容积粒子滤波在紧耦合SINS/GPS导航系统中的应用
车载SINS/GPS组合导航系统自适应联合滤波模型

车载SINS/GPS组合导航系统自适应联合滤波模型
陶俊勇;陶利民
【期刊名称】《航空电子技术》
【年(卷),期】1999(000)003
【摘要】在建立车载组合导航系统联合滤波模型及算法的基础上,定义了联合滤波模型融合信息在各子滤波器中的分配准则;实现了联合滤叔模型信息分配系数的自适应调节,理论分析和计算机仿真结果均表明,引入该准则的自适应联合滤波模型及算法大大提高了系统容钷性和定位严谨。
【总页数】5页(P30-34)
【作者】陶俊勇;陶利民
【作者单位】国防科技大学机械电子工程与仪器系;国防科技大学机械电子工程与仪器系
【正文语种】中文
【中图分类】TN967.2
【相关文献】
1.GPS/SINS组合导航系统中自适应滤波器 [J], 黄春梅;尹新
2.一种自适应联合卡尔曼滤波器及其在车载GPS/DR组合导航系统中的应用研究[J], 房建成;申功勋;万德钧
3.自适应联合滤波模型及其在车载SINS/GPS组合导航系统中的应用 [J], 陶俊勇;邱静;温熙森;钱彦岭
4.车载GPS/DR/地图匹配组合导航系统的自适应联合卡尔曼滤波模型 [J], 房建成;
申功勋;万德钧
5.一种SINS/GPS紧组合导航系统的改进自适应扩展卡尔曼滤波算法 [J], 孟秀云;王语嫣
因版权原因,仅展示原文概要,查看原文内容请购买。
SINS/GPS组合导航的扩展Kalman滤波算法
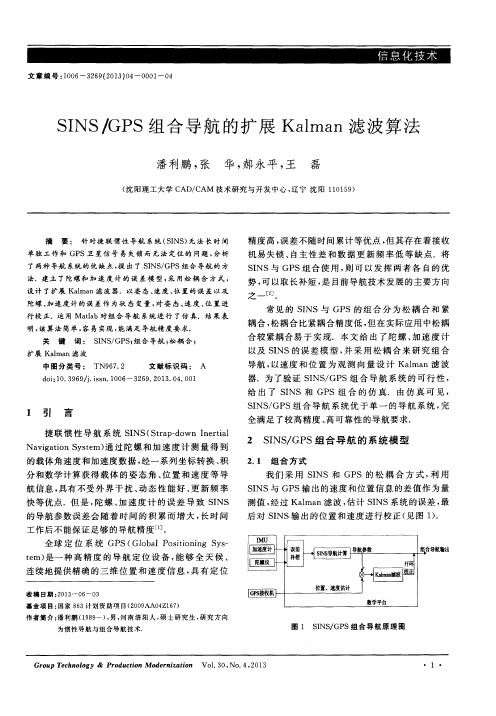
我们采用 S I NS和 G P S的 松 耦 合 方 式 , 利 用
航 信息 , 具 有不受 外 界 干扰 、 动态 性 能好 、 更 新 频 率
快 等优 点.但 是 , 陀螺、 加速度计的误差导致 S I NS 的导航 参数 误差 会 随 着 时 间 的积 累 而增 大 , 长时 间 工 作后 不能 保证 足够 的导 航精 度 l 1 ] .
文献标识码 : A
32 69 .2 01 3. 0 4. 001
给出了 S I NS和 G P S组 合 的 仿 真. 由仿 真 可 见 ,
1 引 言
捷联惯性 导航系统 S I NS ( S t r a p — d o wn I n e r t i a l
S I NS / GP S组 合 导 航 系 统 优 于单 一 的导 航 系 统 , 完 全 满足 了较 高精 度 、 高 可靠性 的 导航要 求 .
明, 该 算法简单 , 容 易 实现 , 能 满 足 导 航 精 度 要 求.
