帕雷托优化方法
采用多目标一致性遗传多样性算法(MUGA)的五自由度车辆振动模型的帕雷托优化
摘要
对于五自由度车辆振动模型的帕雷托优化问题,本文提出了一种新的多目标一致性遗传多样性算法,它具有用来保持多样性的ε-消除算法,并且同时考虑了五个相互矛盾的目标函数。这五个目标函数分别是座椅加速度,前轮速度,后轮速度,悬挂质量和前轮的相对位移和悬挂质量与后轮的相对位移。其次,在两目标优化过程中,选取了不同分组的成对目标函数。通过将本文所得结果与文献中的优化结果进行比较,证实了本文所述方法的优越性。研究表明,五目标的优化结果涵盖了两目标的优化结果,因此,给车辆振动模型的最优设计提供了更多的方法选择。
关键词:车辆振动模型,帕雷托,遗传算法,多目标优化多样性,MUGA
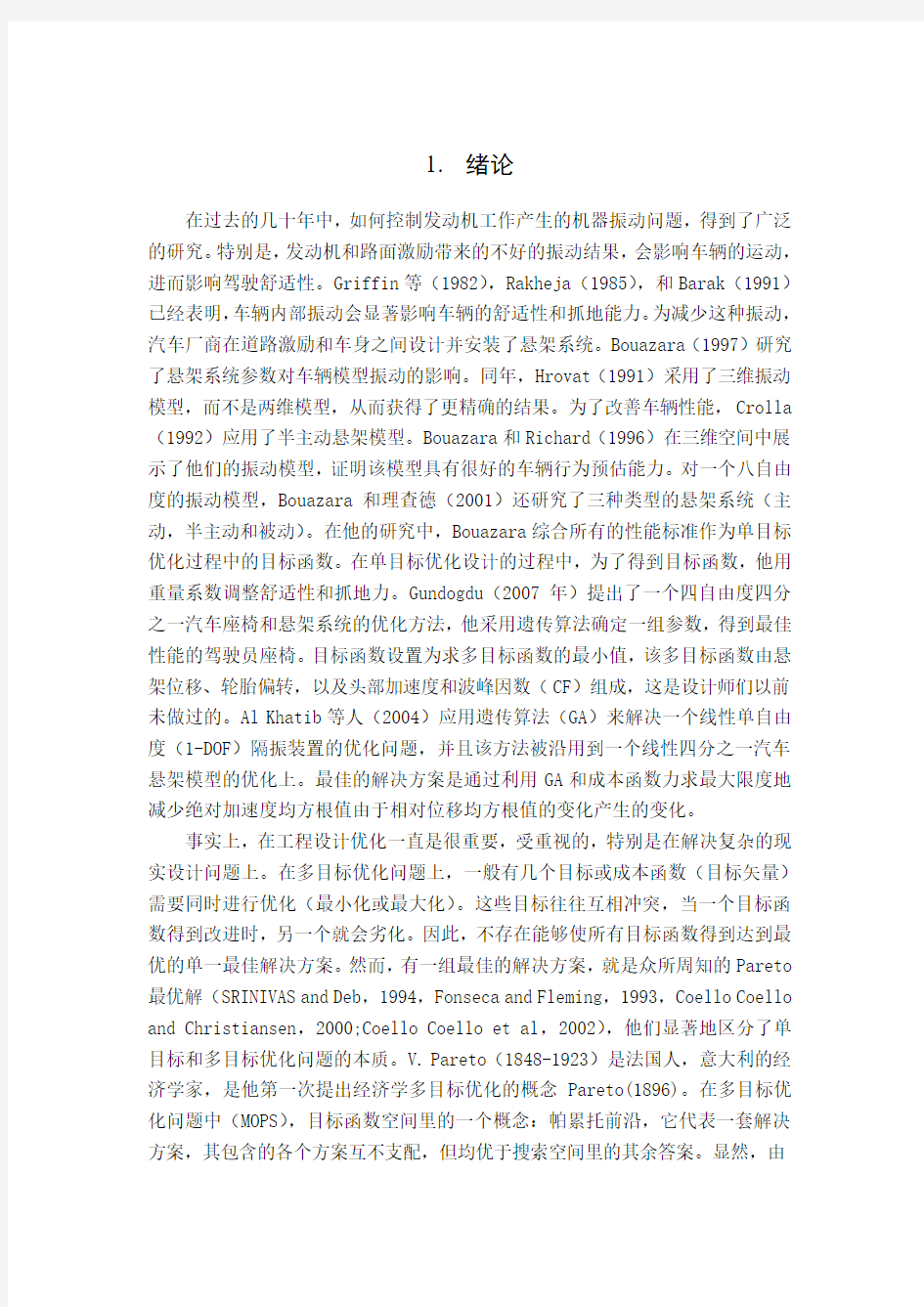
1.绪论
在过去的几十年中,如何控制发动机工作产生的机器振动问题,得到了广泛的研究。特别是,发动机和路面激励带来的不好的振动结果,会影响车辆的运动,进而影响驾驶舒适性。Griffin等(1982),Rakheja(1985),和Barak(1991)已经表明,车辆内部振动会显著影响车辆的舒适性和抓地能力。为减少这种振动,汽车厂商在道路激励和车身之间设计并安装了悬架系统。Bouazara(1997)研究了悬架系统参数对车辆模型振动的影响。同年,Hrovat(1991)采用了三维振动模型,而不是两维模型,从而获得了更精确的结果。为了改善车辆性能,Crolla (1992)应用了半主动悬架模型。Bouazara和Richard(1996)在三维空间中展示了他们的振动模型,证明该模型具有很好的车辆行为预估能力。对一个八自由度的振动模型,Bouazara和理查德(2001)还研究了三种类型的悬架系统(主动,半主动和被动)。在他的研究中,Bouazara综合所有的性能标准作为单目标优化过程中的目标函数。在单目标优化设计的过程中,为了得到目标函数,他用重量系数调整舒适性和抓地力。Gundogdu(2007年)提出了一个四自由度四分之一汽车座椅和悬架系统的优化方法,他采用遗传算法确定一组参数,得到最佳性能的驾驶员座椅。目标函数设置为求多目标函数的最小值,该多目标函数由悬架位移、轮胎偏转,以及头部加速度和波峰因数(CF)组成,这是设计师们以前未做过的。Al Khatib等人(2004)应用遗传算法(GA)来解决一个线性单自由度(1-DOF)隔振装置的优化问题,并且该方法被沿用到一个线性四分之一汽车悬架模型的优化上。最佳的解决方案是通过利用GA和成本函数力求最大限度地减少绝对加速度均方根值由于相对位移均方根值的变化产生的变化。
事实上,在工程设计优化一直是很重要,受重视的,特别是在解决复杂的现实设计问题上。在多目标优化问题上,一般有几个目标或成本函数(目标矢量)需要同时进行优化(最小化或最大化)。这些目标往往互相冲突,当一个目标函数得到改进时,另一个就会劣化。因此,不存在能够使所有目标函数得到达到最优的单一最佳解决方案。然而,有一组最佳的解决方案,就是众所周知的Pareto 最优解(SRINIVAS and Deb,1994,Fonseca and Fleming,1993,Coello Coello and Christiansen,2000;Coello Coello et al,2002),他们显著地区分了单目标和多目标优化问题的本质。V. Pareto(1848-1923)是法国人,意大利的经济学家,是他第一次提出经济学多目标优化的概念Pareto(1896)。在多目标优化问题中(MOPS),目标函数空间里的一个概念:帕累托前沿,它代表一套解决方案,其包含的各个方案互不支配,但均优于搜索空间里的其余答案。显然,由
于在这样的Pareto最优解,它包括这些解决方案不会互相支配,所以改变设计变量的矢量,并不能使所有目标同时改进。因此,这样的变化会导致至少一个目标变差成为劣解。因此,帕累托集中的每个解决方案至少有一个目标劣于在这个帕累托集中的另一个解决方案,即使它们都优于搜索空间的其余解决方案。进化算法内部的对应关系使其能够解决多目标优化问题。最早对进化搜索的使用进行报道的是Rosenberg在20世纪60年代进行的。自那时以来,研究人员越来越有兴趣于通过制定不同的进化算法来解决多目标优化问题。在这些方法中,Schaffer (1985)提出的矢量评估遗传算法(VEGA),Fonseca and Fleming(1993年)提出的Fonseca and Fleming’s遗传算法(FFGA),Srinivas、Deb (1994)提出的非支配排序遗传算法(NSGA)和Zitzler、Thiele(1998)提出的强度帕累托进化算法(SPEA)和Knowles、Corne(1999)提出的帕累托归档进化策略(PAES)都是最重要的。对于这些方法的优劣,Coello Coello,1999和Khare等人(2003),给出了一个很好的和全面的调查报告。Coello Coello在https://www.360docs.net/doc/b416994249.html,nia.mx/ ccoello/ EMOO/上基于互联网展示了许多相关论文集合,这些文献资源使这些方法更为容易理解。大体上,基于帕累托方法的NSGA和FFGA都使用了由Gold-berg (1989)最早提出的进化非支配排序策略。在这样的进化多目标优化方法中,有两个重要的问题需要考虑:不断向帕雷托最优系列或其前端进行搜索;避免过早收敛或在种群之中保持基因的多样性Toffolo和Benini(2003)。主导方法的缺失推动了非支配排序算法的改善Goldberg(1989),其中使用了直接精英原理取代原来的共享原理,来提高种群多样性。这种改良的算法体现了多目标优化问题的最高水准Coello Coello and Becerra(2003)。通过一些问题的研究和测试,比较SPEA和其他进化算法,会发现SPEA明显优于其他多目标进化算法(Zitzler 等人,2000)。一些发表文献(Toffolo and Benini,2003)的深入研究却证实,NSGA(NSGA-II)的精英变种与SPEA的性能相等。
