第三章 曲面论的基本方程系数的性质(3)
第三章 曲面论
121
2
11121211111112
12
12122122222121212122
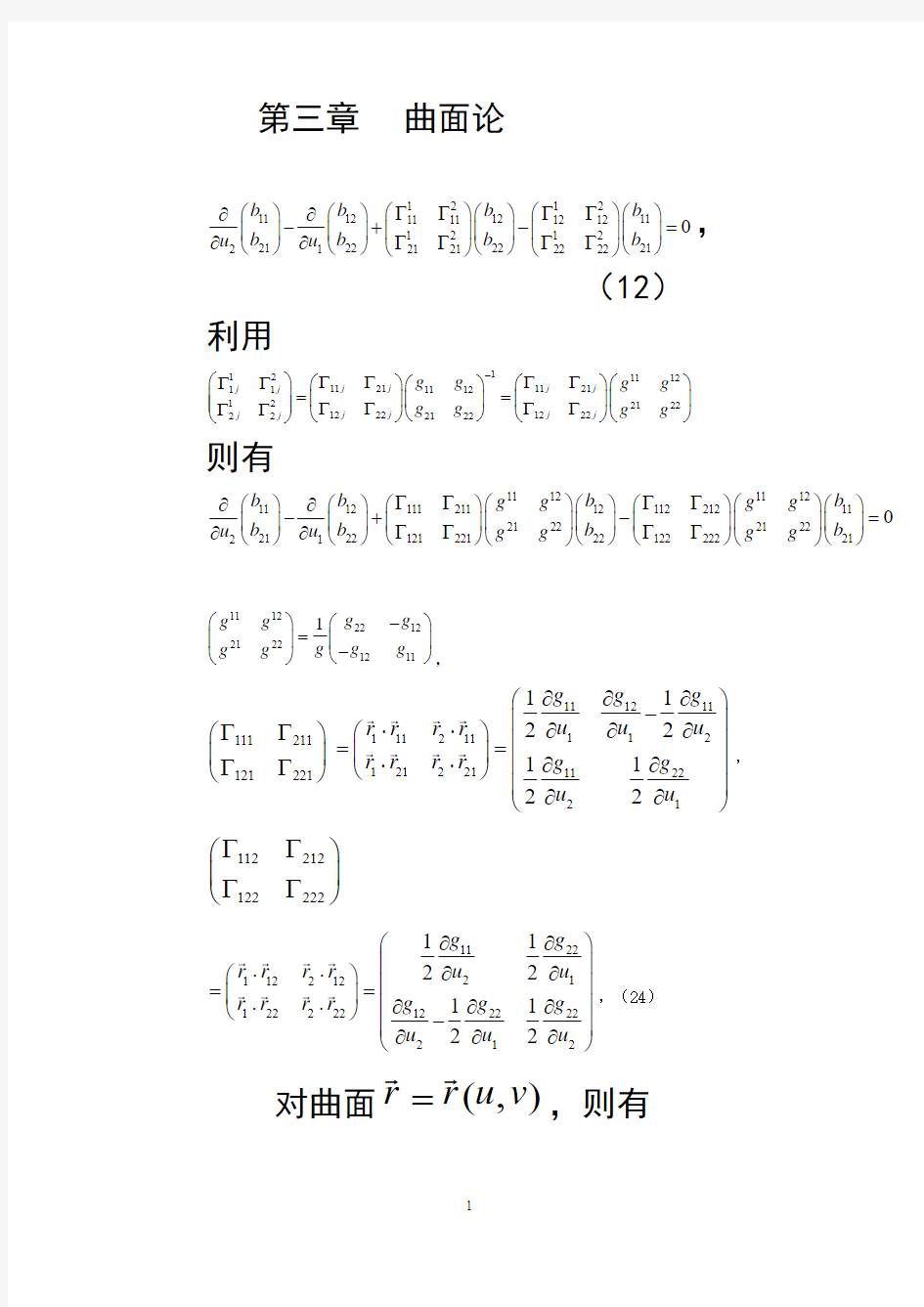
220b b b b b b b b u u ????ΓΓΓΓ??????????-+-= ? ? ? ? ? ???ΓΓΓΓ????????
????,
(12)
利用
1
1
2
11
12112111211111
1212212212221222222122j j j
j j j
j
j j
j j
j g g g g g g g g -ΓΓΓΓ??ΓΓ????????== ? ? ??? ? ?ΓΓΓΓΓΓ????
??????
则有
11
1211
12111211121112112
2121121
2221
22212212122122122
22221210b b b b g g g g b b b b u u g g g g ΓΓΓΓ????????????????
??-+-= ? ? ? ? ? ? ? ?ΓΓΓΓ??????????????
????
111222
12212212
111g g g g g g g g
g -????
= ? ?-??
??,
111211121
221ΓΓ?? ?ΓΓ??11
1211112111211121
22111
22
2111221122g g g u u u r r r r r
r r r g g u u ?????
-
?
???????
?== ? ??????? ?????
, 112
212122
222ΓΓ??
?ΓΓ??
112221112212122
2221222
2221
211221122g g u u r r r r r r r r g g g u u u ???
?
?
?????? ?
==
? ????????- ??????
