基于SIMULINK的电机回馈制动系统仿真_曹晓宇
·实验研究
基于SIMULINK的电机回馈制动系统仿真
曹晓宇(华北电力大学,
河北 保定 071000)摘 要:本文旨在运用MATLAB中的SIMULINK系统对电机回馈制动系统进行仿真。仿真过程基于电机回馈制动系统的等效电路图。仿真结果表明,回馈制动系统可以在制动情况下向蓄电池充电,有效利用了电动车制动时的残余动能。仿真结果论证了该系统的工程应用价值。关键词:回馈制动系统;SIMULINK仿真
1 电机回馈制动系统原理示意图
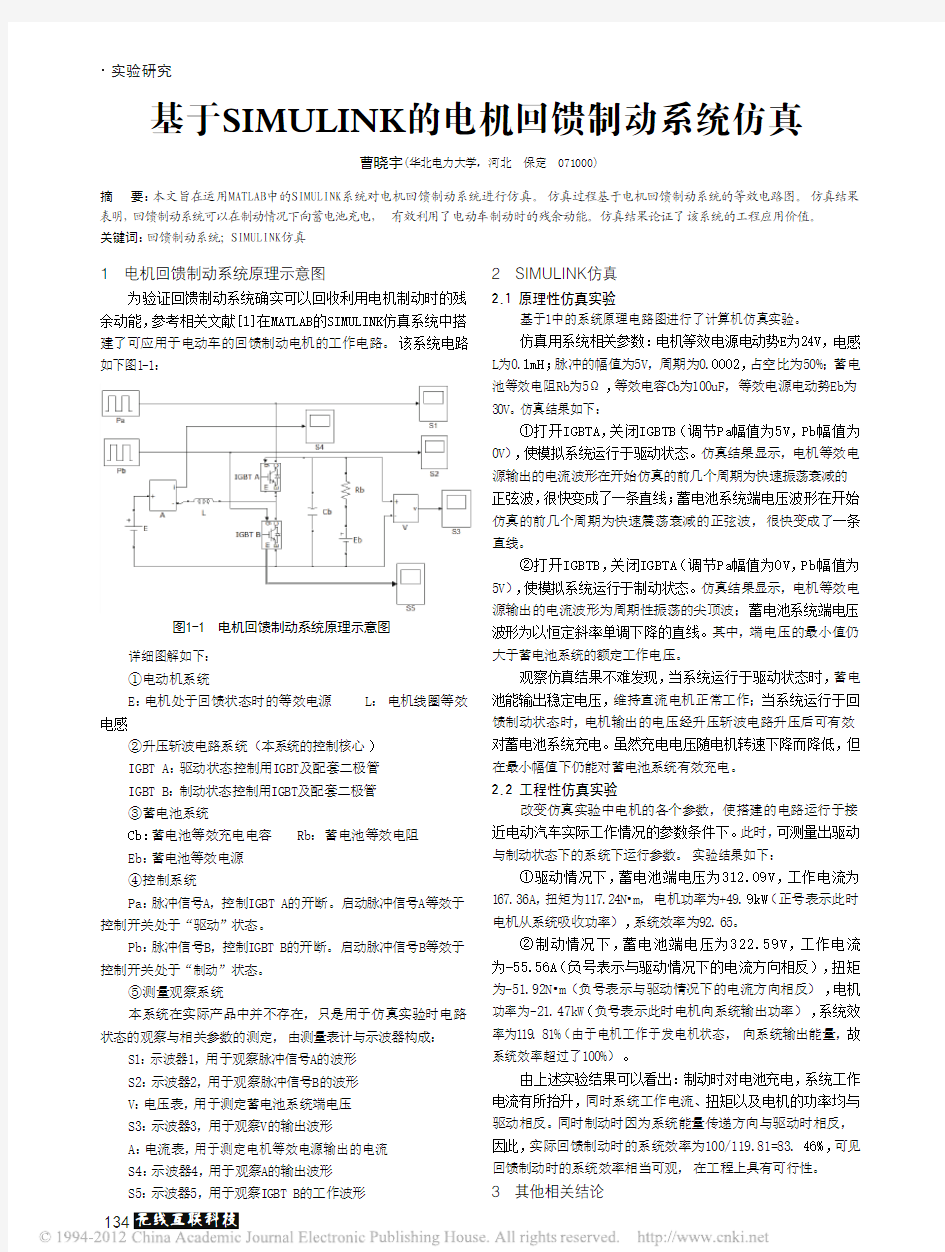
为验证回馈制动系统确实可以回收利用电机制动时的残余动能,参考相关文献[1]在MATLAB的SIMULINK仿真系统中搭建了可应用于电动车的回馈制动电机的工作电路。该系统电路如下图1-1:
详细图解如下:①电动机系统
E:电机处于回馈状态时的等效电源 L:电机线圈等效电感
②升压斩波电路系统(本系统的控制核心)IGBT A:驱动状态控制用IGBT及配套二极管 IGBT B:制动状态控制用IGBT及配套二极管③蓄电池系统
Cb:蓄电池等效充电电容 Rb:蓄电池等效电阻 Eb:蓄电池等效电源④控制系统
Pa:脉冲信号A,控制IGBT A的开断。启动脉冲信号A等效于控制开关处于“驱动”状态。
Pb:脉冲信号B,控制IGBT B的开断。启动脉冲信号B等效于控制开关处于“制动”状态。
⑤测量观察系统
本系统在实际产品中并不存在,只是用于仿真实验时电路状态的观察与相关参数的测定,由测量表计与示波器构成:
S1:示波器1,用于观察脉冲信号A的波形S2:示波器2,用于观察脉冲信号B的波形V:电压表,用于测定蓄电池系统端电压S3:示波器3,用于观察V的输出波形
A:电流表,用于测定电机等效电源输出的电流S4:示波器4,用于观察A的输出波形S5:示波器5,用于观察IGBT B的工作波形
2 SIMULINK仿真
2.1 原理性仿真实验
基于1中的系统原理电路图进行了计算机仿真实验。
仿真用系统相关参数:电机等效电源电动势E为24V,电感L为0.1mH;脉冲的幅值为5V,周期为0.0002,占空比为50%;蓄电池等效电阻Rb为5Ω,等效电容Cb为100uF,等效电源电动势Eb为30V。仿真结果如下:
①打开IGBTA,关闭IGBTB (调节Pa幅值为5V,Pb幅值为0V),使模拟系统运行于驱动状态。仿真结果显示,电机等效电源输出的电流波形在开始仿真的前几个周期为快速振荡衰减的正弦波,很快变成了一条直线;蓄电池系统端电压波形在开始仿真的前几个周期为快速震荡衰减的正弦波,很快变成了一条直线。
②打开IGBTB,关闭IGBTA (调节Pa幅值为0V,Pb幅值为5V),使模拟系统运行于制动状态。仿真结果显示,电机等效电源输出的电流波形为周期性振荡的尖顶波;蓄电池系统端电压
波形为以恒定斜率单调下降的直线。其中,端电压的最小值仍大于蓄电池系统的额定工作电压。
观察仿真结果不难发现,当系统运行于驱动状态时,蓄电池能输出稳定电压,维持直流电机正常工作;当系统运行于回馈制动状态时,电机输出的电压经升压斩波电路升压后可有效对蓄电池系统充电。虽然充电电压随电机转速下降而降低,但在最小幅值下仍能对蓄电池系统有效充电。
2.2 工程性仿真实验
改变仿真实验中电机的各个参数,使搭建的电路运行于接
近电动汽车实际工作情况的参数条件下。此时,可测量出驱动与制动状态下的系统下运行参数。实验结果如下:
①驱动情况下,蓄电池端电压为312.09V,工作电流为167.36A,扭矩为117.24N?m,电机功率为+49.9kW (正号表示此时电机从系统吸收功率),系统效率为92.65。
②制动情况下,蓄电池端电压为322.59V,工作电流为-55.56A (负号表示与驱动情况下的电流方向相反),扭矩为-51.92N?m (负号表示与驱动情况下的电流方向相反),电机功率为-21.47kW (负号表示此时电机向系统输出功率),系统效率为119.81%(由于电机工作于发电机状态,向系统输出能量,故系统效率超过了100%)。
