1.Distributed Systems
abbreviation of the distributed control systems

DCS is the abbreviation of the distributed control systems (Distributed Control System), also known as a distributed control system in the country self-control industry.The so-called distributed control systems, or in some of the information called the distribution system is relative to the centralized control system, a new computer control system, which is developed on the basis of a centralized control system, the evolution Come on. In terms of system functionality, the difference between the DCS and centralized control system, but the system function is completely different.First of all, the DCS skeleton - System Network, which is the basis and core of the DCS. Network for real-time, reliability and scalability of the entire DCS system, plays a decisive role, so the manufacturers in this regard, a careful design. For the DCS system network, it must meet the requirements of real-time, that is determined within the time limit to complete the transmission of information. Here the word "OK" time limit refers to the information transfer can be completed within this time limit in either case, this time limit is asked to identify the real-time control process. Therefore, the rate of the measurement system network performance indicators is not a network, commonly referred to as bits per second (bps), but real-time network system, that is, in a long time to ensure that the transmission of information required to complete . System network must also be very reliable, in any case, the network communication can not be interrupted, so the majority of manufacturers DCS dual bus, ring or double star network topology. In order to meet the requirements of the system scalability, the maximum number of nodes of the system on the network access should be higher than the actual use of the number of nodes several times. Thus, on the one hand, you can always add a new node, it can also make the system operation of the network lighter communication load state in order to ensure real-time and reliability of the system. In the actual running of the system, each node of the Internet and the network is always likely to occur, in particular, the operator station, network reconfiguration often, and this operation must not affect the normal operation of the system, so the system The network should have a strong online network reconfiguration functions.Secondly, this is a completely on-site I / O processing and direct digital control (DOS) function network node. To set the general set of DCS in the field I / O controllers to share the whole system I / O and control functions. This can be avoided and a site failure caused by the failure of the entire system, improve system reliability, you can also enable the site to share the data acquisition and control functions help to improve overall system performance. DCS operator station is to deal with all the man-machine interface (HMI-Human Machine Interface or the operator interface) and run the operation function of the network nodes.Network system is the DCS engineer station, it is off-line configuration of the DCS configuration work and on-line system monitoring, control, maintenance of the network nodes, and its main function is to provide the DCS configuration,the configuration tools (that is, the configuration software), and DCS-line run-time real-time monitoring of the operation of each node on the DCS network, enables system designers to adjust the system configuration and system parameters set by engineer station in a timely manner, the DCS at any time in the most excellent working state. Centralized control system, DCS system configuration functions can be said that the system configuration can not be called DCS.DCS since its inception in 1975, has experienced 20 years of development. In the past 20 years, although the DCS system architecture without a significant change, but through continuous development and improvement of its functionality and performance have been a huge increase. Overall, the DCS is toward more open, more standardized, more product-oriented direction.As the field of production process automation and computer control system, the traditional DCS is a narrow concept. If the DCS is thought only of the production process automation systems, it will lead to wrong conclusions, because the meaning of the computer control system has been greatly expanded the, which includes not only the content of the DCS in the past, but also drill down to the site each measuring equipment, implementing agencies, development up to production management, all aspects of the business. DCS in the traditional sense refers to the production process to control this part of the automation, the concept of industrial automation systems; you should locate a comprehensive solution to the enterprise, the level of the total solution. Only from this perspective, ask questions and solve problems in order to make the computer automation to truly play its due role.The DCS (Distributed Control System), distributed control system referred to as the general habit is called the distributed control system. DCS is a process control level and process monitoring level consisting of multi-level computer systems, communication networks as a link 4C technology, its basic idea is a combination of computer, communications, display and control, decentralized control, centralized operations, hierarchical management configuration flexibility and easy configuration. DCS has the following characteristics:(1) high reliability. DCS system control functions scattered in various computer system architecture using fault-tolerant design, a computer failure will not result in the loss of the other features of the system. In addition, the relatively simple tasks to be undertaken by the computer system, a dedicated computer has a specific structure and software for the need to implement the function, so that the reliability of each computer system has also improved.(2) Openness. DCS uses the open, standardized, modular and serial design, the computer system using LAN-way communications, information transfer and the need to change or expand the system functionality will add the computer to easily connect the system communication network or removed from the network, almost does not affect the work of the other computer.The definition of the DCS360毕业设计网友情提供DCS is the abbreviation of the distributed control systems (Distributed ControlSystem), also known as a distributed control system in the country self-control industry.It is the communications network as a link composed of a process control level and process monitoring level multi-level computer systems, integrated computer (Computer), communications (Communication), display (CRT) and control (Control), 4C technology, the The basic idea is decentralized control, centralized operations, hierarchical management, flexible configuration, convenient configuration. )Its development can be divided into three stages.The first stage :1975-1980, in the technical characteristics of the distributed control system of this period as follows:1) microprocessor-based control unit, decentralized control, there are a variety of algorithms, to complete the loop control configuration