DS3882E+C;DS3882E+T&RC;DS3882E+;DS3882E+T&R;中文规格书,Datasheet资料
General Description
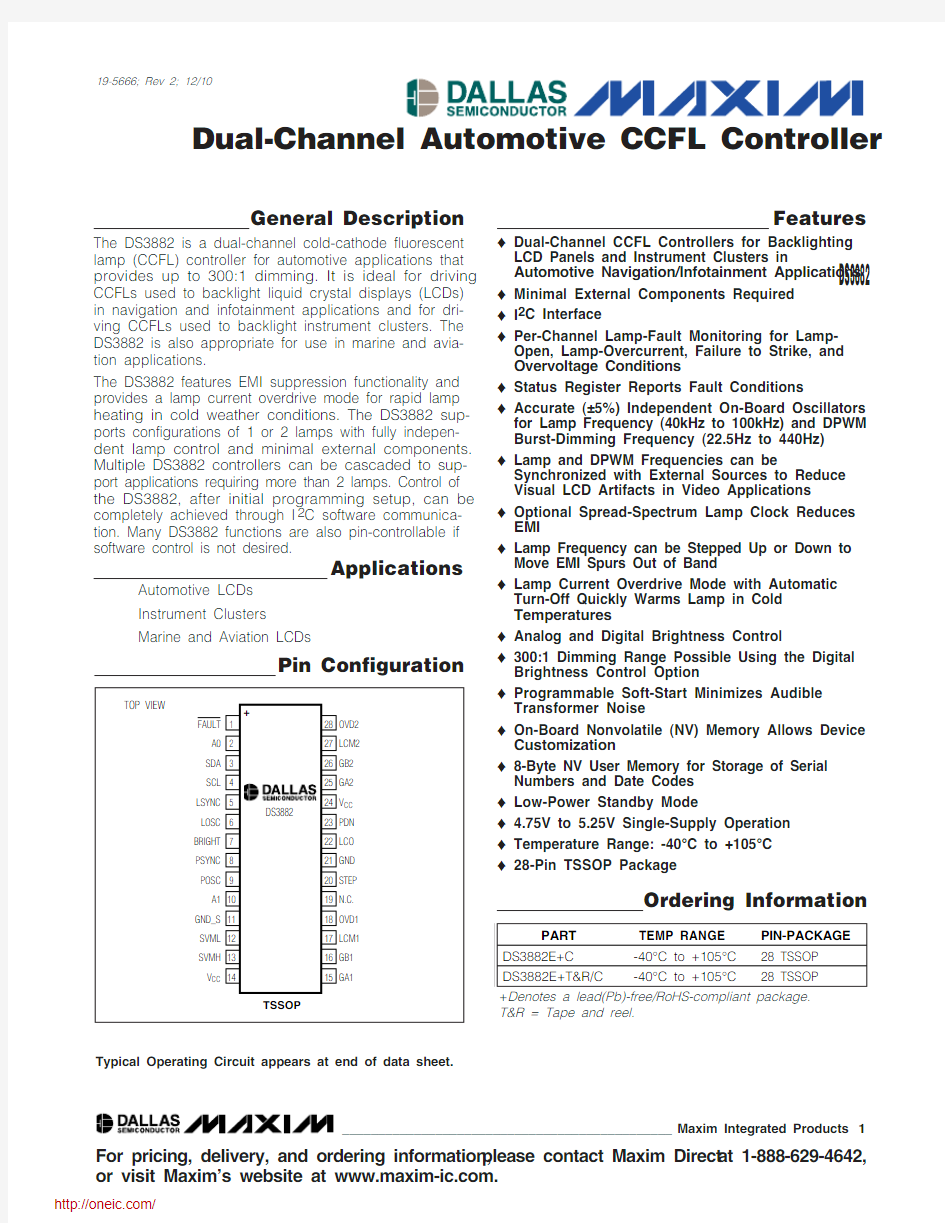
The DS3882 is a dual-channel cold-cathode fluorescent lamp (CCFL) controller for automotive applications that provides up to 300:1 dimming. It is ideal for driving CCFLs used to backlight liquid crystal displays (LCDs)in navigation and infotainment applications and for dri-ving CCFLs used to backlight instrument clusters. The DS3882 is also appropriate for use in marine and avia-tion applications.
The DS3882 features EMI suppression functionality and provides a lamp current overdrive mode for rapid lamp heating in cold weather conditions. The DS3882 sup-ports configurations of 1 or 2 lamps with fully indepen-dent lamp control and minimal external components.Multiple DS3882 controllers can be cascaded to sup-port applications requiring more than 2 lamps. Control of the DS3882, after initial programming setup, can be completely achieved through I 2C software communica-tion. Many DS3882 functions are also pin-controllable if software control is not desired.
Applications
Automotive LCDs Instrument Clusters Marine and Aviation LCDs
Features
?Dual-Channel CCFL Controllers for Backlighting LCD Panels and Instrument Clusters in
Automotive Navigation/Infotainment Applications ?Minimal External Components Required ?I 2C Interface
?Per-Channel Lamp-Fault Monitoring for Lamp-Open, Lamp-Overcurrent, Failure to Strike, and Overvoltage Conditions
?Status Register Reports Fault Conditions
?Accurate (±5%) Independent On-Board Oscillators for Lamp Frequency (40kHz to 100kHz) and DPWM Burst-Dimming Frequency (22.5Hz to 440Hz)?Lamp and DPWM Frequencies can be
Synchronized with External Sources to Reduce Visual LCD Artifacts in Video Applications
?Optional Spread-Spectrum Lamp Clock Reduces EMI
?Lamp Frequency can be Stepped Up or Down to Move EMI Spurs Out of Band
?Lamp Current Overdrive Mode with Automatic Turn-Off Quickly Warms Lamp in Cold Temperatures
?Analog and Digital Brightness Control
?300:1 Dimming Range Possible Using the Digital Brightness Control Option
?Programmable Soft-Start Minimizes Audible Transformer Noise
?On-Board Nonvolatile (NV) Memory Allows Device Customization
?8-Byte NV User Memory for Storage of Serial Numbers and Date Codes ?Low-Power Standby Mode
?4.75V to 5.25V Single-Supply Operation ?Temperature Range: -40°C to +105°C ?28-Pin TSSOP Package
DS3882
Dual-Channel Automotive CCFL Controller
______________________________________________Maxim Integrated Products 1
Pin Configuration
19-5666; Rev 2; 12/10
For pricing, delivery, and ordering information,please contact Maxim Direct at 1-888-629-4642,or visit Maxim’s website at https://www.360docs.net/doc/9616427879.html,.
+Denotes a lead(Pb)-free/RoHS-compliant package.T&R = Tape and reel.
Ordering Information
Typical Operating Circuit appears at end of data sheet.