关 键 词: S I N S / l ma n滤 波
中 图 分 类 号 : TN 9 6 7 . 2 d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 6
但 由于加速 度计 的 随机 常 数 和 白噪声 较 小 , 因此 通
Na v i g a t i o n S y s t e m) 通 过 陀 螺 和加 速度 计 测 量 得 到 的载 体角 速度 和加 速度 数据 , 经一 系列 坐 标转 换 、 积 分 和数 学计 算 获得 载 体 的 姿 态 角 、 位 置 和 速度 等 导
2 S I NS / GP S组 合 导 航 的 系 统 模 型
GPSSINS超紧耦合组合导航系统的信息融合算法研究中期报告

GPSSINS超紧耦合组合导航系统的信息融合算法研究中期报告GPSSINS是一种超紧耦合组合导航系统,结合全球定位系统(GPS)和惯性导航系统(INS)的特点,可以提高导航系统的精度和可靠性。
在GPSSINS中,GPS提供位置和速度信息,INS提供姿态和加速度信息。
信息融合算法是将这两个系统融合在一起,得到更准确的导航结果的关键。
本次中期报告主要介绍了GPSSINS超紧耦合组合导航系统信息融合算法的研究情况,包括以下几个方面:1. GPS信号弱化对导航精度的影响GPS信号受到天气、地形和建筑物等因素的影响,会发生信号衰减和多径效应,导致定位精度下降。
针对这一问题,我们采用了多路径补偿和信号干扰削弱技术,优化GPS信号的接收和处理方式,从而提高导航精度。
2. INS误差累积对导航精度的影响INS存在着漂移和零偏等误差,这些误差会随着时间的推移累积,导致导航精度下降。
为了解决这一问题,我们研究了基于卡尔曼滤波的误差补偿方法,实现对INS误差的实时补偿,从而提高导航精度。
3. 数据融合算法的优化在GPSSINS中,GPS和INS的数据需要进行融合才能得到准确的导航结果。
我们研究了多种数据融合算法,包括基于权值的融合算法和基于粒子滤波的融合算法等,通过对比实验确定了最优算法。
4. 系统仿真与实验验证为了验证GPSSINS超紧耦合组合导航系统信息融合算法的有效性,我们进行了系统仿真和实验验证。
仿真结果表明,我们提出的算法可以有效地提高导航精度;实验结果也验证了这一结论。
总之,本次中期报告介绍了GPSSINS超紧耦合组合导航系统信息融合算法的研究情况,通过对GPS信号弱化、INS误差累积和数据融合算法的优化,实现了对导航精度的有效提高。
后续工作将进一步优化算法,提高系统的可靠性和实用性。
GPS、INS组合系统在智能车辆导航中的应用
GPS、INS组合系统在智能车辆导航中的应用作者:谢王宝王琳来源:《科协论坛·下半月》2013年第12期摘要:当代科技的迅猛发展,单一的导航定位定向系统已难以满足我国在民用和军事领域对导航、定位与定向精度的要求,因此,GPS和INS结合的组合导航系统将是一个新的发展方向。
组合导航定位定向系统以其高精度、低成本的优势将被各个领域应用。
GPS、INS各有所长,若将二者组合起来,其性能将优于二者单独使用时的性能。
关键词:GPS INS 组合导航系统中图分类号:V249 文献标识码:A 文章编号:1007-3973(2013)012-088-021 GPS/INS组合导航系统与卡尔曼滤波器卡尔曼滤波器(Kalman filter)在实现组合导航系统中作用是至关重要的。
采用卡尔曼滤波器的GPS与INS的软件三种模式的组合方式:松耦合、紧耦合、超紧耦合。
2 SINS/GPS组合导航系统建模离散化后的系统方程为:此方法采用导航系统的输出相对应量的差值作为观测量,以进行卡尔曼滤波,通过对系统的误差值的估计,得出精确度较高的误差值,将此反馈给INS进行调整,最后,由INS输出最优的定位结果。
3 速度与位置组合的SINS/GPS导航仿真模拟实验利用计算机对设计组合导航系统的性能进行仿真,是评价组合导航系统的设计质量、性能和调整组合滤波器设计参数的重要方法。
3.1 仿真条件假设车辆的行驶速度为常数,系统噪声与量测噪声的分量均为白噪声。
(见表1)取滤波周期T=1s;一阶马尔科夫相关时间Tr=300s;运行时间35h。
设位置+速度组合时量测噪声的方差阵:代入卡尔曼滤波方程中中经计算可知P(k)收敛,即协方差矩阵P(k/k-1)收敛,可见,位置+速度组合中经度误差、纬度及东、北速度估计误差滤波精度都得到明显提高。
3.2 SINS/GPS组合导航系统流程图(见图1)4 结论本文采用的卡尔曼滤波技术在工程实际中实现的过程中会有难度,这是因为其要求数学模型必须非常准确,且算法稍有复杂。
景象匹配辅助的GPS_SINS组合导航算法(1)
n) 表示GPS( i = 1) 、SIN S( i= 2) 和SM ( i= 3) 第ki 次
的观测值, 其采样率为 si, 所对应的采样时刻为 l iki,
并且有
x( i , ki ) = x( l iki) , i = 1, 2, 3.
