, we have developed a unique ability to propose optimized solutions.
?SKF is a registered trademark of the SKF Group.
?SKF Group 2010
The contents of this publication are the copyright of the publisher and may not be reproduced (even extracts) unless prior written permis -sion is granted. Every care has been taken to ensure the accuracy of the information contained in this publication but no liability can be accepted for any loss or damage whether direct, indirect or consequential arising out of the use of the information contained herein.PUB MT/P8 10592 EN · August 2010
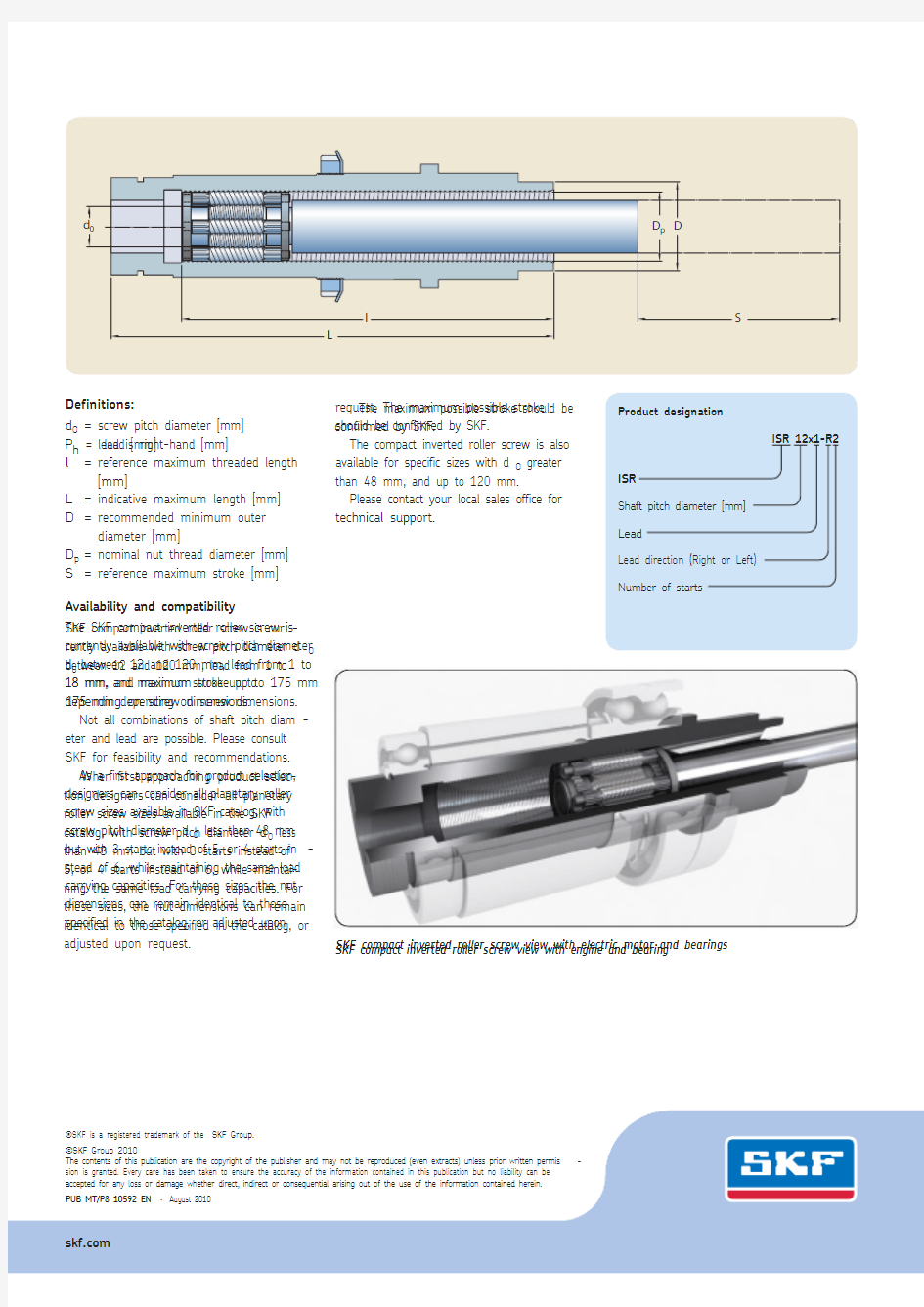
Definitions:
d 0=screw pitch diameter [mm] lead is right-hand [mm]l =referenc
e maximum threaded length
[mm]
L =indicative maximum length [mm]D =recommended minimum outer
diameter [mm]
D p =nominal nut thread diameter [mm]S =reference maximum stroke [mm]Availability and compatibility
SKF compact inverted roller screw is cur -rently available with screw pitch diameter d 0between 12 and 120 mm, lead from 1 to 18 mm, and maximum stroke up to
175 mm depending on screw dimensions.Not all combinations of shaft pitch diam -eter and lead are possible. Please consult SKF for feasibility and recommendations.As a first approach for product selection, designers can consider all planetary roller screw sizes available in SKF catalog, with screw pitch diameter d 0 less than 48 mm but with 3 starts instead of 5, or 4 starts in -stead of 6, while maintaining the same load carrying capacities. For these sizes, the nut dimensions can remain identical to those specified in the catalog, or adjusted upon request. The maximum possible stroke should be confirmed by SKF.The compact inverted roller screw is also available for specific sizes with d 0 greater than 48 mm, and up to 120 mm.
Please contact your local sales office for technical support.
SKF compact inverted roller screw view with engine and bearing
https://www.360docs.net/doc/8013774406.html,
P
h = lead [mm]The SKF compact inverted roller screw is currently available with screw pitch diameter d 0 between 12 and 120 mm, lead from 1 to 18 mm, and maximum stroke up to 175 mm depending on screw dimensions.
When ?rst approaching product selec-tion, designers can consider all planetary roller screw sizes available in the SKF catalog, with screw pitch diameter d 0 less than 48 mm but with 3 starts instead of 5, or 4 starts instead of 6, while maintai-ning the same load carrying capacities. For these sizes, the nut dimensions can remain identical t o those speci?ed in the catalog, or adjusted upon request.
The maximum possible stroke should be
c on?rme
d by SKF.
