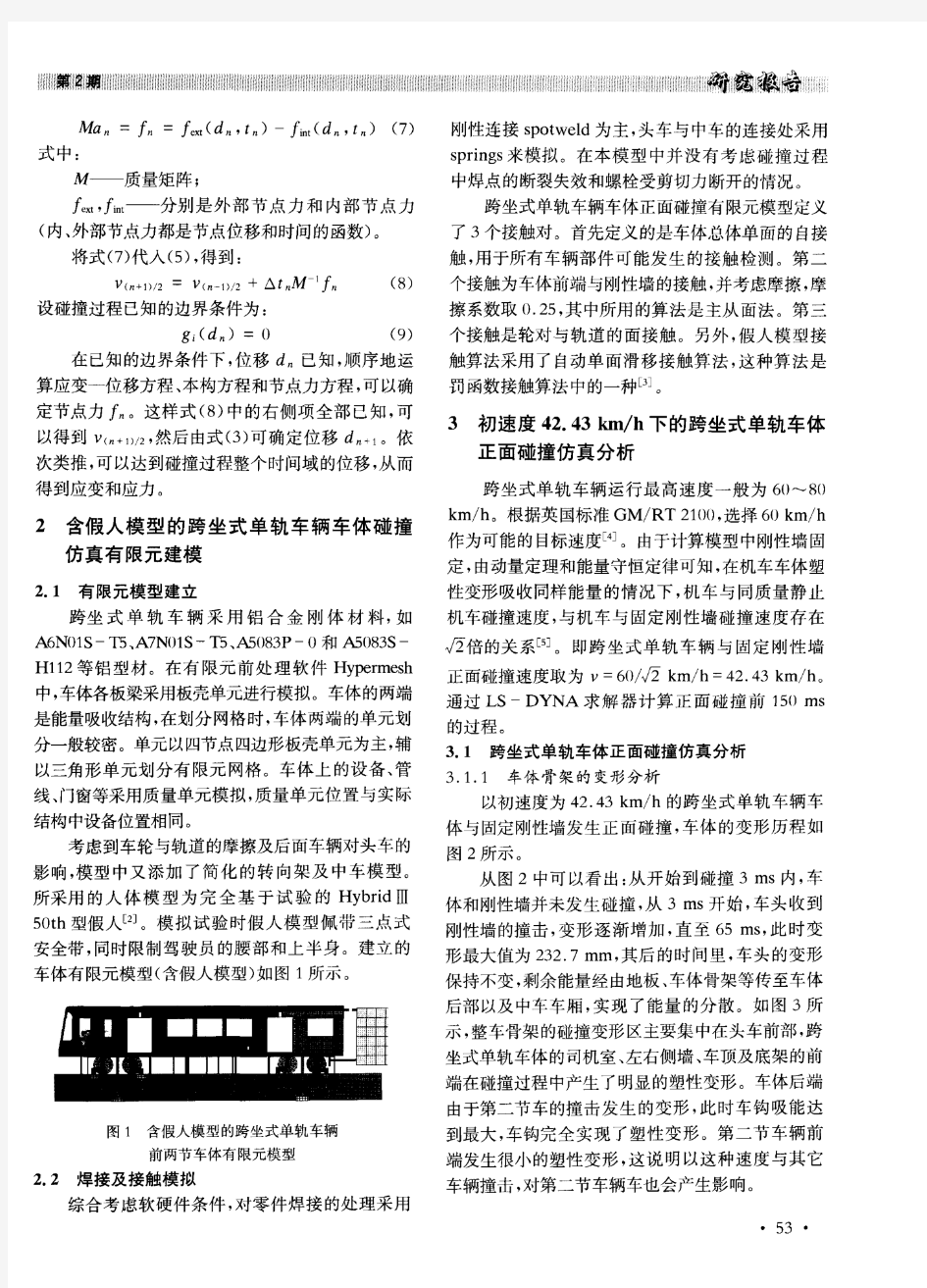
含假人模型的跨坐式单轨车辆碰撞安全仿真分析
基于泊松过程的校园车辆调度模型研究
基于泊松过程的校园车辆调度模型研究 摘要:基于动态交通分配原理,根据校园学生出行特点,利用泊松过程研究校园的车辆调度方案,建立了校园车辆调度模型。通过非齐次泊松过程离散化为分段的齐次泊松过程,描述了学生出行人数随时间推移而动态变化的过程,以此为基础求解出具体的车辆调度方案,并对该模型进行了模拟。模拟结果表明由本文模型得到的车辆调度方案效果良好。 关键词:动态交通分配;校园车辆调度;泊松过程 引言 交通需求具有随时间变化的特点,这使得交通网络上的交通流具有动态特性。因此动态的交通分配模型能够更广泛、更确切地描述交通网络上的各种交通现象。车辆调度被广泛运用于交通运输行业,车辆调度的最终目的是降低成本、提高效率、提高服务水平,实现资源的合理优化配置。 目前,对车辆调度模型的研究主要集中在物流配送车辆动态、城市公交系统和轨道交通系统车辆调度等领域。文献[1-5]分别针对不同的情形,考虑了动态交通的车辆调度问题,其中最关键问题是如何刻画乘客的排队模型。一般为讨论方便假定乘客的到来服从齐次泊松过程,但此假定不足以描述现实情况,而非齐次泊松过程又过于复杂,无法求出其强度函数。 校园作为一个小型的综合功能区,其对交通的需求有着自身的特点,如学生出行时间比较集中,出行高峰主要集中在早中晚。周末出行需求异于平时。以往文献对校园的车辆调度方案的研究比较少。 本文通过将非齐次泊松过程简化为分段齐次的泊松过程,有效地解决了此问题。基于动态交通分配的原理,结合校园出行的特殊性,利用泊松过程建立了校园车辆调度模型,并对该模型进行了模拟,得到了很好的结论。 1基本假定 结合学生出行分布的特点,本文基于如下假设提出了一个双目标规划问题,以求对学校校车进行动态分配,使学生候车时间最少,校车空座率最低。 (1)学校设置的站点主要集中在学生出行密集的地方,如宿舍、图书馆、教学楼、校门口; (2)假设校车在运行过程中都是一站式到达,即在起点与终点间没有其他站点; (3)校车都是同一车型,即载客量相同; (4)各时段内学生乘车人数服从泊松分布,出行量因泊松分布的参数λ而异; (5)假设车辆的满载率不超过车容量的α倍,其中α∈[1,1.5)。 进一步给出以下记号 n:学校的站点总数,若只在宿舍、图书馆、教学楼、校门口设站点,则n=4. T:时间段总数,若校车运行时间从早上6点到晚上6点,以10min为一个基本单位,则1天12h,共对应72个基本时间单位,则T=72。 T t:第t个时间段的时间长度,如以10min为一个基本时间单位,则T t=10min,t=1,....,T。
汽车ABS系统的建模与仿真设计
基于Matlab/Simulink的汽车建模与仿真 摘要 本文所研究的是基于Matlab/Simulink的汽车防抱死刹车系统(ABS)的仿真方法,本方法是利用了Simulink所提供的模块建立了整车的动力学模型,轮胎模型,制动系统的模型和滑移率的计算模型,采用的控制方法是PID控制器,对建立的ABS的数学模型进行了仿真研究,得到了仿真的曲线,将仿真曲线与与没有安装ABS系统的制动效果进行对比。根据建立的数学模型分析,得到ABS系统可靠,能达到预期的效果。 关键词 ABS 仿真建模防抱死系统PID
Modeling and Simulation of ABS System of Automobiles Based on Matlab/Simulink Abstract A method for building a Simulator of ABS base on Matlab/Simulink is presented in this paper.The single wheel vehicle model was adopted as a research object in the paper. Mathematical models for an entire car, a bilinear tire model, a hydraulic brake model and a slip ratio calculation model were established in the Matlab/Simulink environment. The PID controller was designed. The established ABS mathematical model was simulated and researched and the simulation curves were obtained. The simulation results were compared with the results without ABS. The results show that established models were reliable and could achieve desirable brake control effects. Key words ABS; control; modeling; simulation;Anti-lock Braking System; PID
