Motion planning for humanoid robots under obstacle and dynamic balance constraints

In Proc.2001IEEE Int’l Conf.on Robotics and Automation(ICRA2001)1
Motion Planning for Humanoid Robots Under Obstacle
and Dynamic Balance Constraints
James Ku?ner,Koichi Nishiwaki,Satoshi Kagami,Masayuki Inaba,Hirochika Inoue
Dept.of Mechano-Informatics
The University of Tokyo
{ku?ner,nishi,kagami,inaba,inoue}@jsk.t.u-tokyo.ac.jp
Abstract
We present an approach to path planning for humanoid robots that computes dynamically-stable, collision-free trajectories from full-body posture goals. Given a geometric model of the environment and a statically-stable desired posture,we search the con?gu-ration space of the robot for a collision-free path that si-multaneously satis?es dynamic balance constraints.We adapt existing randomized path planning techniques by imposing balance constraints on incremental search mo-tions in order to maintain the overall dynamic stability of the?nal path.A dynamics?ltering function that con-strains the ZMP(zero moment point)trajectory is used as a post-processing step to transform statically-stable, collision-free paths into dynamically-stable,collision-free trajectories for the entire body.Although we have fo-cused our experiments on biped robots with a humanoid shape,the method generally applies to any robot subject to balance constraints(legged or not).The algorithm is presented along with computed examples using the hu-manoid robot“H6”.
1Introduction
Recently,signi?cant progress has been made in the de-sign and control of humanoid robots,particularly in the realization of dynamic walking in several full-body hu-manoids[11,37,27].As the technology and algorithms for real-time3D vision and tactile sensing improve,hu-manoid robots will be able to perform tasks that involve complex interactions with the environment(e.g.grasp-ing and manipulating objects).The enabling software for such tasks includes motion planning for obstacle avoid-ance,and integrating planning with visual and tactile sensing data.To facilitate the deployment of such soft-ware,we are currently developing a graphical simulation environment for testing and debugging[19].
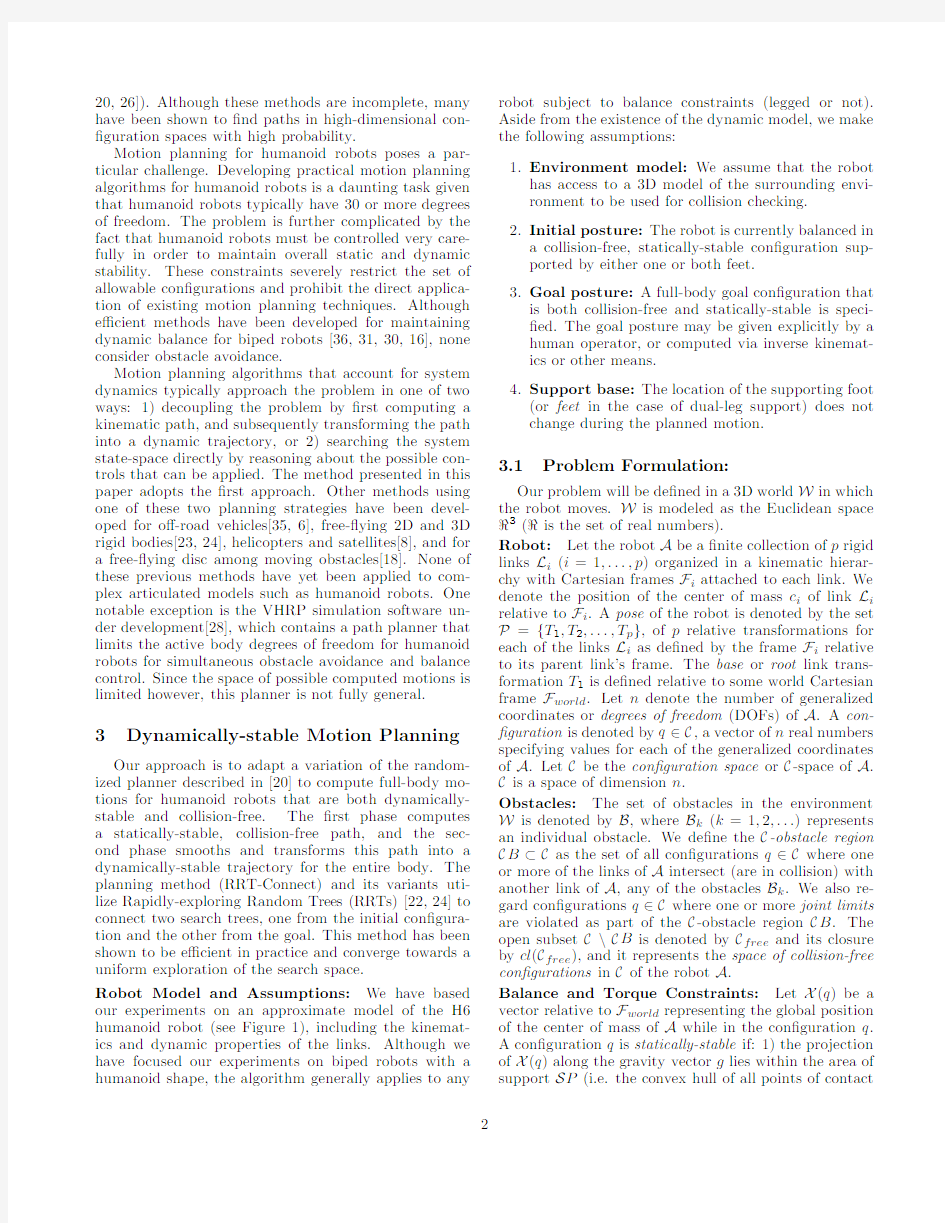
This paper presents an algorithm for automati-cally generating collision-free dynamically-stable mo-tions from full-body posture goals.It expands upon the preliminary algorithm developed in[21],and has been tested and veri?ed on the humanoid robot hardware plat-form“H6”.Our approach is to adapt techniques
from Figure1:Dynamically-stable motion for retrieving an object(top:simulation,bottom:real robot hardware). an existing,successful path planner[20]by imposing bal-
ance constraints upon incremental motions used during the search.Provided the initial and goal con?gurations correspond to collision-free,statically-stable body pos-tures,the path returned by the planner can be trans-formed into a collision-free and dynamically-stable tra-jectory for the entire body.To the best of our knowledge, this paper represents the?rst general motion planning algorithm for humanoid robots that has also been exper-imentally con?rmed on real humanoid robot hardware.
2Background
Due to the complexity of motion planning in its gen-eral form[32],the use of complete algorithms[5,12,33] is limited to low-dimensional con?guration spaces.This has motivated the use of heuristic algorithms,many of which employ randomization(e.g.,[1,2,3,4,14,15,17,
20,26]).Although these methods are incomplete,many have been shown to?nd paths in high-dimensional con-?guration spaces with high probability.
Motion planning for humanoid robots poses a par-ticular challenge.Developing practical motion planning algorithms for humanoid robots is a daunting task given that humanoid robots typically have30or more degrees of freedom.The problem is further complicated by the fact that humanoid robots must be controlled very care-fully in order to maintain overall static and dynamic stability.These constraints severely restrict the set of allowable con?gurations and prohibit the direct applica-tion of existing motion planning techniques.Although e?cient methods have been developed for maintaining dynamic balance for biped robots[36,31,30,16],none consider obstacle avoidance.
Motion planning algorithms that account for system dynamics typically approach the problem in one of two ways:1)decoupling the problem by?rst computing a kinematic path,and subsequently transforming the path into a dynamic trajectory,or2)searching the system state-space directly by reasoning about the possible con-trols that can be applied.The method presented in this paper adopts the?rst approach.Other methods using one of these two planning strategies have been devel-oped for o?-road vehicles[35,6],free-?ying2D and3D rigid bodies[23,24],helicopters and satellites[8],and for a free-?ying disc among moving obstacles[18].None of these previous methods have yet been applied to com-plex articulated models such as humanoid robots.One notable exception is the VHRP simulation software un-der development[28],which contains a path planner that limits the active body degrees of freedom for humanoid robots for simultaneous obstacle avoidance and balance control.Since the space of possible computed motions is limited however,this planner is not fully general.
3Dynamically-stable Motion Planning Our approach is to adapt a variation of the random-ized planner described in[20]to compute full-body mo-tions for humanoid robots that are both dynamically-stable and collision-free.The?rst phase computes a statically-stable,collision-free path,and the sec-ond phase smooths and transforms this path into a dynamically-stable trajectory for the entire body.The planning method(RRT-Connect)and its variants uti-lize Rapidly-exploring Random Trees(RRTs)[22,24]to connect two search trees,one from the initial con?gura-tion and the other from the goal.This method has been shown to be e?cient in practice and converge towards a uniform exploration of the search space.