在本文中,对于五自由度的车辆模型多目标优化问题,采用了一种新的多目标一致遗传多样性算法(MUGA),该算法中包含了所谓多样性保护机制的ε-消除消除算法。需要进行最小化的目标函数是座椅加速度,前轮速度,后轮速度,悬挂质量和前轮的相对位移(d1)和悬挂质量与后轮的相对位移(d2)。振动优化中所使用的设计变量是座椅阻尼系数(Css),悬架阻尼系数(Cs1和Cs2),座椅刚度系数(Kss),悬架刚度系数(Ks1和Ks2),以及座椅相对于质心的位置。文中使用了成对的两个目标优化过程和五个目标优化过程。五个目标的优化是借由帕雷托前沿的叠加图,而使用不同的两个目标优化过程实现的。显然,通过多目标优化过程得到的帕雷托前沿叠加图可以证实平衡情况下的最有设计。与文献中的其他方法相比,此方法中这些设计点的时域振动特性表现更好。
2. 帕雷托多目标优化
多目标优化,这也叫多标准优化或向量的优化,它的定义:满足约束的条件下,寻找一个决定性变量的向量,使其对于所有的目标函数,都能给出合理的值(Coello Coello and Christiansen,2000;Jamali et al,2010)。在一般情况下,它可以数学定义为找到一个矢量去优化
(1)
使其满足m个不等式约束条件
(2)
以及p个等式约束条件
(3)
其中,是决定或设计变量的矢量,是要么最大要么最小的目标函数的矢量。一般,假设所有的目标函数都要求最小。这种基于帕雷托方法的多目标最小化问题可以使用这些定义来表述。
2.1. 帕雷托支配的定义
矢量支配矢量(记为),
当且仅当换句话来说就是,当余下的us要么小于或等于相应的vs时,至少存在一个uj比vj小。
2.2. 帕雷托最优的定义
对于点(在的可行域中,且满足等式(2)和(3))相对于所有的是帕雷托最优点(最小),当且仅当。或者,也可以表述为
。换句话来说,根据帕雷托支配的定义,如果没有其他点可以支配,那么就是帕
雷托最优点(最小)。
2.3. 帕雷托集的定义
对于一个给定的多目标优化问题,一个帕雷托集就是包含所有帕雷托最
优向量的设计变量的集合。换句话说就是,在中没有一个设计变量的矢量可以支配任意的。
对于给定的多目标优化问题,帕雷托前沿是一个目标函数向量的集合,
通过帕雷托集合中的设计变量可以得到。即
。换句话来说就是,帕雷托前沿是由
映射得到的目标函数的集合。
由于进化算法自身属性适用于多目标优化问题,所以在这一类问题上被广泛使用。这可能主要是因为它的并行或基于群体的搜索方法。因此,在解决多目标优化问题时,这一经典算法中的许多难点和缺陷都被忽略不计。例如,不必再多次运行来寻找帕雷托前沿,或者用权衡值来决定每个目标的重要性。通过这种方式,原来Goldberg Goldberg(1989)提出的非支配性排序过程就成为了不同版本的优化算法的催化剂(Srinivas and Deb,1994;Fonseca and Fleming,1993)。然而,非常重要的一点是,要充分保证种群中的基因多样性。在多目标遗传算法中,这一点在许多相关文献作品中经常被提及Toffolo and Benini (2003)。如果这种基因多样性能够被很好地保存下来,那么多目标优化问题中的过早收敛就可以及时避免,而最终结果也会依照帕雷托前沿成为定向的。基于帕雷托方法的NSGA-ⅡDebet al.(2002)在工程多目标优化问题中得到广泛使用,这主要得益于在帕雷托前沿产生分级时,它具有简单而有效的非支配分级过程。但是,在先进的多目标遗传算法中Coello Coello and Becerra(2003),这种繁琐的方法就保持多样性方面并不有效,尤其是当问题中有2个以上的目标函数时(Nariman-Zadeh et al., 2005; Jamali et al.,2010)。
此篇文章中,提出了一种叫做MUGA的多目标统一遗传多样性算法,它可以适用于具有很多目标函数(尤其是2个目标以上)的多目标优化问题。
2.5. 多目标统一遗传多样性算法(MUGA)
多目标统一遗传多样性算法(MUGA)使用非支配排序机制以及ε-消除消除多样性保留算法来更为精确地得到多目标优化问题中的帕雷托最优解。
2.5.1. 非支配排序方法
非支配解的排序理念起源于Goldberg(1989),经常被用于不同的进化多目标优化算法,NSGA-ⅡDeb et al.(2002)中就有使用。这种算法拿种群中的每个个体与其他的进行比较,从而判定其非支配性。一旦发现第一个前沿,它的所有的非支配个体将会从种群中移出,对于次一级前沿,此过程不断重复,直到所有的种群都得到排序,分到不同的前沿中。
组建前沿的排序过程可以通过比较种群中的所有个体而轻易得到,包括前沿中的非支配个体。这一过程的具体步骤如下:
1.得到种群(pop)
2.将第一个个体作为前沿中的,使;
3.将种群中的其他个体与中的做
比较;
如果,则用代替
如果,,继续比较;
否则,把归入,,继续比较;
4.前沿结束。
显而易见,中的非支配解的数量一直增加,直到不再发现新的解。在这个过程中,所有发现的非支配个体都从主要种群中被转移出来,然后发现另一个前沿的过程可能被再次完成。这个过程一直重复,直到所有的种群都被分到不同的前沿中。需要注意的是,最终一代的第一级前沿组成了多目标优化问题的帕雷托最优解。
2.5.2. ε-消除消除多样性保持方法
ε-消除消除多样性方法代替了NSGA-ⅡDeb et al.(2002)的距离配制方法,在这一方法中,所有的翻版和ε-相似个体都会被识别并且从种群中剔除。因此,基于ε的一个值作为消除临界值,一个前沿中的所有个体,符合限制条件的个体都被消除。应该注意的是,这种ε-相似个体同时存在于目标空间以及与之相关的设计变量空间。这将保证在设计变量中非常不同而在目标空间中有ε-相似的个体,不会被消除。图1就是ε-消除方法的伪码。显然,翻版和ε-相似个
图1 ε-消除算法伪码
体都会被任意产生的新的具有相同号码的个体取代。同时,这将有助于更有效地对所给的多目标优化问题空间进行搜索。当前沿而非整个种群缩短为ε-相似个
体时,这种替代将不会发生。
2.5.