汽车碰撞模拟分析流程
汽车碰撞模拟分析流程-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
ANSYS 汽车碰撞分析流程Flow Chart of Auto Impact Analysis Prepared By 史志远 Date: Nov.1, 2004
汽车碰撞模拟分析流程 一、碰撞安全性试验介绍: 在汽车模拟分析的过程中,提高汽车碰撞安全性的目的是在汽车发生碰撞时确保乘员生存空间、缓和冲击、防止发生火灾等等。但是从碰撞事故分析中可知,汽车碰撞事故的形态也千差万别,所以对汽车碰撞安全性能的评价也必须针对不同的碰撞形态来进行。按事故统计结果,汽车碰撞事故主要可分为正面碰撞、侧面碰撞、追尾碰撞和翻车等几种类型。但随着公路条件的改善,正面碰撞和侧面碰撞形态成了交通事故中最常见的碰撞形式。 按照碰撞试验的目的区分,现在碰撞试验大体可以分为三类: 1)由政府法规要求的强制性试验:例如FMVSS208、ECE R94法规规定的正面碰撞试 验,FMVSS214、ECE R95法规规定的侧面碰撞试验等等; 2)由汽车制造厂自己制定的碰撞试验方法:例如用于提出改善汽车碰撞安全性的新 措施等等; 3)为消费者提供信息的试验:例如美国、欧洲等国家实施的新车评价程序 (NCAP), 汽车安全法规中规定了达到政府规定的最低安全性能要求,NCAP以 更高的车速进行正面碰撞试验,以展示汽车产品的碰撞安全性能。 由于法规试验是政府强制实施的,所以,汽车碰撞试验法规是人们关注的热点。下表列出了一些美国FMVSS, 欧洲ECE的汽车被动安全性法规的试验项目。 表一 FMVSS 与 ECE 的一些汽车安全性法规
制造系统建模与仿真知识点2
知识点2 1. 结合具体制造系统或服务系统,分析离散事件动态系统的基本特征。 2. 什么叫“状态空间爆炸”?产生状态空间爆炸的原因是什么?它给系统性能分析带来哪些 挑战? 3. 常用的离散事件系统建模方法有哪些,它们是如何分类的? 4. 什么是马尔可夫特性?它在离散事件系统建模与分析中有什么作用? 5. 根据功能不同,仿真模型(程序)可以分为哪三个层次?分析三个层次之间的关系。 6. 分析事件调度法、活动循环法、进程交互法和消息驱动法等仿真调度方法的特点,在分 析每种调度方法基本原理的基础上,阐述几种仿真调度方法之间的区别与联系,并绘制每种仿真调度方法的流程图。 7. 结合具体的离散事件系统,如银行、理发店、餐厅、超市、医院、作业车间等,采用事 件调度法、活动循环法或进程交互法分析建立此类系统的仿真模型,试分析仿真模型中的建模元素以及仿真调度流程。 8. 从系统描述、建模要点、仿真时钟推进机制等层面,比较事件调度法、活动循环法和进 程交互法的异同之处。 9. 什么叫仿真时钟,它在系统仿真中有什么作用?什么叫仿真时钟推进机制?常用的仿真 时钟推进机制有哪些?它们的主要特点是什么,分别适合于怎样的系统? 10.结合具体的离散事件系统,分析若采用固定步长时间推进机制、下次事件时间推进机制 或混合时间推进机制时,分别具有哪些优点和缺点,以图形或文字等形式分析时钟推进流程。 11.什么叫仿真效率?什么叫仿真精度?分析影响仿真效率和仿真精度的因素? 12.从仿真效率和仿真精度的角度,分析和比较三种仿真时钟推进机制的特点,并分析三种 仿真时钟推进机制分别适合于什么样的系统? 13. 什么是蒲丰投针试验?绘制蒲丰投针试验原理图,通过推导蒲丰投针试验中针与任一直 线相交的概率,分析采用随机投针试验方法来确定圆周率π的原理。 14. 按照蒲丰投针试验的条件和要求,完成投针试验,在统计投针次数、针与直线的相交次 数的基础上,求解π的估计值,并以报表或图形等形式表达试验结果。具体要求如下: ①自行确定针的长度、直线之间的距离。 ②投针10次、20次、30次、40次、50次、…、100次、…、200次、…,分别计算针 与直线相交的概率、π的估计值。 ③以一随机变量描述上述试验结果,并通过编程或采用商品化软件,以图形、报表等形 式表示投针试验结果,分析其中的规律,并给出结论。 ④写出试验报告。 ⑤在熟悉投针试验原理的基础上,编制投针试验仿真程序,动态运行投针试验的过程。15.什么是蒙特卡洛仿真?它有什么特点,蒙特卡洛仿真应用的基本步骤是什么? 16.采用C或C++等语言,分别编写产生均匀分布、正态分布、指数分布以及威布尔分布的伪随机数序列,通过改变每种分布中参数的数值,分析不同参数数值对随机数值的影响;通过对所产生的伪随机数分布区间的统计、分析和绘图,检验伪随机数的特性及其数值特征。 17. 对于制造系统而言,库存有哪些作用和功能? 18. 在制造企业中,库存大致可以分成四种类型。简要论述四种库存的名称和功能。 19. 什么是安全库存、订货提前期?确定安全库存和订货提前期时分别需要考虑哪些因素? 20. 什么叫“订货点法”?要确定订货点,需要哪些条件?订货点法适合于怎样的库存系统?
数学建模汽车租赁调度问题