Robot Model and Assumptions:We have based our experiments on an approximate model of the H6 humanoid robot(see Figure1),including the kinemat-ics and dynamic properties of the links.Although we have focused our experiments on biped robots with a humanoid shape,the algorithm generally applies to any robot subject to balance constraints(legged or not). Aside from the existence of the dynamic model,we make the following assumptions:
1.Environment model:We assume that the robot
has access to a3D model of the surrounding envi-ronment to be used for collision checking.
2.Initial posture:The robot is currently balanced in
a collision-free,statically-stable con?guration sup-
ported by either one or both feet.
3.Goal posture:A full-body goal con?guration that
is both collision-free and statically-stable is speci-?ed.The goal posture may be given explicitly by a human operator,or computed via inverse kinemat-ics or other means.
4.Support base:The location of the supporting foot
(or feet in the case of dual-leg support)does not change during the planned motion.
3.1Problem Formulation:
Our problem will be de?ned in a3D world W in which the robot moves.W is modeled as the Euclidean space 3( is the set of real numbers).
Robot:Let the robot A be a?nite collection of p rigid links L i(i=1,...,p)organized in a kinematic hierar-chy with Cartesian frames F i attached to each link.We denote the position of the center of mass c i of link L i relative to F i.A pose of the robot is denoted by the set P={T1,T2,...,T p},of p relative transformations for each of the links L i as de?ned by the frame F i relative to its parent link’s frame.The base or root link trans-formation T1is de?ned relative to some world Cartesian frame F world.Let n denote the number of generalized coordinates or degrees of freedom(DOFs)of A.A con-?guration is denoted by q∈C,a vector of n real numbers specifying values for each of the generalized coordinates of A.Let C be the con?guration space or C-space of A.
C is a space of dimension n.
Obstacles:The set of obstacles in the environment W is denoted by B,where B k(k=1,2,...)represents an individual obstacle.We de?ne the C-obstacle region C B?C as the set of all con?gurations q∈C where one or more of the links of A intersect(are in collision)with another link of A,any of the obstacles B k.We also re-gard con?gurations q∈C where one or more joint limits are violated as part of the C-obstacle region C B.The open subset C\C B is denoted by C free and its closure by cl(C free),and it represents the space of collision-free con?gurations in C of the robot A.
Balance and Torque Constraints:Let X(q)be a vector relative to F world representing the global position of the center of mass of A while in the con?guration q.
A con?guration q is statically-stable if:1)the projection of X(q)along the gravity vector g lies within the area of support S P(i.e.the convex hull of all points of contact
between A and the support surface in W),and2)the joint torquesΓneeded to counteract the gravity-induced torques G(q)do not exceed the maximum torque bounds Γmax.Let C stable?C be the subset of statically-stable con?gurations of A.Let C valid=C stable∩C free denote the subset of con?gurations that are both collision-free and statically-stable postures of the robot A.C valid is called the set of valid con?gurations.
Solution Trajectory:Letτ:I→C where I is an interval[t0,t1],denote a motion trajectory or path for A expressed as a function of time.τ(t)represents the con?guration q of A at time t,where t∈I.A trajectory τis said to be collision-free ifτ(t)∈C free for all t∈I.A trajectoryτis said to be both collision-free and statically-stable ifτ(t)∈C valid for all t∈I.Given q init∈C valid and q init∈C valid,we wish to compute a continuous motion trajectoryτsuch that?t∈[t0,t1],τ(t)∈C valid,andτ(t0)=q init andτ(t1)=q goal.We refer to such a trajectory as a statically-stable trajectory. Dynamic Stability:Theoretically,any statically-stable trajectory can be transformed into a dynamically-stable trajectory by arbitrarily slowing down the motion. For these experiments,we utilize the online balance com-pensation scheme described in[16]as a method of gen-erating a?nal dynamically-stable trajectory after path smoothing(see Section3.4).
Planning Query:Note that in general,if a dynamically-stable solution trajectory exists for a given path planning query,there will be many such solution trajectories.LetΦdenote the set of all dynamically-stable solution trajectories for a given problem.The query P lanner(A,B,q init,q goal)?→τ,accepts as in-put the robot and obstacle models along with the initial and goal postures,and attempts to calculate a solution trajectoryτ∈Φ.If no solution is found,τwill be empty
(a null trajectory).
3.2Path Search
Unfortunately,there are no currently known methods for explicitly representing C valid.The obstacles are mod-eled completely in W,thus an explicit representation of C free is also not available.However,using a collision detection algorithm,a given q∈C can be tested to de-termine whether q∈C free.Testing whether q∈C stable can also be checked verifying that the projection of X(q) along g is contained within the boundary of S P,and that the torquesΓneeded to counteract gravitational torques G(q)do not exceedΓmax.
Distance Metric:As with the most planning algo-rithms in high-dimensions,a metricρis de?ned on C. The functionρ(q,r)returns some measure of the dis-tance between the pair of con?gurations q and r.Some axes in C are weighted relative to each other,but the general idea is to measure the“closeness”of pairs of con?gurations with a positive scalar function.
For our humanoid robot models,we employ a metric that assigns higher relative weights to the generalized co-ordinates of links with greater mass and proximity to the trunk(torso):ρ(q,r)= n i=1w i||q i?r i||.This choice of metric function attempts to heuristically encode a gen-eral relative measure of how much the variation of an individual joint parameter a?ects the overall body pos-ture.Additional experimentation is needed in order to evaluate the e?cacy of the many di?erent metric func-tions possible.
Planning Algorithm:We employ a randomized search strategy based on Rapidly-exploring Random Trees(RRTs)[23,20].For implementation details and analysis of RRTs,the reader is referred to the original papers or a summary in[24].In[21],we developed an RRT variant the generates search trees using a dynamics ?lter function to guarantee dynamically-stable trajecto-ries along each incremental search motion.
The algorithm described in this paper is more general and e?cient than the planner presented in[21],since it does not require the use of a dynamics?ltering func-tion during the path search phase.In addition,it can handle either single or dual-leg support postures,and the calculated trajectories have been veri?ed using real robot hardware.The basic idea is the same as the RRT-Connect algorithm described in[20].The key di?erence is that instead of searching C for a solution path that lies within C free,the search is performed in C stable for a solution path that lies within C valid.In particular,we modify the planner variant that employs symmetric calls to the EXTEND function as follows:
1.The NEW CONFIG function in the EXTEND opera-
tion checks balance constraints in addition to check-ing for collisions with obstacles(i.e.q new∈C valid).
2.Rather than picking a purely random con?guration
q rand∈C at every planning iteration,we pick a random con?guration that also happens to corre-spond to a statically-stable posture of the robot(i.e.
q rand∈C stable).
Pseudocode for the complete algorithm is given in Fig-ure2.The main planning loop involves performing a simple iteration in which each step attempts to extend the RRT by adding a new vertex that is biased by a randomly-generated,statically-stable con?guration(see Section3.3).EXTEND selects the nearest vertex already in the RRT to the given con?guration,q,with respect to the distance metricρ.Three situations can occur: Reached,in which q is directly added to the RRT,Ad-vanced,in which a new vertex q new=q is added to the RRT;Trapped,in which no new vertex is added due to the inability of NEW CONFIG to generate a path seg-ment towards q that lies within C valid.
NEW CONFIG attempts to make an incremental mo-tion toward q.Speci?cally,it checks for the existence of a short path segmentδ=(q near,q new)that lies entirely within C valid.Ifρ(q,q near)< ,where is some?xed incremental distance,then q itself is used as the new con?guration q new at the end of the candidate path seg-mentδ(i.e.q new=q).Otherwise,q new is generated at
EXTEND(T,q)
1q near←NEAREST NEIGHBOR(q,T);
2if NEW CONFIG(q,q near,q new)then
3T.add vertex(q new);
4T.add edge(q near,q new);
5if q new=q then Return Reached;
6else Return Advanced;
7Return Trapped;
RRT CONNECT STABLE(q init,q goal)
1T a.init(q init);T b.init(q goal);
2for k=1to K do
3q rand←RANDOM STABLE CONFIG();
4if not(EXTEND(T a,q rand)=Trapped)then 5if(EXTEND(T b,q new)=Reached)then
6Return PATH(T a,T b);
7SWAP(T a,T b);
8Return Failure
Figure2:Pseudocode for the dynamically-stable motion planning algorithm.
a distance along the straight-line from q near to q.1All con?gurations q along the path segmentδare checked for collision,and tested whether balance constraints are satis?ed.Speci?cally,if?q ∈δ(q near,q new),q ∈C valid, then NEW CONFIG succeeds,and q new is added to the tree T.In this way,the planner uses uniform samples of C stable in order to grow trees that lie entirely within C valid.
