基于RTX的飞行模拟器分布式实时仿真系统
分布式多媒体可视化交互管理系统方案
PMIPS分布式多媒体可视化交互管理系 统 广州拓视悦声电子科技有限公司 版本:2016-V1.1
目录一、...................................................................................................... 应用需求分析3 二、传统应用解决方案 (4) 三、PMIPS应用解决方案 (5) 四、PMIPS系统功能 (6) 五、PMIPS系统优势 (11) 六、PMIPS系统特色 (14) 七、PMIPS系统配置 (17)
一、应用需求分析 在当前,各类用户的会议室、多功厅、指挥中心等场所的音视频系统需求特征如下: 前端信号类型多,有笔记本电脑、高清摄像机等,涉及到的接口、信号格式、协议繁多; 要求兼容性好,扩展方便; 信息任意调用,传输分享方便, 采用屏蔽网线或光纤传输,大大简化布线(极大的节省布线成本和人工)和提高信号传输的安全性和 减少外界干扰。 描述一:(针对会议室) 强大图像处理,可以实现会议视频 VGA/DVI/HDMI/3G-SDI/YCBCR 视频、计算机/电脑网络信号等信号混合同屏显示,支持所有输入信号源在不同地点的任意显示屏终端上(包括投影机、液晶电视、显示 器)任意显示,可以实现单屏幕多画面处理(包括放大、缩小、多画面 显示、叠加等)。 描述二:(针对指挥中心) 强大图像处理,可以实现会议视频 VGA/DVI/HDMI/3G-SDI/YCBCR 视频、计算机/电脑网络信号等信号混合共屏显示,支持所有输入信号源在不同地点的任意显示屏终端上(包括投影机、液晶电视、显示 器、DLP背投拼接墙、LCD液晶拼接墙、PDP等离子拼接墙等)任 意显示,可以实现各种信号任意全墙漫游(包括单屏、跨屏、全墙显示、 组屏显示)、任意大小缩放显示。
仿真飞行驾驶模拟器体验说明
仿真飞行驾驶模拟器体验说明 仿真飞行驾驶模拟器,简而言之即能够实现模拟空中飞行,通过复杂的功能装置实现零基础上手操作的飞行模拟装置,未来几年内像私家轿车一样普遍的交通发展。 仿真飞行驾驶模拟器座舱及体验,通过简单的操作装置进行详细的驾驶说明: 幻视联创飞行模拟器包含模拟座舱、运动模拟系统、视景模拟系统、指挥台以及计算机系统。游戏能够复现飞行及空中环境的操作与模拟。 1. 首先在进入到游戏之前先将引擎降到最低,按下开始键start之时可以看到有游戏的进入界面。 2.映入眼帘的是飞机在机场向跑道上滑行,当到达跑道起始点的时候可以听到提示音:“飞机滑行到指定跑道,准备起飞。”此时把引擎拉到最高。这是正式进入游戏的界面,看到准备起飞的字样,飞行员和飞机。表明飞机就现在将要进入了飞行的状态。 3.当看到姿态仪上速度达到100节(在速度线上有一红线提示)的时,将拉杆向上推起,
让飞机成为起飞的状态。 4. 此时可以看到飞机像天空中飞行,把飞机度数控制在15度左右。(幅度不要过大)这时我们要注意飞机的状态。速度控制在300节左右,高度控制在6000 m到9000m左右。如果飞行高度超过10000米,将会看到云海,尽量使飞机的飞行不要超过13000米,否则会影响飞机的飞行安全。注意飞机(中间的黄色方格)的状态高度及速度的位置变化。 5.飞机在正常飞行时,将飞机处于配平状态,即当飞机飞到一定的高度后,我们将不再提升它的高度,而是将飞机处于配平状态。同时引擎可保持在0的位置使飞机匀速前进。飞机不可能永远的向空中飞行,在一定的高度保持稳定。姿态球保持配平的状态。目的:飞机能够平衡的飞行对于乘客来说就如同在地面上一样。对乘客的安全也有了保障。
跨平台分布式仿真支撑系统
大风软件项目主要内容及技术路线: A.项目主要研究内容 1) 支持HLA构架的分布式仿真:HLA分布式交互仿真高层构架体系是当前分布式仿真的通用标准。跨平台分布式仿真支撑系统需要解决如何在现有成熟商业软件产品SimuWorks基础上封装和拓展,使其由支持单结点仿真升级为支持多结点分布式协同仿真。同时需要提供标准RTI 接口,支持同第三方符合该标准的软件的交互,从而使基于SimuWorks环境下开发的仿真模型能够进一步应用于更多领域。 2) 嵌入式实时操作系统下的仿真平台:在开发半实物仿真系统时,需要在嵌入式操作系统下开发仿真模型,由于嵌入式系统下编程的复杂性,存在内存碎片、时钟管理、任务调度等一系列问题,研究人员要在计算机程序编制上花费大量精力。跨平台分布式仿真支撑系统提供了图形化建模工具及嵌入式操作系统下的通用仿真平台,可以根据用户的硬件环境和部署方案动态生成仿真模型,在线调试和运行。同时本仿真平台使用了动态内存池技术、定时器自适应技术等解决了内存碎片问题和任务调度等问题。 3) 分布式仿真系统的时间管理:时间管理是分布式仿真系统中十分关键的一项技术。时间不一致将导致分布式联合仿真运行失败。传统的保守时间管理机制和乐观时间管理机制虽然理论较完善,但是在实际应用中其时间效率和稳定性存在问题。跨平台仿真支撑系统实现了混合时间管理机制和自适应时间管理机制,用户可以根据仿真模型的特点选择时间推进方式。 4) 分层对称RTI的体系构架:国内外RTI结构有集中式、全分布式两种基本结构。集中式RTI 服务器的性能受仿真节点数目的限制,而全分布式RTI架构,成员管理过度分散,很容易造成系统的不一致性。跨平台分布式仿真支撑系统提供的RTI架构结合二者的优点,采用了分层对称RTI的体系构架。分布式系统的管理由全局RTI来组织,各个仿真节点间的正常交互分散至本地RTI来管理,各个仿真节点可以动态加入或者离开系统,这种动态变化并不影响整个系统的正常运行。全局RTI和本地RTI采用完全对称的结构,双方角色根据部署情况可动态改变,最大限度地增加了系统的灵活性。