SKF compact inverted roller screw view with electric motor and bearings
滚珠丝杠副参数计算与选用
滚珠丝杠副参数计算与选用1、计算步骤
2、确定滚珠丝杠导程Ph 根据工作台最高移动速度Vmax , 电机最高转速nmax, 传动比等确定Ph。按下式计算,取较大圆整值。
Ph=(电机与滚珠丝杠副直联时,i=1) 3、滚珠丝杠副载荷及转速计算 这里的载荷及转速,是指滚珠丝杠的当量载荷Fm与当量转速nm。滚珠丝杠副在n1、n2、n3······nn转速下,各转速工作时间占总时间的百分比t1%、t2%、t3%······tn%,所受载荷分别是F1、F2、F3······Fn。 当负荷与转速接近正比变化时,各种转速使用机会均等,可按下列公式计算: (nmax: 最大转速,nmin: 最小转速,Fmax: 最大载荷(切削时),Fmin: 最小载荷(空载时) 4、确定预期额定动载荷 ①按滚珠丝杠副预期工作时间Ln(小时)计算: ②按滚珠丝杠副预期运行距离Ls(千米)计算: ③有预加负荷的滚珠丝杠副还需按最大轴向负荷Fmax计算:Cam=feFmax(N) 式中: Ln-预期工作时间(小时,见表5) Ls-预期运行距离(km),一般取250km。 fa-精度系数。根据初定的精度等级(见表6)选。 fc-可靠性系数。一般情况fc=1。在重要场合,要求一组同样的滚珠丝杠副在同样条件下使用寿命超过希望寿命的90%以上时fc见表7选
fw-负荷系数。根据负荷性质(见表8)选。 fe-预加负荷系数。(见表9) 表-5 各类机械预期工作时间Ln表-6 精度系数fa 机械类型 Ln(小时) 普通机械5000~10000 普通机床10000~20000 数控机床20000 精密机床20000 测示机械15000 航空机械1000 精度等 级 1.2.3 4.5 7 10 fa 1.0 0.9 0.8 0.7 表-7 可靠性系数fc 可靠性% 90 95 96 97 98 99 fc 1 0.62 0.53 0.44 0.33 0.21 表-8 负荷性质系数fw 负荷性 质 无冲击(很平 稳) 轻微冲击伴有冲击或振动fw 1~1.2 1.2~1.5 1.5~2 表-9 预加负荷系数fe 预加负荷类型轻预载中预载重预载fe 6.7 4.5 3.4 以上三种计算结果中,取较大值为滚珠丝杠副的Camm。 5、按精度要求确定允许的滚珠丝杠最小螺纹底d2m a.滚珠丝杠副安装方式为一端固定,一端自由或游动时(见图-5) 式中:E-杨氏弹性模量21×105N/mm2 dm-估算的滚珠丝杠最大允许轴向变形量(mm)
滚珠丝杆传动优点
滚珠丝杆传动机构的性能和特点 滚珠丝杠由螺杆、螺母、钢球、预压片、反向器、防尘器组成。是将回转运动转化为直线运动,或将直线运动转化为回转运动的理想的产品。当滚珠丝杠作为主动 体时,螺母就会随丝杆的转动角度按照对应规格的导程转化成直线运动,被动工件可以通过螺母座和螺母连接,从而实现对应的直线运动。 常用的循环方式有两种:外循环和内循环。与丝杠脱离接触的称为外循环。外循环是滚珠在循环过程结束后通过螺母外表面的螺旋槽或插管返回丝杠螺母间重新进入循环。外循环滚珠丝杠外循环结构和制造工艺简单,使用广泛。;始终与丝杠保持接触的称为内循环。内循环均采用反向器实现滚珠循环。传动机构的性能 与滑动丝杠副相比驱动力矩为1/3 由于滚珠丝杠副的丝杠轴与丝杠螺母之间有很多滚珠在做滚动运动,所以能得到较高的运动效率。与过去的滑动丝杠副相比驱动力矩达到 1/3以下,即达到同样运动结果所需的动力为使用滚动丝杠副的1/3。在省电方面很有帮助。传动效率高 滚珠丝杠副的传动效率高达90%~98%,为滑动丝杠副的2~4倍,能高效地将扭力转化为推力,或将推力转化为扭力。传动灵敏平稳 滚珠丝杠副为点接触滚动摩擦,摩擦阻力小、灵敏度好、启动时无颤动、低速时无爬行,可μ级控制微量进给。定位精度高 滚珠丝杠副传动过程中温升小、可预紧消除轴向游隙和初级弹性形变、
可对丝杠进行预拉伸以补偿热伸长,故可获得较高的定位精度和重复定位精度。精度保持性好 滚珠及滚道硬度达HRC58~63,滚道形状准确,滚动摩擦磨损极小,具有良好的精度保持性、可靠性和使用寿命。传动刚度高 滚珠丝杠副内外滚道均为偏心转角双圆弧面、在滚道间隙极小的时也能灵活传动。需要时加一定的预紧载荷则可消除轴向游隙和初级弹性形变以获得良好的刚性(此时使用寿命有所减少)。同步性能好 滚珠丝杠副因具有导程精度高、灵敏度好的特点,在需要同步传动的场合,用几套相同导程的滚珠丝杠副可获得良好的同步性能。无侧隙、刚性高 滚珠丝杠副可以加予压,由于予压力可使轴向间隙达到负值,进而得到较高的刚性(滚珠丝杠内通过给滚珠加予压力,在实际用于机械装置等时,由于滚珠的斥力可使丝母部的刚性增强)。高速进给可能 滚珠丝杠由于运动效率高、发热小、所以可实现高速进给(运动)。 滚珠丝杠副可用润滑来提高耐磨性及传动效率。润滑剂分为润滑油及润滑脂两大类。润滑油用机油、90~180号透平油或140号主轴油。润滑脂可采用锂基油脂。润滑脂加在螺纹滚道和安装螺母的壳体空间内,而润滑油通过壳体上的油孔注入螺母空间内。
滚珠丝杠的设计与计算
一、滚珠丝杠的特长 1、1驱动扭矩仅为滑动丝杠的1/3 滚珠丝杠是滚珠丝杠与螺母间的螺纹沟槽做滚动运动,因此可获得高效率,与过去的滑动丝杠相比,驱动扭矩仅为1/3以下(图1与2)。从而,不仅可将旋转运动变为直线运动,而且可以容易地将直线运动变成旋转运动。 图1:正效率(旋转→直线)图2:反效率(直线→旋转) 1、1、1导程角的计算法 ……………………………………( 1 ) β:导程角(度) d p:滚珠中心直径(mm) ρh:进给丝杠的导程(mm)
1、12推力与扭矩的关系 当施加推力或扭矩时,所产生的扭矩或推力可用(2)~(4)式计算。(1)获得所需推力的驱动扭矩 T:驱动扭矩 Fa:导向面的摩擦阻力 Fa=μ×mg μ:导向面的摩擦系数 g:重力加速度( 9.8m/s2) m:运送物的质量( kg ) ρh:进给丝杠的导程( mm ) η:进给丝杠的正效率(图1) (2)施加扭矩时产生的推力 Fa:产生的推力( N ) T:驱动扭矩(N mm ) ρh:进给丝杠的导程( mm ) η:进给丝杠的正效率(图1)