由上述实验结果可以看出:制动时对电池充电,系统工作电流有所抬升,同时系统工作电流、扭矩以及电机的功率均与驱动相反。同时制动时因为系统能量传递方向与驱动时相反,因此,实际回馈制动时的系统效率为100/119.81=83.46%,可见回馈制动时的系统效率相当可观,在工程上具有可行性。
3 其他相关结论
图1-1 电机回馈制动系统原理示意图
135
实验研究·
上覆盖的塑料布,在法兰的密封槽内涂适当胶,然后放上密封垫。(6)用吊车将套管吊起,在变压器安装孔位置缓缓下降套管,实时监视套管的下落情况,并及时调整套管与升高座的间隙,注意套管下部瓷套不要与套管升高座法兰、互感器碰撞。在套管下落过程中,要始终拉紧引线。在吊装就位时,注意使套管油表向外,且放气塞在最高点。(7)将套管放在套管升高座上,确认安装位置正确,用螺栓紧固。
3.5 低压套管及引出线安装
(1)套管安装前要检查套管表面是否存在伤痕或裂缝;
清洁干净套管、法兰颈部内壁;要求套管试验合格。(2)套管引出线和接线柱根部不要硬拉、扭曲、打折,引出线的外包绝缘完好。(3)套管顶部结构的密封垫安装正确,密封良好,连接引出线时,不要使顶部结构松扣。
3.6 温度计安装(1)温度计安装前应进行校验,导通良好,信号接点应动
作正确;绕组温度计应按厂商规定进行整定。(2)顶盖上的温度计座内应注以变压器油,密封良好,无渗油现象;闲置的温度计座也应密封,不得进水。(3)膨胀式信号温度计的细金属软管不得有压扁或急剧扭曲,其弯曲半径不得小于50mm。
3.7 二次回路接线装配
二次回路接线设有电缆槽盒,电缆、电缆槽盒的装配可分
段进行:(1)通过油箱上的底板将电缆槽盒盒底固定在油箱上。(2)沿电缆槽盒盒底将二次控制电缆码好。(3)最后扣上电缆槽盒盒盖,并用螺栓将盒盖、盒底固定在一起。(4)将绕组温度计、油面温度计、电阻温度计、压力释放器、油位计及电流互感器的电气接点引至端子箱。
4 变压器接地
变压器接地方式一般为变压器本体接地、变压器中性点工作接地及变压器铁心接地。前两种接地要求两点接地,且两点必须从不同的接地点引出,以确保一点损坏断开后变压器仍能接地,正常工作。
5 变压器注油
(1)注油全过程应保持真空,注入油的油温宜高于器身温度,一般为30℃,以驱除器身表面的潮气,提高器身绝缘。(2)注油不应以注油时间来控制,应按油速来控制。静电发生量
大致按油流速三次方比例增加,所以注油速度不宜大于100L/min。(3)真空注油至储油柜接近当前油温所要求的油位,停止抽真空。(4)变压器注油时,宜从下部油阀进油。对导向强油循环的变压器,注油应按制造厂的规定执行。如果油从上部进入,抽真空一定从上面抽,进油也从上面进。(5)变压器本体及各侧绕组,滤油机及油管道应可靠地接地。
6 变压器运行前试验
变压器安装必须按规范要求进行以下项目的严格试验:绝缘油试验;绕组连同套管的直流电阻;检查所有分接头的电压比;检查变压器的三相接线组别;测量绕组连同套管的绝缘电阻、吸收比或极化指数;测量绕组连同套管的介质损耗角正切值tan δ;测量绕组连同套管的直流泄漏电流;变压器绕组变形试验;绕组连同套管的交流耐压试验;绕组连同套管的长时感应电压试验带电局部放电试验;检查相位;测量噪音。
7 变压器试运行
变压器一般进行5次空载全电压冲击合闸,第一次受电后持续时间不应少于10min,每次间隔时间宜为5min,应无异常现象;冲击合闸宜在变压器高压侧进行;对中性点接地的电力系统,试验时变压器中性点必须接地;发电机变压器组中间连接无操作断开点的变压器,可不进行冲击合闸试验。无电流差动保护的干式变压器可冲击3次。
8 结语
变压器的安装涉及到诸多的环节和因素,文章只是结合笔者实际工作经验总结出了主要的安装工艺及质量控制措施,而在具体的实践过程中,由于所处环境、条件及变压器型号的不高,安装方法及质量控制会有所区别,还需结合相关规范及生产商说明书加以执行,以保证变压器的整体安装质量。
[参考文献]
[1]蒙叶.金鸡滩水电站变压器安装施工方法[J].企业科技与发
展,2008,(22).
[2]董宝骅.如何提高变压器的安装水平[J].电力设备2008,9(9).[3]李渝.浅谈电力变压器的安装调试技术[J].机电信息,2010,(30).