Convergence and Completeness:Although not given here,arguments similar to those presented in[20] and[24]can be constructed to show uniform coverage and convergence over C valid.
Ideally,we would like to build a complete planning al-gorithm.That is,the planner always returns a solution trajectory if one exists,and indicates failure if no solu-tion exists.As mentioned in Section2,implementing a practical complete planner is a daunting task for even low-dimensional con?guration spaces(see[13]).Thus, we typically trade o?completeness for practical perfor-mance by adopting heuristics(e.g.randomization).
The planning algorithm implemented here is incom-plete in that it returns failure after a preset time limit is exceeded.Thus,if the planner returns failure,we cannot conclude whether or not a solution exists for the given planning query,only that our planner was unable to?nd one in the allotted time.Uniform coverage and conver-gence proofs,though only theoretical,at least help to provide some measure of con?dence that when an algo-rithm fails to?nd a solution,it is likely that no solution 1A slight modi?cation must be made for the case of dual-leg support.In this case,when interpolating two stable con?gurations, inverse kinematics for the leg is used to force the relative position between the feet to remain?xed.The same s technique is also used for generating random statically-stable dual-leg postures(see Section3.3).exists.This is an area of ongoing research.
3.3Random Statically-stable Postures
For our algorithm to work,we require a method of generating random statically-stable postures(i.e.ran-dom point samples of C stable).Although it is trivial to generate random con?gurations in C,it is not so easy to generate them in C stable,since it encompasses a much smaller subset of the con?guration space.
In our current implementation,a set Q stable?C stable of N samples of C stable is generated as a preprocess-ing step.This computation is speci?c to a particular robot and support-leg con?guration,and need only be performed once.Di?erent collections of stable postures are saved to?les and can be loaded into memory when the planner is initialized.Although stable con?gura-tions could be generated“on-the-?y”at the same time the planner performs the search,pre-calculating Q stable is preferred for e?ciency.In addition,multiple stable-con?guration set?les for a particular support-leg con?g-uration can be saved independently.If the planner fails to?nd a path after all N samples have been removed from the currently active Q stable set,a new one can be loaded with di?erent samples.
Single-leg Support Con?gurations:For con?gura-tions that involve balancing on only one leg,the set Q stable can be populated as follows:
1.The con?guration space of the robot C is sampled by
generating a random body con?guration q rand∈C.
2.Assuming the right leg is the supporting foot,q rand
is tested for membership in C valid(i.e.static stabil-ity,no self-collision,and joint torques below limits).
https://www.360docs.net/doc/b615305618.html,ing the same sample q rand,a similar test is per-
formed assuming the left leg is the supporting foot.
4.Since most humanoid robots have left-right symme-
try,if q rand∈C valid in either or both cases,we can “mirror”q rand to generate stable postures for the opposite foot.
Dual-leg Support Con?gurations:It is slightly more complicated to generate statically-stable body con-?gurations supported by both feet at a given?xed rela-tive position.In this case,populating Q stable is very sim-ilar to the problem of sampling the con?guration space of a constrained closed-chain system(e.g.closed-chain manipulator robots or molecular conformations[25,10]). The set Q stable is populated with?xed-position dual-leg support postures as follows:
1.As in the single-leg case,the con?guration space of
the robot C is sampled by generating a random body con?guration q rand∈C.
2.Holding the right leg?xed at its random con?gura-
tion,inverse kinematics is used to attempt to po-sition the left foot at the required relative position to generate the body con?guration q right.If it suc-ceeds,then q right is tested for membership in C valid.
3.An identical procedure is performed to generate
q left by holding the left leg?xed at its random con-?guration derived from q rand,using inverse kinemat-ics to position the right leg,and testing for mem-bership in C valid.
4.If either q right∈C valid or q left∈C valid,and the
robot has left-right symmetry,additional stable pos-tures can be derived by mirroring the generated sta-ble con?gurations.
3.4Trajectory Generation
If successful,the path search phase returns a continu-ous sequence of collision-free,statically-stable body con-?gurations.All that remains is to calculate a?nal solu-tion trajectoryτthat is dynamically-stable and collision-free.Theoretically,any given statically-stable trajectory can be transformed into a dynamically-stable trajectory by arbitrarily slowing down the motion.However,we can almost invariably obtain a smoother and shorter trajec-tory by performing the following two steps: Smoothing:We smooth the raw path by making sev-eral passes along its length,attempting to replace por-tions of the path between selected pairs of con?gurations by straight-line segments in C valid.2This step typically eliminates any potentially unnatural postures along the random path(e.g.unnecessarily large arm motions). The resulting smoothed path is transformed into an in-put trajectory using a minimum-jerk model[7]. Filtering:A dynamics?ltering function is used in or-der to output a?nal,dynamically-stable trajectory.We use the online balance compensation scheme described in [16],which enforces constraints upon the zero moment point(ZMP)trajectory in order to maintain overall dy-namic stability.The output con?guration of the?lter is guaranteed to lie in C stable.Collision-checking is used to verify that the?nal output trajectory lies in C valid,with the motion made slower in the case of collision. Although this method has generated satisfactory results in our experiments,it is by no means the only option. Other ways of generating dynamically-stable trajectories from a given input motion are also potentially possible to apply here(e.g.[37,29]).It is also possible to em-ploy variational techniques,or apply algorithms for com-puting time-optimal trajectories[34].Calculating the globally-optimal trajectory according to some cost func-tional based on the obstacles and the dynamic model is an open problem,and an area of ongoing research.
2When interpolating dual-leg con?gurations,inverse kinematics is used to keep the relative position of the feet?xed.
Task Description Computation Time(seconds)
min max avg stdev Reach under chair171598324138
Lift leg over box261034821
Reach over table194652371146
Table1:Performance statistics(N=25trials).
4Experiments
This section presents some preliminary experiments performed on a270MHz SGI O2(R12000)worksta-tion.We have implemented a prototype planner in C++ that runs within a graphical simulation environment[19]. An operator can position individual joints or use inverse kinematics to specify body postures for the virtual robot. The?lter function can be run interactively to ensure that the goal con?guration is statically-stable.After specifying the goal,the planner is invoked to attempt to compute a dynamically-stable trajectory connecting the goal con?guration to the robot’s initial con?guration (assumed to be a collision-free,stable posture).
We have tested the output trajectories calculated by the planner on an actual humanoid robot hardware plat-form.The“H6”humanoid robot(33-DOF)is137cm tall and weighs51kg(including4kg of batteries).Figure1 shows a computed dynamically-stable motion for the H6 robot moving from a neutral standing position to a low crouching position in order to retrieve an object from be-neath a chair.Figure3shows a di?erent view of the real robot executing the same motion.Figure4shows a mo-tion for positioning the right leg above the top of a box while balancing on the left leg.The motion in Figure5 was not executed on the real robot,but is interesting in that it involves reaching for an object placed on top of a cabinet while avoiding both the cabinet and the shelves behind the robot.The robot is required to balance on one leg in order to extend the arm far enough to reach the obstacle on the table.
Each of the scenes contains over9,000triangle primi-tives.The3D collision checking software used for these experiments was the RAPID library based on OBB-Trees developed by the University of North Carolina[9].The total wall time elapsed in solving these queries ranges from under30seconds to approximately11minutes.A summary of the computation times for repeated runs of 25trials each is shown in Table1.
5Discussion
This paper presents an algorithm for computing dynamically-stable collision-free trajectories given full-body posture goals.Although we have focused our ex-periments on biped robots with a humanoid shape,the algorithm is general and can be applied to any robot subject to balance constraints(legged or not).There are many potential uses for such software,with the primary one being a high-level control interface for automatically computing motions to solve complex tasks for humanoid
robots that involve simultaneous obstacle-avoidance and balance constraints.
The limitations of the algorithm form the basis for our future work:1)the current implementation of the planner can only handle a?xed position for either one or both feet.2)The e?ectiveness of di?erent con?guration space distance metrics needs to be investigated.3)We currently have no method for integrating visual or tactile feedback.
Acknowledgments:We thank Fumio Kanehiro and Yukiharu Tamiya for their e?orts in developing the Auto-Balancer software library.We are grateful to Steven LaValle and Hirohisa Hirukawa for helpful discussions.This research is supported in part by a Japan Society for the Promotion of Science(JSPS)Postdoctoral Fellowship for Foreign Scholars in Science and Engineering,and by JSPS Grant-in-Aid for Research for the Future(JSPS-RFTF96P00801).
References
[1]N.Amato and Y.Wu.A randomized roadmap method for
path and manipuation planning.In Proc.IEEE Int.Conf.
Robot.&Autom.(ICRA),pages113–120,1996.
[2]J.Barraquand and https://www.360docs.net/doc/b615305618.html,tombe.Robot motion planning:
A distributed representation approach.Int.J.Robot.Res.,
10(6):628–649,December1990.