汽车租赁调度问题 摘要 国内汽车租赁市场兴起于1900年北京亚运会,随后在北京、上海、广州及深圳等国际化程度较高的城市率先发展直至2000年左右,汽车租赁市场开始在其他城市发展。 为了对某市的一家租赁公司获利情况进行分析并确定汽车调度方案,本文我们以非线性规划为基础,通过matlab,excel等软件对数据进行处理,最小二乘法对缺失数据进行预测,最终使用lingo软件进行编程求解得到最终的优化方案。 在问题一中,我们基于对题目中尽量满足需求的理解,考虑到总的车辆数和总的需求量之间的关系,用最小偏差法和分段考虑法进行了计算,分别建立多目标规划模型和非线性规划模型,通过对转运后各代理点最终的车辆数进行分析,比较两种结果得到更优的转运方案。 在问题二中,我们一方面要对其短缺损失进行理解,另一方面要考虑,是否应该考虑在尽量满足需求的条件下求其最低的转运费用和短缺损失,此问题中我们同样分两种情况对其进行考虑,通过比较两者最低费用并且结合实际情况,得到更合理的转运方案。 在问题三中,首先我们分析数据,剔除了其中一场的部分,并用最小二乘法对缺失数据进行预测,得到完整的单位租赁费用与短缺损失费用,然后综合考虑各种因素后,我们将公司获利最大作为最终目标函数通过非线性规划的模型求得最佳方案。 在问题四中,我们没有直接对是否购买新车作出判断,而是直接以其八年获利最大为目标进行非线性规划,购买的车辆数成为其目标函数中的一个未知数,用lingo可直接求得在获利最大时的购车数量,将其与不购车时的利润进行比较可得到最佳的购买方案。 关键词:非线性规划全局最优短缺损失最小二乘法
一.问题重述 国内汽车租赁市场兴起于1990年北京亚运会,随后在北京、上海、广州及深圳等国际化程度较高的城市率先发展,直至2000年左右,汽车租赁市场开始在其他城市发展。 某城市有一家汽车租赁公司,此公司年初在全市范围内有379辆可供租赁的汽车,分布于20个代理点中。每个代理点的位置都以地理坐标X和Y的形式给出,单位为千米。假定两个代理点之间的距离约为他们之间欧氏距离(即直线距离)的1.2倍。要求根据附件所给数据计算如下问题: 1.给出未来四周内每天的汽车调度方案,在尽量满足需求的前提下,使总的转运费用最低; 2.考虑到由于汽车数量不足而带来的经济损失,给出使未来四周总的转运费用及短缺损失最低的汽车调度方案; 3.综合考虑公司获利、转运费用以及短缺损失等因素,确定未来四周的汽车调度方案; 4.为了使年度总获利最大,从长期考虑是否需要购买新车?如果购买的话,确定购买计划(考虑到购买数量与价格优惠幅度之间的关系,在此假设如果购买新车,只购买一款车型)。 二.问题分析 汽车租赁调度问题是一个典型的数学规划问题,需要综合考虑转运费用,短缺损失,公司获利等多方面因素,在掌握了各代理点实际需求下,根据一定要求,寻找到使目标函数满意的优化解。 问题一中,要求在尽量满足需求的前提下,使未来四周的总转运费用最低。对数据进行处理后,对尽量满足需求这一约束条件,认为其在需求量大于供应量时应保证每辆车都能够被利用,在需求量小于供应量时应保证每个代理点的需求都能被满足。然后据此约束建立多目标规划模型求全局最优解,使得未来四周总的转运费用最小。 针对问题二,我们需要考虑在汽车数量不足的情况下所带来的短缺损失,所谓短缺损失是指,在某代理点某天经过转运后最终的车辆数比需求量少时,少的车辆数与单位短缺损失的乘积。在此基础上建立两种模型,第一种是尽量满足需求条件下的模型,第二种是不考虑尽量满足需求这一条件下的模型。然后分别建立非线性规划模型求全局最优,使得未来四周的转运费与短缺损失之和最小。 针对问题三,综合考虑公司获利、转运费用以及短缺损失等因素,以公司获利最多作为目标函数,考虑到前期尽量满足需求对公司后续的租赁需求影响,在此仅
汽车碰撞过程中加速度的试分析
汽车碰撞过程中加速度的试分析 江门市新会区冈州职业技术学校 孙林华 一、碰撞过程中的加速度曲线 汽车正面碰撞过程中,动能转化为变形能,被车身部件所吸收。车身加速度会使车内乘员受到冲击响应,对乘员造成伤害。 实际的加速度曲线是由碰撞过程中的结构变形成产生的,加速度曲线的峰值大小和持续时间是影响乘员伤害的重要因素。峰值越高,冲击越强,碰撞安全性就越差。 车身在碰撞过程中产生的加速度,分为两个主要阶段:在碰撞初期,车身加速度有一个很大的峰值出现;随后车身及吸能部件依次发生压溃变形,进入相对稳定的吸能阶段。加速度的峰值通常高出稳态阶段的2~3倍。 二、碰撞过程中的加速度试计算 碰撞过程:汽车以60公里/小时速度正面碰撞1米后停止。试分析如下: 1、假设汽车碰撞过程是匀减速直线运动, 则有:a v v t v at s t t 2212)0(2)()0(2) (-=+= )(2)0(2)(2t t s v v a -= 其中:秒米小时公里/67.16/60)0(==v 0)(=t v 米1)(=t s 222)(2 ) 0(2)(/9.138/1 267.1602秒米秒米-=?-=-=t t s v v a 2、重力加速度2/8.9秒米=g ,则: 匀减速碰撞过程中 g a 2.14/9.1382 -≈-=秒米 3、汽车在碰撞过程中的加速度在稳态阶段时,按平均加速度来估算,即 g a a 2.14-≈≈稳 碰撞过程中加速度的峰值按稳态阶段的2倍估算,则有: g g a a 302.1422-≈?-==稳峰值 三、结论 1、汽车以60公里/小时速度正面碰撞1米后停止过程中,加速度峰值约为-30g 。 2、车载设备的耐冲击试验中,冲击力可按g a 30=进行测试。
碰撞试验假人简介