(上接第133页)
由上述实验还能得出其他相关结论:
①该系统采用的回馈制动节能方式,不能连续的进行能量回馈。但每逢减速行驶或刹车等情况时,都能发挥作用,节约能量。对于比较复杂的路段,即需要频繁启停、减速、刹车的地方,如繁华地区、山区丘陵地带等,节能效果会更加明显。
②实验和理论计算都已证实,缓制动比急制动具有更高的能量回收率,所以在实际应用本系统于电动车时,建议刹车应尽量采取缓制动。
③电动机回馈制动系统可根据型号适用于各类直流电机电动车,例如电动自行车、电动汽车。在未来,对本产品进行相关技术改造后,可适用于各类旋转设备上,以达到节能减排,降
低制动磨损的作用,如金属加工,冶金,矿业,航天,交通等。技术应用的关键是提高系统效率与有效搭建不同系统之间接口。
4 结语
通过仿真实验可以看到,回馈制动系统可以有效利用电动车制动时的残余动能,并具有可观的系统效率。综上所述,该系统具有工程应用价值。
[参考文献]
[1]吴传宇.电动自行车回馈制动滑模控制研究,福建农林大学机电工程
学院,机械工程与自动化,第3期,2010年6月.
三相异步电动机Matlab仿真
中国石油大学胜利学院综合课程设计总结报告 题目:三相异步电机直接启动特性实验模型 学生姓名:潘伟鹏 系别:机械与电气工程系 专业年级: 2012级电气工程专业专升本2班 指导教师:王铭
2013年 6 月 27日
一、设计任务与要求 普通异步电动机直接起动电流达到额定电流的6--7倍,起动转矩能达到额定转矩的1.25倍以上。过高的温度、过快的加热速度、过大的温度梯度和电磁力,产生了极大的破坏力,缩短了定子线圈和转子铜条的使用寿命。但在电网条件和工艺条件允许的情况下,异步电动机也可以直接启动。本次课程设计通过MATLAB软件建模模拟三相异步电动机直接启动时的各个元器件上的电量变化。 参考: 电力系统matlab仿真类书籍 电机类教材 二、方案设计与论证 三相异步电动机直接起动就是利用开关或接触器将电动机的定子绕组直接接到具有额定电压的电网上。 由《电机学》知三相异步电动机的电磁转矩M与直流电动机的电磁转矩有相似的表达形式。它们都与电机结构(表现为转矩常数)和每级下磁通有关,只不过在三相异步电动机中不再是通过电枢的全部电流,而是点数电流的有功分量。三相异步电机电磁转矩的表达式为: (1-1)式中——转矩常数 ——每级下磁通 ——转子功率因数 式(1-1)表明,转子通入电流后,与气隙磁场相互作用产生电磁力,因此,反映了电机中电流、磁场和作用力之间符合左手定则的物理关系,故称为机械特性的物理表达式。该表达式在分析电磁转矩与磁通、电流之间的关系时非常方便。 从三相异步电动机的转子等值电路可知, (1-2) (1-3)将式(1-2)、(1-3)代入(1-1)得:
基于simulink直流电机调速系统开题报告剖析
Xxxx大学 本科毕业论文开题报告 基于Simulink的直流电机转速控制仿真研究 学号: xxx 姓名: 导师: 学院: 专业: 日期:
目录 一、选题依据、目的和意义 二、国内外研究现状及发展趋势 三、研究的主要内容及实验方法 四、目标,主要特色及工作进度 五、主要参考文献
一、选题依据、目的和意义 直流电机分为有刷和无刷两种,无刷直流电机(BLDCM)是在有刷直流电动机的基础上发展来的,但它的驱动电流是不折不扣的交流;无刷直流电机又可以分为无刷速率电机和无刷力矩电机。一般地,无刷电机的驱动电流有两种,一种是梯形波(一般是“方波”),另一种是正弦波。有时候把前一种叫直流无刷电机,后一种叫交流伺服电机,确切地讲是交流伺服电动机的一种。 无刷直流电机在重量和体积上要比有刷直流电机小的多,相应的转动惯量可以减少40%—50%左右。由于永磁材料的加工问题,致使无刷直流电机一般的容量都在100kW以下。这种电动机的机械特性和调节特性的线性度好,调速范围广,寿命长,维护方便噪声小,不存在因电刷而引起的一系列问题,所以这种电动机在控制系统中有很大的应用潜力。 1.1选题依据 无刷直流电动机因卓越的性能和不可替代的技术优势倍受人们的关注,特别是自70年代后期以来伴随着永磁材料技术、计算机及控制技术等支撑技术的快速发展及微电机制造工艺水平的不断提高,无刷直流电动机在高性能中、小伺服驱动领域获得广泛应用并日趋占据主导地位。随着无刷直流电机应用领域的不断扩大,要求控制系统设计简易、成本低廉、控制算法合理。建立无刷直流电机控制系统的仿真模型,可以有效的节省控制系统设计时间,及时验证系统的控制算法,同时可以充分利用计算机仿真的优越性,很方便的改变系统的结构,加入不同的扰动和参数变化,可以更好的考察系统在不同结构和不同工况下的静、动特性。因此如何建立无刷直流电机控制系统的仿真模型成为迫切需要解决的关键问题。 1.2目的和意义 无刷直流电动机具有体积小、重量轻、效率高、惯量小和控制精度高、无滑动接触和换相火花、可靠性高、使用寿命长及噪声低等优点,在航空航天、伺服控制、数控机床、机器人、电动汽车、计算机外围设备和家用电器等方面都获得了广泛应用。随着无刷直流电机应用领域的不断扩大,要求控制系统设计简易、成本低廉、控制算法合理、开发周期短。通过建立有效的无刷直流电动机系统仿真模型,可以
基于Matlab的直流电机速度控制
基于Matlab的直流电机速度控制
系统仿真 课程设计报告 设计题目:基于Matlab的直流电机速度控制 专业:自动化 学生姓名: 班级学号: 指导教师: 开课日期2013年 7 月 1 日至2013年 7 月 13 日南京邮电大学自动化学院
一、课程设计题目 控制系统的执行机构常用直流电机来驱动,电路和原理示意图如下所示 其开环传递函 数 为 ()()0001 .0)15.0)(1.001.0(01 .02+++= +++= s s K R Ls b Js K V θ ,请用时域分析方法设计PID 控制器,使系统满足下列性能指标要求:当仿真输入是单位阶跃信号时,电机输出转速调整时间小于2秒,超调小于5%,稳态误差小于1%。 要求给出详细的设计步骤,matlab 源码及仿真曲线。 二、实验原理 本报告首先介绍了直流电动机的物理模型,并测量计算了它的具体参数。然后根据牛顿第二定律和回路电压法分别列写运动平衡方程式和电机电枢回路方程式,从而通过一些数学变换抽象出了以电压为输入、转速为输出、电流和转速为状态变量的数学模型。借助MATLAB 设计simulink 模块调整PID 模块的各项系数,使系统的阶跃响应达到了设计指标。 1、建立该系统的时域数学模型 由克希霍夫定律得: V=R*i+L +e 直流电机转矩和电枢电流关系为 T=Kt*I 电枢旋转产生反电动势与旋转运动角速度的关系为 e=
由牛顿定律,转子力矩平衡关系为 其中,T:负载转矩,:负载电流 V(s)=R*I(s)+L*sI(s)+E(s) 拉式变换:E=Ke(s) 划去中间变量得: 开环传递函数为: 2、PID控制器的功能 比例环节:Kp增大等价于系统的开环增益增加,会引起系统响应速度加快,稳态误差减少,超调量增加。当Kp过大时,会使闭环系 统不稳定; 积分环节:相当于增加系统积分环节个数,主要作用是消除系统的稳态误差。积分环节作用的强弱取决于积分时间常数Ti,Ti增大, 系统超调量变小,响应速度变慢; 微分环节:主要作用是提高系统的响应速度,同时减少系统超调量,抵消系统惯性环节的相位滞后不良作用,使系统稳定性明显改善。 Td偏大或偏小,都会使超调量增大,调整时间加长。由于该环节所产 生的控制量与信号变化速率有关,故对于信号无变化或变化缓慢的系 统微分环节不起作用。 三、设计步骤 方法1: 搭建simulink模块,利用经验调节法整定PID参数,使整个系统满足调节时间小于2秒,超调小于5%,稳态误差小于1%。 1、搭建的simulink模块图如下:
电机MATLAB仿真实验
实验一单相变压器空载仿真实验 一、实验目的 1 用仿真的方法了解并求取变压器的空载特性。 2 通过变压器空载仿真了解并求取变压器的参数与损耗。 二、预习要点 1 变压器空载运行有什么特点? 2 在变压器空载实验仿真中,如何通过仿真测取变压器的铁耗。 三、仿真项目 1 完成变压器空载运行仿真模型的搭建与参数设定。 2 仿真测取空载特性U0=f(I0),P0= f(U0),cosΦ0= f(U0)。 四、仿真方法 1 仿真模块 三相交流电压源 可饱与单相变压器 交流电压表 交流电流表 有功、无功功率表 示波器 显示测量数据 计算均方根值(有效值)模块 电力系统仿真环境模块(电力系统仿 真模型中必须含有一个) 2 仿真模型
