基于PLC的锅炉温度模糊控制研究与应用

技术创新
中文核心期刊《微计算机信息》(嵌入式与SOC)2008年第24卷第9-2期人工智能
基于PLC的锅炉温度模糊控制研究与应用
TheResearchandApplicationofBoilerFuzzyTemperatureControlSystembasedonPLC
(南京信息工程大学)林屹张颖超
LINYiZHANGYing-chao
摘要:采用SIMATICS7-300系列PLC设计了一个电加热锅炉的温度模糊控制器,该模糊控制器克服了传统PID控制对被控对象精确数学模型的依赖,通过已编制好的控制程序直接实现智能控制,充分体现出PLC编程方便、组态灵活、适应性好的特点。关键词:PLC;模糊控制器;温度控制
中图分类号:TP273.5文献标识码:A
Abstract:AkindofboilerfuzzytemperaturecontrollerwasdesignedbyadoptingSIMATICS7-300seriesPLC.ThisfuzzycontrollerovercametheweaknessoftraditionalPIDcontrollerwhichwasbasedontheaccuratemathematicmodelanditcanrealizetheintelli-gentcontrolbythecontrolprogramme,whichrepresentitsadvantagessuchasprogrammingconvenient,consignmentflexibleandgoodadaptability.
Keywords:PLC;Fuzzycontroller;temperaturecontrol
文章编号:1008-0570(2008)09-2-0216-02
林屹:硕士讲师
基金项目:江苏省高校自然科学基金资助项目:基于关系型数
据库的模糊查询方法研究与控制接口设计,颁发部门:江苏省
教育厅(06KJD520122)南京信息工程大学科研基金资助项目
1引言
在锅炉温度控制系统中,电加热锅炉是过程工业中常用的
设备,其温度控制也是过程控制的一个重点。然而,电加热锅炉
因其具有大时滞、非线性、难以建立精确数学模型等特点,采用
常规PID控制难以达到很好的控制效果。模糊控制是以模糊集
合论、模糊语言变量及模糊推理为基础的计算机智能控制,其
核心是模糊控制器。作为智能控制的一个分支,模糊控制对于
具有大时滞、非线性、参数强耦合等系统具有其明显的控制优
势,它不需要考虑被控对象的数学模型,只要依据由操作人员
经验而制定的控制规则进行控制。针对电加热锅炉具有大时
滞、非线性、难以建立精确的数学模型等特点,本文在研究模糊
控制理论的基础上,以电加热锅炉温度控制子系统为研究对
象,采用西门子公司的SIMATICS7-300系列PLC,进行模糊控
制算法的研究及应用。
2模糊控制系统结构
模糊控制是以模糊集合论、模糊语言变量及模糊推理为基
础的计算机智能控制,其核心是模糊控制器。锅炉温度模糊控
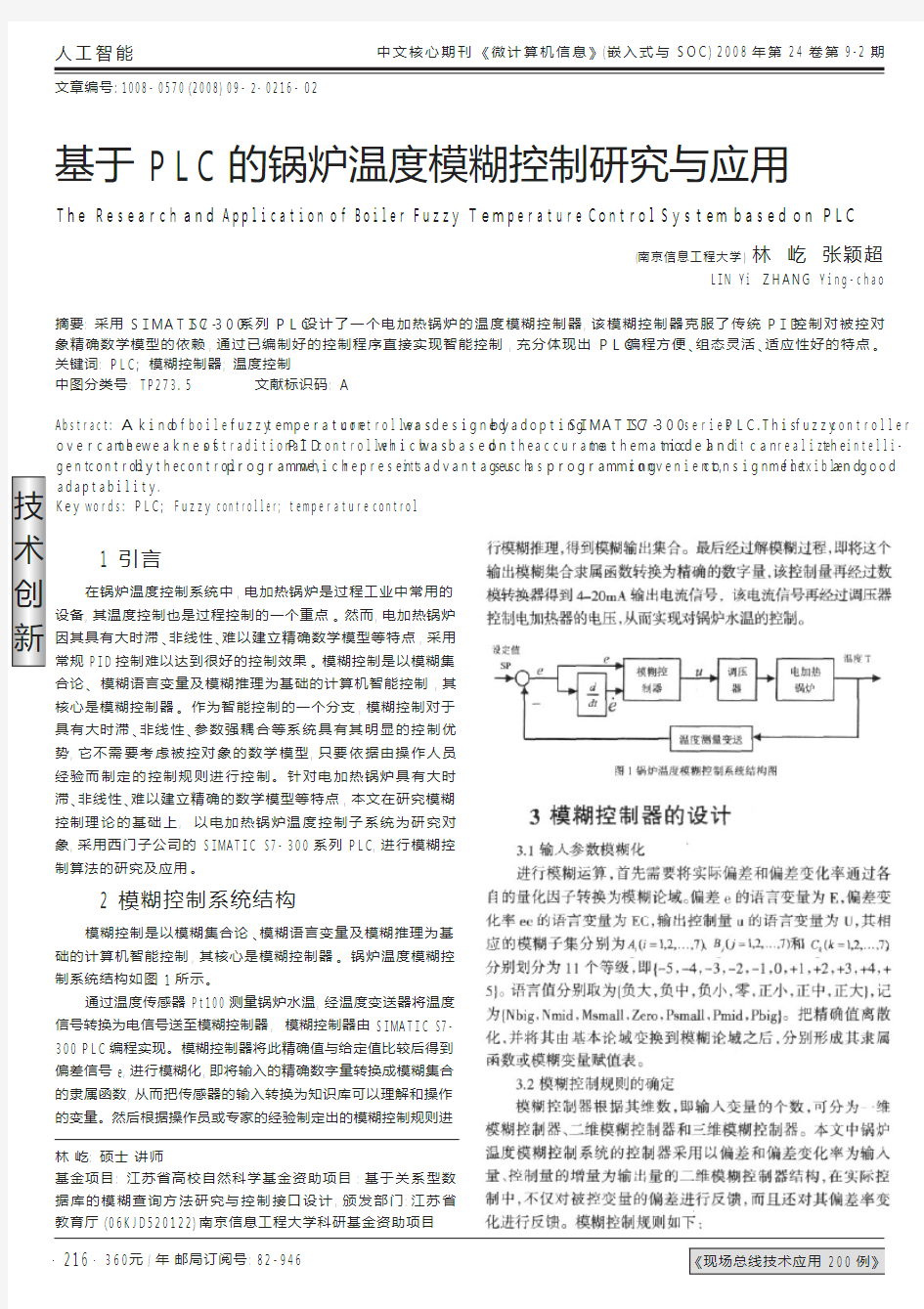
制系统结构如图1所示。
通过温度传感器Pt100测量锅炉水温,经温度变送器将温度
信号转换为电信号送至模糊控制器,模糊控制器由SIMATICS7-
300PLC编程实现。模糊控制器将此精确值与给定值比较后得到
偏差信号e,进行模糊化,即将输入的精确数字量转换成模糊集合
的隶属函数,从而把传感器的输入转换为知识库可以理解和操作
的变量。然后根据操作员或专家的经验制定出的模糊控制规则进
行模糊推理,得到模糊输出集合。最后经过解模糊过程,即将这个
输出模糊集合隶属函数转换为精确的数字量,该控制量再经过数
模转换器得到4-20mA输出电流信号,该电流信号再经过调压器
控制电加热器的电压,从而实现对锅炉水温的控制。
3模糊控制器的设计
3.1输入参数模糊化
进行模糊运算,首先需要将实际偏差和偏差变化率通过各
自的量化因子转换为模糊论域。偏差e的语言变量为E,偏差变
化率ec的语言变量为EC,输出控制量u的语言变量为U,其相
应的模糊子集分别为、和,
分别划分为11个等级,即{-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+
5}。语言值分别取为{负大,负中,负小,零,正小,正中,正大},记
为{Nbig,Nmid,Msmall,Zero,Psmall,Pmid,Pbig}。把精确值离散
化,并将其由基本论域变换到模糊论域之后,分别形成其隶属
函数或模糊变量赋值表。
3.2模糊控制规则的确定
模糊控制器根据其维数,即输入变量的个数,可分为一维
模糊控制器、二维模糊控制器和三维模糊控制器。本文中锅炉
温度模糊控制系统的控制器采用以偏差和偏差变化率为输入
量、控制量的增量为输出量的二维模糊控制器结构,在实际控
制中,不仅对被控变量的偏差进行反馈,而且还对其偏差率变
化进行反馈。模糊控制规则如下:
技
术
创新
如果偏差是“正大(Pbig)”,即温度很高,并且偏差变化率是“正大(Pbig)”,即温度正在不断增大,那么控制量迅速减小(Nbig),即迅速减少加热。