3. MUGA的主要算法
MUGA的主要算法使用了非支配排序策略和ε-消除多样性保持方法(见图2)。图2首先随机产生一个种群。使用基因运算,产生相同大小的种群。基于ε-消除算法,整个种群通过移出ε-相似个体而缩减。这一阶段,种群通过随机产生的个体,被再次充实,这将有助于更有效地对所给的多目标优化问题空间进行搜索。然后,整个种群通过非支配排序过程进行排序。得到的前沿被用来组成主要种群。必须注意的是,缩减为与种群大小相符的前沿,也要被ε-消除过程评估,以辨别ε-相似个体。这一过程要保证与种群大小误差为+10%,以避免种群大小调节的过度计算差。最后,第一等级前沿的个体数量在一定代数之间变化,否则随机产生的个体就要不时地插入主要种群中(例如,每20代具有不区分第一等级前沿)。
图2 MUGA主要算法
3. 车辆振动模型的多目标优化
图3为参照(Bouazara (1997))的装有被动悬架的五自由度车辆模型。该模型由一个簧载质量和与它连接的三个非簧载质量(即轮胎和座椅)组成。此外,考虑自由度结果、线性运动(簧载和非簧载质量的垂直运动)以及簧载质量转动(俯仰运动),与加速度,速度和运动之间的关系,写出运动方程。参数有
,它们分别代表车辆固有参数前轮质量,后轮质量,座椅质量,簧载质量,簧载质量惯性矩,前轮刚度系数,后轮刚度系数,前后轮相对于质心的位置。设计变量有和以及和,它们分别
图3 Bouazara (1997)被动悬架五自由度车辆振动模型
表示座椅刚度系数、悬架刚度系数、座椅阻尼系数、悬架阻尼系数、座椅相对于质心的位置。此外,下标的1和2代表前后轴。在这一例子中需要关注的是,座椅是由线性弹簧和减震器组成。图4为二次冲击激励产生的动态模型。
图4 二次冲击激励(displacement:位移)
表1
模型固定参数值
3.1. 动态运动微分方程管理
根据牛顿欧拉方程,可以列出关于自由度、小角度的线性运动微分方程,如下:
其中和分别代表座椅垂直位移、簧载质量重心的垂直位移、簧载质量末端的垂直位移以及转动(俯仰运动)。另外,和代表座椅垂直速度,轮
胎垂直速度和簧载质量末端垂直速度。和分别代表座椅垂直加速度,悬挂质量的重心的垂直加速度,轮胎垂直加速度和旋转加速度(俯仰加速度)。最后,和分别表示如图4中所示的来自路面的二次冲击激励。
假设车辆以恒定的速度通过二次冲击,且后轮与前轮的轨迹相同,
仅存在一个时间延迟。需要输入的固定参数的值见表1Bouazara (1997)。
文中,
是基于座椅
加速度、前轮速度、后轮速度、簧载质量与前轮相对位移(d1)、簧载质量与后轮相对位移(d2)这五个不同的目标所给出的七个设计变量。
本文建议优化点参考文献[32]建议优化点
图5 两目标优化中的座椅加速度和前轮速度的帕累托前沿
本文建议优化点参考文献[32]建议优化点
图6两目标优化中的座椅加速度和后轮速度的帕累托前沿本文建议优化点参考文献[32]建议优化点
图7两目标优化中的簧载质量和前轮之间的相对位移的帕累托前沿本文建议优化点参考文献[32]建议优化点
图8两目标优化中的簧载质量和后轮之间的相对位移的帕累托前沿
3.2. 车辆振动模型的两目标优化
在本节中,在以前的部分,多目标一致遗传多样性算法(MUGA)(Jamali et al.,2010)提出并被用于车辆模型的多目标设计如图4。为此,在不同的2目标优化的过程,对5个目标的10个可能分组要考虑4组不同的组合。这种目标优化分组为和,分别代表座位加速度和前轮速度、后轮速度,簧载质量和前轮之间的相对位移以及簧载质量和后轮之间的相对位移。在这套目标函数中,很明显地可以观察到所有的目标函数的最小化。80个个体的种群,0.9的交叉概率和0.1的变异概率,被用于240代。通过图5-8,可以看出每一对选择的两目标的帕累托前沿。它很清楚的表明,一个目标变得更好的情况下,通常会造成另一个目标变得更糟糕。然而,如果选择的一组设计变量都是基于每个帕累托前沿,就会得到该对目标的最佳组合方式。换句话说,如果选择任何其他组设计变量,目标的对应值将给出一点,改点肯定比相应的帕雷托前沿差。图5-8目标函数中这样的劣质区存在于上顶部/右两处。
图5描绘了座椅加速度和前轮速度的帕累托前沿,给出了对于互相矛盾的目标,其不同的非支配最优点。在这张图,点A和B1分别代表最佳座椅加速度和最好前轮速度。应当注意的是,在帕累托前沿中,所有的最优设计点是不占支配地位并且可以由设计者进行选择的。这张图清楚地表明,在这些帕累托前沿中,任何目标函数选择一个更好的值,就会导致另一个目标函数变成更差的值。显然,在帕雷托前沿中,可以容易地观察到,在这些这些目标函数中,有一些重要的优化设计事实。图 5,点C1是一个重要的优化设计事实。本文中得到的优化设计点C1与B1点比较,表现出前轮速度小幅增长(最小前轮速度),而其座椅加速度提高13%。事实上,如果不使用本文提出的帕累托最优的方法,就不会得到平衡设计点C1。
图6-8显示了其他目标函数非主导帕累托前沿。设计点A具有最好的座椅加速度,而点B2,B3和B4分别具有最好的和。同理,平衡设计点C2,C3和C4都是重要的优化设计的事实。图6-8,细致观察可以发现,从点B2到C2,B3到C3以及B4到C4,座椅加速度的值分别提高约18%,9%和20%,而其他目标函数则少量增加。在这些数据中,D点表示得到的最佳设计Bouazara(1997),它非常显然会显著地被所有帕累托前沿支配。
图9-12,在时域中,对这些数据中的平衡点和一个最佳设计点Bouazara(1997)的加速度表现进行了比较。从图中明显可以发现,本文中得到设计点的座椅加速度值比D Bouazara(1997)中给出的最优设计点的值更好。表2还给出了这些最有设计点相应的目标函数和设计变量的值,以及Bouazara(1997)优化后的一点。
本文的帕累托最优的方法揭示了一些有趣和翔实的设计工作,但是如果没有
座椅加速度,前轮速度,后轮速度,悬挂描绘了在平面中的五目标优化中的非支配个体以及前面章节
的和平面中得到展示。应当指出的是,有一个单一的个体集合,其中是显示在不同的平面上的五目标、、、
以接受的,但目前还不能证明,帕雷托前沿(例如平面)中存在这样的一个最佳设计点同时也存在于其他的帕雷托前沿(例如平面)内。
在平面上,
但很显然,从点D到F,d1小幅增加时,提高约42%。图17给出了本文最佳点和Bouazara(1997)给出的最佳点的座椅加速度的时域响应。显然,点F的时域响应优于点D的响应。表2中给出了目标函数及其相关设计变量的数值。比较从五目标函数优化过程获得的优化设计点F的相关目标函数值,与两目标函数的优化过程中表2给出的设计点C1,C2和C3的相关目标函数值,可以证实设计点F的相对优势.