碰撞试验假人简介 策划:《世界汽车》编辑部撰文:占强、杨絮 C-NCAP实施后,在国内外产生了深远影响,越来越多的消费者在买车时开始考虑所购买车型拥有几颗星。同时,消费者对汽车碰撞试验中的神秘假人又显得异常好奇,本刊作为C-NCAP的惟一官方平面媒体特策划了假人系列报道。 碰撞试验假人发展史 自汽车诞生之日起,交通事故也就随之而生,夺去了无数人的生命。研究交通事故形式、改进汽车设计从而提高安全性成了一个重要而迫切的课题。但是,我们不可能把真人用于实验之中。于是,我们就迫切需要一种能够模拟人体特征、并可重复使用的实验仪器。 正是在这样的背景下诞生了碰撞实验假人(Crash Test Dummies)。碰撞实验假人是根据人体工程学原理,用特殊材料制成的实验仪器,它可以代替人体用于汽车碰撞实验,从而模拟出真人受到的伤害情况,并且可以重复使用。 实验假人并不是从汽车领域诞生的,1949年,美国的Sierra公司研制出了世界上第一个假人名为Sierra Sam,它是一个95百分位成年男性假人,美国空军利用它来做火箭座椅弹出试验,它主要用于测试驾驶员大腿和肩部的伤害情况。这个假人的耐受性和适用性都比较好,但是可重复使用性差。而且它只是在外形、重量和重要关节的运动上和人有些相似,其他方面还有很大差异。该假人的生物学指标依据“USAF人体测量数据库”的数据而制定。它所能代表的测量个体还非常有限。 1966年,美国ARL公司研制开发了VIP系列假人,主要用于测试飞机的驾驶员逃离系统,同时它也更适用于汽车领域的要求。此后,通用和福特等汽车公司纷纷支持汽车碰撞假人的研制。 在碰撞试验假人的历史中最值得的一提的是Hybrid系列假人。1971年ARL公司和Sierra合作开发出Hybrid I型标准假人:1971年,在美国汽车巨头的支持下,第一安全系统技术公司(FTSS:First Technology Safety Systems)制造出Hybrid II型假人,美国政府决定将其作为汽车碰撞试验标准假人使用。1997年,第一安全系统技术公司开发成功Hybrid III系列假人,该系列假人是目前世界上应用最为广泛的假人家族。 假人是如何制造而成的 假人是为了代替真人参加试验的,因此我们就要求假人在最大程度上能和真人相似。特别是在体态特征、伤害指标方面,它必须能准确的反映出真人的真实情况。因此,为了制造假人,就必须要有大量翔实而准确的人体数据。目前这些数据主要来自尸体解
汽车碰撞模拟分析流程
ANSYS 汽车碰撞分析流程Flow Chart of Auto Impact Analysis Prepared By 史志远 Date: Nov.1, 2004
汽车碰撞模拟分析流程 一、碰撞安全性试验介绍: 在汽车模拟分析的过程中,提高汽车碰撞安全性的目的是在汽车发生碰撞时确保乘员生存空间、缓和冲击、防止发生火灾等等。但是从碰撞事故分析中可知,汽车碰撞事故的形态也千差万别,所以对汽车碰撞安全性能的评价也必须针对不同的碰撞形态来进行。按事故统计结果,汽车碰撞事故主要可分为正面碰撞、侧面碰撞、追尾碰撞和翻车等几种类型。但随着公路条件的改善,正面碰撞和侧面碰撞形态成了交通事故中最常见的碰撞形式。 按照碰撞试验的目的区分,现在碰撞试验大体可以分为三类: 1)由政府法规要求的强制性试验:例如FMVSS208、ECE R94法规规定的正面碰撞 试验,FMVSS214、ECE R95法规规定的侧面碰撞试验等等; 2)由汽车制造厂自己制定的碰撞试验方法:例如用于提出改善汽车碰撞安全性的新 措施等等; 3)为消费者提供信息的试验:例如美国、欧洲等国家实施的新车评价程序(NCAP), 汽车安全法规中规定了达到政府规定的最低安全性能要求,NCAP以更高的车速 进行正面碰撞试验,以展示汽车产品的碰撞安全性能。 由于法规试验是政府强制实施的,所以,汽车碰撞试验法规是人们关注的热点。下表列出了一些美国FMVSS, 欧洲ECE的汽车被动安全性法规的试验项目。
二、人体伤害评价指标: 在碰撞试验或碰撞模拟分析的过程中,都使用了标准的碰撞试验假人,通过测量假人的响应计算出伤害的指标,用于定量的评价整车及安全部件的保护效能。 1) Hybrid III假人家族的伤害评价基准值: 下表列出了正面碰撞试验用的Hybrid III假人家族的伤害评价基准值。Hybrid III第50百分位男性假人是目前生物保真性最好的正面碰撞试验假人,另外,为了评价汽车对不同身材乘员的安全保护性能,按比例方法开发了第95百分位男性的大身材假人和第5百分位女性的小身材假人。 2)侧面碰撞假人的伤害评价基准值: 下表所示为目前使用的用于侧面碰撞用的假人SID, EuroSID-1的伤害评价基准值:
碰撞试验假人