independent, self-diagnostic function2) The operator station with a CRT monitor and the process of cell separation, centralized monitoring, and centralized operation3) more advanced redundant communication systemsThe second stage :1980-1985. Technical characteristics of the distributed control system in this period as follows:1) the number of bits of the microprocessor to improve CRT monitor resolution2) strengthen the modular system3) Strengthening the system of information management, strengthen the communication functionThe third phase, after 1885, the distribution system into the third generation of its technical characteristics are as follows:1) the management of open systems2) The operator station with 32-bit microprocessor3) using real-time multi-user multi-tasking operating systemAfter the 1990s, computers and technology are advancing by leaps and bounds, more new technologies are applied to the DCS. PLC is a sequential logic control developed electronic devices, it is mainly used to replace the inflexible and cumbersome relay logic. Into the mid-nineties, the fieldbus technology development is very rapid, so that some people have been made to predict: Fieldbus-based FCS will replace the DCS become the protagonist of the control system.DCS is referred to as the Data Communication Subsystem (data communication subsystem).The railway industry, for example, the DCS is a pure and transparent, non-security system; he is a carrier of the packets sent between the control center and the train.DCS second layer of meaning: Dorsal Column Stimulator [medical] spinal stimulatorSpecial control areas, such as the meaning of the nuclear power plant controlsystem, DCS digital control system (Digital control system).The major manufacturers of domestic DCS: Shanghai Xinhua, the super control, State Power Zhishen SUPCON the, and Lee, the Chinese of Shanghai, Shanghai Leroy, in self and other. Foreign Westinghouse (Emerson), FOXBORO, ABB, Siemens, Honeywell, Yokogawa, Yamatake - Honeywell, the FISHER-ROSEMOUNT companiesDCS features and DevelopmentDCS is a distributed control system (Distributed Control System) referred to the general habit known as the distributed control system. It is the communications network as a link composed of a process control level and process monitoring level multi-level computer systems, integrated computer (Computer), communications (Communication), display (CRT) and control (Control), 4C technology, the The basic idea is decentralized control, centralized operations, hierarchical management, flexible configuration, convenient configuration.DCS has the following characteristics:(1) high reliability due to the DCS system control functions scattered in various computer system architecture using fault-tolerant design, a computer failure will not lead to the loss of other functions of the system. In addition, the relatively simple tasks to be undertaken by the computer system, a dedicated computer has a specific structure and software for the need to implement the function, so that the reliability of each computer system has also improved.(2) open DCS using open, standardized, modular and serial design, the computer system using the LAN mode communication, information transmission, when the need to change or expand the system functionality, will add the computer easily even into the system communications network or removed from the network, almost does not affect the work of the other computer.(3) flexibility through configuration software application object depending on the process of hardware and software configuration, that is, to determine the measurement and control signals and inter-connection between the control algorithm library, select the applicable control law as well as basic graphics from the graphics library calls composed required for a variety of monitoring and alarm screen, which constitute the control system.(4) easy to maintain the function of a single small or micro-dedicated computer, maintaining a simple, convenient features, and when a local or a computer failure can not affect the operation of the entire system line replacement, rapid troubleshooting .(5) coordination of the various workstation through the communication network to transmit various data, the entire system, information sharing, coordination, in order to complete the overall function of the control system and optimized.(6) control features complete control algorithm rich set of continuous control, sequence control and batch control can be achieved in one cascade,feedforward, decoupling, adaptive and predictive control, advanced control, and can easily add the required special control algorithms. The DCS constitutes a very flexible way, by a dedicated management computer stations, operator stations, engineer station, recording stations, site controllers and data acquisition stations, components, may also be of general-purpose servers, industrial control computer and programmable controller. Process control level in the bottom of the generally distributed on-site controllers, data acquisition station in situ data acquisition and control, production monitoring level computer and transmitted through the data communications network. Production monitoring level for centralized operation and management of data from the process control level, such as a variety of optimization calculations, statistical reports, fault diagnosis, display alarm. With the development of computer technology, the DCS can be connected through the network in accordance with the higher performance computer equipment to achieve more advanced centralized management capabilities, such as planning and scheduling, warehouse management, energy management.DCS in the development and application of state of the domestic and foreign 1975 America's largest instrument control the company Honeyw ell for the first time introduced to the world of integrated distributed control system of the TDC-2000 (Toal D, ist ribu ted of Con t ro l The -2 000), this system, it immediately sparked the U.S. industrial control spoke highly of the profession, known as "the most inspiring event." The world's major companies followed suit, launched one after another distribution system, from process control to enter a new era of distributed systems.During this period the introduction of Japan's Yokogawa CEN TUM ', Taylor Instrument Company MO SË, Fischer's DCÉ of -400, Bailey N -90, the Foxboro Cpect rum and the German Siemens company telepermm.With the computer, especially the rapid development of micro-computer and network technology, coupled with the intense competition of the manufacturers, so that DCS quickly from the first generation in the 1970s to the early 1990s the third generation of DCS. Distribution system before the technical level is already high, but there is a main ills: major companies launched dozens of models of the system, almost all of the Company's patented product, each company in order to protect their own interests, are used in proprietary network, which is the whole plant, the management of enterprise-wide cause problems. With the development of computers and network development so that the control firm to greater use of commercial computer technology, many companies launch the next generation of distributed control system in the late 1980s, its main feature is the local network of the new system of MA P Agreement; reference to Intelligent Variable transmitter and the field bus architecture; the introduction of the PLC sequence control and batch control, the DCS also has the function of the PLC control software.To the early 1990s, countries well-known of the DCS there are: 3000, Bailey, of the IN the FI-90, of Ro semoun t - the RS-3, the W est. Hoo, se of the WDPF,L, eeds & the Non th RUP the MAX-1000, Foxbo ro the IöA S- Japan's Yokogawa CEN TUM '. Mentioned here are large-scale DCS, in order to adapt to the needs of the market the manufacturers have also developed a number of small DCS system, such as S-9000, the MAX-2, LXL, A 2 the PACS.。