,(24) 对曲面(,)r r u v =
,则有
2
22
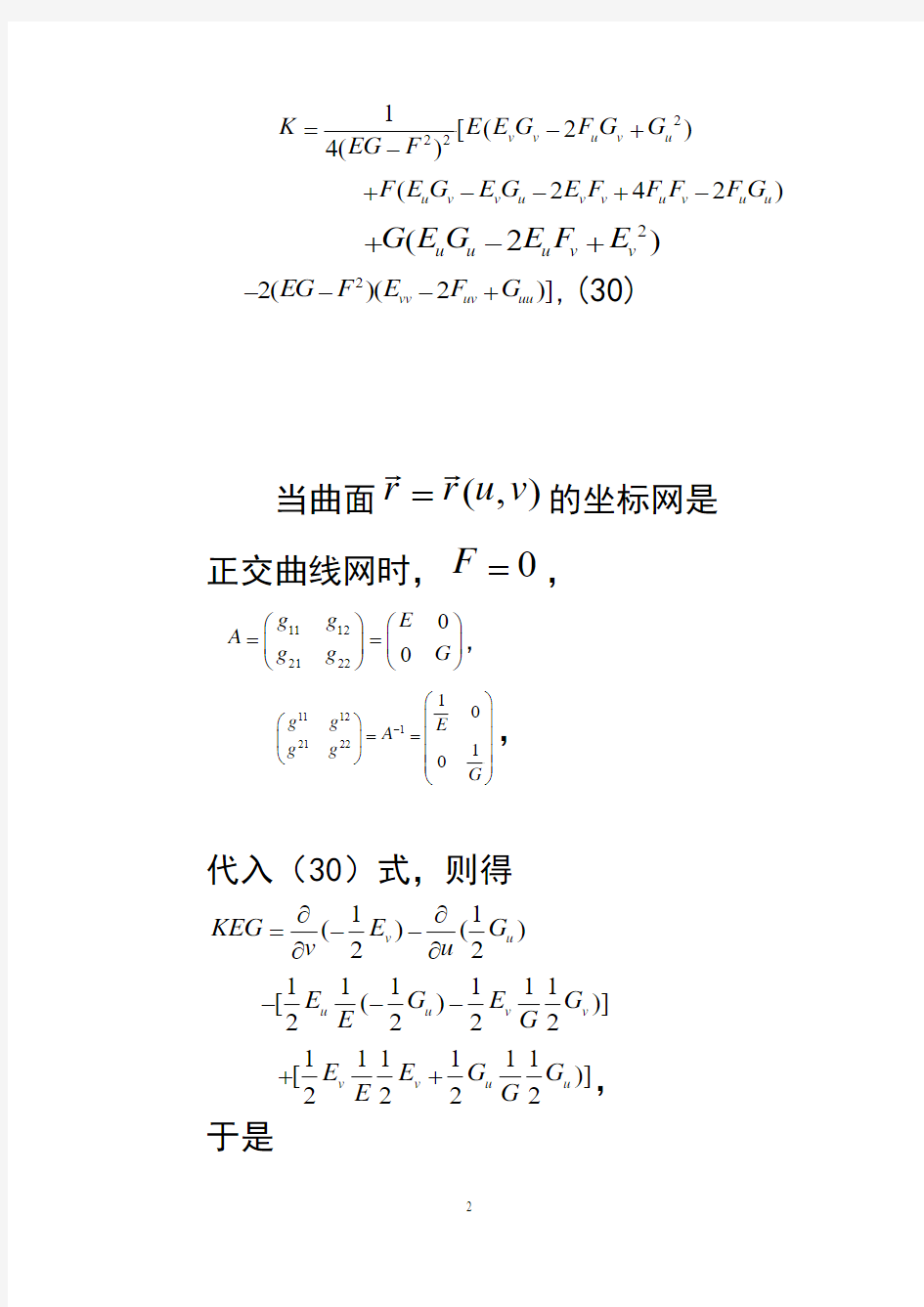
1[(2)4()
v v u v u K E E G F G G EG F =-+-
(242)
u v v u v v u v u u F E G E G E F F F F G +--+-2(2)u u u v v G E G E F E +-+
22()(2)]vv uv uu EG F E F G ---+,(30)
当曲面(,)r r u v =
的坐标网是
正交曲线网时,0F =,
11
1221
2200g g E A g g G ????==
? ???
??, 11
12
1
21221
010
g g E A g
g G -?? ???== ? ? ??? ??
?
,
代入(30)式,则得
11
()()22v u KEG E G v u ??=--??
111111[())]2222u u v v E G E G E G --- 111111[)]2222
v v u u E E G G E G ++, 于是
2
11[
()()]24()
vv uu u u v v v v u u K E G E GG EE G GE E EG G EG EG =-+-+++,
(31)
注意到
1]u v -+
111))]u u v v E =-+
1111()]
uu vv u u v v G E G E =-++
+)()()]uu vv u u u v v v G E G EG E G E EG E G =++++,
故
有
))
1
))]u v
K =+
,
(32)
(验算这个量的散度的动因,是用测地曲率的刘维尔公式,推导高斯-波涅公式时,出现求散度的运算,导致两者的表达方式是一致的。)
4.5常见曲面的参数方程
§4.5 常见曲面的参数方程 本节重点:掌握空间中的三种坐标系:直角坐标系、球坐标系、柱坐标系。 掌握旋转曲面的参数方程的建立。 掌握直纹面的参数方程。 本节难点:旋转曲面的参数方程。直纹面的参数方程。 在第二章中,我们已经引进一般曲面与曲线的参数方程的概念、并给出简单曲面与曲线的参数表示,例如球面与圆柱螺旋线,直线的参数方程。现在再介绍旋转曲面、直纹面的参数方程,同时给出空间中另外两种坐标系:球坐标系与柱坐标系。 (一)旋转曲面的参数方程,球坐标与柱坐标 设旋转曲面的轴为Z 轴,母线Γ的参数方程是 )()()()(b t a t h Z t g Y t f X ≤≤=== 则此旋转曲面可由Γ上每一点生成的纬圆所构成的。由于这纬圆上动点),,(Z Y X P 与它在坐标面XOY 上的投影' P 具有相同的Y X ,坐标,所以Γ上任一点),,(1111Z Y X P 生成的纬圆的参数方程是 ??? ????=+=+=121212121sin cos Z Z Y X Y Y X X θθ )20(πθ<≤ 其中2121Y X +是纬圆半径,即1P 到Z 轴的距离,而参数θ是X 轴到1OP 的转角。设1P 对应的参数是1t ,则 )())(())((112 1212121t h Z t g t f Y X =+=+ 再让1t 在其取值范围内变动,即得这旋转曲面的参数方程 ??? ????=+=+=)(sin ))(())((cos ))(())((2222t h Z t g t f Y t g t f X θθ ???? ??<≤≤≤πθ20b t a (4.5.1) 特别地,当母线P 为坐标面XOZ 上的径线 )(0) (t h Z Y t f X === 时,(4.5.1)成为
第三章第三节
第三章第三节 1。什么叫元组关系演算? 答案1在元组演算中,元组关系演算表达式(简称元组表达式)的一般形式为|t|P(t)其中,t是元组变量,表示一个元数默写固定的元组;P是公式(即计算机语言中条件表达式)。{t|P(t)}表示满足公式P的所有元组t的集合。 答案2 关系演算分为元组关系演算或域关系演算,前者以元组为变量,后者以域为变量。 元组演算表达式的一般形式为:{t|P(t)},其含义为:这是一个元组集合,其中的每个元组t(t是元组变量)满足公式P所规定的条件。 2。元组演算的公式定义法则中,规定的原子公式有那三种形式? (1)R(s)。其中,R是关系名,s是元组变量。 (2)s[i]?u[j]。其中,s和u元组变数,?是算术比较运算符,s[i]和u[j]分别表示是s 第i个分量和u的第j个分量。 (3)s[i]?a或a? u[j]。这是a是常量。 3。元组演算的公式定义法则中,规定的三种形式的原子公式各表示何种命题? (1)R(s)。其中,R是关系名,s是元组变量。它表示这样一个命题:“s是关系R的一个元组” (2)s[i]?u[j]。其中,s和u元组变数,?是算术比较运算符,s[i]和u[j]分别表示是s 第i个分量和u的第j个分量。s[i]?u[j]这样命题:“元组s的第i个分量与元组u的j个分量之间满足?关系。” (3)s[i]?a或a? u[j]。这是a是常量。前一个原子公式s[i]?a表示命题:“元组s的i 个分量值与常量a之间满足?关系”。 4。试述元组演算公式中各运算符优先次序? 优先次序如下:括号、算术比较运算符、 ?∧∨ 5、设有R、S两个关系给出与五种基本关系代数运算相应的原组元算表达式。 (1)RUS可用{t|R(t)∨S(t)}表示 (2)R—S可用{t|R(t)∧?S(t)}表示 (3)R×S可用{t|(?u)(?v)(R(u) ∧ S(v)∧t[1]=u [1]∧ t[2]=u[2] ∧ t[3]=u[3] ∧ t[4]=v[1] ∧ t[5]=v[2]) ∧[2] ∧t[6]=v[3]}表示 (4)设投影操作是∏2,3(R),那么元组表达式写成: {t|(?u)(Ru) ∧t[1] ∧=u[2] ∧t[2]=u[3]} (5)бf(R)可用|t|R}表示,F’是F的等价表示形式。如б2=’d’可写成{t|R(t)∧t[2]=’d’}。用 6。证明合并运算的元组元算表达式与相应关系代数表达式的等价性。
