ZXMP S330系统特点
ZXMP S330系统特点
一.系统容量
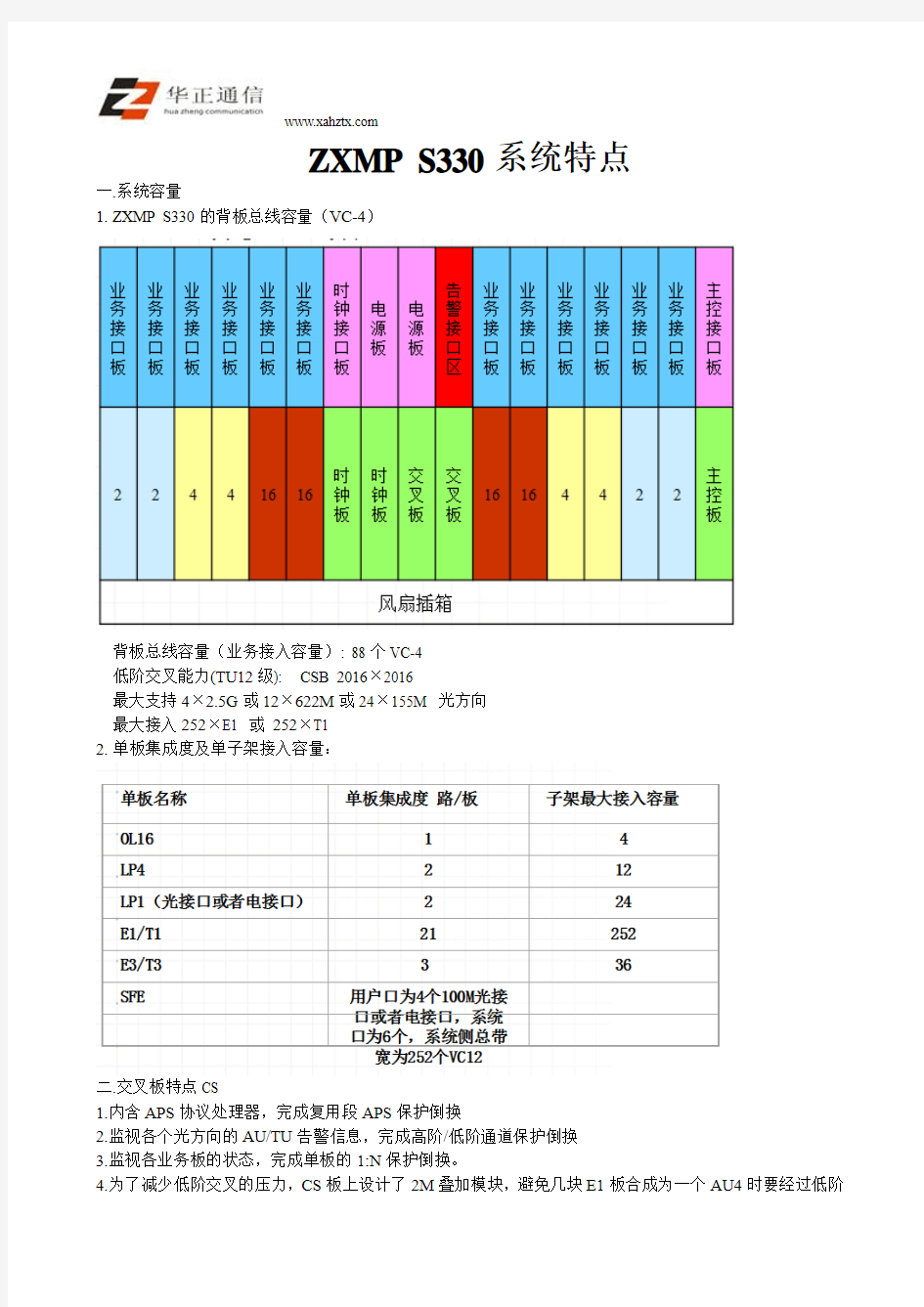
1.ZXMP S330的背板总线容量(VC-4)
背板总线容量(业务接入容量): 88个VC-4
低阶交叉能力(TU12级): CSB 2016×2016
最大支持4×2.5G或12×622M或24×155M 光方向
最大接入252×E1 或252×T1
2.单板集成度及单子架接入容量:
二.交叉板特点CS
1.内含APS协议处理器,完成复用段APS保护倒换
2.监视各个光方向的AU/TU告警信息,完成高阶/低阶通道保护倒换
3.监视各业务板的状态,完成单板的1:N保护倒换。
4.为了减少低阶交叉的压力,CS板上设计了2M叠加模块,避免几块E1板合成为一个AU4时要经过低阶
交叉模块,也避免了ZXMP-S360中在EP1板上作延时叠加所出现的问题
5.对没有配置业务的空闲通道可以插入AU-AIS信号或者通道未装载UNEQ信号
交叉能力:
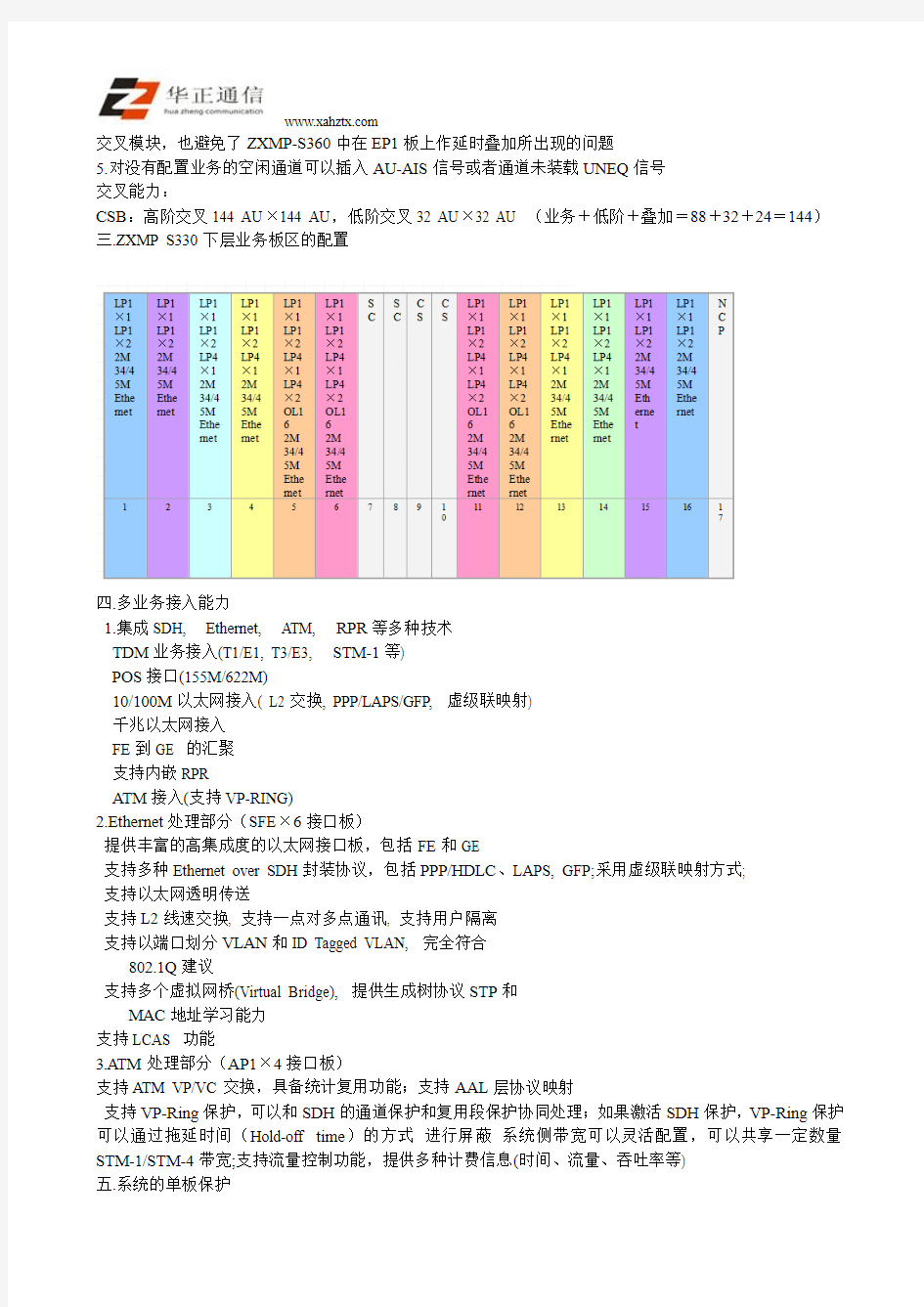
CSB:高阶交叉144 AU×144 AU,低阶交叉32 AU×32 AU (业务+低阶+叠加=88+32+24=144)三.ZXMP S330下层业务板区的配置
四.多业务接入能力
1.集成SDH, Ethernet, ATM, RPR等多种技术
TDM业务接入(T1/E1, T3/E3, STM-1等)
POS接口(155M/622M)
10/100M以太网接入( L2交换, PPP/LAPS/GFP, 虚级联映射)
千兆以太网接入
FE到GE 的汇聚
支持内嵌RPR
A TM接入(支持VP-RING)
2.Ethernet处理部分(SFE×6接口板)
提供丰富的高集成度的以太网接口板,包括FE和GE
支持多种Ethernet over SDH封装协议,包括PPP/HDLC、LAPS, GFP;采用虚级联映射方式;
支持以太网透明传送
支持L2线速交换, 支持一点对多点通讯, 支持用户隔离
支持以端口划分VLAN和ID Tagged VLAN, 完全符合
802.1Q建议
支持多个虚拟网桥(Virtual Bridge), 提供生成树协议STP和
MAC地址学习能力
支持LCAS 功能
3.ATM处理部分(AP1×4接口板)
支持ATM VP/VC交换,具备统计复用功能;支持AAL层协议映射
支持VP-Ring保护,可以和SDH的通道保护和复用段保护协同处理;如果激活SDH保护,VP-Ring保护可以通过拖延时间(Hold-off time)的方式进行屏蔽系统侧带宽可以灵活配置,可以共享一定数量STM-1/STM-4带宽;支持流量控制功能,提供多种计费信息(时间、流量、吞吐率等)
五.系统的单板保护
双电源输入(-48V), 支持电源告警检测;时钟板SC 1+1保护;交叉板CS 1+1保护;各种电支路板的1:N (N<=5)保护,电支路板包括: SFE板, E1/T1板, E3/T3板, EL1板;单个ZXMP S330系统子架可同时支持4组电支路的保护(只能保护VC4,不能保护ECC、公务等)
六.系统支路保护
系统(下层)共有12个支路板位置,分为左右两个工作区,A区1#-6#槽位,B区11#-16#槽位
定义:E1/T1/FE为I型业务,其使用的桥接板在接口区各业务槽位均可插放;E3/T3/STM-1(电)为II型业务,其使用的桥接板只能固定插放在接口区的1#和16#槽位。
同型(如同为I型和同为II型)的2种速率业务(如2M与FE)不能同时在一个工作区内共存(如A区),不同型的2种速率业务(如2M与STM-1电)可以在同一个区内共存。
各种电支路单板名称列表
2M的1:N支路保护板位排列示意图
FE配置与说明列表
FE的1:N支路保护板位排列示意图
34M/45M配置与说明列表
34M/45M的1:N支路保护板位排列示意图
155M配置与说明列表
155M的1:N支路保护板位排列示意图
混合的1:N支路保护板位排列示意图
交叉口通行能力计算
