LEHY-II无能量反馈小分类故障显示
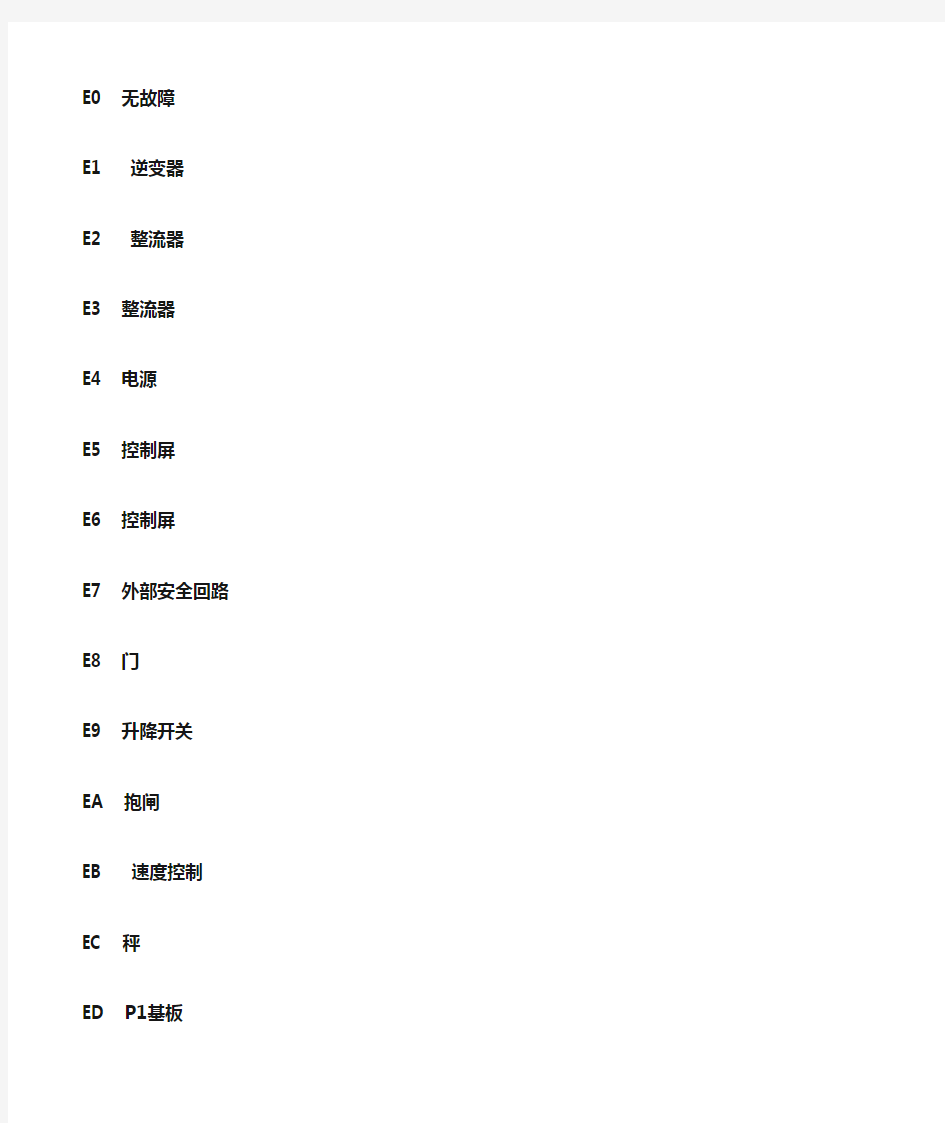

E0 无故障
E1 逆变器
E2 整流器
E3 整流器
E4 电源
E5 控制屏
E6 控制屏
E7 外部安全回路
E8 门
E9 升降开关
EA 抱闸
EB 速度控制
EC 秤
ED P1基板
EE 系统设置
EF 通信故障
1、逆变器
10F MELD 过负荷10D过负荷运行105E1 板门回路异常101硬件过流
11F手动过负荷11D过负荷走行118散热器温度异常112IPC 清除命令111NV 保护回路动作
12E过负荷运行12D过负荷运行128散热器温度异常
13E过负荷运行13D过负荷运行(再生电阻) 138散热器温度异常132电流检测零点漂移故障131DC-CT 故障
2、整流器
204NV 过电压202CNV 充电异常
211CNV 电压过低
234CNV 低电压233充电完了异常检查231充电完了
4、电源
41312V 电源异常410E1 板电源异常
441 RAM 备份开始
5、继电器
51C#LB ON 异常51B#5 ON 异常51A#BK2 强制OFF 异常519#BK2 OFF 异常518#BK2 ON 异常517#BK1 强制OFF 异常516#BK1 OFF 异常515#BK1 ON 异常514#LB 强制OFF 异常513 #LB OFF 异常512#5 强制OFF 异常511#5 OFF 异常
53E#RL OFF 故障53 D#RL ON 故障53C #BK2 强制OFF 故障53B#BK2 OFF 故障53A #BK2 ON 故障
539 #BK1 强制OFF 故障538#BK1 OFF 故障537#BK1 ON 故障536 #LB 强制OFF 故障535#LB OFF 故障534#LB ON 故障533#5 强制OFF 故障532#5 OFF 故障531#5 ON 故障
546#RL OFF 故障545 #RL ON 故障543#BK1 ON 故障542#LB ON 故障541#5 ON 故障
6、继电器
61160 或60A 故障
638轿顶(后) SSD ON故障637轿顶(后) SSU ON故障636轿顶(前) SSD ON故障635轿顶(前) SSU ON 故障634控制柜SSD ON 故障633控制柜SSU ON 故障632HDRN OFF 故障631HDRN ON 故障
7、安全回路
708维保自动低速操作
71F#29 安全电路719维保SFS 测试718抱闸力矩调整区间停止713EST 动作2 次712管理软件异常711
驱动软件异常
739维修运行NRS736出发异常735 管理不能再启动734E-STOP2 次733E-STOP1 次732DR 侧不能重启动731#89 回路断开
74F群管理S/W74E管理S/W74D安全回路复位指令743 E-STOP1 次
8、门
812开门运行(SLC) 811运行中开门
827后门SDE OFF 故障826前门SDE OFF 故障825后门CLT OFF 故障824 前门CLT OFF 故障82341DG OFF 故障
833后门OLT OFF 故障832 前门OLT OFF 故障83141DG ON 异常
84D后门OLT OFF 故障84C 后门OLT ON 故障84B 前门OLT OFF 故障84A前门OLT ON 故障849后门FG OFF 故障848 后门FG ON 故障847 前门FG OFF 故障846FG ON 故障845 后门CLT OFF 故障844后门CLT ON 故障843前门CLT OFF 故障842前门CLT ON 故障841层站DS 开门检出(EN81)
9、井道
91F上行UL 开关动作91E下行DL 开关动作91D UL/DL 都动作917 后门RLD OFF 故障916 后门RLU OFF 故障915前门RLD OFF 故障914 前门RLU OFF 故障913TSD 开关故障
93F UL/DL 都动作93E USR/DSR 都动作93D后门平层开关异常93C前门平层开关异常93B DZ 检测电路ON/OFF 故障938 后门RLD ON 故障937 后门RLU ON 故障936后门DZD ON 故障935后门DZU ON 故障934前门RLD ON 故障933前门RLU ON 故障932前门DZD ON 故障931 前门DZU ON 故障
94C层楼计数异常
A、曳引系统
A1A#BK2 强迫OFF A18#BK1 强迫OFF
A22制动器异常A21电机温度异常
A3E PM Z 相异常A3D磁极未学习A32制动器异常A31电机温度异常
B、速度
B0F SLC 失速B0E SLC 过高速B0D SLC 急停B08 曳引机堵转B07 再平层异常B05编码器偏差B04钢丝绳打滑B03 逆行B02过高速B01过低速
B18手动过高速B14 行程过头B13减速时限B12速度与图形偏差故障B11过低速
B23减速时限(缓停止) B21 再平层时限
B38FMS 失败B37再平层异常B35钢丝绳打滑B34 TSD 运行B33选层器故障B32运行检测B31速度与图形比较(16 次)
B46TLP 行走检出B43 选层器偏差故障B42选层器偏差警告
C、秤
C23秤装置断线C21 运行中秤异常
C34 秤设定异常C33秤装置断线C32 停止中秤异常C31运行中秤异常
D、DR
D03SLC 失速D02SLC 过高速D01SLC 急停
D1C CC_WDT4 次D1B CC_WDT5 次D14DR D89 指令D13 DR D5 指令D12 SLC TSD 异常D11SLC 开门运行
D3D CC_WDT3 次D31DR WDT 故障
D4F CC_WDT1 次D4E CC_WDT2 次D4A CC_WDT 屏蔽定时器动作D41DR WDT 屏蔽定时器动作
E、系统设定
E39控制RAM 故障E37 速度设定故障E36 曳引机设定故障E35 ACC 代码设定故障E33驱动系统设定故障E32驱动RAM 故障
F、通信
F3D后门IC 故障F3C 前门IC 故障F3B后门BC1 故障F3A前门BC1 故障F39秤故障F38后门DC 故障