分布式汽车电气电子系统设计和实现架构
分布式汽车电气电子系统设计和实现 架构
分布式汽车电气/电子系统设计和实现架构在过去的十几年里,汽车的电气和电子系统已经变得非常的复杂。今天汽车电子/电气系统开发工程师广泛使用基于模型的功能设计与仿真来迎接这一复杂性挑战。新兴标准定义了与低层软件的标准化接口,最重要的是,它还为功能实现工程师引入了一个全新的抽象级。 这提高了软件组件的可重用性,但不幸的是,关于如何将基于模型的功能设计的结果转换成高度环境中的可靠和高效系统实现方面的指导却几乎没有。 另外,论述设计流程物理端的文章也非常少。本文概述了一种推荐的系统级设计方法学,包括、分布在多个ECU中的网络和任务调度、线束设计和规格生成。 为什么需要AUTOSAR? 即使在同一家公司,“架构设计”对不同的人也有不同的含义,这取决于她们站在哪个角度上。物理架构处理系统的有形一面,如布线和连接器,逻辑架构定义无形系统的结构和分配,如软件和通信协议。当前设计物理架构和逻辑架构的语言是独立的,这导致相同一个词的意思能够完全不同,设计团队和流程也是独立的,这也导致了一个非常复杂的设计流程(如图1所示)。
图1:物理和逻辑设计流程。 这种复杂性导致了次优设计结果,整个系统的正确功能是如此的难于实现,以致于几乎没有时间去寻求一种替代方法,它可导致更坚固的、可扩展性更好的和更具成本效益的解决方案。为了实现这样一种解决方案,设计师需要新的方法,它能够将物理和逻辑设计流程紧密相连,并依然允许不同的设计团队做她们的工作。 新兴的AUTOSAR标准为系统级汽车电子/电气设计方法学提供了一个技术上和经济上都可行的选择,尽管它主要针对软件层面,即逻辑系统的设计。不过,大量广泛的AUTOSAR元模型及其丰富的接口定义允许系统级电子/电气架构师以标准的格式表示她的设计思想。从经济上看,AUTOSAR标准打开了一个巨大的、统一的市场,它使得能够创立合适的设计工具。
分布式系统的管理
分布式系统论文 报告(论文)题目:分布式系统的管理 作者所在学院:信息工程学院 作者姓名: 作者学号:
分布式系统的管理 摘要 分布式系统作为网络上的重要软件系统之一,众多学者对它的研究从未停止。由于人们对分布式系统的高可靠性的需求,使得对分布式系统的管理的研究变得相对比较重要。本文详细讲解有关分布式系统管理的相关概念,内容等,希望能为分布式网络系统的使用带来便利。 关键词:分布式,管理,系统 Abstract A distributed system as one of the important software system on the network, many scholars never stop researching it. Due to people demand for the high reliability of distributed system, it makes the study of distributed system management is relatively important. The article describe in detail the related concepts of distributed system management, content and so on. We hope that we can bring convenience for the use of the distributed network system. Key words: distributed, management ,system 1.引言 分布式系统具有高度的内聚性和透明性,它与传统的网络有很大的不同,网络和分布式系统的区别主要在高层软件,更多的是操作系统,而不是硬件。分布式系统的基本特征主要有以下两方面:一个分布式系统是由一组网络连接的具有独立功能的计算机,在一套特殊软件的管理下,整个系统在用户面前呈现为一个透明的整体;一个分布式系统是一组位于网络计算机上的并发构件,这些构件之间的通信以及任务协调都只能通过信件传递进行,其目的是实现资源共享。由基本的分布式系统定义,我们可以知道,对分布式系统的管理是保证计算机通信可靠性的前提。本文将就分布式的系统管理进行相关的介绍,旨在加深人们对分布式系统管理的理解。 2.分布式系统管理的概念 首先,我们要了解什么是系统管理?从时间和空间两方面进行分析得出,系统管理是系统管理者在管理环境中,通过管理平台运行管理应用,从而控制系统正常运行的一系列活动。那么,究竟什么是分布式系统的管理呢?通过反复的研究,我们得出以下比较全面的概念:系统管理员通过网络各节点上独立的操作系统和全在系统集成的操作环境中,运行管理应用,对系统资源(用户,任务,硬件,软件,网络)进行分布式控制,从而保证系统正常运行,并能充分发挥分布
微软飞行模拟器10操作