信号控制交叉路口通行能力计算 1 选取地点 交大东路与学院南路交叉口 2 测量时间 2014年11月2日17:30-18:30 3 观测内容: 信号灯周期,各进口处绿灯时间。由于人员有限,所以交通量的数据采用导论课测过的数据。调查时观察实际情况与既有调查数据是否相符,大小车比例是否相同。 4 信号控制交叉口通行能力计算方法 (1)一条直行或右转或左转专用车道的设计通行能力计算公式 C s或C r或C l=3600 [ t g?t0 i +1]φ C s、C r、C l——一条直行或右转或左转专用车道的设计通行能力,pcu/h T——信号灯周期,s t g——信号每周期内的改车道绿灯时间,s t0——绿灯亮后第一辆车启动、通过停车线的时间,s,如无本地实例数据,可采用2.3s t i——前后两辆车连续通过停车线的平均车头时距,s/pcu Φ——折减系数,可用0.8 对于右转专用车道,如果车辆行驶不受信号灯控制,则可认为适中的t0=0,t g=T, 则可简化为C r=3600 t i φ。 (2)直右车道通行能力计算公式:
C sr=C s (3)直左车道通行能力计算公式: 因左转车受交叉口内的交通条件影响,且通过时间大于直行车通过时间,一般约为直行车的1.5倍,需要对左转车数进行折减。 C sl=C s(1-β1′/2) 式中:β1′:直左车道中左转车所占的比例。 (4)直左右车道设计通行能力计算公式 C slr=C sl 5 CAD绘制平面交叉口布局图 6 通行能力计算 由于只有一个人,测量交通量任务较难,所以以下左转车的比例采用导论课上的调查数据, 信号灯按照东南西北四相位设计,信号配时周期为135s,进口道的黄灯时间,东、南、西、北绿灯时间各为75s,48s,75s,48s,φ=0.8,根据导论课所
机械设计基础第十四章 机械系统动力学
第十四章 机械系统动力学 14-11、在图14-19中,行星轮系各轮齿数为123z z z 、、,其质心与轮心重合,又齿轮1、2对质心12O O 、的转动惯量为12J J 、,系杆H 对的转动惯量为H J ,齿轮2的质量为2m ,现以齿轮1为等效构件,求该轮系的等效转动惯量J ν。 2222 2121221 12323121 13212 1 13222 12311212213121313 ( )()()()1()()()( )()()()o H H H o H J J J J m z z z z z z z z z O O z z z z z z z O O J J J J m z z z z z z z z νννωωω ωωωω ωω ωωωωνω=+++=-= += +=+-=++++++解: 14-12、机器主轴的角速度值1()rad ?从降到时2()rad ?,飞轮放出的功 (m)W N ,求飞轮的转动惯量。 max min 122 2 121 ()2 2F F Wy M d J W J ?ν??ωωωω==-=-? 解: 14-15、机器的一个稳定运动循环与主轴两转相对应,以曲柄和连杆所组成的转动副A 的中心为等效力的作用点,等效阻力变化曲线c A F S ν-如图14-22所示。等效驱动力a F ν为常数,等效构件(曲柄)的平均角速度值25/m rad s ?=, 3 H 1 2 3 2 1 H O 1 O 2
不均匀系数0.02δ=,曲柄长度0.5OA l m =,求装在主轴(曲柄轴)上的飞轮的转动惯量。 (a) W v 与时间关系图 (b )、能量指示图 a 2 24()2 3015m Wy=25N m 25 6.28250.02 c va OA vc OA OA va F W W F l F l l F N Mva N J kg m νν=∏?∏=∏+==∏= =?解:稳定运动循环过程 14-17、图14-24中各轮齿数为12213z z z z =、,,轮1为主动轮,在轮1上加力矩1M =常数。作用在轮 2 上的阻力距地变化为: 2r 22r 020M M M ??≤≤∏==∏≤≤∏=当时,常数;当时,,两轮对各自中心的转动惯量为12J J 、。轮的平均角速度值为m ω。若不均匀系数为δ,则:(1)画出以轮1为等效构件的等效力矩曲线M ν?-;(2)求出最大盈亏功;(3)求飞轮的转动惯量F J 。 图14-24 习题14-17图 40Nm 15∏ 12.5∏ 22.5∏ 15Nm ∏ 2∏ 2.5∏ 4∏ 25∏ 1 1 z 2 z 2 r M 2 M ∏ 2∏ 2?