三 相 交 流 电 压 源 V 1 W A V2 U V W P0 U0 I0 a A x X 55V U AX * * 图1 变压器空载实验接线图 图2 单相变压器空载仿真模型示例图 图3 变压器参数设置示例图(右侧饱与曲线数据请输入到左侧Saturation Characteristic一栏) 3 空载仿真 1)根据图1的接线图进行仿真模型搭建,搭建仿真模型如图2所示,所有频率的设置均改成50。 2)对单相变压器以及其她元器件模块的参数设置,选定额定电压,变压器变比等。设定其额定容量S N=77 V A,U1N/U2N=55/220V。变压器低压侧接电源,高压侧开路。变压器参数设置如图3所示。
3)可自行根据需要选择需要测量的波形以及有效值量,加入示波器以及计算模块进行测量并设定仿真时间。 4)调节电压源电压,调节范围在(1、25~0、2)U N范围内,测取变压器的U0,I0,P0,cosΦ0以及二次侧电压U AX等数据。 5)测取数据时,在额定电压附近侧的点较密,共测取10组数据记录于下表。 表1 空载实验数据 五、实验报告 1、完成表1 2、绘制U0-I0特性曲线 3、计算变压器变比 4、计算低压侧的励磁参数
经典-同步电机模型的MATLAB仿真h
安徽工业大学工商学院课程设计(论文)同步电机模型的MATLAB仿真 学生姓名:李春笋 学号:111842161 专业班级:气1142 指导教师:范国伟 2013年12月20日
摘要 采用电力电子变频装置实现电压频率协调控制,改变了同步电机历来的恒速运行不能调速的面貌,使它和异步电机一样成为调速电机大家庭的一员。本文针对同步电机中具有代表性的凸极机,在忽略了一部分对误差影响较小而使算法复杂度大大增加的因素(如谐波磁势等),对其内部电流、电压、磁通、磁链及转矩的相互关系进行了一系列定量分析,建立了简化的基于abc三相变量上的数学模型,并将其进行派克变换,转换成易于计算机控制的d/q坐标下的模型。再使用MATLAB中用于仿真模拟系统的SIMULINK 对系统的各个部分进行封装及连接,系统总体分为电源、abc/dq转换器、电机内部模拟、控制反馈四个主要部分,并为其设计了专用的模块,同时对其中的一系列参数进行了配置。系统启动仿真后,在经历了一开始的振荡后,各输出相对于输出时间的响应较稳定。关键词:同步电机 d/q模型 MATLAB SIMULINK 仿真。 The Simulation Platform of Synchronous Machine by MATLAB Abstract: The utilization of transducer realizes the control of voltage’s frequency. It changes the situation that Synchronous Machine is always running with constant speed. Just like Asynchronous Machine, Synchronous machine can also be viewed as a member of the timing machine. This thesis intends to aim at the typical salient pole machine in Synchronous Machine. Some quantitative analysis are made on relations of salient pole machine among current, voltage, flux, flux linkage and torque, under the condition that some factors such as harmonic electric potential are ignored. These factors have less influence on error but greatly increase complexity of arithmetic. Thus, simplified mathematic model is established on the basis of a, b, c three phase variables. By the Park transformation, this model is transformed to d, q model which, is easy to be controlled by computer. Simulink is used to masking and linking all the parts of the system. The system can be divided into four main parts, namely power system, abc/dq transformation, simulation model of the machine and feedback control. Special blocks are designed for the four parts and a series of parameters in these parts are configured. The results of simulation show that each output has a satisfactory response when there is disturbance. Key Words: Synchronous Machine Simulation d/q Model MATLAB SIMULINK
基于SIMULINK的直流电机驱动控制
毕业论文(设计)题目:直流电机驱动控制 系别:物理与机电工程系 专业:电子信息工程技术 姓名: 卢碧华 学号: 20080623126 指导老师: 龚俊锋 摘要
随着汽车电子器件的飞速发展、车用电控单元(ECU)的日新月异,直流电机在汽车电器设备中的应用受到了越来越多的重视。直流电机具有寿命长、效率高等特点,且适合很多高档汽车。同时,车内环境的复杂很多机械安装的困难,在不宜安装转子磁极位置传感器的地方,必须使用无位置传感器策略驱动直流电机。本文将介绍一种基于Matlab/Simulink的直流电机的仿真方法。基于Matlab/Simulink,本文设计了一个直流电机的控制方案,详细阐述了直流电机的运行原理,并用Matlab/Simulink对其进行了仿真。实验证明,用Matlab/Simulink开发的平台能够有效地实现对直流电机的控制。 关键词: Simulink 直流电机脉冲宽度调制 abstract Along with the rapid development of automobile electronic components, automotive electronic control unit (ECU) everchanging, dc motor vehicle electrical equipment in the application by more and more attention. Dc motor have a long life, the efficiency high characteristic, and suitable for many high-grade car. Meanwhile, the complex environment inside a lot of difficulties, machinery installation shoulds not be installed in the rotor position sensor's place, poles must be used for sensorless strategies driven dc motor. This paper will introduce a method based on Matlab/Simulink of dc motor of the simulation method. Based on Matlab/Simulink, this paper designed a dc motor control plan, this paper expounds the working principles of dc motor with Matlab/Simulink carries on the simulation. Experiments have proved that Matlab/Simulink development platform can effectively achieve the of a dc motor control.