如果偏差是“正大(Pbig)”,即温度很高,并且偏差变化率是“负小(Nsmall)”,即温度正在缓慢减小,那么控制量适当减小(Nmid),即适当减少加热。
如果偏差是“负大(Nbig)”,即温度很低,并且偏差变化率是“负大(Nbig)”,即温度很快下降,那么控制量迅速增加(Pbig),即快速加热。
……
依次类推,可得到模糊控制规则表,如表1所示。
表1模糊控制规则表
3.3模糊推理及解模糊
根据确定的模糊控制规则表,运用模糊数学理论对模糊控制规则进行计算推理,得到一个定性的用语言表示的决策输出量。将模糊输出量的量值从内部论域转化为相应的实际论域,从模糊推理结果中产生精确的输出控制量。通过查询将当前时刻模糊控制器的输入量(偏差及偏差的变化量)所对应的控制输出值作为模糊控制器的最终输出,从而达到快速、
实时控制。4模糊控制器的软件设计
首先在STEP7软件中对系统进行硬件组态,然后对PLC进行用户程序的编写。锅炉温度模糊控制程序流程图如图2所示。
糊控制器采用二维结构,即通过温度传感器采样到被控变量锅炉水温的精确值,将此精确值与给定值比较后得到偏差信号e以及偏差的变化率ec,将其经过模数转换器转换成精确的数字量送至模糊控制器。
所以通过在主程序OB1中调用中断组织块OB35来进行每隔20ms的偏差信号e及偏差的变化率ec的采样。计算关系如下:
其中,T(k)为测量值,SP值为锅炉温度的设定值,20ms为采样时间,可在硬件组态时设定。根据上述计算关系,建立数据块DB3,将测量值AI0、设定值SP、偏差E_K,E_K_1,以及偏差变化率存放于DB3数据块中。
在锅炉温度模糊控制系统中,温度传感器Pt100测量锅炉水温,经温度变送器将0~100的温度信号转换为4~20mA的电信号被模拟量输入输出模块SM334采集,其数据范围是5530~27648。首先通过编写功能FC201把5530~27648的数据转换成更符合控制习惯的0~100的数据。然后,采用逐项比较法的方法,调
用FC1对采样得到的温度偏差e以及偏差的变化率ec进行模糊化。在FC2中建立模糊查询表,通过调用FC2进行模糊推理。
解模糊过程,即将通过模糊控制表查询得到的输出量的
模糊值U转换为精确的数字量u。
查询模糊控制得到的模糊输出量U为0~10的双整型数据,首先需要将其转换为实型数据,然后通过编写的数据转换功能FC3,将输出量转换成范围为5530~27648的数据,其经过数模转换器,转换为4~20mA的电流信号送到执行机构调压器,调压器的输出控制
电加热器的端电压,从而实现对电加热锅炉水温的控制。
用户程序编写完成之后,将其通过MPI电缆下载到
PLC中运行。
监控界面的设计与实现在组态王软件中进行。通过设备连接、数据词典的编写以及画面的建立,运行组态王,即可进入该锅炉温度模糊控制系统的监控环境。锅炉温度的设定值以及实时测量值在该监控界面中得以实时显示。该锅炉温度模糊控制系统某段时间内的实时曲线如图3所示。图中可以观测到温度测量值跟踪设定值变化的运行情况。
5结束语
模糊控制是以模糊集合论
、模糊语言变量及模糊推理为基础的计算机智能控制。本文的创新之处在于在研究模糊控制理论的基础上,以电加热锅炉为研究对象,详细介绍采用SIMAT-
ICS7-300系列PLC进行二维模糊控制器的设计及实现方法,
(下转第213页)
技术创新
图4程序流程图
参考文献
[1](加拿大)R.MohanMathur,(印度)RajivK.Varma著.马思尔,瓦马,徐政译.基于晶闸管的柔性交流输电控制装置.机械工业出版社,2005
[2]苏奎峰,吕强,耿庆峰,陈圣俭.TMS320F2812原理与开发/DSP应用丛书.电子工业出版社,2005
[3]陈奇.模糊控制TSC无功补偿控制器设计.电力电子技术.2005,(4)[4]曾光,苏彦民,柯树敏,张静刚.用于无功静补系统的模糊-PID控制方法.电工技术学报.2006,(6)
[5]海涛,徐嫣,骆武宁,
高翔,文志刚.基于模糊控制的电容器投切控制算法.广西大学学报(自然科学版).2005,(3)
[6]许胜,黄锦安,李雪.一种基于DSP的动态无功补偿装置.电力电子技术.2006,(2)
[7]侯勇严,郭文强.一种模糊PID控制器的设计方法研究.陕西科技大学学报.2005,(4)
[8]司栋森,
李增智,午胜芬,贾运红.基于双DSP的高压无功补偿装置设计与实现.微计算机信息,2006,7-2:176-179。作者简介:肖长河,男,1976-,湖南大学硕士研究生,研究方向为:电气工程及其自动化;向阳,男,湖南大学副教授,硕士生导师;何怡刚,男,1966-,
湖南大学教授、博士生导师,主持完成了863、
国家自然科学基金等26项课题的研究Biography:XIAOChang-he(1976-),Man(Hanzu),GraduatestudentofHunanUniversity,Engineeringarea:ElectricPowerandElectronTechnology;Heyigang(1966-),Prof.,SupervisorofPh.D,Man(Hanzu),Work:TestingTechnologyofCircuits&Systems.