城市道路交叉口与路段通行能力计算方法与公式
计算说明 一、路段通行能力与饱和度的计算说明 1、通行能力计算 计算路段单方向的通行能力,如“由东向西的通行能力”、“由南向北的通行能力” 0 n 。单=' C i ( 1-1) i丄 C 单 -------- 路段单向通行能力; C i ――第i条车道的通行能力; i ——车道编号,从道路中心至道路边缘依次编号;n ——路段单向车道数。 C i =C o '条 '交'车道(1-2) C。一一1条车道的理论通行能力,根据道路设计速度取表1-1中对应的建 议值: ■'条——车道折减系数,自中心线起第一条车道的折减系数为 1.00,第二 条车道的折减系数为0.80?0.89,第三条为0.65?0.78,第四条为0.50?0.65, 第五条以上为0.40?0.52; 交——交叉口折减系数,根据道路设计速度和路段两交叉口之间的距离 由表1-2确定:
表1-2交叉口折减系数 交叉口折趺系数畋]值]a = 0,50m/化h = 1.5m/sr, A= 15s) 车速恋叉口之阿e的更离W E) u(knVh)1003003004QQ500600700(too900100011003200 20 5.560.450.620.71OTO0.800.&30.S50.870型0.890.900 91 25 6.940-370…S40-64Q.7D0 750.78。 4.83Q?關0瞒0,870.88 308.33DJI0.480.5S0.650.700.730.760.79o.ai0.82 D.83o.as 35^.120.270,420.520.600 W0.&9Q.7Z0.750.770.790,800,82 40IL.1J0.230.3?0.48譬0.600.640.6£0.71 亠—a.0.730.750.770.7& 4512.SO0.200.340-43OJQ05fi0,60O.M0.67O.W0.720.7-10.75 5013.SB0.l?0.300-39&,460.520.56Q GO0.630.660.680.700.72 车道一一车道宽度折减系数,根据车道宽度由表1-3确定: 表1-3车道折减系数 根据车道宽度b的通行能力折减系数"车厦ji io-? r 伽宽度Mm)通行能力折減系散“他车道宽度城H1)逋行旎力折琏系數呻也 3.50 1.{?30()0.85 3.250-弭 2.750.77 *? 1 . Ji kl< HI4 1 AtAi ks Vrfe Z? Jfcfr Filil EOb I T虫.庄::昔'liir :拓匸#律/r-"fct. 2、饱和度计算 V/C ――实际流量除以通行能力
交叉口通行能力计算(HCM)
(三)交叉口流量、延误、信号配时调查与分析 1、交叉口流量、延误、信号配时调查 (1)交叉口流量调查 交叉口的交通状况比较复杂,交叉口交通量调查一般采用人工观测法,也可采用车辆检测器采集数据。人工观测法在选定的交叉口,在规定的观测时段,记录通过交叉口每个进口道停车线断面的车辆数,一般要对每个进口道分方向(左转、直行、右转3个方向)、分车型进行观测。 分方向、分车型进行交叉口交通量进行观测时,一般需要较多的观测人员。如果交通量较大,可在每个进口安排5~7名观测员,2人记录左转机动车和非机动车数量并报时,2~3人记录直行机动车和非机动车数量并报时,2人记录右转机动车和非机动车数量。如果需要保证较高的精度,可适当增加1~2名观测员。 调查时间一般选在高峰时间段进行,数据记录时至少每隔15min做一次记录,最好每5min记录一次将。信号交叉口交通量的人工观测和交叉口延误的点样本法综合进行。交叉口流量观测表见表5。 (2)交叉口延误调查(表6) (3)交叉口道路条件和信号配时调查(表7) 2、交叉口分析 (1)交通量换算 在实测交通量时,一般分车型计测车辆数,在交通流中不同车型的车辆由于其占有的空间与时间的不同,同一车道的通过数量也不同,而在交通运营中常常需要将其换算成某种单一车型的数量,通称之为交通量换算。获得交叉口交通量数据后,一般需要进行车型换算,得到每个方向和进口的换算交通量(当量交通量)。车型换算标准可参考表8、表9。 (2)交叉口交通量汇总表(表10) (3)交叉口流量流向图 绘制交叉口流量流向图时所采用的交通量为换算交通量,见图1。 (4)交叉口交通改善措施(参考案例二)
消化系统生理.
第八章消化系统生理 1.消化系统生理概述 2.机械性消化和化学性消化 3.吸收 4.消化系统功能的调节 第一节概述 一、消化吸收的概念 消化:食物在消化管内被分解成小分子物质的过程。 吸收:小分子物质透过消化道粘膜进入血液和淋巴液的过程。 二、消化的方式 机械性消化:通过消化道肌肉的收缩和舒张,使食物磨碎、变小,并将其向消化道远端推送。 化学性消化:通过消化腺分泌的消化液,使三大营养物质进行化学分解,成为小分子物质。 两种方式同时进行,互相配合。 三、消化管平滑肌的生理特性 (一)一般生理特性 1.兴奋性较低,收缩缓慢 2.自律性 3.紧张性 4.富有伸展性 5.对某些理化刺激较敏感
(二)电生理特性 1.静息膜电位:不稳定,波动较大。 2.动作电位:时程长,幅值低,其产生主要依赖Ca2+内流。 3.慢波电位:消化管平滑肌细胞在静息膜电位基础上可自发产生节律性去极化,由于这种周期性波动的发生频率较慢而被称为慢波电位,又称基本电节律。 胃平滑肌慢波——3次/分 四、消化腺的分泌功能 五、胃肠激素 概念:胃肠内分泌细胞分泌的激素。 生理作用: 1 调节消化腺分泌和消化管运动; 2 调节其他激素的释放; 3 营养作用。 脑肠肽: 第二节机械性消化 一、咀嚼和吞咽 蠕动:食管肌肉的顺序舒张和收缩形成的一种向前推进的波形运动。 二、胃的运动 (一)胃的运动形式及其作用 1.紧张性收缩
2.容受性舒张 食物→咽、食道感受器→胃底和胃体部肌肉舒张→胃容积增大 意义:使胃容量适应于大量食物的涌入。 3.蠕动 (二)胃的排空及其控制 概念:食物由胃排入十二指肠的过程。 排空速度:流体食物>固体食物 小颗粒食物>大颗粒食物 糖>蛋白质>脂肪 混合食物需4-6小时 机制: 胃运动→胃内压↑→胃内压>十二指肠压→食糜进入十二指肠 胃的排空取决于胃和十二指肠之间的压力差。 1 胃内促进排空的因素 胃内容物→胃扩张→胃运动↑ 胃内容物→胃泌素释放→胃运动↑ 2 十二指肠内抑制排空的因素 (1)肠—胃反射 食糜→肠壁上感受器→胃运动↓ (2)肠抑胃素 食糜→小肠粘膜→促胰液素、抑胃肽→胃运动↓ 胃内因素→胃运动↑→排空→十二指肠因素→胃运动↓→排空
儿童消化系统解剖生理特点.
