0<(m in (b i ,d j )-m ax (a i ,c j ))/(b i -a i )&1
(3)
再次:
0<1/N <1
(4)
将式(3)、式(4)两式相乘,即得P i +(0,1)。
证毕。
另外,在分析其他业务对北斗系统的干扰时,必须考虑业务的主次划分以及重合频段业务的应用范围。这是因为虽然某些业务与北斗系统频段有大范围重合现象,但是如果这些业务仅在较少的区域(地区)被使用,则该业务对北斗系统的干扰概率也是较小的。那么,在频段B i 内潜在干扰概率P i 变形为:
P i =
(
N
j =1
j
N min (b i ,d j )-max (a i ,c j )(b i -a i )
(5)式中,
j 为干扰业务的业务量权重;0& j &1。记5种干扰业务(航空无线电导航、卫星地球
探测(有源)、空间研究(有源)、无线电定位、业余)的业务量权重分别为1、0.2、0.2、0.3和0.1(此处可以使用层次分析法(AH P)[12]进行权重确定,由于篇幅原因省去细节说明)。将分析结果代入式(5),得到P 1=0.5,P 2.0.197,P 3=0.16。B 1频段内的潜在干扰概率最大,B 2频段内的潜在干扰概率次之,B 3频段内的潜在干扰概率最小。
4 结 语
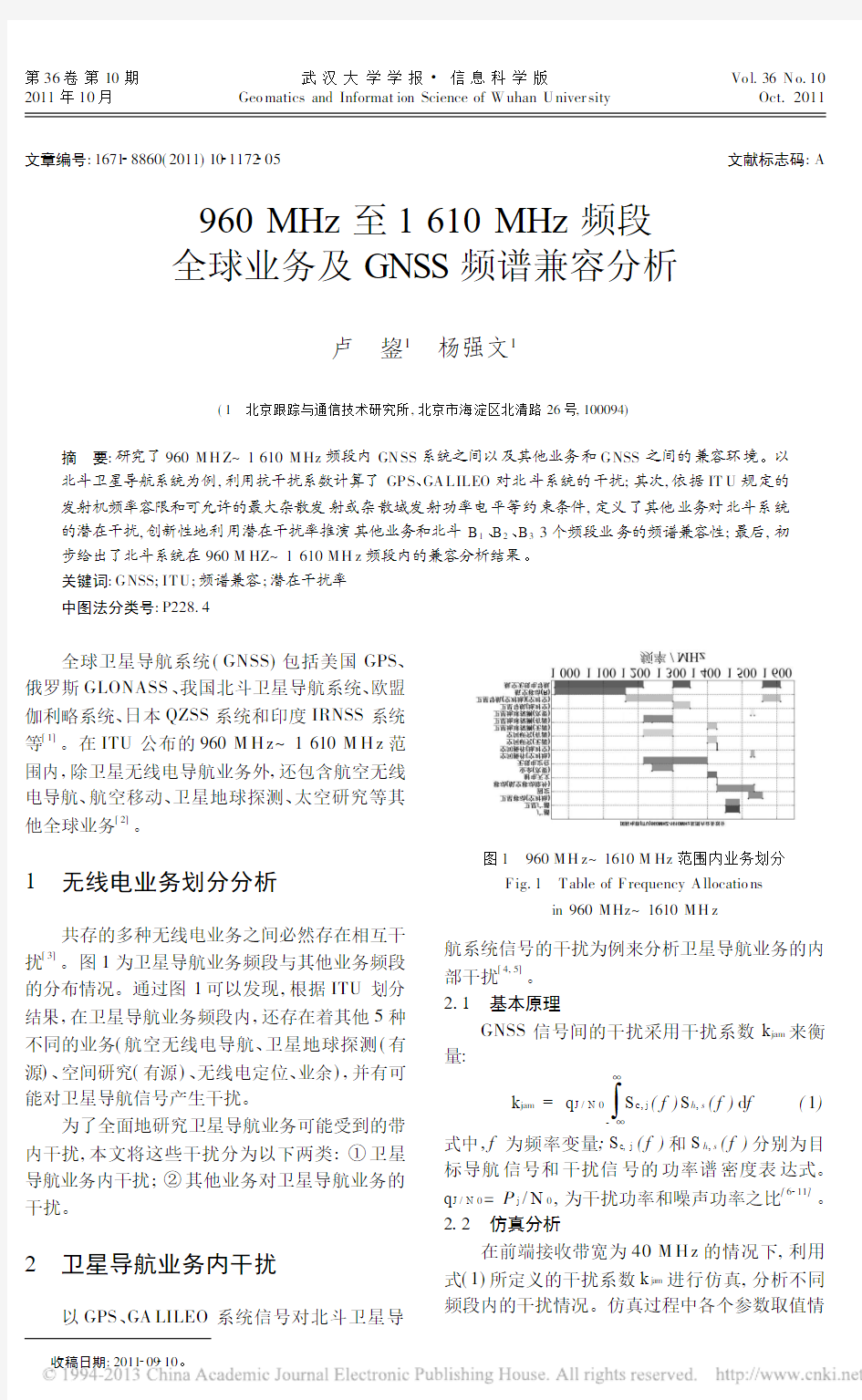
根据国际电信联盟的划分,GNSS 导航业务
频段主要集中在960M H z~1610M H z 范围。该频段除卫星无线电导航之外,还包含航空无线电导航、航空移动、卫星地球探测、太空研究等其他全球业务。
多种业务的共存必然会产生相互的影响,完整全面地分析该频段内的电磁兼容,能够有效保证GN SS 导航业务的发展,保护GNSS 用户的服务性能。
通过计算GPS 、GA LILEO 对北斗卫星导航系统干扰系数,并分析其他业务对北斗导航业务的潜在干扰概率,可以看出: 在卫星无线电导航业务间干扰方面,北斗卫星导航系统在B 1和B 2频段内可能受到的干扰较大,B 3频段较小;!在其他非卫星导航业务可能引起的潜在干扰方面,北斗卫星导航系统在B 1频段内可能受到的干扰最大,B 2居中,B 3最小。如图3所示。
图3 北斗系统各频段内两种干扰情况F ig.3 T w o Interfer ences in Each Band of
Beido u Sy stem
本文提出的频谱兼容性分析方法,同样可以分析其他无线电业务在IT U 框架下的电磁兼容性能。因此,该方法能够应用在国际电联频率协调业务中,能够为实现频谱保护提供理论依据。
参 考 文 献
[1] 刘经南.GN SS 连续运行参考站网的下一代发展方
向///地基地球空间信息智能传感网络[J].武汉大学学报 信息科学版,2011,36(3):253 256[2] Internatio nal
T elecommunicat ion
U nio n.
Radio
Reg ulatio ns vo lume I[OL ].http://eng.ntc.or.th/imag es/stor ies/pdf/frequency/Nat ional%20T able%20of%20F requency%20A llo cat ions%20December %201999.pdf,2011
[3] 黄坚,钟志峰.高频地波雷达电离层杂波抑制研究
[J].武汉大学学报 信息科学版,2011,36(2):249 251
[4] 刘文山,赵雯雯,王岗,等.