常见的空间曲面与方程
常见的空间曲面与方程 常见的空间曲面有平面、柱面、锥面、旋转曲面和二次曲面。 1. 平面 空间中平面的一般方程为 0a x b y c z d +++= 其中,,a b c 均为常数,且,,a b c 不全为零。 例如,1x y z ++=(图8-6(a )),0x =(图8-6(b ))均表示空间中的平面, z yoz 平面(x =0) y y x 图8-6(a ) 图8-6 (b) 图8-6 2. 柱面 与给定直线L 平行的动直线l 沿着某给定的曲线C 移动所得到空间曲面,称为柱面, l 为母线,C 为准线。 如图8-7所示 图8-7 图8-8
例如,222x y R +=表示空间中母线平行于z 轴,准线是xoy 平面上的圆222x y R +=的 圆柱面的方程,简称圆柱面图(8-8)。 3. 二次曲面 三元二次方程 222 1231 2 31230a x a y a z b x y b y z b z x c x c y c z d +++ ++++++= 所表示的曲面称为二次曲面,其中,,(1,2,3),i i i a b c i d =均为常数,且,,i i i a b c 不全为0. 二次曲面有以下几种标准形式,它们分别为: 球面: 图8-9 椭球面:222 2221(,,0)x y z a b c a b c ++=>图8-10 图8-9 图8-10 单叶双曲面:222 2221(,,0)x y z a b c a b c -+=>图8-11 双叶双曲面:222 2221(,,0)x y z a b c a b c +-=->图8-12 2222(0)x y z R R + += >x z
第三章采购需求与技术参数
第三章采购需求与技术参数 一、采购设备数量及技术参数 1、第一标段设备参数与要求 (一)设备名称:直接数字化X线摄影系统(DR) (二)数量:4台单价:41万元预算金额:164万元 (三)配送地点:双槐树、东明、城关镇、横涧 (四)技术参数及要求: 1.总体要求 1.1 设备名称:数字化医用X射线摄影设备(DR) 1.2 设备用途:满足全身所有部位数字摄影的需求 1.3设备机械形态:为多功能双立柱形态、固定式床体设计,非悬吊或U型臂结构 ★1.4 整体要求:为保证整机兼容及售后保障,整套设备中的高压发生器、平板探测器、机械系统、限束器、图像采集系统为同一制造商,并提供第三方检测证明材料。 ★1.5 投标产品入选2018年优秀国产医疗设备遴选目录(需提供中国医学装备协会证书) ★1.6 投标产品具备中国环境标志产品认证(需提供中国环境标志产品认证证书) 2.技术性能要求 2.1高压发生器 2.1.1 高频功率:≥50KW 2.1.2 管电压可调范围:≥40-150KV 2.1.3 最大输出电流:≥630mA 2.1.4 最大mAs:≥700mAs 2.1.5 最短曝光时间:≤1ms 2.1.6 最小电流时间积:≤0.2mAs ★2.1.7采用平板探测器探测实现自动曝光(AEC)控制功能,非物理电离室结
构,(需提供证明材料) 2.1.8 高压发生器的操作与控制系统完全与主机集成,在图像采集工作站上控制曝光参数 ★2.1.9高压发生器与设备整机为同一生产厂家。(需提供高压发生器医疗器械注册证证明文件) 2.2平板探测器: 2.2.1工作方式:无线便携式,可从床下或胸片架中随意取出,轻松完成一些急症、重症病人不能移动的拍摄工作 ★2.2.2传输方式:无线传输 2.2.3材料:非晶硅+碘化铯 ★2.2.4 有效面积≥17×17英寸 2.2.5 有效数据位数:≥14bit 2.2.6 最大空间分辨率:≥ 3.6lp/mm 2.2.7 总像素:≥800万 ★2.2.8 像素尺寸:≤140μm 2.2.9 平板探测器表面承重:≥100kg 3. X射线管: 3.1 双焦点:小焦点≤0.6mm;大焦点≤1.2mm 3.2 最大电压:≥150kV 3.3最大电流:≥630mA ★3.4 最大热容量:≥150kHU 4. 摄影床及胸片架: 4.1 类型:落地式、不采用U臂或UC臂等其他机架 4.2床面板纵向移动范围≥900mm 4.3床面板横向移动范围≥210mm 4.4立柱上下移动范围≥1190mm 4.5球管焦点距地面最低距离≤580mm 4.6立柱纵向移动范围≥1400mm 4.7球管旋转范围≥±135度
第三章 常见曲面球面和旋转面
第三章 常 见 曲 面 §3.1 球面和旋转面 1.1球面的普通方程 球面方程的建立 首先建立球心在点()0000,,z y x M ,半径为0R ≥的球面方程。根据以下充分必要条件 (,,)M x y z 在球面上0M M R ?=, 得 ()()()2 2 2 2 000x x y y z z R -+-+-=, (3.1) 展开得 2221232220,x y z b x b y b z c ++++++= (3.2) 其中, 2222102030,000,,b x b y b z c x y z R =-=-=-=++-。 (3.1)或(3.2)就是所求球面方程,它是一个三元二次方程,没有交叉项(yz xz xy ,,项),平方项的系数相同。反之,任一形如(3.2)的方程经过配方后可写成: ()()(),0232221232221=---++++++b b b c b z b y b x 当c b b b >++2 32 22 1时,它表示一个球心在()321,,b b b ---,半径为c b b b -++2 32 22 1的 球面;当c b b b =++2 32221时,它表示一个点() 32,1,b b b ---;当c b b b <++2 32221时,它没有轨迹(或者说它表示一个虚球面)。 1.2球面的参数方程,点的球面坐标 如果球心在原点,半径为R ,在球面上任取一点()z y x M ,,,从M 作xOy 面的垂线,垂