F37后门CS 故障F36前门DC 故障F35 前门CS 故障F34 SC 故障F31P1CL 故障
F48后门DC 故障F47 后门CS 故障F46前门DC 故障F45 前门CS 故障F44 SC 故障F41P1CL 故障
F5B后门BC4 故障F5A后门BC3 故障F59后门BC2 故障F58后门BC1 故障F57前门BC4 故障F56前门BC3 故障F55前门BC2 故障F54 前门BC1 故障F53后门IC 故障F52前门IC 故障F51HS 故障
制动能量回馈系统协调控制
制动能量回馈系统协调控制 张俊智,张鹏君,陆欣,陈鑫 清华大学汽车安全与节能国家重点实验室,北京,100084 【摘要】本文为混合动力电动汽车设计了分层控制的制动能量回馈系统,该分层结构主要包括驾驶员意图识别、能量管理和元件协调控制三个部分。分层控制结构的采用,将复杂的制动能量回馈系统简化为若干部分,降低了控制难度,为研究提供了便利。所设计的系统已在一款串联混合动力客车上实现,并根据中国城市公交循环工况进行了道路测试。 【关键词】混合动力电动汽车,制动能量回馈系统,分层控制结构,协调控制 Coordinated Control for Regenerative Braking System Zhang Junzhi, Zhang Pengjun, Luxin, Chen Xin State Key Lab. of Automotive Energy and Safety, Tsinghua University, Beijing, China, 100084 Abstract: This paper presents a design of regenerative braking system(RBS) for hybrid electric vehicles using hierarchical control structure and method. The hierarchical model is mainly composed of three modules for driver intent identification, energy management and coordinated control based on components control. As a consequence, RBS, a complicated hybrid dynamic system, is successfully decomposed by several simple modules. The control system and strategies are carried out on a typical serial HEV bus, and tested on road based china typical urban cycle.. Key words: hybrid electric vehicles, regenerative braking system, hierarchical control structure, coordinated control 1 介绍 车辆的动能通过制动能量回馈系统可转化为其它形式能量储存起来,并进一步用于车辆驱动。研究显示,在城市驾驶循环中,发动机发出能量的大约1/3至1/2被制动过程所消耗[1,2]。因此,回馈制动是车辆提高燃油经济性并降低排放的有效方法,有助于缓解能源危机和环境污染。
机械手的分类组成
机械手的组成分类 机械手的组成 一般来说,机械手主要有以下几部分组成: 1.手部(或称抓取机构) 包括手指、传力机构等,主要起抓取和放置物件的作用。 2.传送机构(或称臂部)包括手腕、手臂等,主要起改变物件方向和位置的作用。 3.驱动部分它是前两部分的动力,因此也称动力源,常用的有液压气压电力和机四种驱动形式。 4.控制部分它是机械手动作的指挥系统,由它来控制动作的顺序(程序)、位置和时间(甚至速度与加速度)等。 5.其它部分如机体、行走机构、行程检测装置和传感装置等。(侯沂,刘涛. 2004)机械手的分类 机械手从使用范围、运动坐标形式、驱动方式以及臂力大小四个方面的分类分别为: 1. 按使用范围分类: (1)专用机械手一般只有固定的程序,而无单独的控制系统。它从属于某种机器或生产线用以自动传送物件或操作某一工具,例如“毛坯上下料机械手”、“曲拐自动车床机械手”、“油泵凸轮轴自动线机械手”等等。这种机械手结构较简单,成本较低,适用于动作比较简单的大批量生产的场合。 (2)通用机械手指具有可变程序和单独驱动的控制系统,不从属于某种机器,而且能自动完成传送物件或操作某些工其的机械装置。通用机械手按其定位和控制方式的不同,可分为简易型和伺服型两种。简易型只是点位控制,故属于程序控制类型,伺服型可以是点位控制,也可以是连续轨迹控制,一般属于数字控制类型(李允文,1994)。 2. 按运动坐标型式分类: (1)直角坐标式机械手臂部可以沿直角坐标轴x、y、z三个方向移动,亦即臂部可以前后伸缩(定为沿x方向的移动)、左右移动(定为沿y方向的移动)和上下升降(定为沿z方向的移动)(张军,冯志辉,2004); (2)圆柱坐标式机械手手臂可以沿直角坐标轴的x和z方向移动,又可绕z 轴转动(定为绕z轴转动),亦即臂部可以前后伸缩、上下升降和左右转动;(3)球坐标式机械手臂部可以沿直角坐标轴x方向移动,还可以绕y轴和z 轴转动,亦即手臂可以前后伸缩(沿x方向移动)、上下摆动(定为绕y轴摆动)和左右转动(仍定为绕z轴转动); (4)多关节式机械手这种机械手的臂部可分为小臂和大臂。其小臂和大臂的连接(肘部)以及大臂和机体的连接(肩部)均为关节(铰链)式连接,亦即小臂对大臂可绕肘部上下摆动,大臂可绕肩部摆动多角,手臂还可以左右转动。(孙桓等,2006) 3. 按驱动方式分类:
奥莎电梯用能量回馈装置使用说明书
STEP?iAStar-RG奥莎电梯用能量回馈装置 电梯应用 STEP●中国 2008.12 如有更改,恕不通知