D S 3882
Dual-Channel Automotive CCFL Controller
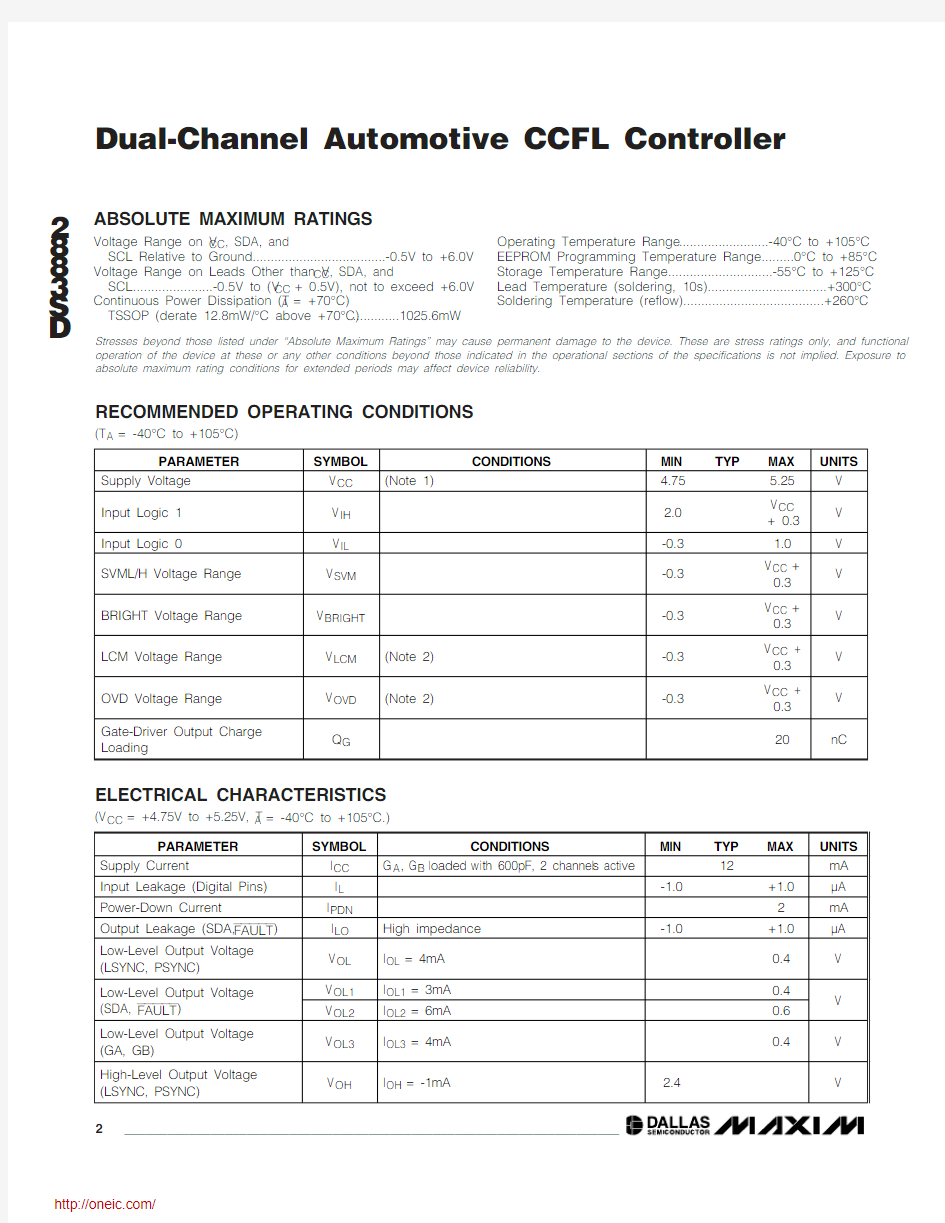
ABSOLUTE MAXIMUM RATINGS
RECOMMENDED OPERATING CONDITIONS
Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to absolute maximum rating conditions for extended periods may affect device reliability.
Voltage Range on V CC , SDA, and
SCL Relative to Ground.....................................-0.5V to +6.0V Voltage Range on Leads Other than V CC , SDA, and
SCL......................-0.5V to (V CC + 0.5V), not to exceed +6.0V Continuous Power Dissipation (T A = +70°C)
TSSOP (derate 12.8mW/°C above +70°C).............1025.6mW
Operating Temperature Range .........................-40°C to +105°C EEPROM Programming Temperature Range.........0°C to +85°C Storage Temperature Range.............................-55°C to +125°C Lead Temperature (soldering, 10s).................................+300°C Soldering Temperature (reflow).......................................+260°C
ELECTRICAL CHARACTERISTICS
DS3882
Dual-Channel Automotive CCFL Controller
_____________________________________________________________________3
ELECTRICAL CHARACTERISTICS (continued)
D S 3882
Dual-Channel Automotive CCFL Controller 4_____________________________________________________________________
Note 2:During fault conditions, the AC-coupled feedback values are allowed to be below the absolute max rating of the LCM or
OVD pin for up to 1 second.
Note 3:Voltage with respect to V DCB .
Note 4:Lamp overdrive and analog dimming (based on reduction of lamp current) are disabled.
Note 5:This is the minimum pulse width guaranteed to generate an output burst, which generates the DS3882’s minimum burst
duty cycle. This duty cycle may be greater than the duty cycle of the PSYNC input. Once the duty cycle of the PSYNC input is greater than the DS3882’s minimum duty cycle, the output’s duty cycle tracks the PSYNC’s duty cycle. Leaving PSYNC low (0% duty cycle) disables the GAn and GBn outputs in DPWM receiver mode.
Note 6:This is the maximum lamp frequency duty cycle that is generated at any of the GAn or GBn outputs with spread-spectrum
modulation disabled.
Note 7:I 2C interface timing shown is for fast-mode (400kHz) operation. This device is also backward compatible with I 2C stan-dard-mode timing.
Note 8:After this period, the first clock pulse can be generated.
Note 9:C B —total capacitance allowed on one bus line in picofarads.
Note 10:EEPROM write time applies to all the EEPROM memory. EEPROM write begins after a stop condition occurs.Note 11:Guaranteed by design.
I 2C AC ELECTRICAL CHARACTERISTICS (See Figure 9)
NONVOLATILE MEMORY CHARACTERISTICS
DS3882
Dual-Channel Automotive CCFL Controller
_____________________________________________________________________5
ACTIVE SUPPLY CURRENT vs. SUPPLY VOLTAGE
SUPPLY VOLTAGE (V)
S U P P L Y C U R R E N T (m A )
5.205.154.804.854.90 5.005.054.95 5.104.55.05.5
6.06.5
7.07.5
8.04.0
4.75
5.25
ACTIVE SUPPLY CURRENT vs. TEMPERATURE
TEMPERATURE (°C)
S U P P L Y C U R R E N T (m A )
32.55.75.9
6.16.36.56.76.9
7.17.37.55.5
-40.0
105
INTERNAL FREQUENCY CHANGE
vs. TEMPERATURE
TEMPERATURE (
°C)
F R E Q U E N C Y C H A N
G E (%)
32.5-0.8-0.6-0.4-0.200.2
0.40.60.81.0
-1.0-40.0
105
TYPICAL OPERATION AT 11V
D S 3882 t o c
04
10μs 5.0V G A 10μs 5.0V G B 10μs 2.00V LCM 10μs 2.00V OVD
TYPICAL OPERATION AT 13V
10μs 5.0V G A 10μs 5.0V G B 10μs 2.00V LCM
10μs 2.00V OVD
TYPICAL OPERATION AT 16V
10μs 5.0V G A 10μs 5.0V G B 10μs 2.00V LCM 10μs 2.00V OVD
TYPICAL STARTUP WITH SVM
D S 3882 t o c 07
2ms 5.0V SVML 2ms 5.0V G B 2ms 2.00V LCM 2ms 2.00V OVD
BURST DIMMING AT 150Hz AND 10%
1ms 5.0V G A 1ms 5.0V G B 1ms 2.00V LCM 1ms 2.00V OVD
BURST DIMMING AT 150Hz AND 50%
1ms 5.0V G A 1ms 5.0V G B 1ms 2.00V LCM 1ms 2.00V OVD
Typical Operating Characteristics
(V CC = 5.0V, T A = +25°C, unless otherwise noted.)