因此,对于座椅加速度,前轮速度,后轮速度,悬挂质量和前轮的相对位移(d1)和悬挂质量与后轮的相对位移(d2)这样的多目标优化,给出了基于帕雷托非支配点的设计变量的最优选择。
本文得到的最优设计点的时域响应文献[32] 得到的最优设计点的时域响应
图17 点F和D的座椅加速度时域响应
4. 结论
多目标遗传算法与最近开发的多样性保持机制已被用于车辆振动模型的优化设计。将彼此互相矛盾的目标函数,确定为座椅加速度,前轮速度,后轮速度,悬挂质量和前轮的相对位移(d1)和悬挂质量与后轮的相对位移(d2)。车辆模型的多目标优化,是在这些目标函数中找到一些重要的平衡。与文献给出的优化点相比较,本文中所得到的最优设计点具有一定的优势。车辆模型的这种多目标优化能揭开相互矛盾的目标之间的设计平衡,这种平衡是以前以及别的方法无法实现的。另外,研究表明,就帕雷托前沿而言,五目标优化的结果包括那些两目标优化的结果,并且,为最优设计提供更多的方法选择。
(参考文献略)
最优化方法简明教程—centre
①图与网 破圈法:任取一个圈,去掉一条权最大的边,直到最小树。 避圈法:选最小权的边,避圈前进,直到最小树。 最短路算法: Dijkstra法:从V s给定P标号T标号λ标号(T标号变为P标号λ标号记位置) 反向追踪:列表,d1(V1,V j)→d k(V1,V j)=min(ωij+d k(V1,V i))据最小权反向追踪 网络优化: 最小截集最大流:找到最小截集(弧的集合) 标号法:开始,为的标号, 最小费用最大流: 邮递员问题:通过消灭奇点,找欧拉回路 网络计划图: 最早开始最晚开始机动时间 最早结束最晚结束自由时差 工期优化:人力,费用,工期优化。 费用率=(最短时间费用-正常时间费用)/(正常时间-最短时间)②排队论(保证服务质量,又减少费用) 顾客源→(排队规则)队列→(服务规则)服务机构→离去 服务规则:FCFS,LCFS,随机服务,PR
M(顾客到达)|A(服务时间)|1(服务台数)|∞(容量)|∞(顾客源) N(t)队长N q (t)排队长T(t)顾客逗留时间T q (t)顾客等待时间 L 平均队长L q 平均等待队长W 平均逗留时间W q 平均等待时间 R 为系统利用率 泊松流(M):无后效性;平稳性;单个性; P 1(t,t+Δt)=λΔt+o(Δt); o(Δt)=∑∞ 2P n (t,t+Δt);E ξ=D ξ=λt (t 时刻n 个顾客的概率) 负指数分布(M):无记忆性(P(T>t+s/t>s)=P(T>t));[0,t)至少到达一 个顾客1-P 0(t )=1-e -t λ,t>0 !)()(K t e t V K t k λλ-= ,2,1,0=K ?? ?<≥-=-0,00,1)(t t e t F t i λξ),2,1( =i 爱尔朗分布(E K ):(相当于泊松流到达后被k 个服务台均分顾客形成) (其中,t>0,E(T)=1/μ,Var(T)=1/μ2k ) )! 1()()(1 >-= --t e k t t f t k μμμ K=1为M ,k=∞定长分布D,k ≥30正态分布近似 G 表示一般相互独立的随机分布 Little 公式:(四者知一即可) μ1 + =q W W W L λ= q q W L λ= ρ+=q L L ∑∞ ==0 n n nP L ∑∑∞=∞ =+=-=s n n m s n q nP P s n L 0 )( 服务率:ρ=λ/μ(λ为到达μ为服务) 排队系统分析:
施工方案及优化管理办法
成都经济区环线高速公路简阳至蒲江段项目 施工方案及优化管理办法 中铁二十一局集团第三工程有限公司简蒲高速公路JPTJ-10标项目经理部 二〇一四年九月
第一章总则 第一条专项施工方案是为工程项目实施和正常施工所进行的必要的现场组织设计工作,是指导工程项目施工生产全过程的纲领性技术经济文件,是对工程项目在人力和物力、时间和空间、资金和技术等方面所做的全面安排,经过批准的专项施工方案是编制项目责任预算的主要依据之一。 为加强工程项目施工组织设计及专项施工方案管理的基础工作,安全、优质、高效地完成工程项目建设任务,根据公司的有关规定,制定本办法。 第二条为加强工程项目管理,对专项施工方案实行评审及审批制度。项目部总工程师负责抓好专项施工方案的评审及审批;工区主管工程师负责抓好专项施工方案的编制、内部评审及审核,上报项目部评审及审核前必须先经过工区负责人批准。 第三条工程项目专项施工方案管理实行项目部和工区两级负责制,项目部和工区的两级施工技术部门应建立健全和完善各项规章制度,明确分工,责任到人。项目部和工区两级领导必须高度重视,加强组织及领导,自觉遵守本管理办法的各项规定。 第二章专项施工方案审核 第四条为充分发挥专项施工方案在工程项目管理工作中的作用,降低工程成本,提高经济效益,确保方案的切实可行,保证施工生产的顺利进行,项目经理部应做好专项施工方案的编写及审核工作。下列工程应该编制专项施工方案: 水深5m以上的深水基础、悬臂浇筑连续梁、现浇梁、钢栈桥。 第五条专项施工方案是施工组织的核心部分,是影响工程质量、安
全、进度、成本及效益的重要因素。为进一步发挥方案在项目管理中的作用,建立专项施工方案审核制度,项目部所辖工程项目的专项施工方案必须进行审核。 第六条专项施工方案编写与上报按照归口原则进行管理。由工区主管工程师负责组织编写、复核及审核,项目总工程师审核和项目经理批准后,再报公司审批。 第七条项目部工程部接到项目专项施工方案评审申请后,应及时组织评审,并将评审意见填入评审表记录。工区应根据评审意见对方案及时进行修改、补充和完善,并将修改、完善后的方案报项目部工程部审核备案。 第八条组织管理 1.项目部成立由项目经理、总工程师负责的专项施工方案评审及审批领导小组。 2.项目部工程部负责组织专项施工方案的编制、修改及完善工作。 第九条专项施工方案内容 1.编制依据及范围,工程概况和重难点分析; 2.施工组织规划、施工平面布置、工期进度计划; 3.人力资源、材料、机械设备、资金和技术等施工生产要素配置计划; 4.施工方案、方法、工艺及技术保证措施; 5.冬季、雨季、高温季节和夜间施工安排及保证措施; 6.工期进度、工程质量与安全生产保证措施; 7.环境保护、水土保持与文明施工保证措施; 8.风险预测与防范措施,事故应急预案,突发性事件的应急预案;
好手段促高效
好手段促高效 银川灵武市第五小学许怀德 课堂教学是个有机的整体,他是以教材为中介,师生双边活动的过程。优化课堂教学的关键在于正确处理教与学的关系,发挥师生双方的积极性,在教师启发引导下,学生主动探索,以最科学、最准确、最经济的途径获得新知,形成能力,取得较好的效果。然而由于数学知识的抽象性,与学生的认识正处于以直观形象思维为主要形式,逐步到抽象的逻辑思维过渡阶段,形成了学科性质与学生认识特点之间的矛盾。解决这一矛盾的外部条件,除了教师精心组织教材,优化教学目标,优化课堂结构,优化教学方法等等之外,还必须重视教学手段的优化,使教学手段能较好的发挥教学的辅助作用,帮助学生较快的理解和掌握数学知识,实现教学目标,提高课堂教学效率。 一、优化操作、演示过程,提高教学效率 儿童思维发展的过程是一个从具体形象到抽象思维的发展过程,布鲁纳提出概念的发展要经过三种模式,即动作性模式,影响性模式,符号性模式。他认为教学必须按照儿童智力发展的层次来进行。皮亚杰也提出:“要知道一个客体就必须动之以手。”这说明操作、演示在儿童获取知识中的重要作用。因此在教学中要重视从直观入手,充分运用操作、演示的教学手段,使学生动手、动口、动脑,调动多种感官,使其获得丰富的感性认识,借助形象思维来发展抽象的逻辑思维。 运用操作、演示的教学手段,首先教师要明确操作的要求,然
后根据教学内容和写生的认识特点,精心设计操作严实的程序、操作演示的方式方法和操作的指导语。考虑怎样操作,怎样演示才能展现知识的形成过程;什么时候操作,什么时候演示才能恰到好处地突出重点,突破难点。也就是要注意把握好用的恰当时机,掌握好火候,在教学的关键处揭示事物的数量关系和变化过程算理、解法和盘托出。如教学两位数加一位数:27+5,重点是使学生掌握口算方法,理解进位加法的算理。我们可以围绕教学重点分层次一步一步地操作演示。首先让学生摆小棒,在左边摆27根右边摆5根,启发学生想:先算什么?7根加5根是多少根?再算什么?学生根据老师的启示边操作边思考。接着叫一名学生在幻灯机上再次操作,要求学生边操作边口述操作过程,使学生悟出7根小棒加5根小棒是12根小棒,然后把10根小棒捆成1捆,再与原来的2捆加在一起。最后教师又在黑板上画图演示。使学生进一步理解进位加法的口算方法,掌握口算步骤。 二、优化插图的使用,提高教学效率 课本的插图能帮助学生理解教材内容,但是课本的插图是静止的,只能反映事物的结果,不能反映事物发展变化的过程。为了使插图真正祈祷直观形象地帮助学生理解抽象的数学知识的作用,可以分步插图,使画面由静变动,展示事物发展变化的过程,有效地帮助学生不但知道“结论”,还能知道获得“结论”的过程,从而真正地理解概念,掌握法则。如教学:同学们浇树,每人浇4棵,3个人共浇多少棵?此题书上配有插图,这幅图有三种出图的方法。