第五章消化系统疾病 学习要点 1. 儿童消化系统的解剖生理特点。 2. 鹅口疮及疱疹性口腔炎的临床表现与治疗要点。 3. 儿童腹泻病的病因、发病机制及轮状病毒性肠炎的临床特点。 4. 轻型腹泻与重型腹泻的临床特点与治疗原则。 5. 脱水程度和性质的判定以及儿童腹泻病治疗中液体疗法的运用。 第一节儿童消化系统解剖生理特点 一、口腔 口腔为消化道的起端,具有吸吮、吞咽、咀嚼、消化、味觉、感觉和语言等功能。足月新生儿出生时已具有较好的吸吮和吞咽功能。新生儿及婴幼儿口腔黏膜薄嫩,血管丰富,唾液腺发育不完善,唾液分泌少,口腔黏膜干燥,易受损伤和感染。 3 个月以下婴儿唾液中淀 粉酶含量低,故不宜喂淀粉类食物。3?4个月时唾液分泌开始增加,但因婴儿口底浅,不 能及时吞咽全部唾液,常发生生理性流涎。 二、食管 新生儿和婴儿的食管呈漏斗状,黏膜纤弱、腺体缺乏、弹力组织及肌层发育不完善,食管下段括约肌发育不成熟,故10个月以下婴儿常发生胃食管反流。 三、胃婴儿胃呈水平位,贲门括约肌发育不成熟(松弛、张力低)而幽门括约肌发育良好,特别是吸奶时常吞入过多空气,故易发生生理性溢乳和呕吐。胃黏膜有丰富的血管,但腺体和杯状细胞较少,胃酸和各种酶的分泌少且酶活力较低,消化功能差。儿童胃容量随年龄增长而逐渐增加,新生儿期约为30?60ml ,1?3个月时为90 ?150ml ,1岁时为250 ?300ml , 5 岁时为700?850ml。胃排空时间随食物种类不同而异,水的排空时间为 1.5?2小时,母乳 2?3 小时,牛乳3?4小时;早产儿胃排空更慢,易发生胃潴留。 四、肠 儿童肠管相对比成人长,为身长的5?7倍(成人仅为4倍)。肠黏膜富含血管和淋巴组织,利于食物的消化吸收;但由于肠壁薄、通透性高且屏障功能差,肠内毒素、消化不全产物和过敏原等易经肠黏膜吸收入血,引起全身感染和变态反应性疾病。婴幼儿肠黏膜肌层发育差,肠系膜柔软而长,固定性差,易发生肠套叠和肠扭转。婴儿大脑皮层功能发育不完善,进食时常引起胃- 结肠反射,故大便次数常多于成人。
系统动力学(自己总结)
系统动力学 1.系统动力学的发展 系统动力学(简称SD—system dynamics)的出现于1956年,创始人为美国麻省理工学院的福瑞斯特教授。系统动力学是福瑞斯特教授于1958年为分析生产管理及库存管理等企业问题而提出的系统仿真方法,最初叫工业动态学。是一门分析研究信息反馈系统的学科,也是一门认识系统问题和解决系统问题的交叉综合学科。从系统方法论来说:系统动力学是结构的方法、功能的方法和历史的方法的统一。它基于系统论,吸收了控制论、信息论的精髓,是一门综合自然科学和社会科学的横向学科。 系统动力学的发展过程大致可分为三个阶段: 1)系统动力学的诞生—20世纪50-60年代 由于SD这种方法早期研究对象是以企业为中心的工业系统,初名也就叫工业动力学。这阶段主要是以福雷斯特教授在哈佛商业评论发表的《工业动力学》作为奠基之作,之后他又讲述了系统动力学的方法论和原理,系统产生动态行为的基本原理。后来,以福雷斯特教授对城市的兴衰问题进行深入的研究,提出了城市模型。 2)系统动力学发展成熟—20世纪70-80 这阶段主要的标准性成果是系统动力学世界模型与美国国家模型的研究成功。这两个模型的研究成功地解决了困扰经济学界长波问题,因此吸引了世界范围内学者的关注,促进它在世界范围内的传播与发展,确立了在社会经济问题研究中的学科地位。 3)系统动力学广泛运用与传播—20世纪90年代-至今 在这一阶段,SD在世界范围内得到广泛的传播,其应用范围更广泛,并且获得新的发展.系统动力学正加强与控制理论、系统科学、突变理论、耗散结构与分叉、结构稳定性分析、灵敏度分析、统计分析、参数估计、最优化技术应用、类属结构研究、专家系统等方面的联系。许多学者纷纷采用系统动力学方法来研究各自的社会经济问题,涉及到经济、能源、交通、环境、生态、生物、医学、工业、城市等广泛的领域。 2.系统动力学的原理 系统动力学是一门分析研究信息反馈系统的学科。它是系统科学中的一个分支,是跨越自然科学和社会科学的横向学科。系统动力学基于系统论,吸收控制论、信息论的精髓,是一门认识系统问题和解决系统问题交叉、综合性的新学科。从系统方法论来说,系统动力学的方法是结构方法、功能方法和历史方法的统一。 系统动力学是在系统论的基础上发展起来的,因此它包含着系统论的思想。系统动力学是以系统的结构决定着系统行为前提条件而展开研究的。它认为存在系统内的众多变量在它们相互作用的反馈环里有因果联系。反馈之间有系统的相
提高交叉口通行能力的具体方法及实例分析
二 〇 一 五 年 六 月 本科毕业论文 题 目:提高交叉口通行能力的具体方法及实例分析 学生姓名:白 健 学 院:土木工程学院 系 别:道路与交通系 专 业:交通工程 班 级:交通工程11-1班 指导教师:胡兵 讲师
摘要 改革开放以来,我国的国民经济持续增强,国民生产总值和人均收入水平有了很大的提高,交通运输业也得到了空前的发展,但是国家对公路建设的投入却相对滞后,使得道路中车多路少等问题日益严重。因此,如何充分有效的利用优先的资源加快公路建设,如何改善交通管理,挖掘现有交通设施的潜力,以缓解失衡的交通供求关系,是目前各个单位及部门亟需解决的问题。 现代的交通运输主要有:公路、铁路、水运、航空和管道运输五中方式,它们各有优势,相辅相成,组成综合运输体系,在国家经济参与国际市场竞争的今天,公路运输占有越来越重要的作用。它的激动灵活,方便快捷、服务面广,特别适合于中短途,从门到门的运输,因此,道路的在建设和现有的道路通行能力的大小,其运输效率的高低都对国民经济都有很重要的影响。 基于这些因素之下,对于城市道路来说,城市中道路的问题主要集中在城市道路交叉口的拥堵这方面,如何提高道路交叉口的通行能力成为了解决道路拥堵的首要问题。对于道路交叉口的拥堵问题有很多因素,例如:交叉口渠化设计不合理,交叉口信号配时方案不合理,交叉口道路过于狭窄,交叉口行人过街的影响等等原因,使得城市道路通行不流畅,极大的影响了人们的出行时间,降低了人们的出行效率。本论文主要研究的是如何提高交叉口的通行能力及其具体实例,解决交叉口通行能力的方法从这两个方面进行着手:1)交叉口渠化设计、2)交叉口信号配时方案优化。研究对象主要集中在呼和浩特市新城区的润宇家居的交叉口以及公安厅交叉口这两个较为典型的交叉口进行数据调查取证。调查的时间主要集中在下午17:00——18:00这个车辆通行较多的时间段,以此来发现交叉口典型的拥堵问题。 关键词:交叉口通行能力;信号配时;交叉口渠化;交通信号灯
