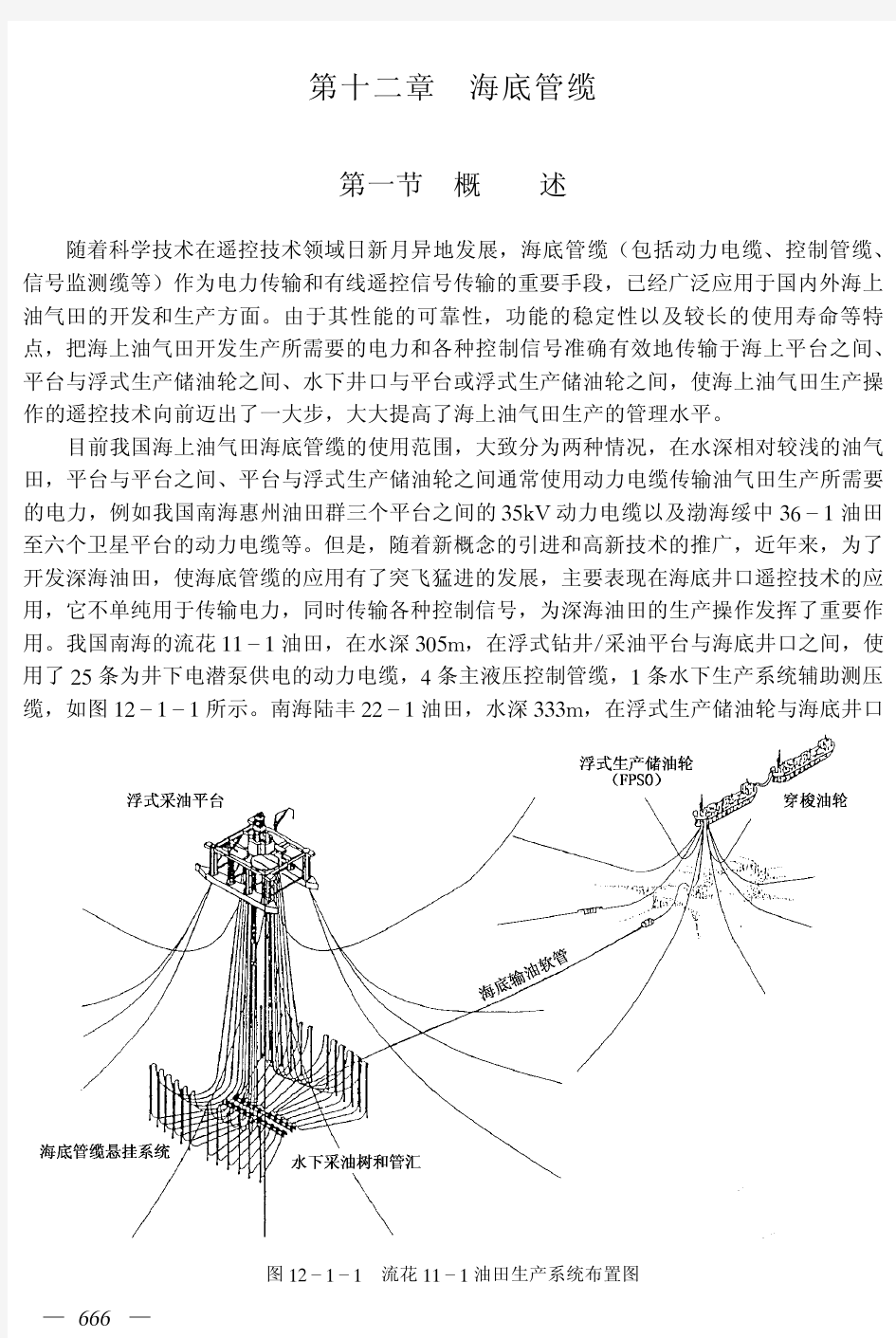
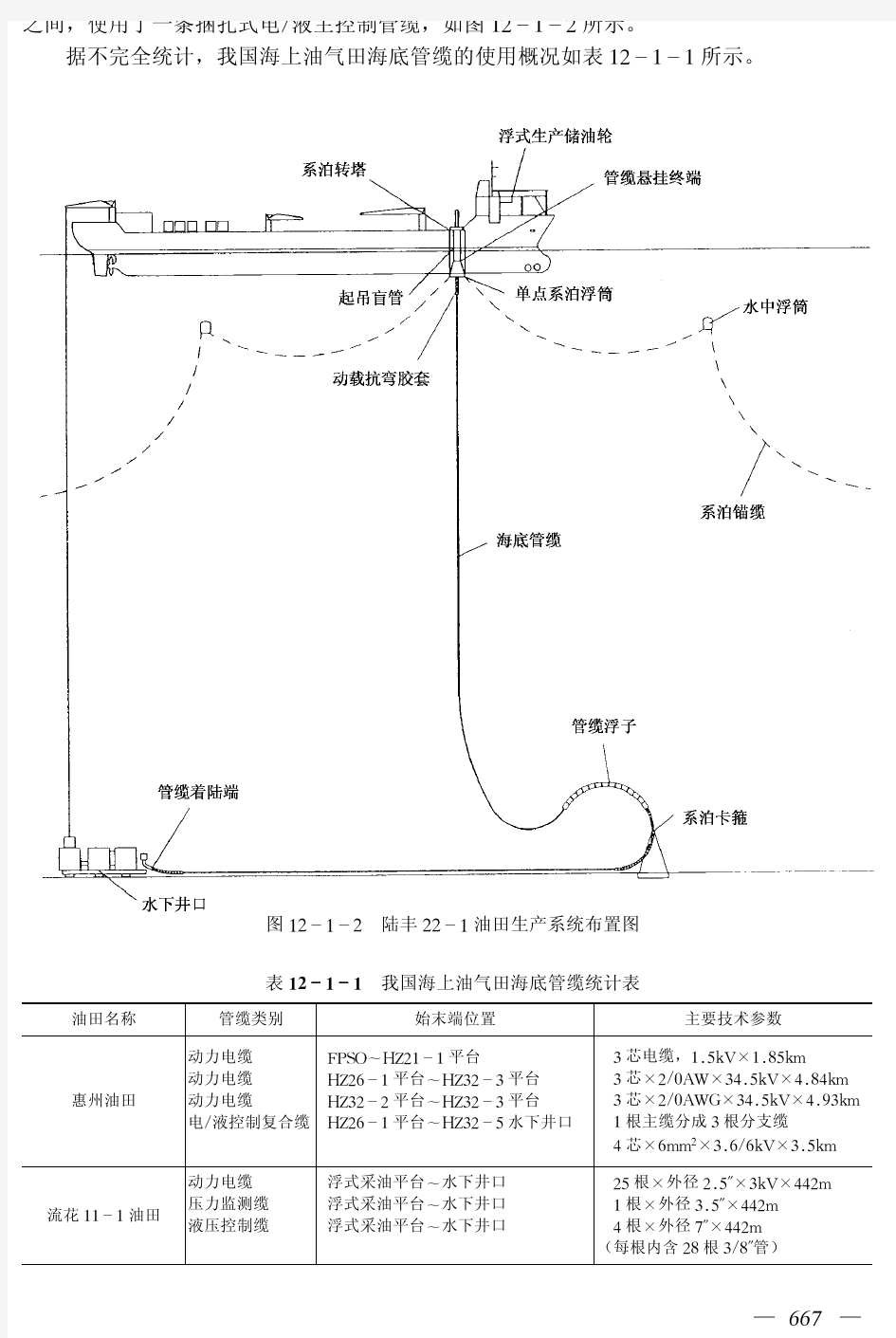
海底管缆
海洋立管的局部冲刷实验
第31卷第6期2009年12月沈阳工业大学学报Journal of Shenyang University of Technology Vo l.31No.6Dec.2009 收稿日期:2008-12-18. 基金项目:国家自然科学基金资助项目(50409015).作者简介:陈 兵(1970-),男,辽宁大连人,副教授,主要从事港口工程结构等方面的研究. 文章编号:1000-1646(2009)06-0712-09 海洋立管的局部冲刷实验 陈 兵,邵 学,韩丽华,姜 萌 (大连理工大学土木水利学院,辽宁大连116024) 摘要:海洋平台立管底部的局部冲刷容易造成海底管道的暴露悬空,在波浪和水流作用下产生 疲劳破坏, 以往的研究多偏重于海底管道水平段局部冲刷,而对立管底部开始的局部冲刷研究较少.针对这些问题,通过实验室物理模型实验,利用波流水槽对波-流共存以及纯波浪条件下海洋平台立管-桩系统基础周围的局部冲刷进行了研究.通过实验观测立管系统周围海底地形的冲淤变化过程,得到冲刷稳定后的地形形态、各冲深监测点的冲深历时曲线及最大冲刷深度.通过对实测数据的分析,探讨了水深、波高、恒定来流流速、立管-桩系统倾斜角度以及床面泥沙粒径等参数对冲刷形态和最大冲刷深度的影响.关 键 词:海洋平台立管;立管-桩系统;波流共存场;物理模型实验;局部冲刷;最大冲刷深 度;冲淤形态;冲深历时曲线 中图分类号:U 656.6 文献标志码:A Physical model test for local scour around marine riser CHEN Bing ,SHAO Xue ,HAN Li-hua ,JIANG Meng (School of Civil and Hydraulic Engineering ,Dalian University of Technology ,Dalian 116024,China ) Abstract :The local scour at the bottom of marine riser is easy to result in the exposure and suspension of sea-bed pipeline ,and thus the fatigue damage of the pipeline occurs due to the action of wave and flow.The pre-vious researches concerning the local scour problem of seabed pipeline mainly focus on the scour around a hor-izontal span rather than that at riser bottom.Thus ,the physical model tests utilizing wave-flow flume were con-ducted to investigate the local scour around a riser-pile system in both coexistng wave-flow and pure wave con-ditions.The change process in the sea bottom terrain around the riser system was observed.The scoured ter-rain of the sea bottom as well as the scour depth-time curve and maximum scour depth at different inspection points were recorded.Based on the meassured data ,the influnce of such parameters as water depth ,wave height ,flow velocity ,incline angle of riser-pile system and particle size of sediment on the scour pattern and maximum scour depth were discussed. Key words :marine riser ;riser-pile system ;coexsiting wave-flow field ;physical model test ;local scour ; maximum scour depth ;scour pattern ;scour depth-time curve 国民经济的迅速发展及各行各业对能源需求 与日俱增,使海洋石油天然气的开发显得十分迫切.