[3]R.Bohlin and L.Kavraki.Path planning using Lazy PRM.
In Proc.IEEE Int.Conf.Robot.&Autom.(ICRA),April 2000.
[4]V.Boor,M.Overmars,and A.F.van der Stappen.The gaus-
sian sampling strategy for probabilistic roadmap planners.In Proc.IEEE Int.Conf.Robot.&Autom.(ICRA),1999. [5]J.F.Canny.The Complexity of Robot Motion Planning.MIT
Press,Cambridge,MA,1988.
[6]M.Cherif and https://www.360docs.net/doc/b615305618.html,ugier.Motion planning of autonomous
o?-road vehicles under physical interaction constraints.In Proc.IEEE Int.Conf.Robot.&Autom.(ICRA),May1995.
[7]T.Flash and N.Hogan.The coordination of arm movements:
an experimentally con?rmed mathematical model.J.Neu-rosci.,5(7):1688–1703,1985.
[8] E.Frazzoli,M.A.Dahleh,and E.Feron.Robust hybrid con-
trol for autonomous vehicles motion planning.Technical re-port,Laboratory for Information and Decision Systems,Mas-sachusetts Institute of Technology,Cambridge,MA,1999.
Technical report LIDS-P-2468.
[9]S.Gottschalk,M.C.Lin,and D.Manocha.Obbtree:A hi-
erarchical structure for rapid interference detection.In SIG-GRAPH’96Proc.,1996.
[10]Li Han and Nancy M.Amato.A kinematics-based probabilis-
tic roadmap method for closed chain systems.In Proc.Int.
Workshop Alg.Found.Robot.(WAFR),March2000.
[11]Kazuo Hirai.Current and future perspective of honda hu-
manoid robot.In Proc.IEEE/RSJ Int.Conf.Intell.Robot.
&Sys.(IROS),pages500–508,1997.
[12]H.Hirukawa, B.Mourrain,and Y.Papegay.A symbolic-
numeric silhouette algorithm.In Proc.IEEE/RSJ Int.Conf.
Intell.Robot.&Sys.(IROS),November2001.
[13]H.Hirukawa and Y.Papegay.Motion planning of objects in
contact by the silhouette algorithm.In Proc.IEEE Int.Conf.
Robot.&Autom.(ICRA),pages722–729,April2000. [14]T.Horsch,F.Schwarz,and H.Tolle.Motion planning for
many degrees of freedom:Random re?ections at c-space ob-stacles.In Proc.IEEE Int.Conf.Robot.&Autom.(ICRA), pages3318–3323,April1994.
[15] D.Hsu,https://www.360docs.net/doc/b615305618.html,tombe,and R.Motwani.Path planning in
expansive con?guration https://www.360docs.net/doc/b615305618.html,put.Geom.& Appl.,9(4-5):495–512,1997.[16]S.Kagami,F.Kanehiro,Y.Tamiya,M.Inaba,and H.Inoue.
AutoBalancer:An Online Dynamic Balance Compensation Scheme for Humanoid Robots.In Proc.Int.Workshop Alg.
Found.Robot.(WAFR),2000.
[17]L.Kavraki,P.ˇSvestka,https://www.360docs.net/doc/b615305618.html,tombe,and M.H.Over-
mars.Probabilistic roadmaps for path planning in high-dimensional con?guration space.IEEE Trans.Robot.&Au-tom.,12(4):566–580,1996.
[18]R.Kindel,D.Hsu,https://www.360docs.net/doc/b615305618.html,tombe,and S.Rock.Kinodynamic
motion planning amidst moving obstacles.In Proc.IEEE Int.
Conf.Robot.&Autom.(ICRA),April2000.
[19]J.J.Ku?ner,S.Kagami,M.Inaba,and H.Inoue.Graphi-
cal simulation and high-level control of humanoid robots.In Proc.IEEE/RSJ Int.Conf.Intell.Robot.&Sys.(IROS), November2000.
[20]J.J.Ku?ner and https://www.360docs.net/doc/b615305618.html,Valle.RRT-Connect:An e?cient
approach to single-query path planning.In Proc.IEEE Int.
Conf.Robot.&Autom.(ICRA),April2000.
[21]J.J.Ku?ner,S.Kagami,M.Inaba,and H.Inoue.
Dynamically-stable motion planning for humanoid robots.In IEEE-RAS Int.Conf.Human.Robot.(Humanoids),Boston, MA,September2000.
[22]https://www.360docs.net/doc/b615305618.html,Valle.Rapidly-exploring random trees:A new
tool for path planning.TR98-11,Computer Science Dept.,Iowa State Univ.
[23]https://www.360docs.net/doc/b615305618.html,Valle and J.J Ku?ner.Randomized kinodynamic
planning.In Proc.IEEE Int.Conf.Robot.&Autom.(ICRA), May1999.
[24]https://www.360docs.net/doc/b615305618.html,Valle and J.J Ku?ner.Rapidly-exploring random
trees:Progress and prospects.In Proc.Int.Workshop Alg.
Found.Robot.(WAFR),March2000.
[25]https://www.360docs.net/doc/b615305618.html,Valle,J.H.Yakey,and L.E.Kavraki.A probabilistic
roadmap approach for systems with closed kinematic chains.
In Proc.IEEE Int.Conf.Robot.&Autom.(ICRA),1999.
[26] E.Mazer,J.M.Ahuactzin,and P.Bessi`e re.The Ariadne’s
clew algorithm.J.Arti?cial Intell.Res.,9:295–316,Novem-ber1998.
[27]K.Nagasaka,M.Inaba,and H.Inoue.Walking pattern
generation for a humanoid robot based on optimal gradient method.In Proc.IEEE Int.Conf.Sys.Man.&Cyber.,1999.
[28]Y.Nakamura and et.al.V-HRP:Virtual humanoid robot
platform.In IEEE-RAS Int.Conf.Human.Robot.(Hu-manoids),September2000.
[29]Y.Nakamura and K.Yamane.Interactive motion generation
of humanoid robots via dynamics?lter.In Proc.of First IEEE-RAS Int.Conf.on Humanoid Robots,September2000.
[30]J.Pratt and G.Pratt.Exploiting natural dynamics in the
control of a3d bipedal walking simulation.In In Proc.of Int.Conf.on Climbing and Walking Robots(CLAWAR99), September1999.
[31]Marc Raibert.Legged Robots that Balance.MIT Press,Cam-
bridge,MA,1986.
[32]https://www.360docs.net/doc/b615305618.html,plexity of the mover’s problem and generaliza-
tions.In Proc.20th IEEE Symp.on Foundations of Computer Science(FOCS),pages421–427,1979.
[33]J.T.Schwartz and M.Sharir.On the‘piano movers’problem:
Ii.general techniques for computing topological properties of real algebraic manifolds.Advances in applied Mathematics, 4:298–351,1983.
[34]Z.Shiller and S.Dubowsky.On computing time-optimal mo-
tions of robotic manipulators in the presence of obstacles.
IEEE Trans.Robot.&Autom.,7(7),December1991. [35]Z.Shiller and R.Y.Gwo.Dynamic motion planning of au-
tonomous vehicles.IEEE Trans.Robot.&Autom.,7(2):241–249,April1991.
[36]M.Vukobratovic,B.Borovac,D.Surla,and D.Stokie.Biped
Locomotion:Dynamics,Stability,Control,and Applications.
Springer-Verlag,Berlin,1990.
[37]J.Yamaguchi,S.Inoue,D.Nishino,and A.Takanishi.De-
velopment of a bipedal humanoid robot having antagonistic driven joints and three dof trunk.In Proc.IEEE/RSJ Int.
Conf.Intell.Robot.&Sys.(IROS),pages96–101,1998.
Figure 3:Dynamically-stable crouching trajectory for retrieving an object from beneath an obstacle
.
Figure 4:Positioning the right foot above an obstacle while balancing on the left leg.(top :simulation,bottom :actual hardware).
Figure 5:Reaching for an object atop a cabinet while avoiding obstacles and balancing on the right leg.