iAStar-RG 奥莎电梯用能量回馈装置 使用说明书 出版状态:标准 产品版本:V1 德国Sigriner电子有限公司授权中国上海辛格林纳新时达 电机有限公司全权负责本使用说明书德文版的翻译、印刷,有权 对其内容进行调整。 版权所有,保留一切权利。 没有得到德国Sigriner电子有限公司、上海辛格林纳新时达 电机有限公司许可,任何单位和个人不得擅自摘抄、复制本书(软 件等)的一部分或全部,不得以任何形式(包括资料和出版物) 进行传播。 版权所有,侵权必究。内容如有改动,恕不另行通知。 All Copyright? reserved by STEP Sigriner Elektronik GmbH, Germany STEP Sigriner Elektronik GmbH authorizes in the translation, printing to the German edition of this inverter manual of Shanghai Sigriner STEP Electric Co., Ltd. have the right to adjust the contents. All rights reserved The information in this document is subject to change without prior notice. No part of this document may in any form or by any means (electronic, mechanical, micro-coping, photocopying, recording or otherwise) be reproduced, stored in a retrial system or transmitted without prior written permission from STEP Sigriner Elektronik GmbH & Shanghai Sigriner STEP Electric Co., Ltd.
电动汽车能量回馈的整车控制(1)
2005005 电动汽车能量回馈的整车控制 张 毅,杨 林,朱建新,冒晓建,卓 斌 (上海交通大学汽车电子研究所,上海 200030) [摘要] 以4种典型循环工况为例对电动汽车进行能量分析,设计了基于常规汽车制动系统的整车能量回馈控制方式,研究了控制策略,完成了车辆道路试验与标定优化。试验表明,整车能量回馈控制方式与控制策略安全、可靠,且柔顺性良好;利用能量回馈技术,蓄电池能量消耗可减少10%,能有效延长电动汽车的一次充电续驶里程。 关键词:电动汽车,能量回馈,控制策略 The Control Strategy of Energy Regeneration for Electric Vehicle Zhang Yi,Yang Lin,Zhu Jianxin,Mao Xiaojian&Zhuo Bin Instit ute of A utomotive Elect ronic Technology,S hanghai Jiaotong U niversity,S hanghai200030 [Abstract] The energy consumption in four typical vehicle testing cycles(FTP,HWEFT,ECE2EUDC and J P1015)is analyzed for EV.Based on the traditional vehicle braking system,a new regenerative braking scheme and its control strategy are designed.The road testing,calibration and optimization are performed.T est results show that the control scheme and strategy is safe,https://www.360docs.net/doc/9f5716580.html,ing the regenerating scheme,the energy consumption of battery can re2 duce by10percent and the driving range of EV in one charge can increase effectively. K eyw ords:Electric vehicle,E nergy regeneration,Control strategy 原稿收到日期为2003年12月29日,修改稿收到日期为2004年3月8日。 1 前言 电动汽车采用了新型的汽车动力,如何充分提 高车辆行驶能量效率,进而延长车辆续驶里程,是电 动汽车需要解决的一个关键问题。能量回馈是解决 该问题的主要技术措施。 能量回馈包括车辆制动能量回馈与车辆滑行能 量回馈两种。此时,驱动电机按发电机运行,将车辆 行驶动能转化为电能,可以起到3个作用:辅助制 动;回收能量给动力蓄电池充电,从而延长车辆续驶 里程;在车辆有供热需求时,直接利用这部分电能供 热取暖。 能量回馈制动与电动汽车其它电气制动方式 (主要有能耗制动、反接制动[1])比较,无须改变系 统硬件结构,回馈电流可柔性控制,可使制动效果与 能量回收效果综合最佳。因此,能量回馈是最适合 电动汽车的电气制动方式,其关键是能量回馈的过 程控制。电动汽车的能量回馈控制由整车控制与电 机控制交互作用而实现,作者在电动汽车制动能量 分析的基础上,设计一种能量回馈的整车控制方式, 并进行相应控制策略的研究。 2 制动能量分析 为了进行电动汽车能量回馈控制,需首先探明 其在各种用途中的制动能量回馈潜力。作者分别以 美国F TP工况、高速公路HFET工况、欧洲城市循 环ECE2EUDC工况和日本J P10154种循环工况为 例,进行制动能量的分析。 4种循环工况的驱动与制动能量如图1所示, 可见在这4种循环工况中,制动能量都占了不小的 比例,其中J P1015工况为2517%,ECE2EUDC工况 为18%,HFET工况为6%,F TP为25%。 回馈能量还与制动方式和回馈系统各环节的效 率因子有关[2]。电动汽车的制动方式包括:电气制2005年(第27卷)第1期 汽 车 工 程 Automotive Engineering 2005(Vol.27)No.1