(3)施加推力时产生的扭矩 T:驱动扭矩(N mm ) Fa:产生的推力( N ) ρh:进给丝杠的导程( mm ) η:进给丝杠的正效率(图2) 1、1、3驱动扭矩的计算例 用有效直径是:32mm,导程:10mm(导程角:5O41’的丝杠,运送质量为500Kg的物体,其所需的扭矩如下 (1)滚动导向(μ=0.003) 滚珠丝杠及(μ=0.003,效率η=0.96) 导向面的摩擦阻力 Fa=0.003×500×9.8=14.7N 驱动扭矩 (2)滚动导向(μ=0.003) 滚珠丝杠及(μ=0.2,效率η=0.32)
滚珠丝杆的应用和特点
滚珠丝杆的应用和特点 所谓滚珠丝杆其实就是将回转运动转化成为了直线运动,或者将直线运动慢慢的转化为回转运动的理想的产品。滚珠丝杆由螺杆、螺母和滚珠组成。它的主要功能就是将旋转运动转化成直线运动,而这个也是滚珠螺丝的进一步延伸以及发展,而这项发展的重要意义就是将轴承从滚动动作慢慢的变成滑动的动作。由于具有很小的摩擦阻力,因此滚珠丝杆常被用于应用于各种工业设备和精密仪器。那么滚珠丝杆都具备哪些特点呢: 1、高精度的保证 滚珠丝杆是采用的日本制造的世界最高水平的机械设备连贯生产出来的,尤其是它在组装、研削、检查等各个工序的工厂环境方面,,同时还能够对温度?湿度都进行非常严格的控制,而且还具备完善的品质管理体制,进而能够让精度得到充分的保证。 2、与滑动丝杠副相比它的驱动力矩是1/3 由于滚珠丝杆副的丝杠轴和丝母之间还拥有很多滚珠在做滚动的运动,因此它就能够能较高的运动效率。而这个和过去的滑动丝杠副相比来说,驱动力矩达到1/3以下,同样也能够达到同样的运动结果,而所需的动力仅仅只是使用滚动丝杠副的1/3。因此它在省电方面非常有帮助。 滚珠的循环方式 按照滚珠在整个循环过程中与丝杠表面的接触情况,滚珠的循环方式可分为外循环和内循环两种。 (1)外循环 外循环就是滚珠在循环过程中,不能始终保持与丝杠表面接触,即当滚珠从螺纹滚道终端反向到滚道始端时与丝杠表面脱离接触。外循环又可以分为:插管式、螺旋槽式和端盖式三种。外循环结构制造工艺简单,承载能力较高,但管道焊接处难以做到平滑,影响滚珠滚动的平稳性,甚至发生卡珠想象,外形尺寸大,噪声也较大,耐磨性差。内循环结构通过反向器组成滚珠循环回路,每一个反向器组成一圈滚珠链,因此承载能力小,在高速时滚珠的流畅性较差,适应于微型滚珠丝杆副与普通滚珠丝杠副,但螺母尺寸比较小。 (2)内循环
从啮合原理上浅析行星滚柱丝杠
研究意义: 行星滚柱丝杠作为一种新型的传动装置,具有摩擦小、效率高、寿命长、体积小、承载能力强等特点,被广泛的应用于精密仪器、数控机床、武器装备、工业机器人、医疗器械的制造和航空航天等领域。 性能优势: 滚柱丝杠与滚珠丝杠的传动原理类似,但是用螺纹滚柱代替了滚珠丝杠中的滚珠作为丝杠和螺母之间的传动体,增加了接触点的数量,所以比滚珠丝杠具有更优越的性能。 行星滚柱丝杠的中心丝杠与螺母分别与滚柱啮合,在滚柱与丝杠和螺母螺旋升角相同的情况下,传动过程中没有相对滑动,与滚柱丝杠副一样,各部件之间的摩擦都为滚动摩擦,将大大减小传动摩擦阻力,传动效率将得到很大提高,传动部件经过表面工艺处理后,滚动摩擦产生的磨损极小,因此将大大提高使用寿命。(滚动摩擦的优点、与滚珠丝杠共有) 滚柱丝杠副较滚珠丝杠副有更多的接触点,可以提供更高的额定动载和静载,并且接触点的增多将大幅提高刚度和抗冲击能力。在相同载荷条件下,滚柱丝杠相对于滚珠丝杠占用更小的空间,并且使用寿命延长了10倍以上。(多接触点的优点) 滚柱丝杠副的螺纹滚柱两端通过齿轮啮合,这可以保证滚柱与丝杠和螺母间啮合传动的同步性,避免个别滚柱打滑造成干涉。这种滚柱周向相对固定的结构使得滚柱丝杠相对滚珠丝杠可以提供更大的速度和加速度。(滚柱周向相对固定优点) 由于滚柱丝杠用螺纹滚柱代替了滚柱,克服了滚珠直径对传动机构的限制。由于没有了滚柱直径的限制,滚柱丝杠可以采用比滚珠丝杠更小的导程,实现在小导程下的高速传动,振动小,噪音低。丝杠是小导程角的非圆弧螺纹,有利于提高导程精度,实现精密微进给,提高传动精度。(小导程的优点) 应用前景: 行星滚柱丝杠以上诸多优点给其带来了广阔的应用前景。滚柱丝杠具有较高承载能力和较快速度,除了可以代替梯形丝杠,滚珠丝杠外,在一定情况下可以代替气缸和液压缸的作用。其配置简单,不需要诸如阀门、泵、过滤器、传感器
滚珠丝杠设计计算
HJG-S系列滚珠丝杠副的主要性能选择 1 、轴向载荷、寿命 (1)、额定动载荷 Ca 一批相同的滚珠丝杠副 , 在轴向载荷 Fa 的作用力以较高的速度运转 10 ° 转 , 其 90% 的滚珠丝杠副不产生疲劳剥伤 , 此时的轴向载荷 Fa 称为该规格的额定动载荷 (Ca), 此值可在 HJG-S 具体尺寸规格表中查得。 (2)、额定静载荷 Cao Cao 系指滚珠丝杠副在静止(或转速较低)状态下,承受最大接触应力的滚珠和滚道接触面的塑性变形量之和为钢球直径的万分之一时的轴向载荷,此值可在 HJG-S 具体尺寸规格表中查得。 (3)、回转寿命 L 式中: L---- 加转命令: Ca---- 额定动载荷( N ): Fa---- 轴向载荷( N ): Fw---- 载荷系数。 无冲击载荷平滑运动时 Fw=1.0-1.2 普通运动时 Fw=1.2-1.5 冲击振动时 Fw=1.-2.5 (4) 、时间寿命 Lh 式中: Lh---- 时间寿命; L---- 回转寿命; n---- 转速(转 / 分) 2 、按预期工作时间确定预期额定动载荷 Cam 式中: Lh---- 预期工作时间(小时)见表 a ; fa---- 精度系数见表 b ; fc---- 可靠性系数一般 fc=1 ; fw---- 负荷系数见表 c 。 ---- 当量转速(转 / 分) Fm---- 表示当量载荷( N ) 表 a 各类机械预期工作时间 Lh (小时)