D S 3882
Dual-Channel Automotive CCFL Controller 6_____________________________________________________________________
Typical Operating Characteristics (continued)
(V CC = 5.0V, T A = +25°C, unless otherwise noted.)
SOFT-START AT V INV = 16V
D S 3882 t o c 10
50μs 5.0V G A 50μs 5.0V G B 50μs 2.00V LCM 50μs 2.00V OVD
LAMP STRIKE—EXPANDED VIEW
1ms 5.0V G A 1ms 5.0V G B 1ms 2.00V LCM 1ms 2.00V OVD
AUTO RETRY DISABLED
D S 3882 t o c 12
0.5s 5.0V G A 0.5s 5.0V G B 0.5s 2.00V LCM 0.5s 2.00 OVD
STAGGERED BURST DIMMING START
0.2ms 2.00V GA10.2ms 2.00V GA2
AUTORETRY DISABLED
0.1s 5.0V G A 0.1s 5.0V G B
0.1s 2.00V LCM 0.1s 2.00V OVD
LAMP OPENED
Dual-Channel Automotive CCFL Controller
DS3882 Array
_____________________________________________________________________7
D S 3882
Dual-Channel Automotive CCFL Controller 8_____________________________________________________________________
DS3882
Dual-Channel Automotive CCFL Controller
_____________________________________________________________________9
Functional Diagrams
Figure 1. Functional Diagram
Detailed Description
The DS3882 uses a push-pull drive scheme to convert a DC voltage (8V to 16V) to the high-voltage (300V RMS to 1000V RMS ) AC waveform that is required to power the CCFLs. The push-pull drive scheme uses a minimal number of external components, which reduces assem-bly cost and makes the printed circuit board design easy to implement. The push-pull drive scheme also provides an efficient DC-to-AC conversion and pro-duces near-sinusoidal waveforms.
Each DS3882 channel drives two logic-level n-channel MOSFETs that are connected between the ends of a step-up transformer and ground (see the Typical Operating Circuit ). The transformer has a center tap on the primary side that is connected to a DC voltage sup-ply. The DS3882 alternately turns on the two MOSFETs to create the high-voltage AC waveform on the sec-ondary side. By varying the duration of the MOSFET turn-on times, the CCFL current is able to be accurately controlled.
A resistor in series with the CCFL’s ground connection enables current monitoring. The voltage across this resistor is fed to the lamp current monitor (LCM) input and compared to an internal reference voltage to deter-mine the duty cycle for the MOSFET gates. Each CCFL receives independent current monitoring and control,which maximizes the lamp’s brightness and lifetime.Block diagrams of the DS3882 are shown in Figures 1and 2. More operating details of the DS3882 are dis-cussed on the following pages of this data sheet.
Memory Registers and
I 2C-Compatible Serial Interface
The DS3882 uses an I 2C-compatible serial interface for communication with the on-board EEPROM and SRAM configuration/status registers as well as user memory.The configuration registers, which are a mixture of shadowed EEPROM and SRAM, allow the user to cus-tomize many DS3882 parameters such as the soft-start ramp rate, the lamp and dimming frequency sources,brightness of the lamps, fault-monitoring options, chan-nel enabling/disabling, EMI control, and lamp current overdrive control. The eight bytes of NV user memory can be used to store manufacturing data such as date codes, serial numbers, or product identification num-bers. The device is shipped from the factory with the configuration registers programmed to a set of default configuration parameters. To inquire about custom pro-gramming, contact the factory.
D S 3882
Dual-Channel Automotive CCFL Controller 10
____________________________________________________________________
Figure 2. Per Channel Logic Diagram
Functional Diagrams (continued)
分销商库存信息:
MAXIM