单闭环直流电机调速Simulink仿真
单闭环直流电机调速S i m u l i n k仿真 Revised by Petrel at 2021
直流调速系统及其仿真 首先,我先大致讲一下电机调速的基本原理: 01()d d n a U E I R R R =+++(1) e e E C n K n ==Φ(2) 3) 直流他励电动机供电原理图 由此公式可知直流他励电动机调速方法有: (1) 改变电枢供电电压的调速 (2) 减弱励磁磁通的调速 (3) 改变电枢回路电阻调速 由晶闸管整流装置给直流电动机供电的调速系统简称为V-M 系统,今天我们选用的就是改变 电枢电压的V-M 调速系统。n U 闭环系统的结构图 电压比较环节*n n n U U U =- 放大器ct p n U K U = 晶闸管整流器及触发装置0d s ct U K U = V-M 系统开环机械特性0d d e e U I R E n C C -== 速度检测环节22n tg etg U U C n n ααα=== 式中,p K 为放大器的电压放大系数;s K 为晶闸管整流器及触发装置的电压放大系数;2α为反馈电位器分压比;etg C 为测速发电机额定磁通下的电动势转速比;2etg C αα=为转速反馈系数。
以上就是单电机比较简单的理论,下面我要向大家介绍一下无静差转速负反馈调速系统的构成、建模及仿真。单闭环无静差转速负反馈调速系统的电气原理图如图所示: 系统的建模包括主电路的建模和控制电路的建模两部分。 该系统由给定、速度调节器、同步脉冲触发器、晶闸管整流桥、平波电抗器、直流电动机、速度给定环节、限流环节等部分组成。 (一) 三相交流电源 A 超前C120度,C 超前B120度。 同步脉冲触发器和封装之后的子系统符号 六脉冲触发器需要用三相线电压同步,所以同步电源的任务是将三相交流电源的相电压转换成线电压。图中触发器开关信号block 为0时,开放触发器;为1时,封锁触发器。 晶闸管整流桥及其参数设置 直流电机模块 PID 模块及其参数设置 PI 的控制器可以通过现有的PID 模块进行设置。 限幅器模块及其参数设置 通过对ct U 参数变化范围的探索而知:在单闭环无静差系统中,当ct U 在110~207范围内变化 时,同步脉冲触发器能够正常工作;当ct U 为110时,对应的整流桥输出电压最大;而;而207对 应的输出电压最小。为此,我们将限幅器的上、下限幅值设置为[97,0],用加法器加上偏置“-207”后调整为[-110,-207],再经反相器转换为[110,207]。这样通过限幅器、偏置、反向器等模块的应用,就可将速度调节器的输出限制在使用同步脉冲触发器能够正常工作的范围之内了。 系统的给定信号设置为150rad/s,p K =2,n =40,平波电抗器电感5e-3H ,其他的参数和上一 系统的参数一样。 (二)
单闭环直流电机调速Simulink仿真
单闭环直流电机调速 S i m u l i n k仿真 Prepared on 24 November 2020
直流调速系统及其仿真 首先,我先大致讲一下电机调速的基本原理: 01() d d n a U E I R R R =+++(1) e e E C n K n ==Φ(2) 3) 直流他励电动机供电原理图 由此公式可知直流他励电动机调速方法有: (1) 改变电枢供电电压的调速 (2) 减弱励磁磁通的调速 (3) 改变电枢回路电阻调速 由晶闸管整流装置给直流电动机供电的调速系统简称为V-M 系统,今天我 们选用的就是改变电枢电压的V-M 调速系统。n U 闭环系统的结构图 电压比较环节 *n n n U U U =- 放大器 ct p n U K U = 晶闸管整流器及触发装置 0d s ct U K U = V-M 系统开环机械特性 0d d e e U I R E n C C -== 速度检测环节 22n tg etg U U C n n ααα===
式中,p K 为放大器的电压放大系数;s K 为晶闸管整流器及触发装置的电压放 大系数;2α为反馈电位器分压比;etg C 为测速发电机额定磁通下的电动势转速比;2etg C αα=为转速反馈系数。 以上就是单电机比较简单的理论,下面我要向大家介绍一下无静差转速负反馈调速系统的构成、建模及仿真。单闭环无静差转速负反馈调速系统的电气原理图如图所示: 系统的建模包括主电路的建模和控制电路的建模两部分。 该系统由给定、速度调节器、同步脉冲触发器、晶闸管整流桥、平波电抗器、直流电动机、速度给定环节、限流环节等部分组成。 (一) 三相交流电源 A 超前C120度,C 超前B120度。 同步脉冲触发器和封装之后的子系统符号 六脉冲触发器需要用三相线电压同步,所以同步电源的任务是将三相交流电源的相电压转换成线电压。图中触发器开关信号block 为0时,开放触发 器;为1时,封锁触发器。 晶闸管整流桥及其参数设置 直流电机模块 PID 模块及其参数设置 PI 的控制器可以通过现有的PID 模块进行设置。 限幅器模块及其参数设置
电机MATLAB仿真实验
(此文档为Word格式,下载后可以任意编辑修改!)(文件备案编号:) 单相变压器空载仿真实验 工程名称: 编制单位: 编制人: 审核人: 批准人: 编制日期:年月日