完整版初中英语语法大全知识点总结
英语语法大全 初中英语语法 学习提纲 一、词类、句子成分和构词法: 1、词类:英语词类分十种: 名词、形容词、代词、数词、冠词、动词、副词、介词、连词、感叹词。 1、名词(n.):表示人、事物、地点或抽象概念的名称。如:boy, morning, bag, ball, class, orange. :who, she, you, it . 主要用来代替名词。如): 2、代词(pron.3、形容词(adj..):表示人或事物的性质或特征。如:good, right, white, orange . 4、数词(num.):表示数目或事物的顺序。如:one, two, three, first, second, third, fourth. 5、动词(v.):表示动作或状态。如:am, is,are,have,see . 6、副词(adv.):修饰动词、形容词或其他副词,说明时间、地点、程度等。如:now, very, here, often, quietly, slowly. 7、冠词(art..):用在名词前,帮助说明名词。如:a, an, the. 8、介词(prep.):表示它后面的名词或代词与其他句子成分的关系。如in, on, from, above, behind. 9、连词(conj.):用来连接词、短语或句子。如and, but, before . 10、感叹词(interj..)表示喜、怒、哀、乐等感情。如:oh, well, hi, hello. 2、句子成分:英语句子成分分为七种:主语、谓语、宾语、定语、状语、表语、宾语补足语。 1、主语是句子所要说的人或事物,回答是“谁”或者“什么”。通常用名词或代词担任。如:I'm Miss Green.(我是格林小姐) 2、谓语动词说明主语的动作或状态,回答“做(什么)”。主要由动词担任。如:Jack cleans the room every day. (杰克每天打扫房间) 3、表语在系动词之后,说明主语的身份或特征,回答是“什么”或者“怎么样”。通常由名词、 代词或形容词担任。如:My name is Ping ping .(我的名字叫萍萍) 4、宾语表示及物动词的对象或结果,回答做的是“什么”。通常由名词或代词担任。如:He can spell the word.(他能拼这个词) 有些及物动词带有两个宾语,一个指物,一个指人。指物的叫直接宾语,指人的叫间接宾语。间接 宾语一般放在直接宾语的前面。如:He wrote me a letter . (他给我写了 一封信) 有时可把介词to或for加在间接宾语前构成短语,放在直接宾语后面,来强调间接宾语。如:He wrote a letter to me . (他给我写了一封信)
初中英语中主谓一致详解
主谓一致详解 【基础知识】 主谓一致指“人称”和“数”方面的一致关系。对大多数人来说,往往会在掌握主语和随后的谓语动词之间的一致问题上遇到困难。一般情况下,主谓之间的一致关系由以下三个原则支配: 语法一致原则(grammatical concord) 意义一致原则(notional concord) 就近原则(principle of proximity) (一)语法一致原则 用作主语的名词词组中心词和谓语动词在单、复数形式上的一致,就是语法一致。也就是说,如果名词中心词是单数,动词用单数形式;如果名词中心词是复数,动词用复数形式。例如: This table is a genuine antique. Both parties have their own advantages. Her job has something to do with computers. She wants to go home. They are divorcing each other. Mary was watching herself in the mirror. The bird built a nest. Susan comes home every week-end. (二)意义一致原则 有时,主语和谓语动词的一致关系取决于主语的单、复数意义,而不是语法上的单、复数形式,这样的一致关系就是意义一致。例如: Democratic government gradually take the place of an all-powerful monarchy. A barracks was attacked by the guerilla. Mumps is a kind of infectious disease. The United States is a developed country. It is the remains of a ruined palace. The archives was lost.
小学语文修改语段(有答案)
小学语文修改语段 请用修改符号修改下列语段 修改1: 今天我读了一篇童话故事“卖火柴的小女孩”。这篇童话的作者是被称为世界童话之王的安徒生写的。小女孩的命运实在是太悲伤了。读了童话以后,使我的心情久久不能平息。 解题指导: 修改语段就像是生活中医生给病人看病一样,我们是“医生”,“病人”即病句。“医生”给“病人”看病主要有以下几个步骤: 1.诊断病因,就是找毛病。一般病因主要有搭配不当、意思重复、缺少成分、次序颠倒、关联词不当、错别字、标点不对等几类毛病。最好的诊断办法——“读”,反复读,读懂句子,明确这短话所表达的意思,细致理解词语的意思,判断出是哪儿出了问题,这是最关键的一步。 2.开药方。改错时要对症下药:a、搭配不当的,在脑海中搜寻合适的“部件”;b、意思重复的,“切割”掉多余的部分,但要注意剩下的通顺不;c、缺少成分的,补充适合的“营养成分”;d、次序颠倒的,重新“装配”…… 3.动手术。动笔改跟动手术一样必须精确,不能多字少字,哪怕标点符号也注意,记住:遵原意,少改动。 4.复查。改完后我们还要对所改的地方进行仔细检查,把改好的话反复读,以确保正确无误。 参考答案: 今天我读了一篇童话故事《卖火柴的小女孩》。这篇童话的作者是被称为“世界童话之王”的安徒生。小女孩的命运实在是太凄惨了。读了童话以后,我的心情久久不能平静。 修改2: 明天,我们既将毕业。这学期,我们学习更加勤奋刻苦了。我们经常阅读的世界名著有《鲁滨逊漂流记》、《三国演义》和《少年文艺》。大量的课外阅读,使我们增长了知识和写作水平。我写的一篇读后感“我眼中的诸葛亮”发布在《创新作文》上。 解题指导: 修改病段是考查学生的综合修改能力,一般有改错别字、病句、错标点,有时还有格式的错误(如书信),有时也有顺序错乱等情况。一定要通读全段,然后再一句一句地找,一句一句地改。 参考答案: “既将”改为“即将”,“勤奋”“刻苦”删去一个,“和《少年文艺》”改为“等”,“和写作水平”改为“,提高了写作水平”,“‘我也想当回诸葛亮’”改为“《我也想当回诸葛亮》“发布”改为“发表”。 修改3: 在《书香江苏》读书活动中,通过网上读书,使我们认识了海伦·凯勒、鲁滨逊、孙悟空……等众多人物形象,我写的一遍读后感“我也想当回诸葛亮”刊登在《新语文学习》上,我们班还被评为“阅读先进班级”的光荣称号呢。 解题指导: 修改病段是考查学生的综合修改能力,一般有改错别字、病句、错标点,有时还有格式的错误(如书信),有时也有顺序错乱等情况。一定要通读全段,然后再一句一句地找,一句一句地改。 参考答案: 在“书香江苏”读书活动中,通过网上读书,我们认识了海伦·凯勒、鲁滨逊、孙悟空等众多人物形象,我写的一篇读后感《我也想当回诸葛亮》刊登在《新语文学习》上,我们班还被评为“阅读先进班级”呢。 修改4: 暑假里的一天,气候闷热。一会儿,天空乌云蜜布,刮起了微风。雷电紧跟着闪电,震得窗户直响。雨哗哗地下起来,越下越大。向窗外望去,近处的景物看不见了,远处的景物也看不清了。 解题指导:
5.4专家意见修改说明
山东中纤越弘化工科技有限公司5万吨/年硼酸及副产品 3.5万吨/年硝酸钠项目安全设施设计专篇 修改说明 序 号 专家评审意见对应修改情况 1 纠正设计专篇首页及页眉的项目标题错误;明 确设计范围。 已修改首页及页眉的项目标题错误, 改为5万吨/年硼酸及副产品3.5万吨 /年硝酸钠项目;P9对设计范围进行了 修改,明确为生产一车间两条生产线。 2 设计依据补充法律、法规、文件年号;纠 正引用GB50058 等标准、规范的错误;补充《危 险化学品名录》 (2015版)、《化学工业建构筑 物抗震设防分类标准》等依据、HG20571-2014, 依据《危险化学品名录》 (2015版)对涉及的危 险化学品进行辨识及分析;表4.2.3依据标准 按GB50016-2014进行设计;专篇中不应引用《安 全生产法》老版有关规定(P92)。 GB50058去掉爆炸和;对危险化学品辨 识依据改为《危险化学品名录》(2015 版);表 4.2.3中依据标准改为 GB50016-2014;P95-96对涉及的《安 全生产法》按新条款进行了修改。 3 补充项目距离东侧高压线、闲置房防火距 离分析;核实主要建筑物平面布置距离表中生 产车间距离西侧、南侧围墙距离及符合性分析; 补充硝酸罐与道路的间距分析;确定厂内主、 次要道路的宽度。 P28补充与高压线、闲置房的距离及符 合性分析;P55-56对车间距离围墙间 距符合性进行了分析说明;表 4.2.3 补充硝酸罐与道路的间距分析; P56-57对主、次要道路宽度进行说明。 4 核实硝酸用量与储存能力匹配性说明;核 实表2.3中硼酸的存储方式;补充硝酸分解出 二氧化氮气体毒性分析。 P20对硝酸用量与储存能力匹配性进 行了修改说明;修改了表2.3中硼酸 的储存方式为袋装;P40补充了硝酸分 解产生二氧化氮气体的毒性分析。 5 应急救援器材配备表中不应列入个体劳动 防护用品;纠正项目安全生产管理人员设置的 错误。 P87修改了应急器材配备表,删去工作 服等;P80对安全生产管理人员数量进 行修改为专职安全员4人。 6 安全设施一览表中不涉及项目不应下符合 性结论,纠正对安全带数量的统计错误(p117), 明确液位计选型,安全阀、淋洗器数量。补充 腐蚀性管道法兰处防喷溅措施。 P113修改安全设施一览表;补充、修 改安全带数量4条,液位计选型改为 磁翻板液位计、安全阀、淋洗器改为4 个;补充腐蚀性管道法兰处防喷溅措 施(安装防喷溅罩)。 7 纠正工艺流程简述中的错误叙述内容;补 充项目物料平衡设计数据;反应方程式说明吸 放热。 P11修改了工艺流程错误叙述;P13补 充项目物料平衡表;P12反应方程式补 充吸热内容。 8 设计图纸的凉水塔、消防水等公用工程与 设计叙述内容不一致,需核实纠正其错误;补 充消防水管网设计描述,补充事故污水池的设 计叙述内容;补充项目用电负荷设计;补充硝 酸钠仓库的防雷设计。 总平图设计凉水塔两套;P84补充消防 水管网设计描述;P93对事故污水池设 计进行了叙述;P63对用电负荷进行了 说明;P64防雷设计中补充了硝酸钠仓 库防雷内容。