机械手的发展史
机械手发展概述 机械手是近几十年发展起来的一种高科技自动化生产设备,它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。 1机械手发展史 机械手是在机械化,自动化生产过程中发展起来的一种新型装置。它是机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。在现代生产过程中,机械手被广泛的运用于自动生产线中,机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。 机械手首先是从美国开始研制的。1958年美国联合控制公司研制出第一台机械手。它的结构是:机体上安装一个回转长臂,顶部装有电磁块的工件抓放机构,控制系统是示教形的。1962年,美国联合控制公司在上述方案的基础上又试制成一台数控示教再现型机械手。商名为 Unimate(即万能自动)。运动系统仿照坦克炮塔, 臂可以回转、俯仰、伸缩、用液压驱动;控制系 统用磁鼓作为存储装置。不少球坐标通用机械手 就是在这个基础上发展起来的。同年,美国机械 制造公司也实验成功一种叫Vewrsatran机械手。 该机械手的中央立柱可以回转、升降采用液压驱 动控制系统也是示教再现型。这两种出现在六十 年代初的机械手,是后来国外工业机械手发展的 基础。1978年美国Unimate公司和斯坦福大学,麻省理工学院联合研制一种Unimate-Vicarm型工业机械手,装有小型电子计算机进行控制,用于装配作业,定位误差小于±1毫米。联邦德国KnKa公司还生产一种点焊机械手 ,采用关节式结构和程序控制。
国家大型科学仪器设备分类编码.
附件2: 国家大型科学仪器设备分类编码表附件2: 国家大型科学仪器设备分类编码表
附件2: 国家大型科学仪器设备分类编码表
附件2: 国家大型科学仪器设备分类编码表
附件2: 国家大型科学仪器设备分类编码表
附件2:国家大型科学仪器设备分类编码表 040105扫频仪 040106集成电路测试仪 040107图示仪 040108频谱分析仪 040199其他 040200射频和微波测试仪器040201EMI/EMC测试系统 040202天线和雷达截面测量系统 040203信号开发和截获测量系统 040204射频和微波测量系统 040299其他 040300通讯测量仪器 040301无线通讯测量仪 040302有线通讯测量仪 040303数字通讯测量仪 040304光通讯测量仪 040399其他 040400网络分析仪器 040401矢量分析仪 040402逻辑分析仪040499其他 040500大规模集成电路测试仪器 040501数字电路测试系统 040502模拟电路测试系统 040503数模混合信号测试系统 040599其他 049900其他 050000 海洋仪器 050100海洋水文测量仪器 050101波浪测量仪器 050102潮汐测量仪器050103海流测量仪器 050104海水温盐测量仪器 050105海洋深度测量仪器 050106海冰测量仪器 050107水色及透明度测量仪器 050108综合测量仪器 050199其他050200多要素水文气象测量系统 050201锚系水文气象资料浮标系统 050202水下多参数综合观测系统 050203台站水文气象自动观测系统 050204船用水文气象自动观测系统 050299其他 050300海洋生物调查仪器 050301叶绿素与初级生产力调查仪器 050302微生物调查仪器 050303浮游生物调查仪器 050304底栖生物调查仪器
电梯能量回馈装置原理及检验内容探讨
电梯能量回馈装置原理及检验内容探讨 摘要:近年来房地产热潮以及国家大张旗鼓的基础设施建设,带动了电梯业的发展。本文通过对电梯节能枝术基本原理的研究和对一种典型电梯能量回馈装置的检测,分析了电梯节能的实际效果,提出了电梯节能的必要性。 关键词:电梯;能量回馈装置;原理;检验内容。 一、前言 随着我国经济的快速发展,电梯的使用也越来越普遍,当然由电梯消耗的电能也日益增多,如何节约资源,降低能耗是我们研究的重点。在全球性能源紧缺,世界各国、各行、各业都在提倡绿色节能的今天,做好电梯的节能降耗意义重大。能量回馈技术节能效果明显,因此,针对电梯能量回馈装置原理及检验内容进行深入的研究和探讨。 二、能量回馈技术的分析与研究 1.电梯能量回馈技术的节能原理 有源能量回馈器主回路结构主要由滤波电容、串联电感、三相IGBT全桥和外围电路组成,如图1。电梯变频器的输入端和有源能量回馈器的输出端相连,有两个隔离二极管VD1和VD2与输入端相串联后与变频器的PN线相接。 图中虚线框内的控制电路的软件设计冗余度高,该电路是由外围信号采样器以及单片微机可编程逻辑芯片组成的,这种设计和结构能够使控制电路自动地识别三相交流电网的相位、相序、电流及电压的瞬时值,确保直流电可以立即回馈到交流电网,有序地控制智能功率模块即IPM的工作状态。 由于电梯在启动运行达到最高运行速度后具有最大的机械动能,电梯到达目标层前要逐步减速直到电梯停止运动为止,这一过程电梯就会释放机械动能。同时,曳引式电梯还是一个势能性负载,轿厢载重与对重装置之间有质量差时,电梯运行时会产生机械势能,特别是当电梯空载上行和电梯满载下行时均会释放出大量的机械势能。对于采用变频变压调速的电梯,运行中释放的机械能(含位能和动能)通过电动机和变频器转换成直流电能储存在变频器直流回路的电容中。此时电容就好比是一个小水库,回送到电容中的电能越多,电容电压就越高,如不及时释放电容中储存的电能,就会产生过压保护,最终导致电梯停止运行。目前国内绝大多数变频调速电梯采用制动电阻消耗电容中储存电能的方法来防止电容过电压,但这种方法不仅降低了系统能耗的效率,电阻产生的大量热量还恶化了电梯控制柜周边的环境。因此,电梯节能的第二类方法就是将运动中负载上的机械能(含位能和动能)通过专用装置变换成电能并回馈给交流局域电网,供附近其他用电设备使用,使系统在单位时间内消耗电量下降。从而达到节约电能的