(完整word版)系统动力学步骤
系统动力学分析步骤 (1)系统分析(分析问题,剖析要因) 1)调查收集有关系统的情况与统计数据 2)了解用户提出的要求、目的与明确所要解决的问题 3)分析系统的基本问题与主要问题、基本矛盾与主要矛盾、变量与主要变 量 4)初步划分系统的界限,并确定内生变量、外生变量和输入量 5)确定系统行为的参考模式 (2)系统的结构分析(处理系统信息,分析系统的反馈机制) 1)分析系统总体的与局部的反馈机制 2)划分系统的层次与子块 3)分析系统的变量、变量之间的关系,定义变量(包括常数),确定变量的 种类及主要变量。 4)确定回路及回路间的反馈耦合关系,初步确定系统的主回路及它们的性 质,分析主回路随时间转移的可能性 (3)确定定量的规范模型 1)确定系统中的状态、速率、辅助变量和建立主要变量之间的关系; 2)设计各非线性表函数和确定、估计各类参数; 3)给所有N方程、C方程与表函数赋值; (4)模型模拟与政策分析 1)以系统动力学的理论为指导进行模型模拟与政策分析,进而更深入地剖 析系统的问题; 2)寻找解决问题的决策,并尽可能付诸实施,取得实践结果,获取更丰富 的信息,发现新的矛盾与问题; 3)修改模型,包括结构与参数的修改; (5)模型的检验和评估 这一步骤的任务不是放在最后一起来做的,其中相当一部分是在上述过程中分散进行的。 参考模式:用图形表示重要变量,并推论和绘出与这些最有关的其他重要的两,从而突出、集中的勾画出有待研究的问题的发展趋势和轮廓,我们称这类随时间变化的变量图形为行为参考模式。在建模的过程中,要反复地参考这些模式。当系统的模型建成后,检验其有效性标准之一就是看模型产生的行为模式与参考模式是否大体一致。
宠物犬消化系统解剖生理特点汇总
宠物犬消化系统解剖生理特点 宠物犬为食肉目、犬科,其解剖生理特点与之相适应。 一、消化系统组成 消化管:口腔、咽、食管、胃、小肠、大肠、肛门。 消化腺:唾液腺(颧骨腺、腮腺、舌下腺、颌下腺)、肝脏、胰腺。 图1:宠物犬消化系统组成 二、解剖生理特点 犬的牙齿,上下颌各有一对尖锐的犬齿,体现了肉食动物善于撕咬猎物的特点,犬的臼齿也比较尖锐、强健,能切断食物,啃咬骨头时,上下齿之间的压力可达165千克,但不善咀嚼。因此,犬吃东西时真是“狼吞虎咽”,很少咀嚼。 犬的食管壁上有丰富的横纹肌,呕吐中枢发达。当吃进毒物后能引起强烈的呕吐反射,把吞入胃内的毒物排出,是一种比较独特的防御本领。犬的唾液腺发达,能分泌大量唾液,湿润口腔和饲料,便于咀嚼和吞咽。唾液中还含有溶菌酶,具有杀菌作用。在炎热的季节,依靠唾液中水分的蒸发散热,借以调节体温。因此,在夏天我们常可以看到犬张开大嘴,伸出长长的舌头就是为了代替发汗散热。犬胃呈不正梨形,胃液中盐酸的含量为 0.4~0.6%,在家畜中居首位。盐酸能使
蛋白质膨胀变性,便于分解消化。因此,犬对蛋白质的消化能力很强,这是其肉食习性的基础。 图2:宠物犬牙齿组成 犬在食后5~7小时就可将胃中的食物全部排空,要比其他草食或杂食动物快许多。犬的肠管较短,一般只有体长的3~4倍,而同样是单胃的马和兔的肠管为体长的12倍。犬的肠壁厚,吸收能力强,这些都是典型的肉食特征。 犬的肝脏比较大,相当于体重的3%左右,分泌的胆汁有利于脂肪的吸收。 犬的排粪中枢不发达,不能像其他家畜那样在行进状态下排粪。 犬对蛋白质和脂肪能很好地消化吸收,但因咀嚼不充分和肠管短,不具发酵能力,故对粗纤维的消化能力差。因此,给犬喂蔬菜时应切碎、煮熟,不宜整块、整棵地喂。
城市道路交叉口与路段通行能力计算方法与公式
一、路段通行能力与饱和度的计算说明 1、通行能力计算 计算路段单方向的通行能力,如“由东向西的通行能力”、“由南向北的通行能力”。 ∑=n i i C C 1=单 (1-1) 单C —— 路段单向通行能力; i C —— 第i 条车道的通行能力; i —— 车道编号,从道路中心至道路边缘依次编号; n —— 路段单向车道数。 车道交条ααα???=0C C i (1-2) 0C —— 1条车道的理论通行能力,根据道路设计速度取表1-1中对应的建议值: 表1-1 0C 值 条α —— 车道折减系数,自中心线起第一条车道的折减系数为,第二条车道的折减系数为~,第三条为~,第四条为~,第五条以上为~; 交α —— 交叉口折减系数,根据道路设计速度和路段两交叉口之间的距离由表1-2确定: 表1-2 交叉口折减系数 车道α —— 车道宽度折减系数,根据车道宽度由表1-3确定:
表1-3 车道折减系数 2、饱和度计算 C V / —— 实际流量除以通行能力。 二、交叉口通行能力与饱和度计算说明 1、通行能力计算 ∑=n i i C C 1=交叉口 (2-1) 交叉口C —— 交叉口通行能力; i C —— 交叉口各进口的通行能力; i —— 交叉口进口编号; n —— 交叉口进口数,n 为4或3。 ∑=K j j i C C 1=
(2-2) C——进口各车道的通行能力; j j——车道编号; K——进口车道数。 先计算各个车道的通行能力,再计算各个进口的通行能力,然后计算整个交叉口的通行能力。 用专用工具计算进口各车道通行能力,按直行、直左、直右、直左右、专左、专右的先后顺序。 (1)直行、直左、直右与直左右车道的通行能力计算: 需要输入的数据: ①信号周期T; ②对应相位的绿灯时间t; ③对应相位的有效绿灯时间j t; ④对应的车流量。 注意: “有效绿灯时间j t”项,只需设定一个不为零的数即可,建议与t相等。 “车流量”项, →对直行、直左与直左右车道的计算来说,只需输入一个不为零的数即可。 →对直左车道的计算来说,“车道总流量”项输入10,“车道左转流量” 项输入4。 必须严格按直行、直左、直右与直左右的顺序来计算。 结果只取“通行能力”一项。
系统动力学
目录 第一章绪论 1.1问题的提出 1.2研究的目的及意义 1.3国内外研究现状 第二章系统动力学及库存控制基本理论分析 2.1系统动力学的基本概念 2.1.1系统的概念 2.1.2系统动力学中系统的概念 2.2系统动力学模型结构 2.2.1反馈系统、因果关系图和反馈回路 2.2.2系统动力学流图 2.2.3系统变量 2.2.4系统动力学模型特点 2.3系统动力学建模 2.3.1系统动力学建模原则 2.4库存管理基础理论 2.4.1库存 2.4.2库存的作用 2.5库存控制理论及其模型 2.5.1库存控制 第三章系统动力学模型建立与分析 第四章模型仿真运行及结果分析 4.1系统动力学仿真设计 4.2仿真结果输出 致谢 参考文献