六年级英语语法知识点汇总
六年级语法总复习 一、词汇 (一)一般过去时态 一般过去时态表示在过去的某个时间发生的动作或存在的状态,常和表示过去的时间状语连用。例如yesterday, last weekend ,last Saturday ,等连用。基本句型:主语+动词的过去式+其他。例句——What did you do last weekend?你上周做什么了? ——I played football last weekend.我踢足球了。 ★规则动词过去式的构成 ⒈一般在动词原形末尾加-ed。例如:play—played ⒉词尾是e的动词直接加-d。例如:dance—danced ⒊末尾只有一个辅音字母的重读闭音节词,先双写这个辅音字母,再加-ed。例如stop(停止)--stopped ⒋结尾是“辅音字母+y”的动词,变“y”为“i”,再加-ed,例如:study--studied ★一些不规则变化的动词过去式 am/is—was are—were go—went swim—swam fly—flew do—did have—had say—said see—saw take—took come—came become—became get—got draw—drew hurt—hurt read—read tell—told will—would eat—ate take—took make—made drink—drank sleep(睡觉)—slept cut(切)--cut sit(坐)—sat begin(开始)—began think—thought find—found run(跑)---ran buy—bought win—won give(给)—gave sing—sang leave—left hear(听)--heart wear—wore (二)一般现在时态 一般现在时态表示包括现在时间在内的一段时间内经常发生的动作或存在的状态,表示习惯性或客观存在的事实和真理。常与often ,always ,usually ,sometimes ,every day等连用。基本句型分为两种情况: ●主语(非第三人称)+动词原形+其他。例句:——What do you usually do on the weekend?——I usually do my homework on the weekend. ●主语(第三人称)+动词的第三人称单数形式+其他。例句: ——What does Sarah usually do on the weekend?萨拉通常在周末干什么? ——She usually does her homework on the weekend.她通常在周末做她的家庭作业。 ★动词第三人称单数形式的变化规则 ⒈一般直接在动词词尾加-s.例如:play—plays ⒉以s ,x ,ch,sh结尾的动词加-es。例如:watch—watches ⒊以辅音字母加y结尾的动词,变y为i,再加es,例如:fly—flies ⒋个别不规则变化动词,需单独记忆,例如:do—does go—goes (三)现在进行时态 现在进行时态表示说话人现在正在进行的动作。基本句型:主语+be+动词的-ing+其他。 例如:——What are you doing ?你在干什么? ——I am doing my homework..我正在做作业。 ★动词现在分词的变化规则 ⒈一般直接在词尾加ing ,例如;wash—washing ⒉以不发音e字母结尾的动词,去掉e ,再加ing.例如:make—making ⒊末尾只有一个辅音字母的重读闭音节词,要双写最后一个辅音字母再加ing.例如swim—swimming (四)一般将来时态 一般将来时态表示将来某一时间或某一段时间内发生的动作或存在的状态。常与表示将来的时间如tomorrow ,next weeken ,this afternoon 等连用。我们通常用will,be going to+动词原形来表示一般将来时态。
l主谓一致讲解最全面主谓一致讲解
主谓一致的讲解 主谓一致是指: 1)语法形式上要一致,即名词单复数形式与谓语要一致。 2)意义上要一致,即主语意义上的单复数要与谓语的单复数形式一致。 一、并列结构作主语时的主谓一致 1.由and 连接主语时 And 连接的两个或多个单数可数名词、不可数名词或代词作主语时根据意义或概念确定谓语用单数或复数 1)并列主语表示不同的人、物或概念时谓语动词用复数 Li Ming and Zhang Hua are good students. Like many others, the little tramp and the naughty boy have rushed there in search of gold. 小流浪汉和调皮的小男孩也赶到那里寻找金子 Both rice and wheat are grown in this area. 2)并列主语表示同一个人、物或概念时,谓语动词用单数形式。 The professor and writer is speaking at the meeting. 那位教授兼作家正在会上发言 A journalist and authour lives on the sixth floor. 一位新闻记者兼作家 His lawyer and former college friend was with him on his trip to Europe. 他的律师兼大学时代的朋友陪他去欧洲旅行 The Premier and Foreign Minister was present at the state banquet. 总理兼外长 比较:the writer and the educator have visited our school. the writer and educator has visited our school. His lawyer and his former college friend were with him on his trip to Europe. 注意:指同一个人或物时,并列主语前只用一个冠词,指不同的需要分别加冠词,但两个名词具有分别的对立的意思时只需要一个冠词即可 A boy and girl are playing tennis. 3)并列主语前有each, every, many a , no 等修饰时谓语动词用单数 Each doctor and (each) nurse working in the hospital was asked to help patients. Every man, woman and child is entitled to take part in the activity. 有权参加 Every boy and (every) girl admires him for his fine sense of humour. Many a boy and (many a ) girl has made the same mistake No boy and no girl is there now.没有任何男孩和女孩在那里 注意:many a 跟单数可数名词但是表示复数意义翻译为很多 Many a student was disappointed after seeing the movie. 4)并列主语为不可分的整体时,谓语动词用单数 A law and rule about protecting environment has been drawn up. 关于保护环境的法律法规已经起草完成。 The knife and fork has been washed 刀叉已经被洗好 War and peace is a constant theme in history 战争与和平是历史永恒的主题 注意;常被视为主体的结构 A cup and saucer 一副杯碟 A horse and cart 马车 A knife and fork 一副刀叉
专家意见模板
先进封装用关键材料球形硅微粉的产业化建设项目 环境影响报告表技术评估会评估意见 武汉新江城环境事务咨询有限责任公司于2011年9月7日在主持召开了《先进封装用关键材料球形硅微粉的产业化建设项目环境影响报告表》(以下简称《报告表》)技术评估会。参加会议的有武汉市环保局东湖新技术开发区分局、、武汉帅尔光电子新材料有限公司(建设单位)、湖北天泰环保工程有限公司(评价单位)等单位的代表共计人。会议邀请位专家(名单附后),负责技术评估。 与会专家和代表踏勘了建设项目厂区及周边环境,会上建设单位和评价单位分别汇报了项目建设的有关情况和《报告表》的主要技术内容,会议经过质询、充分讨论和认真评估,形成以下专家组技术评估意见: 一.项目概况 二.建设内容 三.环保措施及环境影响分析 (1)施工期 (2)运营期 ①废水 ②废气 ③噪声 ④固体废物 ⑤其他影响分析
四.评估结论 项目选址符合武汉市城市规划要求,项目建设符合国家有关产业政策要求。 项目通过环境影响评价,针对该工程实施可能产生的环境问题,提出了相应的污染防治措施,在建设单位确保环保资金投入、严格执行“三同时”制度,全面落实修改完善报批后的《报告表》所确定的各项环保措施,并加强施工期的环境管理工作,将能有效地控制和减缓工程实施可能产生的环境影响。从环境保护角度分析,项目建设可行。 五.《报告表》编制质量 《报告表》编制规范,评价内容较全面。建设项目基本情况、工程建设内容及环境现状阐述较清楚,工程分析基本体现了行业特点,环境保护措施有一定针对性,评价结论总体可信。《报告表》按评估意见进一步修改、完善,并经评估机构出具评估意见后可呈报武汉市环保局东湖新技术开发区分局审批。 六.《报告表》修改、完善时应重点考虑以下问题:
小学英语语法知识点汇总!