在海洋油气田的开采、 油气的储存、运输过程中常需要利用海底输油(气)管道和海洋平台立管.虽然随着海洋工程不断发展,海底输油(气)管道及海洋平台立管的局部冲刷问题逐渐地被关 注与重视,但是对波流共同作用下海洋平台立管 周围的局部冲刷研究却较少. 海洋平台立管是海洋结构系统中薄弱易损的构件,作为海上平台油气设施与海底管道的联系通道,其下端一般直触海床,上端则连于平台或者钻探船舶的油气设施.在波浪和水流作用下的立
《海底电缆管道保护规定》
《海底电缆管道保护规定》(2004年1月9日公布) 《海底电缆管道保护规定》,已经2003年12月30日国土资源部第12次部务会议通过,现予公布,自2004年3月1日起施行。《海底电缆管道保护规定》,由国家海洋局负责监督执行。 部长孙文盛 二○○四年一月九日 海底电缆管道保护规定 第一条为加强海底电缆管道的保护,保障海底电缆管道的安全运行,维护海底电缆管道所有者的合法权益,根据《铺设海底电缆管道管理规定》和有关法律、法规,制定本规定。 第二条中华人民共和国内海、领海、大陆架及管辖的其他海域内的海底电缆管道的保护活动,适用本规定。 军事电缆管道的保护活动,不适用本规定。 第三条国务院海洋行政主管部门负责全国海底电缆管道的保护工作。 沿海县级以上地方人民政府海洋行政主管部门负责本行政区毗邻海域海底电缆管道的保护工作。 第四条任何单位和个人都有保护海底电缆管道的义务,并有权对破坏海底电缆管道的行为进行检举和控告。 第五条海底电缆管道所有者应当在海底电缆管道铺设竣工后90日内,将海底电缆管道的路线图、位置表等注册登记资料报送县级以上人民政府海洋行政主管部门备案,并同时抄报海事管理机构。 本规定公布施行前铺设竣工的海底电缆管道,应当在本规定生效后90日内,按照前款规定备案。 第六条省级以上人民政府海洋行政主管部门应当每年向社会发布海底电缆管道公告。 海底电缆管道公告包括海底电缆管道的名称、编号、注册号、海底电缆管道所有者、用途、总长度(公里)、路由起止点(经纬度)、示意图、标识等。
第七条国家实行海底电缆管道保护区制度。 省级以上人民政府海洋行政主管部门应当根据备案的注册登记资料,商同级有关部门划定海底电缆管道保护区,并向社会公告。 海底电缆管道保护区的范围,按照下列规定确定: (一)沿海宽阔海域为海底电缆管道两侧各500米; (二)海湾等狭窄海域为海底电缆管道两侧各100米; (三)海港区内为海底电缆管道两侧各50米。 海底电缆管道保护区划定后,应当报送国务院海洋行政主管部门备案。 第八条禁止在海底电缆管道保护区内从事挖砂、钻探、打桩、抛锚、拖锚、底拖捕捞、张网、养殖或者其他可能破坏海底电缆管道安全的海上作业。 第九条县级以上人民政府海洋行政主管部门有权依照有关法律、法规以及本规定,对海底电缆管道保护区进行定期巡航检查;对违反本规定的行为有权制止。 第十条国家鼓励海底电缆管道所有者对海底电缆管道保护区和海底电缆管道的线路等设置标识。 设置标识的,海底电缆管道所有者应当向县级以上人民政府海洋行政主管部门备案。 第十一条海底电缆管道所有者在向县级以上人民政府海洋行政主管部门报告后,可以对海底电缆管道采取定期复查、监视和其他保护措施,也可以委托有关单位进行保护。 委托有关单位保护的,应当报县级以上人民政府海洋行政主管部门备案。 第十二条海底电缆管道所有者进行海底电缆管道的路由调查、铺设施工,对海底电缆管道进行维修、改造、拆除、废弃时,应当在媒体上向社会发布公告。 公告费用由海底电缆管道所有者承担。 第十三条海上作业者在从事海上作业前,应当了解作业海区海底电缆管道的铺设情况;可能破坏海底电缆管道安全的,应当采取有效的防护措施。 确需进入海底电缆管道保护区内从事海上作业的,海上作业者应当与海底电缆管道所有者协商,就相关的技术处理、保护措施和损害赔偿等事项达成协议。 海上作业钩住海底电缆管道的,海上作业者不得擅自将海底电缆管道拖起、拖断或者砍断,并应当立即报告所在地海洋行政主管部门或者海底电缆管道所有者采取相应措施。必要
海洋钻井平台组成及功能