第一章绪论 1.1问题的提出 当今管理问题日益复杂化,促使人们认识、分析、研究、解决问题的思想方法开始从点与线的思考慢慢面向思考和系统化的思考转变。在此背景下,出现了以供应链管理(Supply Chain Management,SCM)为代表的新的管理理论与方法。供应链管理是当前管理学界研究的热点与难点问题,国际上一些著名的企业如IBM、戴尔、海尔等在供应链管理的实践中取得了巨大成就,因而受到管理学家和公司管理人员的极大的推崇。 供应链系统包括原材料供应商、制造商、分销商、零售商、最终客户等。每个组织内部又包含若干职能部门,如产品研发、生产制造、市场营销、人力资源、财务会计、物流运输等。这些职能部门可以看作是相互联系的子系统,他们之间是相互联系,相互制约的关系,而不是独立存在的。推而广之,供应链中的各个组织都具有这种交互关系。子系统与子系统之间的交互关系、系统与外部环境之间的交互关系,决定了供应链系统的复杂性、开放性、动态性和突变性。 供应链库存管理的目的就是使整个供应链系统中各个节点企业的库存波动控制在合理的范围并且使库存水平最小。库存的优化管理可以为企业带来比如减弱牛鞭效应、降低成本、加快资金周转等诸多好处,因此可以说是实现价值链增值的重要环节。但是由于供应链系统的非线性、复杂性以及动态性等特征,库存管理的科学决策很难由以往的直观经验和数学模型获得。系统动力学(System Dynamics,SD)是由美国麻省理工大学的J.W.福瑞斯特(J.W.Forrester)教授于20世纪50年代中期利用系统信息反馈理论为解决社会经济问题而开创的新学科。系统动力学可以根据系统内部各子系统的因果关系构造出具有多重反馈、非线性和时滞性的模型,并可利用计算机仿真来模拟系统的动态变化过程,分析关键因素对系统整体及其内部变量的影响。因此系统动力学方法是研究供应链库存问题行之有效的科学方法。 1.2研究的目的及意义 供应链库存管理不仅仅是一种新型的供应链库存管理模式,更是一
马匹消化系统解剖生理特点
马匹消化系统解剖生理特点 马匹消化系统的主要功能包括采食、咀嚼、吞咽、分泌、消化、吸收和排泄,其各部能相互联系,相互影响,在马匹生命活动中具有重要意义。消化系统疾病是马匹最高发疾病,发病率占到马匹内科疾病的一半以上。这与马匹消化系统解剖生理特点有关E消化系统解剖生理有以下特点: (一)马匹消化系统解剖特点 其一,马匹牙齿坚硬发达,咀嚼肌发达,有灵活的上下唇。坚硬发达的牙齿,强壮的咀嚼肌使马匹能采食、咀嚼粗硬的饲料,灵活的嘴唇使马匹采食容易。因此,马匹采金运围比较宽,从柔软的青草到坚硬的树枝、树皮、秸秆都能接受。摄人食物的多样性特别是摄入过多粗硬的食物易导致马匹出现消化不良等消化系统疾病。 其二,马匹口裂较小。马匹口裂较小导致其每一-次进食动作摄入的食量有限。因此饲喂马匹时应少量多次饲喂。 其三,马为单胃,胃容积小约为其消化道总容积的8 5%,相当于生置的人分之一至七分之一。马匹单胃,胃容积小的解创特点导致其单次进食量有限,因此,马匹要少量多次地饲喂,每次喂食量不能太多,防止胃急性胀大,发生急性胃扩张等胃部疾病。 其四,马的肠道发达,相对容积大,是马消化吸收的主要场所。马匹肠道总长度达到33米左右,总容积达到200升左右,可以容纳大量的食物,是马匹消化吸收的主要部位。 其五,马匹盲肠发达,是主要的消化器官。与人类小肠是主要的营养吸收器官不同的是,马匹小肠不是很发达。而盲肠是马的重要消化器官,素有“发酵罐”之称。育肠租结图1-2-30马胃(塑化标本)肠容积大约占肠道总容积的62%左右,寄生着大量可以分解纤维的微生物菌群,马匹食物中80%左右的纤维在结肠、直肠中完成消化吸收。 其六,马匹各段肠管内径粗细不均。马匹各段肠管内径粗细不均,尤以相邻肠管的结合部更为明显,如盲结口、回盲口、结肠起始部更细。这导致食物残渣在通过这些相邻肠管间结合部时非常容易滞留,引起肠道阻塞。所以马匹饲养管理或使役不当,非常易引起肠道阻塞或大便秘结等肠道疾病。
系统动力学自己总结)
系统动力学1.系统动力学的发展 系统动力学(简称SD—system dynamics)的出现于1956年,创始人为美国麻省理工学院的福瑞斯特教授。系统动力学是福瑞斯特教授于1958年为分析生产管理及库存管理等企业问题而提出的系统仿真方法,最初叫工业动态学。是一门分析研究信息反馈系统的学科,也是一门认识系统问题和解决系统问题的交叉综合学科。从系统方法论来说:系统动力学是结构的方法、功能的方法和历史的方法的统一。它基于系统论,吸收了控制论、信息论的精髓,是一门综合自然科学和社会科学的横向学科。 系统动力学的发展过程大致可分为三个阶段: 1)系统动力学的诞生—20世纪50-60年代 由于SD这种方法早期研究对象是以企业为中心的工业系统,初名也就叫工业动力学。这阶段主要是以福雷斯特教授在哈佛商业评论发表的《工业动力学》作为奠基之作,之后他又讲述了系统动力学的方法论和原理,系统产生动态行为的基本原理。后来,以福雷斯特教授对城市的兴衰问题进行深入的研究,提出了城市模型。 2)系统动力学发展成熟—20世纪70-80 这阶段主要的标准性成果是系统动力学世界模型与美国国家模型的研究成功。这两个模型的研究成功地解决了困扰经济学界长波问题,因此吸引了世界范围内学者的关注,促进它在世界范围内的传播与发展,确立了在社会经济问题研究中的学科地位。 3)系统动力学广泛运用与传播—20世纪90年代-至今 在这一阶段,SD在世界范围内得到广泛的传播,其应用范围更广泛,并且获得新的发展.系统动力学正加强与控制理论、系统科学、突变理论、耗散结构与分叉、结构稳定性分析、灵敏度分析、统计分析、参数估计、最优化技术应用、类属结构研究、专家系统等方面的联系。许多学者纷纷采用系统动力学方法来研究各自的社会经济问题,涉及到经济、能源、交通、环境、生态、生物、医学、工业、城市等广泛的领域。 2.系统动力学的原理 系统动力学是一门分析研究信息反馈系统的学科。它是系统科学中的一个分支,是跨越自然科学和社会科学的横向学科。系统动力学基于系统论,吸收控制论、信息论的精髓,是一门认识系统问题和解决系统问题交叉、综合性的新学科。从系统方法论来说,系统动力学的方法是结构方法、功能方法和历史方法的统一。 系统动力学是在系统论的基础上发展起来的,因此它包含着系统论的思想。系统动力学是以系统的结构决定着系统行为前提条件而展开研究的。它认为存在系统内的众多变量在它们相互作用的反馈环里有因果联系。反馈之间有系统的相互联系,构成了该系统的结构,而正是这个结构成为系统行为的根本性决定因素。