足为N N ,连,O M O N 。设x 轴到ON 的角度为?,ON 到OM 的角度为θ(M 在xOy 面上方时,θ为正,反之为负),则有 cos cos ,cos sin ,02,.2 2 sin ,x R y R z R θ?π π θ??πθθ=?? =≤<- ≤≤ ??=? (3.3) (3.3)称为球心在原点,半径为R 的球面的参数方程,有两个参数θ?,,其中?称为经度,θ称为纬度。 球面上的每一个点(除去它与z 轴的交点)对应唯一的对实数()?θ,,因此()?θ,称为球面上点的曲纹坐标。 因为空间中任一点()z y x M ,,必在以原点为球心,以R OM =为半径的球面上,而球面上点(除去它与z 轴的交点外)又由它的曲纹坐标()?θ,唯一确定,因此,除去z 轴外,空间中的点M 由有序三元实数组()?θ,,R 唯一确定。我们把()?θ,,R 称为空间中点M 的球面坐标(或空间极坐标),其中0R ≥,,022 2 π π θ?π-≤≤ ≤≤。 点M 的球面坐标()?θ,,R 与M 的直角坐标()z y x ,,的关系为 cos cos , 0,cos sin , - ,22 sin , 02x R R y R z R θ?π π θ?θθ?π =≥??? =≤≤ ??=≤≤?? (3.4) 1.3曲面和曲线的普通方程、参数方程 从球面的方程(3.2)和球面的参数方程(3.3)看到,一般来说,曲面的普通方程是一个三元方程()z y x F ,,=0,曲面的参数方程是含有两个参数的方程: (,),(,), ,,(,),x x u v y y u v a u b c v d z z u v =?? =≤≤≤≤??=? (3.5) 其中,对于()v u ,的每一对值,由(3.5)确定的点()z y x ,,在此曲面上;而此曲面上任一点的坐标都可由()v u ,的某一对值(3.5)表示。于是通过曲面的参数方程(3.5),曲面上的
高中化学选修3第三章 第三节
第三节金属晶体 [核心素养发展目标] 1.宏观辨识与微观探析:能辨识常见的金属晶体,能从微观角度分析金属晶体中的构成微粒及微粒间的相互作用。2.证据推理与模型认知:能利用金属晶体的通性推导晶体类型,从而理解金属晶体中各微粒之间的作用,并能用均摊法分析其晶胞结构。3.了解混合晶体——石墨的结构与性质。 一、金属键和金属晶体 1.金属键 (1)概念:金属阳离子与自由电子之间的强烈的相互作用。 (2)实质:金属原子脱落下来的价电子形成遍布整块晶体的“电子气”,被所有原子所共用,从而把所有的金属原子维系在一起,形成一种“巨分子”。 (3)特征:金属键没有方向性和饱和性。 2.金属晶体 (1)金属晶体 通过金属阳离子与自由电子之间的较强作用形成的晶体,叫做金属晶体。 (2)用电子气理论解释金属的性质
(1)金属单质和合金都属于金属晶体。 (2)金属晶体中含有金属阳离子,但没有阴离子。 (3)金属导电的微粒是自由电子,电解质溶液导电的微粒是自由移动的阳离子和阴离子;前者导电过程中不生成新物质,为物理变化,后者导电过程中有新物质生成,为化学变化。因而,二者导电的本质不同。 例
1下列关于金属键的叙述中,不正确的是() A.金属键是金属阳离子和自由电子这两种带异性电荷的微粒间的强烈相互作用,其实质与离子键类似,也是一种电性作用 B.金属键可以看作是许多原子共用许多电子所形成的强烈的相互作用,所以与共价键类似,也有方向性和饱和性 C.金属键是带异性电荷的金属阳离子和自由电子间的相互作用,故金属键无饱和性和方向性 D.构成金属键的自由电子在整个金属内部的三维空间中做自由运动 答案 B 解析从基本构成微粒的性质看,金属键与离子键的实质类似,都属于电性作用,特征都是无方向性和饱和性;自由电子是由金属原子提供的,并且在整个金属内部的三维空间内运动,为整个金属的所有阳离子所共有,从这个角度看,金属键与共价键有类似之处,但两者又有明显的不同,如金属键无方向性和饱和性。
5常见曲面的参数方程
§ 常见曲面的参数方程 本节重点:掌握空间中的三种坐标系:直角坐标系、球坐标系、柱坐标系。 掌握旋转曲面的参数方程的建立。 掌握直纹面的参数方程。 本节难点:旋转曲面的参数方程。直纹面的参数方程。 在第二章中,我们已经引进一般曲面与曲线的参数方程的概念、并给出简单曲面与曲线的参数表示,例如球面与圆柱螺旋线,直线的参数方程。现在再介绍旋转曲面、直纹面的参数方程,同时给出空间中另外两种坐标系:球坐标系与柱坐标系。 (一)旋转曲面的参数方程,球坐标与柱坐标 设旋转曲面的轴为Z 轴,母线Γ的参数方程是 )()()()(b t a t h Z t g Y t f X ≤≤=== 则此旋转曲面可由Γ上每一点生成的纬圆所构成的。由于这纬圆上动点),,(Z Y X P 与它在坐标面XOY 上的投影' P 具有相同的Y X ,坐标,所以Γ上任一点),,(1111Z Y X P 生成的纬圆的参数方程是 ??? ????=+=+=121212121sin cos Z Z Y X Y Y X X θθ )20(πθ<≤ 其中2121Y X +是纬圆半径,即1P 到Z 轴的距离,而参数θ是X 轴到1OP 的转角。设1P 对应的参数是1t ,则 )())(())((112 1212121t h Z t g t f Y X =+=+ 再让1t 在其取值范围内变动,即得这旋转曲面的参数方程 ??? ????=+=+=)(sin ))(())((cos ))(())((2222t h Z t g t f Y t g t f X θθ ???? ??<≤≤≤πθ20b t a (4.5.1) 特别地,当母线P 为坐标面XOZ 上的径线