模拟器命令按键显示/隐藏ATC窗口` (重音符号) 退出FS Ctrl + C 立即退出FS Ctrl + break 显示帧数等信息Shift + Z (多按几次) 全屏模式切换 Alt + Enter 摇杆启用开关 Ctrl + K 显示/隐藏膝板 F10 (多按几次) 显示菜单 Alt 暂停 P 重置当前飞行 Ctrl + ; (分号) 保存飞行 ; (分号) 选择第一项 1 选择第二项 2 选择第三项 3 选择第四项 4 减小 - (减号) 慢慢减小 Shift+ - (减号) 增大 = (等号) 慢慢增大 Shift+ = (等号) 声音开关 Q 时间压缩选择 R (+或–) 自动驾驶命令 空速保持开关 Ctrl + R 空速选择 Ctrl + Shift + R 高度保持开关 Ctrl+ Z 高度选择 Ctrl + Shift + Z 进近模式开关 Ctrl + A 姿态保持开关 Ctrl + T 自动油门预位 Shift + R 起飞/复飞推力 Ctrl + Shift + G 反向进近模式开关 Ctrl + B 飞行指引针开关 Ctrl + F 航向保持开关 Ctrl + H 航向选择 Ctrl + Shift + H 进近航向道保持开关 Ctrl + O 马赫保持开关 Ctrl + M 自动驾驶主开关 Z Nav 1保持开关 Ctrl + N 平直飞行开关 Ctrl + V 偏航阻尼器开关 Ctrl + D 操纵面命令 副翼向左配平 Ctrl + NP 4 副翼向右配平 Ctrl + NP 6 左倾(副翼) NP 4 右倾(副翼) NP 6 将副翼和尾舵回中 NP 5 升降舵向下配平 NP 7 升降舵向右配平 NP 1 襟翼完全放下 F8 襟翼放下一档 F7 襟翼完全收起 F5 襟翼收起一挡 F6 下倾(升降舵) NP 8 上倾(升降舵) NP 2 尾舵向左配平 Ctrl + NP 0 尾舵向右配平 Ctrl + NP Enter 使用尾舵向左偏航 NP 0 使用尾舵向右偏航 NP Enter 扰流板预位 Shift + / (除号) 扰流板/减速板开关 / (除号) 水舵收/放 Shift + W 引擎命令 对于多引擎飞行器,除非 你先按下E+引擎号(1-4) 选择单个引擎,否则你的 操作将对所有引擎生效。 要恢复对所有引擎的控 制,先按住E,然后快速 连续地按下所有引擎号(E, 1, 2,…) 引擎除冰开关 H 自动启动引擎 Ctrl + E 化油器加热/引擎除冰 H 引擎选择 E 启动器选择 J 磁电机选择 M 增大混合比 Ctrl + Shift + F3 减小混合比 Ctrl + Shift + F2 混合比设置显示/隐藏膝 板 显示菜单 暂停 重置当前飞行 保存飞行 起飞/复飞推力 自动油门预位 姿态保持开关 进近模式开关 高度选择 高度保持开关 平直飞行开关 偏航阻尼器开 操纵面命令 副翼向左配平 副翼向右配平
仿真驾驶体验飞行模拟器的应用与案例
仿真驾驶体验飞行模拟器的应用与案例 幻视联创是国内顶级的飞行模拟器研发机构,多少年来走过了无数的风风雨雨,为飞行模拟行业带来了一次又一次的创新。幻视联创本着一颗爱国的心,为我国军事、航天做出了突出贡献。中国航空研究院院长表示:“航空航天飞行模拟是我国大力发展的科学项目,我们不可能用真实的设备去实验,因为经费太高危险性非常大,所以高精准的模拟设备是最佳的选择,同时对模拟系统的要求也非常之高,要完全吻合真实飞行,无形中就加大了模拟飞行研发的难度,在多次探索中发现幻视联创的飞行模拟器可以满足基本的要求,达到飞行效果。” 国家机构的大力响应,让幻视联创飞行模拟器研发机构家喻户晓,各大商业、地产机构趋之若鹜的纷纷订购与租赁飞行模拟器来提高自己的人气。新光天地购物中心陈设飞行模拟器,众多消费者竞相参观体验,给消费者带来了前所未有的新鲜感,体验式盈利模式从此兴起。而万科房地产活动为取得爆炸式盈利效果,租赁了幻视联创飞行模拟器,仅用7天的时间让盈利效果翻了几倍,可谓是小投入大收入。 幻视联创飞行模拟器为何有如此大的魅力?其原因在于飞行模拟器由真实的座舱、运动模拟系统、视景模拟系统、指挥台以及高级计算机系统组成,姿态
仪、导航仪、引擎参数仪表、飞行摇杆、引擎操纵杆、方向舵、通讯系统等设备也一应俱全。座舱结构细致到每一个棱角,完全按照A380座舱1:1的比例所设计,它以一种无法抗拒的魔力深深的吸引你,激起你的驾驶欲望。飞行模拟器的系统可精确地模拟出飞行高度、速度、姿态、方位、位置等参数,由机场起飞、空中飞行、到降落全程模拟,空中飞行时可遇到雾天、强气流、雷雨等各种气候,飞行模拟器的视景也开始晃动,让飞行驾驶增添了挑战兴趣。其高保真的声音系统模拟出逼真的声音的效果,让飞行驾驶更加身临其境。 近期幻视联创接到了来自美国联合航空公司的传真,想要订购幻视联创的飞行模拟器,幻视联创的董事长问:“为什么要选择我们的飞行模拟器?国外有很多这种开发机构的。”美国联合航空公司给的回答:“原因有两方面,一是飞行系统,二是设备价格,我们考察了很多飞行系统开发机构,你们的飞行系统精确度是最高的,相对国外的开发机构相差无几,同时又比国外的设备价格低很多,我们当然会选择贵公司的设备”。
飞行模拟器实习报告.doc
飞行模拟器实习报告 本学期上海工程技术大学飞行学院举行了飞行模拟武器实习。作为飞行学院的一名大三学生,我参加了这次模拟机实习。本次实习分为三个阶段:1、陆总的《YGI概念型模拟器飞行操作教程》的讲座; 2、上机训练; 3、教员和老师的讲评。 此次实习的目的:本实习是飞行技术专业本科生的一项专业实习,其目的是通过对YGI概念型模拟器飞行操作教程的学习,加深对所学专业的理解,明确实习目的。要求学生通过上机训练,将课本所学的理论知识与实际操作相结合,掌握飞行的一般程序和基本操作方法,初步学会机组资源管理,考察学生的飞行综合能力,为后续去国外航校的飞行训练奠定基础。 一开始在没有学习专业课的时候,大一下学期我们也参加了一次飞行模拟器的飞行训练,但是由于什么都不知道,根本不知道也记不清楚当时我们学会了些什么,我们飞了些什么。这次实习前陆总给我上了一场讲座——《YGI概念型模拟器飞行操作教程》,介绍了上海工程技术大学飞行学院YGI概念型模拟器驾驶舱布局与设备和现代民用大型运输飞机的基本飞行操纵方法。其内容包括了设备及仪表、飞机的性能,正常飞行程序、非正常飞行程序和飞行检查单。在设备与仪表中,飞行姿态显示器是最重要的。它的功能是:显示了飞机的俯仰与坡度—飞行姿态;飞行速度;飞行高度;升降速率;显示航向还有ADF指针等等。飞机性能主要看以下几个数据:起飞速度,着陆速度,起飞滑跑距离,着陆滑跑距离,巡航速度,最大巡航速度等