机械类型 工作时间 普通机床 5000—10000 普通机床 10000—15000 数控机床 20000 精密机床 20000 测试机床 15000 航空机械 1000 表b 精度系数 1.2.3 4.5 7 10 fa 1.0 0.9 0.8 0.8 表c 负荷系数 无冲击、平稳 轻微冲击 伴有冲击、振动 fw 1—1.2 1.2—1.5 1.5—2 3、滚珠丝杠副的预加负荷 (1)、滚珠丝杠、螺母间的预加负荷FP 为了消除轴向间隙,增加滚珠丝杠副的刚性和定位精度,在丝杠螺母间加以预加负荷FP。过大的FP值将引起滚珠丝杠副寿命下降及摩擦力矩增大,而FP过小,会出现轴向间隙,影响定位精度,因此在一般情况下: 取 Fp=Fm/3 试中:Fp---预加载荷;Fm---当量载荷(N);当轴向载荷不能确定时取Fp=Ca/(8-10) (2)、对预拉但滚珠丝杠副的行程补偿值C和预拉伸力FPL 为补偿因工作温度升高而引起的丝杠伸长,保证滚珠丝杠在正常使用时的定位精度和滚珠丝杠的系统刚度要求较高的高精度滚珠丝杠副,其丝杠轴需进行预加负荷拉伸。一般下列方法实现。 1 )、滚珠丝杠轴在制造时,可提出目标行程的行程补偿值 C C=a. △ t.Lu=11.8 △ tLu. 式中: C ---- 行程补尝值( um );△ t ---- 温度变化值。一般取 2 ℃—3℃;Lu----滚珠丝杠副的有效行程(mm); a----丝杠的线膨胀系数11.8× /度 2)、滚珠丝杠副安装时丝杠的拉伸力Fpl 式中:Fpl----预拉伸力(N);△ t ----滚珠丝杠的温升,一般为2-3;d2----滚珠丝杠螺纹底径(mm); E----杨氏弹性模量:2.1x105N/mm2 4、滚珠丝杠副的极限转速与允许转速 滚珠丝杠副的极限转速主要是指滚珠丝杠副在高速运转时,避免产生共振现象,使滚珠丝杠副正常运转。 式中:----极限转速(转速/分);K----安全系数,一般取0.8;Lb----安装间距;
滚珠丝杠螺母副的结构简图
滚珠丝杠螺母副结构图及其工作原理本次观察了实训车间的数控车床、数控铣床、加工中心,作为它们进给伺服 系统机械传动结构中的滚珠丝杠螺母副的结构都是一样的。 滚珠丝杠螺母副的结构原理图 ·组成:主要由丝杆、螺母、滚珠和滚道(回珠器)、螺母座等组成。 ·工作原理:在丝杆和螺母上加工有弧行螺旋槽,当它们套装在一起时便形成螺旋滚道,并在滚道内装满滚珠。而滚珠则沿滚道滚动,并经回珠管作周而复始的循环运动。回珠管两端还起挡珠的作用,以防滚珠沿滚道掉出。 特点: ·传动效率高:机械效率可高达92%~98%。 ·摩擦力小:主要是用滚珠的滚动代替了普通丝杆螺母副的滑动。 ·轴向间隙可消除:也是由于滚珠的作用,提高了系统的刚性。经预紧后可消除间隙。 ·使用寿命长、制造成本高:主要采用优质合金材料,表面经热处理后获得高的硬度。 滚珠丝杠螺母副的滚珠循环方式有两种:滚珠在循环过程中有时与丝杠脱离接触的成为外循环(如图b),始终与丝杠保持接触的成为内循环(如图a)。 (a) 内循环(b)外循环 (1)外循环外循环是常用的一种外循环方式。这种结构是在螺母体上轴向相隔数个半导程处钻两个孔与螺旋槽相切,作为滚珠的进口与出口。再在螺母的外表面上铣出回珠槽并沟通两孔。另外,在螺母内进出口处各装一挡珠器,并在螺母外表面装一套筒,这样构成封闭的循环滚道。外循环结构制造工艺简单,使用较广泛。其缺点是滚道接缝处很难做得平滑,影响滚珠滚动的平稳性,甚至发生卡珠现象,噪声也较大。 (2)内循环内循环均采用反向器实现滚珠循环,数控机床反向器有两种型式。圆柱凸键反向器,反向器的圆柱部分嵌入螺母内,端部开有反向槽。反向槽靠圆柱外圆面及其上端的凸键定位,以保证对准螺纹滚道方问。扁圆镶块反向器,反向器为一半圆头平键形镶块,镶块嵌入螺母的切槽中,其端部开有反向槽。两种反向器比较,后者尺寸较小,从而减小了螺母的栏手向尺寸及缩短了轴向尺寸。
滚珠丝杠螺母副的计算和选型
Δ3 一、进给传动部件的计算和选型 进给传动部件的计算和选型主要包括:确定脉冲当量、计算切削力、选择滚珠丝杠螺母副、计算减速器、选择步进电机等。 1、脉冲当量的确定 根据设计任务的要求,X方向的脉冲当量为δx=0.005mm/脉冲,Z 方向为δz=0.01mm/脉冲。 2、切削力的计算 切削力的分析和计算过程如下: 设工件材料为碳素结构钢,σb=650Mpa;选用刀具材料为硬质合金YT15;刀具几何参数为:主偏角κr=60°,前角γo=10°,刃倾角λs=-5°;切削用量为:背吃刀量a p=3mm,进给量f=0.6mm/r,切削速度vc=105m/min。 查表得:C Fc=2795,x Fc=1.0,y Fc=0.75,n Fc=-0.15。 查表得:主偏角κr的修正系数kκrFc=0.94;刃倾角、前角和刀尖圆弧半径的修正系数均为1.0。 由经验公式(3—2),算得主切削力F c=2673.4N。由经验公式F c:F f: F p=1:0.35:0.4,算得进给切削力F f=935.69N,背向力F p=1069.36N。 3、滚珠丝杠螺母副的计算和选型 (1)工作载荷F m的计算 已知移动部件总重G=1300N;车削力F c=2673.4N,F p=1069.36N,F f=935.69N。根据F z=F c,F y=F p,F x=F f的对应关系,可得:F z=2673.4N,F y=1069.36N,F x=935.69N。 选用矩形—三角形组合滑动导轨,查表,取K=1.15,μ=0.16,代入F m=KF x+μ(F z+G),得工作载荷F m=1712N。 (2)最大动载荷F Q的计算 设本车床Z向在最大切削力条件下最快的进给速度v=0.8m/min,初选丝杠基本导程P h=6mm,则此时丝杠转速n=1000v/P h=133r/min。取滚珠丝杠的使用寿命T=15000h,代入L0=60nT/106,得丝杠系数
滚珠丝杠副
目录 滚珠丝杠副 (2) 浮动式反向器的内循环滚珠丝杠副 (2) 滚珠丝杠副的主要尺寸参数 (3) 滚珠丝杠副的精度等级及标注方法 (3) 滚珠丝杠副轴向间隙的调整与预紧 (4) 轴承的组合安装支承示例 (7) (1)简易单推-单推式支承 (7) (2)双推-简支支承方式 (8) (3)双推-自由式支承 (8) 滚珠丝杠副制动装置与润滑 (8) 滚珠丝杠副的选择方法 (10)