说到汽车碰撞法规,我们不能不说说碰撞试验中的假人模型。作为汽车安全性的“第一体验者”,从它问世至今贡献巨大。甚至可以说,没有假人的出现,就不会有众多融合高科技的完备安全配置。假人,在一次次猛烈撞击后,在一次次濒临支离中,它已不仅仅是人类的替身,而成为了汽车发展史上的“代表人物”。 人是一种脆弱的动物,必须避免各种可能的伤害。从中世纪的盾牌一直到现代的宇航服,其发明的初衷都是为了保护人体免受伤害。现代交通工具的设计无一不把安全当作重要因素,飞机的弹射座椅挽救了数百人的生命,汽车座椅微微前倾,用以吸收碰撞时的能量。 所有这些设计及想法,都是以人为中心的,然而却没有可供试验的人体。为解决这些问题,科学家最初用死尸进行试验,黑猩猩以及狗也都曾作为试验品,但是由于他们与人体相差很大,所获得的数据也不能让人满意。 1949年,世界上第一个假人由Sierra公司为美国空军设计制造的。最初的假人只有一些简单的功能,除了可模仿人类运动,以及获得加速度等数据以外,它们无法测量在测试中感受到的撞击力。为解决这些问题,人们做了很多的改进,包括曾经设想制造全向假人,但现在一般倾向于将假人分为“前面碰撞假人”以及“侧面碰撞假人”,并且根据人的年龄、性别、体重等分别设计生产。 假人之解疑 一个假人价值几何? 一个假人造价高达4万美元左右,如果加上传感器配套设备,得需6-7万美元。 假人是用什么材质制成的? 假人模型大部分是由金属与塑料制作的,其胸腔是钢制的,肩胛骨是铝制的,盆骨是塑料的。假人的皮肤摸上去不仅要有弹性,还要跟真人一样有一定的承受力。一个假人由近400个部件、大约60个传感器组成。 在正面碰撞试验中应用最多的Hybrid3假人的头部为铸铝材料,皮肤为可拆卸的乙烯橡胶,颈部有分段橡胶以及中空铝架构组成,可正确模拟头部的弯曲及延伸。胸腔由高强钢材以及聚合体减震材料组成,可真实反映人体胸部的挠曲特性。颈部与胸部的角度可由一个支架进行调节,支架内装有6向传感器,肩胛骨与锁骨内部的传感器可测量安全带的压力。由橡胶制成的腰脊柱可模仿人的坐姿,内部装有3向压力测试单元,骨盆由乙烯泡沫制成,球形连接的关节可以模拟碰撞时所起到的减震作用。大腿骨、胫骨可以预测骨折的发生,并可测量韧带所受的拉力。脚及脚踝可以测量关节的活动范围。
车辆调度问题
车辆调度问题 设某车队有8辆车,存放在不同的地点,队长要派出其中5辆到5个工地去运货。各车从存放处调到装货地点所需费用列于下页表,问应选哪5辆车调到何处去运货,才能使各车从车所在地点调到装货地点所需的总费用最少 MATLAB 程序——Kuhn-munkras 算法 function sumw=kuhngong(A) n=size(A,1); w=A; l=zeros(n,2); for i=1:n for j=1:n if l(i,1) end end FLAG_AGL=zeros(n,n); FLAG_S=zeros(1,n); FLAG_T=zeros(1,n); FLAG_NGLS=zeros(1,n);f=zeros(n,2); for i=1:n for j=1:n if l(i,1)+l(j,2)==w(i,j) FLAG_AGL(i,j)=i; end end end M=zeros(n,2); for i=1:n for j=1:n if (FLAG_AGL(i,j)==i)&(~M(j,2)) &(~M(i,1)) M(i,1)=i; M(j,2)=i; end end end FLAG3=1; while FLAG3 FLAG3=0; u=0; for i=1:n if ~M(i,1) u=i; break; end end end while FLAG4 for i=1:n if FLAG_S(i) for j=1:n if FLAG_AGL(i,j)==i FLAG_NGLS(j)=1; end, end, end, end FLAG_EQU=1; for i=1:n if FLAG_NGLS(i)~=FLAGT(i) FLAG_EQU=0; break; end, end FLAG4=0; al=inf; if FLAG_EQU for i=1:n for j=1:n if (FLAG_S(i))&(~FLAG_T(j)) temp=l(i,1)+l(j,2)-w(i,j); if al>temp al=temp; 车辆悬架模型的仿真与分析 目前,关于汽车模型的研究很多。詹长书等人研究了二自由度懸架模型的频域响应特性。李俊等人模拟了不同车速和路况下二自由度车辆模型的动力学。郑兆明研究了二自由度车轮动载荷的均方值。基于Matlab建立了更加复杂的悬架模型,分析了其在模拟路面作用下的响应,分析了系统阻尼参数和刚度参数变化对车身动态响应的影响。 标签:汽车悬架;模型;模拟 据公安部交通管理局统计,截至2019年3月底,全国机动车保有量达3.3亿辆,其中汽车达2.46亿辆,驾驶人达4.1亿,机动车、驾驶人总量及增量均居世界第一。随着汽车数量的迅速增加,人们开始越来越重视汽车的乘坐舒适性,平顺性是舒适性的重要组成部分。振动是影响平顺性的主要因素,因此车身系统参数的合理设计对提高汽车的舒适性和安全性具有重要意义。 1车辆悬架模型 传统的悬架系统一般由弹性元件和参数固定的阻尼元件组成。本文选择汽车后轮的任意悬架系统建立四分之一模型。该模型的简图如下图1所示。其中,1是螺旋弹簧,2是纵向推力杆,3是减震器,4是横向稳定器,5是定向推力杆。 2悬架刚度分析 2.1悬架垂直刚度分析 悬架系统的垂直刚度可以通过分析悬架两个车轮在同一方向上的运行情况来获得。因为装有发动机的车辆的前轴载荷变化很大,所以前悬架通过调节螺旋弹簧的刚度和自由长度来确保车身姿态。后悬架的轴重变化不大,只有螺旋弹簧的自由长度略有调整,后悬架螺旋弹簧的刚度没有调整。这导致带有发动机的B 车型前悬架刚度略有增加。 除了悬架结构和参数的匹配外,前后悬架固有频率的正确匹配是降低车辆振动耦合度、有效提高车辆乘坐舒适性的重要方法之一。