关于海洋钻井平台 半潜式的系统,总的来说,平台的系统有点和普通的船舶相似,它们是: 1,压载系统,ballast system 2,消防系统,fifi system ,包含fire water system , water mist system , deluge system, foam system, co2 extinguishsystem, water spray system 按照每个平台基本设计的不同,会有其中的几个。 3,舱底水系统,bilge system 4, 海水冷却系统,sea water cooling system 5,淡水冷却系统,fresh water cooling system 6,燃油系统,fuel oil system 7,润滑油系统,lub oil system 8,主机排烟系统,exhaust system 9,废油系统,waste oil and sludge system 10,透气溢流系统,vent and overflow system 11,测深系统,souding system 包含 manual soundIng system 或者remote sounding system 12,启动空气系统,starting air system 13,平台空气系统,rig air system 14,仪表与控制空气系统, instrument air system 15,饮用水系统,potable system 16,生活水排放系统,sanitary discharege system 17,生活水供给系统 ,sanitary supply system 18,盐水系统,brine system 19,钻井水液系统,drill water system 20,钻井基油系统,base oil system 21,泥浆供给系统,mud supply system 22,高压泥浆排出系统,mud discharge system 23,泥浆处理系统,mud process system 24,泥浆真空系统,mud vacuum system 25,井口控制系统,subsea control system 26,分流器,高压管系系统,hp manifold and diverter system 27,灌井系统,trip tank system 28,除气系统,mud gas separator system 29,测井系统,well test system 30,隔水套管张紧系统,riser tensioner system 31,液压系统,hydaulicoil system 32,泥浆混合系统,mud mixing system 33,散货系统,包含bulk cement system 以及bulk mud system 34,高压冲洗系统,high pressure washing down system 35,甲板泄水系统,deck drain system 36,快关阀系统,quick closing vavle system 37,切屑处理系统,cutting handling system 38,直升机加油系统,helicopter refueling system 39,排舷外系统,overboard discharge system 40,刹车冷却系统,brake cooling system 41,呼吸空气系统,breath air system 42,推进器系统,包含 thruster hydraulic oil and lub oil system 43,泥坑冲洗系统,mud pit washing system
海洋自动观测系统招标技术要求
海洋自动观测系统招标技术要求 型号:CZY1型海洋监测站自动监测系统 海洋自动观测系统由气象子系统、水文子系统和数据处理控制子系统三部分组成,子系统可通过专线、电话、CDMA GPRS VHF卫星等方式与数据处理控制子系统通信。其中,气象子系统由风速风向传感器、气压传感器、气温相对湿度传感器、降雨量传感器、以及数据采集器组成;水文子系统由水温盐度传感器、浮子式水位计组成。气象子系统和水文子系统要求体积小、功耗低、集成度高、扩充灵活、抗雷击性能强的特点,适合野外安装使用。数据处理控制子系统主机采用工控机,数据的采集、处理、接收、存储、显示、编报、月报、转发等符合《海滨观测规范》(GB/T 14914-2006 )和国家海洋数据传输网的要求。通信方式和集成方式灵活,可以满足不同海洋站的各种需要。整个系统层层采用模块化设计,维修方便。 1、系统主要技术指标及要求 1.1.系统测量要素、范围和和准确度见下表 表1.1系统测量要素、范围和和准确度: 1.2系统技术指标 1.2.1温盐传感器