(410082湖南大学电气与信息工程学院)肖长河向阳何怡刚
谢雁鹰齐绍忠
(Electrical&Information
EngineeringInstitute,Hunan
University,410082,China)XIAOChang-heXIANGYangHEYi-gangXIEYan-yingQiShao-zhong
通讯地址:(410082湖南大学14舍225寝室)肖长河
(收稿日期:2008.08.23)(修稿日期:2008.10.05)
(上接第217页)
通过已编制好的控制程序直接实现电加热锅炉温度的智能控制,充分体现出PLC编程方便、组态灵活、适应性好的特点。该模糊控制策略较常规PID控制策略的明显优势在于,在锅炉温度的控制过程中,不再依赖于监控人员进行的精确的P、I、D参数的实时调节,而是直接通过已编制好的控制程序直接实现控制,对于像电加热锅炉这样的具有大时滞、
非线性、难以建立精确的数学模型的被控对象,模糊控制有较好的控制优势。
参考文献
[1]寇振中.模糊控制技术及其应用.北京:
北京航空航天大学出版社,1995
[2]韩峻峰,李玉惠等.模糊控制技术.重庆:重庆大学出版社,2003
[3]严盈富.基于PLC和组态软件的包衣系统研究.微计算机信息,2006,11-1:67 ̄69
[4]张雪平,
王志斌.基于模糊控制的PLC在温度控制中的应用.电气传动,2005,35(8):54 ̄55
作者简介:林屹,女,1977年生,硕士,讲师,主要从事计算机控制的教学与研究。张颖超,男,1960年生,教授,主要研究方向:工业控制与应用等。
Biography:LINYi(1977-),Female,Master,Lecturer,Main-lyforteachingandresearchoncontrolwithcomputer.
(210044南京信息工程大学信息与控制学院江苏南京)林屹(CollegeofInformationandControl,NanjingUniversityofInformationScience&Technology,Nanjing210044,China)LINYi
通讯地址:(210044南京信息工程大学信息与控制学院江苏
南京)林屹
(收稿日期:2008.08.23)(修稿日期:2008.09.05)
(上接第246页)
[2]郑启忠.2.4GHz无线数字音频芯片nRF24Z1及其应用国电子网.2005..21IC中作者简介:刘云飞(1983-),男,汉族,山东高密人,硕士研究生,主要从事电子与通信技术方面的研究。熊建设(1966-),男,汉
族,硕士生导师,副教授,主要从事视频会议系统与多媒体通信方面的研究。高翔(1972-),男,汉族,山东烟台人,硕士研究生,研究方向为计算机网络与通信。王曦(1980-),男,汉族,山东青岛人,硕士研究生,研究方向为计算机网络与多媒体通信。
Biography:LIUYun-fei(1983-),male,theHannationality,GaomiofShandongProvince,Mastercandidate,majoredinElectronicandcommunicationtechnologies.
(266100山东青岛中国海洋大学信息学院电子系)刘云飞(OceanUniversityofChina,InformationCollege,ElectronicDepartment,Qingdao,Shandong,266100)LIUYun-fei
通讯地址:(266100山东省青岛市崂山区松岭路238号中国海洋大学信息学院电子系05级研究生)刘云飞
(收稿日期:2008.08.23)(修稿日期:2008.09.05)
温度模糊控制实验
温度模糊控制实验(选学) 一、实验目的 1.认识Labview 虚拟仪器在测控电路的应用; 2.通过实验,改变P 的参数,观察对整个温度测控系统的影响; 3.进一步认识固态继电器和温度变送器,了解其工作原理; 4.了解什么是模糊控制理论。 二、预习要点 1.了解模糊控制理论的由来及应用; 2.Labview 虚拟仪器图形软件(本实验指导书附录中对使用环境详细介绍)。 三、实验原理 温度还是通过固态继电器的导通关断来实现加热过程的,控制周期即是一个 加热和冷却周期,PID 调节的实现也是通过这个周期实现的,在远离温度预设值 的时固态继电器在温度控制周期中持续加热(假设导通时间是T),在接近温度 预设值时通过PID 得到的值来控制这一周期内固态继电器的开关时间(假设导通 时间是1/2T)维持温度(假设导通时间是1/4T)。 本实验暂时用的是模糊控制原理中的的比例控制钟摆无限接近的控制理论, 所以温度预设值不能超过(最大温度+实验开始前温度)/2,例如实验开始前温度为25 度,最大为100 度,那么预设最大为62.5 度,当然这样可能几天温度才能被控制好,所以建议温度不超过实验开始温度5 度,同时我们在将来的升级中 会用更好的模糊理论代替现有的较差的控制理论,这里还要指出好的模糊控制理 论在一定程度上比好的PID 控制还要稳定,做的好的模糊控制是经验与理论的最 完美结合。 四、实验项目 用模糊PID 控制水箱温度。 五、实验仪器 ZCK-II 型智能化测控系统。
六、实验步骤及操作说明 1.打开仪器面板上的总电源开关,绿色指示灯亮起表示系统正常; 2.打开仪器面板上的液位电源开关,绿色指示灯亮起表示系统正常; 3,确保贮水箱内有足够的水,参照图2(图见第三章)中阀门位置设置阀门开关,将阀门1、3、5、6 打开,阀门2、4 关闭; 4.参看变频器操作说明书将其设置在手动操作挡; 5.单击控制器RUN 按钮,向加热水箱注水,直到水位接近加热水箱顶部,完全 淹没加热器后单击STOP 按钮结束注水; 6.关闭仪器面板上的液位电源开关,红色指示灯亮起表示系统关闭; 7.打开仪器面板上的加热电源开关,绿色指示灯亮起表示系统正常; 8.打开计算机,启动ZCK-II 型智能化测控系统主程序; 12 9.用鼠标单击温度控制动画图形进入温度控制系统主界面,小组实验无须在个人信息输入框填写身份,直接确定即可; 10.在温度系统控制主界面中,单击采集卡测试图标,进入数据采集卡测试程序。 一切设置确认无误后即可单击启动程序图标,观察温度和电压的变化,也可以单 击冷却中左边的开关按钮进入加热程序,观察温度上升曲线及电流表和电压表变 化,确认传感器正常工作后点击程序结束,等待返回主界面图标出现即可返回温 度控制主界面进入下一步实验。 11.在温度系统控制主界面中,单击传感器标定图标,进入传感器标定程序。本 程序界面基本和数据采集卡测试程序界面基本相同,操作请参照步骤10 进行,一切设置确认无误后即可单击启动程序图标,观察温度和电压的变化,同时用温 度计测量加热箱内水温,并用传感器标定控制图标完成精确标定。标定完成后加 热水箱到30 摄氏左右时程序结束,等待返回主界面图标出现即可返回温度控制主界面进入下一步实验; 12.在温度系统控制主界面中,单击模糊PID 系统图标,进入模糊PID 温度控制系统程序。点击控制参数图标,进入控制参数设定界面,按照参数表4 中的小 组1 给定的预设参数填写。确定返回后点击采集参数图标按照参数表4 中的小组
组态王课程设计锅炉温度控制系统