单相变压器空载仿真实验 一、实验目的 1 用仿真的方法了解并求取变压器的空载特性。 2 通过变压器空载仿真了解并求取变压器的参数和损耗。 二、预习要点 1 变压器空载运行有什么特点? 2 在变压器空载实验仿真中,如何通过仿真测取变压器的铁耗。 三、仿真项目 1 完成变压器空载运行仿真模型的搭建和参数设定。 2 仿真测取空载特性U0=f(I0),P0= f(U0),cosΦ0= f(U0)。 四、仿真方法 1 仿真模块 2 仿真模型
AX 图1 变压器空载实验接线图 图2 单相变压器空载仿真模型示例图 图3 变压器参数设置示例图(右侧饱和曲线数据请输入到左侧Saturation Characteristic 一栏) 3 空载仿真 1)根据图1的接线图进行仿真模型搭建,搭建仿真模型如图2所示,所有频率的设置均改成50。 2)对单相变压器以及其他元器件模块的参数设置,选定额定电压,变压器变比等。设定其额定容量S N =77 V A ,U 1N /U 2N =55/220V 。变压器低压侧接电源,高压侧开路。变压器参数设置如图3所示。
3)可自行根据需要选择需要测量的波形以及有效值量,加入示波器以及计算模块进行测量并设定仿真时间。 4)调节电压源电压,调节范围在(1.25~0.2)U N范围内,测取变压器的U0,I0,P0,cosΦ0以及二次侧电压U AX等数据。 5)测取数据时,在额定电压附近侧的点较密,共测取10组数据记录于下表。 表1 空载实验数据 五、实验报告 1. 完成表1 2. 绘制U0-I0特性曲线 3. 计算变压器变比 4. 计算低压侧的励磁参数
单闭环直流电机调速Simulink仿真
直流调速系统及其仿真 首先,我先大致讲一下电机调速的基本原理: 01()d d n a U E I R R R =+++(1) d E I R =+ e e E C n K n ==Φ(2) 3) 直流他励电动机供电原理图 由此公式可知直流他励电动机调速方法有: (1) 改变电枢供电电压的调速 (2) 减弱励磁磁通的调速 (3) 改变电枢回路电阻调速 由晶闸管整流装置给直流电动机供电的调速系统简称为V-M 系统,今天我们选用的就 是改变电枢电压的V-M 调速系统。 闭环系统的结构图 电压比较环节 * n n n U U U =- 放大器 ct p n U K U = 晶闸管整流器及触发装置 0d s ct U K U = V-M 系统开环机械特性 0d d e e U I R E n C C -= = 速度检测环节 22n tg etg U U C n n ααα=== 式中,p K 为放大器的电压放大系数;s K 为晶闸管整流器及触发装置的电压放大系数;2α为反馈电位器分压比;etg C 为测速发电机额定磁通下的电动势转速比;2etg C αα=为转速反 DC a 1 E Φ
馈系数。 以上就是单电机比较简单的理论,下面我要向大家介绍一下无静差转速负反馈调速系统的构成、建模及仿真。单闭环无静差转速负反馈调速系统的电气原理图如图所示: 系统的建模包括主电路的建模和控制电路的建模两部分。 该系统由给定、速度调节器、同步脉冲触发器、晶闸管整流桥、平波电抗器、直流电动机、速度给定环节、限流环节等部分组成。 (一) 三相交流电源 A超前C120度,C超前B120度。
电机控制系统与simulink仿真
电机控制系统与simulink仿真 笔名:小san 【摘要】对simulink特点、以及工作原理进行简单的概述,并将simulink 仿真用于电机控制系统仿真研究中,同时以一个具体实例较为深入地对其进 行说明。 【关键词】simulink电机仿真 1、引言 系统仿真的通俗说法就是模拟实验,simulink是MATLAB的仿真工具箱,它从编程转向模型构造,快速、准确的实现了动态系统建模和仿真。Simulink 在建模仿真中支持各类系统,如线性系统、非线性系统、混合系统、连续和离散系统等,为我们提供了不少基本模块,我们可以根据需要从库浏览器里复制出模块,并进行修改参数就可以得到我们要的模型了,从而轻松有效的完成系统仿真。 目前,电机控制系统越来越复杂,同时也不断有新的控制算法被采用。仿真是对其进行研究的一个重要的、不可缺少的手段,而值得考虑的是采用何种软件才使得仿真方便、快速、准确且容易收敛和计算精度。simulink软件在其仿真研究中被成功方便地应用在电动车电驱动系统的研制过程中。 2、simulink 仿真软件的简介 (1)simulink的特点 a、simulink仿真软件最大的特点是非常直观,直接面向“方框图”,它可 完成控制系统模型输入与仿真分析,在simulink界面下,可以直接用鼠标“画” 出所需要的控制系统模型,然后利用simulink提供的功能来对系统进行仿真或线性化分析。这样无论多么复杂的系统,相当容易且直观地就可完成模型的输入和仿真计算,适用于科学研究与工程设计。仿真过程中和结束后都有示波器供查看、分析,所有数据都在内存,可存贮在磁盘中。 b、simulink仿真软件工具带有相应的系统模型库,当进行模型输入时可
直流电动机的MATLAB仿真..