水温测量范围:(-5?+50) C 准确度:土0.2 C 分辨率:0.05 C 盐度测量范围:8?42 准确度:土0.4 分辨率:0.1 输出信号:数字量 传输距离:不小于1000米。 工作电压:(9.5?28) VDC 功耗:38 mA (12 VDC 1.2.2浮子式验潮仪 (1) 工作温度:(-30 ?60) C (2)存储条件:(-40?60) C (3)测量范围:(0?1000) cm (4)准确度:土 1 cm (5)分辨率:1 mm (6)工作电压:(10?15) VDC (7)系统功耗:0.8W, 1.4W(背光) (8)数据存储:每分钟1组数据,能存储90天每分钟的潮位及高低潮时潮高、表层水温、盐度。 (9)数据显示:带背光的点阵字符型液晶显示器,更新周期1秒,具有现场打印、显示所测数据(瞬时潮、高低潮、潮高、潮时、等)功能。 (10)数据传输:可选用RS232/422/485、DDN专线、CDMA/GPRSVHF卫星通信、SDH专线、电话、GSM方式传输数据,与数据处理控制子系统连接,进行实时传输和存储资料调取,将数据转存到硬盘或软盘上。 (11)可靠性:平均无故障工作时间大于5000小时,平均故障恢复时间小于0.5 小时 (12)可维性:系统采用模块化设计,便于安装和维护。 (13)扩充性:预留一个串口、2路A/D、2路频率量口。 (14)高低潮判别:显示和存储数据为每3秒钟采集1次,连续采样1min,经
海洋平台介绍
国际浮式生产储油卸油船(FPSO)发展态势: FPSO(Floating Production Storage and Offloading)浮式生产储油卸油船,它兼有生产、储油和卸油功能,油气生产装置系统复杂程度和价格远远高出同吨位油船,FPSO装置作为海洋油气开发系统的组成部分,一般与水下采油装置和穿梭油船组成一套完整的生产系统,是目前海洋工程船舶中的高技术产品。 韩国船企对FPSO建造具有较强规模效应。如现代重工专门建有FPSO海洋项目生产厂,已交付了6艘大型FPSO;三星重工手中持有5艘大型FPSO订单;大宇造船海洋工程公司则是全球造船企业中建造海上油气勘探船最多的企业,2005年承接海洋项目设备订单计划指标是17亿美元。据海事研究机构(DW)预计,未来5年内FPSO新增需求将会达到84座,投资额约为210亿美元。 FPSO主要技术结构表: FPSO主要技术结构 FPSO主要结构功能 系泊系统:主要将FPSO系泊于作业油田。FPSO在海域作业时系泊系统多采用一个或多个锚点、一 根或多根立管、一个浮式或固定式浮筒、一座转塔或骨架。FPSO系泊方式有永久系泊和 可解脱式系泊两种; 船体部分:既可以按特定要求新建,也可以用油轮或驳船改装; 生产设备:主要是采油和储油设备,以及油、气、水分离设备等; 卸载系统:包括卷缆绞车、软管卷车等,用于连接和固定穿梭油轮,并将FPSO储存的原油卸入穿梭 油轮。其作业原理是通过海底输油管线把从海底开采出的原油传输到FPSO的船上进行处 理,然后将处理后的原油储存在货油舱内,最后通过卸载系统输往穿梭油轮。 配套系统:在FPSO系统配置上,外输系统是其关键的配套系统。 FPSO主要优点随着海洋油气开发、生产向深海不断进入,FPSO与其它海洋钻井平台相比,优势明显,主要表现在以下四个方面: (1)生产系统投产快,投资低,若采用油船改装成FPSO,优势更为显著。而且目前很容易找到船龄不高,工况适宜的大型油船。 (2)甲板面积宽阔,承重能力与抗风浪环境能力强,便于生产设备布置;
海底电缆管道铺设路由调查勘测审批服务指南
海底电缆管道铺设路由调查勘测审批 服务指南 一、适用范围 本指南适用于海底电缆管道路由调查勘测的申请和办理。 二、事项信息 (一)项目名称:海底电缆管道铺设路由调查勘测、铺设施工审批 (二)子项名称:海底电缆管道路由调查勘测审批 (三)审批类别:行政许可 (四)项目编码:51002-1 三、事项审查类型 前审后批 四、审批依据 (一)《中华人民共和国领海及毗连区法》(主席令第55号); (二)《中华人民共和国专属经济区和大陆架法》(主席令第6号); (三)《铺设海底电缆管道管理规定》(国务院令第27号); (四)《铺设海底电缆管道管理规定实施办法》(国家海洋局令第3号); (五)《国家海洋局关于铺设海底电缆管道管理有关事项的通知》(国海规范[2017]8号)。 五、受理机构 自然资源部及海区局 六、决定机构 自然资源部及海区局 七、审批数量 无数量限制