由于B型前悬架的轴重变化很大,通过调整前悬架螺旋弹簧的刚度,前悬架和后悬架的偏置频率比几乎不变。 2.2悬架倾角的刚度分析 一般来说,乘用车的前后侧倾刚度比要求在1.4和2.6之间,以满足略微不足的转向特性的要求。B车型前悬架的侧倾刚度略高于C车型,这是由前悬架刚度的增加引起的。前悬架侧倾刚度的增加有助于减小侧倾角度,但变化很小。 第36卷第3期2002年5月 浙 江 大 学 学 报(工学版) Jo ur nal o f Zhejiang U niv ersity(Eng ineer ing Science) Vol.36No.3May 2002 收稿日期:2001-05-13. 作者简介:蔡忠法(1969-),男,浙江温岭人,讲师,主要从事电子技术和系统仿真的研究.E-m ail:z fcai@m https://www.360docs.net/doc/d43129832.html, 汽车模拟驾驶模型与仿真的研究 蔡忠法,章安元 (浙江大学电气工程学院,浙江杭州310027) 摘 要:在主动型驾驶模拟训练系统中,模拟驾驶舱各个操纵机构存在着多输入、多耦合、非线性的控制作用,而驾驶模拟训练要求驾驶动力学模型适于快速实时仿真.本文使用拟合多项式描述汽车发动机负荷特性,提出结构简化的汽车速度和方向控制模型.对模拟驾驶的仿真结构和学员操作的逻辑判断进行了讨论,通过对操纵机构输入的线性化处理,得到汽车行驶的仿真模型并选择快速仿真算法实现了所建模型.实验结果表明,本文提出的理论模型和仿真算法是正确可行的.关键词:汽车驾驶;模拟器;模型;仿真 中图分类号:T P312 文献标识码:A 文章编号:1008-973X(2002)03-0327-04 Study of automobile emulated driving model and simulation CAI Zhong -fa ,ZHANG A n -yuan (College of Electr ical Eng ineer ing ,Zhej iang U niv er sity ,H angz hou 310027,China ) Abstract :In active automo bile driving training simulato r,the steering framewo rk in the simulated cabin has multi-input,m ulti-co upling and non-linear contro l effect.A driving training sim ulator r equires dynam ic model suitable for fast real -tim e simulation .T his paper uses poly nom ials to express the load characteristics of the automo bile engine ,and presents simplified -str ucture velocity and direction co ntro l models .T he sim ulation structure o f simulated driving and log ic alestimation o f driver oper ation are discussed,and illegal operation of driver and car backing state are judged cor rectly.T hr oug h the linearization process of the steering fr am ew or k input function ,sim ulation models for m ultiple driving cases w ere derived and effectiv e algo rithm w as selected to realize the models.Ex periment results show ed that the presented m odel and simulation alg orithm are corr ect and feasible. Key words :automo bile driving ;simulator ;model ;simulation 汽车驾驶模拟训练系统是通过模拟驾驶舱和计算机实时生成汽车行驶过程中虚拟的视境、音响等驾驶环境,训练正确的驾驶操作.它可取代实车训练中的部分科目和内容,有利于驾驶培训正规化、科学化和规范化,并具有节能、安全、经济、高效等优点,因此,开发适合我国交通国情和道路状况的汽车驾驶模拟训练系统具有重大的社会效益和经济效益.而建立并实现汽车模拟驾驶的动力学模型是研制汽车驾驶模拟训练系统的前提.以往的汽车动力学模型主要是通过汽车部件建模,因而结构复杂,计算时 间长[1] .在基于微机平台的主动型汽车驾驶模拟训练系统中,需建立适合快速实时仿真、结构简化的汽车行驶速度和方向控制模型,以确定汽车行驶的世界坐标位置,控制图形生成系统动态生成虚拟视景.在主动型汽车驾驶模拟训练系统中,图形实时生成系统占据了大部分CPU 时间,因此需要在模型的逼真度与复杂性之间作一折中.