i 滚珠丝杠副 滚珠丝杠螺母机构由反向器(滚珠循环反向装置)l、螺母2、丝杠3和滚珠4等四部分组成。 滚珠丝杠副与滑动丝杠副相比,滚珠丝杠副除上述优点外,还具有轴向刚度高(即通过适当预紧可消除丝杠与螺母之间的轴向间隙)、运动平稳、传动精度高、不易磨损、使用寿命长等优点。但由于不能自锁,具有传动的可逆性,在用做升降传动机构时,需要采取制动措施。 浮动式反向器的内循环滚珠丝杠副 浮动式反向器的内循环滚珠丝杠副(如下图所示)的结构特点是反向器l上的安装孔有0.01~0.015mm的配合间隙,反向器弧面上加工有圆弧槽,槽内安装拱形片簧4,外有弹簧套2,借助拱形片簧的弹力,始终给反向器一个径向推力,使位于回珠圆弧槽内的滚珠与丝杠3表面保持一定的压力,从而使槽内滚珠代替了定位键而对反向器起到自定位作用。这种反向器的优点是:在高频浮动中达到回珠圆弧槽进出口的自动对接,通道流畅、摩擦特性较好,更适用于高速、高灵敏度、高刚性的精密进给系统。
1-反向器;2-弹簧套;3-丝杠;4-碟簧片 外循环——外循环方式中的滚珠在循环返向时,离开丝杠螺纹滚道,在螺母体内或体外作循环运动。从结构上看,外循环有以下三种形式: (1)螺旋槽式: (2)插管式: (3)端盖式: 滚珠丝杠副的主要尺寸参数 d0——公称直径:它指滚珠与螺纹滚道在理论接触角状态时包络滚珠球心的圆柱直径。 它是滚珠丝杠副的特征(或名义)尺寸。 Ph(或螺距t)——基本导程:它指丝杠相对于螺母旋转6.28弧度时,螺母上基准点的轴 向位移。 行程:它指丝杠相对于螺母旋转任意弧度时,螺母上基准点的轴向位移。 此外还有丝杠螺纹大径d1、丝杠螺纹底径d2、滚珠直径DW、螺母螺纹底径D2、螺母螺纹内径D3、丝杠螺纹全长等。
滚珠丝杠设计实例与计算
计算举例 某台加工中心台进给用滚珠丝杠副的设计计算: 已知: 工作台重量 W 1=5000N 工作及夹具最大重量W 2=3000N 工作台最大行程 L K =1000mm 工作台导轨的摩擦系数:动摩擦系数μ=0.1 静摩擦系数μ0=0.2 快速进给速度 V max =15m/min 定位精度20 μm /300mm 全行程25μm 重复定位精度10μm 要求寿命20000小时(两班制工作十年)。 表1 解: 1) 确定滚珠丝杠副的导程 max max h i n V P =? ::/min :/min :h max max mm m r i P V n 滚珠丝杠副的导程 工作台最高移动速度 电机最高转速 传动比 因电机与丝杠直联,1i = 由表查得 max 15/min m V =
max 1500/min n r = 代入得, 10h mm P = 2)确定当量载荷 112() m s n F F F W W P μ==+++ 可求得: 12342920,1850,1320, 800,1290m F N F N F N F N F N ===== 3)确定当量转速 112212/min m n t n t n r t t ++???==++??? 230 4)预期额定动载荷 ①按预期工作时间估算。 按表3-24查得:轻微冲击取.w f =13 按表3-22查得:精度等级1-3取.a f =10 按表3-23查得:可靠性97%取.c f =044 已知h L h =20000 得:nm a c C N = =24815 ②拟采用预紧滚珠丝杠,按最大负载max F 计算, 按表3-25查得:中预载取:.e f =45 max F F N ==12920,代入得 ' max am e C f F N ==13140
滚珠丝杠副现状及发展
滚珠丝杠副现状及发展 学院机械学院 专业班级机设1094 姓名罗成李源刘飞华王庆维钟鸿翔 指导教师邓奕 2013/3/13
摘要 近年来,随着加工制造、工艺、材料冶炼及热处理等技术的进步和发展,作为精密线性传动的首选部件之一的滚珠丝杠副越来越受国内、国际制造业的重视,其综合性能也有了很大的提高,因此本文在此基础上对滚珠丝杠副进行简单的探讨和研究。 本文对其可以概括为以下的三个方面: 一方面,滚珠丝杠副是目前世界上应用最广泛的一种新型的传动形式,其结构是有哪些部件组成,结构特点是什么,工作原理以及具有什么发展优势;第二方面,回顾滚珠丝杠副的发展简史,概述了其国内、外的发展现状及动态总结了一些滚珠丝杠副的国内外研究成果;最后一方面,概述对滚珠丝杠副的优化前景和应用发展。 [关键词]滚珠丝杠副结构特点现状发展应用前景
前言:机电一体化技术是机械工业发展的必然趋势,有广阔的技术前景。滚珠丝杆副是为了适应机电一体化机械传动系统的要求而发展起来的一种新型传动机构,由滚珠丝杠、滚珠螺母(组件)和滚珠组成,可以将旋转运动变为直线运动,或者将直线运动转变成旋转运动。它具有传动效率高、启动力矩小、传动灵敏平稳、工作寿命长等优点。但是由于制造和装配的误差,滚珠丝杠副总是存在间隙,同时,滚珠丝杠在轴向载荷的作用下,滚珠和螺纹滚道接触部位会产生弹性变形,影响滚珠丝杠的传动精度。 滚珠丝杠副不仅是各类数控装备的核心功能部件,还是机械工业领域中资本密集型和技术密集型的重要通用零部件。在线性传动家族中滚珠丝杠副是应用面很广,产业化程度较高的产品。 一、滚珠丝杠副的结构及特点 (一)、滚珠丝杠副的结构 随着机床加工精度越来越高,滚珠丝杠副以其许多独特的优点,越来越多出现在有较高精度的机床上。滚珠丝杠螺母机构如图2-1所示,丝杠1和螺母2都具有圆弧形螺旋槽,合起来形成螺旋线滚道,连续装入若干(一般小于150个)等直径的滚珠3.当丝杠与螺母传动时,滚珠便沿螺旋槽滚动,数圈后经由回程引导装置,重新回到丝杠与螺母之间,形成一个闭合的循环回路[6]。一般滚珠丝杠副根据螺母的数量可以分为单螺母滚珠丝杠结构和双螺母滚珠丝杠结构如图2-2。
行星滚柱丝杠
一.载荷计算 行星滚柱丝杠在实际使用中, 很多情况下丝杠的速度及所承受的轴向载荷都是变化的。为计算当量动载荷, 首先须计算出丝杠所受的平均载荷。 当速度不变时, 所受载荷也是固定不变的,而当速度改变时, 载荷也随之而变。此时作用在丝杠上的平均载荷可由下式计算: 若速度及载荷方向不变, 而载荷大小在其最大值及最小值之间变化, 此时平均载荷可由下式计算: 从而可计算出当量动载荷: 根据计算出的当量动载荷, 就可以选取合适的丝杠。此外, 还应进行静载荷计算。
二.驱动力矩 丝杠加速时所需总的驱动力矩可由下式计算: 行星滚柱丝杠的效率取决于其工作条件: 它在任何条件下都不会自锁, 丝杠和螺母都可以作为主动件,因此,其效率有正效率,将旋转运动变为直线运动,和逆效率 直线运动,变为旋转运动, 其计算公式如下: 三.临界速度