Distributed System Architectures

A client-server system
Computers in a C/S network
Layered application architecture
Presentation layer Concerned with presenting the results of a computation to system users and with collecting user inputs. Application processing layer Concerned with providing application specific functionality e.g., in a banking system, banking functions such as open account, close account, etc. Data management layer Concerned with managing the system databases.
A client-server ATM system
Three-tier architectures
In a three-tier architecture, each of the application
architecture layers may execute on a separate processor. Allows for better performance than a thin-client approach and is simpler to manage than a fat-client approach. A more scalable architecture -as demands increed.
A Survey of Cyber-Physical Systems
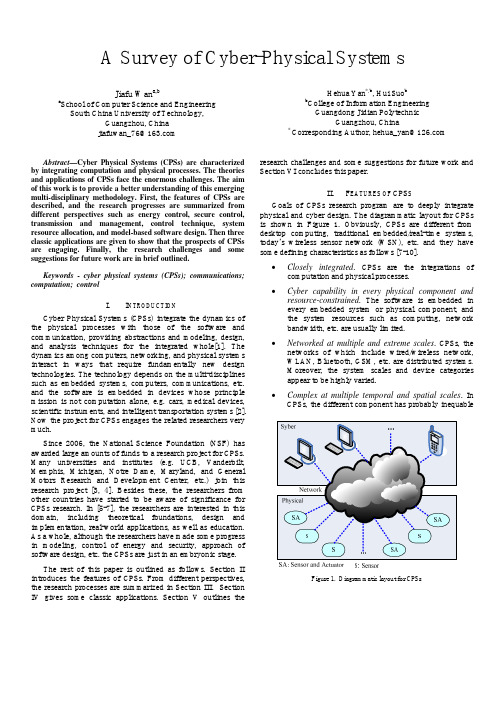
A Survey of Cyber-Physical SystemsJiafu Wan a,ba School of Computer Science and EngineeringSouth China University of Technology,Guangzhou,Chinajiafuwan_76@Hehua Yan*,b,Hui Suo bb College of Information EngineeringGuangdong Jidian PolytechnicGuangzhou,China*Corresponding Author,hehua_yan@Abstract—Cyber Physical Systems(CPSs)are characterized by integrating computation and physical processes.The theories and applications of CPSs face the enormous challenges.The aim of this work is to provide a better understanding of this emerging multi-disciplinary methodology.First,the features of CPSs are described,and the research progresses are summarized from different perspectives such as energy control,secure control, transmission and management,control technique,system resource allocation,and model-based software design.Then three classic applications are given to show that the prospects of CPSs are engaging.Finally,the research challenges and some suggestions for future work are in brief outlined.Keywords-cyber physical systems(CPSs);communications; computation;controlI.I NTRODUCTIONCyber Physical Systems(CPSs)integrate the dynamics of the physical processes with those of the software and communication,providing abstractions and modeling,design, and analysis techniques for the integrated whole[1].The dynamics among computers,networking,and physical systems interact in ways that require fundamentally new design technologies.The technology depends on the multi-disciplines such as embedded systems,computers,communications,etc. and the software is embedded in devices whose principle mission is not computation alone,e.g.cars,medical devices, scientific instruments,and intelligent transportation systems[2]. Now the project for CPSs engages the related researchers very much.Since2006,the National Science Foundation(NSF)has awarded large amounts of funds to a research project for CPSs. Many universities and institutes(e.g.UCB,Vanderbilt, Memphis,Michigan,Notre Dame,Maryland,and General Motors Research and Development Center,etc.)join this research project[3,4].Besides these,the researchers from other countries have started to be aware of significance for CPSs research.In[5-7],the researchers are interested in this domain,including theoretical foundations,design and implementation,real-world applications,as well as education. As a whole,although the researchers have made some progress in modeling,control of energy and security,approach of software design,etc.the CPSs are just in an embryonic stage.The rest of this paper is outlined as follows.Section II introduces the features of CPSs.From different perspectives, the research processes are summarized in Section III.Section IV gives some classic applications.Section V outlines the research challenges and some suggestions for future work and Section VI concludes this paper.II.F EATURES OF CPS SGoals of CPSs research program are to deeply integrate physical and cyber design.The diagrammatic layout for CPSs is shown in Figure1.Obviously,CPSs are different from desktop computing,traditional embedded/real-time systems, today’s wireless sensor network(WSN),etc.and they have some defining characteristics as follows[7-10].∙Closely integrated.CPSs are the integrations of computation and physical processes.∙Cyber capability in every physical component and resource-constrained.The software is embedded inevery embedded system or physical component,andthe system resources such as computing,networkbandwidth,etc.are usually limited.∙Networked at multiple and extreme scales.CPSs,the networks of which include wired/wireless network,WLAN,Bluetooth,GSM,etc.are distributed systems.Moreover,the system scales and device categoriesappear to be highly varied.∙Complex at multiple temporal and spatial scales.In CPSs,the different component has probablyinequable Figure1.Diagrammatic layout for CPSsgranularity of time and spatiality,and CPSs are strictlyconstrained by spatiality and real time.∙Dynamically reorganizing/reconfiguring.CPSs as very complicated systems must have adaptive capabilities.∙High degrees of automation,control loops must close.CPSs are in favor of convenient man-machineinteraction,and the advanced feedback controltechnologies are widely applied to these systems.∙Operation must be dependable,certified in some cases.As a large scale/complicated system,the reliability andsecurity are necessary for CPSs.III.R EASEARCH P ROCESSSince2007,American government has treated CPSs as a new development strategy.Some researchers from various countries discussed the related concepts,technologies, applications and challenges during CPSweek and the international conference on CPS subject[11].The results of this research mainly concentrate in the following respects[7]. A.Energy ControlOne of the features of CPSs is distributed system.Though the vast majority of devices in CPSs need less energy,the energy supply is still a great challenge because the demand and supply of energy is inconvenient.In[12],a control strategy is proposed for realizing best trade-off between satisfying user requests and energy consumption in a data center.In[13-15],these papers concern the basic modeling of cyber-based physical energy systems.A novel cyber-based dynamic model is proposed in which a resulting mathematical model greatly depends on the cyber technologies supporting the physical system.F.M.Zhang et al [16]design optimal and adaptive discharge profile for a square wave impulsive current to achieve maximum battery life.J. Wei et al and C.J.Xue et al[17,18]develop an optimal lazy scheduler to manage services with minimum energy expenditure while not violating time-sensitive