DS3882E+C DS3882E+T&R/C DS3882E+ DS3882E+T&R
步进驱动系统的常见问题分析
步进驱动系统的常见问题分析 1、什么是步进电机?在何种情况下该使用步进电机? 步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。 您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达调速的目的。因此在需要准确定位或调速控制时均可考虑使用步进电机。 2、步进电机分哪几种?有什么区别? 步进电机分三种:永磁式(PM),反应式(VR)和混合式(HB) 永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度; 反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。在欧美等发达国家80年代已被淘汰。 混合式步进是指混合了永磁式和反应式的优点。它又分为两相四相和五相:两相步进角一般为1.8度而五相步进角一般为0.72度。这种步进电机的应用最为广泛。
3、什么是保持转矩(HOLDING TORQUE)? 保持转矩(HOLDINGTORQUE)是指步进电机通电但没有转动时,定子锁住转子的力矩。它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。保持转矩越大则电机带负载能力越强。由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机重要的参数之一。比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m的步进电机。 4、步进电机的驱动方式有几种? 一般来说,步进电机有恒压,恒流驱动两种,恒压驱动已近淘汰,目前普遍使用恒流驱动。 5、步进电机精度为多少?是否累积? 一般步进电机的精度为步进角的3-5%。步进电机单步的偏差并不会影响到下一步的精度因此步进电机精度不累积。 6、步进电机的外表温度允许达到多少? 步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降甚至于丢失。因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来说,磁性材料的退磁点都在摄氏130度以上,因此步进电机外表温度在摄氏80-90度完全正常。 7、为什么步进电机的力矩会随转速升高而下降? 当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。 8、为什么步进电机低速时可以正常运转,但若高于一定速度就无法启动,并伴有啸叫声? 步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。在有负载的情况下,启动频率应更低。如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。我们建议空载启动频率选定为电机运转一圈所需脉冲数的2倍。 9、如何克服两相混合式步进电机在低速运转时的振动和噪声? 步进电机低速转动时振动和噪声大是其固有的缺点,一般可采用以下方案来克服: A、如步进电机正好工作在共振区,可通过改变减速比提高步进电机运行速度。 B、采用带有细分功能的驱动器,这是最常用的,最简便的方法。因为细分型驱动器电机的相电流变流较半步型平缓。
单片机驱动步进电机程序代码
单片机驱动步进电机程 序代码 Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998
/******************************************************** 实现功能:正转程序 使用芯片:AT89S52 晶振: 编译环境:Keil 作者: 【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!********************************************************/ #include<> //库文件 #define uchar unsigned char //字符型宏定义 #define uint unsigned int //整型宏定义 uchar tcnt; //定时器计数初值定义 uint sec; //速度值定义 uchar buf[11]; uchar bai,shi,ge; /********************控制位定义*************************/ sbit shi_neng=P1^0; // 使能控制位 sbit fang_shi=P1^1; // 工作方式控制位 sbit fang_xiang=P1^2;// 旋转方向控制位 sbit mai_chong=P1^3; // 脉冲控制位 /********************延时函数***************************/ void delay1ms(uchar z) { uchar x,y; for(x=0;x 水准仪测量高程的方法和步骤 内容:理解水准测量的基本原理;掌握DS3 型微倾式水准仪、自动安平水准仪的构造特点、水准尺和尺垫;掌握水准仪的使用及检校方法;掌握水准测量的外业实施(观测、记录和检核)及内业数据处理(高差闭合差的调整)方法;了解水准测量的注意事项、精密水准仪和电子水准仪的构造及操作方法。 重点:水准测量原理;水准测量的外业实施及内业数据处理。 难点:水准仪的检验与校正。 §2.1 高程测量(Height Measurement )的概念 测量地面上各点高程的工作, 称为高程测量。高程测量根据所使用的仪器和施测方法的不同,分为: (1)水准测量(leveling) (2)三角高程测量(trigonometric leveling) (3)气压高程测量(air pressure leveling) (4)GPS 测量(GPS leveling) §2.2 水准测量原理 一、基本原理 水准测量的原理是利用水准仪提供的“水平视线”,测量两点间高差,从而由已知点高程推算出未知点高程。 a ——后视读数A ——后视点 b ——前视读数B ——前视点 1、A、B两点间高差: 2、测得两点间高差后,若已知A 点高程,则可得B点的高程:。 3、视线高程: 4、转点TP(turning point) 的概念:当地面上两点的距离较远,或两点的高差太大,放置一次仪器不能测定其高差时,就需增设若干个临时传递高程的立尺点,称为转点。 二、连续水准测量 如图所示,在实际水准测量中,A 、B 两点间高差较大或相距较远,安置一次水准仪不能测定两点之间的高差。此时有必要沿A 、B 的水准路线增设若干个必要的临时立尺点,即转点(用作传递高程)。根据水准测量的原理依次连续地在两个立尺中间安置水准仪来测定相邻各点间高差,求和得到A 、B 两点间的高差值,有: h 1 = a 1 -b 1 h 2 = a 2 -b 2 …… 则:h AB = h 1 + h 2 +…… + h n = Σ h = Σ a -Σ b 结论:A 、B 两点间的高差等于后视读数之和减去前视读数之和。 § 2.3 水准仪和水准尺 一、水准仪(level) 如图所示,由望远镜、水准器和基座三部分组成。 