机械臂分类
一、球坐标式机械手 1.球坐标式机械手是一种自由度较多、用途较广的机械手。球坐标式机械手的工作范围包括一个旋转运动、两个旋转运动、两个旋转运动加一个直线运动。 1、球坐标式机械手的基本动作 (1)手臂上下运动,即俯仰运动。 (2)手臂左右运动,即回转运动。 (3)手臂前后运动,即伸缩运动。 (4)手腕上下弯曲。 (5)手腕左右摆。 (6)手腕旋转运动。 (7)手爪夹紧运动。 (8)机械手整体移动。 2.球坐标式机械手的特点 球坐标式机械手的特点是将手臂装在枢轴上,枢轴又装在叉形架上,能在垂直面内做圆弧状上下俯仰运动,它的臂可做伸缩,横向水平摆动,还可以上下摆动,工作 范围和人手的动作类似。能自动选择最合理的动作线路,所以工效高。另外,由于上下摆动,它的相对体积小,而动作范围大。以行程为203mm工作油缸为例,其手臂的上下移动距离就能达到2450mm。若采用圆柱坐标式则其高度就要达到2450mm。 因为球坐标式机械手比较灵活如果考虑三维扫描设计的话可以考虑球坐标式机械手 二、关节式机械手 1.关节式机械手是一种适用于靠近机体操作的传动形式。它像人手一样有肘关节,可实现多个自由度,动作比较灵活,适于在狭窄空间工作。 2.关节式机械手的特点 关节式机械手有大臂与小臂摆动,以及肘关节和肩关节的运动。为具有人手操作的机能,需要研制最合适的结构。关节式机械手的传动机构采用齿轮式、齿条式和摆动式。其传动机构采用哪种形式,主要根据工件的轻重来决定。若按摆动式扭矩来设计,则油缸将加大,而装载油缸的机架也将随之加大。特别是靠近关节式前端关节部分的重量对肩部影响很大。传动机构在承受负荷的同时必须承受自重,因此,传动效率低。如需要大的转动角,则宜采用摆动油缸。 三、直角坐标式机械手 1.直角坐标式机械手是适合于工作位置成行排列或传送带配合使用的一种机械手。它的手臂可以伸缩,左右和上下移动,按直角坐标形式x、y、z 3个方向的直线进行运动。其工作范围可以是1个直线运动、2个直线运动或是3个直线运动。如在x、y、z 3个直线运动方向上各具有A 、B、C 3个回转运动,即构成6个自由度。 2、直角坐标式机械手的优点 (1)产量大、节拍短,能满足高速的要求。 (2)容易与生产线上的传送带和加工装配机械相配合。
科学仪器分类标准及编码规则
附件5 国家科技基础条件平台建设项目 大型科学仪器设备资源的建设与整合 大型科学仪器设备分类标准 及编码规则 (征求意见稿V1.0) 国家科学技术部条件财务司 二00六年三月
目录 ........................................................................................ I 1. 术语与定义 (1) 2. 大型科学仪器设备的分类标准及编码 (1) 2.1. 分类标准的体系结构及说明 (1) 22 分类编码规则及说明 (2) 23 分类标准与编码详述 (3)
1. 术语与定义 “大型科学仪器设备”是指在科学研究、技术开发及其他科技活动中使用的,价格在一 定数值以上的单台或成套科学仪器设备资源(含配套附件及软件)。本次标准规范中的“大 型科学仪器设备” 没有包括下面一些“仪器”和“设备”。 1.实验室设备 2 ?大科学工程 3. 专用在线仪器 4. 自动化仪器仪表 2. 大型科学仪器设备的分类标准及编码 2.1.分类标准的体系结构及说明 本大型科学仪器设备分类标准采用应用领域和仪器原理相结合的分类原则,即“先按大 的应用领域分大类;然后在每一大类内先按原理分;按原理不好分时,再按具体应用分”的分类原则。根据这一原则,本分类标准按大的应用领域分了十三个大类,其中第十三大类“其 他”是指前十二大类所不能包括的科学仪器。在前十二大类中,前三类:“分析仪器”、“物 理性能测试仪器”和“计量仪器”属通用型“科学仪器”;后九类则属专用型“科学仪器”。 因此,后九类应用领域中涉及到的通用型“科学仪器”,在前三类中已列出的就不再列了。 本分类标准采用三个层次,即每一大类根据仪器的原理或应用先分成若干中类,每一中 类再根据原理或应用分成若干小类,每一小类中虽然还可以再继续分,但为了编码工作的方 便,就不再继续分了,所以每一小类中都包括了很多种仪器。 为便于分类标准的扩展,对于大类、中类、小类中都设置“其他”类,将上述分类不能包含的设备,暂时归于相应的“其他”类。 “大型科学仪器设备分类标准”中一些问题的具体说明 1?医学诊断仪器中与生化分离分析有关的仪器放在“生化分离分析仪器”中。 2?特种检测仪器是指与安全有关的一些大型检测仪器。 3?“气象仪器”和“地质勘探仪器” 分别放在“大气探测仪器”和“地球探测仪器”中。
大型科学仪器设备的分类标准及编码样本
大型科学仪器设备的分类标准及编码 分类标准的体系结构及说明 本大型科学仪器设备分类标准采用应用领域和仪器原理相结合的分类原则, 即”先按大的应用领域分大类; 然后在每一大类内先按原理分; 按原理不好分时, 再按具体应用分”的分类原则。根据这一原则, 本分类标准按大的应用领域分了十三个大类, 其中第十三大类”其它”是指前十二大类所不能包括的科学仪器。在前十二大类中, 前三类: ”分析仪器”、”物理性能测试仪器”和”计量仪器”属通用型”科学仪器”; 后九类则属专用型”科学仪器”。因此, 后九类应用领域中涉及到的通用型”科学仪器”, 在前三类中已列出的就不再列了。 本分类标准采用三个层次, 即每一大类根据仪器的原理或应用先分成若干中类, 每一中类再根据原理或应用分成若干小类, 每一小类中虽然还能够再继续分, 但为了编码工作的方便, 就不再继续分了, 因此每一小类中都包括了很多种仪器。 为便于分类标准的扩展, 对于大类、中类、小类中都设置”其它”类, 将上述分类不能包含的设备, 暂时归于相应的”其它”类。 ”大型科学仪器设备分类标准”中一些问题的具体说明 1.医学诊断仪器中与生化分离分析有关的仪器放在”生化分离分析仪器”中。 2.特种检测仪器是指与安全有关的一些大型检测仪器。 3.”气象仪器”和”地质勘探仪器”分别放在”大气探测仪器”和”地球探测仪器”中。 4.”计量仪器”中只列入了与”基本量”有关的仪器, 也就是能够直接朔源到”基本量”的仪器。要经过”标准物质”朔源的, 都列入到”分析仪器”。