等。让我记忆最深刻的是起飞速度,其中V1(决断速度其大小等于135海里/小时)、VR(抬轮速度138海里/小时)、V2(其大小为143海里/小时)很重要,起飞的时机要把握好。正常飞行程序分为:驾驶舱检查程序、发动机启动程序、滑行前程序、滑行程序、起飞前程序、起飞程序等等。在起飞前,这些程序都要一步一步做的,副驾驶配合机长完成,且必须做的眼到手到。这是为了检查飞机的状态是否能够安全起飞。非正常飞行程序虽然很少见,但是也有发生的,下面我来介绍一下非正常飞行程序。出现非正常情况有这些因素:中断起飞、一台发动机失效(V1后继续起飞)、单发目视进近、单发复飞、发动机发生火警、两台发动机失效、陆地迫降、起落架发生故障、襟翼发生故障。这些问题一旦出现就一定要执行非正常检查单,飞行员一定要冷静处理,相信自己的技术,因为我们的目标就是建立一个安全舒适的飞行环境。通过陆总的讲座以及我学习的专业课知识,以上便是我的一些学习心得。
某型飞机飞行模拟器的设计与实现
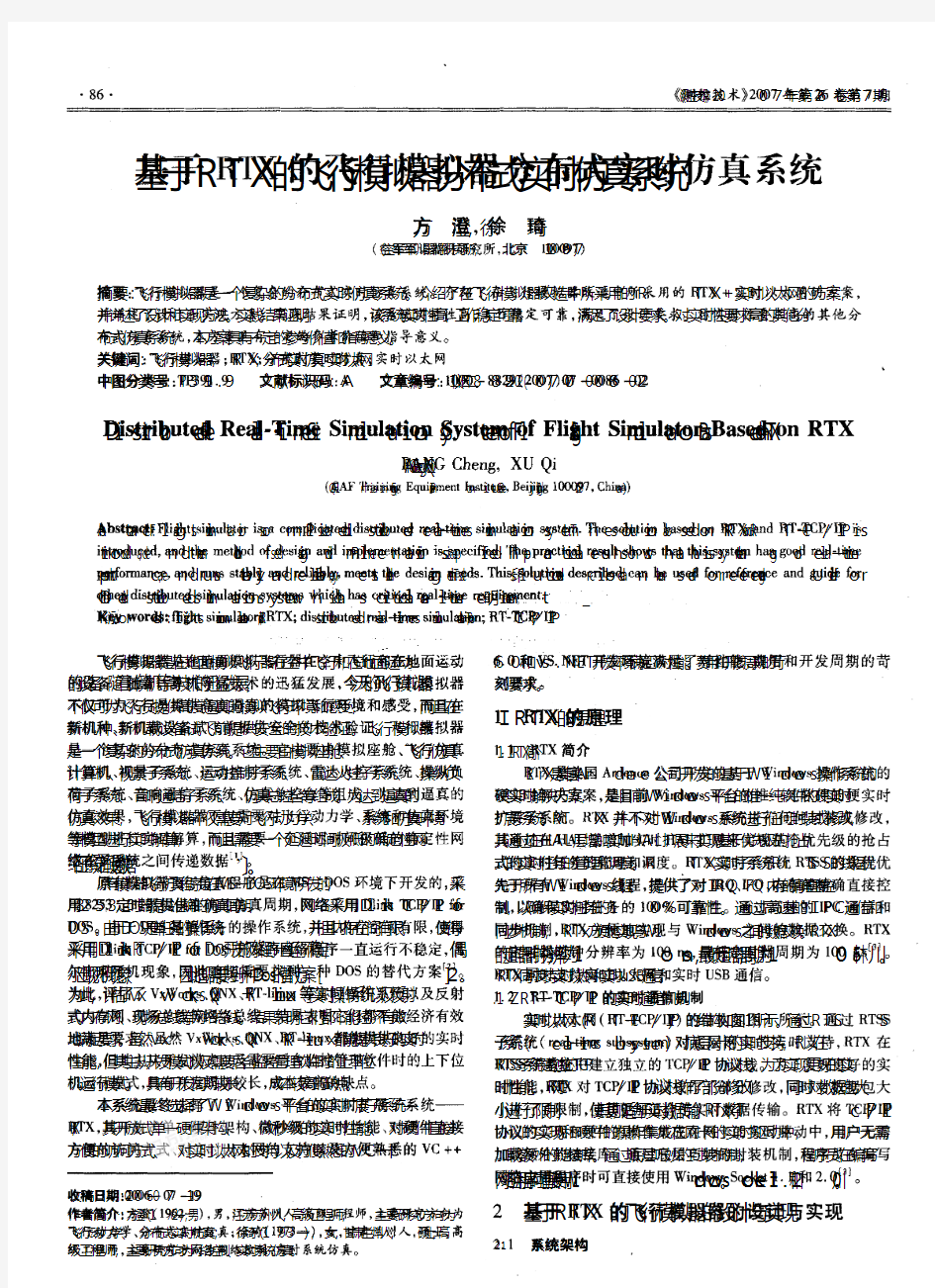
仿真器与仿真设备 357 某型飞机飞行模拟器的设计与实现 李军姜国卫 (空军军训器材研究所,北京,100089) 摘要:某型飞机是我军的新型作战飞机,设备复杂。为使部队训练手段现代化,提高部 队训练质量和训练效益,尽快增强部队战斗力,保障飞行安全,我们研制了该型飞机的飞行 模拟器。该模拟器以基本驾驶飞行技术和战术训练为重点,用于飞行员和领航员的改装、技 术和战术训练,是国内首次研制成功的集飞行员和领航员训练于一体的大型飞行模拟器,系 统规模大,技术难度高。本文介绍了该型飞机飞行模拟器的设计与实现,包括模拟器的功能、系统组成、技术特点和使用情况。 1 引言 某型飞机是我国自行研制的超音速歼击轰炸机,主要用于突击敌战役纵深目标和敌中型以上水面舰船,在不带对地(海)攻击武器情况下,也可作为歼击机执行为轰炸机群和舰船护航、同机护航、远程截击及歼灭空中敌机等空中作战任务。该型飞机具有良好的低空飞行特性、较大的作战半径和载弹量。与国产其它飞机相比,该型飞机由前驾驶员和后领航员两个座舱组成,机载设备数量大、功能多、技术新,系统复杂。自从该型飞机装备部队以来,一直没有相应的模拟器供部队使用。由于新技术、新设备的大量使用,飞机的综合性能及武器装备由简单变复杂,由单一变组合化。作为飞行人员,在一定的飞行时间内已经很难熟练掌握飞行操纵技能和机载装备的使用方法,灵活应用于战术科目的演练就更加困难,更无法掌握临界参数状态下的特情处置方法。因此,训练手段模拟化,是形势发展的需要。为使部队训练手段现代化,提高部队训练质量和训练效益,尽快增强部队的战斗力,保障飞行安全,给飞行人员提供一套具有真实场景,实时仪表,如身临其境般感觉的训练仿真设备是十分必要的,也是非常迫切的。 2 基本组成与原理 该型飞机飞行模拟器是以基本驾驶飞行技术和战术训练为重点的多任务训练模拟器,用于该型飞机飞行员和领航员的改装、技术和战术训练。 该型飞机飞行模拟器是一台人在回路里的大型、实时仿真系统,其组成框图及控制关系如图1所示。该模拟器由前舱主控计算机、杆力计算机、教控台计算机、前舱雷达计算机、平显计算机、后舱主控机、后舱雷达计算机、GPS计算机、全向告警器计算机、导弹指挥仪计算机、图形工作站和网络服务器等12台计算机通过网络系统构成,是以计算机为核心的复杂的人机闭环实时仿真系统。其中各个子系统均与计算机交连构成各自的闭环。飞行员、领航员、飞行教员、主控机、各子系统又组成了一个大闭环。
分布式控制系统课程设计
分布式控制课程设计 设计题目:课题八:3台电动机的顺序控制 学校:上海工程技术大学 院系:机械工程学院
二任务描述: 在现代工业生产中,电动机自动与手动正反转的设置得到了广泛的应用。设计三台电动机的顺序控制程序的原则是: (1)自动每隔离十分钟启动一台电机,中间可急停,到了八小时后都自动关闭。 (2)手动顺序启动,手动反序停止。 设计四段程序,第一段是自动顺序启动三台电机,由SB1总起T0,T1延时触发。第二段程序是到点自动停止,每个电机配备一个定时器加计数器来实现。第三段程序是手动顺序启动由SB2总起,T5,T6延时触发。第四段程序是手动反序停止由中间继电器M1.0,M1.1,M1.2线圈触发,而在第三段程序的起停保电路中用它们的常闭触点来实现。 控制任务和要求: (1)启动操作:按启动按钮SB1,电动机M1启动,10s后电动机M2自动启动,又经过8s,电动机M3自动启动。 (2)停车操作:按停止按钮SB2,电动机M3立即停车;5s后,电动机M2自动停车;又经过4s,电动机M1自动停车。 (3)要求启动时,每隔10min依次启动1台,每台运行8h后自动停车。在运行中可用停止按钮将3台电动机同时停机。 三电动机及其PLC控制器的介绍 1.系统设计功能 1)电路设计 本课题的三台电动机应满足以下要求 (1)自动时,当第二台电动机延时启动时,不关闭第一台电动机。当第三台电动机延时启动时,不关闭第一,第二台电动机。且三者自各自启动就开始计数器计时,准备 关闭。 (2)用急停按钮使三台电动机同时停移,但时间必须在自动停止时间范围内。 (3)手动时,当第二台中动机延时启动时,必须等三台电动机按顺序都启动后才可以按下手动反序停止按钮,使他们各自停止。 2)主电路设计 由三台电机组成,启动电路由自动开关QF0.,接触器KM0-KM3.热继电器FR1-FR3各台电