八、申请条件 (一)申请人条件 海底电缆管道所有者。 (二)受理权限 1.路经中国管辖海域和大陆架的外国海底电缆管道; 2.由中国铺向其他国家和地区的国际海底电缆管道; 3.国内长距离(200公里以上)的海底管道; 4.污水日排放量在20万吨以上的海底排污管道; 上述事项由自然资源部负责审批,其他事项由自然资源部海区局负责审批。(三)具备或符合如下条件的,准予批准: 1.申请、受理符合规定程序和要求; 2.预选海底电缆管道路由符合海洋功能区划; 3.海底电缆管道项目符合国家有关产业政策; 4.预选海底电缆管道路由所经海域不影响国防安全、无重大利益冲突; 5.路由调查勘测实施方案可行,内容全面。 (四)不符合上述条件之一的,不予批准。 九、申请材料 (一)申请材料清单
海洋钻井平台的分类
海洋钻井平台的分类 海洋钻井平台(drilling platform)是主要用于钻探井的海上结构物。平台上装钻井、动力、通讯、导航等设备,以及安全救生和人员生活设施,是海上油气勘探开发不可缺少的手段。主要分为移动式平台和固定式平台两大类。其中按结构又可分为: (1)移动式平台:坐底式平台、自升式平台、钻井船、半潜式平台、张力腿式平台、牵索塔式平台(2)固定式平台:导管架式平台、混凝土重力式平台、深水顺应塔式平台 坐底式钻井平台 坐底式钻井平台又叫钻驳或插桩钻驳,适用于河流和海湾等30m以下的浅水域。坐底式平台有两个船体,上船体又叫工作甲板,安置生活舱室和设备,通过尾郡开口借助悬臂结构钻井;下部是沉垫,其主要功能是压载以及海底支撑作用,用作钻井的基础。两个船体间由支撑结构相连。这种钻井装置在到达作业地点后往沉垫内注水,使其着底。因此从稳性和结构方面看,作业水深不但有限,而且也受到海底基础(平
坦及坚实程度)的制约。所以这种平台发展缓慢。然而我国渤海沿岸的胜利油田、大港油田和辽河油田等向海中延伸的浅海海域,潮差大而海底坡度小,对于开发这类浅海区域的石油资源,坐底式平台仍有较大的发展前途。80年代初,人们开始注意北极海域的石油开发,设计、建造极区坐底式平台也引起海洋工程界的兴趣。目前已有几座坐底式平台用于极区,它可加压载坐于海底,然后在平台中央填砂石以防止平台滑移,完成钻井后可排出压载起浮,并移至另一井位。图为胜利二号坐底式钻井平台。 自升式钻井平台由平台 自升式钻井平台由平台、桩腿和升降机构组成,平台能沿桩腿升降,一般无自航能力。工作时桩腿下放插入海底,平台被抬起到离开海面的安全工作高度,并对桩腿进行预压,以保证平台遇到风暴时桩腿不致下陷。完井后平台降到海面,拔出桩腿并全部提起,整个平台浮于海面,由拖轮拖到新的井位。1953年美国建成第一座自升式平台,这种平台对水深适应性强,工作稳定性良好,发展较快,约占移动式钻井装置总数的1/2。 钻井船
海洋平台
海洋平台的现状和发展趋势 作者:荆永良 引言 海洋平台对海洋资源的开发和空间利用的发展,以及工程设施的大量兴建,对人类文明的演化将产生不可估量的影响。 正文 1、海洋平台技术概述 海洋工程项目是一个庞大的科技系统工程,而主要针对海洋石油开采而言的海洋工程装备包括油气钻采平台、油气存储设施、海上工程船舶等。这其中的海洋平台是集油田勘测、油气处理、发电、供热、原油产品储存和运输、人员居住于一体的综合性海洋工程装备,是实施海底油气勘探和开采的工作基地。 海洋平台结构复杂、体积庞大、造价昂贵,特别是与陆地采油设备相比,它所处的海洋环境十分复杂和恶劣,台风、海浪、海流、海冰和潮汐还有海底地震对平台的安全构成严重威胁。与此同时,由于环境腐蚀、海生物附着、地基土冲刷和基础动力软化、构件材料老化、缺陷损伤扩大以及疲劳损伤累积等因素都将导致平台结构构件和整体抗力逐渐衰减,影响平台结构的服役安全性和耐久性。因此,海洋平台的设计与制造只有在一个国家的综合工业水平整体提高与进步的基础上才能完成。 2、海洋平台的类型分类 (1)、按运动方式可分为固定式与移动式两大类(如图) (2)、按使用功能的不同可分为钻井平台、生产平台、生活平台、储油平台、近海平台等。 3、海洋平台的发展及现状 3.1国内海洋平台的发展及现状 我国海洋工业开始于60 年代末期,最早的海洋石油开发起步于渤海湾地区,该地区典型水深约为20 m。到了80 年代末期,在南中国海的联合勘探和生产开始在100 m 左右水深的范围内进行,直到现在,我国的油气勘探和开发工作还没能突破400 m 水深。近年来,石油、石油化工装备工业以我国石油和石油化工工业为依托,取得了长足的发展。尤其是近年来世界各国对石油能源开发的重视和原油价格的飚升,更是极大拉动了国内海上平台设备制
课程设计实例-海底管道立管.