创新改善方案
1.0 目的 为鼓励公司员工积极提出工作改善、作业优化方面的建议,推动管理创新,增强内部活力,提高改善意识,充分的发掘员工智慧与潜力,达到流程优化、效率提升、成本节约、质量改进的企业目标,营造“自主管理、关注细节、追求卓越”的企业文化精神,提高我司经营效益和管理水平,提升企业的竞争力,特制定员工改善创新提案方案。 2.0 适用范围 所有部门和所有员工 3.0 定义及提案改善指标 3.1创新: 以新思维、新发明显著改变现有的生产、经营模式,取得显著的经济效益。 3.2提案改善: 企业内员工针对现行作业流程、工作方法、工具、设备及产品质量等可改善的地方提出的建设性的改善意见、构思或方案。 4.0 职责 4.1各职能部门经理: 负责改善制度宣导,鼓励员工积极参与;审核部门提案改善报告。每月汇总部门提案改善业绩与改善支出成本。提报提案改善人员奖励申请。 4.2管理部: 创新及提案改善的归口管理,负责提案改善评审及组织相关人员复核改善结果;负责编制提案改善人员奖励申请表及申请奖励发放。 4.3总经理: 各部门提案改善的最终审批。 4.4财务部:参与各部门提案改善的评审及改善结果复核; 负责提案改善奖励发放。 5.0 提案改善内容及受理 5.1 提案改善的分类 5.1.1管理体制类:有利于公司文化的建设,有利于现场、人事行政、 财务、信息等管理,提高团队士气等的提案; 5.1.2品质改善类:降低不良损失金额、降低材料不良率、提高产品一次合格率等的提案;成本改善效率提升、作业方法改善、工艺流程改善、工具或设备改善、物流改善、布局改善、降低消耗品使用量以及其他成本降低的提案; 5.1.3生产技术类:生产方式改善与变革、新生产技术建议及实施等方面的提案; 5.1.4其它类:有关产品外观及包装改进、安全生产、6S及环境、节能改善等的提案。 5.2 提案改善的受理情况 5.2.1符合5.1分类并满足以下受理情况的提案;
最优化方法及应用
陆吾生教授是加拿大维多利亚大学电气与计算机工程系 (Dept. of Elect. and Comp. Eng. University of Victoria) 的正教授, 且为我校兼职教授,曾多次来我校数学系电子系讲学。陆吾生教授的研究方向是:最优化理论和小波理论及其在1维和2维的数字信号处理、数字图像处理、控制系统优化方面的应用。 现陆吾生教授计划在 2007 年 10-11 月来校开设一门为期一个月的短期课程“最优化理论及其应用”(每周两次,每次两节课),对象是数学系、计算机系、电子系的教师、高年级本科生及研究生,以他在2006年出版的最优化理论的专著作为教材。欢迎数学系、计算机系、电子系的研究生及高年级本科生选修该短期课程,修毕的研究生及本科生可给学分。 上课地点及时间:每周二及周四下午2:00开始,在闵行新校区第三教学楼326教室。(自10月11日至11月8日) 下面是此课程的内容介绍。 ----------------------------------- 最优化方法及应用 I. 函数的最优化及应用 1.1 无约束和有约束的函数优化问题 1.2 有约束优化问题的Karush-Kuhn-Tucker条件 1.3 凸集、凸函数和凸规划 1.4 Wolfe对偶 1.5 线性规划与二次规划 1.6 半正定规划 1.7 二次凸锥规划 1.8 多项式规划 1.9解最优化问题的计算机软件 II 泛函的最优化及应用 2.1 有界变差函数 2.2 泛函的变分与泛函的极值问题 2.3 Euler-Lagrange方程 2.4 二维图像的Osher模型 2.5 泛函最优化方法在图像处理中的应用 2.5.1 噪声的消减 2.5.2 De-Blurring 2.5.3 Segmentation ----------------------------------------------- 注:这是一门约二十学时左右的短期课程,旨在介绍函数及泛函的最优化理论和方法,及其在信息处理中的应用。只要学过一元及多元微积分和线性代数的学生就能修读并听懂本课程。课程中涉及到的算法实现和应用举例都使用数学软件MATLAB 华东师大数学系
机器学习中常见的几种优化方法
机器学习中常见的几种优化方法 阅读目录 1. 梯度下降法(Gradient Descent) 2. 牛顿法和拟牛顿法(Newton's method & Quasi-Newton Methods) 3. 共轭梯度法(Conjugate Gradient) 4. 启发式优化方法 5. 解决约束优化问题——拉格朗日乘数法 我们每个人都会在我们的生活或者工作中遇到各种各样的最优化问题,比如每个企业和个人都要考虑的一个问题“在一定成本下,如何使利润最大化”等。最优化方法是一种数学方法,它是研究在给定约束之下如何寻求某些因素(的量),以使某一(或某些)指标达到最优的一些学科的总称。随着学习的深入,博主越来越发现最优化方法的重要性,学习和工作中遇到的大多问题都可以建模成一种最优化模型进行求解,比如我们现在学习的机器学习算法,大部分的机器学习算法的本质都是建立优化模型,通过最优化方法对目标函数(或损失函数)进行优化,从而训练出最好的模型。常见的最优化方法有梯度下降法、牛顿法和拟牛顿法、共轭梯
度法等等。 回到顶部 1. 梯度下降法(Gradient Descent) 梯度下降法是最早最简单,也是最为常用的最优化方法。梯度下降法实现简单,当目标函数是凸函数时,梯度下降法的解是全局解。一般情况下,其解不保证是全局最优解,梯度下降法的速度也未必是最快的。梯度下降法的优化思想是用当前位置负梯度方向作为搜索方向,因为该方向为当前位置的最快下降方向,所以也被称为是”最速下降法“。最速下 降法越接近目标值,步长越小,前进越慢。梯度下降法的搜索迭代示意图如下图所示: 牛顿法的缺点: (1)靠近极小值时收敛速度减慢,如下图所示; (2)直线搜索时可能会产生一些问题; (3)可能会“之字形”地下降。 从上图可以看出,梯度下降法在接近最优解的区域收敛速度明显变慢,利用梯度下降法求解需要很多次的迭代。 在机器学习中,基于基本的梯度下降法发展了两种梯度下降方法,分别为随机梯度下降法和批量梯度下降法。
常用最优化方法评价准则
常用无约束最优化方法评价准则 方法算法特点适用条件 最速下降法属于间接法之一。方法简便,但要计算一阶偏导 数,可靠性较好,能稳定地使函数下降,但收敛 速度较慢,尤其在极点值附近更为严重 适用于精度要求不高或用于对 复杂函数寻找一个好的初始 点。 Newton法属于间接法之一。需计算一、二阶偏导数和Hesse 矩阵的逆矩阵,准备工作量大,算法复杂,占用 内存量大。此法具有二次收敛性,在一定条件下 其收敛速度快,要求迭代点的Hesse矩阵必须非 奇异且定型(正定或负定)。对初始点要求较高, 可靠性较差。 目标函数存在一阶\二阶偏导 数,且维数不宜太高。 共轭方向法属于间接法之一。具有可靠性好,占用内存少, 收敛速度快的特点。 适用于维数较高的目标函数。 变尺度法属于间接法之一。具有二次收敛性,收敛速度快。 可靠性较好,只需计算一阶偏导数。对初始点要 求不高,优于Newton法。因此,目前认为此法是 最有效的方法之一,但需内存量大。对维数太高 的问题不太适宜。 适用维数较高的目标函数 (n=10~50)且具有一阶偏导 数。 坐标轮换法最简单的直接法之一。只需计算函数值,无需求 导,使用时准备工作量少。占用内存少。但计算 效率低,可靠性差。 用于维数较低(n<5)或目标函 数不易求导的情况。 单纯形法此法简单,直观,属直接法之一。上机计算过程 中占用内存少,规则单纯形法终止条件简单,而 不规则单纯形法终止条件复杂,应注意选择,才 可能保证计算的可靠性。 可用于维数较高的目标函数。
常用约束最优化方法评价标准 方法算法特点适用条件 外点法将约束优化问题转化为一系列无约束优化问题。 初始点可以任选,罚因子应取为单调递增数列。 初始罚因子及递增系数应取适当较大值。 可用于求解含有等式约束或不等 式约束的中等维数的约束最优化 问题。 内点法将约束优化问题转化为一系列无约束优化问题。 初始点应取为严格满足各个不等式约束的内点, 障碍因子应取为单调递减的正数序列。初始障碍 因子选择恰当与否对收敛速度和求解成败有较大 影响。 可用于求解只含有不等式约束的 中等维数约束优化问题。 混合罚函数法将约束优化问题转化为一系列无约束优化问题, 用内点形式的混合罚函数时,初始点及障碍因子 的取法同上;用外点形式的混合罚函数时,初始 点可任选,罚因子取法同外点法相同。 可用于求解既有等式约束又有不 等式约束的中等维数的约束化问 题。 约束坐标轮换法由可行点出发,分别沿各坐标轴方向以加步探索 法进行搜索,使每个搜索点在可行域内,且使目 标函数值下降。 可用于求解只含有不等式约束, 且维数较低(n<5),目标函数的 二次性较强的优化问题。 复合形法在可行域内构造一个具有n个顶点的复合形,然 后对复合形进行映射变化,逐次去掉目标函数值 最大的顶点。 可用于求解含不等式约束和边界 约束的低维优化问题。
