基于自抗扰控制的制导与运动控制一体化设计_赵春哲
运动控制卡设计步骤
运动控制卡开发四步曲 1使用黑金开发板实现脉冲控制的运动控制卡 运动控制器第一步:实现简单脉冲控制系统 方式、 占空比 可编程 脉冲输 出 1.1使用Quartus II软件建立SOPC工程,按照上图建立添加所需CPU及外设。 1.2使用Nios II建立UC-OS-II工程。 1.3在UC-OS-II中建立一个任务,用于收发以太网数据,跟上位机通讯。 1.4在Quartus II中加入编码器解析模块,将来自编码器的AB信号转化成位置和速度,并支持总线读写,最高编码器脉冲频率20M。 1.5在Quartus II中加入脉冲输出模块,实现CPU发出的脉冲速度和脉冲数,最高输出脉冲频率8M。 1.6在Nios II中规划速度曲线,周期200us输出一个脉冲速度。 1.7连接驱动器和电机进行调试。 1.8加入缓冲控制。 1.9加入高速捕获功能。 1.10加入回零功能。
2使用DSP开发板+黑金开发板实现脉冲控制的运动控制卡 运动控制器第二步:DSP+FPGA脉冲控制系统 方式、 占空比 可编程 脉冲输 出 电压保护 2.1在第一步的系统中,增加与DSP通信的模块。 2.2Nios II中接收到上位运动指令之后,发出中断信号给DSP,DSP读取运动数据。 2.3DSP读取位置信号,规划出速度曲线输出到FPGA输出脉冲。 3. 连接驱动器和电机进行调试。 3使用DSP开发板+黑金开发板实现速度控制的运动控制卡
运动控制器第三步:DSP+FPGA 速度控制系统 8路模 拟量输出 3.1在第二步的基础上,在DSP 中增加位置环调节算法,输出速度曲线到FPGA ,FPGA 控制DA 输出模拟量。 3.2连接驱动器和电机进行调试。 4实现速度控+脉冲制的运动控制卡 电压保护 运动控制器第四步:DSP+FPGA 速度控制运动控制器 8路模 拟量输出 16方式、占空比可编程脉冲输出 线驱动器
2013硕士研究生培养方案——导航制导与控制
浙江大学硕士研究生培养方案(2011级) 航空航天学院导航、制导与控制专业(代码:081105) (一级学科:控制科学与工程) 一、培养目标: 在本学科掌握坚实的理论基础和系统的专门知识,了解学科的发展方向及学术动态,能够理论联系实际,具有创新意识和解决问题的能力,具有独立从事科研工作和担负专门技术工作的能力。 二、学制: 2.5年 三、主要研究方向: 1、非线性控制 2、自适应/鲁棒/预测控制 3、智能控制与智能系统 4、飞行动力学系统建模及控制 5、故障诊断与容错控制 6、空天飞行器航迹优化 7、信号处理与多传感器数据融合 8、嵌入式控制系统 四、课程学习要求: 课程最低总学分26学分,其中公共学位课5学分,专业学位课10学分,选修课9学分,读书报告2学分。其中本专业硕士选修课至少5学分。 五、培养环节要求: 1、读书报告: (同学校要求)要求每位硕士研究生在学期间做读书报告或seminar 4次,其中至少公开在学科或学院的学术论坛做读书报告1次。完成累计4次计2学分。 2、开题报告: (同学校要求)硕士研究生应填写规定格式的开题报告,就论文选题意义、主要研究内容和研究方案等作出论证,经导师(组)审定通过后,开始撰写学位论文。硕士研究生学位论文开题报告一般应在入学后第1学年末完成。 3、科研成果: (遵照浙江大学信息学院、控制学科学位委员会以及控制系教授会拟订的决议或标准执行,三者不统一时,采取就高原则。) 硕士研究生在学期间应至少取得以下科研成果之一: 1)在A类期刊正刊、国际SCI/EI学术刊物(不含会议论文)上发表或录用与学位论文主题相关的学术论文一篇以上(含一篇); 2)在学术会议上发表与学位论文主题相关的学术论文,并且该论文已经被SCI/EI/ISTP 检索; 3)申报与学位论文主题相关的发明专利一项以上(含一项),并取得正式专利受理号; 4)研究生在学期间获得的其他成果按浙大发研[2002]16号文件有关规定计算。 以上研究成果均须以浙江大学为第一署名单位,研究生为学生中排名第一完成人。
模型参考自适应控制
10.自适应控制 严格地说,实际过程中的控制对象自身及能所处的环境都是十分复杂的,其参数会由于种种外部与内部的原因而发生变化。如,化学反应过程中的参数随环境温度和湿度的变化而变化(外部原因),化学反应速度随催化剂活性的衰减而变慢(内部原因),等等。如果实际控制对象客观存在着较强的不确定,那么,前面所述的一些基于确定性模型参数来设计控制系统的方法是不适用的。 所谓自适应控制是对于系统无法预知的变化,能自动地不断使系统保持所希望的状态。因此,一个自适应控制系统,应能在其运行过程中,通过不断地测取系统的输入、状态、输出或性能参数,逐渐地了解和掌握对象,然后根据所获得的过程信息,按一定的设计方法,作出控制决策去修正控制器的结构,参数或控制作用,以便在某种意义下,使控制效果达到最优或近似更优。目前比较成熟的自适应控制可分为两大类:模型参考自适应控制(Model Reference Adaptive Control)和自校正控制(Self-Turning)。 10.1模型参考自适应控制 10.1.1模型参考自适应控制原理 模型参考自适应控制系统的基本结构与图10.1所示: 10.1模型参考自适应控制系统 它由两个环路组成,由控制器和受控对象组成内环,这一部分称之为可调系统,由参考模型和自适应机构组成外环。实际上,该系统是在常规的反馈控制回路上再附加一个参考模型和控制器参数的自动调节回路而形成。