constraints.In [19],a peak inlet temperature minimization problem is formulated to improve the energy efficiency.J.R.Cao et al[20] present a clustering architecture in order to obtain good performance in energy efficiency.B.Secure ControlNow,the research for secure control mainly includes key management,identity authentication,etc.In[21],the existing security technologies for CPSs are summarized,and main challenges are proposed.C.Singh et al[22]explore the topic of the reliability assurance of CPSs and possibly stimulate more research in this area.T.T.Gamage et al[23]give a general theory of event compensation as an information flow security enforcement mechanism for CPSs.Then a case study is used to demonstrate this concept.In[24],a certifcateless signature scheme for mobile wireless CPSs is designed and validated.Y.Zhang et al[25]present an adaptive health monitoring and management system model that defines the fault diagnosis quality metrics and supports diagnosis requirement specifications.J.Wei et al[26]exploit message scheduling solutions to improve security quality of wireless networks for mission-critical cyber-physical applications.C.Transmission and ManagementCPSs need to conduct the transmission and management of multi-modal data generated by different sensor devices.In[27], a novel information-centric approach for timely,secure real-time data services in CPSs is proposed.In order to obtain the crucial data for optimal environment abstraction,L.H.Kong et al[28]study the spatio-temporal distribution of CPS nodes.H. Ahmadi et al[29]present an innovative congestion control mechanism for accurate estimation of spatio-temporal phenomena in wireless sensor networks performing monitoring applications.A dissertation on CPSs discusses the design, implementation,and evaluation of systems and algorithms that enable predictable and scalable real-time data services for CPS applications[30].Now,the exiting results are still rare,and there are many facets to be studied.D.Model-based Software DesignNow,the main model-based software design methods include Model Driven Development(MDD)(e.g.UML), Model-Integrated Computing(MIC),Domain-Specific Modeling(DSM),etc[31,32].An example,abstractions in the design flow for DSM,is shown in Figure2.These methods have been widely applied to the embedded system design[34, 35].On the basis of these,some researchers conduct model-based software design for CPSs in the following aspects:event model,physical model,reliability and real-time assurance,etc.Figure2.Abstractions in the design flow for DSM[33]1)Event model.E.A.Lee et al[36]make a case that the time is right to introduce temporal semantics into programming models for CPSs.A programming model called programming temporally-integrated distributed embedded systems(PTIDES) provides a coordination language rooted in discrete-event semantics,supported by a lightweight runtime framework and tools for verifying concurrent software components.In[37],a concept lattice-based event model for CPSs is proposed.This model not only captures the essential information about events in a distributed and heterogeneous environment,but it alsoPlatform mapping Abstractions are linkedthrough refinementrelationsAbstraction layers allowthe verification ofdifferent propertiesPlatform mappingAbstraction layersdefine platformsallows events to be composed across different boundaries of different components and devices within and among both cyber and physical domains.In addition,A CPS architecture along with a novel event model for CPS is developed[38].2)Physical model.In[39],a methodology for automatically abstracting models of CPSs is proposed.The models are described using a user-defined language inspired by assembly code.For mechanical systems,Y.Zhu et al[40]show how analytical models of a particular class of physical systems can be automatically mapped to executable simulation codes.S.Jha et al[41]present a new approach to assist designers by synthesizing the switching logic,given a partial system model, using a combination of fixpoint computation,numerical simulation,and machine learning.This technique quickly generates intuitive system models.3)Reliability and real-time assurance. E. A.Lee[42] emphasizes the importance of security,reliability and real-time assurance in CPSs,and considers the effective orchestration of software and physical processes requires semantic models. From the perspective of soft real-time and hard real-time,U. Kremer[43]conducts the research that the role of time in CPS applications has a fundamental impact on the design and requirements.In CPSs,the heterogeneity causes major challenges for compositional design of large-scale systems including fundamental problems caused by network uncertainties,such as time-varying delay,jitter,data rate limitations,packet loss and others.To address these implementation uncertainties,X.Koutsoukos et al[44]propose a passive control architecture.For improving reliability,T.L. Crenshaw et al[45]describe a simplex reference model to assist developers with CPS architectures which limit fault-propagation.A highly configurable and reusable middleware framework for real-time hybrid testing is provided in[46].Though the model-based software design has an early start, the present development of CPSs progresses at a fast enough rate to provide a competitive challenge.E.Control TechniqueCompared with other control applications,the control technique for CPSs is still at an elementary stage.F.M.Zhang et al[2]develop theoretical results in designing scheduling algorithms for control applications of CPS to achieve balances among robustness,schedulability and power consumption. Moreover,an inverted pendulum as a study object is designed to validate the proposed theory.N.Kottenstette et al[47] describe a general technique:passivity and a particular controller structure involving the resilient power junction.In [48],a design and implementation of CPSs for neutrally controlled artificial legs is proposed.In[49],J.L.Ny et al approach the problem of certifying a digital controller implementation from an input-output,robust control perspective.F.System Resource AllocationUntil now,the relative research for system resource allocation mainly focuses on embedded/real-time systems, networked control systems,WSN,etc[50-52].Towards the complicated CPSs,this work is in the beginning stage.V.Liberatore[53]gives a new train of thought on bandwidth allocation in CPSs.In[54],the model dynamics are presented to express the properties of both software and hardware of CPSs,which is used to do resource allocation.K.W.Li et al [55]research the problem of designing a distributed algorithm for joint optimal congestion control and channel assignment in the multi-radio multi-channel networks for CPSs.The ductility metric is developed to characterize the overload behavior of mixed-criticality CPSs in[56].IV.C LASSIC A PPLICATIONSApplications of CPSs include medical devices and systems, assisted living,traffic control and safety,advanced automotive systems,process control,energy conservation,environmental control avionics and aviation software,instrumentation,critical infrastructure(e.g.power,water),distributed robotics,weapons systems,manufacturing,distributed sensing command and control,smart structures,biosystems,communications systems, etc.