锅炉温度控制系统上位机设计 1.设计背景 锅炉是化工、炼油、发电等工业生产过程中必不可少的重要的动力设备。它所产生的高压蒸汽,既可以作为风机、压缩机、大型泵类的驱动透平的动力源,又可作为蒸馏、化学反应、干燥和蒸发等过程的热源。随着工业生产规模的不断扩大,生产设备的不断创新,作为全厂动力和热源的锅炉,办向着大容量、高参数、高效率发展。为了确保安全,稳定生产,锅炉设备的控制系统就显得愈加重要。随着经济的迅猛发展,自动化控制水平越来越高,用户对锅炉控制系统的工作效率要求也越来越高,为了提高锅炉的工作效率,较少对环境的污染问题,所以利用计算机与组态软件技术对锅炉生产过程进行自动控制有着重要的意义。 2.任务要求 (1) 按照题目设计监控画面及动态模拟; (2) 在数据字典中定义需要的内存变量和I/O变量; (3) 实现监控系统的实时、历史曲线及报警界面显示; (4) 实现保存数据和参数报表打印功能; (5) 实现登陆界面和帮助界面。 3. 界面功能 3.1 系统说明 本系统的目的是实现锅炉的温度控制,所以在监控界面设置了加热部分和降温部分,同时通过观察相应仪表,操作者手动的实现对锅炉温度的控制,而且在加热过程和降温过程中有信号灯可以清楚地显示系统工作在什么阶段。此外,在监控界面加入了液位控制部分,通过对进水量和出水量的控制实现液位平衡。实时曲线和历史曲线可以让操作者清楚地观察到锅炉内液体的液位高度和温度,从而更加准确的操作系统,达到控制要求。实时报警界面可以随时进行提醒,防止发生意外情况。帮助界面可以让初次登陆该系统的用户快速学会如何操作系统。登陆界面中加入用户登陆部分,只有有相应权限的操作者也可以控制系统。该系统还加入历史曲线打印功能和对系统相关变量的保存功能,用户可以随时查看历史记录。 3.2主监控界面 主控界面实现的是操作者观察仪表,得到锅炉内液体温度和液位的实时信息,通过调节电磁阀1、2,使得锅炉内液体液位保持在要求范围内,通过加热按钮和降温按钮对
51单片机的热水锅炉温度控制系统设计
0 基于单片机热 水锅炉炉温控制系统设计
东北大学秦皇岛分校基于单片机的热水锅炉温度控制系统设计dennis 基于单片机热水锅炉炉温控制系统设计 作者:陈明 单位:东北大学秦皇岛 【摘要】本系统是基于单片机的锅炉温度控制,在设计中主要有温度检测、按键控制、水温控制、循环控制、显示部分、故障报警等几部分组成来实现温度控制。主要用数字温度传感器DS18B20来检测水温,用五个控制按键来实现按健控制,用液晶显示屏LCD1602来完成显示部分。并且通过模数转换把这些信号送入单片机中。把这些信号与单片机中内部设定的值相比,以判断单片机是否需要进行相应的操作,即是否需要打开或者关闭温度加热的操作,从而实现单片机自动控制的目的。本设计用单片机控制易于实现锅炉供暖、而且有造价低、程序易于调试、一部分出现故障不会影响其他部分的工作、维修方便。 【关键词】单片机(AT89C51),传感器DS18B20,扬声器,继电器 引言 自从20世纪90年代以来,单片机已经进入了一个高速发展的阶段,世界上著名的半导体厂商都注重新型单片机的研制、生产和推广。单片机的应用已经深入到来各个国家的国民经济当中。例如国内外目前知名的企业:atmel公司的avr单片机,motorola单片机,MICROCHIP单片机,东芝单片机,intel的8051单片机,宏晶STC单片机等等。 温度自动控制系统主要是有温度采集系统、液晶显示系统、扬声器报警系统和继电器控制系统四部分组成。本次设计主要是以温度采集到的温度为参考。如果温度在设定值内部,则系统正常工作,本系统的温度正常范围为0-50摄氏度,如果超出温度范围,则系统发出警报并控制系统负载停止工作。温度控制系统的编程软件为keil,仿真软件为proteus。 1. 热水锅炉温度控制系统设计 1.1方案极其论证 方案一: 用PLC做主要的设计技术,通过用其中的相关部件的开关控制达到锅炉水温的控制目的。但是由于对PLC相关配套的设备和仿真软件的限制,因此放弃了PLC方案。
模糊控制详细讲解实例
一、速度控制算法: 首先定义速度偏差-50 km/h ≤e (k )≤50km/h ,-20≤ec (i )= e (k )- e (k-1)≤20,阀值e swith =10km/h 设计思想:油门控制采用增量式PID 控制算法,刹车控制采用模糊控制算法,最后通过选择规则进行选择控制量输入。 选择规则: e (k )<0 ① e (k )>- e swith and throttlr_1≠0 选择油门控制 ② 否则:先将油门控制量置0,再选择刹车控制 0 4模糊控制器的设计 4 Design of Fuzzy Controllor 4.1概述(Introduction) 随着PLC在自动控制领域内的广泛应用及被控对象的日趋复杂化,PLC控制软件的开发单纯依靠工程人员的经验显然是行不通的,而必须要有科学、有效的软件开发方法作为指导。因此,结合PLC可编程逻辑控制器的特点,应用最新控制理论、技术和方法,是进一步提高PLC软件开发效率及质量的重要途径。 系统设计的目标之一就是要提高装车的均匀性,车厢中煤位的高度变化直接影响装车的均匀性,装车不均匀对车轴有很大的隐患。要保持高度值不变就必须不断的调整溜槽的角度,但是,在装车过程中,煤位的高度和溜槽角度之间无法建立精确的数学模型。模糊控制它最大的特点是[43-45]:不需建立控制对象精确数学模型,只需要将操作人员的经验总结描述成计算机语言即可,因此采用模糊控制思想实现均匀装车是行之有效的方法。虽然很多PLC生产厂家推出FZ模糊推理模块,但这些专用模块价格昂贵,需使用专门的编程设备,成本高通用性差,所以自主开发基于模糊控制理论的PLC控制器有很大的工程价值。 本章首先介绍了模糊控制的基本原理、模糊控制系统及模糊控制器的设计步骤;然后在对煤位高度控制系统分析的基础上,设计基于模糊理论的PLC控制,分别从查询表计算生成和PLC程序查询两个部分进行设计。 4.2模糊控制原理(Fuzzy Control Principle) 4.2.1模糊控制理论(Fuzzy Control Theory) 模糊控制理论是由美国加利福尼亚大学的自动控制理论专家L.A.Zadch教授首次提出,由英国的Mamdani首次用于工业控制的一种智能控制技术[46]。模糊控制(FUZZY)技术是一种由数学模型、计算机、人工智能、知识工程等多门科学领域相互渗透、理论性很强的科学技术。 模糊控制是以人的控制经验作为控制的知识模型,以模糊集合、模糊语言变量以及模糊逻辑推理作为控制算法的数学工具,用计算机来实现的一中计算机智能控制[47-48]。它的基本思想是:把人类专家对待特定的被控对象或过程的控制策略总结成一系列以“IF…THEN…”形式表示的控制规则,通过模糊推理得到控制作用集,作用与被控对象或过程。与传统的控制方法相比,它具有以下优点[48]:无需知道被控对象的数学模型;是一种反映人类智慧思维的智能控制;易被人们所接受;构造容易;鲁棒性好。 目录 第一章摘要 0 1.1设计任务 0 1.2关键词 (1) 第二章温度模糊控制系统 (1) 2.1温度控制系统 (1) 2.2模糊控制 (1) 2.2.1模糊控制的用途 (1) 2.2.2 模糊控制的概述 (2) 2.2.3 模糊控制的基本原理 (3) 2.2.4模糊控制的基本组成 (4) 第三章单回路控制系统 (5) 3.1系统总体设计方案 (5) 3.1.1工艺流程图 (5) 3.1.2方框图工作流程介绍 (5) 3.2硬件设计和器件选择 (6) 3.2.1电气接线图 (6) 3.2.2器件选择 (6) 第四章控制算法选择及参数整定 (7) 4.1 控制算法选择 (7) 4.2 参数整定 (7) 4.2.1 凑试法 (8) 4.2.2 临界比例法 (8) 4.2.3经验法 (8) 4.3 MATLAB仿真 (9) 第五章系统软件设计 (11) 5.1控制器介绍 (11) 5.2控制器面板说明 (12) 5.3调节器参数设置: (12) 第六章心得体会 (13) 第七章参考文献 (13) 第一章摘要 1.1设计任务 本课程设计的任务是设计一个温度模糊控制系统;确定设计方案,选择检测变送器、控制器、执行器,确定控制器算法,并进行参数整定,以提高综合运用有关专业知识的能力 和实际动手能力。 1.