第一章课程设计内容及要求 1. 直流电动机的机械特性仿真; 2. 直流电动机的直接起动仿真; 3. 直流电动机电枢串联电阻启动仿真; 4. 直流电动机能耗制动仿真; 5.直流电动机反接制动仿真; 6. 直流电动机改变电枢电压调速仿真; 7. 直流电动机改变励磁电流调速仿真。 要求:编写M文件,在Simulink环境画仿真模型原理图,用二维画图命令画仿真结果图或用示波器观察仿真结果,并加以分析
第二章直流电动机的电力拖动仿真绘制 1)直流电动机的机械特性仿真 clear; U_N=220;P_N=22;I_N=115; n_N=1500;R_a=0.18;R_f=628; Ia_N=I_N-U_N/R_f; C_EPhi_N=(U_N-R_a*Ia_N)/n_N; C_TPhi_N=9.55*C_EPhi_N; Ia=0;Ia_N; n=U_N/C_EPhi_N-R_a/(C_EPhi_N)*Ia; Te=C_TPhi_N*Ia; P1=U_N*Ia+U_N*U_N/R_f; T2_N=9550*P_N/n_N; figure(1); plot(Te,n,'.-'); xlabel('电磁转矩Te/N.m'); ylabel('转矩n/rpm'); ylim([0,1800]); figure(2); plot(Te,n,'rs'); xlabel('电磁转矩Te/N.m'); ylabel('转矩n/rpm'); hold on; R_c=0; for coef=1:-0.25;0.25; U=U_N*coef; n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'k-'); str=strcat('U=',num2str(U),'V'); s_y=1650*coef; text(50,s_y,str); end figure(3); n=U_N/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'rs'); xlabel('电磁转矩Te/N.m');
直流电动机的MATLAB仿真
... . . 第一章课程设计容及要求 1. 直流电动机的机械特性仿真; 2. 直流电动机的直接起动仿真; 3. 直流电动机电枢串联电阻启动仿真; 4. 直流电动机能耗制动仿真; 5.直流电动机反接制动仿真; 6. 直流电动机改变电枢电压调速仿真; 7. 直流电动机改变励磁电流调速仿真。 要求:编写M文件,在Simulink环境画仿真模型原理图,用二维画图命令画仿真结果图或用示波器观察仿真结果,并加以分析 . 资
第二章直流电动机的电力拖动仿真绘制 1)直流电动机的机械特性仿真 clear; U_N=220;P_N=22;I_N=115; n_N=1500;R_a=0.18;R_f=628; Ia_N=I_N-U_N/R_f; C_EPhi_N=(U_N-R_a*Ia_N)/n_N; C_TPhi_N=9.55*C_EPhi_N; Ia=0;Ia_N; n=U_N/C_EPhi_N-R_a/(C_EPhi_N)*Ia; Te=C_TPhi_N*Ia; P1=U_N*Ia+U_N*U_N/R_f; T2_N=9550*P_N/n_N; figure(1); plot(Te,n,'.-'); xlabel('电磁转矩Te/N.m'); ylabel('转矩n/rpm'); ylim([0,1800]); figure(2); plot(Te,n,'rs'); xlabel('电磁转矩Te/N.m'); ylabel('转矩n/rpm'); hold on; R_c=0; for coef=1:-0.25;0.25; U=U_N*coef; n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te;
MATLAB仿真同步电机模型
电机模型MATLAB仿真 第1章引言 1.1引言 世界工业进步的一个重要因素是过去几十年中工厂自动化的不断完善。在上个世纪70年代初叶,席卷全球世界先进工业国家的石油危机,迫使他们投入大量人力和财力去研究高效高性能的交流调速系统,期望用它来节约能源。经过十年左右的努力,到了80年代大见成效,高性能交流调速系统应用的比例逐年上升,能源危机从而得以缓解。从此以后,高性能交流电机的研究从未再停止过。 而且众所周知,电机的数学模型是多变量、强耦合的非线性系统。对非线性系统中的混沌和分支现象的研究是当前非线性科学研究的热点,在理论上、计算机仿真以及实验上都有了一些研究成果,提出了一些方法。但要从理论上研究一个非线性动力系统,一般比较困难,我们往往希望在保持其动力学特性的基础上,将其简化。要简化一个动力系统,有两条途径:一是减少系统的维数;二是消除非线性[1]。 1.2同步电机概述 同步电机历来是以转速与电源频率严格保持同步而著称的,只要电源频率保持恒定,同步电动机的转速就绝对不变。小到电钟和记录仪表的定时旋转机构,大到大型同步电动机直流发电机组,无不利器转速恒定的特点。除此以外,同步电动机还有一个突出的优点,就是可以控制励磁来调节它的功率因数,可使功率因数高到1.0甚至超前。在一个工厂中只需要少数几台大容量恒转速的设备(例如水泵、空气压缩机等)采用同步电动机,就足以改善全厂的功率因数。由于同步电动机起动费事、重载有振荡以至于失步的危险,因此除了上述要求以外,一般的工业设备很少应用。 自从电力电子变频技术蓬勃发展以后,情况就完全改变了。采用电压频率协调控制后,同步电动机便和同步电动机一样成为调速电机大家庭的一员。原来阻碍同步电动机广泛应用的问题已经得到解决。例如起动问题,既然频率可以由低调到高,转速也就逐渐升高,不需要任何其他起动措施,甚至有些容量达数万千瓦的大型高速拖动电机,还专门配上变频装置
电机制动方式的SIMULINK仿真
扬州大学 专业软件应用综合设计报告 水能学院11级电气专业题目直流电机制动仿真设计 学生 ** 学号111704*** 指导教师张老师 2013年12 月30日
目录 1引言 (5) 2设计依据及框图 (6) 2.1设计平台 (6) 2.2设计思想 (9) 2.3设计结构框图或流程图 (10) 2.4各模块功能简介 (18) 3软件调试分析 (22) 4结语 (27) 4.1结论与讨论 (27) 参考文献 (27) 致谢 (29)
直流电动机综合仿真设计三 摘要:对于制动,直流电机制动有很多种方式,一般可以分为三类,能耗制动,反接制动,回馈制动。例如他励直流电机能耗制动在工程上得到了广泛的使用,因为这种制动方式,简单可靠,安全经济。能耗制动原理其实就是将电流方向反向,产生相反的电磁转矩,从而产生一个与转速方向相反的力矩,达到减速制动的目的。而我们通过MATLAB仿真,在图示上直观的解释了他励直流电动机的停机过程,讲解了在不同的阶段,电动机的工作特性曲线的变动,在关键点的(电动机的瞬时态)讲解。并且运用之前所介绍的基础知识来解 T,TL,To之间的关系 本文针对直流电动机能耗制动、反接制动、回馈制动,在忽略一部分对误差影响较小而使算法复杂度大大增加的因素,对电动机制动前后电压、电流、及转速进行对比研究分析,再使用MATLAB 中用于仿真模拟系统的SIMULINK对系统的各个部分进行封装及连接,并为其设计了专用模块,同时对其中的一系列参数进行了配置。系统启动仿真后,各项参数都平稳地达到预期值。实际工程上通过系统模拟实验表明:该系统设计合理,自动化程度高,实验过程时间短,工作稳定可靠,基本满足设计相关要求。 关键字:直流电机;制动方式;MATLAB;SIMULINK
双闭环直流电机调速系统的SIMULINK仿真实验
双闭环直流电机调速系统的SIMULINK仿真实验
双闭环直流电机调速系统的SIMULINK仿真实验 魏小景张晓娇刘姣 (自动化0602班) 摘要:采用工程设计方法对双闭环直流调速系统进行设计,选择调节器结构,进行参数的计算和校验;给出系统动态结构图,建立起动、抗负载扰动的Matlab Simulink 仿真模型.分析系统起动的转速和电流的仿真波形 ,并进行调试 ,使双闭环直流调速系统趋于合理与完善。 关键词:双闭环调速系统;调节器;Matlab Simulink 建模仿真 1.引言 双闭环直流调速系统是目前直流调速系统中的主流设备,具有调速范围宽、平稳性好、稳速精度高等优点,在理论和实践方面都是比较成熟的系统,在拖动领域中发挥着极其重要的作用。由于直流电机双闭环调速是各种电机调速系统的基础,直流电机双闭环调速系统的工程设计主要是设计两个调节器。调节器的设计一般包括两个方面:第一选择调节器的结构,以确保系统稳定,同时满足所需的稳态精度. 第二选择调节器的参数,以满足动态性能指标。本文就直流电机调
速进行了较系统的研究,从直流电机的基本特性到单闭环调速系统,然后进行双闭环直流电机设计方法研究,最后用实际系统进行工程设计,并采用Matlab/Sim-ulink 进行仿真。 2.基本原理和系统建模 为了实现转速和电流两种负反馈分别起作用,在系统中设置了两个调节器,分别调节转速和电流,二者之间实行串联连接. 把转速调节器ASR 的输出当作电流调节器ACR 的输入,再用电流调节器的输出去控制晶闸管整流器的触发装置GT ,TA 为电流传感器,TG 为测速发电机. 从闭环结构上看,电流调节环在里面,叫做内环,转速调节环在外边叫做外环,这样就形了转速、电流双闭环调速系统。如图所示: 图1 直流电机双闭环调速系统的动态结构图 3.系统设计 调速系统的基本数据如下:晶闸管三相桥式全控整流电路供电的双闭环直流调速系统, 系统参 *n U 11on T s +()ACR W s 11oi T s +1s s K T s +()ASR W s 11l R T s +1oi T s β +1 on T s α+d I C U dL I n 0 d U 转速环 电流环 *i U 1m e R T s C