[9,10].The classic application architecture of CPSs is described in[38].Now,some application cases for CPSs have been conducted in[57-64].Here,three examples(Health Care and Medicine,Intelligent Road and Unmanned Vehicle,and Electric Power Grid)are used to illuminate the classic applications of CPSs[8,9].A.Health Care and MedicineThe domain of health care and medicine includes national health information network,electronic patient record initiative, home care,operating room,etc.some of which are increasingly controlled by computer systems with hardware and software components,and are real-time systems with safety and timing requirements.A case of CPSs,an operating room,is shown in Figure3.Figure3.A case of CPSs:An operating room[8,9]B.Electric Power GridThe power electronics,power grid,and embedded control software form a CPS,whose design is heavily influenced by fault tolerance,security,decentralized control,and economic/ ethical social aspects[65].In[8,9],a case of CPSs,electric power grid,is given as shown in Figure4.Figure4.A case of CPSs:Electric power grid[8,9]C.Integrate Intelligent Road with Unmanned VehicleWith the development of sensor network,embedded systems,etc.some new solutions can be applied to unmanned vehicle.We are conducting a program that intelligent road and unmanned vehicle are integrated in the form of CPSs.Figure5 shows another case of CPSs:Integrate intelligent road with unmanned vehicle.Figure5.A case of CPSs:Integrate intelligent road with unmanned vehicleV.R ESEARCH C HALLENGESCPSs as a very active research field,a variety of questions need to be solved,at different layers of the architecture and from different aspects of systems design,to trigger and to ease the integration of the physical and cyber worlds[66].In[10, 42,66-68],the research challenges are mainly summarized as follows:1)Control and hybrid systems.A new mathematical theory must merge event-based systems with time-based systems for feedback control.This theory also must be suitable for hierarchies involving asynchronous dynamics at different time scales and geographic scope.2)Sensor and mobile networks.In practical applications, the need for increased system autonomy requires self-organizing/reorganizing mobile networks for CPSs.Gathering and refining critical information from the vast amount of raw data is essential.3)Robustness,reliability,safety,and security.It is a critical challenge because uncertainty in the environment,security attacks,and errors in physical devices make ensuring overall system robustness,security,and safety.Exploiting the physical nature of CPS by leveraging location-based,time-based and tag-based mechanisms is to realize security solutions.4)Abstractions.This aspect includes real-time embedded systems abstractions and computational abstractions,which needs new resource allocation scheme to ensure that fault tolerance,scalability,optimization,etc.are achieved.New distributed real-time computing and real-time group communication methods are needed.In addition,the physical properties also should be captured by programming abstractions.5)Model-based development.Though there several existing model-based development methods,they are far from meeting demands in puting and communications,and physical dynamics must be abstracted and modeled at different levels of scale,locality,and time granularity.6)Verification,validation,and certification.The interaction between formal methods and testing needs to be established. We should apply the heterogeneous nature of CPS models to compositional verification and testing methods.VI.C ONCLUSIONSIn the last few years,this emerging domain for CPSs has been attracting the significant interest,and will continue for the years to come.In spite of rapid evolution,we are still facing new difficulties and severe challenges.In this literature, we concisely review the existing research results that involve energy control,secure control,model-based software design transmission and management,control technique,etc.On this basis,some classic applications used to show the good prospects.Then,we propose several research issues and encourage more insight into this new field.A CKNOWLEDGMENTThe authors would like to thank the National Natural Science Foundation of China(No.50875090,50905063), National863Project(No.2009AA4Z111),Key Science and Technology Program of Guangdong Province(No. 2010B010700015),China Postdoctoral Science Foundation (No.20090460769)and Open Foundation of Guangdong Key Laboratoryof Modern Manufacturing Technology(No. GAMTK201002)for their support in this research.R EFERENCES[1]Available at:/cps/.[2] F.M.Zhang,K.Szwaykowska,W.Wolf,and V.Mooney,“Taskscheduling for control oriented requirements for Cyber-Physical Systems,”in Proc.of2008Real-Time Systems Symposium,2005,pp.47-56.[3]Available at:/news/17248-nsf-funds-cyber-physical-systems-project/.[4]J.Sprinkle,U.Arizona,and S.S.Sastry,“CHESS:Building a Cyber-Physical Agenda on solid foundations,”Presentation Report,Apr2008.[5]Available at:/.[6]Available at:/gdcps.html.[7]J.Z.Li,H.Gao,and B.Yu,“Concepts,features,challenges,andresearch progresses of CPSs,”Development Report of China Computer Science in2009,pp.1-17.[8]R.Rajkumar,“CPS briefing,”Carnegie Mellon University,May2007.[9] B.H.Krogh,“Cyber Physical Systems:the need for new models anddesign paradigms,”Presentation Report,Carnegie Mellon University. [10] B.X.Huang,“Cyber Physical Systems:A survey,”Presentation Report,Jun2008.[11]Available at:/.[12]L.Parolini,N.Toliaz,B.Sinopoli,and B.H.Krogh,“A Cyber-PhysicalSystems approach to energy management in data centers,”in Proc.of First International Conference on Cyber-Physical Systems.April2010, Stockholm,Sweden.[13] F.M.Zhang,Z.W.Shi,and W.Wolf,“A dynamic battery model forco-design in cyber-physical systems,”in Proc.of29th IEEE International Conference on Distributed Computing Systems Workshops.2009.[14]M.D.Ilić,L.Xie,U.A.Khan,et al.“Modeling Future Cyber-PhysicalEnergy Systems,”in Proc.of Power and Energy Society General Meeting-Conversion and Delivery of Electrical Energy in the21st Century,2008.[15]M.D.Ilić,L.Xie,U.A.Khan,et al.“Modeling of future Cyber–Physical Energy Systems for distributed sensing and control,”IEEE Transactions on Systems,Man,and Cybernetics-Part A:Systems and Humans,Vol.40,2010,pp.825-838.[16] F.M.Zhang,and Z.W.Shi,“Optimal and adaptive battery dischargestrategies for Cyber-Physical Systems,”in Proc.of Joint48th IEEE Conference on Decision and Control,and28th Chinese Control Conference,2009,Shanghai,China.[17]W.Jiang,G.Z.Xiong,and X.Y.Ding,“Energy-saving servicescheduling for low-end Cyber-Physical Systems,”in Proc.of The9th International Conference for Young Computer Scientists,2008.[18] C.J.Xue,G.L.Xing,Z.H.Yuan,et al.“Joint sleep scheduling andmode assignment in Wireless Cyber-Physical Systems,”in Proc.of29th IEEE International Conference on Distributed Computing Systems Workshops,2009.