飞行仿真技术
象条件,以及白天、黄昏、夜间的不同时刻景象。 操纵负荷系统:给飞行员提供操纵载荷力的感觉。运动系统给飞行员提供运动感觉,目前常采用的六自由度运动系统能提供瞬时过载,但不能提供持续过载,持续过载的模拟可采用离心机、抗荷服、过载座椅等。 3.一般要求 飞行模拟器的一般要求包括如下几个方面: (1)功能要求 能按照所模拟飞机和要求完成下列操作科目:飞行前准备、地面操作、起飞、爬升、巡航、下降、进近、中断进近、地面可视段和着陆、风切变、地面操纵(着陆后)、发动机关车及停机。 (2)仿真计算机用到的建模源数据要求 仿真计算机是飞行模拟器的核心部分,其数学建模用到的数据一般应为模拟目标飞机的真实数据。在确实没有飞机源数据的情况下,允许采用经验数据。对于新型号飞机尚未进行试飞的情况下,运行采用预测数据。当具备飞机的试飞数据后,应及时对经验数据和预测数据进行修改。建立的数学模型必须经过验证,通过与真实系统响应特性和数据的比较来进行验模的工作。
(3)对人感系统的要求 受训飞行员的感觉有操纵力感、眼睛对窗外视景和舱内仪表的感觉、耳朵对声音的感觉和身体对飞机运动的感觉。为给飞行员造成一个真实的飞行环境,飞行模拟器通常要求具体如下人感系统: 操纵负荷系统:模拟飞机的操纵感觉和配平感觉。 视景系统:模拟飞机座舱外的景象,是飞行员判断飞行品质十分重要的视觉信息。 仪表系统:在座舱仪表板按所模拟飞机座舱的布局按照飞行仪表和多功能显示设备,其外形、表盘和静、动态性能应与所模拟的飞机仪表完全一致。 运动系统:用于驱动整个模拟座舱运动,模拟飞机的空中和地面运动。通常希望采用六自由度运动系统反映飞机的三个角位移和三个直线位移的运动。 过载感觉系统:飞行员在空中感受的过载只靠运动系统是不能实现的,可采用抗负荷和过载座椅来实现。 飞行模拟器生产企业介绍 成立于2010年的福州正辉信息科技有限公司是一家集研制开发、生产、服务为一体的专业化高科技企业。该公司专注于仿真模拟器的研制,是目前中国最大的学习应用软件和特殊装备智能仿真模拟体验系统提供商之一。正辉科技一直秉承一切以客户价值为依归的经营理念,始终处于稳健、快速发展的状态。2013年5月,正辉科技的企业客户数量突破3000家;目前,正辉科技学习应用软件荣获中国软件著作权许可和中国IT产业最具竞争力品牌金奖,中国软件行业
分布式系统架构设计
本文作者Kate Matsudaira是一位美丽的女工程副总裁,曾在Sun Microsystems、微软、亚马逊这些一流的IT公司任职。她有着非常丰富的工作经验和团队管理经验,当过程序员、项目经理、产品经理以及人事经理。专注于构建和操作大型Web应用程序/网站,目前她的主要研究方向是SaaS(软件即服务)应用程序和云计算(如大家所说的大数据)。 本文是作者在AOSA一书介绍如何构建可扩展的分布式系统里的内容,在此翻译并分享给大家。 开源软件已经成为许多大型网站的基本组成部分,随着这些网站的逐步壮大,他们的网站架构和一些指导原则也开放在开发者们的面前,给予大家切实有用的指导和帮助。 这篇文章主要侧重于Web系统,并且也适用于其他分布式系统。 Web分布式系统设计的原则 构建并运营一个可伸缩的Web站点或应用程序到底是指什么?在最初,仅是通过互联网连接用户和访问远程资源。 和大多数事情一样,当构建一个Web服务时,需要提前抽出时间进行规划。了解大型网站创建背后的注意事项以及学会权衡,会给你带来更加明智的决策。下面是设计大型Web系统时,需要注意的一些核心原则: ?可用性 ?性能 ?可靠性 ?可扩展 ?易管理 ?成本 上面的这些原则给设计分布式Web架构提供了一定的基础和理论指导。然而,它们也可能彼此相左,例如实现这个目标的代价是牺牲成本。一个简单的例子:选择地址容量,仅通过添加更多的服务器(可伸缩性),这个可能以易管理(你不得不操作额外的服务器)和成本作为代价(服务器价格)。 无论你想设计哪种类型的Web应用程序,这些原则都是非常重要的,甚至这些原则之间也会互相羁绊,做好它们之间的权衡也非常重要。 基础
分布式人事管理系统设计与实现
分布式人事管理系统设计与实现 摘要:随着信息技术的日益发展和计算机及网络的技术的普遍应用,随着管理改革的深入,各部门之间的工作量也随之加重,旧的管理方式的方法已无法满足现代的科学管理飞速的需要。因此有必要利用现代PC技术和分布式数据库开发技术,在网络环境下建立基于分布式数据库的信息管理系统。 关键词:计算机;分步式;人事管理;数据库 中图分类号:TP311文献标识码:A 文章编号: 1009-3044(2008)32-1114-02 Distributed Personnel Management System Design and Implementation SONG Jun-rong (Huaibei City of Anhui Province, Mountain-building,Huaibei 235000,China) Abstract: With the increasing development of information technology and computer and network technology widely used, with the depth of management reform, among the various departments and also increase the workload, the old management methods have been unable to meet the modern scientific management of rapid . It is therefore necessary to use