步进电机及其驱动系统简介中英文翻译Step characteristics for machine for angular displacement for entering the electrical engineering is first kind will give or get an electric shocking the pulse signal conversion cowgirl or line potential moving battery carry outing a piece, having the fast stopping, accurate step entering and directly accepting the arithmetic figure measuring, because of but got the extensive application.Such as in the drafting machine, print the machine and optical instrument inside, and all adopt the inside of a place control system for entering the electrical engineering to positioning to paint the pen print head or optical prinipal, especially indrstry process the type control, and move to spread to feel the to can immediately attain the precision fixed position because of its precision and need not potential, and control the technique along with the calculator of continuously deveolp, applied to would be more and more extensive. Control and can is divided into the simple control sum the complicacy to control to motor two kind.The simple control points to proceeds to start to motor, the system move, positive and negative revolution and sequential https://www.360docs.net/doc/9616427879.html,plicacy the control point to the motor's revolving speed, screw angle, turning moment, tension, electric current etc. physics quantisty progress control.Control technique that the 两相混合式步进电机驱动器使用说明 一、简介 THB7128是一款专业的两相步进电机驱动芯片。它内部集成了细分、电流 调节、CMOS功率放大等电路,配合简单的外围电路即可实现高性能、多 细分、大电流的驱动电路。适合驱动42、57型两相、四相混合式步进电机。在低成本、低振动、小噪声、高速度的设计中应用效果较佳。 二、特色 1、采用的是7128单芯片两相正弦细分步进电机驱动 2、直接采用单脉冲和方向信号译码控制模式 3、双全桥MOSFET驱动,低导通电阻Ron=0.53Ω 4、可实现正反转控制 5、通过3位选择8档细分控制(1,1/2,1/4,1/8,1/16,1/32,1/64,1/128) 6、最高耐压40VDC 7、高输出电流(Iout=3A),输出电流方便可调 8、芯片内部有过热保护(TSD)和过流检测电路 9、采用底部大散热片,散热快 10、采用高速光耦,使得性能更稳定,速度更快 三、电气性能 输入电源12-32VDC 输出电流最大3A(可调电阻方便可调) 细分选择 1细分,1/2细分,1/4细分,1/8细分,16细分,1/32细分,1/64 细分,1/128细分(可由拨码开关M1、M2、M3设定) 四、使用指南 1、关于电源: ①VCC连接直流电源正(注意:10V<VCC<32V)。 ②如果超出范围,可能造成驱动器无法正常工作,甚至是损坏。 ③为保证驱动器的正常工作,请选用优质的电源,推荐32VDC功率在100W 以上的电源。 ④对于电压的接入误操作造成的驱动器损坏,不在免费保修范围内。 2、关于电流输出: 电流调节使用可调电阻,根据不同档位对应不同大小的电流。(顺时针调减小,逆时针增大)如图1: 图1 3、、关于细分 细分数是以驱动板上的拨盘开关选择设定的,根据细分选择表的数据设定(最好在断电情况下设定)。细分后步进电机步距角按下列方法计算:步距角= 水准仪的使用方法及注意事项 水准仪广泛用于建筑行业,是测量水平高低的仪器,具有精度高、使用方便、快速、可靠等优点,使用在引测、大面积场地测量、楼面水平线标志、沉降观测等。现介绍水准仪的使用方法。 一、水准仪器组合: 1.望远镜 2.调整手轮 3.圆水准器 4.微调手轮 5.水平制动手轮 6.管水准器 7.水平微调手轮 8.脚架 二、操作要点: 在未知两点间,摆开三脚架,从仪器箱取出水准仪安放在三脚架上,利用三个机座螺丝调平,使圆气泡居中,跟着调平管水准器。水平制动手轮是调平的,在水平镜内通过三角棱镜反射,水平重合,就是平水。将望远镜对准未知点(1)上的塔尺,再次调平管水平器重合,读出塔尺的读数(后视),把望远镜旋转到未知点(2)的塔尺,调整管水平器,读出塔尺的读数(前视),记到记录本上。 计算公式:两点高差=后视-前视。 三、校正方法: 将仪器摆在两固定点中间,标出两点的水平线,称为a、b线,移动仪器到固定点一端,标出两点的水平线,称为a’、b ’。计算如果a-b≠a’-b ’时,将望远镜横丝对准偏差一半的数值。用校针将水准仪的上下螺钉调整,使管水平泡吻合为止。重复以上做法,直到相等为止。 四、保养与维修 1.水准仪是精密的光学仪器,正确合理使用和保管对仪器精度和寿命有很大的作用; 2.避免阳光直晒,不许可证随便拆卸仪器; 3.每个微调都应轻轻转动,不要用力过大。镜片、光学片不准用手触片; 4.仪器有故障,由熟悉仪器结构者或修理部修理; 5.每次使用完后,应对仪器擦干净,保持干燥。 S3水准仪的结构和使用方法 (一) 水准测量仪器 水准测量用的仪器、工具:水准仪、水准尺和尺垫。 1. 水准尺和尺垫 水准尺是水准测量中用于高差量度的标尺,水准尺制造用材有优质木材、合金材和玻璃钢等几种,有2 m,3 m,5 m等多种长度和整尺、折尺、塔尺等多种类型。水准尺按精度高低可分为精密水准尺和普通水准尺。 (1) 普通水准尺 材料:用木料、铝材和玻璃钢制成。 结构:尺长多为3 m,两根为一副,且为双面(黑、红面)刻划的直尺,每隔1 cm印刷有黑白或红白相间的分划。每分米处注有数字,对一对水准尺而言,黑、红面注记的零点不同。黑面尺的尺底端从零开始注记读数,两尺的红面尺底端分别从常数4687 mm和4787 mm开始,称为尺常数K。即K1=4.687 m,K2=4.787 m。设尺常数是为了检核用。 (2)精密水准尺 材料:框架用木料制成,分划部分用镍铁合金做成带状。 结构:尺长多为3 m,两根为一副。在尺带上有左右两排线状分划,分别称为基本分划和辅助分划,格值1 cm。这种水准尺配合精密水准仪使用。 (3)尺垫(尺台) 水准测量中有许多地方需要设置转点(中间点),为防止观测过程中尺子下沉而影响读数的准确性,应在转点处放一尺垫。尺垫一般由平面为三角形的铸铁制成,下面有三个尖脚,便于踩入土中,使之稳定。上面有一突起的半球形小包,立水准尺于球顶,尺底部仅接触球顶最高的一点,当水准尺转动方向时,尺底的 步进电机 学习交流群——126500542(验证信息:千寻琥珀心) 在这里介绍一下如何用51单片机驱动步进电机。 本例所使用的步进电机为四项驱动,驱动电压为12V,锯齿角(为什么叫锯齿叫而不叫步进角,我也不知道这样解释是否正确,但是根据步进角计算公式所得的结果将7.5理解为锯齿叫会更好些,也在网上搜了不少资料,说是步进角的较多,但都是直接给出的,而未作出计算,不过也有是将其作为锯齿角的,并且结合书上的内容,在此就将此作为锯齿角理解,那何谓步进角,下面公式将给出)为7.5度。(也就是说锯齿之间的单位角度),不进一圈总共需要360度,故有48个锯齿。 在此对电路图部分不再给出,具体引脚连接接下来给出。本例所使用的电机驱动芯片为达林顿驱动器(ULN2003),通过P1.0~P1.3分别接通步进电机的驱动线圈来控制步进电机的运转。注意如果直接使用单片机通过驱动芯片驱动电机,力矩可能不够大,效果不是很好,因为ULN2003的驱动电压为12V,而单片机系统电压为5V,故请读者注意此点,在设计电路时,另施电压。 步进电机要想正常工作,必须有驱动信号,转动的速度与驱动信号的频率是成正比的。(实例中将会给出并予以说明)接下来我们看看对于电机驱动中的信号的产生。 本例中采用的步进电机为四项,三项驱动和四项驱动原理上 是一样的。假设步进电机的四个项为:A、B、C、D。它的拍数可由读者任意设定(即步进节奏)。