小儿消化系统解剖生理特点
小儿消化系统解剖生理特点 (一)口腔足月新生儿出生时已具有较好的吸吮吞咽功能,颊部有坚厚的脂肪垫,有助于吸吮活动,早产儿则较差。吸吮动作是复杂的先天性反射,严重疾病可影响这一反射,使吸吮变得弱而无力。新生儿及婴幼儿口腔粘膜薄嫩,血管丰富,唾液腺发育不够完善,唾液分泌少,口腔粘膜干燥,易受损伤和细菌感染;3~4个月时唾液分泌开始增加,5~6个月时明显增多。但婴儿口底浅,尚不能及时吞咽所分泌的全部唾液,因此常发生生理性流诞。 (二)食管新生儿和婴儿的食管呈漏斗状,粘膜仟弱、腺体缺乏、弹力组织及肌层尚不发达。下食管括约肌发育不成熟,控制能力差,常发生胃食管反流,绝大多数在8~10个月时症状消失。婴儿吸奶时常吞咽过多空气,易发生溢奶。 (三)胃新生儿胃容量约为30~60ml,后随年龄而增大,1~3个月时90~150ml,l岁时250~300ml,5岁时为700ml~850ml,成人约为2000ml。故年龄愈小每日喂食的次数愈多。但哺乳且不久幽门即开放,胃内容物陆续进入十二指肠,故实际胃容量不完全受上述容量限制。婴儿胃呈水平位,当开始行走时其位置变为垂直;胃平滑肌发育尚未完善,在充满液体食物后易使胃扩张;由于贲门和胃底部肌张力低,幽门括约肌发育较好,故易引起幽门痉挛出现呕吐。胃排空时间随食物种类不同而异,稠厚含凝乳块的乳汁排空慢;水的排空
时间为1.5~2小时;母乳2~3小时;牛乳3~4小时;早产儿胃排空更慢,易发生胃潴留。 (四)肠小儿肠管相对比成人长,一般为身长的5~7倍,或为坐高的10倍。小肠的主要功能包括运动(蠕动、摆动、分节运动)、消化、吸收及免疫保护。大肠的主要功能是贮存食物残渣、进一步吸收水分以及形成粪便。小肠粘膜肌层发育差,肠系膜柔软而长,结肠无明显结肠带与脂肪垂,升结肠与后壁固定差,易发生肠扭转和肠套叠。肠壁薄故通透性高,屏障功能差,肠内毒素、消化不全产物和过敏原等可经肠粘膜进入体内,引起全身感染和变态反应性疾病。由于小儿大脑皮层功能发育不完善,进食时常引起胃-结肠反射,产生便意,所以大便次数多于成人。 (五)肝年龄愈小,肝脏相对愈大。婴儿肝脏结缔组织发育较差,肝细胞再生能力强,不易发生肝硬变,但易受各种不利因素的影响,如缺氧、感染、药物中毒等均可使肝细胞发生肿胀、脂肪浸润、变性坏死、纤维增生而肿大,影响其正常功能。婴儿时期胆汁分泌较少,故对肪的消化、吸收功能较差。 (六)胰腺出生后3~4个月时胰腺发育较快,胰液分泌量也随之增多,出生后一年,胰腺外分泌部生长迅速,为出生时的3倍。胰液分泌量随年龄生长而增加,至成人每日分泌1~2升。酶类出现的顺序为:胰蛋白酶最先,而后是糜蛋白酶、羧基肽酶、脂肪酶,最后是淀粉酶。新生儿所含脂肪酶活性不高,直到2岁~3岁时才接近成
交叉口通行能力原理
原理: 交叉口的通行能力是指交叉口各相交道路入口引道通行能力之和,而每个入口引道通行能力又分为直行、右转和左转三种情况。国内常用的计算方法有两种: 1):入口引道设计通行能力为各入口引道设计通行能力之和 ①一条专用直行车道设计通行能力C s(pcu/h)计算公式: C s=3600 T c (t g?t o t i +1)σ 式中:T c---信号周期(s); t g---信号周期内的绿灯时间(s); t o---变为绿灯后第一辆车启动并通过停止线的时间(s),可采用2.3 s; t i---直行或右转车辆通过停止线的平均间隔时间(s/pcu); σ---直行车道通行能力折减系数,可采用0.9. ②一条直右车道设计通行能力C sr(pcu/h)计算公式: C sr=C s ③一条直左车道设计通行能力计算公式: C sl=C s(1-β1′/2) 式中:β1′---直左车道中左转车所占比例(%); ④一条直左右车道设计通行能力计算公式: C slr=C sl 2)停车线法 该计算方法由北京市政设计院提出。它是以入口引道的停车线作为基准面,认为凡是通过该面的车辆就已经通过交叉线,所以称为停车线法。其计算方法如下: ①一条专用直行车道的通行能力 N 直=3600 T 周 × t 绿 ?t 损 t 间
式中:T 周---信号灯周期时间,一般取用60-90s ,亦有用到120s ; t 绿---每一个周期内的绿灯时间,在周期时间确定后,可按两 相交道路的入口引道上交通量之比确定绿灯与红灯时间之比; t 损---一个周期内的绿灯损失时间,包括起动、加速时间,通常在绿灯前的黄灯时间已做好准备,待绿灯一亮即可开动,故一般只记加速时间损失而不计反应和启动的时间损失,而加速时间损失可用t 加= v 2a 计算; 其中:v ---直行车辆通过交叉口的车速(m/s ); a ---平均加速度m/s 2,根据实际观察:小汽车a =0.6-0.7m/s 2, 中型卡车a =0.5-0.6m/s 2,大型车a =0.4-0.5m/s 2; t 间---前后两车接连通过停车线的平均间隔时间,对于单纯的小汽车车流平均为2.5s ,大型车平均为3.5s ,铰接车平均为7.5s. ②一条右转专用车道的通行能力 N 右=3600t 右(辆/h ) t 右---前后两右转车辆连续驶过停车线断面的间隔时间,根据观测大、小车各占一半时平均值约为4.5s ,单纯为小车时其平均值为3-3.6s. ③一条左转专用车道的通行能力 N 左=3600T 周×n (辆/h ) n =t 黄绿 ?V 左2a t 左 式中:n ---在一个周期内允许左转弯的车辆数; t 黄绿---一个周期内专门用于通过左转车黄绿灯的时间; V 左---左转车辆的行驶车速(m/s ); a---左转车的平均加速度m/s 2; t 左---左转车通过停车线的车头时距(s )。
系统动力学方法-名词