4.5常见曲面的参数方程
§4.5 常见曲面的参数方程 本节重点:掌握空间中的三种坐标系:直角坐标系、球坐标系、柱坐标系。 掌握旋转曲面的参数方程的建立。 掌握直纹面的参数方程。 本节难点:旋转曲面的参数方程。直纹面的参数方程。 在第二章中,我们已经引进一般曲面与曲线的参数方程的概念、并给出简单曲面与曲线的参数表示,例如球面与圆柱螺旋线,直线的参数方程。现在再介绍旋转曲面、直纹面的参数方程,同时给出空间中另外两种坐标系:球坐标系与柱坐标系。 (一)旋转曲面的参数方程,球坐标与柱坐标 设旋转曲面的轴为Z 轴,母线Γ的参数方程是 )()()()(b t a t h Z t g Y t f X ≤≤=== 则此旋转曲面可由Γ上每一点生成的纬圆所构成的。由于这纬圆上动点),,(Z Y X P 与它在坐标面XOY 上的投影' P 具有相同的Y X ,坐标,所以Γ上任一点),,(1111Z Y X P 生成的纬圆的参数方程是 ??? ????=+=+=121212121sin cos Z Z Y X Y Y X X θθ )20(πθ<≤ 其中2121Y X +是纬圆半径,即1P 到Z 轴的距离,而参数θ是X 轴到1OP 的转角。设1P 对应的参数是1t ,则 )())(())((1121212121t h Z t g t f Y X =+=+ 再让1t 在其取值范围内变动,即得这旋转曲面的参数方程 ???????=+=+=)(sin ))(())((cos ))(())((2222t h Z t g t f Y t g t f X θθ ??? ? ??<≤≤≤πθ20b t a (4.5.1) 特别地,当母线P 为坐标面XOZ 上的径线 )(0) (t h Z Y t f X === 时,(4.5.1)成为
第三章技术参数及其它商务要求
第三章技术参数及其它商务要求 一、采购清单 二、配置及技术参数要求: (1)电脑疼痛治疗仪技术参数 1、工作条件 1.1 适于气温-40℃─55℃,相对湿度10─93%的环境下运输; 1.2 能在电源电压220V±22V,50Hz±1Hz,室温5℃─40℃和相对湿度≤80%的环境下工作; 2、技术要求 2.1 可穿入机体有效深度:≥5cm。 2.2 输出波长:0.6—1.7μm。 具有集射式治疗头,散射式治疗头及星状神经节专用治疗头。 *2.3 集射式治疗头发射偏振光口径为ф13mm,输出红外温度0─30级连续可调,最大红外输出温度65℃;波长范围:0.6─1.7μm。 *2.4 散射式治疗头发射红外光口径ф80mm,红外输出温度0─30级连续可调,最大红外输出温度65℃;波长范围:0.6─1.7μm。 *2.5 星状神经节治疗头发射口径ф7mm,红外输出温度0─30级连续可调,最
大红外输出温度65℃:波长范围:0.6─1.7μm。 2.6 偏振光输出模式:连续/间歇两种 (a) 连续模式:在设定的治疗时间内应有连续的光输出; *(b) 间歇模式:间歇输出方式4种,分别为:2:2,1:1, 1:3;2:2─1:1合成模式(单位:秒),由数码显示。 *2.7 治疗时间:0─99分范围连续可调,步长为1分钟。 3、主要配置和附件 主机:1台; (双臂)集射式治疗头:2个; (双臂)散射式治疗头:2个; (双臂)星状神经节专用治疗头2个; (双臂)支臂:2套; 电源线:1条; 说明书及临床应用资料:1本; 消耗品和零备件:保险管2支。 (2)十二道心电图机技术参数和功能特点 导联:12导联同步采集、显示、打印 增益:2.5 mm/mv 、5 mm/mv、10 mm/mv、20mm/mv、10/5 mm/mv、20/10 mm/mv、AGC 数字滤波器:交流滤波:50Hz/60Hz,肌电滤波:25Hz/35Hz/45Hz,漂移滤波:0.05Hz/0.15Hz/0.25Hz/0.50Hz,低通滤波:70Hz/100Hz/150Hz滤波器
常见曲面的参数方程
§4、5 常见曲面得参数方程 本节重点:掌握空间中得三种坐标系:直角坐标系、球坐标系、柱坐标系。 掌握旋转曲面得参数方程得建立。 掌握直纹面得参数方程、 本节难点:旋转曲面得参数方程。直纹面得参数方程。 在第二章中,我们已经引进一般曲面与曲线得参数方程得概念、并给出简单曲面与曲线得参数表示,例如球面与圆柱螺旋线,直线得参数方程。现在再介绍旋转曲面、直纹面得参数方程,同时给出空间中另外两种坐标系:球坐标系与柱坐标系。 (一)旋转曲面得参数方程,球坐标与柱坐标 设旋转曲面得轴为轴,母线得参数方程就是 则此旋转曲面可由上每一点生成得纬圆所构成得、由于这纬圆上动点与它在坐标面上得投影具有相同得坐标,所以上任一点生成得纬圆得参数方程就是 其中就是纬圆半径,即到轴得距离,而参数就是轴到得转角、设对应得参数就是,则 再让在其取值范围内变动,即得这旋转曲面得参数方程 (4、5.1) 特别地,当母线为坐标面上得径线 时,(4。5、1)成为 (4.5.2) 例1、如图,以原点为中心,为半径得球面可瞧作就是由坐标面上得半圆, ()绕轴旋转所生成得,由(4.5。2)得其参数方程为 (4、5。3) 它与§2。1中得球面参数方程得形式就是相同得。 (4、5、3)中得参数分别叫做经度与纬度,序对叫做地理坐标、显然,除两极外,球面上得点与序对一一对应。这种利用曲面参数方程中得两个参数来表示曲面上得点得坐标叫做曲纹坐标,它对于曲面理论得进一步研究有着重要得作用。 利用球面得这种曲纹坐标还可以引入空间得另一种坐标系。设为空间任意一点,它到原点得距离为,过作以原点为中心,以为半径得球面,则在这球面上具有地理坐标,可令点P对应有序数组;反之,由非负实数可确定所在得球面,再由在这球面上确定点。空间中点得这种坐标叫做球坐标。显然,轴上点得球坐标可取任意值、 把(4.5。3)中得常数换为变数,就成为球坐标与直角坐标得变换式,即 (4、5。4) 反之,有 (4。5.5) 当时,=0,于就是,对坐标面上得点,只需序对即可确定、这里不就是别得,正就是大家熟知得极坐标。这时原点就是极点,轴就是极轴,因此,球坐标可以瞧作就是平面极坐标在空间中得一种推广。 例2、如图4-17,以轴为对称轴,半径为得圆柱面可瞧作就是由坐标面上得直线: ,