为了满足模拟训练的要求,简化模型结构和选择合适的快速仿真算法是实现驾驶实时仿真所必须首先考虑的问题. 车辆跟驰模型研究综述 学号:14S032034 姓名:孟柳 1、早期车辆跟驰模型 1.1 Pipes与Forbes的跟驰模型 Pipes的车辆跟驰模型源于加利福尼亚机动车法规中对驾驶员跟驰行驶的建议:在跟随行驶过程中,安全距离至少为一个车身长度,并随速度每增加16km/h,就增加一个车长。 Pipes与Forbes的跟驰模型是早期的研究成果,其工作具有开创的意义,虽然随着对这一领域的深入研究,其模型精度已不能令人满意。但其形式简单,物理意义明确,在实际当中仍然得到了广泛应用。 1.2 刺激--反应模型 刺激--反应模型重在描述驾驶环境中各种刺激对驾驶员行为的影响,包括GM模型和线性跟车模型。GM模型最早是1958年由美国通用汽车研究小组的Chandler,Herman和Montroll提出的,它是由驾驶动力学模型(Driving Dynamic Model)推导而来,并引入如下理念: Response=f(sensitivit,stimuli) 式中,Response为后车在时刻t+T的加速度或减速度;sensitivity为后车对刺激的敏感度;stimuli为在时刻t后车与前车的相对速度;T是后车驾驶员的反应时间。 这个模型的基本假设为:驾驶员的加速度与两车之间的速度差成正比;与两车的车头间距成反比;同时与自身的速度也存在直接的关系。GM模型清楚地反映出车辆跟驰行驶的制约性、延迟性及传递性。 GM跟驰模型的优缺点: GM跟驰模型形式简单,物理意义明确。作为早期的研究成果,具有开创意义,许多后期的跟驰模型研究都是以其建立的刺激--反应的方程为基础,在前车紧急刹车时,后车维持不致发生尾撞的最小安全距离为前提推导而得。 但是,GM模型的通用性较差,现在较少使用GM模型,这是因为在 公交车调度模型 (故可视作环行线,见下图) 记 v :公交车速度; t(k): 第k 次发车时刻(k=1,2,……,N ); d(j): 第Bj 站到第Bj+1站的距离(km)(j=1,2,……,25); t1(k,j):第k 次发车到达第j 站的时刻:t1(k,j)=t(k)+[d(1)+d(2)+……+d(j))]/v; (j=2,……,26) T : 公交车环行周期(h ); mu :矩阵元素mu(i,j)为第i 个时间段第j 个站上车人数(i=1,2,……,18, j=1,2,……,26); md :矩阵元素md(i,j)为第i 个时间段第j 个站下车人数(i=1,2,……,18, j=1,2,……,26);; z(k,j): 第k 次发车第j 个站启车时乘客增量:z(k,j)=f(t(k),j)×[t(k,j)-t(k-1,j)]( j=1,2,……,25);其中 0,t(k )5and t(k )23f (t(k ),j)m u (i1,j)m d (i2,j),else i1[t(k )(d (1)...d (j 1))/v]4,i2[t(k 1)]4<>?=?-?=+++--=--其中 s(k,j):第k 次发车第j 站启车时车上乘客数 s(k,j)=[z(k,1)+ z(k,2)+……+z(k,j)] ( j=1,2,……,25); 优化模型 目标函数:max t(k) 约束条件:25j 1 t(k )t(k 1)10; 1s(k ,j)50;25s(k ,j)120,j 1,2,3,...,25;=?--<=??>=???<==? ∑ sets : fache/1/:t; distance/1..25/:d; time_stage/1..18/; zhan/1..26/:i0,i1,i3; link1(time_stage,zhan):mu,md; !汽车动力学发展历史简介 汽车动力学是伴随着汽车的出现而发展起来的 一门专业学科。人们很早就认识到“$%&’()*+”转向和应用弹性悬架可使乘客感到更加舒适等基本原 理[,],但那只是一种感性的认识。在各国学者的不懈 努力下,这门学科逐渐发展成熟。-’.’/在,00#年1)’%23举行的题为“车辆平顺性和操纵稳定性”的会议上发表的论文,对,00"年以前汽车动力学的发 展做了较为全面的总结[ !],见表,。近年来汽车动力学又有了进一步发展,大量的高水平学术论文和经典的汽车动力学专著相继被发表,而且开发出许多专为汽车动力学研究建立模型的软件,如美国密西根大学开发的$456%*(、$45678)等商业软件。汽车是一复杂的连续体系统,要想对其进行动力特性的预测和优化需建立经合理简化的抽象汽车模型,以达到缩短产品开发周期、保证整车性能指标和降低产品成本的目的。 "汽车动力学模型的发展 汽车动力学从严格意义上来讲包括对一切与车 辆系统相关运动的研究,然而最为核心的是平顺性和操纵稳定性这两大领域,一般认为平顺性主要研究影响车身的垂向跳跃、俯仰、侧倾振动的因素,而操纵稳定性主要研究车辆的横向、横摆和侧倾运动。建模时一般假设平顺性和操纵稳定性之间无偶合关系。 "#!汽车平顺性模型 在汽车平顺性的早期研究阶段,限于当时数学、 力学理论、计算手段及试验方法,把系统简化成集中质量—弹簧—阻尼模型,如图,所示。 图,整车集中质量—弹簧—阻尼模型 此类模型一般先以函数的形式给出其动能!