系统动力学方法 系统动力学方法是一种以反馈控制理论为基础,以计算机仿真技术为手段,通常用以研究复杂的社会经济系统的定量方法。自50年代中美国麻省理工学院地的福雷斯特教授创立以来,它已成功地尖用于企业、城市、地区、国家甚至世界规模的许多战略与决策等分析中,被誉为"战略与决策实验室"。这种模型从本质上看是带时间滞后的一阶差微分方程,由于建模时借助于"流图",其中"积累"、"流率"和其它辅助变量都具有明显的物理意义,因此可以说是一种布告同实际的建模方法。它与其它模型方法相比,具有下列特点: (1)适用于处理长期性和周期性的问题。如自然界的生态平衡、人的生命周期和社会问题中的经济危机等都呈现周期性规律并需通过较长的历史阶段来观察,已有不少系统动力学模型对其机制作出了较为科学的解释。 (2)适用于对数据不足的问题进行研究。建模中常常遇到数据不足或某些数据难于量化的问题,系统动力学藉各要素间的因果关系及有限的数据及一定的结构仍可进行推算分析。 (3)适用于处理精度要求不高的复杂的社会经济问题。上述总是常因描述方程是高阶非线性动态的,应用一般数学方法很难求解。系统动力学则藉助于计算机及仿真技术仍能获得主要信息。 (4)强调有条件预测。本方法强调产生结果的条件,采?quot;如果……则"的形式,对预测未来提供了新的手段。 系统动力学的基本概念包括: (1)因果反馈。如果事件A(原因)引起事件B(结果),AB简便形成因果关系。若A增加引起B增加,称AB构成正因果关系;若A啬引起B减少,则负因果关系。两个以上因果关系链首尾相连构成反馈回路,亦分正、负反馈回路。 (2)积累。本法视社会经济状态变化为由许多参变量组成的一种流,通过对流的研究来掌握系统性质和运动规律。流的规程量便是"积累",用以描述系统状态,系统输入输出流量之差为积累增量。"流率"表述流的活动状态,亦称决策函数,积累则是流的结果。任何决策过程均可用流的反馈回路描述。 (3)流图。流图由"积累"、"流率"、"物质流"、"信息流"等符号构成,直观形象地反映系统结构和动态特征。 某库存系统的流图如图16-8。图中,库存量(L)和劳力(A)为积累变量, 产出率(R 1),发货率(R 2 ),雇用率(R 3 )为流速变量。可以根据流图写出系 统动力学方程。 如:积累(L)公式为:L=L 0+(R 1 -R 2 )△t
城市道路交叉口与路段通行能力计算方法与公式
计算说明 、路段通行能力与饱和度的计算说明 1、通行能力计算 计算路段单方向的通行能力,如“由东向西的通行能力” 能力” 0 C 单 路段单向通行能力; C i ――第i 条车道的通行能力; i —— 车道编号,从道路中心至道路边缘依次编号; n ——路段单向车道数。 C i C 0 条 交 车道 C o ―― 1条车道的理论通行能力,根据道路设计速度取表 1-1中对应的建 议值: 表1-1 C o 值 条 —— 车道折减系数,自中心线起第一条车道的折减系数为 1.00,第二 条车道的折减系数为 0.80?0.89,第三条为0.65?0.78,第四条为0.50?0.65, 第五条以上为0.40?0.52; 交 —— 交叉口折减系数,根据道路设计速度和路段两交叉口之间的距离 由表1-2确定: 单— C i 1 (1-1) 由南向北的通行 (1-2 ) __滋犍馳计规范漣询-辭道理论通行 逋it 对城市逍觥和连壯菇豁下卄
表1-2交叉口折减系数 车道一一车道宽度折减系数,根据车道宽度由表 1-3确定: 表1-3车道折减系数 2、饱和度计算 V/C ――实际流量除以通行能力 、交叉口通行能力与饱和度计算说明 1、通行能力计算 n C 交叉口 = C i (2-1) i1 C 交叉口 交叉口通行能力; C i —— 交叉口各进口的通行能力; i —— 交叉口进口编号; n —— 交叉口进口数,n 为4或3。 K
(2-2) G= C j j1 C j——进口各车道的通行能力; 车道编号; j—— K——进口车道数。 先计算各个车道的通行能力,再计算各个进口的通行能力,然后计算整个交叉口的通行能力。 用专用工具计算进口各车道通行能力,按直行、直左、直右、直左右、专左、专右的先后顺序。 (1 ) 直行、直左、直右与直左右车道的通行能力计算:需要输入的数据: ①信号周期T; ②对应相位的绿灯时间t ; ③对应相位的有效绿灯时间t j ; ④对应的车流量。 、、+ : 、,I ? 注意:
汽车系统动力学复习资料1
研究内容与评价指标 1、纵向动力学 2、垂向(行驶)动力学 3、横向(操纵)动力学 动力性、燃油经济性,安全性:制动、驱动、操纵稳定性、被动安全性,舒适性:平顺性、NVH,机动性:通过能力,可靠性、耐久性 主要内容 绪论: 基础知识:轮胎力学 纵向动力学:动力性、经济性、制动性 垂向动力学:平顺性 侧向动力学:操纵稳定性 车辆计算机仿真: 章节主要内容-1:概述 1、汽车动力学概述 系统动力学概述、历史回顾、研究内容和范围、汽车特性和设计方法、汽车动力学术语、标准和法规、汽车动力学发展趋势 2、汽车动力学建模方法 动力学方程的建立方法、非完整系统动力学、多体系统动力学方法 章节主要内容-2:汽车空气动力学基础 汽车空气动力学基础、空气的特性、伯努利方程、压力分布和压力系数、实际气流特性、空气动力学试验、汽车空气阻力章节主要内容-3:汽车纵向动力学 汽车纵向动力学 纵向动力学控制系统 防抱死制动系统、驱动力控制系统、车辆稳定性控制系统 动力传动系统的振动分析 扭振系统的激振源、扭振系统模型与分析、动力传动系统的减震措施 章节主要内容-4:轮胎动力学+操纵 5、充气轮胎动力学 轮胎的功效、结构与发展、轮胎模型、轮胎纵向力学特性、轮胎垂向力学特性、轮胎侧向力学特性、汽车横向动力学、二自由度操纵模型 6、考虑车身侧倾的3自由度运动模型 转向系统振动分析、轮转向系统、电动助力转向系统 章节主要内容-5:垂向动力学 7、汽车垂向动力学 路面输入及其模型、路面测量技术与数据处理、路面输入模型、特殊路面输入、人体对振动的反应与平顺性标准、汽车振动模型 8、智能悬架系统 车身高度调节系统、自适应阻尼调节系统、可切换阻尼系统、全主动系统、有限带宽主动系统、连续可变阻尼的半主动悬架、各类悬架系统的性能比较、主动悬架控制算法介绍 章节主要内容-7:动力学分析方法 9、计算机建模与仿真 汽车动力学计算方法与软件、基于MA TLAB 的汽车动力学仿真、应用ADAMS 软件的多体动力学分析 历史回顾 车辆动力学是近代发展的新兴学科,大体分以下阶段: 阶段一(1900——20世纪年代初期):最早有关车辆行驶振动分析 阶段二(30年代初期——1952年):简单的轮胎力学,建立了简单的两自由度操纵动力学方程; 阶段三(1952年以后):对轮胎侧向动力学、独立悬架等有了新的认识 阶段四(90年代以后):新技术与计算机技术提高,使车辆动力学出现了百花齐放的局面 阶段一(19--20世纪30年代初) 主要工作: 最早的有关车辆行驶振动分析的理论研究可追溯到1900年。20世纪20年代,人们对车辆行驶中的振动问题开始有了一些初步的了解;对于车辆动态性能经验性观察,注意到车轮摆振问题;认识到乘坐舒适性是车辆性能的一个重要方面;零星出现了提高车辆行驶性能的方法,但效果微小。 阶段二(30年代初--1952年)