设计组成单回路控制系统的各部分,画出总体框图; 2.能根据单回路温度定值控制系统的特点,确定控制方案; 3.根据所确定的设计方案进行仪表选择、控制器选择、执行器选择; 4.合理设计模糊控制器。 5.系统仿真运行 1.2关键词 关键词:温度控制,模糊控制,单回路控制系统 第二章温度模糊控制系统 2.1温度控制系统 温度控制系统广泛应用于社会生活的各个领域 ,如家电、汽车、材料、电力电子等 ,常用的控制电路根据应用场合和所要求的性能指标有所不同 , 在工业企业中,如何提高温度控制对象的运行性能一直以来都是控制人员和现场技术人员努力解决的问题。这类控制对象惯性大,滞后现象严重,存在很多不确定的因素,难以建立精确的数学模型,从而导致控制系统性能不佳,甚至出现控制不稳定、失控现象。传统的继电器调温电路简单实用 ,但由于继电器动作频繁 ,可能会因触点不良而影响正常工作。控制领域还大量采用传统的PID控制方式,但PID控制对象的模型难以建立,并且当扰动因素不明确时,参数调整不便仍是普遍存在的问题。而采用数字温度传感器DS18B20,因其内部集成了A/D转换器,使得电路结构更加简单,而且减少了温度测量转换时的精度损失,使得测量温度更加精确。数字温度传感器DS18B20只用一个引脚即可与单片机进行通信,大大减少了接线的麻烦,使得单片机更加具有扩展性。由于DS18B20芯片的小型化,更加可以通过单跳数据线就可以和主电路连接,故可以把数字温度传感器DS18B20做成探头,探入到狭小的地方,增加了实用性。更能串接多个数字温度传感器DS18B20进行范围的温度检测。 2.2模糊控制 2.2.1模糊控制的用途 自从电子计算机诞生以来,人们就希望计算机能具有智能并取代人进行智能活动。因此 锅炉内胆温度控制系统设计 一.引言 过程控制是自动化的重要分支,其应用范围覆盖石油、化工、制药、生物、医疗、水利、电力、冶金、轻工、建材、核能、环境等许多领域,在国民经济中占有极其重要的地位。无论是在现代复杂工业生产过程中还是在传统生产过程的技术改造中,过程控制技术对于提高劳动生产率、保证产品质量、改善劳动条件以及保护生态环境、优化技术经济指标等方面都起着非常重要的作用。 过程控制的主要任务是对生产过程中的有关参数(温度、压力、流量、物位、成分、湿度、PH值和物性等)进行控制,使其保持恒定或按一定规律变化,在保证产品质量和生产安全的前提下,是连续型生产过程自动的进行下去。实际的生产过程千变万化,要解决生产过程的各种控制问题必须采用有针对性的特殊方法与途径。这就是过程控制要研究和解决的问题。二.任务和要求 任务:设计锅炉内胆温度控制系统,选择合适的传感器、控制器和执行器,使其满足一定的控制要求。 要求:本系统的控制对象为锅炉内胆的水温,要求锅炉内胆的温度的稳定值等于给定值,误差保持在 5%的误差带以内。 三.总体方案 系统组成:本实验装置由被控对象和控制仪表两部分组成。系统动力支路分两路:一路由三相(380V交流)磁力驱动泵、电动调节阀、直流电磁阀、涡轮流量计及手动调节阀组成;另一路由日本三菱变频器、三相磁力驱动泵(220V变频)、涡轮流量计及手动调节阀组成。1.原理框图 图1 2.简要原理 单闭环锅炉水温定值控制系统的结构示意如课程设计指导书所示,图1为其结构框图。其中锅炉内胆为动态循环水,磁力泵、电动调节阀、锅炉内胆组成循环供水系统。而控制参数为锅炉内胆的水温,即要求锅炉内胆的水温等于设定值。先通过变频器-磁力泵动力支路给锅炉内胆打满水,然后关闭锅炉内胆的进水阀。待系统投入运行后,再打开锅炉内胆的进水阀,允许变频器-磁力泵以固定的小流量使锅炉内胆的水处于循环状态。在锅炉内胆水温的控制过程中,由于锅炉内胆由循环水,因此锅炉内胆循环水水温控制相比于内胆静态水温控制时更充分,因而控制速度有较大的改善。 在结构原理框图中可以清楚的看出,我们给定温度的设定值,将温度传感器的值与设定值相比较,把偏差值送入PID调节器,PID调节器的输出信号送入可控硅调压装置,经调压装置输出的电压信号来控制加热装置的阻值,从而控制锅炉内胆的水温。此控制系统为单闭环反馈系统,只要PID参数设置的合理,就能够使系统达到稳定。 3.优缺点分析 优点:单闭环系统结构简单,稳定性好、可靠性高,在工业控制中得到广泛的应用。 缺点:对动态特性复杂、存在多种扰动或扰动幅度很大,控制质量要求高的生产过程,简单控制系统难以满足要求 四.元器件的选择与参数整定 1.元器件的选择: (1)被控对象 由不诱钢储水箱、4.5千瓦电加热锅炉(由不锈钢锅炉内胆加温筒构成)、冷热水交换盘管和敷朔不锈钢管道组成。 模拟锅炉:本装置采用模拟锅炉进行温度实验,此锅炉采用不锈钢精制而成,设计巧妙。 管道:整个系统管道采用不诱钢管组成,所有的水阀采用优质球阀,彻底避免了管道系统生锈的可能性。有效提高了实验装置的使用年限。其中储水箱底有一个出水阀,当水箱需要更换水时,将球阀步打开直接将水排出。 (2)检测装置 变送器:采用工业用的扩散硅压力变送器,含不诱钢隔离膜片,同时采用信号隔离技术,对传感器温度漂移跟随补偿。 温度传感器:本装置采用六个Pt100传感器,分别用来检测上水箱出口、锅炉内胆、锅炉夹套以及盘管的水温。经过调节器的温度变送器,可将温度信号转换成4~20mA DC电流信 Based On Fuzzy Controler On MATLAB Simulink Simulation (基于模糊控制的matlab simulink仿真) Abstract—For improving the temperature control precision as the industry require. In this paper we introduce how to design Fuzzy controller in detail and how to model in MATLAB and use Fuzzy Toolbox and SIMULINK in MATLAB to realize the computer simulation of parameters control system. Using the algorithm of Fuzzy control in the system,the temperature was controlled in good state.At present,the system has been used in the phase of the application and the pilot of the resistance furnace temperature in the actual industrial,and satisfying results were achieved.Practice shows that Fuzzy control method improves the leal—time performance、stability and accuracy of controlling and makes the operation simplified.The use for reference of the method was obviously in industrial application.摘要:为提高工业上所需温度的控制精度,本文介绍如何设计模糊控制器,以及如何在具体的模型在MATLAB中,使用模糊工具箱和SIMULINK在MTLAB实现参数的计算机模拟控制系统。在该系统中,通过采用模糊控制算法对温度实现了很好的控制,并且该系统正处于实际工业电阻炉温度控制的应用和试行阶段,也达到了满意的控制效果。实践表明,模糊控制方法提高了控制的实时性稳定性和精确度,并且实现了操作过程的简化,对于工程实际应用具有较强的借鉴意义。 