常用无约束最优化方法(一)
项目三 常用无约束最优化方法(一) [实验目的] 编写最速下降法、Newton 法(修正Newton 法)的程序。 [实验学时] 2学时 [实验准备] 1.掌握最速下降法的思想及迭代步骤。 2.掌握Newton 法的思想及迭代步骤; 3.掌握修正Newton 法的思想及迭代步骤。 [实验内容及步骤] 编程解决以下问题:【选作一个】 1.用最速下降法求 22120min ()25[22]0.01T f X x x X ε=+==,,,. 2.用Newton 法求 22121212min ()60104f X x x x x x x =--++-, 初始点 0[00]0.01T X ε==,,. 最速下降法 Matlab 程序: clc;clear; syms x1 x2; X=[x1,x2]; fx=X(1)^2+X(2)^2-4*X(1)-6*X(2)+17; fxd1=[diff(fx,x1) diff(fx,x2)]; x=[2 3]; g=0; e=0.0005; a=1; fan=subs(fxd1,[x1 x2],[x(1) x(2)]); g=0; for i=1:length(fan) g=g+fan(i)^2; end g=sqrt(g); step=0; while g>e step=step+1; dk=-fan; %点x(k)处的搜索步长
ak=((2*x(1)-4)*dk(1)+(2*x(2)-6)*dk(2))/(dk(1)*dk(2)-2*dk(1)^2-2*dk(2)^2); xu=x+ak*dk; x=xu; %输出结果 optim_fx=subs(fx,[x1 x2],[x(1) x(2)]); fprintf(' x=[ %d %d ] optim_fx=%d\n',x(1),x(2),optim_fx); %计算目标函数点x(k+1)处一阶导数值 fan=subs(fxd1,[x1 x2],[x(1) x(2)]); g=0; for i=1:length(fan) g=g+fan(i)^2; end g=sqrt(g); end %输出结果 optim_fx=subs(fx,[x1 x2],[x(1) x(2)]); fprintf('\n最速下降法\n结果:\n x=[ %d %d ] optim_fx=%d\n',x(1),x(2),optim_fx); c++程序 #include
优化实施方案3篇
优化实施方案3篇 一、指导思想: 为创建平安、卫生、文明校园,优化校园周边环境,强化学生的安全意识和日常行为规范,保证学校良好的教育教学秩序和学习生活环境,特制定本方案。 二、领导小组: 组长:蒋x 副组长:陈x 李x(常务)郭x 黄x 黄x 邝x 陈x 成员:纠察处相关人员、各班班主任。 下设文明校园纠察处。 顾问:蒋xx、陈x飞 第一责任人:李x 第二责任人:罗x 办公室主任:邓x 秘书:何x、尹x 值日领导及纠察处人员值日安排表: 三、活动内容和要求: 1、寄宿生周一至周五严禁外出就餐,通学生凭校牌进出校园。
2、规范学生的仪容仪表:不准留长发;不准染发、烫发、剃光头;不准戴首饰;不准穿拖鞋;不准穿奇装异服。 3、规范学生的行为习惯:不准抽烟;不准讲脏话;不准追打起哄;不准谈情说爱;不准带手机进教学区。 4、规范学生的安全意识:不准携带管制刀具等危险品进入校园;不准与社会上不良人员交朋友;不准进网吧、茶楼、歌舞厅等娱乐场所;不准带社会人员来学校;不准夜不归宿;不准到外面租房(除非家长同住照料);不准追追打打;不准爬围墙等高危处;不准打架斗殴、不准在教学区骑单车、摩托车。 5、xx二中优化校园管理条例。 四、活动安排和措施: “安全文明校园”创建活动分四个阶段进行 第一阶段:宣传发动 1、通过集会、校园网、广播站、宣传栏、黑板报、班会等阵地进行宣传发动。责任人:办公室、政务处、团委、班主任。 2、组织师生学习学校制定的《xx二中学生管理手册》、《xx二中优化校园管理条例》、《xx二中班级管理评分细则》、
《手机对中学生的危害性》等相关制度和知识。 责任人:办公室、政务处、班主任。 第二阶段:集中整治 1、校园安全整治: ①教学区、实验室、寝室、食堂、运动场等安全隐患排查。责任人:罗xx、何xx、保安人员、门卫、宿舍管理员; ②校外租房的管理。责任人:邓x、班主任; ③外来车辆和人员进校园的管制。责任人:邓x、保安人员、门卫。 2、校园周边环境整治: ①校门口至防疫站十路口(新村路口)附近安全防范。责任人:邓x、纠察处人员; ②晚间校园内安全排查。责任人:黄x、尹xx; ③校园周边网吧排查。责任人:罗xx、邓x。 3、日常行为整治: ①学生仪容仪表整治。责任人:年级分管领导、组长和班主任、政务处人员; ②学生卫生习惯整治。责任人:纠察处相关人员、班主
SEO搜索引擎优化常用方法
SEO搜索引擎优化常用方法 作者:葬爱来源:https://www.360docs.net/doc/b416994249.html, 时间:2012-8-12 最近听很多人说,seo也就是那么一会儿事,每天发发外链,写写文章也就够了。但是今天我想说的是,seo技术并不是简单。大局观的优化方略才是最重要的。 网站结构、关键词布局、代码精简、日志分析等等,当然外链和原创内容页绝对必不可少的。 下面具体分享一下一些做优化的一些常见的二部曲。 一、分析竞争对手 1.分析你的竞争对手为什么排在你前面或者后面。如果在你前面,分析他比你多做了哪些东西,如果你没有就赶紧补上。同时分析竞争对手网站的缺憾,你同时进行弥补。这是常见的做法。 2.采用有特色的推广方法。比如适当的做一做jingjia也是有利于优化的。同时一些心思维,如利用起网站用户对网站的推广。这样才是最有效的。用户上去了,优化液自然会上去。 二、弥补自身的优化不足 自己的网站必须要最好,才是根本,如果竞争对手的网站排在你后面,那更要注意了。一旦放松,就是别人的机会。下面笔者分享一下自身优化的一些东西。 1.分析关键词。我相信,很多人都是先选关键词,再做站。整个站都围绕这个关键词,那么排名自然会好一点。同时关键词
应该与网站的内容相关,不要选择不相关的。关键词使用的时候也要注意英文逗号或者下划线的隔开。 2.生成静态。学了一段四件后,看到很多人说生成静态和动态都差不多。理由是搜索引擎不断进步,已经可以抓取动态内容。同时不论是对于百度还是对于google来说,我相信不会弱智到是动态的就不收录。很多厉害的网站都是动态的,但也很不错。但是百度给出的优化指南明确说明了最好网站静态化,可见百度其实也希望站长们将自己的网站静态化。或许百度这个问题没有彻底解决。同时,一个纯HTML页面绝对比动态页面打开速度快。用户体验上来说,也是好的。 3.div+css。同样,table书写的网站百度收录照样也快。但我个人趋向于div,为什么?因为这样更快,理由就同二了。但是div不要太多层的嵌套,目前百度的技术还不足以抓取嵌套次数太多的内容。 4.注意Meat标签。这个几乎是我现在看一个网站优化最先看的东西,虽说搜索引擎已经开始降低meta标签的影响,但是我觉得还是很重要。 5.打造好你的友链。这个主要就靠一些站长群了。你如果没有这些群,最起码要有一群拥有比较高权重的站长朋友。老站带新站,新站成长速度会快很多。建议大家要建立一些网站群,利用互相带动的方法,去推动你的网站发展。友链的重要性,不言而喻。同时友链也要注意甑别对自己网站的好坏。
第九章 最优化方法
第九章 最优化方法 本章主要介绍线性规划、0-1规划、非线性规划等问题的MATLAB 求解。 9.1 线性规划(Linear Programming ,简写为LP )问题 线性规划问题就是求多变量线性函数在线性约束条件下的最优值。满足约束条件的解称为可行解,所有可行解构成的集合称为可行域,满足目标式的可行解称为最优解。 MATLAB 解决的线性规划问题的标准形式为: min z f x ¢ =? .. A x b s t Aeq x beq lb x ub ì祝??? ?í??#??? 其中,,,,,f x b beq lb ub 为列向量,,A Aeq 为矩阵。 其它形式的线性规划问题都可经过适当变换化为此标准形式。 在MATLAB 中求解线性规划问题函数为linprog ,其使用格式为: [x, fval, exitflag, output, lambda] = linprog(f, A, b, Aeq, beq, lb, ub) 输入部分:其中各符号对应线性规划问题标准形式中的向量和矩阵,如果约束条件中有缺少,则其相应位置用空矩阵[]代替。 输出部分:其中x 为最优解,用列向量表示;fval 为最优值;exitflag 为退出标志,若exitflag=1表示函数有最优解,若exitflag=0表示超过设定的迭代最大次数,若exitflag=-2,表示约束区域不可行,若exitflag=-3,表示问题无解,若exitflag=-4,表示执行迭代算法时遇到NaN ,若exitflag=-5,表示原问题和对偶问题均不可行,若exitflag=-7,表示搜索方向太小,不能继续前进;output 表明算法和迭代情况;lambda 表示存储情况。 例1 用linprog 函数求下面的线性规划问题