分布式多媒体可视化交互管理系统方案
PMIPS分布式多媒体可视化交互管理系统 广州拓视悦声电子科技有限公司 版本:2016-V1.1 1/ 16
目录 一、应用需求分析 (3) 二、传统应用解决方案 (4) 2.1传统应用系统组成 (4) 2.2传统应用系统缺陷........................................ 错误!未定义书签。 三、PMIPS应用解决方案 (5) 四、PMIPS系统功能 (6) 五、PMIPS系统优势 (10) 六、PMIPS系统特色 (13) 七、PMIPS系统配置 (15) 2/ 16
一、应用需求分析 在当前,各类用户的会议室、多功厅、指挥中心等场所的音视频系统需求特征如下: ?前端信号类型多,有笔记本电脑、高清摄像机等,涉及到的接口、信号格式、协议繁多; ?要求兼容性好,扩展方便; ?信息任意调用,传输分享方便, 采用屏蔽网线或光纤传输,大大简化布线(极大的节省布线成本和人工)和提高信号传输的安全性和减少外界干 扰。 ?描述一:(针对会议室) 强大图像处理,可以实现会议视频VGA/DVI/HDMI/3G-SDI/YCBCR 视频、计算机/电脑网络信号等信号混合同屏显示,支持所有输入信号 源在不同地点的任意显示屏终端上(包括投影机、液晶电视、显示器) 任意显示,可以实现单屏幕多画面处理(包括放大、缩小、多画面显示、 叠加等)。 ?描述二:(针对指挥中心) 强大图像处理,可以实现会议视频VGA/DVI/HDMI/3G-SDI/YCBCR 视频、计算机/电脑网络信号等信号混合共屏显示,支持所有输入信号 源在不同地点的任意显示屏终端上(包括投影机、液晶电视、显示器、 DLP背投拼接墙、LCD液晶拼接墙、PDP等离子拼接墙等)任意显示, 可以实现各种信号任意全墙漫游(包括单屏、跨屏、全墙显示、组屏显 示)、任意大小缩放显示。 ?清晰自然的声音效果; ?信息实时保存和回放; ?操作界面简单、快速、明细; 3/ 16
驾驶模拟器说明书
BZ2012-1最新款豪华型汽车驾驶模拟器 BZ2012-1型驾驶模拟器是我公司根据最新的驾驶员培训大纲和最新的驾驶模拟器行业标准(JT/T398-2011)开发而成的最新产品,驾驶座舱进行了大量技术创新和改进,并配置了最新的“BZ-2011驾驶模拟器软件V1.2”。 一、座舱 座舱由驾驶舱座,视景计算机,视屏(19寸显示器),操作传感器,数据采集卡,耳机和话筒等组成。 座舱包含了与真实车辆相同的操作部件,“五大”操纵机构:方向盘、离合器,脚刹,油门和手刹。真车变速器:倒档、一档、二档、三档、四档、五档和空挡(自动档只含前进档、倒车档和驻车档)。真车操作开关:左转向灯、右转向灯、应急灯、喇叭、点火开关、总电开关、安全带、车门、雨刷、远光灯、近光灯、远近光交替。
座舱既可以进行联网训练,也可以进行单机训练。利用主控台计算机,最多可以将30台座舱连接到一个训练场景进行训练。 学员通过操作不同的操作部件,经过各自的传感器产生不同的操作信号,这些操作信号通过数据采集卡传送给计算机,经过各种训练模型的逼真运算,最后在视屏上输出与操作相对应的三维场景与各种声音。 二、主要功能 驾驶舱配备最新的BZ2012-1驾驶模拟器软件V1.2版,该软件为我公司最新开发完成,具有自主知识产权。 软件采用汽车多自由度数学模型,实现汽车转向、制动和加速的逼真模拟;另外利用最新的计算机技术,实现真实的三维场景及逼真的声音模拟。 训练按照三个难度级别分别进行训练:初级驾驶,中级驾驶和高级驾驶。 BZ2012-1驾驶模拟器软件技术指标 训练车型选择场地训练选择界面 城市道路选择乡村道路选择 面板提示语(关键词语):
飞行模拟器飞行仿真技术由此开始
随着计算机和软件技术的发展,飞行模拟器的性能不断提高,已经成为保障飞行安全、大幅度提高飞行人员及机组人员的技能、缩短飞行人员训练周期、降低训练成本,以及提高训练效率的不可缺少的重要训练装备。飞行训练基地采用飞行模拟器,不仅可以提高飞行员训练水平,促进航空安全指标提升,确保飞行自主训练工作顺利实施,而且今后在飞行模拟训练上将拥有更大的自主性、自控权,并可根据飞行员的特点,有针对性地展开飞行训练,进一步提高各种训练强度。 1.定义 通俗定义:飞行模拟机就是通过电子计算机的建模运算以在地面上最大程度逼近飞机真实飞行状态,从而给飞行员营造一种全方位、多知觉、多飞行状况的真实操纵感。 严格定义:是指用于驾驶员飞行训练的航空器飞行模拟机。它是按特定机型、型号以及系列的航空器座舱一比一对应复制的,它包括表现航空器在地面和空中运行所必需的设备和支持这些设备运行的计算机程序、提供座舱外景像的视景系统以及能够提供动感的运动系统。 2.工作原理 为达到模拟飞行目的,研制者需要对模拟目标飞机飞行全过程涉及的各种动态特性建立数学模型,预编好程序并嵌入计算机运行,程序在接收到操作人员(一般为受训飞行员)的操纵信号后实现接近真实飞行的响应。具体来讲,飞行模拟机一般由仿真控制台(飞行员驾驶舱)、仿真计算机、仿真环境、飞行员共四部分组成的一个封闭反馈系统,如上图所示。其研制核心和难点在于仿真计算机,该部分的飞行动力学数学模型、系统模型、仿真环境模型、外干扰模型在经计算机求解后,通过运动系统、视景系统、音响系统给飞行员营造一种多维感知信息 的仿真环境,从而让飞行员感觉到自己犹如在空中真实操纵“飞机”一样。各主要系统简述如下: 模拟座舱:应根据需求选择其布局与特定型号飞机或组类飞机一样。模拟座舱内的仪表系统实时指示或显示各种飞行参数和系统参数。