5.为了应用上的方便, 在分类时尽可能的与过去的传统分类方法衔接, 如: 质谱仪器分类, 有建议按质量分析器的工作原理分成磁质谱、四极质谱、离子阱质谱、飞行时间质谱、离子回旋质谱等等; 但为了应用上的方便, 并与传统分类方法衔接, 本标准仍按应用领域分为无机质谱、有机质谱、同位素质谱、二次离子质谱等等。又如: 有建议将电子光学仪器改为微束分析仪器, 这是国际上的最新叫法; 可是, 国内当前多数人还是习惯称为电子光学仪器, 故本标准仍保留了电子光学的叫法。 6.这次提出的”科学仪器分类”只是一个试行的分类方法, 在实施的过程中还会不断地听取各方面的意见, 作进一步的修改。 分类编码规则及说明 大型科学仪器的分类编码规则采用六位数字编码, 一般按照大类、中类、小类, 每类用两位阿拉伯数字, 从”01”开始, 顺序递增表示。 为使编码等长, 达到六位数字, 对于大类编码后面补充四个”0”, 对于中类编码后面补充两个”0”。 为便于编码的扩展, 对于各级”其它”类采用”99”进行编码。 按照国家基础条件编码要求编制前6位数, 第7位”进口仪器”填”1”、”国产仪器”填”2”; 后3位为城市区号, 如长沙市填”731”。 □□□□□□□□□□ 1 2 3 4 5 1 ——仪器大类代码, 如分析仪器, 代码为: 01 2 ——仪器中类代码, 如电子光学仪器, 代码为: 0101 3 ——仪器小类代码, 如透射电镜, 代码为: 010101 4 ——仪器产区类别: 进口为1, 国产为2
有源能量回馈器在电梯节能改造中应用
有源能量回馈器在电梯节能改造中应用 摘要:分析了当前我国电梯节能现状及实现条件,介绍了有源能量回馈器的原理,设计出该装置的理论电气原理,通过试验对比测试,证明有源能量回馈具有的良好节能效果。 关键词:有源能量回馈节能改造 Abstract:Analyzed the current elevators energy conservation situation in China, introduced the principle of active energy feedback device, after test research, concluded that the theoretical Electrical Schematic of a device, by comparison tests, energy feedback has proved to be the source of good energy-saving effect. Key words:energy-saving device 据国家特种设备协会于2007年的统计,全国在用电梯一共100万台,达到节能标准的只有1.9%。我国是资源大国,也是能源匮乏的国家,人均能源不到世界平均水平的1/65,我国也是电梯使用最多的国家,以每台电梯每天平均用电80kW·h计,则年耗电量将达290多亿kw.h。假设到2015年时全部采用节能电梯,将节电80亿kw.h,这相当于一个大型水力发电站1年的发电量[1]。2009年新颁布的《特种设备安全监察条例》已经将电梯节能列入条例,电梯节能已经上升到一个战略高度,非常具有实际的意义。
能量回馈单元原理及应用
能量回馈单元基本原理及应用 收藏此信息打印该信息添加:单升华来源:未知 单升华 北京时代新纪元技术有限公司,北京100085 摘要 TEFU系列能量回馈单元是与通用变频器配套使用的设备,采用正弦波电流跟踪技术,它 主要应用于往复运动、频繁正反转和快速停车的场合,如油田抽油机、电梯、卷绕设备、大型龙门 刨床、机床主轴等。与通常采用制动单元和制动电阻的方式相比,能量回馈单元可以显著节能,并 且制动转矩响应动作迅速,是一款绿色、环保、节能的产品。介绍了它的基本原理、试验波形及应 用。 关键字正弦波电流跟踪;制动转矩;响应时间;节能 The Basic Theory and Application of TEFU Series Energy Feedback Unit SHAN Shenghua Beijing New Century Technologies Co. Ltd.,Beijing 100085 China Abstract TEFU series energy feedback unit is a device that is used with general inverter, the sine wave current tracking technology is adopted. The fields of application include reciprocation,often changing direction and rapid brake,such as take out oil machine,elevator,winding device,large planer,principal axis etc. It can save more energy compared with brake unit and brake resistor,and the brake torque is bigger. It is a green, safeguard inviroment and save energy product. It's basic theory,test waves and applications is introduced. Keywords sine wave current tracking technology;brake torque;response time;save enengy 0 引言 在变频器电气传动系统中,当电机的负载是位能式负载,如油田抽油机、矿用提升机等,或大惯量负载,如风机、水泥制管、动平衡机等,以及轧钢机、大型龙门刨床、机床主轴等需要快速制动类负载时,电机都不可避免地存在发电过程,即电机转子在外力的拖动或负载自身转动惯量的维持下,使得电机的实际转速大于变频器输出的同步转速,电机所发出的电能,将会通过变频器逆变桥的续流二极管组成的三相整流电路,储存在变频器的直流母线的滤波电容中。如果不把这部分能量消耗掉,直流母线电压就会