第三章 岸桥的基本参数和主要技术数据
第三章岸桥的基本参数和主要技术数据 岸桥的基本参数描述了岸桥的特征、能力和主要技术性能。基本参数主要包括几何尺寸、起重量、速度、控制与供电、防摇要求和生产率等。 第一节几何尺寸参数 几何尺寸参数是表示岸桥作业范围、外形尺寸大小及限制空间的技术数据,主要有以下8个参数; 外伸R 0轨上/轨下起升高度H u /H d 轨距S联系横梁下净空高度 C hp 后伸距R b门框内净宽 C wp 基距 B 岸桥(大车缓冲器端部之间)总宽W b 此外,还有门框下横梁上表面离地高度h s、门框外档宽度W p、前大梁宽度B b或小车总宽B t;、梯形架顶点高度H0、仰起后岸桥总高H s、前大梁前端点离海侧轨道中心线的水平面距离L 0、后大梁尾端离陆侧轨道中心线的水平面距离L b、前大梁下表面离地高H b、缓冲器安装高S b,岸桥与船干涉限制尺寸S f、S h、α,以及岸桥与码头固定设施或流动设备干涉的限制尺寸C1、C2、C3、C4、C5等等。尺寸参数示意图如图3-1-1所示。 一、外伸距R 0 小车带载向着海侧运行到前终点位置时,吊具中心线离码头海侧轨道中心线之间的水平距离,称为外伸距,用R 0表示。图3-1—2为岸桥外伸距示意图。 外伸距是表示岸桥可以装卸船舶大小的主要参数。它受到船宽(甲板上集装箱排数)和层高,船的横倾角α、船舶吃水、码头前沿(岸壁至海侧轨中心线之间)的距离F.码头防碰靠垫(也称护舷)的厚度f 以及预留小车制动的安全距离等因素的影响。 岸桥的外伸距除应考虑船宽外,还应考虑船倾斜的影响,因而它与装载的集装箱层高
有关。 超巴拿马型岸桥的外伸距是以能装卸超巴拿马集装箱船(宽度32.3 m以上)为标志的。世界各国码头前沿距离F和碰靠垫厚度f各不相同,F min=2m,F max=7.5 m,f min=0.6 m,f =2.0 m。超巴拿马型船宽从14排起至22排不等,因此,超巴拿马型岸桥的外伸距也各max 不相同。 通常,码头前沿F=3 m,碰靠垫f=1.5 m,14排箱的船宽为35m,甲板上5层箱横倾3°的增量约1.5 m,R 0=3+1.5+(35-1.25)+1.5,R 0≈40 m。目前最大外伸距达67.5 m。 二、后伸距R b 小车带载向着陆侧运行到后终点位置时,吊具中心线离码头陆侧轨道中心线之间的水平距离,称为后伸距,用R b表示(图3-l-1)。 后伸距是按搬运和存放集装箱船的舱盖板,以及特殊情况下作为接卸车辆的一条通道或临时堆放集装箱的要求来确定的。 舱盖板沿船宽方向可以分放置1块、2块和3块舱盖板3种,如图(3-1-3a 、b)所示。 舱盖板沿船长方向的尺寸一般不超过14 m,以便从起重机门框立柱间(净宽一般为16~18 m)通过;沿船宽方向的尺寸为15~17.5 m,可堆放6~7列集装箱。由于是在其中点起吊,考虑到陆侧门框陆侧边应留有上机的斜梯和行走净空宽度2.5m左右(见图3-1—1)
第二章第二节曲面的参数方程
第二章 曲面论 第二节 曲面的参数方程 一、 曲面的参数方程 设曲面∑是由显式 D y x y x f z ∈=),(),,( 所表示。 设),,(z y x 是曲面∑上的点,记向量),,(z y x r = ,则它们可构成一一对应。 于是曲面∑上的点可以用向量值函数 D y x y x f y x r ∈=),()),,(,,( 来表示, 也可以写为参数形式 ?????===),(, ,y x f z y y x x D y x ∈),(。
一般地,设3),(R v u r r ∈= ,其中参 数?∈),(v u ,这里?是2R 中的一 个区域。 我们称由3),(R v u r r ∈= , ?∈),(v u ,所构成的3R 中点集∑为一张参数曲面,(即曲面∑,可以表示为参数方程表示的点集。) 记为?∈=∑),(),,(:v u v u r r ,(1) 把(1)用分量表示出来,就是 ?? ???===),(),(),,(v u z z v u y y v u x x ,?∈),(v u (2) 通常,我们称(1)是曲面∑的向量方程,而(2)是曲面∑的参数方程。 显然方程(1)和(2)之间的转换是直截了当的,所以我们可以认为(1)与(2)是一回事。
二、 几个用参数方程表示的常见 曲面 例1 平面的参数方程, 设30000),,(R z y x p ∈= 是一个固定的点, ),,(321a a a a = 与),,(321b b b b = 是自0p 出发的两个不平行的向量。这时,由a 与b 张成的平面可以用向量方程, 20),(,R v u b v a u p r ∈++= 来表示; 写成分量表示为 v b u a x x 110++=, v b u a y y 220++=, v b u a z z 330++=,
招标文件中第三章技术参数详细要求,二,技术需求明细现更改为