在该系统中,参考模型的输出或状态相当于给定一个动态性能指标,(通常,参考模型是一个响应比较好的模型),目标信号同时加在可调系统与参考模型上,通过比较受控对象与参考模型的输出或状态来得到两者之间的误差信息,按照一定的规律(自适应律)来修正控制器的参数(参数自适应)或产生一个辅助输入信号(信号综合自适应),从而使受控制对象的输出尽可能地跟随参考模型的输出。 在这个系统,当受控制对象由于外界或自身的原因系统的特性发生变化时,将导致受控对象输出与参考模型输出间误差的增大。于是,系统的自适应机构再次发生作用调整控制器的参数,使得受控对象的输出再一次趋近于参考模型的输出(即与理想的希望输出相一致)。这就是参考模型自适应控制的基本工作原理。 模型参考自适应控制设计的核心问题是怎样决定和综合自适应律,有两类方法,一类为参数最优化方法,即利用优化方法寻找一组控制器的最优参数,使与系统有关的某个评价目标,如:J=? t o e 2(t)dt ,达到最小。另一类方法是基于稳 定性理论的方法,其基本思想是保证控制器参数自适应调节过程是稳定的。如基于Lyapunov 稳定性理论的设计方法和基于Popov 超稳定理论的方法。 系统设计举例 以下通过一个设计举例说明参数最优化设计方法的具体应用。 例10.1设一受控系统的开环传递函数为W a (s)=) 1(+s s k ,其中K 可变,要求 用一参考模型自适应控制使系统得到较好的输出。 解:对于该系统,我们选其控制器为PID 控制器,而PID 控制器的参数由自适应机构来调节,参考模型选性能综合指标良好的一个二阶系统: W m (d)= 1 414.11 2 ++s s 自适应津决定的评价函数取 minJ =?t e 2 (t)dt ,e(t)为参考模型输出与对象输出的误差。 由于评价函数不能写成PID 参数的解析函数形式,因此选用单纯形法做为寻优方法。(参见有关优化设计参考文献)。 在上述分析及考虑下,可将系统表示具体结构表示如下图10.2所示。
运动控制系统课程设计报告
《运动控制系统》课程设计报告 时间2014.10 _ 学院自动化 _ 专业班级自1103 _ 姓名曹俊博__ 学号 指导教师潘月斗 ___ 成绩 _______
摘要 本课程设计从直流电动机原理入手,建立V-M双闭环直流调速系统,设计双闭环直流调速系统的ACR和ASR结构,其中主回路采用晶闸管三相桥式全控整流电路供电,触发器采用KJ004触发电路,系统无静差;符合电流超调量σi≤5%;空载启动到额定转速超调量σn≤10%。并详细分析系统各部分原理及其静态和动态性能,且利用Simulink对系统进行各种参数给定下的仿真。 关键词:双闭环;直流调速;无静差;仿真 Abstract This course is designed from DC motor, establish the principles of V-M double closed loop DC speed control system design, the double closed loop dc speed control system and the structure, including ACR ASR the main loop thyristor three-phase bridge type all control the power supply and trigger the rectifier circuit KJ004 trigger circuit, the system without the static poor; Accord with current overshoots sigma I 5% or less; No-load start to the rated speed overshoot sigma n 10% or less. And detailed analysis of the system principle and the static and dynamic performance, and the system of simulink to various parameters set simulation. Key Words:double closed loop;DC speed control system;without the static poor;simulation
航天器制导与控制课后题答案(西电)
航天器制导与控制课后题答案(西电) 1.3 航天器的基本系统组成及各部分作用? 航天器基本系统一般分为有效载荷和保障系统两大类。有效载荷:用于直接完成特定的航天飞行任务的部件、仪器或分系统。保障系统:用于保障航天器从火箭起飞到工作寿命终止, 星上所有分系统的正 常工作。 1.4 航天器轨道和姿态控制的概念、内容和相互关系各是什么? 概念:轨道控制:对航天器的质心施以外力, 以有目的地改变其运动轨迹的技术; 姿态控制:对航天器绕质心施加力矩, 以保持或按需要改变其在空间的定向的技术。内容:轨道控制包括轨道确定和轨道控制两方面的内容。轨道确定的任务是研究如何确定航天器的位置和速度, 有时也称为空间导航, 简称导航; 轨道控制是根据航天器现有位置、速度、飞行的最终目标, 对质心施以控制力, 以改变其运动轨迹的技术, 有时也称为制导。姿态控制包括姿态确定和姿态控制两方面内容。姿态确定是研究航天器相对于某个基准的确定姿态方法。姿态控制是航天器在规定或预先确定的方向( 可称为参考方向)上定向的过程, 它包括姿态稳定和姿态机动。姿态稳定是指使姿态保持在指定方向, 而姿态机动是指航天器从一个姿态过渡到另一个姿态的 再定向过程。关系:轨道控制与姿态控制密切相关。为实现轨道控制, 航天器姿态必须符合要求。也就是说, 当需要对航天器进行轨道控制时, 同时也要求进行姿态控制。在某些具体情况或某些飞行过程中,