CO M P ASS 系统与
G NSS 系统兼容性分析[J].CSN C2010第一届中国
卫星导航学术年会,北京,2010
1175
武汉大学学报 信息科学版2011年10月
[5] 张铮文,寇艳红,刘建胜.发射信号不完善性对卫星
导航系统内及系统间干扰的影响分析[J].武汉大学
学报 信息科学版,2011,36(4):471 475
[6] European D ocument.Reference A ssumptions F or
G PS/G AL IL EO Compatibilit y A nalyses[R].Jo int
U nited St ates/Eur opean Do cument,2004
[7] T itus B M,Betz J W,H egar ty J,et al.I nter system
and Intr asystem Interfer ence Analysis M etho do lo gy
[C].IO N GPS/GN SS2003,Po rtland,OR,2003
[8] So ualle F.Intro ductio n of an Additio nal Radio
F requency Co mpat ibility Criter io n for Code
T r acking Per for mance[C].GN SS Sig nals&Sig nal
P rocessing2007,O berpfaffenhofen,G ermany,
2007
[9] A vila Ro dr ig uez J A,Hein G W.T he M BO C
M o dulation:T he F inal T ouch to the Galileo
F requency and Signal Plan[C].IO N GN SS20th
IT M,F ort W or th,2007
[10]W ang Y,Y ang S Y.Interfer ence A nalysis and
Simulat ion fo r G PS/G alileo Signals[C].ICM A
2009,Chang chun,2009
[11]Godet J,D e M ateo J C.A ssessing the Radio
F requency Compatibility Between GPS and
G aileo
[C].IO N GPS2002,Por tland,O R,2003
[12]金菊良,魏一鸣.复杂系统广义智能评价方法与应
用[M].北京:科学出版社,2008
第一作者简介:卢鋆,博士,研究领域:导航频率和信号体制设计与分析、兼容与互操作等。已发表论文10余篇。
E m ail:jun jun_lu@s https://www.360docs.net/doc/959661088.html,
International Wireless Operation and GNSS Spectrum Compatibility
Analysis in Band960MHz to1610MHz
L U J un1 YA N G Qiangw en1
(1 Beijing Institute of T racking an d T elecomm unications Techn ology,26Beiqing Road,H aidian District,Beijing100094,Ch ina)
Abstract:The spectr um compatibility analysis among GNSS and that betw een GNSS and other operations are fir stly adv anced in this paper.T he interfer ence of GPS and GALILEO to BeiDou is calculated w ith interference coefficient in the beginning.Consequently,accor ding to constraint conditions for transm itter frequency tolerances and m aximum per mitted pow er lev els for spur io us or spurious dom ain emissions set by ITU,the potential interference betw een other operations and GN SS is defined and is em ploy ed to o btain the interference betw een o ther oper ations and BeiDo u B1,B2and B3.Finally,spectrum com patibility of BeiDou in960M H z~1610M H z is g iv en in the paper.The analy sis metho d of spectrum com patibility pro posed here hold for the spectrum com patibility of other oper ations.
Key words:GNSS;ITU;spectrum compatibility;potential interfer ence pro bability
About the first author:LU Jun,doctor.Main research area:system design and an alysis on navigation frequency and signal,re search on compatibility an d in teroperability,published ten s of research papers.
E m ail:ju nju n_lu@https://www.360docs.net/doc/959661088.html,
1176
华星GNSS培训RTK野外操作篇
华星GNSS培训RTK野外操作篇
RTK作业流程 一.准备工作 a)检查和确认:基准站接收机、流动站接收机 开关机正常,所有的指示灯都正常工作,电 台能正常发射,其面板显示正常,蓝牙连接 是否正常; b)充电:确保携带的所有的电池都充满电,包 括接收机电池、手簿电池和蓄电池,如果要 作业一天的话,至少携带三块以上的接收机 电池; c)检查携带的配件:出外业之前确保所有所需 的仪器和电缆均已携带,包括接收机主机, 电台棍式发射天线和移动站接收天线,电源 线,电台到主机电缆,手簿等;- d)已知点的选取: i.避免已知点的线性分布(主要影响高程);ii.避免短边控制长边1; iii.作业范围最好保证在已知点连成的图形以内或者和图形的边线垂直距离不要超 过两公里; iv.如果只要平面坐标选取两到三个已知点进行点校正即可,如果即要平面坐标又要