[19]Q.H.Tang,S.K.S.Gupta,and G.Varsamopoulos,“Energy-efficientthermal-aware task scheduling for homogeneous high-performance computing data centers:A cyber-physical approach,”IEEE Transactions on Parallel and Distributed Systems,Vol.19,2008,pp.1458-1472. [20]J.R.Cao,and H.A.Li,“Energy-efficient structuralized clustering forsensor-based Cyber Physical Systems,”in Proc.of Symposia and Workshops on Ubiquitous,Autonomic and Trusted Computing,2009. [21] A. A.Cárdenas,S.Amin,and S.Sastry,“Secure control:towardssurvivable Cyber-Physical Systems,”in Proc.of The28th International Conference on Distributed Computing Systems Workshops,2008. [22] C.Singh,and A.Sprintson,“Reliability assurance of Cyber-PhysicalPower Systems,”in Conference Proc.,2010.[23]T.T.Gamage,B.M.McMillin,and T.P.Roth,“Enforcing informationflow security properties in Cyber-Physical Systems:A generalized framework based on compensation,”in Proc.of34th Annual IEEE Computer Software and Applications Conference Workshops,2010. [24]Z.Xu,X.Liu,G.Q.Z,et al.“A cert ificateless signature scheme formobile wireless Cyber-Physical Systems,”in Proc.of The28th International Conference on Distributed Computing Systems Workshops, 2008.[25]Y.Zhang,I.L.Yen,F.B.Bastani,et al.“Optimal adaptive systemhealth monitoring and diagnosis for resource constrained Cyber-Physical Systems,”in Proc.of20th International Symposium on Software Reliability Engineering,2009.[26]W.Jiang,W.H.Guo,and N.Sang,“Periodic real-time messagescheduling for confidentiality-aware Cyber-Physical System in wireless networks,”in Proc.of Fifth International Conference on Frontier of Computer Science and Technology,2010.[27]K.D.Kang,and S.H.Son,“Real-time data services for Cyber PhysicalSystems,”in Proc.of28th International Conference on Distributed Computing Systems Workshops,2008.[28]L.H.Kong,D.W.Jiang,and M.Y.Wu,“Optimizing the spatio-temporal distribution of Cyber-Physical Systems for environment abstraction,”in Proc.of International Conference on Distributed Computing Systems,2010.[29]H.Ahmadi,T.F.Abdelzaher,and I.Gupta,“Congestion control forspatio-temporal data in Cyber-Physical Systems,”in Proc.of the1st ACM/IEEE International Conference on Cyber-Physical Systems,2010.[30]W.Kang,“Adaptive real-time data management for Cyber-PhysicalSystems,”PhD Thesis,University of Virginia,2009.[31]Z.M.Song,“Devlopment method of embedded equipment controlsystems based on Model Integrated Computing,”PhD Thesis,South China University of Technology,2007.[32]Available at:/research/MIC.[33]J.Sztipanovits,“Cyber Physical Systems:New challenges for model-based design,”Presentation Report,Vanderbilt University,Apr2008. [34] F.Li,D.Li,J.F.Wan,et al.“Towards a component-based modelintegration approach for embedded computer control system,”in Proc.of International Conference on Computational Intelligence and Security, 2008.[35] D.Li,F.Li,and X.Huang,et al.“A model based integration frameworkfor computer numerical control system development,”Robotics and Computer-Integrated Manufacturing,Vol.26,2010,pp.848-860. [36] E.A.Lee,S.Matic,S.A.Seshia,et al.“The case for timing-centricdistributed software,”in Proc.of29th IEEE International Conference on Distributed Computing Systems Workshops,2009.[37]Y.Tan,M.C.Vuran,and S.Goddard,“A concept lattice-based eventmodel for Cyber-Physical Systems,”in Proc.of CCPS,Apr2010, Stockholm,Sweden.[38]Y.Tan,M.C.Vuran,and S.Goddard,“Spatio-temporal event model forCyber-Physical Systems,”in Proc.of29th IEEE International Conference on Distributed Computing Systems Workshops,2009. [39]R.A.Thacker,K.R.Jones,C.J.Myers,et al.“Automatic abstractionfor verification of Cyber-Physical Systems,”in Proc.of CCPS,Apr2010, Stockholm,Sweden.[40]Y.Zhu, E.Westbrook,J.Inoue,et al.“Mathematical equations asexecutable models of mechanical systems,”in Proc.of CCPS,Apr2010, Stockholm,Sweden.[41]S.Jha,S.Gulwani,S.A.Seshia,et al.“Synthesizing switching logic forsafety and dwell-time requirements,”in Proc.of CCPS,Apr2010, Stockholm,Sweden.[42] E.A.Lee,“Cyber Physical Systems:Design challenges,”in Proc.ofISORC,May,2008,Orlando,USA.[43]U.Kremer,“Cyber-Physical Systems:A case for soft real-time,”Available at:/.[44]X.Koutsoukos,N.Kottenstette,J.Hall,et al.“Passivity-based controldesign for Cyber-Physical Systems,”Available at:http://citeseerx.ist./.[45]T.L.Crenshaw, E.Gunter, C.L.Robinson,et al.“The simplexreference model:Limiting fault-propagation due to unreliable components in Cyber-Physical System architectures,”in Proc.of IEEE International Real-Time Systems Symposium,2008.[46]T.Tidwell,X.Y.Gao,H.M.Huang,et al.“Towards configurable real-time hybrid structural testing:A Cyber-Physical Systems approach,”in Proc.of IEEE International Symposium on Object/Component/Service-Oriented Real-Time Distributed Computing,2009.[47]N.Kottenstette,G.Karsai,and J.Sztipanovits,“A passivity-basedframework for resilient Cyber Physical Systems,”in Proc.of2nd International Symposium on Resilient Control Systems,2009.[48]H.Huang,Y.Sun,Q.Yang,et al.“Integrating neuromuscular and CyberSystems for neural control of artificial legs,”in Proc.of CCPS,Apr 2010,Stockholm,Sweden.[49]J.L.Ny,and G.J.Pappas,“Robustness analysis for the certification ofdigital controller implementations,”in Proc.of CCPS,Apr2010, Stockholm,Sweden.[50]J.F.Wan,D.Li,and P.Zhang,“Key technology of embedded systemimplementation for software-based CNC system,”Chinese Journal of Mechanical Engineering,Vol.23,2010,pp.241-248.[51]J.F.Wan,D.Li,H.H.Yan,and P.Zhang,“Fuzzy feedback schedulingalgorithm based on central processing unit utilization for a software-based computer numerical control system,”Journal of Engineering Manufacture,Vol.224,2010,pp.1133-1143.[52]J.F.Wan,and D.Li,“Fuzzy feedback scheduling algorithm based onoutput jitter in resource-constrained embedded systems,”In Proc.of International Conference on Challenges in Environmental Science and Computer Engineering,March2010,Wuhan,China.[53]V.Liberatore,“Bandwidth allocation in sense-and-respond systems,”Report,Available at:/~vxl11/NetBots/.[54]M.Lindberg,and K.E.Årzén,“Feedback control of cyber-physicalsystems with multi resource dependencies and model uncertainties,”in Proc.of the31st IEEE Real-Time Systems Symposium,Dec2010. [55]K.W.Li,Q.W.Liu,F.R.Wang,et al.“Joint optimal congestioncontrol and channel assignment for multi-radio multi-channel wireless networks in Cyber-Physical Systems,”in Proc.of Symposia and Workshops on Ubiquitous,Autonomic and Trusted Computing,2009. [56]kshmanan,D.Niz,R.Rajkumar,et al.“Resource allocation indistributed mixed-criticality Cyber-Physical Systems,”in Proc.of International Conference on Distributed Computing Systems,2010. [57] D.Dragomirescu,“Cyber-Physical Systems for aeronautic applications,”Presentation Report,2010,University of Toulouse,France.[58] A.M.K.Cheng,“Cyber-Physical Medical and Medication Systems,”inProc.of the28th International Conference on Distributed Computing Systems Workshops,2008.[59]T.Dillon,and E.Chang,“Cyber-Physical Systems as an embodiment ofdigital ecosystems,”in Proc.of4th IEEE International Conference on Digital Ecosystems and Technologies,2010.[60]J.Madden,B.McMillin,and A.Sinha,“Environmental obfuscation of aCyber Physical System-Vehicle example,”in Proc.of34th Annual IEEE Computer Software and Applications Conference Workshops,2010. [61]I.Lee,and O.Sokolsky,“Medical Cyber Physical Systems,”in Proc.ofDAC,2010,Anaheim,California,USA.[62]W.Harrison,J.Moyne,and D.Tilbury,“Virtual fusion:The completeintegration of simulated and actual,”Presentation Report,2008, University of Michigan,USA.[63]M.Li,Y.H.Liu,J.L.Wang,et al.“Sensor network navigation withoutlocations,”in Proc.of IEEE INFOCOM,2009.[64]G.L.Xing,W.J.Jia,Y.F.Du,et al.“Toward ubiquitous video-basedCyber-Physical Systems,”in Proc.of IEEE International Conference on Systems,Man and Cybernetics,2008.[65] B.McMillin,C.Gill,M.L.Crow,et al,“Cyber-Physical Systemsdistributed control-The advanced electric power grid,”Available at: /.[66]L.Sha,S.Gopalakrishnan,X.Liu,et al.“Cyber-Physical Systems:Anew frontier,”in Proc.of IEEE International Conference on Sensor Networks,Ubiquitous,and Trustworthy Computing,2008.[67]M.Broy,“Cyber-Physical Systems:Technological&scientificchallenges,”Presentation Report,2010.[68]R.Rajkumar,I.Lee,L.Sha,et al.“Cyber-Physical Systems-The nextcomputing revolution,”in Proc.of Design Automation Conference,2010, Anaheim,California,USA.。