再继续下面的内容时,我们现在此给出一个计算步进电机的公式:Qs=360/NZr,其中N=McC 为运行的拍数,McC为控制绕组项数,C为状态系数,当采用单双本项拍数时,C=1,当采用单双本项一倍拍数时,C=2。(此处说的本项拍数,如三项为单三拍,双三拍。本项一倍拍数为单六拍,简言之,三拍为1.六拍为2对于四项则四拍为1,8拍为2(说的有些玄乎,手中板砖还望留情)),Zr为转子齿数,先来看看单四拍,即A→B→C→D→A.因为上述已经给出了锯齿数,此例C=1,所以Qs=360/(4*1*48)=1.875°。故此电机的步进角为1.875°(既步与步之间的角度),因为行进是和脉冲有关的,一个脉冲行进一步,那么行进一圈,所需脉冲数为:360/1.875=192个脉冲。同时我们如果控制这些脉冲的频率就可以直接控制步进电机的运转速度了。继续我们的单四拍,运行方向A→B→C→D →A。(假设为正转)则在程序中对应的操作执行码为:(硬件连接时P1口的高四位不用全置1,此处只需用到低四位) P1.3 P1.2 P1.1 P1.0 D C B A (对应4个线圈) 1 1 1 0 0xfe (根据外部链接电路定,也可以是0001,此处采用低电平导通,导通A项线圈) 1 1 0 1 0xfd (导通B项线圈) 1 0 1 1 0xfb (导通C项线圈) 课程设计任务书 学生姓名:专业班级:自动化0903班 指导教师:工作单位:自动化学院 题目: 二相步进电机控制系统地设计 初始条件: 采用8086最小模式,扩展4K地EPROM及2K地RAM,利用L298 ,输出双极性模拟电压驱动二相步进电机,使其按不同速度正反转,电机以八个开关以补码形式给定输入并以发光二极管显示出来,转速为-500rpm~+500rpm b5E2R。 要求完成地主要任务: 1.硬件设计:系统总原理图及各部分详细原理图 2.软件设计:系统总体流程图、步进电机四拍,八拍各模块流程图、显示模块流程图等 3.编写程序:能够完成上述任务 4.完成符合要求地设计说明书 时间安排:2012年6月25日~2012年7月3日 指导教师签名:年月日 系主任(或责任教师)签名:年月日 目录 摘要1 1 设计任务及要求2 1.1 设计任务2 1.2 任务分析2 2 方案选择及论证3 2.1 总体思路3 2.2 控制部分设计4 2.3驱动电路部分设计4 3 硬件电路设计模块5 3.1硬件系统总原理图5 3.2控制部分6 3.2.1 8086CPU地介绍6 3.2.2 8255A地介绍7 3.2.3原理分析10 3.3步进电机地介绍12 3.3.1 步进电机地特点12 3.3.2 步进电机工作原理13 3.3.3 二相步进电机13 3.4 电机驱动部分14 3.4.1 L298芯片介绍14 3.4.2 驱动电路原理分析15 3.5 电机正反转与调速电路17 4 软件设计18 4.1 设计思路18 4.2 各程序流程图18 5 系统仿真20 小结体会23 参考文献24 附录一系统地总设计图25 附录二部分代码26 水准仪及其使用方法 高程测量是测绘地形图的基本工作之一,另外大量的工程、建筑施工也必须量测地面高程,利用水准仪进行水准测量是精密测量高程的主要方法。 一、水准仪器组合: 1.望远镜 2.调整手轮 3.圆水准器4.微调手轮5.水平制动手轮6.管水准器7.水平微调手轮8.脚架 二、操作要点: 在未知两点间,摆开三脚架,从仪器箱取出水准仪安放在三脚架上,利用三个机座螺丝调平,使圆气泡居中,跟着调平管水准器。水平制动手轮是调平的,在水平镜内通过三角棱镜反射,水平重合,就是平水。将望远镜对准未知点(1)上的塔尺,再次调平管水平器重合,读出塔尺 的读数(后视),把望远镜旋转到未知点(2)的塔尺,调整管水平器,读出塔尺的读数(前视),记到记录本上。 计算公式:两点高差=后视-前视。 三、校正方法: 将仪器摆在两固定点中间,标出两点的水平线,称为a、b线,移动仪器到固定点一端,标出两点的水平线,称为a’、b ’。计算如果a-b≠a’-b’时,将望远镜横丝对准偏差一半的数值。用校针将水准仪的上下螺钉调整,使管水平泡吻合为止。重复以上做法,直到相等为止。 四、水准仪的使用方法 水准仪的使用包括:水准仪的安置、粗平、瞄准、精平、读数五个步骤。 1. 安置 安置是将仪器安装在可以伸缩的三脚架上并置于两观测点之间。首先打开三脚架并使高度适中,用目估法使架头大致水平并检查脚架是否牢固,然后打开仪器箱,用连接螺旋将水准仪器连接在三脚架上。 2. 粗平?粗平是使仪器的视线粗略水平,利用脚螺旋置园水准气泡居于园指标圈之中。具体方法用仪器练习。在整平过程中,气泡移动的方向与大姆指运动的方向一致。 3. 瞄准?瞄准是用望远镜准确地瞄准目标。首先是把望远镜对向远处明亮的背景,转动目镜调焦螺旋,使十字丝最清晰。再松开固定螺旋,旋转望远镜,使照门和准星的连接对准水准尺,拧紧固定螺旋。最后转动物镜对光螺旋,使水准尺的清晰地落在十字丝平面上,再转动微动螺旋,使水准尺的像靠于十字竖丝的一侧。 4. 精平 精平是使望远镜的视线精确水平。微倾水准仪,在水准管上部装有一组棱镜,可将水准管气 将“电机固有步距角”细分成若干小步的驱动方法,称为细分驱动,细分是通过驱动器精确控制步进电机的相电流实现的,与电机本身无关。其原理是,让定子通电相电流并不一次升到位,而断电相电流并不一次降为0(绕组电流波形不再是近似方波,而是N级近似阶梯波),则定子绕组电流所产生的磁场合力,会使转子有N个新的平衡位置(形成N个步距角)。 最新技术发展: 国内外对细分驱动技术的研究十分活跃,高性能的细分驱动电路,可以细分到上千甚至任意细分。目前已经能够做到通过复杂的计算使细分后的步距角均匀一致,大大提高了步进电机的脉冲分辨率,减小或消除了震荡、噪声和转矩波动,使步进电机更具有“类伺服”特性。 采用细分技术与步进电机精度提高的关系:步进电机的细分技术实质上是一种电子阻尼技术,其主要目的是减弱或消除步进电机的低频振动,提高电机的运转精度只是细分技术的一个附带功能。 步电机系统解决方案 细分后电机运转时对每一个脉冲的分辨率提高了,但运转精度能 否达到或接近脉冲分辨率还取决于细分驱动器的细分电流控制精度 等其它因素。不同厂家的细分驱动器精度可能差别很大;细分数越大精度越难控制。 真正的细分对驱动器要有相当高的技术要求和工艺要求,成本亦会较高。国内有一些驱动器采用对电机相电流进行“平滑”处理来取代细分,属于“假细分”,“平滑”并不产生微步,会引起电机力矩的下降。真正的细分控制不但不会引起电机力矩的下降,相反,力矩会有所增加。 对实际步距角的作用:在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足自己对步距角的要求。如果使用细分驱动器,则用户只需在驱动器上改变细分数,就可以大幅度改变实际步距角,步进电机的‘相数’对改变实际步距角的作用几乎可以忽略不计。 深圳市维科特机电有限公司成立于2005年,是步进电机产品的销售、系统集成和应用方案提供商。我们和全球产品性价比高的生产 厂家合作,结合本公司专家团队多年的客户服务经验,给客户提供有 步电机系统解决方案 电机驱动器使用说明书 L298N是ST公司生产的一种高电压、大电流电机驱动芯片。该芯片采用15脚封装。主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。 简要说明: 一、尺寸:80mmX45mm 二、主要芯片:L298N、光电耦合器 三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下) 四、最大工作电流:2.5A 五、额定功率:25W 特点:1、具有信号指示。 2、转速可调 3、抗干扰能力强 4、具有过电压和过电流保护 5、可单独控制两台直流电机 6、可单独控制一台步进电机 7、PWM脉宽平滑调速 8、可实现正反转 9、采用光电隔离 六、有详细使用说明书 七、提供相关软件 八、提供例程及其学习资料 实例一:步进电机的控制实例 步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。 一、步进电机最大特点是: 1、它是通过输入脉冲信号来进行控制的。 2、电机的总转动角度由输入脉冲数决定。 3、电机的转速由脉冲信号频率决定。 二、步进电机的驱动电路 根据控制信号工作,控制信号由单片机产生。(或者其他信号源) 如图:按CTRL并点击(L298N驱动器与直流电机接线图) 三、基本原理作用如下: 两相四拍工作模式时序图: 水 准 测 量 基本知识 1.