优化方案范文6篇
优化方案范文6篇 优化方案范文6篇 随着现在 ___的不断发展,证券市场已经是我国市场经济体系的重要组成部分。对于我国证券市场目前所处的阶段,证券市场面临着新的机遇和挑战。证券行业特点是对于信息技术的高度依赖,因此,作为证券市场支撑的证券行业信息系统也面临着更高的要求,才能更好地支撑目前证券市场的发展。 2.1 运营工作量大 由于我国证券行业交易量大,行业相应的运行系统每日的运行工作量较大,而证券行业特点是对于信息技木高度依赖,过大的工作量一旦导致信息系统出现故障中断,影响交易的正常进行,带来的损失和影响是难以承受的。 从信息系统的角度来看,分散式多交易节点系统的日常维护工作,工作量要比单节点的集中交易系统的运营维护压力增加几倍。同时从信息学的角度来看,当数量呈现倍数上升时,其故障点以及发生故障的可能也随之上升,降低大事故的好处将会带来小事故数量的增加。
2.2 运营准确度要求高 现代交易系统的一大要求是故障容忍度较低区别于我国曾经使 用过的书面交易系统,电子化交易本身就对管理运营维护进度要求较高。由于证券行业的交易性质影响,每日承担着以数字为主同时数额较大的成交量,对于信息系统运营准确度要求自然较高。同时,我国证券相应监管层对于证券交易事故零容忍的监管要求,对于我国证券行业的信息系统运营准确度要求更是提升到了一个十分严苛的程度。 2.3 在创新压力下系统更新要求严苛 中国的证券资本市场于90年代才开始创始和发展,整体上仍未成熟,从本质上还是处于向国外学习先进资本市场经验的阶段,近年来进行的几次业务创新也是以国外发展为主要参考。然而,由于整体资本市场差距较大,国内不断高涨的资本市场投资热情又促使国内证券市场不断引入新的业务品种和交易规则,整体不断更新的数据众多。而我国的证券市场发展市场较短,在短时间内,我国证券市场的业务创新频率较高。根据20xx年的统计,我国的证券系统在业务创新要 求下,相关的业务系统变更数量多达近百次,基本上每周都需要有较大的系统变更。 2.4 系统的整体运营维护工作促使管理难度增大
谈谈项目中常用的MySQL优化方法
谈谈项目中常用的MySQL优化方法 本文我们来谈谈项目中常用的MySQL优化方法,共19条,具体如下: 一、EXPLAIN 做MySQL优化,我们要善用EXPLAIN查看SQL执行计划。 下面来个简单的示例,标注(1、2、3、4、5)我们要重点关注的数据: type列,连接类型。一个好的SQL语句至少要达到range级别。杜绝出现all级别。 key列,使用到的索引名。如果没有选择索引,值是NULL。可以采取强制索引方式 key_len列,索引长度。 rows列,扫描行数。该值是个预估值。 extra列,详细说明。注意,常见的不太友好的值,如下:Using filesort,Using temporary。 二、SQL 语句中IN 包含的值不应过多 MySQL对于IN做了相应的优化,即将IN中的常量全部存储在一个数组里面,而且这个数组是排好序的。但是如果数值较多,产生的消耗也是比较大的。再例如:select id from t where num in(1,2,3) 对于连续的数值,能用between就不要用in了;再或者使用连接来替换。 三、SELECT语句务必指明字段名称 SELECT*增加很多不必要的消耗(CPU、IO、内存、网络带宽);增加了使用覆盖索引的可能性;当表结构发生改变时,前断也需要更新。所以要求直接在select后面接上字段名。 四、当只需要一条数据的时候,使用limit 1 这是为了使EXPLAIN中type列达到const类型 五、如果排序字段没有用到索引,就尽量少排序 六、如果限制条件中其他字段没有索引,尽量少用or or两边的字段中,如果有一个不是索引字段,而其他条件也不是索引字段,会造成该查询不走索引的情况。很多时候使用union all或者是union(必要的时候)的方式来代替“or”
班组优化实施方案 -
**段班组整合优化实施方案 为了精简班组数量,精干班长队伍,控制关口前移,管理重心下移。确保班长责、权、利落实,班组岗位人员配置进一步优化,从而使班组建设总体水平显着提升,结合**段实际,特制订此方案。 一、公司重视班组建设,推出班组整合优化,带来员工观念、管理手段、薪酬分配等发生变化。同时也促使班组上游管理层级发生变化。 二、班组整合 1、将电工班和钳工班合并为维修班,竞选班长1名,综合来看利大于弊: 1.1、机电一体化是趋势,合并后能弥补机械、电气人为分家的落后模式。 1.2、合并后布置工作时考虑更全面,效率更高。以前段一个项目要分割成钳工干哪块,电工负责哪块,合并后将打破各自为政,打破工种界限(当然涉及特种作业许可的由持证人员操作)。 1.3、合并后将有利于推广一岗多能工作以及弥补人员不足的短板,甚至将不适合特种作业或技能差的人转岗。 1.4、目前电工班有党员1名,钳工班党员为零,钳工班先进性不足,合并后该问题得以解决。 三、优化的目的是使实现双赢。为使班组长掌握灵活性和积极性,建议部对薪酬进行改革配合班组优化,为在综合段推进“工时制”分配办法,实现多劳多得,不劳不得。依据***段工作对象来看,需部、段协商并界定好基本且固定的检维修对象外,其它非因本身业务和自身原因产生的劳动应参考公司的《支援管理办法》让接受了劳务或支援的车间或单位支付报酬。比如今后去**部更换栅栏就不能是免费,而应该由**部按《支援管理办法》支付费用;如养路参与铁水落地抢修由**支付“支援”费,外单位损坏的铁路抢修就要对方支付费用,外单位挖断的信号电缆就要支付抢修费,因为员工是挣“工时”的。机制灵活后应能调动班组长及员工参与管理,把企业当成自己的家的直观能动性。 钳电工班合并成维修班后,实施岗位薪酬一样,定岗薪酬不高,但通过持证情况和技能等级情况拉开待遇差距,再以日常工时来促进多劳多得,少劳少得,同时也会促进大家拿证,形成“学比赶超”的局面。 公司推进班组自主管理目的很明晰,就是精简机构,做强班组。今后管理层级基本就是三级:上层规划中层落实下层执行。班组精简做强后,班组级管理更加独立自主,车间级人员的技术和管理能手充实到班组,车间级的管理职责相应调整为“精准服务”班组,为班组“增压减负”,体现责权利相统一,落实“变干实”。 以上方案妥当否,请领导核审。 **段 2018年9月15日 关于2018年班组长竞聘上岗的方案 班组长是兵头将尾,直接与员工打交道,官虽不大,责任重大。车间各项规章制度的落实在班组;各项生产任务的完成看班组;企业文化建设也是班组先行。一句话,加强车间执行力主要靠班组。班组长是上
多目标优化方法
多目标优化方法 基本概述 几个概念 优化方法 一、多目标优化基本概述 现今,多目标优化问题应用越来越广,涉及诸多领域。在日常生活和工程中,经常要求不只一项指标达到最优,往往要求多项指标同时达到最优,大量的问题都可以归结为一类在某种约束条件下使多个目标同时达到最优的多目标优化问题。例如:在机械加工时,在进给切削中,为选择合适的切削速度和进给量,提出目标:1)机械加工成本最低2)生产率低3)刀具寿命最长;同时还要满足进给量小于加工余量、刀具强度等约束条件。 多目标优化的数学模型可以表示为: X=[x1,x2,…,x n ]T----------n维向量 min F(X)=[f1(X),f2(X),…,f n(X)]T----------向量形式的目标函数s.t. g i(X)≤0,(i=1,2,…,m) h j(X)=0,(j=1,2,…,k)--------设计变量应满足的约束条件多目标优化问题是一个比较复杂的问题,相比于单目标优化问题,在多目标优化问题中,约束要求是各自独立的,所以无法直接比较任意两个解的优劣。
二、多目标优化中几个概念:最优解,劣解,非劣解。 最优解X*:就是在X*所在的区间D中其函数值比其他任何点的函数值要小即f(X*)≤f(X),则X*为优化问题的最优解。 劣解X*:在D中存在X使其函数值小于解的函数值,即f(x)≤f(X*), 即存在比解更优的点。 非劣解X*:在区间D中不存在X使f(X)全部小于解的函数值f(X*). 如图:在[0,1]中X*=1为最优解 在[0,2]中X*=a为劣解 在[1,2]中X*=b为非劣解 多目标优化问题中绝对最优解存在可能性一般很小,而劣解没有意义,所以通常去求其非劣解来解决问题。
最优化应用(数据处理)