( 3)
其中: l1 = 1、k1 = k。采样率si 之间有下列关系
C( 3, k3 ) =
.
0 00 1 0 00 0 0
( 7)
R 其中 I9 表示 9 阶单位矩阵。观测误差 v( i , ki ) ∈
q ×1 i
是方差为R( i , ki) 的零均值Gaussian 白噪声, 并假设
与系统噪声互不相关。初始状态向量x( 0) 是一个随
机变量, 均值和方差分别为 x0 和 P0, 并假设 x ( 0) 、
( 14)
P( k k - 1) = A( k - 1) P( k - 1 k - 1) AT ( k - 1) + Q( k - 1) ,
( 15)
K( k ) = P( k k - 1) CT ( 1, k ) ×
[ C( 1, k ) P( 1, k k - 1) CT ( 1, k ) + R( 1, k) ] - 1.
施 航, 等: 景象匹配辅助的 G PS/ SIN S 组合导航算法
11 83
GPS 可以给出东、北、天向的位置和速度数据, 而SINS 可以给出载体在各个方向的位置、速度和加 速度。SM 实时拍摄地面图像, 通过搜索实时图在基 准图中的位置可以给出载体的东、北向位置数据。因
此, 为了确定载体的状态, 利用GP S、SIN S 和SM 分 别 对 目 标 进 行 观测 的 组 合 导 航 系 统 可 描 述
粒子滤波算法在GPS/DR组合导航中的应用

21 0 0年 O 2月
测 绘 科 学 技 术 学 报
J u n lo o aisS in ea dTe h oo y o r a fGe m tc ce c n c n lg
V0 . 7 NO 1 I2 . Fe . 2 1 b O0
文章 编 号 :6 36 3 ( 0 0 0 — 0 70 1 7 — 3 函 数 的选 择 1题 , 针 9 系统 地 分 析 比较 了改 进 的粒 子 滤 波 算 法 。 在 此 基 础 上 提 出 了一 种 新 的
粒 子滤 波 算 法—— 自适 应 渐 消扩 展 K l n粒 子 滤 波 方 法 该 方 法 用 渐 消 扩 展 Kama ama l n滤 波 产 生建 议 分 布 函 数, 由于 参 数 的可 在 线调 节性 , 得 系统 具 有 更 好 的 自适 应 性 和 鲁棒 性 。 与用 转 移 先验 、 展 Ka n滤波 、 使 扩 l ma 自 适 应扩 展 K l n滤 波 、 代扩 展 Ka n滤波 以及 无 迹 Ka n滤 波 产 生 建 议 分 布 函数 的 粒 子 滤 波 方 法 相 ama 迭 l ma l ma 比, 自适 应 渐 消 扩展 Ka n粒子 滤 波 进 一 步 提 高 了粒 子 滤 波 的 精 度 通 过 对 G S与 航 位 推 算 ( R 组 合 导 l ma P D )
中 图分 类 号 : 2 7 P 0
Ap l aino atceFl rn g rtmsi S DR ner tdNa iain pi to fP ril ieigAlo i c t h nGP / I tgae vg t o
GONG —o g ,GUIQig m ig ,LIB o l Yi n s n— n a —i ,ZHOU n 。 Nig
高斯粒子滤波的惯性/GPS紧组合算法

高斯粒子滤波的惯性/GPS紧组合算法于永军;徐锦法;熊智;张梁【摘要】To improve the reliability of integrated navigation, a tightly coupling nonlinear model based on pseudo range and rate is proposed for reducing the estimation error of tradi⁃tional algorithm using linear measurement model in this work. For the application of particle filtering to SINS/GPS tightly integrated navigation system, the dimension of the state variables has been a major constraint for the Real⁃time system. In this new arithmetic, a linear KF deduction and nonlinear GPF method have been employed for the linear part and the non⁃linear part to improve the precision and real time performance, respectively. Results from the simulation show that the hybrid algorithm can effectively improve the performance of the integrated navigation system, and the precision increases one time.%为提高组合导航系统的可靠性,针对以伪距、伪距率残差为量测信息的紧组合算法会带来线性化误差的缺点,推导了基于伪距、伪距率的非线性紧组合模型。