可以把姿态控制和轨道控制分开来考虑。某些应用任务对航天器的轨道没有严格要求, 而对航天器的姿态却有要求。 1.5 阐述姿态稳定的各种方式, 比较其异同。 姿态稳定是保持已有姿态的控制, 航天器姿态稳定方式按航天 器姿态运动的形式可大致分为两类。自旋稳定:卫星等航天器绕其一轴(自旋轴) 旋转, 依靠旋转动量矩保持自旋轴在惯性空间的指向。自旋稳定常辅以主动姿态控制, 来修正自旋轴指向误差。三轴稳定: 依靠主动姿态控制或利用环境力矩, 保持航天器本体三条正交轴线在 某一参考空间的方向。 1.6主动控制与被动控制的主要区别是什么? 画出星—地大回路控制的结构图。 主动控制与被动控制的主要区别是航天器的控制力和力矩的来 源不同。被动控制: 其控制力或力矩由空间环境和航天器动力学特性提供, 不需要消耗星上能源。例如利用气动力或力矩、太阳辐射压力、重力梯度力矩,磁力矩等实现轨道或姿态的被动控制, 而不消耗工质或电能。主动控制: 包括测量航天器的姿态和轨道, 处理测量数据, 按照一定的控制规律产生控制指令, 并执行指令产生对航天器的控 制力或力矩。需要消耗电能或工质等星上能源, 由星载或地面设备组成闭环系统来实现。 2.1 利用牛顿万有引力定律推导、分析航天器受N 体引力时的运动方程, 并阐述简化为二体相对运动的合理性。 (1)解:牛顿万有引力定律:??r Fg??GMm
基于DSC和FP GA的运动控制卡设计
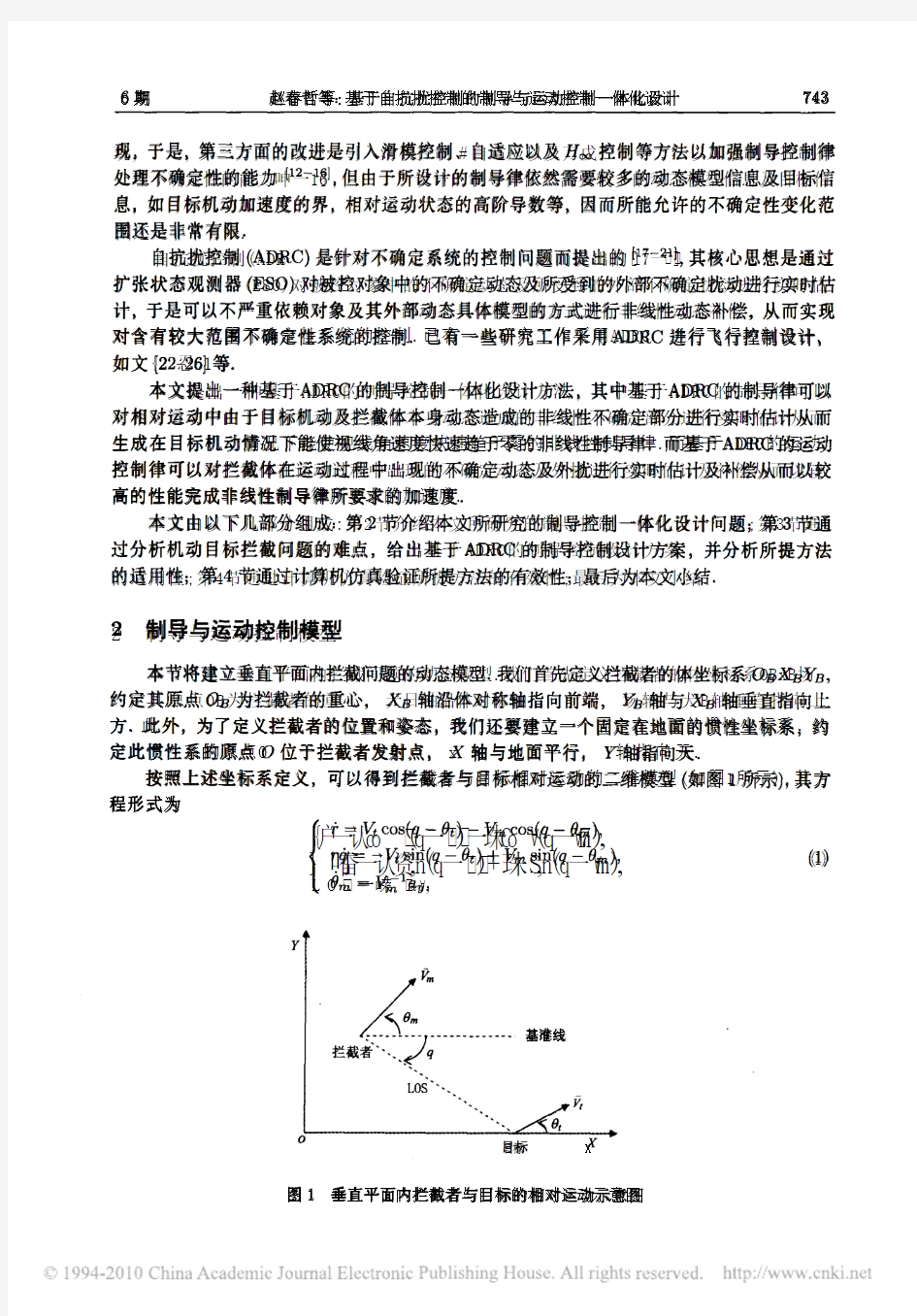
2016年1月第44卷第2期机床与液压MACHINETOOL&HYDRAULICSJan 2016Vol 44No 2DOI:10.3969/j issn 1001-3881 2016 02 048 收稿日期:2014-11-03 作者简介:张从鹏(1975 ),男,博士,副教授,研究方向为数字化制造技术与装备三E-mail:soaringroc@ncut edu cn三基于DSC和FPGA的运动控制卡设计 张从鹏,刘同,赵康康 (北方工业大学机电工程学院,北京100144) 摘要:针对四轴运动控制卡进行研究,设计了一种基于数字信号控制器DSC和FPGA双核架构的四轴数字量和模拟量运动控制卡;开发了数字脉冲输出模块二模拟量模块二标志位模块二编码器接收模块及接口电路等硬件;基于开发的硬件系统,实现了运动控制粗精两级插补算法,粗插补采用数据采样算法,精插补采用数字积分法,完成了控制卡软硬件调试三实验结果表明:控制卡实现了步进电机和伺服电机的多轴精确位置控制,性能稳定,可以满足多数工业场合应用三 关键词:四轴运动控制卡;DSC;FPGA;插补算法 中图分类号:TP23一一文献标志码:B一一文章编号:1001-3881(2016)2-156-3 DesignofMotionControllerBasedonDSCandFPGA ZHANGCongpeng,LIUTong,ZHAOKangkang(CollegeofMechanicalandElectricalEngineering,NorthChinaUniversityofTechnology,Beijing100144,China)Abstract:Afour?axisdigitalandanalogmotioncontrollerbasedondigitalsignalcontroller(DSC)andFPGAwasdesigned,in?cludingdigitalpulseoutputmodule,analogmodule,flagmodule,encoderreceivermoduleandinterfacecircuit.Basedonthedevel?opedhardware,coarseandfinetwointerpolationalgorithmwasrealized.Sample?datawaschosenascoarseinterpolation,digitaldiffer?entialanalyzerwaschosenasfineinterpolation.Thecontrolcardhardwareandsoftwaredebuggingwerealsocompleted.Theexperimen?talresultsshowthat:thecontrolcardisusedtorealizemulti?axisprecisepositioncontroltostepper/servomotor,itcanmeetmostin?dustrialapplications. Keywords:Four?axismotioncontroller;Digitalsignalcontroller(DSC);Fieldprogrammablegatearray(FPGA);Interpola?tionalgorithm一一运动控制卡作为运动控制系统中的核心数据处理部件,是高性能运动控制的重要部件,对其性能的要 求也越来越高三目前工业上应用的运动控制卡多采用DSP或x86芯片作为主处理器,依靠其强大的数据处理能力实现系统管理和数据插补,造价高昂,运动控 制的实时性得不到保障[1]三随着微电子技术的发展,以STM32F4为代表的新一代处理器数字信号控制器(DSC)应运而生三DSC是一种集微控制器(MCU)和数字信号处理器(DSP)专长于一身的新型处理 器,既集成了DSP处理器的实时硬件算法,又具有MCU接口丰富的优点,系统功耗低,十分适合电机控制二电源转换和传感器处理等领域[2-3]三作者面向工业应用,基于DSC+FPGA硬件架构,采用DSC处理器STM32F407ZGT6和FPGA芯片EP4CE10F17C8N 设计新型运动控制卡,粗精两级插补实现运动控制, 具有一定的现实意义三 1一运动控制卡结构 运动控制卡采用DSC+FPGA双核心结构,利用 了DSC的控制器接口资源丰富和FPGA硬件可编程 及并行处理特点三DSC负责接口二通信二数控粗插补二系统管理等功能,其上连接RS232接口二以太网接口二USB接口二FLASH二EEPROM等存储芯片等三FPGA负责数控精插补模块二运动控制接口模块,其中包括:脉冲接口,编码器接口,I/O接口,标志位及手轮接口等5个接口功能三运动控制卡硬件结构如图1所示 三 图1一运动控制卡的基本结构