高程,选取三个或四个已知点进行点校 正; v.检查已知点的匹配性即控制点是否是同一等级,匹配性差会直接影响RTK测量的 精度; e)G PS测量操作流程图: 架设好基准站,手簿新建项 连接基准站,设置基准站发射 连接移动站,设置移动站天线高 采集控制点,并进行参数转 进行碎步测量或者放样
收工,进行数据导出到电脑, 二.架设基准站 基准站一定要架设在视野比较开阔,周围环境比较空旷的地方,地势比较高的地方;避免架在高压输变电设备附近、无线电通讯设备收发天线旁边、树阴下以及水边,这些都对GPS信号的接收以及无线电信号的发射产生不同程度的影响。 手簿建立项目打开手簿点开,进入测量程序,点 项目菜单,进入项目信息界面 点新建,输入要新建的项目名称,确认。然后点项目信息-坐标系统
实验一利用DFT分析信号频谱
实验一利用DFT 分析信号频谱 一、 实验目的 1. 加深对DFT 原理的理解。 2. 应用DFT 分析信号的频谱。 3. 深刻理解利用DFT 分析信号频谱的原理,分析实现过程中出现的现象及解决方法。 二、 实验设备与环境 计算机、MATLAB^件环境。 三、 实验基础理论 1. DFT 与DTFT 的关系 方法二:实际在MATLAB 十算中,上述插值运算不见得是最好的办法。 由于DFT 是DTFT 的取 样值,其相邻两个频率样本点的间距为 —,所以如果我们增加数据的长度 N,使得到的 N DFT 谱线就更加精细,其包络就越接近 DTFT 的结果,这样就可以利用 DFT 计算DTFT 如果 没有更多的数据,可以通过补零来增加数据长度。 3、利用DFT 分析连续时间函数 利用DFT 分析连续时间函数是,主要有两个处理:①抽样,②截断 对连续时间信号x a (t) 一时间T 进行抽样,截取长度为 M 则 址 ML X a (N)「-x a (t)e4dt 二「x a (nT)e jnT n=0 再进行频域抽样可得 M 4 —j 竺 n 送,T' X a (nT)e N =TX M (k) NT n =0 因此,利用DFT 分析连续时间信号的步骤如下: (1 )、确定时间间隔,抽样得到离散时间序列 x(n). (2) 、选择合适的窗函数和合适长度 M 得到M 点离散序列x M DFT 实际上是 DTFT 在单位圆上以 的抽样,数学公式表示为: N-1 _j 空 k X(k) = X(z)| 耳八 x(n)e N z” N n=0 (2 — 1) 2、利用 DFT 求DTFT 方法一:利用下列公式: 2rk X(e j )二、X(k)( ) k=0 N k= 0,1,..N - 1 (2 — 2) Sn(N ,/2) Nsin(,/2) .N A e 2为内插函数 (2— 3) (2—4) X a (r 1)|
南方GNSS连接CORS指南
南方GPS RTK 连接CORS 说明:南方gps有两个天线接口,GPRS表示网络模式天线接口(即需要用到短天线),并且需要插手机卡,UHF表示电台模式天线接口(即需要用到长天线),无需插手机卡。CORS 属于网络模式。 1.接好天线并启动仪器(仪器右边I即为开机键)与手部(左上角按键为开机键)。 2.通过蓝牙将手部与仪器连接:双击桌面下面蓝牙快捷键(或者在设置——控制面板寻找)打开蓝牙设备管理器,点击扫描设备搜索需要连接的仪器(通过机器号判别,机器号(15位账号)贴在仪器安装电池处附近)。双击对应账号出现串口服务,双击串口服务出现连接蓝牙串口服务,选择一个串口号并确定。在串口管理可以看到连接的仪器(设备名称)与对应建立的串口号(例如COM0)。若手部与仪器之前已连接过并且保存了串口则不需要自己新建串口号,记住对应的串口按OK退出。 3.双击工程之星(EGStar)打开工程之星,点击配置——端口设置,选择相应的端口号(见上一步)按确定同时退出。即手部与仪器的连接是通过串口号连接。 4.点击配置——仪器设置——主机模式设置——设置主机工作模式,下一步,选择移动站将仪器设置为移动站,确定(若已是移动站模式,则跳过此步)。点击主机模式设置——设
置主机数据链,下一步选择网络,确定。以上即将仪器设置为移动站,网络模式,不同连接方式设置不同,对应功能不同,本次只讲连接CORS。 5.点击配置——网络设置,寻找需要连接的网络点击编辑,若没有则自己增加。进入网络配置,1)名称:jxlg 2 )方式:NTRIP-VRS(若是基准站选择EAGLE) 3)连接:GPRS/CDMA 4)APN:cmnet 5)地址:218.87.13 6.148 6)端口:2101 7)用户:hao123 8)密码:hao123 9)接入点:CMR, 确定。网络设置成功后确定退出,点击连接。全部连接成功表示连接好了。 6.点参数校正:在工程之星里点击工程——新建工程,输入工程名称(一般为日期),点击椭球页面,选择目标椭球,确定退出建立新工程。 7.测量两个已知点并记下对应的点名,点击输入——坐标管理库——增加,输入已知点名称和坐标,确定退出。 8.点击工具——坐标转换——计算四参数(通过两个已知点检校即四参数检校,无法对高程检校。三个已知点即七参数检校)。点击新建,输入文件名(随便),ok退出。点击“增加”进入四参数检校,源坐标表示已知点的GPS测量坐标,可自己输入或者点击右上角方框直接调用坐标(选择对应坐 标并确定)。目标坐标表已知点的已给定坐标,可输入或调用,方法同上,输入完一个点后确定退出,增加输入下一个点,
信号与测试实验1时率与频率
基本信号分析 一、实验目的 1.掌握基本信号的时域和频域分析方法 2.掌握信号的自相关和互相关分析,了解其应用 二、数据处理与分析 (1)幅值为1,频率为100Hz的正弦信号,上图为时域图,下图为利用快速傅里叶变换获得的频谱图。从频谱图上看出,f=100Hz时频域的幅值最大。 (2)频域为100Hz,幅值为1的方波信号,上图为时域图,下图为借助快速傅立叶变换获得的频域图。从频谱图上看出,f=100Hz时频域的幅值最大,随着频域增大,频域的幅值逐渐衰减。
(3)频率为100Hz,幅值为1的锯齿波信号图,上图为时域图,下图为借助傅立叶变换而获得的频域图。从频域图看出,在100Hz的整数倍频率上,频域幅值都出现了峰值,随着频率的增大,峰值逐渐收敛至0. (4)平均振幅为1的噪声信号,上图为时域图,下图为通过快速傅立叶变
换得出的频谱图,从频谱图可以看出,白噪声信号的频谱杂乱无章,无明显规律。 (5)由频率为50Hz、100Hz、150Hz的正弦信号组成的复合信号,上图为时域图,下图为频域图,从图中可以看出,频谱图在50、100、150Hz处出现了峰值。 (6)频率为100Hz 的正弦信号叠加噪声信号:上图为时域信号图,下图为
通过快速傅立叶变换获得的频谱图。与没有叠加噪声信号的正弦波相比,时域波形出现了毛刺,而频谱图中除了在100Hz处有峰值外,在其他频率点处也出现了一些较低的峰值。 (7)频率为100Hz的正弦信号和频率为100Hz的方波信号进行叠加,上图为时域信号,下图为频谱图。从时域图上可以看出,正弦波形叠加方波后有了明显的畸变。从频谱图上可以看出,除了100Hz处出现峰值以外,在其他频率点也出现了一些峰值。
天宝GPS操作流程