水准测量原理 工程上常用的高程测量方法有几何水准测量、三角高程测量、GPS 测高及在特定对象和条件下采用的物理高程测量,其中几何水准测量是目前高程测量中精度最高、应用最普遍的测量方法。 如图2-1所示,设在地面A 、B 两点上竖立标尺(水准尺),在A 、B 两点之间安置水准仪,利用水准仪提供一条水平视线,分别截取A 、B 两点标尺上读数a 、b ,显然 A B H a H b +=+ A 、 B 两点的高差h AB 可写为 AB h a b =- A 点高程H A 已知, 求出 B 点高程 B A AB H H h =+ 我们规定A 点水准尺读数a 为后视读数,B 点水准尺读数b 为前视读数。 图 2-1 如果A 、B 两地距离较远时,可以用连续水准测量的方法。中间可设置转点TP (临时高程传递点,须放置尺垫),如图2-2所示 11h a =, 333h a b =-,……, n n n h a b =-。 123......AB n i h h h h h h =+++=∑ 于是,可以求得A 、B 之间的高程差 AB i i h a b =-∑∑ B 点高程 B A AB H H h =+. 图 2-2 2.水准仪介绍: 水准仪是提供水平视线的仪器,按精度分,水准仪通常有DS 05、DS 1、DS 3等几种。其中“D ”和“S ”分别为“”和“水准仪”首字汉语拼音的首字母,而下标是仪器的精度指标,即每千米测量中的偶然误差(以mm 为单位)。目前常用的水准仪从构造上可分为两大类:利用水准管来获得水平视线的“微倾式水准仪”和利用补偿器来获得水平视线的“自动安平水准仪”。此外,还有一种新型的水准仪——“电子水准仪”,它配合条形码标尺,利用数字化图像处理的方法,可自动显示高程和距离,使水准测量实现了自动化。 水准仪主要由望远镜、水准器、基座三部分组成。 (1) DS 3微倾式水准仪 1.仪器介绍 四相步进电机驱动电路及驱动程序设计 我们用一个单片机控制多个步进电机指挥跳舞机器人的双肩、双肘和双脚伴着音乐做出各种协调舒缓充满感情的动作,荣获一等奖。电路采用74373锁存,74LS244和ULN2003作电压和电流驱动,单片机(Atc52)作脉冲序列信号发生器。程序设计基于中断服务和总线分时利用方式,实时更新各个电机的速度、方向。整个舞蹈由运动数据所决定的一截截动作无缝连接而成。本文主要介绍一下这个机器人的四相五线制步进电机驱动电路及程序设计. 1、步进电机简介 步进电机根据内部线圈个数不同分为二相制、三相制、四相制等。本文以四相制为例介绍其内部结构。图1为四相五线制步进电机内部结构示意图。 2、四相五线制步进电机的驱动电路 电路主要由单片机工作外围电路、信号锁存和放大电路组成。我们利用了单片机的I/O端口,通过74373锁存,由74LS244驱动,ULN2003对信号进行放大。8个电机共用4bit I/O端口作为数据总线,向电机传送步进脉冲。每个电机分配1bit的I/O端口用作74373锁存信号,锁存步进电机四相脉冲,经ULN2003放大到12V驱动电机运转。 电路原理图(部分)如图2所示。 (1)Intel 8051系列单片机是一种8位的嵌入式控制器,可寻址64K字节,共有32个可编程双向I/O口,分别称为P0~P3。该系列单片机上集成8K的ROM,128字节RAM可供使用。 (2)74LS244为三态控制芯片,目的是使单片机足以驱动ULN2003。 ULN2003是常用的达林顿管阵列,工作电压是12V,可以提供足够的电流以驱动步进电机。关于这些芯片的详细介绍可参见它们各自的数据手册。 (3)74373是电平控制锁存器,它可使多个步进电机共用一组数据总线。我们用P1.0~P1.7作为8个电机的锁存信号输出端,见表1。 这是一种基于总线分时复用的方式,以动态扫描的方式来发送控制信号,这和高级操作系统里的多任务进程调度的思想一致。这种方法明显的好处是节省I/O口,使系统可以控制更多的步进电机。本电路设计为控制8个。 3 、程序设计 传统的步进电机驱动程序利用简单的条件循环来发送脉冲序列,但当电机数目发生变化时,编程繁杂,冗余代码较多,难以做到信号占空比一致,进而产生“抖动” 现象。下面提出一种基于中断服务方式,面向舞蹈动作,可实时改变各个电机速度和方向(每200ms可改变一次)的程序设计方法。 3.1 速度归一化和线性关系 我们将速度量化成一个-128~127内可变的数,正号代表正转,负号代表返转,称之归一化速度(-128~127为一个字节)。给每个电机分 水准仪使用方法及注意事项 水准仪广泛用于建筑行业,是测量水平高低的仪器,具有精度高、使用方便、快速、可靠等优点,使用在引测、大面积场地测量、楼面水平线标志、沉降观测等。现介绍水准仪的使用方法。 一、水准仪器组合: 1.望远镜 2.调整手轮 3.圆水准器 4.微调手轮 5.水平制动手轮 6.管水准器 7.水平微调手轮 8.脚架 二、操作要点: 在未知两点间,摆开三脚架,从仪器箱取出水准仪安放在三脚架上,利用三个机座螺丝调平,使圆气泡居中,跟着调平管水准器。水平制动手轮是调平的,在水平镜内通过三角棱镜反射,水平重合,就是平水。将望远镜对准未知点(1)上的塔尺,再次调平管水平器重合,读出塔尺的读数(后视),把望远镜旋转到未知点(2)的塔尺,调整管水平器,读出塔尺的读数(前视),记到记录本上。 计算公式:两点高差=后视-前视。 三、校正方法: 将仪器摆在两固定点中间,标出两点的水平线,称为a、b线,移动仪器到固定点一端,标出两点的水平线,称为a’、b ’。计算如果a-b≠a’-b ’时,将望远镜横丝对准偏差一半的数值。用校针将水准仪的上下螺钉调整,使管水平泡吻合为止。重复以上做法,直到相等为止。 四、保养与维修 1.水准仪是精密的光学仪器,正确合理使用和保管对仪器精度和寿命有很大的作用; 2.避免阳光直晒,不许可证随便拆卸仪器; 3.每个微调都应轻轻转动,不要用力过大。镜片、光学片不准用手触片; 4.仪器有故障,由熟悉仪器结构者或修理部修理; 5.每次使用完后,应对仪器擦干净,保持干燥。 S3水准仪的结构和使用方法 (一) 水准测量仪器 水准测量用的仪器、工具:水准仪、水准尺和尺垫。 1. 水准尺和尺垫 水准尺是水准测量中用于高差量度的标尺,水准尺制造用材有优质木材、合金材和玻璃钢等几种,有2 m,3 m,5 m等多种长度和整尺、折尺、塔尺等多种类型。水准尺按精度高低可分为精密水准尺和普通水准尺。 (1) 普通水准尺 材料:用木料、铝材和玻璃钢制成。 结构:尺长多为3 m,两根为一副,且为双面(黑、红面)刻划的直尺,每隔1 cm印刷有黑白或红白相间的分划。每分米处注有数字,对一对水准尺而言,黑、红面注记的零点不同。黑面尺的尺底端从零开始注记读数,两尺的红面尺底端分别从常数4687 mm和4787 mm开始,称为尺常数K。即K1=4.687 m,K2=4.787 m。设尺常数是为了检核用。 (2)精密水准尺 材料:框架用木料制成,分划部分用镍铁合金做成带状。 结构:尺长多为3 m,两根为一副。在尺带上有左右两排线状分划,分别称为基本分划和辅助分划,格值1 cm。这种水准尺配合精密水准仪使用。 (3)尺垫(尺台) 附件: ORG 0000H LJMP MAIN ORG 0003H LJMP Speed_Up ORG 0013H LJMP Speed_Down ORG 0100H MAIN: ;打开外部中断IT0/IT1 SETB EA SETB EX0 SETB EX1 SETB IT0 SETB IT1 ;扫描键盘,无键按下显示0,并继续扫描 MAKEY: MOV DPTR,#TAB MOV A,#0 MOVC A,@A+DPTR MOV P0,A MOV P3,#0FFH MOV A,P3 CPL A JZ MAKEY LCALL D10MS JZ MAKEY ;当有键按下时,启动步行电机转动 Speed EQU 20H Num EQU 21H MOV Speed,#60 ;Speed初始化,Speed控制延时的时间,即脉冲的频率 MOV Num,#1 ;Num初始化,Num存放数码管显示的转速数值 JNB ACC.4,TO_TWO ;默认设置为正向转动,转速为1,当有反向键按下,按反向转动 ;------------------------ 1号程序:控制步行电机正转-------------------------------- TO_ONE: MOV R7,#4 MOV A,#01H MOV P3,#0FFH LP1: MOV P1,A LCALL DELAY LCALL DISPLAY RL A ; 正向输入脉冲信号 DJNZ R7,LP1 JNB P3.4,TO_TWO ; 有反向键按下,跳转到2号程序 LJMP TO_ONE ;------------------------2号程序:控制步行电机反转---------------------------------- TO_TWO: MOV R7,#4 MOV A,#08H MOV P3,#0FFH LP2: MOV P1,A LCALL DELAY LCALL DISPLAY RR A ; 反向输入脉冲信号 DJNZ R7,LP2 JNB P3.5,TO_ONE ;有正向键按下,跳转到1号程序 LJMP TO_TWO ;----------------------------中断服务程序----------------------------------------------- Speed_Up: ; 外部中断IT0,控制加速 PUSH ACC LCALL D10MS MOV A,Speed CJNE A,#12,L1 ; 最大速度时,速度不再增加 LJMP L2 L1: ; 速度加1(减小脉冲周期) SUBB A,#12 MOV Speed,A INC Num L2: POP ACC RETI Speed_Down: ;外部中断IT1,控制减速 PUSH ACC 第三节步进电动机及其驱动 一、步进电机的特点与种类 1.步进电机的特点 步进电机又称脉冲电机。它是将电脉冲信号转换成机械角位移的执行元件。每当输入一个电脉冲时,转子就转过一个相应的步距角。转子角位移的大小及转速分别与输入的电脉冲数及频率成正比,并在时间上与输入脉冲同步。只要控制输入电脉冲的数量、频率以及电机绕组通电相序即可获得所需的转角、转速及转向。 步进电动机具有以下特点: ?工作状态不易受各种干扰因素(如电压波动、电流大小与波形变化、温度等)的影响; ?步进电动机的步距角有误差,转子转过一定步数以后也会出现累积误差,但转子转过一转以后,其累积误差变为“零” ; ?由于可以直接用数字信号控制,与微机接口比较容易; ?控制性能好,在起动、停止、反转时不易“丢步”; ?不需要传感器进行反馈,可以进行开环控制; ?缺点是能量效率较低。 就常用的旋转式步进电动机的转子结构来说,可将其分为以下三种: (1)可变磁阻(VR-Variable Reluctance),也叫反应式步进电动机 (2)永磁(PM-Permanent Magnet)型 (3)混合(HB-Hybrid)型 (1)可变磁阻(VR-Variable Reluctance) 结构原理:该类电动机由定子绕组产生的反应电磁力吸引用软磁钢制成的齿形转子作步进驱动,故又称作反应式步进电动机。其结构原理如图3.5定子1 上嵌有线圈,转子2朝定子与转子之间磁阻最小方向转动,并由此而得名可变磁阻型。 图3.6 可变式阻步进电机 可变磁阻步进电机的特点: 反应式电动机的定子与转子均不含永久磁铁,故无励磁时没有保持力; 需要将气隙作得尽可能小,例如几个微米; 结构简单,运行频率高,可产生中等转矩,步距角小(0.09~9°) 制造材料费用低; 有些数控机床及工业机器人上使用。 (3)混合(HB-Hybrid)型 结构原理 这类电机是PM式和VR式的复合形式。其定子与VR类似,表面制有小齿,转子由永磁铁和铁心构成,同样切有小齿,为了减小步距角可以在结构上增加转子和定子的齿数。其结构如图3.7所示。 混合式步进电机特点: HB兼有PM和VR式步进电机的特点: 步距角可以做得较小(0.9~3.6°); 无励磁时具有保持力; 可以产生较大转矩,应用较广。 介绍二相步进电机驱动芯片THB6064AH及其应用 摘要: THB6064AH是北京海华博远科技与日本东芝半导体公司合作推出的高性能步进电机驱动芯片,本文主 要介绍它的原理及其应用。其稳定的性能、便宜的价格、简洁的外围线路,为实现高性能、低成本、小型化步进电机驱动方案提供了最佳选择。 引言:步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。步进电机具有惯量低、定位精度高、无累积误差、控制简单等特点,在机电一体化产品中应用广泛,常用作定位控制和定速控制。然而,随着市场竞争起来越激烈,对产品的成本、高度集成化、功能模块化等方面要求也越来越高。选择专用驱动芯片的步进电机驱动方案越来越受重视。目前市面上常见的双极型微步电机驱动芯片最高细分在16细分以内,输出峰值电流都在3.5A 以内,耐压限制在40VDC。像A3977、TA8435、TB6560A、THB6016等,只能匹配2.5A以内、57机座以下的电机,无法驱动更大功率的步进电机。为了打破这一局限,北京海华博远科技与日本东芝半导体公司合作推出高耐压、大电流、多细分高性能步进电机驱动芯片 THB6064AH。 一: THB6064AH 简介 THB6064AH 是北京海华博远科技与日本东芝半导体公司合作推出的,是一款整合逻辑模块和功率模块于一身的高性能两相混合式步进电机驱动芯片。配合简单的外围电路即可实现高性能、多细分、大电流的步进电机驱动。因其驱动噪音低、震动小,性能可靠、性价比高的特点,适用于各行业的自动化设备。 其主要特点有: ● 双全桥MOSFET驱动,低导通电阻Ron=0.4Ω(上桥+下桥) ● 耐压高达50VDC,VM工作电压范围大 ● 峰值电流4.5A,输出电流连续可调 ● 多达8种细分可选(1/2、1/8、1/10、1/16、1/20、1/32、1/40、1/64) ● 采用脉宽调制 斩波驱动方式 ● 自动限流、半流锁定功能 ● 提供四种衰减方式切换选择 ●内置温度保护及过流保护 ●低电压检测(UVLO)电路 水准仪的使用方法及注意事项 令狐采学 水准仪广泛用于建筑行业,是测量水平高低的仪器,具有精度高、使用方便、快速、可靠等优点,使用在引测、大面积场地测量、楼面水平线标志、沉降观测等。现介绍水准仪的使用方法。 一、水准仪器组合: 1.望远镜 2.调整手轮 3.圆水准器 4.微调手轮 5.水平制动手轮 6.管水准器 7.水平微调手轮 8.脚架 二、操作要点: 在未知两点间,摆开三脚架,从仪器箱取出水准仪安放在三脚架上,利用三个机座螺丝调平,使圆气泡居中,跟着调平管水准器。水平制动手轮是调平的,在水平镜内通过三角棱镜反射,水平重合,就是平水。将望远镜对准未知点(1)上的塔尺,再次调平管水平器重合,读出塔尺的读数(后视),把望远镜旋转到未知点(2)的塔尺,调整管水平器,读出塔尺的读数(前视),记到记录本上。 计算公式:两点高差=后视-前视。 三、校正方法: 将仪器摆在两固定点中间,标出两点的水平线,称为a、b线,移动仪器到固定点一端,标出两点的水平线,称为a’、b ’。计算如果a-b≠a’-b ’时,将望远镜横丝对准偏差一半的数值。用校针将水准仪的上下螺钉调整,使管水平泡吻合为止。重 复以上做法,直到相等为止。 四、保养与维修 1.水准仪是精密的光学仪器,正确合理使用和保管对仪器精度和寿命有很大的作用; 2.避免阳光直晒,不许可证随便拆卸仪器; 3.每个微调都应轻轻转动,不要用力过大。镜片、光学片不准用手触片; 4.仪器有故障,由熟悉仪器结构者或修理部修理; 5.每次使用完后,应对仪器擦干净,保持干燥。 S3水准仪的结构和使用方法 (一) 水准测量仪器 水准测量用的仪器、工具:水准仪、水准尺和尺垫。 1. 水准尺和尺垫 水准尺是水准测量中用于高差量度的标尺,水准尺制造用材有优质木材、合金材和玻璃钢等几种,有2 m,3 m,5 m等多种长度和整尺、折尺、塔尺等多种类型。水准尺按精度高低可分为精密水准尺和普通水准尺。 (1) 普通水准尺 材料:用木料、铝材和玻璃钢制成。 结构:尺长多为3 m,两根为一副,且为双面(黑、红面)刻划的直尺,每隔1 cm印刷有黑白或红白相间的分划。每分米处注有数字,对一对水准尺而言,黑、红面注记的零点不同。黑面尺水准仪测量高程的方法和步骤
步进电机及其驱动系统简介中英文翻译
两相混合式步进电机驱动器使用说明
水准仪的使用方法及注意事项
步进电机程序编写及说明
二相步进电机控制系统实施方案
水准仪及其使用方法
步进电机驱动器的技术发展
(整理)二相步进电机驱动.
水准仪经纬仪使用方法详细图解
四相步进电机驱动电路及驱动程序设计
水准仪使用方法及注意事项
步进电机驱动程序(汇编)
步进电机及其驱动电路
二相步进电机驱动芯片THB6064AH及其应用
水准仪的使用方法及注意事项