基于运动控制卡的控制系统的设计与实现 Design and implementation
基金颁发部门:国家自然科学基金委;项目名称:宽谱XCT 的投影数据模拟以及投影数据校正方法的研究;编号:60551003;基金申请人:牟轩沁,邓振生; 备注:本论文是基金项目中仪器设备研究科目:"控制X线机双能量曝光的控制设备"的控制方法研究之一。 基于运动控制卡的控制系统的设计与实现 Design and implementation of motion control system based on motion control card 柳叶青1,*邓振生1,陈真诚1,牟轩沁2 LIU Ye-qing1, DENG Zhen-sheng, CHEN Zhen-cheng, MOU Xuan-qin2 (1.中南大学信息物理工程学院生物医学工程研究所,湖南 长沙 410083; 2.西安交通大学电子与信息工程学院图像处理与模式识别研究所,陕西 西安 710049) (1.Institute of Biomedical Engineering, School of Info-Physic and Geomatic Engineering, Central South University, Changsha, Hunan, 410083, China; 2. Institute of Image Processing and Pattern Recognition, The School of Electronic and Information Engineering, Xi'an Jiaotong University, Xi'an, Shanxi, 710049, China)摘 要:本文介绍了一个基于多轴运动控制卡的运动控制系统。该系统以工控计算机、通用操作系统、PCI-8134多轴运动控制卡及其功能库函数为平台,采用VC++开发的人机界面,实现了三轴(X,Y,Z轴)独立运动、各个轴的连续直线运动以及梯形加减速运动等功能。 关键词:PCI-8134运动控制卡;运动控制;VC++ Abstract: In this article, a motion control system based on control card of multi-axis movement was introduced. It is grounded on the industrial computer, the common operation system; a multi-axis motion control card, PCI-8134, and its movement function library, the interface in VC++ Language can be programmed in order to implement the control. The motion control functions include the movement of three axes separately; continuous linear movement and T-curve acceleration/deceleration movement of each axes, etc. Key words: motion control card PCI-8134, motion control, VC++ 0 引言 运动控制技术的发展是推动新的产业革命的关键技术。传统的数字运动控制装置一般直接采用微机或单片机来实现位置控制,外围电路复杂,计算速度慢。近年来,对运动控制系统的速度和精度的要求愈来愈高,使得传统的运动控制系统难以取得满意的控制效果,因此急需一种运算速度快、可以满足高精度运动控制的。随着技术的成熟稳定,目前市场上出现了种类繁多的运动控制卡。 本研究利用基于PCI总线的PCI-8134多轴运动控制卡及其功能库函数、工控计算机,设计了可控制多轴的步进电机、按照编程预定的运动轨迹及运动参数作定位运动的控制系统。本系统具有通用性,可方便地移植到各种运动控制系统的开发中去,例如机器人、雕刻机及专用数控机床的开发等。 1 基于运动控制卡的运动控制系统实现原理 运动控制卡通常采用专业运动控制芯片或高速DSP作为运动控制核心,大多用于控制步进电机或伺服电机。运动控制卡与PC机构成主从式控制结构:PC 机负责人机交互界面的管理和控制系统的实时监控等方面的工作,例如键盘和鼠标的管理、系统状态的显示、运动轨迹规划、控制指令的发送、外部信号的监控等等;控制卡完成运动控制的所有细节,包括脉冲和方向信号的输出、自动升降速的处理、原点和限位等信号的检测等。 运动控制卡通过板卡接口输出PC机运算结果的运动控制脉冲数和运动方向控制等信号,经过伺服驱动功率放大器放大后,驱动步进电机或交流数字伺服电机转动,再通过滚珠丝杠传动机械,驱动两轴或三轴精密十字工作台运动。对于运动目标位置控制通常有两种模式:一种模式是采用步进电机驱动的开环控制系统模式,另一种是采用交流数字伺服电机驱动闭 * 本文通讯作者:邓振生