小学英语语法知识点汇总! 01 人称代词 主格:I we you she he it they 宾格:me us you her him it them 形容词性物主代词:my our your her his its their 名词性物主代词:mine ours yours hers his its theirs 02 形容词和副词的比较 (1) 一般在形容词或副词后+er older ,taller, longer, stronger (2) 多音节词前+more more interesting, etc. (3) 双写最后一个字母,再+er bigger fatter, etc. (4) 把y变i,再+er heavier, earlier (5) 不规则变化: well-better, much/many-more, etc. 03 可数词的复数形式 Most nouns + s abook –books
Nouns ending in aconsonant +y - y+ ies a story—stories Nouns ending in s,sh, ch or x + es a glass—glasses a watch-watches Nouns ending in o+s or +es a piano—pianos a mango—mangoes Nouns ending in for fe - f or fe +ves a knife –knives a shelf-shelves 04 不可数名词(单复数不变) bread, rice, water ,juice等。 05 缩略形式 I’m= I a,you’re = you are,she’s= she is,he’s = he is it’s= it is,who’s =who is,can’t =can not,isn’t=is not等。 06 a/an a book, a peach an egg,an hour 07 Preposition on, in ,in front of, between, next to, near, beside, at,behind. 表示时间:at six o’clock, at Christmas, at breakfast
高中英语主谓一致知识点讲解
高中英语主谓一致知识点讲解 本文主要讲解主谓一致,并列结构作主语时谓语用复数主谓一致中的靠近原则谓语动词与前面的主语一致 等常见考点。 主谓一致是指: 1)语法形式上要一致,即单复数形式与谓语要一致。 2)意义上要一致,即主语意义上的单复数要与谓语的单复数形式一致。 3)就近原则,即谓语动词的单复形式取决于最靠近它的词语, 一般来说,不可数名词用动词单数,可数名词复数用动词复数。例如: There is much water in the thermos. 但当不可数名词前有表示数量的复数名词时,谓语动词用复数形式。例如: Ten thousand tons of coal were produced last year. 并列结构作主语时谓语用复数,例如: Reading and writing are very important. 读写很重要。 注意:当主语由and连结时,如果它表示一个单一的概念,即指同一人或同一物时,谓语动词用单数,and 此时连接的两个词前只有一个冠词。例如: The iron and steel industry is very important to our life. 钢铁工业对我们的生活有重要意义。 典型例题 The League secretary and monitor ___ asked to make a speech at the meeting. A. is B. was C. are D. were 答案B. 注:先从时态上考虑。这是过去发生的事情应用过去时,先排除A.,C。本题易误选D,因为The League secretary and monitor 好象是两个人,但仔细辨别,monitor 前没有the,在英语中,当一人兼数职时只在第一个职务前加定冠词。后面的职务用and 相连。这样本题主语为一个人,所以应选B。
用修改符号修改下面一段话
用修改符号修改下面一段话。 1、我家的小书厨中陈列着一排排崭新的图书,有水浒传、西游记等古典名作。我对他们很感兴趣,多读优秀的课外书可以丰富和提高我们的知识,所以我养成了每天读课外读物的习惯。 2、王老师工作勤勤恳恳,任劳任怨,生活上艰苦朴素,他对同学们和蔼可亲,从不发火,既然有的同学做错了事,她就能耐心的教育。有一次,我经常看见她疼的满头大汗,可他任然坚持给我们上课。同学们都非常孝敬她。 3、西游记是我国古典小说的四大名著,在世界文化史上享有盛名,书中塑造了唐僧,悟空和众多人物形象,内容生动有趣,让人爱不失手。【标点2处,错别字2处,语病2处】 4、在老师和同学们的帮助教育下,刘强端正了学习态度。能按时完成作业,错别字也大大进步了,他还积极参加文郁活动,在全校师生和少先队们参加的儿童节联欢晚会上扮演节目,有详有略地朗读了作者是著名作家鲁迅写的“草原”。 5、“哈利·波特”这本书写得深动形象,我很早就想看。今天终于借到了,我非常高兴极了。一放学,我就迫不及待的拿起书,坐在座位上读了起来。读了这本书,我受到不少启发。我要向哈利·波特那样,敢于向邪恶势力挑战的好思想。 6、阅览课上,我们讨论并阅读了“海伦.凯勒传”,感触很多。谁能相信一个不但看不见而且听不见的女子能掌握法、德等五种英语呢?谁能相信她果然能取得那么多惊人的成就呢?作为一个身体健全的人,我们有什么理由不珍惜呢? 7、小红在学习克苦努力,所以常常受到老师表扬他。老师向同学们介绍了许多小红的事迹,使同学们启发教育。 8、我非常喜欢酷爱书法,无论是刚劲有力的大字还是清秀玲珑的小楷。我对它们都有特殊的感情。炼笔挥毫已成为我生命中必不可少的内容。家里人都希望我能在这方面有所长进。我决不辜负他们的愿望。 9、不知什么时候,天空部满黑色的乌云。屋旁的小树在大风中轻轻摇曳。张大爷望望天空,断定可能要下雨,就一袋一袋立即地把粮食往家里扛。 10、毕业连欢晚会上,同学们表演的美好节目,被大家吸引住了。刘明表演单人舞忧美,张林表演小提琴独奏,非常动听。最后同学们心情歌唱,欢乐的歌声在教室里回声。 11、下午放学以后,王红想去参加展览。在路上,他发明了一个鼓鼓的钱包。怎么办呢!他放开了看展览的念头,决心根据钱包里的工作证上的单位地址去找失主,到了单位,天快要已经黑了,失主以经下班走了。他问清了哪位同志
初三英语语法知识点归纳
初中英语语法速记口诀大全 很多同学认为语法枯燥难学,其实只要用心并采用适当的学习方法,我们就可以愉快地学会英语,掌握语法规则。笔者根据有关书目和多年教学经验,搜集、组编了以下语法口诀,希望对即将参加中考的同学们有所帮助。 一、冠词基本用法 【速记口诀】 名词是秃子,常要戴帽子, 可数名词单,须用a或an, 辅音前用a,an在元音前, 若为特指时,则须用定冠, 复数不可数,泛指the不见, 碰到代词时,冠词均不现。 【妙语诠释】冠词是中考必考的语法知识之一,也是中考考查的主要对象。以上口诀包括的意思有:①名词在一般情况下不单用,常常要和冠词连用;②表示不确指的可数名词单数前要用不定冠词a或an,确指时要用定冠词the;③如复数名词表示泛指,名词前有this,these,my,some等时就不用冠词。 二、名词单数变复数规则 【速记口诀】 单数变复数,规则要记住, 一般加s,特殊有几处: 末尾字母o,大多加s, 两人有两菜,es不离口, 词尾f、fe,s前有v和e; 没有规则词,必须单独记。 【妙语诠释】①大部分单数可数名词变为复数要加s,但如果单词以/t?蘩/、/?蘩/、/s/发音结尾(也就是单词如果以ch,sh,s,x等结尾),则一般加es;②以o结尾的单词除了两人(negro,hero)两菜(tomato,potato) 加es外,其余一般加s;③以f或fe结尾的单词一般是把f,fe变为ve再加s;④英语中还有些单词没有规则,需要特殊记忆,如child—children,mouse—mice,deer—deer,sheep—sheep,Chinese—Chinese,ox—oxen,man—men,woman—women,foot—feet,tooth —teeth。 三、名词所有格用法 【速记口诀】 名词所有格,表物是“谁的”, 若为生命词,加“’s”即可行, 词尾有s,仅把逗号择; 并列名词后,各自和共有, 前者分别加,后者最后加; 若为无生命词,of所有格, 前后须倒置,此是硬规则。 【妙语诠释】①有生命的名词所有格一般加s,但如果名词以s结尾,则只加“’”;②并列名词所有格表示各自所有时,分别加“’s”,如果是共有,则只在最后名词加“’s”;③
(完整版)主谓一致讲解教案
主谓一致讲解教案 一、授课时间:2012年1月4日 二、授课内容:语法点主谓一致讲解 三、授课重难点: 1、授课重点:主谓一致三原则:语法一致;意义一致;就近一致原则 2、授课难点:主谓一致常考题型 四:授课过程 Step I 课程引入 由三个例句导入主谓一致的概念 1.I am a student. 2.They are students. 3.She is a teacher. 我们可以看出主语不同,谓语动词的形式就不同 主谓一致:谓语动词的人称和数随着主语的人称和数的变化而变化。 Step II 讲述 一、主谓一致遵循三个原则:语法一致;意义一致;就近一致原则 分别对每个原则中的每一项进行讲解,并且举出例句,和学生互动。 1.语法一致原则:指主语是单数形式,谓语动词用单数形式,主语是复数形式,谓语也用复数形式。 Tom is a good student. 汤姆是个好学生。 They often play football on the playground. 他们经常在操场上踢足球。 2.意义一致:指主语形式上为单数,但意义为复数,因此谓语动词用复数形式;或主语形式上为复数,但表示单数意义,这是谓语动词用单数形式。 My family are having lunch now. 我们一家人现在正吃午饭。 Twenty dollars is too expensive for the book. 这本书20美元太贵了。 3.就近一致:指谓语动词用单数形式还是用复数形式,取决于最靠近他的主语。例如: Not only the teacher but also his students like playing football. 不仅老师喜欢踢足球,而且他的学生也喜欢踢足球。 There is a pen and some books on the desk. 课桌上有一支钢笔和一些书。
用修改符号修改下面三段话