Keywords:Fuzzy Controler; MATLAB; SIMULINK;simulation; 关键词:模糊控制; SIMULINK;MATLAB;仿真 I.I NTRODUCTION (介绍系统) MATLAB / Simulink is a universal language of scientific computing and simulation, and the establishment of MATLAB, Simulink is a system block diagram and block diagram-based system-level simulation environment, the environment provides a number of specialized modules library: such as CDMA Reference Blockset, DSP (Digital Signal Processor) module library and so on. It is a dynamic system modeling, simulation and analysis of simulation results package has the following characteristics: (1) to invoke the preparation of the agent module to the module block diagram of the system is connected into, making the modeling and engineering simulation system block diagram of unified, more comprehensive research communication systems with high openness. (2) allows the user to freely modify the module parameters, and can seamlessly use all the analysis tool MATLAB with high interactivity. (3) simulation results can be almost "real time " to be displayed in graphical or data, which is the same laboratory. Fuzzy logic control, automation development and the future strategy, in which great attention has been paid, is an Intelligent Control Department. It uses linguistic rules and fuzzy sets for fuzzy reasoning. In order to solve complex systems, including nonlinearity, uncertainty and accurate mathematical model is difficult to establish the problem, fuzzy control technology to become widely used. Temperature, often using the traditional PID control algorithm is less obvious [1]: conditions change. Also will change the system parameters, PID parameters need to be adjusted, otherwise it would be worse dynamic characteristics, control accuracy decreased: the temperature deviation is large, prone to the phenomenon of integral saturation, resulting in control for too long and so on. in the same Time, fuzzy toolbox and SIMULINK in MATLAB to achieve the parameter control system computer simulation, to promote efficiency and system design [2] for accuracy. The whole system mainly by the AT89S51 microcontroller, temperature data acquisition circuit, the zero crossing detection and trigger circuit, keyboard and display circuit, memory circuit (CF card), sound and light alarm circuit, reset circuit and the corresponding control software of several parts. Block diagram of the system II.E ASE OF U SE(控制器设计) In theory, the higher dimension fuzzy controller, the control precision is higher. But the higher dimension, Control algorithm is also more difficult to achieve. Currently, the widely used two-dimensional fuzzy controller Nonlinear control law will help ensure system stability. Reduce the response process overshoot. Fuzzy controller includes fuzzification, fuzzy reasoning fuzzy three-part settlement. A. Fuzzy linguistic variables and membership functions to determine Fuzzy controller and dual-input, single output structure, the input linguistic variables as temperature, rate of change of error e and error e, the output variable duty cycle for the SCR-time changes in the amount of ¨. 模糊控制器的设计 一、 PID 控制器的设计 我们选定的被控对象的开环传递函数为3 27 ()(1)(3)G s s s = ++,采用经典 的PID 控制方法设计控制器时,由于被控对象为零型系统,因此我们必须加入积分环节保证其稳态误差为0。 首先,我们搭建simulink 模型,如图1。 图1simulink 仿真模型 由于不知道Kp ,Kd ,Ki ,的值的大致范围,我们采用signal constraints 模块进行自整定,输入要求的指标,找到一组Kp ,Kd ,Ki 的参数值,然后在其基础上根据经验进行调整。