分布式文件系统设计方案
分布式文件系统(DFS)解决方案 一“分布式文件系统(DFS)”概述 DFS并不是一种文件系统,它是Windows Server System上的一种客户/服务器模式的网络服务。它可以让把局域网中不同计算机上的不同的文件共享按照其功能组织成一个逻辑的分级目录结构。系统管理员可以利用分布式文件系统(DFS),使用户访问和管理那些物理上跨网络分布的文件更加容易。通过DFS,可以使分布在多个服务器或者不同网络位置的文件在用户面前显示时,就如同位于网络上的一个位置。用户在访问文件时不再需要知道和指定它们的实际物理位置。 例如,如果您的销售资料分散在某个域中的多个存储设备上,您可以利用DFS 使其显示时就好像所有的资料都位于同一网络共享下,这样用户就不必到网络上的多个位置去查找他们需要的信息。 二部署使用“分布式文件系统(DFS)”的原因 ●访问共享文件夹的用户分布在一个站点的多个位置或多个站点上; ●大多数用户都需要访问多个共享文件夹; ●通过重新分布共享文件夹可以改善服务器的负载平衡状况; ●用户需要对共享文件夹的不间断访问;
●您的组织中有供内部或外部使用的Web 站点; ●用户访问共享文件需要权限。 三“分布式文件系统(DFS)”类型 可以按下面两种方式中的任何一种来实施分布式文件系统: 1.作为独立的分布式文件系统。 ●不使用Active Directory。 ●至多只能有一个根目录级别的目标。 ●使用文件复制服务不能支持自动文件复制。 ●通过服务器群集支持容错。 2.作为基于域的分布式文件系统。 ●必须宿主在域成员服务器上。 ●使它的DFS 名称空间自动发布到Active Directory 中。 ●可以有多个根目录级别的目标。 ●通过FRS 支持自动文件复制。 ●通过FRS 支持容错。 四分布式文件系统特性 除了Windows Server System 中基于服务器的DFS 组件外,还有基于客户的DFS 组件。DFS 客户程序可以将对DFS 根目录或DFS 链接的引用缓存一段时间,该时间由管理员指定。此存储和读取过程对于
分布式电源系统设计
分布式电源系统设计 2008-3-7 14:24:00 分布式电源系统不再使用统一的直流电源给系统供电,而是对系统中不同设备、不同电路板、甚至对同一电路板上不同的电路采用不同的电源供电。系统中低频电路和高频电路,小电流负载和大负载供电线路完全分离。特别在低电压大电流负载时,采用较高电压传输到负载附近再用DC—DC变换模块降压供给负载。系统中各电路的电源相对独立,减少了大电流传输线路,使系统的总效率有一定的提高,并且对可靠性和电磁兼容性问题也比较容易解决。 一、分布式电源系统结构 分布式电源系统可分为交流分布和直流分布两种基本结构。每一种结构都可以采用不同的变换模块在深度和广度两个方面扩展,当然两种结构也可以互相渗透。 (一)交流分布式电源系统 交流分布式电源系统由多个AC—DC变换模块组成,每一块电路板或一个装置拥有一个AC—DC变换模块,典型结构如图9—30所示。这种结构比较昂贵,因为每一个AC—DC变换模块都需具有整流滤波及抑制电磁干扰电路,也意味着交流电源线围绕整个系统,增加了电磁干扰敏感程度和安全问题。然而,在某些情况下这种结构可能是正确的方案。例如,某电信设备制造厂利用这种结构给某栋楼房中的电信设备供电。每层楼使用一个AC—DC模块,配电结构如图9—31所示。这种结构也应用于某电脑生产厂家的文件服务器中,如图9—32所示。图中CPU板和每一个磁盘驱动器都使用一个AC—DC模块电源。
(二)直流分布式电源系统 直流分布式电源系统是应用最广泛的一种结构。它一般包含一个交流前端AC—DC模块(或者多个前端模块并连,也可使用冗余技术),前端模块将交流电压变换成24、48V或300V的直流电压,形成直流分布总线。利用直流总线传输到系统中每一个负载板上,由负载板上的DC—DC变换模块再来产生负载需要的直流电压。这种DC—DC变换可能需要多次。例如,某负载板上需要5 V和2.1V两种直流电压,5V电压可利用一个DC—DC模块从48V总线获得,2.1V电压用另一个DC—DC模块从5V电压获得比较好。应该注意,在典型的电信设备中,前端模块不一定见到,因为48V直流总线也许从很远的地方传来,或许是由电池提供。直流分布式电源系统典型结构如图9—33所示。 直流分布式电源系统可根据系统的实际需要,采用如图9—34所示的三种分布方式之一。图9—34a采用按层分布方式,系统中的每一层设置一组DC—DC模块,为该层所有逻辑电路板或外围设备供电。图9—34b采用按功能分布方式,系统中每一种功能部件采用一组DC—DC模块供电。图9—34c采用单板分布方式。系统中每一个逻辑板或磁盘驱动器都由自己的DC—DC模块提供合适的电压、电流。例如,前面提到的文件服务器采用交流分布式电源系统,其实也可以采用直流分布式方案。下面我们给两种不同规模的文件服务器采用单板分布方案设计电源系统。中规模文件服务器包含一个CPU板和28个磁盘驱动器,分4层安装(每层7个驱动器),电源总功率小于750W;高端文件服务器包含一个CPU板和56个磁盘驱动器,分8层安装,电源总功率小于1500 W。两种文件服务器可采用相同类型的模块电源和同一方式的电源系统,只是模块电源的数量不同而已,因此,可节省相当大的开发时间和论证费用。首先需要750W的交流前端AC—DC模块将交流电源变换成48V直流电源。为了提高可靠性采用N+1冗余方案,中规模文件服务器前端模块需要1+1冗余,高端文件服务器前端模块需要2+1冗余。其次,给CPU板和每一个磁盘驱动器配置一个30W双路输出DC—DC模块就可以了。当然,对系统中每一个磁盘驱动器也可以使用N+1冗余方案,由于成本太高,如非特别需要一般不用。