前言 经济的高速发展必然带来能源的大量消耗,寻求廉价而供应充足的能源已经成为各国经济发展的重大问题。科学技术的发展的现状表明:太阳能、地热能利用和开发还处于初级阶段,在能源消耗总额中占的比重也很少;核能正在发展,所占的比重正在逐渐提高,但也受到技术水平、铀矿资源的限制;在核聚变能量被工业大量实际应用以前,石油天然气等燃料仍然是社会使用的主要资源;而石油由于比较容易开采、运输和利用,就必然成为现代国民经济的重要支柱。世界上大量的政治、军事、经济的运动都是围绕石油问题进行的。勘探表明,在大陆架的39%地区含有油气构造,其储量占全世界石油的30%~40%。而美国的墨西哥湾、欧洲的北海、西亚的波斯湾、北非海域以及南中国海域、渤海海域都已成世界各国开发海洋石油资源的重要场所。目前在各大洲大陆架的不同工作水域有各种类型的近海工程结构物,主要应用于海底油气资源的勘探和开发。 海洋立管是浮式海洋平台与海底井口间的主要连接。作为海面与海底的一种连接通道,它也可用于固定式平台及勘探船。下端通过万向节与海底井口连接,其上端与平台或船舶底部的滑移节配合,这样,平台或船舶在波浪作用下发生任何可能的运动时,立管有足够的运动自由度随之运动,并在平台或船舶发生垂直震荡是改变其长度。立管本质上有两种,即刚性立管和柔性立管。海洋立管具有多种可能的结构,如顶张力立管(TTP)、自由悬挂的钢悬链线立管(SCR),惰性S立管,陡峭型S立管,惰性波浪立管、陡峭型波浪立管等。 立管的设计应该满足实际的海洋环境载荷,小直径的立管通常被固定在隔水套管中,海洋环境在核对其影响较小。较大直径立管科直接由平台支持置于海洋环境载荷中,此时,立管将同时承受内流体流动的作用和管外海洋环境载荷作用。立管所承受的海洋环境载荷主要有风、浪、流、冰和地震载荷等,其中波浪和海流是最重要的海洋荷载。并且受水流作用的工程结构都有可能发生涡激振动。 目前海中立管的动力设计计算并不考虑内流体的流动作用,这样设计是不合理的,也是不安全的。但由于知识与数据的缺乏,本设计将不对内流体的流动作用进行设计。
欧洲国家的海洋观测系统介绍
欧洲国家的海洋观测系统介绍 欧洲社会经济发展离不开海洋科技和海洋经济的支撑,因此他们十分重视海洋科技发展和海洋环境保障能力建设,而海洋观测系统的建设是提升海洋环境保障能力的基础。几十年前,欧洲的海洋观测系统都是各个国家自行建设,规模不大,而且主要为本国服务。近年来,区域社会经济的发展、区域和全球的环境问题以及全球经济危机,使欧洲国家有许多共同的海洋利益,面对许多共同的环境和资源问题。因此,建设资源共享的海洋观测系统,共享海洋信息和信息产品资源,以加速区域社会经济发展和应对环境灾害,成为他们共同关注的焦点问题之一。于是,欧洲的海洋观测系统呈现出在欧盟框架下的集成和共享的发展趋势,目前,由欧洲科学基金会主持的欧洲海洋观测与数据网络(EMODNET)在系统建设和运行中,明显表现出先进工业国家的技术和管理优势。该系统的建设将增强欧洲在全球气候变化和环境污染等方面所面临挑战的应对能力,同时提高区域海洋管理、资源利用和环境保护能力。 欧洲具有先进的海洋观测技术,其海洋观测系统的建设经验对我们有很好的借鉴意义。首先他们根据海洋经济的发展需要建设了局域海洋观测系统,之后为研究和解决海洋环境问题并发挥观测系统的系统效益,他们对现有观测系统进
行了大规模的集成和二次开发,在此基础上建成了区域海洋观测系统,从而显著提升了为海洋科学研究和海洋经济发展服务的水平。对于这种高技术和高投入的海洋观测集成系统,欧盟在经费投入和组织协调方面发挥了重要作用。 一、英国的CEFAS海洋观测系统 英国的全国海洋观测系统是由英国环境、渔业及水生物研究中心CEFAS)与英国气象局等单位合作建设的,最初的目的是为海洋渔业服务。CEFAS拥有波浪观测站14个,温度和盐度观测站38个,智能化生态监测浮标19个。在CEFAS 网站上可以看到关于各种鱼群、鱼疾病以及鱼捕食的信息,可以看到英国海岸区域海浪、潮位以及生物化学信息。波浪观测系统是与国家气象局合作建立的,参数有:有效波高、波高最大值、波峰周期、平均波高、平均波周期、波扩展、温度、平均水位、风向和风速等。CEFAS系统具有以下特点:①高时间空间分频率取样;②物理、化学和生物多参数测量; ③智能化保真取样;④现场校正;⑤卫星通信;⑥可根据客户需要制定监测项目。 二、希腊的爱琴海监测和预报系统 该系统于1997年由希腊国家立项建设,欧洲自由贸易联盟(EFTA)资助了85%的经费,其余部分由希腊国家经济部
《海底电缆、管道路由调查、勘测简明规则》
海底电缆、管道路由调查、勘测简明规则 (国家海洋局1994年6月制定) 第一条为确保海底电缆、管道路由调查、勘测的科学性,提高海底电缆、管道工程的可靠性,合理利用海域,保护海洋资源,根据《铺设海底电缆管道管理规定》(以下简称《规定》),及《铺设海底电缆管道管理规定实施办法》(以下简称《实施办法》),制定本规则。 第二条本规则适用于在中华人民共和国内海、领海及大陆架上为铺设海底电缆、管道及为路由变化较大的海底电缆、管道改造工程而进行的海洋路由调查、勘测活动。 第三条海底电缆、管道路由调查、勘测工作应根据工程规模,选择有相应海洋工程勘察、设计资格等级的机构进行。 第四条路由(包括登陆点)预选 1.所有者经其上级业务主管部门审批同意后,可进行路由(包括登陆点)预选。 2.路由预选应掌握以下资料: (1)路由区自然环境及工程地质概况,包括海底地形、地貌、地质、海洋气象、海洋水文、海底稳定性等; (2)路由区现有海洋开发利用活动及海洋开发利用规划,包括渔业、交通、矿产、电力、邮电、市政、军事及其他开发活动和规划。 (3)路由区海底障碍物:自然障碍物如海底岩礁;人为障碍物如沉船,海洋工程及其废弃物等。 (4)其他必要资料。 3.根据路由区自然环境特征及海洋开发利用活动情况,提出调查路由,并初拟铺设方案,据此提出路由调查要求,编写技术规格书和路由调查方案。 第五条提交和审查《路由调查、勘测申请书》 1.所有者依照《规定》和《实施办法》的第五条,向主管机关提交《路由调查、勘测申请书》。 2.《路由调查、勘测申请书》应附具以下资料: (1)所有者上级业务主管部门批准该海底电缆、管道建设的文件; (2)调查、勘测路由的选择依据; (3)根据需要就调查、勘测路由适宜性征求其他有关部门意见的报告;
海洋石油平台种类
海洋石油平台种类 海洋平台是在海洋上进行作业,石油钻探与生产所需的平台,主要分钻井平台和生产平台两大类。在钻井平台上设钻井设备,在生产平台上设采油设备。平台与海底井口有立管相通。 呵呵,石油钻探就是民用啦,当然也可理解为战略物资储备。但多才的美军把雷达也放到半潜式平台上了。 咱们先把军用的放在一边,海洋平台就是石油开采业向水下进军的一个产物。最原始的海洋平台甚至不能称为海洋平台,而是湖泊平台(1891年,圣玛丽湖,俄亥俄州),结构为木质,作业水深甚至仅有1.5m。说白了,就是给陆上井架加了一层台阶。既然能在湖边,也能在海边嘛,到现在海洋平台已经发展成为高附加值、高科技的工业设施。形式多种多样,且几乎每种新型的平台形式出现都是为了再更深的海区中作业。 最早出现的平台是导管架平台(Jacket),适用于浅近海。导管架平台可以看作最原始,最直接的将钻井设备与海底连接起来的措施。钢桩穿过导管打入海底,并由若干根导管组合成导管架。导管架先在陆地预制好后,拖运到海上安装就位,然后顺着导管打桩,桩是打一节接一节的,最后在桩与导管之间的环形空隙里灌入水泥浆,使桩与导管连成一体固定于海底。平台设于导管架的顶部,高于作业区的波高,具体高度须视当地的海况而定,一般大约高出4-5m,这样可避免波浪的冲击。导管架平台的整体结构刚性大,适用于各种土质,是目前最主要的固定式平台。但其尺度、重量随水深增加而急骤增加,所以在深水中的经济性较差。