行星滚柱丝杠的临界转速由下式计算: 高速切削技术在我国尚处于起步阶段, 行星滚柱丝杠作为一种新型的高效丝杠将会逐步得到实际应用。 . ------- 【一种新型的高速进给传动机构--行星滚柱丝杠】
滚柱丝杠副具有较大接触半径的滚动体(图1, R 可看作为等效滚珠半径) , 这样在导程小到只有1 或2mm 时仍可获得很高的承载能力(约为滚珠丝杠副的20 倍) ,并且强度高, 可靠性好。 此外, 和滚珠丝杠副相比, 行星式滚柱丝杠副还具有寿命长、振动小、噪声低、螺母和螺杆易分离等优点 行星式滚柱丝杠副的工作原理是螺杆转动, 推动滚柱沿螺杆和螺母组成的滚道作行星式运动。当将螺杆、滚柱和螺母的接触半径及头数控制到一定的数值时, 螺母与滚柱在轴向近似无相对运动, 螺母与滚柱同步地沿螺杆的轴线运动。 滚柱与螺杆及螺母的接触为点接触, 滚柱两端有外齿轮; 内齿环4 安装于螺母的两端, 与滚柱两端的齿轮相啮合。这两个齿轮副的啮合保证螺母与滚柱协调工作, 减小导向螺杆的滑动, 保持滚柱工作时的一致性; 导环5 保证各滚柱间有相同的间距, 避免相互间摩擦, 改善受力状态。 主要由丝杠、螺纹滚柱、齿圈、保持架和螺母等组成。螺纹滚柱为单头螺纹, 均匀排列在螺母的内螺纹圆周上, 其螺旋角与螺母相同, 以确保滚柱在螺母内不产生轴向窜动。
滚珠丝杠副的载荷计算
1滚珠丝杠副的载荷计算 ⑴工作载荷F 工作载荷F是指数控机床工作时,实际作用在滚珠丝杠上的轴向作用力,其数值可用下列进给作 用力的实验公式计算: 对于燕尾形导轨机床 F=kFx+f(Fz+2Fy+W)(1) 对于矩形导轨机床 F=kFx+f(Fz+Fy+W) (2) 对于三角形或组合导轨机床 F=kFx+f(Fz+W)(3) 对于钻镗主轴圆导轨机床 对于滚动导轨机床 F=Fx+f(Fz+W)+Fr(5) 式(1)?(5)中:Fx、Fy、Fz—x、y、z方向上的切削分力,N; Fr —密封阻力,N; V—移动部件的重量,N; M—主轴上的扭矩,N- m dz—主轴直径, mm 表 1 f'—导轨摩擦系数;f —轴套和轴架以及主轴的键的摩擦系数;k—考虑颠覆力矩影响的实验系数。正常情况下,k、f与f可取表1数值。 (2)最小载荷Fmin 最小载荷F?min为数控机床空载时作用于滚珠丝杠的轴向载荷。此时, Fx=Fy=Fz=Q (3)最大工作载荷F?max 最大载荷F?max为机床承受最大切削力时作用于滚珠丝杠的轴向载荷。
(4)平均工作载荷Fm与平均转速nm 当机床工作载荷随时间变化且此间转速不同时, 式中:1,t2,…,tn分别为滚珠丝杠在转速n1,n2,…,nn下,所受轴向载荷分别是F1,F2,…, Fn 时的工作时间(min) 当工作载荷与转速接近正比变化且各种转速使用机会均等时,可用下式求得Fm和nm Fm=(2Fmax+Fmin y 3(8) nm=(nm ax+nmin)/2(9) 2滚珠丝杠副主要技术参数的确定 (1)导程Ph 根据机床传动要求,负载大小和传动效率等因素综合考虑确定。一般选择时,先按机床传 动要求确定,其公式为:Ph> vmax/nm ax(10) 式中:vmax—机床工作台最快进给速度, mm/mir; nmax-驱动电机最高转速,r/min。在满足控制系统分辨率要求的前提下,Ph应取较大的数值。 (2)螺母选择 由于数控机床对滚珠丝杠副的刚度有较高要求,故选择螺母时要注重其刚度的保证。推荐按高刚度要求选择预载的螺母型式。其中插管式外循环的端法兰双螺母应用最为广泛。它适用重载荷传动、高速驱动及精密定位系统。并在大导程、小导程和多头螺纹中具有独特优点,且较为经济。 ①滚珠的工作圈数i和列数j。根据所要求性能、工作寿命,推荐按表 2选取。 表2 ②法兰形状。按安装空间由标准形状选择,亦可根据需要制成特殊法兰形状。 (3)导程精度选择 根据机床定位精度,确定滚珠丝杠副导程的精度等级。一般情况下,推荐按下式估算: 式中:E――累计代表导程偏差,卩m;
滚珠丝杠副传动系统
滚珠丝杠副传动系统 滚珠丝杠螺母副的特点 滚珠丝杠螺母副是一种低摩擦、高精度、高效率的机构。滚珠丝杠螺母副其它特点如下: 1.运动极灵敏,低速时不会出现爬行; 2.可以完全消除间隙并可预紧,故有较高的轴向刚度,反向定位精度高; 3.滚珠丝杠螺母副摩擦系数小,无自锁,能实现可逆传动; 4.滚珠丝杠螺母副的滚珠循环方式一般分外循环和内循环两种,如图7.3所示。 预紧是指它在过盈的条件下工作,把弹性变形量控制在最小限度。滚珠丝杠多采用双螺母调隙结构。用双螺母加预紧力消除轴向间隙时,必须注意:预紧力不宜过大或过小,要特别减小丝杠安装部分和驱动部分的间隙。 双螺母调隙结构分为螺纹式、垫片式和齿差式等,如图7.4所示。 內絹环方式 图7.3滚珠丝杠螺母副 (分别点击图片进入仿真页 a.螺纹式 b.垫片式
c.齿差式 图7.4双螺母调隙结构 滚珠丝杠的主要技术参数 滚珠丝杠的主要技术参数如图7.5所示。 1)名义直径DO 滚珠丝杠的名义直径DO是滚珠与螺纹滚道在理论接触角状态时,包络滚珠球心的圆柱直径。它是滚珠丝杠螺母副的特征尺寸。名义直径与承载能力有直接关系,DO越大,承载能力和刚度越大。 2)基本导程Ph 导程是丝杠相对于螺母旋转一圈时,螺母上基准点的轴向位移。导程的大小是根据机床的加工精度要求确定的。导程过小势必使滚珠直径变小,滚珠丝杠螺母副的承载能力亦随之减小。 3)滚珠直径dO 一般取d0=0.6Ph 4)滚珠的工作圈数j和工作滚珠总数N 工作圈数j 一般取2.5?3.5圈,而工作滚珠总数N以不大于150个为宜。 5)列数K 要求工作圈数较多的场合,可采用双列或多列式螺母的结构形式
滚珠丝杠螺母副的设计要点
目录 一成绩评定表………………………………………………………………………二课程设计任务书………………………………………………………………三前言……………………………………………………………………………………四滚珠丝杠螺母副的设计……………………………………………………五轴承选择……………………………………………………………………………六电机选择……………………………………………………………………………七设计总结……………………………………………………………………………八参考文献……………………………………………………………………………