《分布式计算系统》课程教学大纲
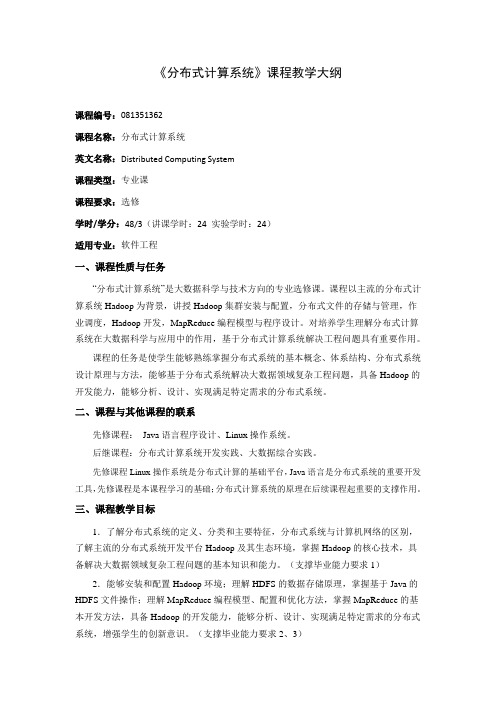
《分布式计算系统》课程教学大纲课程编号:081351362课程名称:分布式计算系统英文名称:Distributed Computing System课程类型:专业课课程要求:选修学时/学分:48/3(讲课学时:24 实验学时:24)适用专业:软件工程一、课程性质与任务“分布式计算系统”是大数据科学与技术方向的专业选修课。
课程以主流的分布式计算系统Hadoop为背景,讲授Hadoop集群安装与配置,分布式文件的存储与管理,作业调度,Hadoop开发,MapReduce编程模型与程序设计。
对培养学生理解分布式计算系统在大数据科学与应用中的作用,基于分布式计算系统解决工程问题具有重要作用。
课程的任务是使学生能够熟练掌握分布式系统的基本概念、体系结构、分布式系统设计原理与方法,能够基于分布式系统解决大数据领域复杂工程问题,具备Hadoop的开发能力,能够分析、设计、实现满足特定需求的分布式系统。
二、课程与其他课程的联系先修课程:Java语言程序设计、Linux操作系统。
后继课程:分布式计算系统开发实践、大数据综合实践。
先修课程Linux操作系统是分布式计算的基础平台,Java语言是分布式系统的重要开发工具,先修课程是本课程学习的基础;分布式计算系统的原理在后续课程起重要的支撑作用。
三、课程教学目标1.了解分布式系统的定义、分类和主要特征,分布式系统与计算机网络的区别,了解主流的分布式系统开发平台Hadoop及其生态环境,掌握Hadoop的核心技术,具备解决大数据领域复杂工程问题的基本知识和能力。
(支撑毕业能力要求1)2.能够安装和配置Hadoop环境;理解HDFS的数据存储原理,掌握基于Java的HDFS文件操作;理解MapReduce编程模型、配置和优化方法,掌握MapReduce的基本开发方法,具备Hadoop的开发能力,能够分析、设计、实现满足特定需求的分布式系统,增强学生的创新意识。
(支撑毕业能力要求2、3)3. 结合实际应用设置实验项目,按照软件工程的要求进行项目的分析、设计、开发和测试,培养学生的分布式系统的工程实践能力。
分布式系统及云计算概论

分布式系统及云计算概论English Response:What is Distributed Systems and Cloud Computing?Distributed systems are systems that consist ofmultiple computers connected by a network. Each computer in a distributed system has its own local memory and processing capabilities, and the computers in the system communicate with each other in order to complete tasks. Cloud computing is a type of distributed computing that allows users to access computing resources over the internet. These resources can include servers, storage, databases, and applications.Benefits of Distributed Systems.Scalability: Distributed systems can be easily scaled up or down to meet the needs of the users. This makes them a good choice for applications that have unpredictable orfluctuating workloads.Reliability: Distributed systems are more reliable than centralized systems because they have no single point of failure. If one computer in a distributed system fails, the other computers can continue to operate.Availability: Distributed systems are more available than centralized systems because they can be accessed from anywhere in the world. This makes them a good choice for applications that need to be available 24/7.Performance: Distributed systems can provide better performance than centralized systems because the workload can be distributed across multiple computers. This can lead to faster processing times and reduced latency.Benefits of Cloud Computing.Cost Savings: Cloud computing can help businesses save money on IT costs. This is because cloud computing providers offer a variety of pricing models that allowusers to only pay for the resources they use.Scalability: Cloud computing is a scalable solution that can be easily scaled up or down to meet the needs of the business. This makes it a good choice for businesses that have unpredictable or fluctuating workloads.Reliability: Cloud computing providers offer a high level of reliability, with guaranteed uptime and data protection. This makes cloud computing a good choice for businesses that need to run their applications reliably.Flexibility: Cloud computing is a flexible solution that can be used for a variety of purposes. Businesses can use cloud computing to run their own applications, or they can use cloud computing to access applications and services from other providers.Conclusion.Distributed systems and cloud computing are two important technologies that can help businesses improvetheir IT operations. Distributed systems provide scalability, reliability, availability, and performance, while cloud computing provides cost savings, scalability, reliability, and flexibility.Chinese Response:分布式系统和云计算概论。
The Chubby lock service for loosely-coupled distributed systems - Riivo Kikas

Riivo Kikas
Chubby lock
Introduction Paxos Chubby Conclusions
Paxos algorithm Algorithmic challenges Software engineering
Snapshots
Replicated log will be growing continuously Log is typically a sequence of operations to be applied to some data structure Can snapshot the data structure directly When a client taxes a snapshot of the Paxos log, it will truncate replicas log by deleting log entries that precede the snapshot
Riivo Kikas
Chubby lock
Introduction Paxos Chubby Conclusions
Paxos algorithm Algorithmic challenges Software engineering
Epoch numbers
Requests are directed to a master replica From the time when the master replica receives the request to the moment the request causes an update of the underlying database, the replica may have lost its master status Chubby requires an incoming request to be aborted if mastership is lost and/or re-acquired during the handling of the request Two requests for the epoch number at the master replica receive the same value iff that replica was master continuously for the time interval between the two requests
计算机组成原理英文缩写
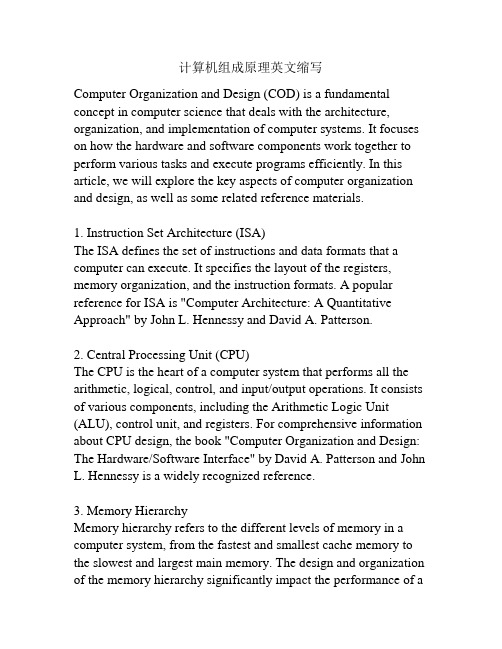
计算机组成原理英文缩写Computer Organization and Design (COD) is a fundamental concept in computer science that deals with the architecture, organization, and implementation of computer systems. It focuses on how the hardware and software components work together to perform various tasks and execute programs efficiently. In this article, we will explore the key aspects of computer organization and design, as well as some related reference materials.1. Instruction Set Architecture (ISA)The ISA defines the set of instructions and data formats that a computer can execute. It specifies the layout of the registers, memory organization, and the instruction formats. A popular reference for ISA is "Computer Architecture: A Quantitative Approach" by John L. Hennessy and David A. Patterson.2. Central Processing Unit (CPU)The CPU is the heart of a computer system that performs all the arithmetic, logical, control, and input/output operations. It consists of various components, including the Arithmetic Logic Unit (ALU), control unit, and registers. For comprehensive information about CPU design, the book "Computer Organization and Design: The Hardware/Software Interface" by David A. Patterson and John L. Hennessy is a widely recognized reference.3. Memory HierarchyMemory hierarchy refers to the different levels of memory in a computer system, from the fastest and smallest cache memory to the slowest and largest main memory. The design and organization of the memory hierarchy significantly impact the performance of acomputer system. "Modern Operating Systems" by Andrew S. Tanenbaum and Herbert Bos is a valuable reference for understanding memory management.4. Input/Output (I/O) DevicesI/O