模拟飞行驾驶舱
模拟飞行驾驶舱 在空中飞行一直是人们梦寐以求的事情,人们渴望在空中自由的飞翔,来得到更加自由欢快的感觉,对于每个人来说都如此。从发明飞机到今天,已经经历了漫长的历史,坐飞机已不再是难事,但是亲自驾驶飞机就不同了,它对于人的吸引力远远超越坐飞机,但是仅有极少数的人能体验飞机驾驶,这就体现出来了一个非常有前景的市场。 为满足人们对飞行驾驶的欲望,飞行模拟器诞生了,它可以真实的模拟空中飞行,自发明以来它满足了许许多多人的飞行驾驶梦想,不用驾驶真飞机,既安全又刺激。国内以幻视联创飞行模拟器为代表性,其功能很完善。飞行效果与真实飞行非常接近,例如:空气动力,气象,地理环境,飞行操控系统,飞行电子系统,地面飞行引导等,并通过外部硬件设备进行飞行仿真操控和飞行感觉回馈。 蒙古族中学科技馆架设飞行模拟器体验驾驶
如蒙古族中学科技馆中的A320飞行模拟器驾驶体验,幻视联创为其设计了更加美观大气的机舱外壳,并且配备了震动座椅系统,当空中遇到强气流以及颠簸时可及时在震动座椅上反馈,增加了飞行体验的真实感。飞行模拟器架设后,学生与老师的反馈很好,A320飞行模拟器不仅外观吸引人,操作起来的感觉跟真实客机非常相近。 哈尔滨招商贝肯山体验驾驶飞行模拟器 招商地产贝肯山活动,为增加人气,特邀幻视联创在超级仿真区打造了“贝肯山一号”飞行模拟器,并由两名空姐护驾,指导操作。“贝肯山一号”让人们真实的体验到了驾驶飞机的真实感觉,仿佛自己就是一个飞行员,驰骋在蓝天白云之间,许多小朋友与成年人都争先进行体验。
最近,高中生已经可以考取飞机驾照了,从国内对飞行大门的渐渐敞开与提倡,标志着我国飞行产业将会有非常美好的前景。随着国人对飞行的认识度逐渐提高,以飞行体验设备带动商业盈利将成为主流,以飞行模拟器来提高飞行技术将成为主要方式。
浅谈动感仿真模拟器在飞行领域的应用
浅谈动感仿真模拟器在飞行领域的应用 飞行模拟技术是达到研究飞机和实行飞机训练目的的最佳途径甚至是唯一途径。在飞行模拟器上,六自由度运动系统是飞行模拟器的重要载体,它能够提供飞机运动过程中飞行员能感觉到的瞬时过载动感、动力分量的持续感和部件抖动的冲击信息。在六自由度的飞行模拟器上可以逼真的实现俯仰、滚转、偏航、升降、纵向平移、侧向平移等六自由度瞬时过载仿真动作。 在六自由度运动系统中关键技术有,并联六自由度运动系统的机构学理论、关键机械零部件和控制策略。 1965年,D.Sstewart提出了将并联六自由度机构作为飞行模拟的关键技术。电液机构的六自由度运动平台是飞行模拟器的主体设施,它与串联机构相比具有结构布局合理、精度高、钢度大、运动速度快的特点,适合运用与高速、大负载的运动模拟器上。除此以外,还被运用与机器人、并联机床、飞船对接器以及各种精密仪器测试设备上。飞行模拟器除了并联机器人、并联机床等设备所需求的位移速度高的特点外,它更侧重与平台的加速度以及突发加速度变化率的控制精度,尤其是平台洗出运动时系统的低速平稳性,飞行模拟器所需要的运动指标更精密。 飞行模拟器六自由度运动系统的机构学理论的关键点在于设计出加工、装配工艺性好,运动范围大,精度高的球铰、十字铰等关节链组件。而六自由度机构的位置正解是并联结构的研究热点。在六自由度运动平台设计与控制中,机构的动力学模型的建立、受力分析、动力学响应等方面起到了重要的作用。飞行模拟器早期大部分使用的是液压驱动方式,随着电力电子的发展,电动驱动方式,气压驱动方式随之而出,但现代常用的电动驱动方式有负载能力有限的缺点。 运动平滑性是飞行模拟器六自由度运动系统的突出特点。根据军用标准(GJB2001-94),飞机模拟器洗出加速度要小于人体能感知的加速度阈值(约0.02g),运动平台中任何一个动作以频率为0.5HZ,幅值为其最大位移百分之10的正玄信号驱动时,加速度瞬时噪音峰值不大于0.04g。 六自由度运动系统采用了洗出滤波柔性控制和模糊控制系统,目前这是六自由度运动系统中最待改进、优化的地方。 武汉穆特科技有限公司,是一家专业从事仿真模拟器、六自由度并联机器人、电动伺服控制系统的研究、设计、生产、销售、以及售后服务的高新技术企业。拥有一批掌握现代高科技理论与技术的优秀技术人员和管理人员,其中在自动控制技术、仿真技术、计算机通讯技术、机械设计技术等方面有着完整的理论基础和实际工程经验。 浅谈飞行模拟器发展历程 1903年,莱特兄弟创造出人类历史上第一架配备动力装置、可以由飞行员自行操控的飞机。六年后,飞行模拟装置即应运而生。 目前已知最早的飞行模拟器,是1909年的一台专为“安托瓦内特”单翼飞机设计的训练器,其构造简单,外观如同一个剖成两半的木桶,附着于活动支架上。训练时,飞行员坐入座椅,旋转左右两侧的圆盘。两名助手站在地面,配合飞行员的操作,用力扳动固定于木桶底部的长杆,利用杠杆原理,模拟俯仰、滚转等动作。