基于+PLC+的两轴运动控制系统设计
基于 PLC 的两轴运动控制系统设计 学生姓名:张坤森 学号:2014062038 指导教师;彭宽栋 专业:机电一体化 杭州科技职业技术学院 摘要:以可编程控制器 PLC 作为运动控制系统的核心,步进电机作为运动控制系统的执行机构,设计了基于 PLC 的两轴运动控制系统;通过 PLC 高速脉冲口输出高速脉冲,实现了单轴运动或者两轴运动;采用触摸屏作为操作面板,建立了友好的人机交互界面。 关键词:机械制造自动化; PLC;步进电机;运动控制 0 前言 步进电机是一种将电脉冲转化为角位移的执行机构。步进电机开环控制结构简单,可靠性高,价格低。但当起动频率太高或者负载太大,步进电机极易失步。而步进电机闭环控制可以克服以上缺点,提高系统精度和稳定性。在闭环控制系统中,采用增量式编码器作为反馈装置。而 PLC 作为一种工业计算机,具有逻辑控制、步进控制、数据处理、存储功能、自诊断功能、通信联网等功能,而且具有较高的可靠性、较强的抗干扰性、较好的通用性等优点。所以,使用 PLC 控制步进电机,构建两轴运动控制系统,具有重要意义。 1 系统组成 本文所实现的示教与再现功能系统组成框图如图1所示。采用西门
子 S 7-200系列的 C P U226 D C/D C /D CP L C作为主控制器。该 C P U具有 4个最高 20k H z的正交高速脉冲计数器 ,能够对输入的正交编码脉冲信号进行 4分频 [ 5] ; 2个最高 20k Hz 的高速脉冲输出 ;24个输入点和 16个输出点 ; 其布尔型指令执行时间只有 0. 22μ s [ 6] 。 2 系统总体设计 该运动控制系统由触摸屏、 PLC、步进电机驱动器、步进电机、限位开关、急停开关、编码器等组成。操作者通过触摸屏端操作,向PLC 发出控制指令,PLC 根据控制指令和内部梯形图控制相应步进电机动作,步进电机将带动相应的进给轴动作,同时,PLC 将采集与步进电机相连的编码器产生的反馈信号,并将反馈信号返回给触摸屏,以完成整个系统的反馈环节。此外,外部限位开关用于限定运动系统的极限位置,急停开关用于发生突发状况时,立即停止机器,防止伤害或者损失扩大。系统总体设计框图如图 1
制导与控制系统原理
1.角度鉴别力:是制导系统对同一距离上,不同方位的两个目标的 分辨能力,一般用能够分辨出的两个目标与控制点连线间的最小夹角Δφ表示。 2.红外成像制导系统:红外成像制导系统利用红外探测器探测目标 的红外辐射,获取红外图像进行目标捕获与跟踪,并将导弹引向目标,它探测的是目标和背景间微小的温差或辐射频率差引起的热辐射分布图像。 3.理想弹道:如导弹的外形及参数是理想的,发动机的推力是额定 的,控制系统(包括导弹本身)既无惯性有无延迟,大气条件符合标准,目标特性也是确定的,则按给定初始条件计算出的弹道称为理想弹道。 4.遥控指令制导:遥控指令制导是从制导站向导弹发出引导指令信 号,送给弹上控制系统,把导弹引向目标的一种遥控控制导方式。 特点:制导设备分为制导站引导设备和弹上控制设备两部分。制导站设备有目标、导弹观测跟踪装置,指令形成装置,指令发射装置等。弹上设备包括指令接收装置,弹上控制系统。根据指令传输形式的不同,遥控指令制导分为有线指令制导和无线电指令制导两类。 5.攻角 :速度向量vd在弹体纵向对称平面的投影与弹体纵轴间的 夹角称为攻角,弹体纵轴在速度向量投影上方时,攻角为正。6.比例导引法:保持导弹速度矢量转动角速度与目标视线转动的角 速度成一定比例的引导方法,叫比例导引法。
7.串联复合制导:串联复合制导就是在导弹飞行弹道的不同段上, 采用不同的制导方法。 8.导弹的动态特性:导弹的动态特性,就是指偏转舵面或导弹受扰 动时导弹运动的动力学特性,通常是指没有控制系统作用时,导弹的稳定性和操纵性。 9.测角仪:测角仪是具有测量坐标系并可用来测定空间运动体(目 标或导弹)在该坐标系中所处位置的仪器,它的输入量为被测量的目标(导弹)坐标变化的信息,它将输入量与测量坐标系的基准信息进行比较,并产生误差信号,经放大与转换之后,生成与角误差信号相对应的电信号。 10.并联复合制导:并联复合制导就是在导弹的整个飞行过程中,或 者在弹道的某一段上,同时采用几种制导方式。 11.制导系统的基本任务是确定导弹与目标的相对位置,操纵导弹飞 行,在一定的准确度下,引导导弹沿预定的弹道飞向目标。 12.从功能上可将制导系统分为引导系统和控制系统两部分。 13.自寻的制导系统:自动导引系统也称为自寻的制导系统,是利用 目标辐射或反射的能量制导导弹去攻击目标。自寻的制导系统可分成主动式、半主动式和被动式三种。 14.遥控制导系统:由导弹以外的制导站向导弹发出引导信息的制导 系统,称为遥控制导系统。 15.天文导航是根据导弹、地球、星体三者之间的运动关系,来确定 导弹的运动参量,将导弹的运动参量,将导弹引向目标的一种制
基于VC++的运动控制卡软件系统设计
基于VC++的运动控制卡软件系统设计 在自动控制领域,基于PC和运动控制卡的伺服系统正演绎着一场工业自动化的革命。目前,常用的多轴控制系统主要分为3大块:基于PLC的多轴定位控制系统,基于PC_based的多轴控制系统和基于总线的多轴控制系统。由于PC 机在各种工业现场的广泛运动,先进控制理论和DSP技术实现手段的并行发展,各种工业设备的研制和改造中急需一个运动控制模块的硬件平台,以及为了满足新型数控系统的标准化、柔性化、开放性等要求,使得基于PC和运动控制卡的伺服系统备受青睐。本文主要是利用VC++6.0提供的MFC应用程序开发平台探索研究平面2-DOF四分之过驱动并联机构的运动控制系统的软件开发。 平面2-DOF四分之过驱动并联机构的控制系统组成 并联机构的本体如图1,该机构由4个分支链组成,每条支链的一段与驱动电动机相连,而另一端相交于同一点。该并联机构的操作末端有2个自由度(即X 方向和Y方向的平动),驱动输入数目为4,从而组成过驱动并联机构。 控制系统的硬件主要有4部分组成:PC机,四轴运动控制卡,伺服驱动器和直流电动机。系统选用的是普通PC机,固高公司的GT-400-SV-PCI运动控制卡,瑞士Maxon公司的四象限直流伺服驱动器及直流永磁电动机。伺服驱动器型号为4-Q-DCADS50/5,与驱动器适配直流电动机型号为Maxon RE-35。运动控制系统的