改进重采样粒子滤波算法在GPS中的应用
・人 工 智 能 ・
2 1, 1 00 1(1 3 )
22 53
改进重采样粒子滤波算法在 G 中的应用 P S
李子 昱 , 秦 红磊
( 北京 航 空航 天 大学 电子 信 息工程 学院 ,北 京 10 9 ) 0 11
K l n l r (KF, wempo e e ea l g to rh KP .Acodn ert a aayia d o ue muain n ama ft E ) ie rv d h smpi h df e i t r n me ot E F crig o hoei l nlss mp t s l o tt c c n ri t i
E KP n e i r v d E F a dt h mp o e KPF t i e a v l ai n f r h s l o t m si i e e t t t s s T esmu a i n r s l e n tae t a o g v n e a u to e e a g r h d f r n au e . h i lt e ut d mo sr t t o t i n f s o s h h ro m n eo t ep o o e t o a v o s mp o e n mp r dt o h r t e e f r a c f h r p s dme h dh s b i u r v me t o a e t e t o s t h tt s f ih d n mi , i hmo i t . p o i c o meh d esau h g y a c h g b ly at o i Ke r s n n i e l r g e t n e l n l r p r ce f tr r s mp i g go a o i o i g s se ywo d : o l a f t i ; x e d d Kama f t ; at l le ; e a l ; l b l s i n n y tm nri en i e i i n p t
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ke y wo r d s :C u b a t u r e p a r t i c l e i f l t e r ( C P F) S I NS / GP S i n t e g r a t e d n a v i g a t i o n No n l i n e a r s y s t e m K a l ma n i f l t e r D a t a f u s i o n
当 = 0时 , 从初始状态分布 p ( x 。 ) 中抽 取 Ⅳ个 权 值为 1 / N、 方差为 P 的粒 子集 。
C K F算法 _ 6 将 非 线性 滤 波 归结 为 非线 性 函数 与 高斯概率密度乘积的积分求解 问题 。基于高斯假设 的 贝叶斯算法采用 2 n个 等权值 的求容 积点 实现非 线性
紧耦合方式是将 G P S系统和 S I N S系 统作 为整体
进行设计 , 将伪距 和伪距率作为观测量 , 利用现代滤波
方 法实现 S I N S与 G P S的组合 。在这种情况下 , 系统方
程是非线性 的 , 卡 尔曼滤 波难 以直接处 理 。粒子 滤波
( p a r t i c l e i f l t e r, P F ) 直接采 用非线性模 型 , 具有较 好 的 估 计精 度 , 受 到 学者 的青 睐 ] 。但 在 S I N S / G P S组 合
逼近。在解决 高维非线性 滤波 问题 方面 , C K F具 有较
高的数值稳定性和滤波精度 。 根据求容积规则 , 可得 :
② 重要性采样
当 =1 , 2 , …, n时 , 每一 个 ( 一 1 ) 时刻 的粒子 的 和P 一 通过 C K F更新得 到 。和 , 重要性 密度 函数 为 “ ~ 竹( 。 Z ) = Ⅳ( , p i ) 。
系统 的数据融合 问题
s y s t e m, S I N S ) 具 有 自主性 和抗 干扰 能力强 的优 点 , 而 全球定位 系统 ( G P S ) 能提供全球高精度 的三维实时导 航信 息 , 将S I N S和 G P S二者相 组合 . 可 以实现优 势互 补, 提供高 精度 、 全 天候 的导航 服务 … S I N S / G P S组 合导航 系统在航空航天 、 精确制导武器 、 大地测量和智
的非线 性粒 子滤 波存 在粒子 退化 和样本 枯竭 的 问题 。对 此 , 提 出将 容积 粒子 滤波 ( C P F ) 算法应 用 于 S I N S / G P S组合 导航 系 统 。 C P F利 用容 积卡 尔曼 滤波算 法得 到粒子 滤波 ( P F ) 的重 要性 密度 函数 , 并 将最新 量 测 值融 人 系统 状态 的转移 过 程 中 , 由此产 生 的预 测 样本 接 近于 系统 状态 的真实 后验 概率 的样本 。仿 真结果 表 明 , C P F算法 的估 计性 能 明显 优 于标准 P F 。 关键 词 :容 积粒 子滤 波 ( C P F ) S I N S / G P S 组 合导航
0 引言
捷联 惯 性 导航 系 统 ( s t r a p . d o w n i n e r t i a l n a v i g a t i o n