一、蓝牙连接设置(基准站) 二、基准站配置 三、任务与投影参数设置 四、启动基准站 五、蓝牙连接设置(流动站) 六、流动站配置 七、启动流动站 八、工地校正 九、测量点 十、放样 十一、数据传输 十二、接收机说明 十三、电台说明 十四、常见问题 一蓝牙连接设置(基准站) 启动Trimble Survey Controller(天宝GPS接收机手簿模拟软件)测量软件 1、配置----控制器----蓝牙 连接到GPS接收机: 如果我们已经连过该接收机,就在连接到GPS接收机的下拉列表里选择。 如果下拉列表中没有该接收机的SN,那么我们点击配置,进行下一步的配置。2配置----正在等待蓝牙配置----蓝牙配置窗口 界面中:Turn on BlueTooth是打开蓝牙,必须选中此项。 Make this device discover to other devices使别的蓝牙设备能够发现本手簿,可选项。 注:接收机的SN可以在接收机的机身上查看SN桑拿或是CDKEY之类的注册码,一般就这两种意思。 3点击下面的Device(设备)选项 点击New Partnership…开始搜索新设备 如果有Trimble的GPS接收机已经开机的情况下,我们的手簿能搜索到该设备。选中该设备(框中),点击Next---- 会弹出Enter Passkey(输入密码)对话框,直接点击Next(下一步),点击Finish。蓝牙设备成功添加后就会在New Partnership…下面列出,点击OK(右上角)。4、在 (连接到GPS接收机) 的列表中,选择您的接收机型号 稍等片刻,就能看到手簿和接收机连通,在右侧的面板上显示接收机的当前信息,此时可以正常继续下一步工作。 二基准站配置 我们只需要第一次使用该手簿的时候进行该项配置,通常在正常作业过程中不需要再进行设置。 Trimble Survey Controller测量软件 1、配置----测量形式----RTK----基准站选项 测量类型:RTK,RTK(Real - time kinematic)实时动态差分法。这是一种新的常用的GPS
习题1 绘制典型信号及其频谱图(参考模板)
习题一绘制典型信号及其频谱图 电子工程学院 202班一、单边指数信号 单边指数信号的理论表达式为 对提供的MATLAB程序作了一些说明性的补充,MATLAB程序为
figure(3); plot(w,20*log10(abs(F)));xlabel('\omega');ylabel('|F(\omega)| in dB');title(' 幅频特性/dB'); figure(4); plot(w,angle(F)*57.29577951);xlabel('\omega');ylabel('\phi(\omega)/(°) ');title('相频特性'); 调整,将a分别等于1、5、10等值,观察时域波形和频域波形。由于波形 较多,现不失代表性地将a=1和a=5时的各个波形图列表如下进行对比,其 他a值的情况类似可推知。 a15 时 域 图 像
幅频特性 幅频特性/d B 相频特性
分析: 由上表中a=1和a=5的单边指数信号的波形图和频谱图的对比可以发现,当a值增大时,信号的时域波形减小得很快,而其幅频特性的尖峰变宽,相频特性的曲线趋向平缓。 二、矩形脉冲信号 矩形脉冲信号的理论表达式为 MATLAB程序为:
clear all; E=1;%矩形脉冲幅度 width=2;%对应了时域表达式中的tao t=-4:0.01:4; w=-5:0.01:5; f=E*rectpuls(t,width); %MATLAB中的矩形脉冲函数,width即是tao,t为时间 F=E*width*sinc(w.*width/2); figure(1); plot(t,f);xlabel('t');ylabel('f(t)');title('信号时域图像'); figure(2); plot(w,abs(F));xlabel('\omega');ylabel('|F(\omega)|');title('幅频特性'); figure(3); plot(w,20*log10(abs(F)));xlabel('\omega');ylabel('|F(\omega)| in dB');title(' 幅频特性/dB'); figure(4); plot(w,angle(F));xlabel('\omega');ylabel('\phi(\omega)');title('相频特性'); 调整,将分别等于1、4等值,观察时域波形和频域波形。由于波形较多,现不失代表性地将a=1和a=4时的各个波形图列表如下进行对比,其他值的情况类似可推知。 14
信号与系统实验报告-实验3--周期信号的频谱分析
信号与系统实验报告-实验3--周期信号的频谱分析
信号与系统 实验报告 实验三周期信号的频谱分析 实验三周期信号的频谱分析 实验目的: 1、掌握连续时间周期信号的傅里叶级数的物理意义和分析方法; 2、观察截短傅里叶级数而产生的“Gibbs现象”,了解其特点以及产生的原因;
3、掌握各种典型的连续时间非周期信号的频谱特征。 实验内容: (1)Q3-1 编写程序Q3_1,绘制下面的信号的波形图: 其中,0 = 0.5π,要求将一个图形窗口分割成四个子图,分别绘制cos(0t)、cos(30t)、cos(50t) 和x(t) 的波形图,给图形加title,网格线和x坐标标签,并且程序能够接受从键盘输入的和式中的项数。 程序如下: clear,%Clear all variables close all,%Close all figure windows dt = 0.00001; %Specify the step of time variable t = -2:dt:4; %Specify the interval of time w0=0.5*pi; x1=cos(w0.*t); x2=cos(3*w0.*t); x3=cos(5*w0.*t); N=input('Type in the number of the harmonic components N='); x=0; for q=1:N; x=x+(sin(q*(pi/2)).*cos(q*w0*t))/q; end subplot(221) plot(t,x1)%Plot x1 axis([-2 4 -2 2]); grid on, title('signal cos(w0.*t)') subplot(222) plot(t,x2)%Plot x2 axis([-2 4 -2 2]); grid on, title('signal cos(3*w0.*t))') subplot(223) plot(t,x3)%Plot x3
南方gnss简单操作流程