成绩评定表 学生姓名李洋班级学号1001012116 专业机械设计制 造及其自动 化课程设计题目数控车床伺服进给系统 结构与控制设计(8) 评 语 组长签字: 成绩 日期201 年月日
课程设计任务书 学院机械学院专业机械设计制造及其自动化学生姓名李洋班级学号1001012116 课程设计题目数控车床伺服进给系统结构与控制设计(8) 实践教学要求与任务: 1、设计内容 (1)运动设计:确定最佳传动比,计算选择滚珠丝杠螺母副、伺服电动机、导轨及丝杠的支承; (2)结构设计:完成进给系统装配图设计(0#图1张); (3)验算:完成系统刚度计算,验算定位误差等; (4)设计单片机控制交流电机变频调速的原理图(多速开关); (5)按照加速-匀速1-减速-匀速2-减速停的速度曲线,设计单片机控制程序; (6)撰写设计计算说明书。 2、主要技术参数: X轴:进给行程 400 mm;进给速度 1-6000mm/min,快移速度 10m/min,;最大进给力:5500 N;定位精度:0.012mm/300mm, 定位精度:0.006mm,横向滑板上刀架重量: 80 Kg。 工作计划与进度安排:(共2周) (1)集中讲授设计内容、步骤及要求,下发设计题目及任务书,理解题目要求,查阅资料,确定结构设计方案(第16周的周一~周二) (2)指导学生进行设计计算及确定设计方案、装配图结构设计(第16周的周三~周五) (3)结构部分说明书撰写及答辩验收(第16周的周六~第17周的周一上午)(4)控制方案确定及原理图设计、控制程序设计(第17周的周一下午~周四)(5)控制部分说明书撰写及答辩验收(第17周的周四~周五) 指导教师: 201 年月日专业负责人: 201 年月日 学院教学副院长: 201 年月日
行星滚柱丝杠
行星滚柱丝杠 概述: 行星滚柱丝杠是一种可以将旋转运动与直线运动相互转化的机械传动装置,用滚珠作为中间传动体,用滚动摩擦取代滑动摩擦,这种传动方式与滚珠丝杠类似。行星滚柱丝杠作为一种新型的传动装置,具有摩擦小、效率高、寿命长、体积小、承载能力强等特点。行星滚柱丝杠按照结构的不同可以大致分为三类:标准型1、循环型2、轴承环型3。 标准型行星滚柱丝杠主要传动装置有丝杠、螺母和螺纹滚柱,丝杠具有90°牙型角的多头螺纹,螺母是和丝杠头数牙型角都相同的内螺纹,滚柱是具有相同牙型角的单头螺纹,多个滚柱沿丝杠圆周方向均匀分布,传动过程中滚柱既绕着丝杠轴线公转同时又绕自身轴线自转,丝杠和螺母分别与滚柱啮合,由于三者具有相同的牙型和螺旋升角,所以在啮合过程中可以保证丝杠及螺母与滚柱之间的纯滚动,并且确保螺母与滚柱没有轴向相对位移。在螺纹滚柱的两端加工直齿,与带有内齿圈的端盖啮合,用以消除螺旋升角对滚柱产生的倾斜力矩,并使滚柱沿圆周方向相对位置固定,保证所有滚柱的轴线都与丝杠轴线平行。 在标准型行星滚柱丝杠的基础上,根据不同性能要求进行修改形成了其他结构类型的行星滚柱丝杠。 循环型行星滚柱丝杠的丝杠和螺母与标准型行星滚柱丝杠相同都是牙型角为90°并且具有相同螺旋升角的多头螺纹,但是行星滚柱不再采用单头螺纹而是加工成没有螺旋升角的沟槽状结构,端盖的内齿圈被复位凸轮环取代,作用是使滚柱在完成一个循环后可以回到初始位置重新与丝杠啮合,作用与滚珠丝杠副中的滚珠返回装置相似,在螺母上加工有一个凹槽,当滚柱完成一个循环后被凸轮推入凹槽,凹槽中的螺纹引导滚柱回到开始啮合的位置。这种改变使得滚柱的加工难度降低,这样就可以采用更小的螺纹导程,提高位置精度,并且有更多的接触点,增强了承载能力。在啮合过程中滚柱周期性的与丝杠接触分离,频繁的加载卸载,影响使用寿命,并且高速时凸轮结构会产生较大的振动和噪音。 轴承环型行星滚柱丝杠的丝杠也是90°牙型角的多头螺纹,滚柱与循环型行1Strandgren C B. Roller screw: Us, 3182522(A) [P]. 1965-05-11. 2Cornelius C C , Lawlor S P .Roller screw sy stem: US, 7044017(B2) [P]. 2006-05-16. 3Saari O. Anti-Friction Nut/Screw Drive: US, 4576057[P]. 1986-05-18.
滚珠丝杠副基础知识
滚珠丝杠副基础知识 1. 什么是滚珠丝杠副? 滚珠丝杠副是由丝杠,螺母,滚珠组成的机械元件。其作用是将旋转运动转变为直线运动,或逆向由直线运动变为旋转运动。丝杠、螺母之间用滚珠做滚动体。 2. (1)(2)(3)(4)(5)(6) 3. 滚珠丝杠副有哪些特点?传动效率高。(达85%—98%)。灵敏度高。(无颤动、无爬行,同步性好)。定位精度高。(可以实现无间隙传动,刚度强,温升小)。使用寿命长。(是普通滑动丝杠的 4 倍以上,磨损小,精度保持期长)。使用、润滑和维修方便、可靠。可逆向传动,不自锁。(在垂直使用或需急停时,应附加自锁或制动装置)螺纹滚道的单圆弧、双圆弧各有何特点? 单圆弧的优点是无偏心,工艺上易获得,缺点是用于“T 类”丝杠时轴向间隙大,运动滞后,若减小间隙,滚珠接触点低,受力差,加工时磨出“油槽”,测不准节圆(滚珠或测棒与滚道圆弧不相切)。双圆弧避免了上述缺点,但工艺上难获得。4. 双圆弧滚道有什么特点? 主要是为了便于测准节圆。 5. 滚道底部的小圆弧起什么作用? 此小圆弧熟称“油槽”,使用中可存油及容异物,加工中起工艺作用。减少磨削径向力。 6. 什么是内循环、外循环滚珠丝杠副?它们是如何分类的? 一般定义为:滚珠在循环中始终不脱离丝杠表面的为内循环,反之为外循环。内循环有浮动(F)与固定(G)之分,外循环有螺旋槽(L)、插管(C)和端盖(DG)之分,其中插管式又有埋入式(CM)