构成如图2所示。上位控制单元由PC机和运动控制卡一起组成,板卡插在PC机主板上的PCI插槽内。PC机主要负责信息流和数据流的管理,以及从运动控制卡读取位置数据,并经过计算后将控制指令发给运动控制卡。驱动器控制模式采用编码器速度控制,驱动器接受到运动控制卡发出的模拟电压,通过内部的PWM电路控制直流电动机RE-35的运转,并接受直流电动机RE-35上的编码器反馈信号调整对电动机的控制,如此构成一个半闭环的直流伺服控制系统。 1.1 GT-400-SV控制卡介绍 固高公司生产的GT系列运动控制卡GT-400-SV-PCI可以同步控制4个轴,实现多轴协调运动。其核心由ADSP2181数字信号处理器和FPGA组成,能实现高性能的控制计算。控制卡同时提供了C语言函数库和Windows下的动态链接库,可实现复杂的控制功能。主要功能如下: (1) PCI总线,即插即用; (2)可编程伺服采样周期,4轴最小插补周期为200us,单轴点位运动最小控制周期为25us; (3) 4路16位分辨率模拟电压输出信号或脉冲输出信号模拟量输出范围:-10V-+10V,每路课独立控制,互不影响;
探测制导与控制技术
“探测制导与控制技术”专业培养计划 Detection, Guidance and Control Techniques 1.培养目标 结合我校人才培养的总体目标,探测、制导与控制专业为我国航天和国防事业以及国民经济建设培养面向未来发展、富有创新潜质、具备团队精神、善于学习实践的高层次高素质人才。培养学生全面获得电子技术、控制技术、计算机技术、导航制导技术的宽口径基础理论知识和工程实践能力。学生毕业后能够到航天、航空、交通、能源、环境等部门从事航天探测、制导与控制技术以及其它相关技术的研究、系统设计、生产、试验和管理等方面的工作,成为高级工程技术人才。 在本专业中,相当部分的学生将以直读、本硕连读或报考研究生的形式获得进一步的深造。2.培养要求 在品德和政治思想方面:热爱祖国,拥护中国共产党领导,愿为祖国现代化建设服务,为人民服务,有为国家富强、民族昌盛而奋斗的志向和责任感;具有热爱航天事业、艰苦奋斗、热爱劳动、遵纪守法、团结合作的品质;具有良好的思想品德、社会公德和学习作风。 在知识和能力方面:打下坚实的数学、物理等自然科学基础,培养人文和社会科学素养,具有较宽的专业知识和相关的工程实践能力,系统而牢固地掌握测试信号处理、制导与控制技术、传感与检测技术、图像探测处理与识别技术、机电控制技术和系统分析与综合等方面的控制科学与工程技术基本理论和基本知识,受到系统设计、技术开发、产品研制、试验测试以及工程和管理方面的基本训练,具备探测、制导和控制系统的分析方法与综合设计能力。了解本学科的技术动态和发展前沿,能利用已经掌握的知识解决实际问题,具有创新意识,具备独立从事科学研究和开展实际工作的能力,以及适应社会的能力。 在身体素质方面:具有一定的体育和军事基本知识,掌握科学锻炼身体的基本技能,养成良好的体育锻炼和卫生习惯,受到必要的军事训练,达到国家规定的大学生体育和军事训练合格标准,具有健全的心理和健康的体魄,能履行建设祖国和保卫祖国的神圣义务。 3.学制与学位 学制4年,达到专业培养计划和学位条例要求者授予工学学士学位。 4.专业特色 本专业主要开展航天目标及环境的探测、识别、跟踪、定位、制导与控制,以及图像处理和传感检测等方面的研究与教学,包括两个专业方向,即专业方向A:航天导航、制导与控制技术,专业方向B:图像探测、识别与制导技术。学生从三年级开始选择进入专业方向,进行有所侧重的专业学习。
临近空间拦截弹制导控制及一体化设计研究
目 录 摘要................................................................................................................................................. I ABSTRACT .................................................................................................................................... I II 目录................................................................................................................................................ V 缩写与符号说明.......................................................................................................................... VIII 第一章绪论. (1) 1.1 