当选定Kp=2,Kd=0.95,Ki=0.8时,可以得到比较好的响应曲线。调节时间较短,同时超调量很小。响应曲线如图2所示。 图2 PID 控制响应曲线 将数据输出到工作空间,调节时间ts =2.04s ,超调量%0σ=。可以看出,PID 控制器的调节作用已经相当好。 二、 模糊控制器的设计 1、模糊控制器的结构为: 图3 模糊控制器的结构 2、控制参数模糊化 控制系统的输入为偏差e 和偏差的变化率ec ,输出为控制信号u 。首先对他们进行模糊化处理。 量化因子的计算max min ** max min x x k x x -= - 比例因子的计算**max min max min u u k u u -=- 其中,*max x ,* min x 为输入信号实际变化范围的最大最小值;max x ,min x 为输入信号论域的最大最小值。*max u ,* min u 为控制输出信号实际变化范围的最大最小 值,max u ,min u 输出信号论域的最大最小值。 相应的语言值为NB ,NM ,NS ,ZO ,PS ,PM ,PB 。分别表示负大、负中、负小、零、正小、正中、正大。 3、确定各模糊变量的隶属函数类型 语言值的隶属度函数就是语言值的语义规则,可分为连续式隶属度函数和离散化的隶属度函数。本系统论域进行了离散化处理,所以选用离散量化的隶属度函数。 课程设计任务书 题目: 锅炉过热蒸汽温度控制系统设计 摘要 本文是针对锅炉过热蒸汽温度控制系统进行的分析和设计。控制系统采用串级控制以提高系统的控制性能,在系统中采用了主控-串级控制的切换装置,使系统可以适用于不同的工作环境。通过使用该系统,可以使得锅炉过热器出口蒸汽温度在允许的范围内变化,并保护过热器营壁温度不超过允许的工作温度。 关键字:过热蒸汽控制串级控制系统自动控制主控-串级切换 目录 1 生产工艺介绍 .................................................. 错误!未定义书签。 1.1 锅炉设备介绍............................................................................ 3 1.2 蒸汽过热系统的控制................................................................ 52控制原理简介 ..................................................................................... 6 2.1控制方案选择............................................................................. 6 2.1.1单回路控制方案................................................................. 6 基于单片机的模糊温度控制器的设计 1 引言本文研究的被控对象为某生产过程中用到的恒温箱,按工艺要求需保持箱温100℃恒定不变。我们知道温度控制对象大多具有非线性、时变性、大滞后等特性, 采用常规的PID 控制很难做到参数间的优化组合, 以至使控制响应不能得到良好的动态效果。而模糊控制通过把专家的经验或手动操作人员长期积累的经验总结成的若干条规则,采用简便、快捷、灵活的手段来完成那些用经典和现代控制理论难以完成的自动化和智能化的目标, 但它也有一些需要进一步改进和提高的地方。模糊控制器本身消除系统稳态误差的性能比较差, 难以达到较高的控制精度, 尤其是在离散有限论域设计时更为明显, 并且对于那些时变的、非线性的复杂系统采用模糊控制时, 为了获得良好的控制效果, 必须要求模糊控制器具有较完善的控制规则。这些控制规则是人们对受控过程认识的模糊信息的归纳和操作经验的总结。然而, 由于被控过程的非线性、高阶次、时变性以及随机干扰等因素的影响, 造成模糊控制规则或者粗糙或者不够完善, 都会不同程度的影响控制效果。为了弥补其不足, 本文提出用自适应模糊控制技术,达到模糊控制规则在控制过程中自动调整和完善, 从而使系统的性能不断完善, 以达到预期的效果。 2 自调整模糊控制器的结构及仿真 (1> 控制对象 一般温度可近似用一阶惯性纯滞后环节来表示, 其传递函数为: 式中: K———对象的静态增益。 Tc———对象的时间常数。 τ———对象的纯滞后时间常数。 本文针对某干燥箱的温度控制, 用Cohn-Coon 公式计算各参数得: K=0.181。 Tc=60。τ=20。 ( 2> 自调整模糊控制器的结构 自调整模糊控制器的结构如图1 所示。 图1 带自调整因子的模糊控制器 图中α为调整因子, 又称加权因子。通过调整α值,可以改变偏差E 和偏差变化EC 对控制输出量U 的加权程度, 从而调整了控制规则。但是, 若α值一旦选定, 在整个控制过程中就不再改变, 即在控制规则中对偏差、偏差变化的加权固定不变。然而, 在实际控制中, 模糊控制系统在不同的状态下, 对控制规则中偏差E 与偏差变化EC的加权程度会有不同的要求。为了适应被控对象的结构和参数的变化, 并模拟人工控制中的学习过程可以构造一个如图1 所示的带自调整因子的模糊控制器, 其实质是一个二级模糊控制系统。 具体方法是: 将调整因子α看作是一个模糊集, 其论域为( 0, 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 目录 1、摘要 2、模糊控制器理论和基本结构 2.1模糊化 2.2知识库 2.3模糊推理机 2.4解模糊 3、中央空调系统控制方法 3.1控制目标和被控对象建模 3.2系统控制方案的设计 4、中央空调模糊控制器的设计 5、系统硬件设计 5.1单片机系统设计 5.2直流电机控制电路 6、系统软件设计 6.1PC软件设计 6.2控制规则自调整模糊控制器的设计 6.3PC机与单片机串口通信设计 6.4抗干扰设计 6.5误差分析 7、仿真实验 1摘要 在现代化的楼房大厦中,大多数采用了中央空调统一供热、制冷的方法。在每一个房间内都安装了热交换器和循环风机,通过设定风机的转速来改变换热量的大小,调节房间的温度。一般的控制器可以设定“高/中/低/关”四种模式。但这种控制方法的缺点是房间温度需要手动调节,各种环境因素的变化常常会使人们感到不适。 由于被控对象具有较大的惯性和迟延,受各种因素变化影响,因而对象的传递函数具有非线性和时变特性;对于各个空调控制器,由于房间情况和安装情况不同导致对象特性不同,采用常规PID控制难以取得较好的控制效果。而模糊控制是基于模糊规则的控制,可以引入设计者的经验,对非线性对象、大惯性大迟延对象以及数学模型不太清楚的对象都可以取得较好的控制效果,具有较好的鲁棒性。 法国ST公司生产的ST62系列单片机,具有优良的噪声免疫能力,可以直接与电力线连接,能为一般民用 电器的设计提供一种可靠性高、成本低的解决方法。基于ST62系列单片机,本文提出了具有实用价值的房间温度模糊控制器的设计方案。 2模糊控制器理论及基本结构 本节将介绍模糊控制(fuzzy control)的基本原理、结构分析、稳定性理论 选取一个模糊控制的实例讲解,有文章,有仿真,有详细的推导过程。 一.实验题目:基于模糊控制系统的单级倒立摆 二.实验目的与要求: 倒立摆是联结在小车上的杆,通过小车的运动能保持竖立不倒的一种装置,它是一个典型的非线性、快速、多变量和自然不稳定系统,但是我们可以通过对它施加一定的控制使其稳定。对它的研究在理论上和方法上都有其重要意义。