导管架平台使用水深一般小于300m,世界上大于300m水深的导管架平台仅7座。目前最大的导管架平台是在墨西哥湾安装的水深为610m的导管架平台。呵呵,看到下图,你是不是就想到一个字,“笨”? 典型导管架平台
海洋环境立体自动监测系统分析
龙源期刊网 https://www.360docs.net/doc/d66877422.html, 海洋环境立体自动监测系统分析 作者:黄维聪 来源:《科学家》2017年第11期 摘要海洋区域检测技术规划的主题“海洋环境中的立体自动监测系统技术与示范测试”(主题编号为818-01)作为我国863计划的重大课题,在相关的主管部门高层领导、责任专家等相互协调指导下,历经此项专题各个课题组主持单位与课题成员之间的共同努力下,已经完成有关此专题任务的研究,并且通过国家863计划联合专家组织验收。 关键词海洋环境;立体自动监测;检测系统 中图分类号 P7 文献标识码 A 文章编号 2095-6363(2017)11-0003-01 通过本课题的具体实施,也获得了具有知识产权较高的研究成果。国家海洋环境具备的立体自动监测技术与发达国家的先进技能之间存在的差距减少了10多年,已达到90年代中期先进的国际水平,为我国海洋环境检测技术的有效提高与建立国家整体辖区海域的海洋监测环境服务体系奠定稳固的基础。 1 系统的整体设计 海洋环境实施的立体自动化监测体系主要是按照我国现行的关于海洋环境监测的预告体系业务化运转的具体需要,通常都将其划分成延时与实时两个基本数据的过程;并依据处理数据的进程方式划分成4个过 程段。 1.1 监测采集数据的过程 由于处理数据的中心遥测监控单元所使用的是遥测、召测方式进行定时的对换监测单元现场的实时监测以前具备的相关数据,在历经初阶段预处理形成的时报产品记性明示、复印、之后再以文件的形式存档至原始的数据库当中。 1.2 处理数据的过程 对原始数据库当中取得的及时与不及时多元的监测数据,区别经过预处理、控制质量之后,产生示范区域基础性共享数据库与延长时间的数据库,当成制作信息的基本数据。同时还成型为用户可以查询的数据与资料量产品。 1.3 制作信息产品数据的过程
立管知识
1.井架上双立管(两个高度)--双立管,一个是备用(一个高度适用于顶驱钻 井,一个高度适应于转盘钻井,高的适应于顶驱,低的适应于转盘),立管接头的位置是处在顶驱水龙带接头或水龙头水龙带接口极限位置的中间位置(极限位置与井架安全空间和下降的最大距离有关系),每个立管接头处有一个立管操作台(供拆装水龙带的操作平台-),立管的位置一般布置在远离司钻室的井架侧。(属于高压泥浆系统) 水龙带长度的确定?-- 2.三缸泵配备灌注泵的必要性三缸泵特殊的结构和较高的冲次,影响了其吸入 性能及泵阀的正常工作。大量的试验和井场实践证明,用灌注泵来提高三缸泵吸入管中的压头,是改善三缸泵的吸入性能,充分发挥三缸泵效能的行之有效的办法。一台与三缸泵匹配合理、排量足够的灌注泵可通过供给三缸泵额外的吸入压力而取得下列较好的效果:1.可以消除三缸泵的敲击现象。2.在保证工作安全的前提下,大大提高了三缸吸入能力 3.陆地钻机台面和海洋平台台面管汇安装位置的不同— a,立管管汇—与顶驱和水龙头的鹅颈管位置有关系,应在同一侧,且在钻井过程水龙带不与其他结构或者设备干涉,不能影响井口操作。是高压管汇,泥浆泵泵出的泥浆通过立管管汇从钻杆内部送入井内,使得井内泥浆保持一定的压力。 b,节流压井管汇—压井管汇:当井口压力升高时,可通过压井管汇向井内泵入重钻井液以平衡井底压力,防止井涌和井喷的发生,可利用它所连接的放喷管线进行直接放喷,释放井底压力,也可以用来挤水泥固井作业及向井内注入清水和灭火剂。通过压井管汇单流阀,压井液或其他流体只能向井内注入,而不能回流以达到压井和其他作业的目的,一端与防喷器四通相连,另一端与注入泵相连。 c,固井管汇----
海洋低空无人机监测系统
UAV Low Altitude Marine Monitoring System Jie-liang Huang, Wen-yu Cai School of Electronics & Information Hangzhou Dianzi University Hangzhou, China E-mail: jieliang_huang@https://www.360docs.net/doc/d66877422.html,, caiwy@https://www.360docs.net/doc/d66877422.html, Abstract—As the human pays more and more attention to the exploration of marine resources, the marine activities show diversity. At the aspect of the exploration of some uncharted and potentially dangerous waters or islands, the marine low altitude surveillance UAV (unmanned aerial vehicle) is obviously very important. As a tool to obtain first-hand information, UAV can take off near the monitored area. Carrying with a high-definition camera, altimeter, GPS, barometric pressure and humidity sensors, the UAV can monitor the area for real-time, get the latitude and longitude of specific landmarks, measure altitude and barometric pressure and humidity and etc. Therefore we can have a general understanding of the whole area to eliminate risk factors. In addition, for different application environments, UAV can be equipped with different monitoring devices, which makes the application for more flexible and the areas for more diversity. Keywords-low altitude; UAV; high-definition cameras; altimeters; GPS; barometric pressure and humidity sensor I.I NTRODUCTION With the national marine economy being proposed, the low-altitude UAV remote sensing is applied to marine monitoring and monitors marine emergencies, marine disasters, marine environment dynamically with real-time tracking, to provide real-time field data for the marine forecasters for Rapid Alert and a scientific basis of decisions and solution for