工业机械手结构
工业机械手结构设计论文 摘要:实践证明,工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。工业生产中经常出现的笨重工件的搬运和长期频繁、单调的操作,采用机械手是有效的。此外,它能在高温、低温、深水、宇宙、放射性和其他有毒、污染环境条件下进行操作,更显示其优越性,有着广阔的发展前途。 关键词:机械手可编程序控制器(PLC) 技能特性 引言 我国机械手的研究和应用起步较晚,但是随着国内外机械手的快速发展、社会需求的增大和技术的进步,装配机械手得到了迅速的发展,多品种、少批量生产方式和为提高产品质量及生产效率的生产工艺需求,是推动装配机械手发展的直接动力。PLc是可编程序控制器的简称,于60年代末期在美国首先出现,目的是用来取代继电器,执行逻辑、计时、计数等顺序控制功能,建立柔性程序控制系统。经过近几十年的发展,PLc己十分成熟与完善。当前的中国,随着生产力的迅猛发展,工业发展的步伐越来越快在各行业各领域,对自动化程度的要求也愈来愈高.了更好地适应这种情况,科学技术必须被广泛地应用在实际生产中,而PLc以其自身的优势,在自动化领域内扮演着重要的角色,不容忽视! 1、设计原理 机械手主要由执行机构.驱动机构和控制系统构成.。机械手的执行机构又包括手部、手臂和躯干。手部安装在最前端,任务是来准确的抓取工件,当然一 说到手一定是与人的相似,所以必须具备手指,而且应具有与人手相似的动作或能代替人完成一系列的动作,以此来达到目的。手臂的作用是用来辅助手部准确的抓住工件并能够转移到所需要的位置,机械手的运动有两种:一个是上下直线运动,另一个是左右直线运动。因此其必须安装有液压缸、电液脉冲马达、电磁阀等作为其执行机构的动力部分或辅助系统。驱动机构主要有四种:液压驱动、气压驱动、电气驱动和机械驱动。其主要以电气和气压驱动为主,只有少量的运用液压和机械驱动。 液压驱动主要是驱动大体积的重型工业设备如:锅炉等。它的优点是压力高、体积小、力量大动作平稳。缺点是结构繁琐.成本高.而且需要配备压力源。气压驱动的元件是气压缸、气压马达等。一般采用4—6个大气压.也有一些更大的.具体要根据实际情况来定,虽然它的力量比较小、体积比较重,但是出于廉价,而且不影响动作。所以我们的手部采用此种驱动。 电气驱动时,直线运动可以采用电动机带动丝杠、螺母机构。我们通用的机械手则考虑到用步进电动机、直或交流司服电机、和变速箱等电气驱动有动
机械手的发展史
机械手技术发展概述 摘要:机械手是近几十年发展起来的一种高科技自动化生产设备,它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。本文参阅了大量的国内外期刊杂志,论述了机械手的发展历程、组成和分类,同时对国内外机械手的研究现状和发展趋势做了一定的了解。另外,本文还对机械手的常见驱动方式做了一番分析,并预测了它的发展趋势。 关键词:机械手;液压气压驱动;发展 1机械手发展史 机械手是在机械化,自动化生产过程中发展起来的一种新型装置。它是机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性(王希敏,1992)。在现代生产过程中,机械手被广泛的运用于自动生产线中,机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。(王承义,1995) 机械手首先是从美国开始研制的。1958年美国联合控制公司研制出第一台机械手。它的结构是:机体上安装一个回转长臂,顶部装有电磁块的工件抓放机构,控制系统是示教形的。1962年,美国联合控制公司在上述方案的基础上又试制成一台数控示教再现型机械手。商名为Unimate(即万能自动)。运动系统仿照坦克炮塔,臂可以回转、俯仰、伸缩、用液压驱动;控制系统用磁鼓作为存储装置。不少球坐标通用机械手就是在这个基础上发展起来的。同年,美国机械制造公司也实验成功一种叫Vewrsatran机械手。该机械手的中央立柱可以回转、升降采用液压驱动控制系统也是示教再现型。这两种出现在六十年代初的机械手,是后来国外工业机械手发展的基础。1978年美国Unimate公司和斯坦福大学,麻省理工学院联合研制一种Unimate-Vicarm型工业机械手,装有小型电子计算机进行控制,用于装配作业,定位误差小于±1毫米。联邦德国KnKa公司还生产一种点焊机械手,采用关节式结构和程序控制。 目前,机械手大部分还属于第一代,主要依靠人工进行控制;改进的方向主要是降低成本和提高精度。第二代机械手正在加紧研制。它设有微型电子计算控制系统,具有视觉、触觉能力,甚至听、想的能力。研究安装各种传感器,把感觉到的信息反馈,使机械手具有感觉机能。第三代机械手则能独立完成工作中过程中的任务。它与电子计算机和电视设备保持联系,并逐步发展成为柔性制造系统FMS和柔性制造单元FMC中的重要一环节。 2.机械手的组成分类及驱动 2.1 机械手的组成 一般来说,机械手主要有以下几部分组成:
冲床机械手的三大种类【解析】
冲床机械手的三大种类 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 随着计算机技术和人工智能技术的飞速发展,工业机器人在功能和技术层次上有了很大的提高,加之,人口红利衰竭、制造业的普遍转型升级,机器人时代已经到来了,应用工业机器人代替人工作业已经成为一种趋势。制造业中,越来越多的企业已经认识到机器人机械手代替人工实现自动化生产的价值。 机器人领域向深广发展的巨大空间,各种用途的工业机器人相继问世。机器人技术扩散和渗透到各个领域形成了各式各样的新机器。冲压机械手作为工业机器人的一个细化分支,是针对冲压生产的工艺特征而专门研制的一种自动化机械设备。能够替代工人在各个冲压工位上进行物料的搬运、上下料等工作,有效提升冲压生产的整体生产效率。 在冲压自动化生产线中,冲压件的生产效率与质量,除了与产品的设计和模具有关外,同时与生产中上下料搬运的环节也有很大的关系。传统的人工作业存在着安全隐患高、效率低下以及人为误差所造成的不良率高等问题。采用冲压机械手等自动化设备代替人工作业能实现快速而准确的自动化定位搬运,不仅大大提高冲压加工是生产效率与质量,对于冲压等重复性、危险性、节奏较高的加工行业,“节省人工成本”,“保障人工及设备的安全”,“稳定产能和产品质量”是现代化工业“开拓创新”精神的重要表现。因此,研发冲压机械手,具有十分重要的意义。 目前,应用于自动冲压生产线的冲床机械手主要有三大类:关节式冲床机械手、连杆式冲压机械手、摆臂冲床机械手。这三类冲床机械手各应用于不同场合的自动冲压生产线。各自的特点主要如下:
大型科学仪器分类标准和编码规则
大型科学仪器分类标准和编码规则(试行) 一、分类标准的体系结构及说明 本大型科学仪器设备分类标准采用应用领域和仪器原理相结合的分类原则,即“先按大的应用领域分大类;然后在每一大类内先按原理分;按原理不好分时,再按具体应用分”的分类原则。根据这一原则,本分类标准按大的应用领域分了十三个大类,其中第十三大类“其他”是指前十二大类所不能包括的科学仪器。在前十二大类中,前三类:“分析仪器”、“物理性能测试仪器”和“计量仪器”属通用型“科学仪器”;后九类则属专用型“科学仪器”。因此,后九类应用领域中涉及到的通用型“科学仪器”,在前三类中已列出的就不再列了。 本分类标准采用三个层次,即每一大类根据仪器的原理或应用先分成若干中类,每一中类再根据原理或应用分成若干小类,每一小类中虽然还可以再继续分,但为了编码工作的方便,就不再继续分了,所以每一小类中都包括了很多种仪器。 为便于分类标准的扩展,对于大类、中类、小类中都设置“其他”类,将上述分类不能包含的设备,暂时归于相应的“其他”类。 “大型科学仪器设备分类标准”中一些问题的具体说明 1.医学诊断仪器中与生化分离分析有关的仪器放在“生化分离分析仪器”中。 2.特种检测仪器是指与安全有关的一些大型检测仪器。 3.“气象仪器”和“地质勘探仪器”分别放在“大气探测仪器”和“地球探测仪器”中。 4.“计量仪器”中只列入了与“基本量”有关的仪器,也就是可以直接朔源到“基本量”的仪器。要通过“标准物质”朔源的,都列入到“分析仪器”。 5.为了应用上的方便,在分类时尽可能的与过去的传统分类方法衔接,如:质谱仪器分类,有建议按质量分析器的工作原理分成磁质谱、四极质谱、离子阱质谱、飞行时间质谱、离子回旋质谱等等;但为了应用上的方便,并与传统分类方法衔接,本标准仍按应用领域分为无机质谱、有机质谱、同位素质谱、二次离子质谱等等。又如:有建议将电子光学仪器改为微束分析仪器,这是国际上的最新叫法;但是,国内目前多数人还是习惯称为电子光学仪器,故本标准仍保留了电子光学的叫法。 6.这次提出的“科学仪器分类”只是一个试行的分类方法,在实施的过程中还会不断地听取各方面的意见,作进一步的修改。 二、分类编码规则及说明 大型科学仪器的分类编码规则采用六位数字编码,一般按照大类、中类、小类,每类用两位阿拉伯数字,从“01”开始,顺序递增表示。 为使编码等长,达到六位数字,对于大类编码后面补充四个“0”,对于中类编码后面补充两个“0”。 为便于编码的扩展,对于各级“其他”类采用“99”进行编码。
能量回馈
变频器能量回馈解决方法 1引言 在通用变频器、异步电动机和机械负载所组成的变频调速传统系统中,当电动机所传动的位能负载下放时,电动机将可能处于再生发电制动状态;或当电动机从高速到低速(含停车)减速时,频率可以突减,但因电机的机械惯性,电机可能处于再生发电状态,传动系统中所储存的机械能经电动机转换成电能,通过逆变器的六个续流二极管回送到变频器的直流回路中。此时的逆变器处于整流状态。这时,如果变频器中没采取消耗能量的措施,这部分能量将导致中间回路的储能电容器的电压上升。如果当制动过快或机械负载为提升机类时,这部分能量就可能对变频器带来损坏,所以这部分能量我们就应该考虑考虑了。 在通用变频器中,对再生能量最常用的处理方式有两种:(1)、耗散到直流回路中人为设置的与电容器并联的“制动电阻”中,称之为动力制动状态;(2)、使之回馈到电网,则称之为回馈制动状态(又称再生制动状态)。还有一种制动方式,即直流制动,可以用于要求准确停车的情况或起动前制动电机由于外界因素引起的不规则旋转。 在书籍、刊物上有许多专家谈论过有关变频器制动方面的设计与应用,尤其是近些时间有过许多关于“能量回馈制动”方面的文章。今天,笔者提供一种新型的制动方法,它具有“回馈制动”的四象限运转、运行效率高等优点,也具有“能耗制动”对电网无污染、可靠性高等好处。 2 能耗制动 利用设置在直流回路中的制动电阻吸收电机的再生电能的方式称为能耗制动,如图1所示。 其优点是构造简单;对电网无污染(与回馈制动作比较),成本低廉;缺点是运
行效率低,特别是在频繁制动时将要消耗大量的能量且制动电阻的容量将增大。 一般在通用变频器中,小功率变频器(22kW以下)内置有了刹车单元,只需外加刹车电阻。大功率变频器(22kW以上)就需外置刹车单元、刹车电阻了。 3 回馈制动 实现能量回馈制动就要求电压同频同相控制、回馈电流控制等条件。它是采用有源逆变技术,将再生电能逆变为与电网同频率同相位的交流电回送电网,从而实现制动如图2所示。 回馈制动的优点是能四象限运行,如图3所示,电能回馈提高了系统的效率。其缺点是:(1)、只有在不易发生故障的稳定电网电压下(电网电压波动不大于10%),才可以采用这种回馈制动方式。因为在发电制动运行时,电网电压故障时间大于2ms,则可能发生换相失败,损坏器件。(2)、在回馈时,对电网有谐波污染。(3)、控制复杂,成本较高。 4新型制动方式(电容反馈制动) 4.1主回路原理 主回路原理图如图4所示。 整流部分采用普通的不可控整流桥进行整流(如图中的VD1——VD6组成),滤波回路采用通用的电解电容(图中C1、C2),延时回路采用接触器或可控硅都行(图中T1)。充电、反馈回路由功率模块IGBT(图中VT1、VT2)、充电、反馈电抗器L及大电解电容C(容量约零点几法,可根据变频器所在的工况系统决定)组成。逆变部分由功率模块IGBT组成(如图VT5—VT10)。保护回路,由IGBT、功率电阻组成。