南方gnss简单操作流程 1、仪器开箱,安装三脚架,把gnss主机安装到三脚架上,整平,架设电台三脚架并整平, 架设电台天线,把电台挂到主机三脚架上,并连接好电台电源线和信号线,打开电台开关。 2、设置基站:长按住开关键和F键,等六个灯同时闪烁时松开,按F键切换到基站模式(中 间红灯),10秒后,长按F键,听到第二声响时松开,按F键切换到外接模式(右边绿灯)。 3、取出手簿,按PWR键开机,开机后进去主菜单,设置—蓝牙—点击添加新设备—点击 添加设备串号—下一步—输入密码—完成。点击屏幕上方的COM端口—新建发射端口—选择端口(如COM8)--完成--住此端口。 4、返回到主菜单,点击工程之星3.0—点击配置—端口配置—选择刚才3中配置的端口。 波特率选择115200。--点击确定。点击工程—新建工程—输入工程名称并牢记—点击确定—选择坐标系(China/BJ54/38)--点击编辑—选择中央子午线(114)和投影方式(高斯投影)--点击确定—点击确定。 5、点击配置—仪器设置—主机工作模式—主机数据链设置—下一步—外置—确定。点击 基准站设置—格式(RTCM3)--点击单点定位—点击启动基站。基站设置完毕。 6、拿出移动站主机安装到测量杆上,安装移动站天线。设置移动站:长按住开关键和F键, 等六个灯同时闪烁时松开,按F键切换到移动站模式(左边红灯),10秒后,长按F键,听到第二声响时松开,按F键切换到电台模式(左边绿灯)。 7、快速按两下手簿WIN键,切换到主菜单。设置—蓝牙—点击添加新设备—点击添加设 备串号—下一步—输入密码—完成。点击屏幕上方的COM端口—新建发射端口—选择端口(如COM7)--完成。记住此端口。 8、返回到主菜单—打开任务管理器—双击工程之星3.0进入—端口配置—选择刚才7中配 置的端口。波特率选择115200。--点击确定。--点击配置—仪器设置—主机工作模式—主机数据链—电台—确定。 9、点击移动站设置—数据差分格式(RTCM3) --确定。点击确定回到工程之星主菜单。 10、点击配置—电台设置—把电台通道换到到和主机电台的频道一致—点击切换。 11、20秒后出现浮动解或固定解,证明和基站电台连接成功。 12、(把移动站放到已知点上)点击输入—校正向导—正确输入已知点坐标和天线高 (杆高)--点击校正—精确对中—点击确定。 13、点击测量—点测量—查看屏幕上显示的坐标和输入的已知点坐标是否一致。(此时 移动站还在已知点上)如一致,则开始测量。如不一致(差1米以上),则重复校正向导工作。 14、把移动站放到需要测量的点上对中正平,点击向上的黑色箭头—点击保存--(第一 个测量点正确设置天线高度(杆高),以后的点就不用再设置天线高了。)--点击确定。 15、把移动站放到下一个测量点—对中—正平—点击保存—点击确认。 16、把移动站放到下下个测量点—对中—正平—点击保存—点击确认。……………… 17、测量完毕。关闭移动站—装箱。关闭主机及电台—装箱。 18、拿着手簿到电脑前。打开工程之星3.0.点击工程—文件导入导出—点击文件导出— 选择文件格式(南方cass格式*。Dat、pn,pc,y,x,h)--点击测量文件—选择4中所见工程的名称—点击确定。 19、点击成果文件—输入成果文件名称并牢记—点击确认。--点击导出。(提示信息中 的路径记录下来,一会连接电脑时从这个文件夹下拷贝成果文件。) 20、把手簿和usb数据线连接—把数据线和电脑连接—等连接成功后点击浏览—按到
南方gnss 一个已知点求取方法
南方RTK参数的求取及操作流程 (采用一个已知点求取参数) 当我们到一个新的测区时,首选要做的工作就是得到我们坐标转换参数,在电力及石油行业,一般都是用一个点来求取参数,当线路到达下一已知点时,重新校正新的已知点。 1、基站架设在未知点或已知点; 进入工程之星,将手薄联通移动站主机,确认一切工作正常; 2、新建工程 (输入作业名、输入坐标系、输入中央子午线、投影面高) "工程"->"新建"->输入作业名->"ok">选择坐标系->"下一步"->输入中央子午线、投影面高->"确定" 3、到一个已知点上,操作校正校导 工具->校正向导-> ①基站架设在已知点时 选择基站架设在已知点(输入当前基准站的已知点坐标、仪器高) ②基站架设在未知点时 选择基站架设在未知点 (输入当前移动站的已知点坐标、仪器高) 注: a.S82系列基站仪器高为点到主机橡胶圈的斜高 b.S86系列基站仪器高为点到测高片的斜高 c. 南方所有型号的移动站高推荐使用杆高,高度为实际杆的高度 4、输完已知坐标后,点击“校正”,将移动站气泡对中后,点击“确定” 5、检校另外的已知点,到另外的已知点上按“A”测量,对比已知点有无问题。确定正确后执行别的操作。 6、到达第二个已知点,需要校正时,重复第三步。 特别注意:此种方法只适用于在一条线路上提供了较多的已知点,或是在一个小区域作业时用到,并且距离不宜太长; 因为一个已知点是不能控制坐标系旋转的,所以在实际作业过程事先需对本地区采用单点校正后的精度先行确认。 当校正完一个后再到第二个点时,发现测量出的第二个坐标与已知坐标超出我们作业的精度要求时,需放弃使用该校正方法,采用两点或两点以上进行校正。
信号与检验测试实验一
实验一、基本信号分析 一、实验目的 1. 掌握基本信号的时域和频域分析方法 2. 掌握信号的自相关和互相关分析,了解其应用 二、实验原理 (1)信号的时域和频域转换 目的:研究分析信号的时域特征(如持续时间、幅值、周期等)和信号的频域特征(如是否含有周期性信号、信号的频率带宽等) 转换方法:时域有限长序列 频域有限长序列: 离散傅里叶变换 (2)信号相关性 相关是用来描述一个随机过程自身在不同时刻的状态间,或者两个随机过程在某个时刻状态间线性依从关系的数字特征。 自相关函数定义为: xx 01()lim ()()T T R x t x t dt T ττ→∞ =+? 互相关函数定义为: xx 0 1()lim ()()T T R x t x t dt T ττ→∞=+?
三、实验内容与步骤 (1)产生不同的周期信号,包括正弦信号、方波信号、锯齿波信号,在时域分析这些波形特征(幅值、频率(周期))。 上图为幅值为2频率为20Hz的正弦信号时域图,下图为快速傅里叶变换之后获得的频谱图。从频谱图上看出,f=20Hz时频域的幅值最大,和时域图吻合。
上图为幅值为3频率为5Hz的方波信号时域图,下图为快速傅里叶变换之后获得的频谱图。从频谱图上看出,方波信号傅里叶分解后由一个频率为5Hz 的基波和无数个高次谐波组成。以幅值衰减十倍为带宽,由图可知此方波信号带宽约为35Hz
上图为幅值为4频率为10Hz的三角波信号时域图,下图为快速傅里叶变换之后获得的频谱图。从频域图看出,在10Hz的整数倍频率上,频域幅值出现了峰值,其后有无数个谐波和基波一起组成了三角波。以幅值衰减十倍为带宽,由图可知此三角波信号带宽约为80Hz (2)在Matlab中产生随机噪声、阶跃信号(选作)、矩形脉冲(选作)
实验一 华测GNSS手持GPS的基本操作及面积测量
《3S技术》课程实验报告 学生姓名: 学号: 专业: 年级: 指导老师: 赖日文副教授 福建农林大学林学院
实验一手持GPS的基本操作及面积测量 一、实验目的 1、了解GPS的操作原理; 2、掌握手持GPS界面设置; 3、掌握手持GPS的初始化设置; 4、掌握如何采集点、线、面; 5、掌握如何利用手持GPS进行面积和线路周长的测量。 二、GPS系统的组成 GPS由三个独立的部分组成: 1、空间星座部分:21颗工作卫星,3颗备用卫星。 2、地面监控部分:1个主控站,3个注入站,5个监测站。 3、用户设备部分:即GPS接收机,接收GPS卫星发射信号,以获得必要的导航和定位信息,经数据处理,完成导航和定位工作。GPS接收机硬件一般由主机、天线和电源组成。 三、GPS定位原理 GPS的基本定位原理是:卫星不间断地发送自身的星历参数和时间信息,用户接收到这些信息后,经过计算求出接收机的三维位置,三维方向以及运动速度和时间信息。