引言 (1) 1.2 国内外研究现状及分析 (3) 1.2.1 现役的拦截弹 (3) 1.2.2 拦截弹复合控制研究现状 (4) 1.2.3 拦截弹导引律研究现状 (6) 1.2.4 导引/控制一体化研究现状 (8) 1.2.5 制导/控制一体化研究现状 (9) 1.2.6 多拦截弹协同制导控制研究现状 (11) 1.3 论文结构及主要研究内容 (12) 第二章临近空间拦截弹的数学建模 (15) 2.1 引言 (15) 2.2 坐标系定义及其转化关系 (15) 2.2.1 常用坐标系 (15) 2.2.2 坐标系间的转换 (16) 2.3 大气模型 (20) 2.4 复合控制拦截弹动力学和运动学模型 (21) 2.4.1 直接侧向力和力矩建模 (22) 2.4.2 气动力和力矩建模 (23) 2.4.3 复合控制拦截弹运动方程组 (23) 2.5 拦截弹-目标相对运动模型 (28) 2.6 本章小结 (30) 第三章基于干扰观测器的临近空间拦截弹复合控制 (31) 3.1 引言 (31) 3.2 基于DO的拦截弹鲁棒H∞复合控制 (31) 3.2.1 问题描述 (31) 3.2.2 DO设计 (32) 3.2.3 鲁棒H∞复合控制器设计 (33) 3.2.4 仿真分析 (37) 3.3 基于NDO的拦截弹动态逆复合控制 (41) 3.3.1 问题描述 (42) 3.3.2 NDO设计 (43) 3.3.3 动态逆复合控制器设计 (45) 3.3.4 动态控制分配 (52) 3.3.5 仿真分析 (58) 3.4 基于FTDO的拦截弹NTSM复合控制 (62) 3.4.1 问题描述 (63)
永磁同步电机调速系统自抗扰控制器的设计
电气传动2017年第47卷第4期 永磁同步电机调速系统自抗扰控制器的设计 曾岳南,曾祥彩,蔡豪,汪亮亮 (广东工业大学自动化学院,广东广州510006) 摘要:将自抗扰控制器(ADRC )运用到永磁同步电机(PMSM )调速系统控制中。电流环采用一阶非线性自抗扰控制器(NLADRC )抵消电流环反电势的影响,减小电流跟踪误差和相电流总谐波畸变(THD );转速环采用一阶线性自抗扰控制器(LADRC )对负载转矩和黏滞摩擦进行补偿,提高系统转速稳定性;最后利用基于带宽的参数整定公式整定控制器参数。仿真和实验结果表明系统具有良好的转速稳定及抗负载扰动能力,验证了控制器设计的有效性。 关键词:永磁同步电机;自抗扰控制器;调速系统;参数整定中图分类号:TM351 文献标识码:A DOI :10.19457/j.1001-2095.20170401 Active Disturbance Rejection Controller Design for PMSM Speed Regulation System ZENG Yuenan ,ZENG Xiangcai ,CAI Hao ,WANG Liangliang (Automation Faculty ,Guangdong University of Technology ,Guangzhou 510006,Guangdong ,China )Abstract:Active disturbance rejection controller (ADRC )was applied to speed control of permanent magnet synchronous motor (PMSM )regulation system.Nonlinear ADRC (NLADRC )were employed for d and q axis current regulation ,so that the effect of back EMF was cancelled by NLADRC ,furthermore ,the tracking error and total harmonic distortion (THD )of phase current were https://www.360docs.net/doc/bf9340276.html,DRC were employed for speed regulation ,the load torque and viscous friction were compensated by LADRC ,as a result ,the speed stability was improved effectively. Finally the controller parameters were tuned based on the bandwidth formula.The simulation and experimental results show that the system has good speed stability and load disturbance performance ,which proves effectiveness of the controller design. Key words:permanent magnet synchronous motor ;active disturbance rejection controller ;speed regulation system ;parameters tuning 作者简介:曾岳南(1962-),男,博士,教授,Email :zengyn@https://www.360docs.net/doc/bf9340276.html, ELECTRIC DRIVE 2017Vol.47No.4 文献[1]将自抗扰控制器应用到火炮伺服控制系统中,推导出火炮系统自抗扰控制器的设计和离散化方法,系统具有较好的鲁棒性和位置跟随性能,但未给出控制器的参数整定方法。