的随机误差 、 漂移 以及 G P S的各种 噪声 , 且 系统 方程 的状态维数多达 2 0维 。随着维数的增加 , 粒子滤波本 身 的计算量也 急剧增 加 , 很多 常规 的粒子 滤波算 法不 能满足实 时性 的要求 ] 。因此 , 本文 采用 一种最 新提 出的非线性滤 波—— 容积粒 子 滤波[ 4 技术( c u b a t u r e p a r t i c l e i f l t e r , C P F ) 来 解决 紧耦合 S I N S / G P S 组 合 导航
用 以下两个离散 的系统方程表示 。
① 状态方程 :
X , ¨) ( 1 )
第一作 者任 波 ( 1 9 6 2 一 ) , 男, 1 9 9 0年 毕 业 于哈 尔滨工 程 大 学导 航 、 制
导 与控 制 专业 , 获硕 士 学位 , 教授 ; 主 要从 事 目标 探 测 与识 别技 术 、 信 息
容积粒子滤波在 紧耦合 S I N S / GP S导航 系统 中的应用 任
波, 等
容 积粒 子滤 波 在 紧耦 合 S I N S / G P S导航 系统 中的应 用
Ap p l i c a t i o n o f Cu b a t u r e P a r t i c l e F i l t e r i n Ti g h t l y Cou p l e d SI NS /GP S Na v i g a t i o n S y s t em
容积粒子滤波在紧耦合 S I N S / G P S导航 系统 中 的应 用 任 波 , 等
以上两式 中 : 和z 分别 为 时刻系统 的状 态 向 量和观测 向量 ; 和 分别 为相 互独 立 的系统 噪声
和观测噪声 , W ~ U( O , Q ) , ~ Ⅳ( 0 , R ) 。 1 . 1 容积卡尔曼滤波
3
能交通 系统等领域 具有很好 的使 用价值 , 越来越受 到
人们 的关 注。
浩
9
4
1 容 积粒 子滤 波
选择重要性概率密度是克服标准粒子滤波方法 中 粒子退 化 的 关 键 。较 之 于 扩 展 卡 尔 曼 滤 波 器 算 法
( e x t e n d e d K a l m a n i f l t e r , E K F)和 无 损 卡 尔 曼 滤 波 ( u n s c e n t e d K a l m a n i f l t e r , U K F) , 容 积 卡 尔 曼 滤 波
1 . 2 容积粒子滤波算法
令 是均值为 、 方差 为 、 服从 高斯分 布函数 l V ( x ; , P ) 的随机 变量 , P ( ) 为状 态 的概率 分 布, p ( z I x ) 为似 然 函数 , 借 鉴文 献 [ 5 ] ̄[ 8 ] 中关 于 C P F算法 的框架结 构 , 得到 C P F的算法流程如下 。 ① 初 始化
l ( f ) =J _ 厂 ( ) N ( ; 0 , I ) d x 一荟 八 ) ( 3 )
导航 系统 的数据处 理过程 中 , 需要考 虑陀 螺加速 度计
国家 自然科 学基金 资助项 目( 编号: 6 0 9 7 4 0 7 0 ) 。
修 改稿 收到 日期 : 2 0 1 3 — 0 4 — 1 4 。
( c u b a t u r e K a l m a n i f l t e r , C K F ) 更容 易产 生 真实 反 映 函 数分布 的重要性概率 密度 , C K F能够使 建议 性密 度 函 数更加接近于真实后验概率密度 。动态非线性系统采
中 图分 类 号 :T P 1 4 文 献标 志码 :A
非线性 系统
卡 尔曼 滤波
数据 融合
ቤተ መጻሕፍቲ ባይዱ
Abs t r a c t : Du e t o h i g h d i me n s i o n a l s t a t e a n d no n l i n e a r mi x e d mo d e l e x i s t i n d a t a f u s i o n o f S I NS /GP S t i g h t l y c o u p l e d n a v i g a t i o n s y s t e m,
c o n v e n t i o n a l l i n e a r K a l m a n i f l t e r i s i n c o m p e t e n t ; w h i l e g e n e r a l n o n l i n e a r p a r t i c l e f i h e r( P F ) f e a t u r e s p a r t i c l e d e g r a d a t i o n a n d s a m p l e d e p l e t i o n p r o b l e m s , t h u s t h e c u b a t u r e p a t r i c l e i f l t e r( C P F )a l g o i r t h m i s a p p l i e d i n S I N S / G P S i n t e g r a t e d n a v i g a t i o n s y s t e m .wi f h C P F 。t h e i m p o t r a n c e