四、实验仪器 华测LT500T亚米级手持GNSS接收机 五、实验步骤 1、按钮操作 华测LT500T亚米级手持GNSS接收机 2、主要参数 表1 华测LT500T亚米级手持GNSS接收机主要参数一览表
3、操作步骤 (1)打开MapCloud2.0软件(2)点击新建工程(或打开工程) (3)工程命名及设置 快速工程中,用户可以直接新建工程,也可以打开手簿中已存在的工程。工程列表中显示历史工程记录,选择历史记录后显示选择工程所在路径,清空记录则是清空历史工程列表中的内容。用户可选择历史记录中的工程直接打开,如不选择历史工程,直接点击确定,则跳转为打开工程界面,进入路径选择。打开工程后,进入主界面。主界面中包含了工程管理、地图显示、地图编辑操作、设置等所有操作。
09典型信号的频谱分析
实验九 典型信号的频谱分析 一. 实验目的 1. 在理论学习的基础上,通过本实验熟悉典型信号的频谱特征,并能够从信号频谱中读取 所需的信息。 2. 了解信号频谱分析的基本原理和方法,掌握用频谱分析提取测量信号特征的方法。 二. 实验原理 信号频谱分析是采用傅里叶变换将时域信号x(t)变换为频域信号X(f),从而帮助人们从另一个角度来了解信号的特征。 图1、时域分析与频域分析的关系 信号频谱X(f)代表了信号在不同频率分量成分的大小,能够提供比时域信号波形更直观,丰富的信息。时域信号x(t)的傅氏变换为: dt e t x f X ft j ?+∞ ∞--=π2)()( (1) 式中X(f)为信号的频域表示,x(t)为信号的时域表示,f 为频率。 工程上习惯将计算结果用图形方式表示, 以频率f 为横坐标,X(f)的实部)(f a 和虚部 )(f b 为纵坐标画图,称为时频-虚频谱图; 以频率f 为横坐标,X(f)的幅值)(f A 和相位 )(f ?为纵坐标画图,则称为幅值-相位谱; 以f 为横坐标,A(f) 2为纵坐标画图,则称为 功率谱,如图所示。 频谱是构成信号的各频率分量的集合,它 完整地表示了信号的频率结构,即信号由哪些 谐波组成,各谐波分量的幅值大小及初始相 位,揭示了信号的频率信息。 图2、信号的频谱表示方法
三. 实验内容 1. 白噪声信号幅值谱特性 2. 正弦波信号幅值谱特性 3. 方波信号幅值谱特性 4. 三角波信号幅值谱特性 5. 正弦波信号+白噪声信号幅值谱特性 四. 实验仪器和设备 1. 计算机1台 2. DRVI快速可重组虚拟仪器平台1套 3. 打印机1台 五. 实验步骤 1.运行DRVI主程序,点击DRVI快捷工具条上的"联机注册"图标,选择其中的“DRVI 采集仪主卡检测”或“网络在线注册”进行软件注册。 2.在DRVI软件平台的地址信息栏中输入WEB版实验指导书的地址,在实验目录中选择 “典型信号频谱分析”,建立实验环境。 图5 典型信号的频谱分析实验环境 下面是该实验的装配图和信号流图,图中的线上的数字为连接软件芯片的软件总线数据线号,6017、6018为两个被驱动的信号发生器的名字。 图6 典型信号的频谱分析实验装配图
实验一离散信号的频谱分析报告
实验一离散信号的频谱分析报告 班级 姓名 学号
实验一离散信号的频谱分析报告 1 掌握采样频率的概念 2 掌握信号频谱分析方法; 3 掌握在计算机中绘制信号频谱图的方法。 ①采样频率为1000Hz,信号频率为30Hz的正弦信号y1(n) 对其进行FFT变换 ②采样频率为1000Hz,信号频率为120Hz的正弦信号y2(n)
对其进行FFT变换 ③采样频率为1000Hz, 30Hz的正弦信号和120Hz的混合信号y3(n)。 对其进行FFT变换
语音信号波形
附录程序: fs=1000;%设定采样频率 N=1024; n=0:N-1; t=n/fs; f0=30;%设定正弦信号频率 %生成正弦信号 x=sin(2*pi*f0*t); figure(1); subplot(3,2,1); plot(t,x);%作正弦信号的时域波形xlabel('t'); ylabel('y'); title('正弦信号30HZ时域波形'); grid; %进行FFT变换并做频谱图
y=fft(x,N);%进行fft变换 mag=abs(y);%求幅值 f=(0:length(y)-1)'*fs/length(y);%进行对应的频率转换figure(1); subplot(3,2,2); plot(f,mag);%做频谱图 axis([0,100,0,500]); xlabel('频率(Hz)'); ylabel('幅值'); title('正弦信号30HZ幅频谱图N=1024'); grid; %120HZ f1=120; x=sin(2*pi*f1*t); figure(1); subplot(3,2,3); plot(t,x);%作正弦信号的时域波形 xlabel('t'); ylabel('y'); title('正弦信号120HZ时域波形'); grid; %进行FFT变换并做频谱图 y=fft(x,N);%进行fft变换 mag=abs(y);%求幅值 f=(0:length(y)-1)'*fs/length(y);%进行对应的频率转换
GNSS原理及应用
一GNSS测量原理及应用 (一)、GPS 基本原理GPS 导航系统的基本原理是测量出已知位置的卫星到用户接收机之间的距离,然后综合多颗卫星的数据就可知道接收机的具体位置。要达到这一目的,卫星的位置可以根据星载时钟所记录的时间在卫星星历中查出。而用户到卫星的距离则通过记录卫星信号传播到用户所经历的时间,再将其乘以光速得到(由于大气层电离层的干扰,这一距离并不是用户与卫星之间的真实距离,而是伪距(PR):当GPS 卫星正常工作时,会不断地用1 和0 二进制码元组成的伪随机码(简称伪码)发射导航电文。GPS 系统使用的伪码一共有两种,码。分别是民用的C/A 码和军用的PY)C/A码频率1.023MHz,重复周期一毫秒,码间距1 微秒,相当于300m;P 码频率10.23MHz,重复周期266.4 天,码间距0.1 微秒,相当于30m。而Y 码是在P 码的基础上形成的,保密性能更佳。导航电文包括卫星星历、工作状况、时钟改正、电离层时延修正、大气折射修正等信息。它是从卫星信号中解调制出来,以50b/s 调制在载频上发射的。导航电文每个主帧中包含5 个子帧每帧长6s。前三帧各10 个字码;每三十秒重复一次,每小时更新一次。后两帧共15000b。导航电文中的内容主要有遥测码、转换码、第1、2、3 数据块,其中最重要的则为星历数据。当用户接受到导航电文时,提取出卫星时间并将其与自己的时钟做对比便可得知卫星与用户的距离,再利用导航电文中的卫星星历数据推算出卫星发射电文时所处位置,用户在WGS-84 大地坐标系中的位置速度等信息便可得知。可见GPS 导航系统卫星部分的作用就是不断地发射导航电文。然而,由于用户接受机使用的时钟与卫星星载时钟不可能总是同步,所以除了用户的三维坐标x、y、z 外,还要引进一个Δt 即卫星与接收机之间的时间差作为未知数,然后用4 个方程将这4 个未知数解出来。