招标文件中第三章技术参数详细要求,二、技术需求明细现更改为: 二、技术需求明细 高压清洗车技术参数要求 要求产品设计合理,性能优良,操作灵活,维修方便,可用于水务、市政、环卫、化工、机械、冶金、电力、机场等部门作为高效率冲洗设备。参数要求如下表所列: 其它相关要求: 1、可以进行连续清洗、疏通、以减少加水次数节约油料和工时。 2、水泵压力大,性能稳定,清洗、疏通效果好。 3、后转盘可90度旋转,在非机动车道疏通时,不需调整停车位置即可作业。 4、采用变速箱夹心取力技术,功率损耗接近为零,噪音小;取力器开启为驾驶室气动操作。 5、高压水泵:SLR212/200。 6、高压泵体保护:低水位报警器及泵体保护装置,报警后油门自动减少至最底速,高压三通阀自动转换使水路系统内部循环从而起到对高压泵的保护。 7、操作控制系统:手自动一体控制操作系统,可无线遥控;具有急停装置使整车配置更安全。 8、低水压冲水装置:清洗车体及周边地面保持整车清洁。压力50bar,手持式冲洗枪,卷筒可自动收方,高压胶管长15米。 ★9、整车要求配置便携式管道影像仪的智能管理系统软件及利用GPS定位软件,实时反馈现场施工作业数据。 10、罐体为不小于4mm的优质钢板材制作而成。本车的油泵、油马达、多路阀均选用
国内名牌产品。高压三通分配阀内芯(关键零部件)采用不锈钢制作,其密封效果及承受压力是普通铸钢球阀的三倍以上。耐压胶管选用双层产品,耐压强度超出输入压力的一倍以上,增强操作过程的安全性。 11、罐体及金属附件进行了涂前磷化处理,喷涂高分子防腐底漆和金属面漆。 招标文件中评标文件4.评标表格“表二、商务、技术评估表”现更改为:
旋转曲面的参数方程(利用正交变换作旋转)
旋转曲面的参数方程 ---------利用正交变换作旋转 众所周知,yOz 坐标面上的曲线(,)0F y z =绕z 轴旋转而成的旋转曲面的方程为 ()0F z = (1) (见同济大学《高等数学》(5版上册),313页)。 如果以上曲线的方程能写成显函数()y f z =(a z b ≤≤),则该旋转曲面的方程为 ()f z =或 222[()]x y f z += (2) 这个方程的几何意义是:对曲线上的每一点(0,,)P y z ,这个方程给出圆心在(0,0,)z ,半径为()f z 的一个垂直于z 轴的圆。当z 取遍[,]a b 中的每一个值时,这些圆就构成一个旋转曲面。 如果曲线的方程是显函数()y f z =(a z b ≤≤),我们也可以用参数方程来表示这个旋转面: ()c o s ()s i n x f z y f z z z θθ?=?=??=? (02θπ≤≤,a z b ≤≤) (3) 这个方程的几何意义是:对每一个[,]z a b ∈,参数方程给出一个半径为()f z 的垂直于z 轴的圆。当z 取遍[,]a b 中的每一个值时,这些圆就构成一个旋转曲面。 如果曲线的方程能写成参数方程() ()y f t z g t =??=?(a t b ≤≤),则旋转曲面的参数方程为: ()cos ()sin ()x f t y f t z g t θ θ?=? =??=? (02θπ≤≤,a t b ≤≤) (4) 这个方程的几何意义是:对每一个[,]t a b ∈,参数方程给出一个半径为()f t 的垂直于z 轴的圆。当t 取遍[,]a b 中的每一个值时,这些圆就构成一个旋转曲面。 推而广之,如果该曲线是空间曲线,其参数方程为() ()()x h t y f t z g t =??=??=? (a t b ≤≤),则此曲线绕z 轴旋转而成的旋转曲面的参数方程为:
常见曲面的参数方程
.常见曲面的参数方程
————————————————————————————————作者:————————————————————————————————日期:
§4.5 常见曲面的参数方程 本节重点:掌握空间中的三种坐标系:直角坐标系、球坐标系、柱坐标系。 掌握旋转曲面的参数方程的建立。 掌握直纹面的参数方程。 本节难点:旋转曲面的参数方程。直纹面的参数方程。 在第二章中,我们已经引进一般曲面与曲线的参数方程的概念、并给出简单曲面与曲线的参数表示,例如球面与圆柱螺旋线,直线的参数方程。现在再介绍旋转曲面、直纹面的参数方程,同时给出空间中另外两种坐标系:球坐标系与柱坐标系。 (一)旋转曲面的参数方程,球坐标与柱坐标 设旋转曲面的轴为Z 轴,母线Γ的参数方程是 )()()()(b t a t h Z t g Y t f X ≤≤=== 则此旋转曲面可由Γ上每一点生成的纬圆所构成的。由于这纬圆上动点),,(Z Y X P 与它在坐标面XOY 上的投影' P 具有相同的Y X ,坐标,所以Γ上任一点),,(1111Z Y X P 生成的纬圆的参数方程是 ??? ????=+=+=12 12121 21sin cos Z Z Y X Y Y X X θθ )20(πθ<≤ 其中 2121Y X +是纬圆半径,即1P 到Z 轴的距离,而参数θ是X 轴到1OP 的转角。设1P 对 应的参数是1t ,则 )())(())((112 1212121t h Z t g t f Y X =+=+ 再让1t 在其取值范围内变动,即得这旋转曲面的参数方程 ??? ????=+=+=)(sin ))(())((cos ))(())((2 222t h Z t g t f Y t g t f X θθ ??? ? ??<≤≤≤πθ20b t a (4.5.1) 特别地,当母线P 为坐标面XOZ 上的径线 )(0) (t h Z Y t f X === 时,(4.5.1)成为
4.5常见曲面的参数方程
4.5常见曲面的参数方程