用修改符号修改下面三段话 1、那孩子抬起一个贝壳看看,随手就把它舍弃了。他已经寻找了一个下午,始终没有找到他心目中最美妙,最新奇的贝壳。沙滩上撒满了闪光的贝壳,像是掉了一地的繁星。夕阳把海和天染成了一片深深的浅紫色,他的友伴们快乐地哼着忧伤的歌儿,提着满满一蓝子贝壳。只有他仍然孤独地拖着长长的人的影子,在海滩茫然四顾。 2、今天是植树节。早晨七点多钟不到,大家就连续来到街心花圆。嗬,来的人真不少!有青年人、老年人、中年人、小伙子、还有很多小学生呢!我头带着草帽,肩扛着铁锹也来到中间他们参加劳动了。 3、我们的祖国是世界四大文明古国,“首都”北京更是一座历史悠久的城市。这里名胜古迹很多,每年吸引众多的游客来参观。 按要求写句子。 1、人与山的关系日益密切,使我们感到亲切、舒服。 改为反问句:___________________________________________________ 2、没有人不说蔺相如是个机智勇敢、顾全大局的英雄。 改为肯定句:___________________________________________________ 3、黄继光对指导员说:“请把任务交给我。” 改为第三人称转述句:______________________________________________ 4、1905年,清政府任命詹天佑为总工程师。 改为“被”字句:____________________________________________________ 八、按要求写诗句。(14分) 1.有时候,有些人对自己所处的环境、正在做的事反而不及旁人看得清楚,这就是人们常说的“当局者迷,旁观者清”。宋代大诗人_____________在《__________________》中的诗句“_____________________,_____________________”说明了这个朴素而深刻的道理。 2.春雨,古今中外多少人赞美你。“_____________________,_____________________”这是大诗人杜甫描绘你的佳句。 3.“_____________________,_____________________。”是呀,不抓住今天,永远期盼着明天,幸福会向你招手吗? 4.小明成天心思不在学习上,清你用学过的诗句劝他: 。 5.当我们要报答母亲的深恩时,我们会很自然地吟诵起唐代诗人孟郊的《游子吟》中的千古佳
用修改符号修改作文
《用修改符号修改作文》教学设计: 用符号改作文 岳阳市君山学校王则君教学理念: 修改文章是提高写作能力的重要方法; 修改文章能培养自己的责任心。 懂得四种基本的修改符号和修改方法。初步学会用符号修改自己作文中的病句。 教学目标: 懂得四种基本的修改符号和修改方法;初步学会用符号修改指定的一段话。 教学重、难点: 懂得四种基本的修改符号和修改方法。 教具准备:投影。课件等 教学时间:一课时或两课时 教学过程: 一、当医生,找病因,动手术.。(出示课件) 1、爱迪生发现了电灯。 (词义混淆。因对词义概念理解模糊而选用词不当的语病。如:把“发现”和“发明”两词混淆。) 2、今天气候晴朗。 (词类误用。因分不清词类而造成用词不当的语病。如:。把“气候”与“天气”混淆了。)3、在老师的教育下,进步得很快。 成份残缺。句子缺少不应该省略的主要成份。造成句子结构不完整的语病。 4、我的家乡是君山人。 (搭配不当。因句子中相关的成份之间互相不能搭配而造成的病句。) 5 在班队会上,张军首先第一个发言。 (重复累赘。过多地动用修饰词语反而显得多余。) 6、老师的办公桌上放着一叠厚厚的考卷。 (词序颠倒。考卷没有厚薄之分,显然是把一叠与厚厚的词序颠倒了。) 7、只要我细心就能画很跟加好。 (字写错了,没打好标点。) 二、认识修改符号: 显然我们现在修改病句的方法是不方便的,为了便于大家在写作文时便于修改,今天我们来学习几种修改符号。 1、出示符号:删补换调 2、让学生认一认符号,试着画一画 3、说一说每一种符号的意思,再说一说每一种符号有什么作用? 4、试着用这些符号改改上面几个病句。看看使用了哪些修改符号。 5、让学生比较开始的修改方法,说说那种修改方法好。 三、小结 这节课我们共学了四种修改符号,一起回忆。 四:讲故事,调节气氛。 1 老师今天跟大家讲个故事,好吗?
英语语法知识详解
高中英语语法知识表解 一.名词 I. 名词的种类: 1. 规则名词的复数形式: 名词的复数形式,一般在单数形式后面加-s或-es。现将构成方法与读音规则列表如下: 英语里有些名词的复数形式是不规则的,现归纳如下:
名词在句中表示所有关系的语法形式叫做名词所有格。所有格分两种:一是名词词尾加’s构成,二是由介词of加名词构成。前者多表示有生命的东西,后者多表示无生命的东西。 1. ’s所有格的构成:
用于无生命的东西:the legs of the chair, the cover of the book 用于有生命的东西,尤其是有较长定语时:the classrooms of the first-year students 用于名词化的词:the struggle of the oppressed 二.冠词 冠词分为不定冠词(a, an),定冠词(the),和零冠词。 I. 不定冠词的用法:
三.代词: I. 代词可以分为以下七大类:
1. one, some与any: 1) one可以泛指任何人,也可特指,复数为ones。some多用于肯定句,any多用于疑问句和否定句。One should learn to think of others. Have you any bookmarks? No, I don’t have any bookmarks. I have some questions to ask. 2) some可用于疑问句中,表示盼望得到肯定的答复,或者表示建议,请求等。 Would you like some bananas? Could you give me some money? 3) some 和any修饰可数名词单数时,some表示某个,any表示任何一个。 I have read this article in some magazine. Please correct the mistakes, if any. 4) some和数词连用表示“大约”,any可与比较级连用表示程度。 There are some 3,000 students in this school. Do you feel any better today? 2. each和every: each强调个别,代表的数可以是两个或两个以上, 而every强调整体,所指的数必须是三个或三个以上。 Each student has a pocket dictionary. / Each (of us) has a dictionary. / We each have a dictionary. Every student has strong and weak points. / Every one of us has strong and weak points. 3. none和no: no等于not any,作定语。 none作主语或宾语,代替不可数名词,谓语用单数,代替可数名词,谓语单复数皆可以。 There is no water in the bottle. How much water is there in the bottle? None. None of the students are (is) afraid of difficulties. 4. other和another: 1) other泛指“另外的,别的”常与其他词连用,如:the other day, every other week, some other reason, no other way, the other特指两者中的另外一个,复数为the others。如: He held a book in one hand and his notes in the other. Two students in our class failed, but all the others passed the exam. 2) another指“又一个,另一个”无所指,复数形式是others,泛指“别的人或事”如: I don’t like this shirt, please show me another (one). The trousers are too long, please give me another pair / some others. Some like football, while others like basketball. 5. all和both, neither和either
英语主谓一致详解
英语主谓一致详解 1. 代词做主语 A.主语是he, she, it, either, neither, each, one, the other, another, anything, anyone, some thing, someone, somebody, everybody, everyone, everything, nobody, no one, nothing等代词时,谓语动词用第三人称单数形式。如: (1)Somebody is asking for you. 有人在找你。 (2)Everyone is here. 大家都来了。 (3)There is something wrong with my bike. 没有的单车有点毛病。 B.主语是I(除be 动词用am外) , you, we, they代词时,谓语动词用第三人称复数形式。如: (1)I like to stay here with you. 我喜欢跟你在这儿。 (2)They are all soldiers. 他们都是战士。 (3)We play football after school. 我们放学后踢足球。 C.主语是:who, what, which, all, more, most, some, any, none, the rest, the remainder 时,谓语动词的形式须依具体情况而定。如: (1)Who’s the girl over there? 那边的那个女孩是谁? (2)Who are the boys playing games there? 在那里做游戏的男孩子是哪些人? (3)What’s this? 这是什么? (4)What are those? 哪些是什么? (5)Which is yours? 哪一个是你的? (6)Which are children’s? 哪一些是孩子们的? 2. 名词做主语 A.一般说来,不可数名词及可数名词的单数做主语时,谓语动词用第三人称单数形式。如: (1)Water is necessary for living things. 水对于生物来说是必须的。 (2)The desk over there is Li Lei’s. 那边的那张课桌是李蕾的。 (3)The dog is a useful animal. 狗是一种有用的动物。 B.表示总称意义的名词people (人们,人民), cattle, police,youth做主语时,谓语动词用第三人称复数形式。如: (1)English people are fond of talking about weather. 英国人喜欢谈论天气。