所以如果想知道接收机所处的位置,至少要能接收到 4 个卫星的信号。GPS 接收机可接收到可用于授时的准确至纳秒级的时间信息;用于预报未来几个月内卫星所处概略位置的预报星历;用于计算定位时所需卫星坐标的广播星历,精度为几米至几十米(各个卫星不同,随时变化);以及GPS 系统信息,如卫星状况等。GPS 接收机对码的量测就可得到卫星到接收机的距离,由于含有接收机卫星钟的误差及大气传播误差,故称为伪距。对0A 码测得的伪距称为UA 码伪距,精度约为20 米左右,对P 码测得的伪距称为P 码伪距,精度约为 2 米左右。GPS接收机对收到的卫星信号,进行解码或采用其它技术,将调制在载波上的信息去掉后,就可以恢复载波。严格而言,载波相位应被称为载波拍频相位,它是收到的受多普勒频移影响的卫星信号载波相位与接收机本机振荡产生信号相位之差。一般在接收机钟确定的历元时刻量测,保持对卫星信号的跟踪,就可记录下相位的变化值,但开始观测时的接收机和卫星振荡器的相位初值是不知道的,起始历元的相位整数也是不知道的,即整周模糊度,只能在数据处理中作为参数解算。相位观测值的精度高至毫米,但前提是解出整周模糊度,因此只有在相对定位、并有一段连续观测值时才能使用相位观测值,而要达到优于米级的定位精度也只能采用相位观测值。按定位方式,GPS 定位分为单点定位和相对定位(差分定位)。单点定位就是根据一台接收机的观测数据来确定接收机位置的方式,它只能采用伪距观测量,可用于车船等的概略导航定位。相对定位(差分定位)是根据两台以上接收机的观测数据来确定观测点之间的相对位置的方法,它既可采用伪距观测量也可采用相位观测量,大地测量或工程测量均应采用相位观测值进行相对定位。在GPS 观测量中包含了卫星和接收机的钟差、大气传播延迟、多路径效应等误差,在定位计算时还要受到卫星广播星历误差的影响,在进行相对定位时大部分公共误差被抵消或削弱,因此定位精度将大大提高,双频接收机可以根据两个频率的观测量抵消大气中电离层误差的主要部分,在精度要求高,接收机间距离较远时(大气有明显差别),应选用双频接收机。 (二)、GPS 的组成部分1.空间部分GPS 的空间部分是由24 颗卫星组成(21 颗工作卫星; 3 颗备用卫星),它位于距地表20200km 的上空,均匀分布在6 个轨道面上(每个轨道面
实验:典型信号频谱分析报告
实验3.2 典型信号频谱分析 一、 实验目的 1. 在理论学习的基础上,通过本实验熟悉典型信号的波形和频谱特征,并 能够从信号频谱中读取所需的信息。 2. 了解信号频谱分析的基本方法及仪器设备。 二、 实验原理 1. 典型信号及其频谱分析的作用 正弦波、方波、三角波和白噪声信号是实际工程测试中常见的典型信号,这些信号时域、频域之间的关系很明确,并且都具有一定的特性,通过对这些典型信号的频谱进行分析,对掌握信号的特性,熟悉信号的分析方法大有益处,并且这些典型信号也可以作为实际工程信号分析时的参照资料。本次实验利用DRVI 快速可重组虚拟仪器平台可以很方便的对上述典型信号作频谱分析。 2. 频谱分析的方法及设备 信号的频谱可分为幅值谱、相位谱、功率谱、对数谱等等。对信号作频谱分析的设备主要是频谱分析仪,它把信号按数学关系作为频率的函数显示出来,其工作方式有模拟式和数字式二种。模拟式频谱分析仪以模拟滤波器为基础,从信号中选出各个频率成分的量值;数字式频谱分析仪以数字滤波器或快速傅立叶变换为基础,实现信号的时—频关系转换分析。 傅立叶变换是信号频谱分析中常用的一个工具,它把一些复杂的信号分解为无穷多个相互之间具有一定关系的正弦信号之和,并通过对各个正弦信号的研究来了解复杂信号的频率成分和幅值。 信号频谱分析是采用傅立叶变换将时域信号x(t)变换为频域信号X(f),从而帮助人们从另一个角度来了解信号的特征。时域信号x(t)的傅氏变换为: 式中X(f)为信号的频域表示,x(t)为信号的时域表示,f 为频率。 3. 周期信号的频谱分析 周期信号是经过一定时间可以重复出现的信号,满足条件: dt e t x f X ft j ?+∞ ∞--=π2)()(
天宇G1-GNSS使用流程
天宇G1使用流程 一,连接仪器 1,架设基站时注意多用途电缆连接主机和电台时要红点对红点,最后连接电瓶,红正黑负。最后收工的时候关掉主机和电台,先拔电源。注 意插拔顺序。 2,打开X3手簿,点击菜单打开工程之星3.0.-配置-蓝牙管理器-搜索-点击基站编号-连接。连接成功后-配置-仪器设置,设置主机工作模式为 基站,数据链为外置,修改差分格式为CMRX启动基站,到此基准站设 置成功,退出。在此进入蓝牙管理器,断开-点击移动站编号-连接。进 入配置-仪器设置,设置主机工作模式为移动站,数据链为电台,进入电 台设置,选择与基站电台一致的通道号,点切换,至此可得到固定解状 态。 注:以上工作需要在第一次拿到设备的时候需要一步步设置,以后使用 都会自动连接,无需重新设置。 二,建立坐标系及求转换参数 1,新建工程-输入工程名点确定。配置-坐标系统设置-增加-输入参数系统名(最好和工程名一致),选择和已知点对应的椭球名称和中央子午线 -确定 2,求转换参数,先进入测量-点测量,采集已知点原始坐标,注意在固定解状态下,气泡居中在采集。采集完后取消进入输入-求转换参数-增 加,输入第一个点的已知坐标高程-从坐标管理库选点,选择对应第一个 点的原始坐标点确定-确认,再增加第二个点(过程和第一个点一致), 有第三第四个过程同上,输完后点保存,应用。 3,校正向导,即单点校正:输入-校正向导-基准站架设在未知点上,下一步-输入当前已知点的已知坐标高程,天线高,点校正,待气泡居中后 按回车或者屏幕上点确定即可。 三,采点和放样 1,采点-测量-点测量-按A或者ENTER采集,修改点名,注意天线高,保存即可。 2,放样-测量-点放样-点击向上箭头选目标,输入要放样的已知坐标高程,选中对应的点放样-根据提示找到对应的点即可。 四,数据导出 工程-数据导入导出-数据导出-测量文件选择该工程下的数据文件-成果文件-编辑一个和原始数据文件不同名的文件名-导出,提示导出成功。 把X3手簿和电脑用数据线连接,或者把U盘插入手簿,把成果文件复制出来即可。成果文件路径;资源管理器-SD卡-EGJOBS-对应的工程文件名-data
实验1 信号的频谱图
大连理工大学实验报告 学院(系): 专业: 班级: _________ 姓 名: 学号: 组: ___ __________ 实验时间: 实验室: 实验台:_____________ 指导教师签字: 成绩:__________________ 实验名称 一、 实验目的和要求 1. 掌握周期信号的傅里叶级数展开; 2. 掌握周期信号的有限项傅里叶级数逼近; 3. 掌握周期信号的频谱分析; 4. 掌握连续非周期信号的傅立叶变换; 5. 掌握傅立叶变换的性质。 二、实验程序和结果 1. 已知周期三角信号如下图1-5所示,试求出该信号的傅里叶级数,利用MATLAB 编程实现其各次谐波的叠加,并验证其收敛性。 三角型号的傅里叶级数展开式如下: ) 5cos 1 3cos 1 (cos 4 2 1 )(5 3 2 2 2 ++ + += wt wt wt t f pi