文献[2]为了更好地描述实际物理模型,将ADRC 中的状态误差反馈改为比例+分数阶积分的方式,取得了较好的控制效果,但是分数阶积分算法较复杂,计算量大。文献[3]设计了一种直线伺服电机自抗扰控制器,并给出了控制器增益调整的规律,但调整规律比较难以获得,并且整定参数时,没有考虑实际物理系统中的噪声问题。文献[4]将二阶ADRC 应用到机床切削控制系统中,对位置、转速同时控制,取得了较好的控制效果,但未给出控制器的参数选取方法。 本文详细推导了PMSM 调速系统转速环LADRC 、电流环NLADRC 的设计方法,利用基于带宽的参数整定公式得到控制器参数,进行了仿真和实验。仿真和实验结果验证了电流环以及转速环控制器设计的正确性和有效性。 1PMSM 转速环LADRC 控制器设计 LADRC 具有算法简单、参数整定方便等优 点,适用于对带宽要求不高的场合,为此转速环采用LADRC ,包括线性跟踪微分器(LTD )、线性扩展状态观测器(LESO )以及线性状态误差反馈(LSEF )3个部分。 转速控制器输入为转速给定值和反馈值,输出为转矩电流给定。根据PMSM 的电磁转矩和 3 万方数据
探测制导与控制技术培养方案
探测制导与控制技术培养方案 一、专业简介 探测制导与控制技术专业培养航空航天领域的军民两用高素质复合型人才,能在航空、航天、兵器及其它国防和民用单位从事产品设计和制造、应用技术开发、科学研究、工程管理、教学等工作。专业依托控制科学与工程、电子科学与技术、航空宇航科学与技术等重点学科,是在导航工程、自动控制、电子工程等专业基础上创办的国防特色专业,拥有设备先进的国防特色实验室和专业基础实验室。专业师资力量雄厚,培养学生具备扎实的理论基础和专业知识的同时,注重提高学生的科学研究、开发和综合创新能力。经过多年的发展,专业在飞行器导航与控制、室内导航与定位、目标及环境探测与跟踪等方面形成特色。 二、培养目标 培养适应现代化建设需要,具备良好的思想道德修养、身心素质;具有扎实的基础知识和专业理论;具有宽阔的科学视野,独立的科研能力,强烈的创新意识和获取新知识的能力,能运用理论分析、数值模拟和实验研究等手段,研究和解决实际工程问题;具有国际视野,各方面均衡发展的科研学术型和应用型军民两用高级技术人才。 三、培养要求 . 知识要求 拥有良好的人文素质知识、学科基础知识、专业知识。 ①人文素质知识 掌握哲学、思想道德、政治学、法学、社会学、心理学等知识,了解相关知识的发展现状和趋势。 掌握一定的人际交流、管理、行政领导学等知识,满足工程应用中的管理和交流的需要,了解相关知识的发展现状和趋势。 ②学科基础知识 掌握探测制导与控制技术所需的自然科学基础,包括数学、物理等基础,了解相关知识的发展现状和趋势。 掌握探测制导与控制技术所需的工程科学基础,包括理论力学、电子技术、计算机技术等相关学科的知识,了解相关知识的发展现状和趋势。 ③专业知识 掌握测制导与控制技术专业基础理论知识:包括自动控制原理、信号与系统、工程制图、微机
《航天制导与控制基础》作业2014
参考资料:【1】卫星轨道姿态动力学与控制,章仁为,北京航空航天 大学出版社。 【2】航天器控制原理,周军,西北工业大学出版社。 第二章 作 业 一、设刚体B 相对某参考坐标系的姿态可用方向余弦阵A 表示,角 速度矢量为ω,试证明: (1) AA T =E (2) |A |=1 (3) dA/dt = -ω?A 证明:设 ???? ? ?????=3332 31 232221 131211 A A A A A A A A A A (1) ???? ? ???????????????=3323 13 322212312111 3332 31 232221 131211 A A A A A A A A A A A A A A A A A A AA T ??? ? ? ??? ? ?++++++++++++++++++=233 23223123 332232213113331232113133233222312122322222113 231222112133133212311123 132******** 13212211A A A A A A A A A A A A A A A A A A A A A A A A A A A A A A A A A A A A A A A A A A A A A AA T 根据A 阵的性质,可知 ?? ?? ? ?????=100010001T AA (2) 由于方向余弦阵A 描述的坐标系皆为右手正交坐标系,由此可以验证(代入 变换矩阵公式即可验证) A T = A *
又由于 A T = A -1 因此,由 A -1= A */|A | 可以推知 |A |=1 (3) 令姿态相对参考坐标系的转速为ω,转轴为e ,则ω= ω e 。如在t 时刻姿态 矩阵为A (t ) ,在t +?t 时刻为A (t +?t )。如用A '表示姿态的变化,则有 A (t +?t ) =A ' A (t ) 利用Euler 轴/角与姿态矩阵间的转换关系,可以写出 cos (1cos )sin T A I ee e φφφ?'=?+--? 当0t ?→时, A I t ω?'=-? 因此,有 A (t +?t ) = A (t )-ω? ?t A (t ) t t A t t A dt dA t ?-?+=→?) ()(lim /0= -ω? A (t ) 二、试推导方向余弦阵与Euler 轴/角间的转换关系。 解:设转轴为e ,转角为φ,对任意矢量a ,旋转后所对应的矢量为'a ,如图1所示。