和势能"以及表达系统阻尼性质的物理量耗散能 !的表达式: 【摘要】汽车动力学包括对一切与车辆系统相关运动的研究,其最核心的是平顺性和操纵稳定性这两大领域。在简要说明了汽车动力学发展过程的基础上介绍了平顺性和操纵稳定性两大领域的模型发展过程。平顺性模型主要经过集中质量—弹簧—阻尼模型、有限元模型和动态子结构模型阶段;而操纵稳定性模型从低自由度线性模型、非线性多自由度模型发展到多体模型。最后提出了汽车动力学仿真模型的发展动向。 主题词:汽车动力学模型发展 中图分类号:9:;,<,文献标识码:$ 文章编号:,"""=#>"#(!""#)"!=""",=": $%&%’()*%+,(-.%/01’%$2+3*0140*5’3,0(+6(7%’ ?2*+.@’8A?2*+.B8+.2*8AC48D*8/8+AB8*D6+.E’8 (B8/8+9+8F’(785G ) 【89:,;31,】H’28%/’IG+*)8%7754I8’7*//)6F’)’+57(’/’F*+556F’28%/’7G75’)*+I 857%6(’8752’5J6E8’/I76E (8I’K *L8/85G *+I 2*+I/8+.75*L8/85G<1+52’M*M’(AI’F’/6M8+.M(6%’776E )6I’/76E F’28%/’(8I’*L8/85G *+I 2*+I/8+.75*L8/85G *(’8+K 5(6I4%’I *E5’(I’F’/6M)’+5%64(7’6E F’28%/’IG+*)8%78778)M/G 8+5(6I4%’I 汽车行业中的假人 假人在汽车行业中有着的十分重要的角色,无论是前期设计还是后期试验,他们都必不可少,甚至可以说他们就是“无名英雄”。 首先让我们简单的了解一下假人。 所谓的假人其实就是人体模型,它的各部分尺寸与质量都近似真人。由于人的体型和重量可能会存在很大差异,所以假人的规格也有所不同。 一般分为95%假人(即95%的成年男子的体重和座高等参数要比该假人低)、50%假人(即50%的成年男子的体重和座高等参数要比该假人低)和5%假人(即5%的成年女子的体重和座高等参数要比该假人低)。 三种假人尺寸,分别代表高大身材、平均身材和矮小身材的人体尺寸。车身设计中,常把第95%的值作为设计上限,把第5%的值作为下限。这样的设计结果即可满足90%的使用对象。 在汽车设计和试验中所采用的人体模型用途不同,种类不一。常见的有‘H点人体模型’和‘碰撞试验人体模型’等。 H点人体模型: H点人体模型是由背板部、座板部、小腿部及足部等构成。 H点是人体身躯与大腿的连接点,即跨点。它是汽车设计中最重要的参考点之一。有了H点人体模型,就可以很快确定H点的位置,之后整车和系统的总布置流程也就随之拉开了序幕。 汽车碰撞人体模型: 汽车碰撞人体模型在碰撞试验中代替了真人,以便分析碰撞瞬间的各项技术数据。主要测量目标有头部、颈部、双臂、胸部、腹部、盆骨、大腿、小腿以及脚部。因此除了与真人各个特征相近外,它的身体上还遍布着各种各样的传感器(大约60多个)。 作为汽车安全性的“第一体验者”,假人的贡献巨大。随着制作假人的材料和技术越来越先进,试验数据越来越全面,公路车祸致死人数越来越少。而假人在一次次猛烈撞击,一次次支离破碎后,早已不再是人类的替身,而是成为了保护人类的英雄。 从吸能说起看汽车碰撞理论分析 汽车碰撞的理论分析,具有高中物理知识的就可以看懂,好好学习学习! 吸能对于车车碰撞是致命的,现在的车祸车车碰占80%以上,碰树撞墙掉悬崖毕竟 只是少数,转一篇帖子吧 当前汽车的碰撞实验的一个陷阱就是:不同车型都是对着质量和强度都是无限大 的被撞物冲击。然后以此作为证据,来证明自己汽车的安全性其实是差不多的,这是 极端错误的。 举个例子:拿鸡蛋对着锅台碰,你可以发现所有的鸡蛋碎了,而且都碎得差不 多,于是可以得出鸡蛋的安全性都差不多。可是你拿两个鸡蛋对碰呢,结果是一边损 坏一半吗? 错!你会发现,一定只有一个鸡蛋碎了,同时另一个完好无损! 问题出现了:为什么对着锅台碰都差不多,但是鸡蛋之间对碰却永远只有一个碎 了?这个实验结果与汽车碰撞有关系吗? 原因就在于:当结构开始溃败时,刚度会急剧降低。让我们仔细看一下鸡蛋碰撞 的过程吧!1,两个鸡蛋开始碰撞一瞬间,结构都是完好的,刚性都是最大;2,随着 碰撞的继续,力量越来越大,于是其中一个刚性较弱的结构开始溃败;3,不幸发生 了,开始溃败的结构刚度急剧降低,于是,开始溃败就意味着它永远溃败,于是所有 的能量都被先溃败的一只鸡蛋吸走了。 我们在看看汽车之间的碰撞吧(撞锅台,大家的结果当然都一样!)。1,开 始,两车的结构都是完好的,都在以刚性对刚性;2,随着碰撞的继续,力量越来越 大,于是刚性较弱的A车的结构开始溃败,大家熟知的碰撞吸能区开始工作;3,不幸 再次发生,因为结构变形,A车的结构刚度反而更急剧降低,于是开始不停的"变 形、吸能";4,在A车的吸能区溃缩到刚性的驾驶仓结构之前,另一车的主要结构保持 刚性,吸能区不工作。 结论:两车对碰,其中一个刚度较低的,吸能区结构将先溃败并导致刚度降低,最终将承受所有形变,并吸收绝大部分的碰撞能量。车辆悬架模型的仿真与分析
汽车模拟驾驶模型与仿真的研究
早期车辆跟驰模型研究综述
公交车调度模型
汽车动力学仿真模型的发展
汽车行业中的假人
看汽车碰撞理论分析