clc clear t=-5:0.001:5; y=0.5*(sawtooth(pi*(t+1),0.5)+1); plot(t,y); xlabel('t'),ylabel('周期三角波') axis([-3 3 -0.5 1.5]); grid on n_max=[1 3 5 11 47]; N=length(n_max); for k=1:N n=1:2:n_max(k); b=4./(pi*pi*n.*n); x=0.5+b*cos(pi*n'*t); figure; plot(t,y,'b'); hold on; plot(t,x,'r'); hold off; xlabel('t'),ylabel(‘部分和波形'); axis([-3 3 -0.5 1.5]);grid on; title(['最高谐波次数=',num2str(n_max(k))]); end t 部分和波形 最高谐波次数 =1 t 周期三角信号
习题1绘制典型信号及其频谱图
习题一 绘制典型信号及其频谱图 电子工程学院202班 单边指数信号的理论表达式为 figure(4); 调整,将a 分别等于1、5、10等值,观察时域波形和频域波形。由于波形 较多,现不失代表性地将a=1和a=5时的各个波形图列表如下进行对比, 其 他a 值的情况类似可推知。 单边指数信号 信号 名称 单边 时间函数f t 频谱函数F ■ 指数 脉冲 Ee% t a 对提供的MATLAB 程序作了一些说明性的补充, MATLAB 程序为 %单边指数信号 clc; close all ; clear all ; E=1; a=1; %调整a 的值,观察不同a 的值对信号波形和频谱的影响 t=0:0.01:4; w=-30:0.01:30; f=E*exp(-a*t); F=1./(a+j*w); figure(1); plot(t,f);xlabel( 't' );ylabel( 'f(t)' );title( '信号时域图像’); figure(2); plot(w,abs(F));xlabel( '\omega' 特性'); figure (3); plot(w,20*log10(abs(F)));xlabel( );ylabel( '|F(\omega)|' ); ti tle( '幅频 '\omega' );ylabel( '|F(\omega)| in dB' );title( 幅频特性/dB'); plot(w,a ngle(F)*57.29577951);xlabel( )/ (°)' );title( '相频特性’); '\omega' );ylabel( '\phi(\omega
GNSS培训课件
GNSS培训课件 主要内容 主要内容 1. 什么是 GNSS ?GNSS 现状 3.RTK 简易原理 4.国内外知名制造商 GNSS的全称是全球导航卫星系统(Global Navigation Satellite System),它是泛指 所有的卫星导航系统,包括全球的、区域的和 增强的,如美国的GPS、俄罗斯的Glonass、欧 洲的Galileo、中国的北斗卫星导航系统,以 及相关的增强系统,如美国的WAAS(广域增强 系统)、欧洲的EGNOS(欧洲静地导航重叠系 统)和日本的MSAS(多功能运输卫星增强系统) 等,还涵盖在建和以后要建设的其他卫星导航 系统。国际GNSS系统是个多系统、多层面、多 模式的复杂组合系统,如下图所示。GPS GPS是英文Global Positioning System(全 球定位系统)的简称。GPS起始于1958年美国 军方的一个项目,1964年投入使用。20世纪70 年代,美国陆海空三军联合研制了新一代卫星
定位系统GPS 。主要目的是为陆海空三大领域 提供实时、全天候和全球性的导航服务,并用 于情报收集、核爆监测和应急通讯等一些军事 目的,经过20余年的研究实验,耗资300亿美 元,到1994年,全球覆盖率高达98%的24颗 GPS卫星星座己布设完成。GLONASS格洛纳斯GLONASS是俄文GLObalnaya NAvigatsionnaya Sputnikovaya Sistema的头文字。 其实, 格洛纳斯的正式组网比GPS还早, 这也是 美国加快GPS建设的重要原因之一。不过苏联的解 体让格洛纳斯受到很大影响,正常运行卫星数量大 减,甚至无法为为俄罗斯本土提供全面导航服务, 更不要说和GPS竞争。到了21世纪初随着俄罗斯经 济的好转,格洛纳斯也开始恢复元气,推出了格洛 纳斯-M和更现代化的格洛纳斯-K卫星更新星座。已经于2011年1月1日在全球正式运行。根据俄罗斯 联邦太空署信息中心提供的数据(2012年10月10 日),目前有24颗卫星正常工作、3颗维修中、3颗 备用、1颗测试中。Galileo 伽利略卫星导航系统(Galileo satellite navigation system), 是由欧盟研制和建立的全球卫星导航定位系统,该计划于1999 年2月由欧洲委员会公布,欧洲委员会和欧空局共同负责。系统 由轨道高度为23616km的30颗卫星组成,其中27颗工作星,3颗
实验一 采样率对信号频谱的影响
实验一 采样率对信号频谱的影响 1.实验目的 (1)理解采样定理; (2)掌握采样频率确定方法; (3)理解频谱的概念; (4)理解三种频率之间的关系。 2.实验原理 理想采样过程是连续信号x a (t )与冲激函数串M (t )的乘积的过程 ∑∞ -∞ =-= k s kT t t M )()(δ (7-13) )()()(?t M t x t x a a = (7-14) 式中T s 为采样间隔。因此,理想采样过程可以看作是脉冲调制过程,调制信号是连续信号x a (t ),载波信号是冲激函数串M (t )。显然 )()()()()(?s k s a k s a a kT t kT x kT t t x t x -= -=∑∑∞ -∞ =∞ -∞ =δδ (7-15) 所以,)(?t x a 实际上是x a (t )在离散时间kT s 上的取值的集合,即)(?s a kT x 。 对信号采样我们最关心的问题是,信号经过采样后是否会丢失信息,或者说能否不失真 地恢复原来的模拟信号。下面从频域出发,根据理想采样信号的频谱)(?Ωj X a 和原来模拟信号的频谱)(Ωj X 之间的关系,来讨论采样不失真的条件 ∑ ∞ -∞ =Ω-Ω=Ωk s s a kj j X T j X )(1)(? (7-16) 上式表明,一个连续信号经过理想采样后,其频谱将以采样频率Ωs =2π/T s 为间隔周期延拓,其频谱的幅度与原模拟信号频谱的幅度相差一个常数因子1/T s 。只要各延拓分量与原频谱分量之间不发生频率上的交叠,则可以完全恢复原来的模拟信号。根据式(7-16)可知,要保证各延拓分量与原频谱分量之间不发生频率上的交叠,则必须满足Ωs ≥2Ω。这就是奈奎斯特采样定理:要想连续信号采样后能够不失真地还原原信号,采样频率必须大于或等于被采样信号最高频率的两倍 h s Ω≥Ω2,或者h s f f 2≥,或者2 h s T T ≤ (7-17) 即对于最高频率的信号一个周期内至少要采样两点,式中Ωh 、f s 、T h 分别为被采样模拟信号的最高角频率、频率和最小周期。 在对正弦信号采样时,采样频率要大于这一最低的采样频率,或小于这一最大的采样间