最优化问题的数据处理以及Matlab求解摘要数学问题是科学研究领域经常需要解决的问题. 研究者通常将自己研究的问题用于数学建模的方法建立起数学模型, 然后通过求解数学模型的方法获得所研究问题的解.基于Matlab语言的应用数学问题的求解方法, 有着优于其他两种计算机数学语言Mathematica和Maple无法比拟的优势和适用面. 本文主要介绍的是有约束的线性规划和二次型规划的Matlab求解过程. 关键词: 数学模型线性规划二次型规划无约束问题约束问题 1.最优化方法应用背景 在生活和工作中, 人们对于同一问题往往会提出多种解决方案,并通过各方面的论证从中提取最佳方案. 最优化方法就是专门研究如何从多个方案中科学合理的提取出最佳方案的科学. 由于优化问题无处不在, 目前最优化方法的应用和研究已经深入到了生产和科研的各个领域, 如土木工程、机械工程、化学工程、运输调度、生产控制、经济规划、经济管理等, 并取得了显著地经济效益和社会效益. 用最优化方法求最优化问题的技术称为最优化技术, 它包含两个方面的内容: 1) 建立数学模型即用数学语言来描述最优化问题. 模型中的数学关系式反映了 最优化问题所要达到的的目标和各种约束条件. 2) 数学求解数学模型建好以后, 选择合适的最优化方法来进行求解. 最优化方法的发展很快, 现在已经包含有多个分支, 如线性规划、非线性规划、整数规划、动态规划、多目标规划等. 利用MATLAB优化工具箱可以求解线性规划、非线性规划和多目标规划问题. 具体而言, 包括线性、非线性最小化, 最大最小化, 二次规划, 半无限问题, 线性、非线性方程(组)的求解, 线性、非线性的最小二乘问题. 另外, 该工具箱还提供了线性、非线性最小化, 方程求解, 曲线拟合, 二次规划等问题中大型课题的求解方法. 为优化方法在工程中的实际应用提供了更方便快捷的途径. 关于最优化方法以及支持向量机的理论知识可参考文献[1][2]. 2.主要的数据处理方法 本学期学习的数据处理方法主要有矩阵分解、线性判别分析和局部降维方法. 2.1. 矩阵分解 矩阵分解[3]是将矩阵拆解为数个矩阵的乘积, 可分为三角分解、满秩分解、QR分解、Jordan 分解和奇异值分解等, 常见的有三种: 三角分解法(Triangular Factorization), QR分解法(QR Factorization), 奇异值分解法(Sigular Value Decomposition, SVD). 三角分解法是将原正方矩阵分解成一个上三角形矩阵或是排列的上三角形矩阵和一 个下三角形矩阵, 这样的分解法又称为LU分解法. 它的用途主要在简化一个大矩阵的行列式值的计算过程, 求反矩阵, 和求解联立方程组. 不过要注意这种分解法所得到的上下
最优化方法及其应用课后答案
1 2 ( ( 最优化方法部分课后习题解答 1.一直优化问题的数学模型为: 习题一 min f (x ) = (x ? 3)2 + (x ? 4)2 ? g (x ) = x ? x ? 5 ≥ ? 1 1 2 2 ? 试用图解法求出: s .t . ?g 2 (x ) = ?x 1 ? x 2 + 5 ≥ 0 ?g (x ) = x ≥ 0 ? 3 1 ??g 4 (x ) = x 2 ≥ 0 (1) 无约束最优点,并求出最优值。 (2) 约束最优点,并求出其最优值。 (3) 如果加一个等式约束 h (x ) = x 1 ? x 2 = 0 ,其约束最优解是什么? * 解 :(1)在无约束条件下, f (x ) 的可行域在整个 x 1 0x 2 平面上,不难看出,当 x =(3,4) 时, f (x ) 取最小值,即,最优点为 x * =(3,4):且最优值为: f (x * ) =0 (2)在约束条件下, f (x ) 的可行域为图中阴影部分所示,此时,求该问题的最优点就是 在约束集合即可行域中找一点 (x 1 , x 2 ) ,使其落在半径最小的同心圆上,显然,从图示中可 以看出,当 x * = 15 , 5 ) 时, f (x ) 所在的圆的半径最小。 4 4 ?g (x ) = x ? x ? 5 = 0 ? 15 ?x 1 = 其中:点为 g 1 (x ) 和 g 2 (x ) 的交点,令 ? 1 1 2 ? 2 求解得到: ? 4 5 即最优点为 x * = ? ?g 2 (x ) = ?x 1 ? x 2 + 5 = 0 15 , 5 ) :最优值为: f (x * ) = 65 ?x = ?? 2 4 4 4 8 (3).若增加一个等式约束,则由图可知,可行域为空集,即此时最优解不存在。 2.一个矩形无盖油箱的外部总面积限定为 S ,怎样设计可使油箱的容量最大?试列出这个优 化问题的数学模型,并回答这属于几维的优化问题. 解:列出这个优化问题的数学模型为: max f (x ) = x 1x 2 x 3 ?x 1x 2 + 2x 2 x 3 + 2x 1x 3 ≤ S
多目标最优化模型
第六章 最优化数学模型 §1 最优化问题 1.1 最优化问题概念 1.2 最优化问题分类 1.3 最优化问题数学模型 §2 经典最优化方法 2.1 无约束条件极值 2.2 等式约束条件极值 2.3 不等式约束条件极值 §3 线性规划 3.1 线性规划 3.2 整数规划 §4 最优化问题数值算法 4.1 直接搜索法 4.2 梯度法 4.3 罚函数法 §5 多目标优化问题 5.1 多目标优化问题 5.2 单目标化解法 5.3 多重优化解法 5.4 目标关联函数解法 5.5 投资收益风险问题 第六章 最优化问题数学模型 §1 最优化问题 1.1 最优化问题概念 (1)最优化问题 在工业、农业、交通运输、商业、国防、建筑、通信、政府机关等各部门各领域的实际工作中,我们经常会遇到求函数的极值或最大值最小值问题,这一类问题我们称之为最优化问题。而求解最优化问题的数学方法被称为最优化方法。它主要解决最优生产计划、最优分配、最佳设计、最优决策、最优管理等求函数最大值最小值问题。 最优化问题的目的有两个:①求出满足一定条件下,函数的极值或最大值最小值;②求出取得极值时变量的取值。 最优化问题所涉及的内容种类繁多,有的十分复杂,但是它们都有共同的关键因素:变量,约束条件和目标函数。 (2)变量 变量是指最优化问题中所涉及的与约束条件和目标函数有关的待确定的量。一般来说,它们都有一些限制条件(约束条件),与目标函数紧密关联。 设问题中涉及的变量为n x x x ,,,21 ;我们常常也用),,,(21n x x x X 表示。 (3)约束条件 在最优化问题中,求目标函数的极值时,变量必须满足的限制称为约束条件。 例如,许多实际问题变量要求必须非负,这是一种限制;在研究电路优化设
非线性方程数值解及优化方法
第4章非线性方程数值解及优化方法 统计学中的一个重要问题是MLE估计问题,解决这样问题的关键是寻找似然方程的最优解.在很多情况下,我们不能直接得到似然方程的显式解,需要通过数值分析的方法得到方程的解.除极大似然外,统计学中也有许多其它的优化问题,如在Bayes决策问题中的最小风险、非线性最小二乘问题的求解问题等. 上述求解都属于如下的一般问题: arg min θ∈D g(θ),(4.1)其中g是参数向量θ的函数,称之为目标函数(objective function),而θ我们有时亦称之为决策变量(decision variable).决策变量的取值区域D称为可行集合(feasible set)或者候选集合(candidate set).由于最大化一个函数等价于其负值的最小化(?g(θ)),故区别最大与最小的意义不大.于是作为惯例,我们一般将考虑求取最小值的算法. 这里我们需要区分有约束和无约束两种优化问题.当D就是g(θ)的定义域时,问题4.1就是一无约束优化问题(unconstrained optimization problem);否则,即是有约束优化问题(con-strained optimization problem).另外,在取值区域内D的某个特定子域内,可能有某个局部最小值,而在另外一个特定子域内存在另一个局部最小值.我们之后称全局最优(global optimum)即指在取值区域内D的最小值;称局部最优(local optimum)即指在取值区域内D的某个子域内的最小值. 在本章,我们将主要考虑g关于θ为光滑且可微的情形,而g在离散区域上的优化问题将在最后给予介绍. §4.1单变量方程求根问题 我们知道,很多优化问题都等价于是一个方程求根问题.因此,我们首先来讨论一元方程求根问题的数值解法,即对于给定的关于x的函数g寻找x使得g(x)=0. 问题:求解函数log x/(1+x)的最大值?其等价于求方程 g(x)=1+1/x?log x (1+x)2 =0?1+1/x?log x=0 的解.显然没有显式解。 我们介绍一些常用的迭代算法.我们接下来假设g是一连续函数. §4.1.1二分法(bisection method) 一、原理:如果g在区间[a0,b0]上连续,且g(a0)g(b0) 0,则由中值定理知,至少存在一个x?∈[a0,b0],使得g(x?)=0.我们称[a0,b0]为有根区间. ·27·