电机制动方式的SIMULINK仿真
目录 1引言 (5) 2设计依据及框图 (6) 2.1设计平台 (6) 2.2设计思想 (9) 2.3设计结构框图或流程图 (10) 2.4各模块功能简介 (18) 3软件调试分析 (22) 4结语 (27) 4.1结论与讨论 (27) 参考文献 (27) 致谢 (29)
直流电动机综合仿真设计三 摘要:对于制动,直流电机制动有很多种方式,一般可以分为三类,能耗制动,反接制动,回馈制动。例如他励直流电机能耗制动在工程上得到了广泛的使用,因为这种制动方式,简单可靠,安全经济。能耗制动原理其实就是将电流方向反向,产生相反的电磁转矩,从而产生一个与转速方向相反的力矩,达到减速制动的目的。而我们通过MATLAB仿真,在图示上直观的解释了他励直流电动机的停机过程,讲解了在不同的阶段,电动机的工作特性曲线的变动,在关键点的(电动机的瞬时态)讲解。并且运用之前所介绍的基础知识来解T,TL,To之间的关系 本文针对直流电动机能耗制动、反接制动、回馈制动,在忽略一部分对误差影响较小而使算法复杂度大大增加的因素,对电动机制动前后电压、电流、及转速进行对比研究分析,再使用MATLAB 中用于仿真模拟系统的SIMULINK对系统的各个部分进行封装及连接,并为其设计了专用模块,同时对其中的一系列参数进行了配置。系统启动仿真后,各项参数都平稳地达到预期值。实际工程上通过系统模拟实验表明:该系统设计合理,自动化程度高,实验过程时间短,工作稳定可靠,基本满足设计相关要求。 关键字:直流电机;制动方式;MATLAB;SIMULINK
Abstract: For braking , DC There are many ways moving mechanism , can generally be divided into three categories , dynamic braking , reverse braking , regenerative braking . He excited DC motor braking energy on the project has been widely used because this braking mode , simple, reliable , safe and economical. In fact, the principle of dynamic braking is to reverse current direction , the opposite of the electromagnetic torque and the rotational speed to generate a torque in the opposite direction , to achieve the purpose of the braking deceleration . By MATLAB simulation, the icon intuitive explanation excited DC motor shutdown process , to explain the changes in the different stages of the motor operating characteristics curve at key points ( motor instantaneous state ) to explain. Before applying the basics and introduced to solve the relationship between T, TL, To between In this paper, the DC motor braking , reverse braking , regenerative braking , part of a small error in ignoring the fallout of greatly increased complexity of the algorithm factors , before and after the motor brake voltage, current , and speed of a comparative study analysis , and use SIMULINK MATLAB simulation system used for the various parts of the system are encapsulated and connectivity , and to design a specific module , while a series of parameters for which the configuration. After starting the system simulation , the parameters are smoothly reaches zero. Through the system simulation experiments show that: the system is designed, high degree of automation , the experiment short time , stable and reliable , basically meet the design requirements. Keywords: DC; BRAKING; MATLAB; SIMULINK
直流电机simulink
DC Machine Implement separately excited DC machine (continuous and discrete blocks) Library Machines Description The DC Machine block and the Discrete DC Machine block (also in the Machines library) both implement a separately excited DC machine. The DC Machine block implements a continuous model, and the Discrete DC Machine block implements a discrete model. The following description applies to both blocks. An access is provided to the field terminals (F+, F-) so that the machine model can be used as a shunt-connected or a series-connected DC machine. The torque applied to the shaft is provided at the Simulink input TL. The armature circuit (A+, A-) consists of an inductor La and resistor Ra in series with a counter-electromotive force (CEMF) E. The CEMF is proportional to the machine speed. E=Ke*w. KE is the voltage constant and ω is the machine speed. In a separately excited DC machine model, the voltage constant KE is proportional to the field current If: Ke=Laf*If where Laf is the field-armature mutual inductance. The electromechanical torque developed by the DC machine is proportional to the armature current Ia. Te=Kt*Ia. where KT is the torque constant. The sign convention for Te and TL is The torque constant is equal to the voltage constant. The armature circuit is connected between the A+ and A- ports of the DC Machine block. It is represented by a series Ra La branch in series witha Controlled Voltage Source and a Current Measurement block.