倒立摆的研究不仅要追求增加摆的级数,而且更重要的是如何发展现有的控制方法。同时, 它和火箭的姿态控制以及步行机器 人的稳定控制有很多相似之处,由此研究产生的理论和方法对一般工业过程也有广泛用途。 本文研究了倒立摆的控制机理,用Lagrange 方法推导了一级倒立摆的数学模型,这为研究多级和其它类型的倒立摆甚至更高层次的控制策略奠定了一个良好的基础。对系统进行了稳定性、可控性分析,得出倒立摆系统是一个开环不稳定但可控的系统的结论。 本文主要研究用极点配置、最优控制和模糊控制方法对倒立摆进行稳定控制。最优控制方法是基于状态反馈,但能实现输出指标最优的一种控制方法,方法和参数调节较简单,有着广泛的应用。模糊控制有不依赖于数学模型、适用于非线性系统等优点,所以本文尝试了用模糊控制对倒立摆进行控制,以将先进的控制方法用于实际中。 同时,对倒立摆系统的研究也将遵循从建模到仿真到实控,软硬件结合的系统的控制流程。在这过程中,借助数学工具Matlab7及仿真软件Simulink,作了大量的仿真研究工作,仿真结果表明系统能跟踪输入,并具有较好的抗干扰性。最后对实验室的倒立摆装置进行了软、硬件的调试,获得了较好的控制效果。 三.实验步骤: 1.一级倒立摆系统模型的建立 在忽略了空气阻力、各种摩擦之后(这也是为了保证Lagrange 方程的建立),可 将一级倒立摆系统抽象为由小车和匀质杆组成的系统,本系统设定如下: 小车质量M;摆杆质量m,长为l;小车在x 轴上移动;摆与竖直方向夹角为θ,规定正方向如图所示;加在小车x 轴上的力为F; 第5章 模糊控制器设计的基本方法 5.1 模糊控制器的结构设计 结构设计:确定输入、输出变量的个数(几入几出)。 5.2 模糊控制规则设计 1. 语言变量词集 {}PB PM PS O NS NM NB ,,,,,, 2. 确立模糊集隶属函数(赋值表) 3. 建立模糊控制规则,几种基本语句形式: 若A 则B c R A B A E =?+? 若A 则B 否则C c R A B A C =?+? 若A 或B 且C 或D 则E ()()R A B E C D E =+?+????????? 4. 建立控制规则表 5.3 模糊化方法及解模糊化方法 模糊化方法 1. 将[]b a ,内精确量离散化为[]n n +-,内的模糊量 2. 将其区间精确量x 模糊化为一个单点集,即0)(,1)(==x x μμ 模糊推理及非模糊化方法 1. MIN-MAX ——重心法 11112222n 00R and R and R and and '? n n n A B C A B C A B C x y c →→→→= 三步曲: 取最小 1111'()()()()c A o B o C z x y z μμμμ=∧∧ 取最大 12''''()()()()n c c c c z z z z μμμμ=∨∨∨ 2. 最大隶属度法 例: 10.3 0.80.5 0.511234 5 C =+----- +++,选3-=*u 20.30.80.40.21101234 5 C =+ +++ + ,选 5.12 21=+=*u 5.4 论域、量化因子及比例因子选择 论域:模糊变量的取值范围 基本论域:精确量的取值范围 误差量化因子:e e x n k /= 比例因子:e y k u u /= 误差变化量化因子:c c x m k /= 5.5 模糊控制算法的流程 m j n i C u B EC A E ij j i ,,2,1;,,2,1 then then if ===== 其中 i A 、 j B 、ij C 是定义在误差、误差变化和控制量论域X 、Y 、Z 上的模糊集合,则该语句所表示的模糊关系为 j i ij j i C B A R ,??= m j n i j i C B A R z y x z y x ij j i ===== ,1 ,1)()()(),,(μμμ μ 根据模糊推理合成规则可得:R B A U )(?= Y y X x B A R U y x z y x z ∈∈=)()(),,()(μμμμ 设论域{}{}{}l m n z z z Z y y y x x x X ,,,,,,,Y ,,,,212121 ===,则X ,Y ,Z 上的模糊集合分别为一个n ,m 和l 元的模糊向量,而描述控制规则的模糊关系R 为一个m n ?行l 列矩阵。 由i x 及i y 可算出ij u ,对所有X ,Y 中元素所有组合全部计算出相应的控制量变化值,可写成矩阵()ij n m u ?,制成的表即为查询表或称为模糊控制表。 * 模糊控制器设计举例(二维模糊控制器) 1. 结构设计:二维模糊控制器,即二输入一输出。 2. 模糊控制规则:共21条语句,其中第一条规则为 t h e n o r and or if :1 PB u NM NB EC NM NB E R === 3. 对模糊变量E ,EC ,u 赋值(见教材中的表) 火电厂锅炉温度控制系统 锅炉温度的控制效果直接影响着产品的质量,温度低于或高于要求时要么不能达到生产质量指标有时甚至会发生生产事故。采用双交叉燃烧控制以锅炉炉膛温度为主控参数、燃料和空气并列为副被控变 量设计火电厂锅炉温度控制系统,以达到精度在5 ℃范围内。 工程控制是工业自动化的重要分支。几十年来,工业过程控制获得了惊人的发展,无论是在大规模的结构复杂的工业生产过程中,还是在传统工业过程改造中,过程控制技术对于提高产品质量以及能源的节约都起着重要的作用。 生产过程是指物料经过若干加工步骤而成为产品的过程。该过程中通常会发生物理化学反应、生化反应、物质能量的转换与传递等等,或者说生产过程表现为物流过变化的过程,伴随物流变化的信息包括物流性质的信息和操作条件的信息。 生产过程的总目标,应该是在可能获得的原料和能源条件下,以最经济的途径,将原物料加工成预期的合格产品。为了打到目标,必须对生产过程进行监视和控制。因此,过程控制的任务是在了解生产过程的工艺流程和动静态特性的基础上,应用理论对系统进行分析与综合,以生产过程中物流变化信息量作为被控量,选用适宜的技术手段。实现生产过程的控制目标。 生产过程总目标具体表现为生产过程的安全性、稳定性和经济性。 (1)安全性在整个生产过程中,确保人身和设备的安全是最重要和最基本的要求。在过程控制系统中采用越限报警、事故报警和连锁保护等措施来保证生产过程的安全性。另外,在线故障预测与诊断、容错控制等可以进一步提高生产过程的安全性。 (2)稳定性指系统抑制外部干扰、保持生产过程运行稳定的能力。变化的工业运行环境、原料成分的变化、能源系统的波动等均有可能影响生产过程的稳定运行。在外部干扰下,过程控制系统应该使生产过程参数与状态产生的变化尽可能小,以消除或者减少外部干扰可能造成的不良影响。 (3)经济性在满足以上两个基本要求的基础上,低成本高效益是过程控制的另外一个重要目标。为了打到这个目标,不进需要对过程控制系统进行优化设计,还需要管控一体化,即一经济效益为目标的整体优化。 工业过程控制可以分为连续过程工业、离散过程工业和间隙过程工业。其中,连续过程工业占的比重最大,涉及石油、化工、冶金、电力、轻工、纺织、医药、建材、食品等工业部门,连续过程工业的发展对我国国民经济意义最大。过程控制主要指的就是连续过程工业的过程控制。 锅炉是工业生产中不可缺少的动力设备,它多产生的蒸汽不仅能够为蒸馏、化学反应、干燥、蒸发等过程提供热源,而且,还可以作为风机,压缩机、泵类驱动透平的动力源。随着石油化学工业规模的模糊控制器的设计
温度的模糊控制
锅炉内胆温度控制系统设计
基于模糊温度控制的MATLAB仿真
模糊控制器的设计知识讲解
锅炉过热蒸汽温度控制系统设计
单片机的模糊温度控制器的设计方案
中央空调温度模糊控制器的设计
选取一个模糊控制的实例讲解
模糊控制器设计的基本方法
火电厂燃煤锅炉温度控制系统