和凸出式(CT)之别。相对来说,内循环滚珠丝杠副的螺母安装直径可以更紧凑,因此应用也最广泛。7. 浮动内循环返向器有何特点?优点是:(1)(2)(3)(4)(5)(6)(7)(8)流球通道为立体相切对称变曲率腔,技术含量高;圆形孔工艺性好,螺母轴向距离小,外径尺寸紧凑;凸筋既定位,又铲球,起双重作用;型腔为半开空间隧道,流球顺畅,与丝杠外径不摩擦;塑料制成,成本低,吸收振动,噪音小;可在上下及圆周方向上微量浮动,经跑合后自动趋向最佳位置;有效保护丝杠主体(滚珠脱落故障时,仅返向器损坏);直径适用范围广,还可用于双线(双头)螺纹; 缺点是:(1)不耐高温(适用范围±60℃);(2)丝杠滚道必须一端开通才可以装配。 8.插管循环方式的特点是什么?滚珠在插管内返向平滑,传动平稳:缺点是螺母安装尺寸大,管舌处薄弱,耐磨性、抗冲击性差。不适用于螺母转速高的场合。9.端盖式循环方式的特点是什么?径向尺寸大,轴向尺寸特小,尤其适合大导程多线螺纹;缺点是滚珠易产生撞击、跳动,摩擦损失。端盖式无法进行双螺母预紧 10.螺旋槽循环方式是否应逐渐淘汰?螺旋槽式虽然安装尺寸大,工艺复杂,传动不平稳,安装槽有方向性要求(朝上);但挡珠器可阻挡硬性异物进入螺母内,挡球可靠,适用高低温范围非常广,所以还不能淘汰,尤其多用于军工产品。 11. 双螺母预紧型滚珠丝杠副有何特点? 浮动内循环法兰—直筒组合的垫片预紧型应用最为普遍,内循环安装外径小,组合安装方便,调整预紧力简便,使用磨损出现间隙,还可自
滚珠丝杠副的设计计算
某台加工中心台进给用滚珠丝杠副的设计计算: 已知: 工作台重量 W 1=5000N 工作及夹具最大重量W 2=3000N 工作台最大行程 L K =1000mm 工作台导轨的摩擦系数:动摩擦系数μ=0.1 静摩擦系数μ0=0.2 快速进给速度 V max =15m/min 定位精度20 μm /300mm 全行程25μm 重复定位精度10μm 要求寿命20000小时(两班制工作十年)。 表1 1)确定滚珠丝杠副的导程 因电机与丝杠直联,i=1 由表1查得 代入得,
按第2页表,取 2)确定当量转速与当量载荷 (1)各种切削方式下,丝杠转速 由表1查得 代入得 (1)各种切削方式下,丝杠轴向载荷 由表1查得
代入得 (3)当量转速 由表1查得 代入得 (2)当量载荷 代入得 3)预期额定动载荷 (1)按预期工作时间估算
=1.3 按表9查得:轻微冲击取 f w 按表7查得:1~3取 按表8查得:可靠性97%取f =0.44 c =20000小时 已知:L h 代入得 (2)拟采用预紧滚珠丝杠副,按最大负载F 计算: max =4.5 按表10查得:中预载取 F e 代入得 取以上两种结果的最大值 4)确定允许的最小螺纹底径 (1)估算丝杠允许的最大轴向变形量 ① ≤(1/3~1/4)重复定位精度
② ≤(1/4~1/5)定位精度 : 最大轴向变形量μm 已知:重复定位精度10μm, 定位精度25μm ① =3 ② =6 取两种结果的小值=3μm (2)估算最小螺纹底径 丝杠要求预拉伸,取两端固定的支承形式 (1.1~1.2)行程+(10~14) 已知:行程为1000mm, 代入得
滚珠丝杠副怎么组成
滚珠丝杠副怎么组成 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 滚珠丝杠副怎么组成 滚珠丝杠副的4种安装方式 1-电动机2-弹性联轴器3-轴承4-滚珠丝杠5-滚珠丝杠螺母6-同步带轮7-弹性胀紧套8-锁紧螺钉 滚珠丝杠副是在丝杠和螺母之间以滚珠为滚动体的螺旋传动元件。滚珠丝杠副有多种结构型式。按滚珠循环方式分为外循环和内循环两大类。外循环回珠器用插管式的较多,内循环回珠器用腰形槽嵌块式的较多。 按螺纹轨道的截面形状分为单圆弧和双圆弧两种截形。由于双圆弧截形轴向刚度大于单圆弧截形,因此目前普遍采用双圆弧截形的滚珠丝杠。 按预加负载形式分,可分为单螺母无预紧、单螺母变位导程预紧、单螺母加大钢球径向预紧、双螺母垫片预紧、双螺母差齿预紧、双螺母螺纹预紧。数控机床上常用双螺母垫片式预紧,其预紧力一般为轴向载荷的1/3。 滚珠丝杠副与滑动丝杠螺母副比较有很多优点:传动效率高、灵敏度高、传动平稳:磨损小、寿命长;可消除轴向间隙,提高轴向刚度等。 滚珠丝杠螺母传动广泛应用于中小型数控机床的进给传动系统。在重型数控机床的短行程(6m以下)进给系统中也常被采用。 1.滚珠丝杠副的安装 数控机床的进给系统要获得较高的传动刚度,除了加强滚珠丝杠螺母本身的刚度之外,滚珠丝杠正确的安装及其支承的结构刚度也是不可忽视的因素。螺母座及支承座都应具有足够的刚度和精度。通常都适当加大和机床结合部件的接触面积,以提高螺母座的局部刚度和接触强度,新设计的机床在工艺条件允许时常常把螺母座或支承座与机床本体做成整体来增大刚度。
滚珠丝杠选型和电机选型计算
1.滚珠丝杠及电机选型计算 1.1 确定滚珠丝杠副的导程 根据电机额定转速和X 向滑板最大速度,计算丝杠导程。X 向运动的驱动电机选择松下MDMA152P1V ,电机最高转速为4500rpm 。电机与滚珠丝杆直连,传动比为1。X 向最大运动速度25mm/s ,即1500mm/min 。则丝杠导程为 mm n i V P h 34.045001/1500/max max ≈?=?= 实际取mm P h 10=,可满足速度要求。 1.2 滚珠丝杠副的载荷及转速计算 滚动导轨承重时的滑动摩擦系数最大为0.004,静摩擦系数与摩擦系数差别不大,此处计算取静摩擦系数为0.006。则导轨静摩擦力: N f g M F 2.108548.91500006.000=?+??=+??=μ 式中: M ——工件及工作台质量,经计算M 约为1500kg 。 f ——导轨滑块密封阻力,按4个滑块,每个滑块密封阻力5N 。 由于该设备主要用于检测,丝杠工作时不受切削力,检测运动接近匀速,其阻力主要来自于导轨、滑块的摩擦力。则有: 15010/2560/60min max =?=?=≈h P v n n rpm N F F F 2.1080min max =≈≈ 滚珠丝杠副的当量载荷: 3 2min max F F F m +=≈0F =108.2N 滚珠丝杠副的当量转速: 1502 min max =+=n n n m rpm 1.3 滚珠丝杠副预期额定动载荷 1.3.1按滚珠丝杠副的预期工作时间计算: N f f f F L n C c a w m h m am 06.5551 110012.10815000150601006033=??????=? = 式中: m n ——当量转速,15010/2560/60=?=?=h m P v n rpm h L ——预期工作时间,测试机床选择15000小时