devices allow computers to communicate with the external world. These devices include keyboards, mice, monitors, printers, and network interfaces. The book "Principles of Computer System Design: An Introduction" by Jerome H. Saltzer, M. Frans Kaashoek, and David P. Reed provides detailed information about the design and implementation of I/O systems.5. MicroarchitectureMicroarchitecture refers to the implementation details of a specific processor, including the organization of the pipeline, cache hierarchy, and branch prediction mechanisms. "Computer Architecture: Concepts and Evolution" by Gerrit A. Blaauw and Frederick P. Brooks Jr. is a comprehensive reference for microarchitecture.6. Parallel ProcessingParallel processing involves running multiple instructions or tasks simultaneously to improve overall system performance. "Computer Architecture: A Quantitative Approach" by John L. Hennessy and David A. Patterson provides in-depth information about parallel processing techniques, including multi-core processors and parallel programming models.7. PipeliningPipelining is a technique used to increase instruction throughput bydividing the execution of instructions into a series of overlapping stages. This technique enables concurrent execution of multiple instructions. "Computer Organization and Design: The Hardware/Software Interface" by David A. Patterson and John L. Hennessy extensively covers pipelining concepts and its impact on computer performance.8. Distributed SystemsDistributed systems involve multiple interconnected computers that work together to achieve a common goal. Designing efficient and reliable distributed systems requires knowledge of computer organization principles. "Distributed Systems: Concepts and Design" by George Coulouris, Jean Dollimore, Tim Kindberg, and Gordon Blair is a popular reference for understanding distributed systems.In conclusion, computer organization and design are crucial areas in computer science that involve various aspects, including instruction set architecture, CPU design, memory hierarchy, I/O devices, microarchitecture, parallel processing, pipelining, and distributed systems. The aforementioned references provide comprehensive information on these subjects and serve as valuable resources for anyone interested in learning more about computer organization and design.。
Parallel Processing &Distributed Systems

Khoa Coâng Ngheä Thoâng Tin – Ñaïi Hoïc Baùch Khoa Tp.HCM
Models of Parallel Computation
PRAM BSP Phase Parallel
Khoa Coâng Ngheä Thoâng Tin – Ñaïi Hoïc Baùch Khoa Tp.HCM
Pipeline, Processor Array, Multiprocessor, Data Flow Computer Flynn Classification:
– SISD, SIMD, MISD, MIMD
Speedup:
– Amdahl, Gustafson
Pipeline Computer
begin spawn (P0, P1,…, Pn/2 -1) for all Pi where 0 ≤ i ≤ n/2 -1 do for j ← 0 to log n – 1 do if i modulo 2j = 0 and 2i+2j < n the A[2i] ← A[2i] + A[2i+2j] endif endfor endfor end
Khoa Coâng Ngheä Thoâng Tin – Ñaïi Hoïc Baùch Khoa Tp.HCM
Conflicts Resolution Schemes (1)
PRAM execution can result in simultaneous access to the same location in shared memory.
Khoa Coâng Ngheä Thoâng Tin – Ñaïi Hoïc Baùch Khoa Tp.HCM
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
/~course/cs402 Hongfei Yan School of EECS, Peking University 6/24/2008
Refer to Aaron Kimball’s slides
Distributed Problems
Rendering multiple frames of high-quality animation
Image: DreamWorks Animation
Distributed Problems
Simulating several hundred or thousand characters
– For external interconnect networks in particular
Vector Processing
Cray 1 (1976) allowed programmers to apply operations to large chunks of data at a time
SIMD architecture: Single instruction, multiple data
A Brief History… 1985-95
“Massively parallel architectures” start rising in prominence Message Passing Interface (MPI) and other libraries developed Bandwidth was a big problem
Loop Compilation
for (i = 0; i < N; i++) { a[i] = b[i] + c[i]; } top: compare i, N
jge exit load_offset $1, b, i load_offset $2, c, i add $3, $1, $2 store_offset $3, a, i inc i jmp top
Outline
Introduction Models of computation A brief history lesson Connecting distributed modules Failure & reliability
Moore’s Law
Computer Speedup
Moore’s Law: “The density of transistors on a chip doubles every 18 months, for the same cost” (1965)
Image: Tom’s Hardware
Scope of Problems
What can you do with 1 computer? What can you do with 100 computers? What can you do with an entire data center?
System Organization
Having one big memory would make it a huge bottleneck
– Eliminates all of the parallelism
The Parallel RAM Model (PRAM) does not work
Cray 2 supercomputer (Wikipedia)
Oቤተ መጻሕፍቲ ባይዱtline
Introduction Models of computation A brief history lesson Connecting distributed modules Failure & reliability
Models of Computing
Memory (Code and Data)
Instructions
Data I/O with external world
CPU
The Von Neumann architecture a.k.a. RAM model … How do we extend this to parallel computing?
Outline
Introduction Models of computation A brief history lesson Connecting distributed modules Failure & reliability
Taking A Step Back
Before we talk more about distributed computing… what does it mean to design “a computer?” How would a distributed or parallel system look different from a single-CPU machine?
Happy Feet Kingdom Feature Productions; Lord of the Rings New Line Cinema
Distributed Problems
Indexing the web (Google) Simulating an Internet-sized network for networking experiments (PlanetLab) Speeding up content delivery (Akamai)
– Lock-step execution too restrictive – Does not accurately model memory
CTA: Memory is Distributed
Local RAM Local RAM Local RAM Local RAM
I
D
I
D
I
D
I
D
Local cache
A First Try: PRAM
Parallel Random Access Machine model: N processors connected to shared memory All memory addresses reachable in unit time by any CPU All processors execute one instruction per tick in “lock step”
What is the key attribute that all these examples have in common?
Distributed Problems
All involve separable computation Many involve data that necessarily must be stored in multiple locations. For a problem to be distributable, different components of the problem should be able to be handled independently.
SISD
Refers to an architecture in which a single processor, an uniprocessor, executes a single instruction stream, to operate on data stored in a single memory.
SMP: Intel Core2Duo
Shared L2 cache, snooping MESI(Modified, Exclusive, Shared and Invalid) coherence protocol
Outline
Introduction Models of computation A brief history lesson Connecting distributed modules Failure & reliability
Early Parallel Computing
CDC 6600: Out-of-order execution (1964) CDC 7600: Pipelining CDC 8600: Multi-core! 4 7600’s in one box
– Provided lock-step execution of CPUs – … Also never actually made it to production
– Corresponds to the von Neumann architecture.
SIMD
Single Instruction Stream-Multiple Data Stream Two architectures fit this category
– Pipelined vector processors (e.g. Cray-1) – Processor array (e.g. Connection Machine CM1, CM2, MasPer MP-1 and MP-2)
exit:
Vector Compilation
for (i = 0; i < N; i++) { a[i] = b[i] + c[i]; } load_vector $1, b, N load_vector $2, c, N add $3, $1, $2 store_vector $3, a, N
MIMD
Multiple autonomous processors simultaneously executing different instructions on different data.