§4.5 常见曲面的参数方程 本节重点:掌握空间中的三种坐标系:直角坐标系、球坐标系、柱坐标系。 掌握旋转曲面的参数方程的建立。 掌握直纹面的参数方程。 本节难点:旋转曲面的参数方程。直纹面的参数方程。 在第二章中,我们已经引进一般曲面与曲线的参数方程的概念、并给出简单曲面与曲线的参数表示,例如球面与圆柱螺旋线,直线的参数方程。现在再介绍旋转曲面、直纹面的参数方程,同时给出空间中另外两种坐标系:球坐标系与柱坐标系。 (一)旋转曲面的参数方程,球坐标与柱坐标 设旋转曲面的轴为Z 轴,母线Γ的参数方程是 )()()()(b t a t h Z t g Y t f X ≤≤=== 则此旋转曲面可由Γ上每一点生成的纬圆所构成的。由于这纬圆上动点),,(Z Y X P 与它在坐标面XOY 上的投影' P 具有相同的Y X ,坐标,所以Γ上任一点),,(1111Z Y X P 生成的纬圆的参数方程是 ???????=+=+=121212121sin cos Z Z Y X Y Y X X θ θ )20(πθ<≤
),(?θ叫做地理坐标。显然,除两极外,球面上的点),,(Z Y X P 与序对),(?θ一一对应。这种利用曲面参数方程中的两个参数来表示曲面上的点的坐标叫做曲纹坐标,它对于曲面理论的进一步研究有着重要的作用。 利用球面的这种曲纹坐标还可以引入空间的另一种坐标系。设P 为空间任意一点,它到原点的距离为r ,过P 作以原点为中心,以r 为半径的球面,则P 在这球面上具有地理坐标?θ,,可令点P 对应有序数组),,(?θr ;反之,由非负实数r 可确定P 所在的球面,再由),(?θ在这球面上确定P 点。空间中点的这种坐标叫做球坐标。显然,Z 轴上点的球坐标θ可取任意值。 把(4.5.3)中的常数a 换为变数r ,就成为球坐标与直角坐标的变换式,即 ?????===?θ ?θ?sin sin cos cos cos r Z r Y r X ?????? ??<<-<≤≥22200πππθt r (4.5.4) 反之,有 ?????????++=+=+=++=2222222222arcsin sin cos Z Y X Z Y X X Y X X Z Y X r ?θθ (4.5.5)
45常见曲面的参数方程
§4.5 常见曲面的参数方程 本节重点:掌握空间中的三种坐标系:直角坐标系、球坐标系、柱坐标系。 掌握旋转曲面的参数方程的建立。 掌握直纹面的参数方程。 本节难点:旋转曲面的参数方程。直纹面的参数方程。 在第二章中,我们已经引进一般曲面与曲线的参数方程的概念、并给出简单曲面与曲线的参数表示,例如球面与圆柱螺旋线,直线的参数方程。现在再介绍旋转曲面、直纹面的参数方程,同时给出空间中另外两种坐标系:球坐标系与柱坐标系。 (一)旋转曲面的参数方程,球坐标与柱坐标 设旋转曲面的轴为Z 轴,母线Γ的参数方程是 )()()()(b t a t h Z t g Y t f X ≤≤=== 则此旋转曲面可由Γ上每一点生成的纬圆所构成的。由于这纬圆上动点),,(Z Y X P 与它在坐标面XOY 上的投影' P 具有相同的Y X ,坐标,所以Γ上任一点),,(1111Z Y X P 生成的纬圆的参数方程是 ??? ????=+=+=121212121sin cos Z Z Y X Y Y X X θθ )20(πθ<≤ 其中2121Y X +是纬圆半径,即1P 到Z 轴的距离,而参数θ是X 轴到1OP 的转角。设1P 对应的参数是1t ,则 )())(())((112 1212121t h Z t g t f Y X =+=+ 再让1t 在其取值范围内变动,即得这旋转曲面的参数方程 ??? ????=+=+=)(sin ))(())((cos ))(())((2222t h Z t g t f Y t g t f X θθ ??? ? ??<≤≤≤πθ20b t a (4.5.1) 特别地,当母线P 为坐标面XOZ 上的径线 )(0) (t h Z Y t f X === 时,(4.5.1)成为
第二章第一节曲面的概念显式方程和隐式方程表示
第二章曲面的表示与曲面论 第一节曲面的显式方程和 隐式方程 一、由显式方程表示的曲面 设2R D?是有界闭区域,函数 :连续。我们称函数f的图 f→ D R 像 z y R z f x f ∈ = G∈= x : ,( } y ),, ),(), y x (3D {( ) 为一张曲面,它展布在D上,称这 个曲面是由显式方程 , =) z∈ (), , ( y f D y x x 所确定的。 ∑表示一个曲面。 通常用 二、几种常见的曲面 例1 在空间直角坐标系中,中心 a、在xy平面 在坐标原点、半径为 上方的那个半球面(称为上半球面),它的显式方程为
222y x a z --=,D y x ∈),(, 其中 }:),{(222a y x y x D ≤+=,即D 是xy 平面上以原点为中心、半径为a 的圆盘。 显然,下半球面的方程为 222y x a z ---=,D y x ∈),(; 同样可给出左半球面、右半球面的方程式。 例2 点集 }1,0,,:),,{(=++≥z y x z y x z y x 是3R 中的一块等边三角形。这块曲面有显式表达 y x z --=1,D y x ∈),(, 其中}1,0,:),{(≤+≥=y x y x y x D 。 例 3 由方程axy z =,2),(R y x ∈, (常数0>a ),所确定的曲面称为双曲抛物面。 由于这曲面在在xy 平面的上的,第一、第三象限中,在xy 平面的上
方,而在第二、第四象限中是在xy 平面的下方,因此在原点)0,0,0(的近旁,曲面呈鞍的形状,俗称马鞍面。 例4 旋转曲面的方程 1设想在xz 平面上有一条显式曲线)0(),(b x a x f z ≤≤≤=。 如果固定z 轴不动,让xz 平面绕着z 轴旋转 360,那么这一条曲线就扫出一张曲面,称之为旋转曲面∑。 设∑∈),,(z y x ,它在过点),0,0(z 平行于xy 平面的平面上,以),0,0(z 为中心,半径为r 的圆周上()(r f z =), 222r y x =+, 于是得这个旋转曲面∑的方程为):(),(222222b y x a D y x f z ≤+≤+=。