the marine management. Regardless of the protection of the marine disaster prevention and mitigation services and the need for the development of national high- tech, it is urgent to develop the real-time monitoring system of the marine environment with quick response and intensification and establish the report of efficient disaster warning service on the basis of new technology. Low-altitude UAV remote sensing marine monitoring as an monitoring technology of important and in the initial stage, on one hand, can do emergency response, without waiting for satellite transit or the limit of flying height of traditional aviation Airborne remote sensing; On the other hand, can overcome the defects of the optical remote sensing technology of traditional satellite in South cloudy and rainy weather and will greatly enhance the ability of monitoring Marine dynamically and urgently monitoring of disaster prevention and maneuver reduction, which provides quality services to the marine disaster prevention and mitigation, then escorts for the economic development of regional marine. This article will focus on UAV low altitude marine monitoring system with Art-tech Diamond 2500 Glider unmanned marine as the hardware platform, then describe the consist, the key technology and its applications of system. II.T HE C OMPOSITION OF S YSTEM UAV low-altitude Marine monitoring system consists of ground flight control system, aerial surveillance flight system, UAV driving flying platform, wireless HD video transmission system and so on. A.Ground Flight Control System Ground flight control systems is useful for the flight control of UAV and the processing and display of related data, including data transceiver module, debug interface, gesture controller(as shown in Fig.1). By the composition of wireless module, JTAG interface, the control handle, STM32 controller, PC terminal, it can be achieved on the UAV attitude, altitude, speed, heading, route control, with remote control and autonomous flight modes. In order to improve the reliability of the flight control system, the system uses the wireless transceiver module with a high transmission rate and low error rate to ensure that the control signals can be transmitted in real -time and received correctly. Because digital connection being instead of analog, which improves the accuracy of signal transmission and increases the anti-jamming capability. The body has the ability to be extended and flexible configuration, and some typical system components may be changed according to the needs of the missions. Figure 1. Ground flight control system. B.Aerial Surveillance Flight System Aerial surveillance flight system is response to the control signal of ground flight control system. It adjusts the flight of the UAV in real-time and collects relevant data information by a variety of sensors, which includes three parts of sensors, actuators and flight controller (as shown in Fig.2). By the composition of GPS module, battery voltage detection module, altimeter, barometer and humidity detection module, wireless module, attitude acquisition module, STM32 controllers, actuators, it can measure the location latitude and longitude, altitude, barometric pressure and humidity, life 2014 International Conference on Wireless Communication and Sensor Network