3_RRS柔性并联机器人的振动特性分析_刘善增
基于ANSYS的3-RPS型柔顺并联机构的运动仿真
SCIENTIST90 柔顺并联机构[1]是通过部分或整体柔性杆件的弹性变形来产生位移和传递运动、力或能量的机构,是将并联机构和柔性机构优点的有机结合。
1983年Hunt 提出3-RPS 型并联机构的构型和相关理论。
Lee 将这种机构应用于微动机器人;黄真[2]等于1996年根据螺旋理论探究了该机构的运动学特征,建立了运动学及动力学模型。
本文根据3-RPS 型并联机构的运动特性,在并联机构的基础上设计柔顺并联机构,利用ANSYS 软件分析柔顺并联机构的运动特性及运动的数量级,为柔顺并联机构用于微动平台提供理论研究。
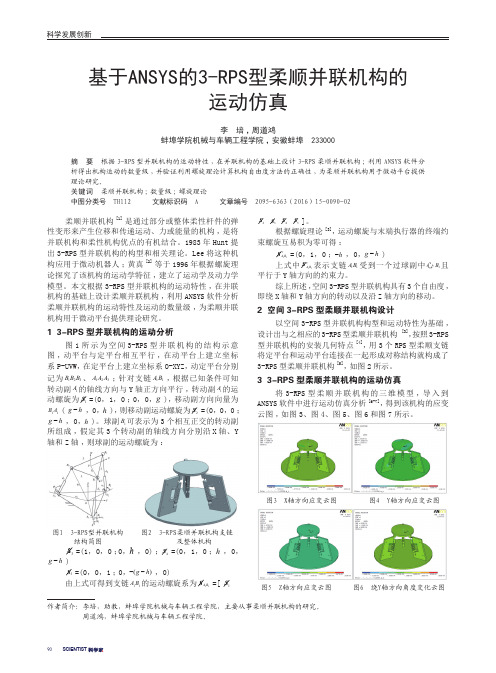
1 3-RPS 型并联机构的运动分析图1所示为空间3-RPS 型并联机构的结构示意图,动平台与定平台相互平行,在动平台上建立坐标系P-UVW,在定平台上建立坐标系O-XYZ,动定平台分别记为123B B B 、123A A A ;针对支链11A B ,根据已知条件可知转动副1A 的轴线方向与Y 轴正方向平行,转动副1A 的运动螺旋为1S =(0,1,0;0,0,g ),移动副方向向量为11B A (g h −,0,h ),则移动副运动螺旋为2S =(0,0,0;g h −,0,h )。
球副1B 可表示为3个相互正交的转动副所组成,假定其3个转动副的轴线方向分别沿X 轴、Y 轴和Z 轴,则球副的运动螺旋为:图1 3-RPS型并联机构 图2 3-RPS柔顺并联机构支链结构简图 及整体机构3S =(1,0,0;0,h ,0);4S =(0,1,0;h ,0,g h −)5S =(0,0,1;0,()g h −−,0)由上式可得到支链11A B 的运动螺旋系为11A B S =[1S 2S 3S 4S 5S ]。
根据螺旋理论[3],运动螺旋与末端执行器的终端约束螺旋互易积为零可得:11r A B S =(0,1,0;h −,0,g h −)上式中11rA B S 表示支链11A B 受到一个过球副中心1B 且平行于Y 轴方向的约束力。
3自由度并联机器人的运动学与动力学分析_刘善增

第 45 卷第 8 期 2009 年 8 月
机械工程学报
JOURNAL OF MECHANICAL ENGINEERING
Vo l . 4 5 N o . 8 Aug. 2009
DOI:10.3901/JME.2009.08.011
3 自由度并联机器人的运动学与动力学分析*
刘善增 1, 2 余跃庆 1 佀国宁 1 杨建新 1 苏丽颖 1
(1. 北京工业大学机械工程与应用电子技术学院 北京 100124; 2. 中国矿业大学机电学院 徐州 221116)
1 3-RRS 并联机器人的运动学分析
一种空间 3 自由度并联机器人的结构简图,如 图 1 所示。它由一个动平台 P1P2P3,三条支链 BiCiPi(i=1, 2, 3)和一个静平台(基座)B1B2B3 组成。其 中,动平台通过球面副(S 副)与各支链连接,静平台 通过转动副(R 副)与各支链连接,且 Bi 处转动副的 轴线与 Ci(i=1, 2, 3)处转动副的轴线对应平行。分别 建立与动平台固结的局部(动)坐标系 Pxyz 和系统 (固定)坐标系 OXYZ,如图 1 所示,坐标系的原点 P 和 O 分别位于动平台和静平台的几何中心,轴 z 和 Z 分别垂直于动、静平台向上,轴 x、y 与 X、Y 分 别平行和垂直于上、下平台的边 P2P3 与 B2B3。局部 定坐标系 Bixiyizi (i=1, 2, 3)的 xi 轴与 Bi 处转动副轴线 一致,zi 垂直于静平台 B1B2B3 向上,yi 轴同时垂直 于 xi 和 zi 轴。
海上柔性并联平台空间动力学建模与分析

海上柔性并联平台空间动力学建模与分析谢克峰;张合;刘善增;李豪杰【摘要】针对某海上螺旋副-虎克铰-球铰(HUS)柔性并联平台由快速稳定和大负载引起的支撑连杆弹性变形和负载瞄准位置偏差问题,进行了空间弹性动力学建模.采用模态函数和空间等截面梁单元模型对弹性连杆进行空间建模,基于虎克铰和球铰连接的连杆为两自由度空间运动,推导了空间单元坐标与系统坐标的两自由度转换矩阵,利用平台的运动学和动力学约束条件建立了HUS柔性并联平台的空间弹性动力学方程;运用Newmark方法对弹性动力学方程进行离散求解,分析了平台的弹性动力学响应和支撑连杆的最大动应力,并进行了动力学测试实验;进一步分析了弹性变形对负载瞄准精度的影响.研究结果表明:由弹性变形引起的支撑点最大位移为2.45 mm,且x轴明显大于y轴和z轴;由弹性角位移引起最大位置偏差为1.35 m.实验结果与仿真结果一致,验证了数值建模的有效性.%The space elastic dynamic modelling of parallel platform is created for the elastic deformation and the load pointing displacement error of support link due to the rapid stabilization and large load of offshore HUS flexible parallel platform.Space elastic link is modelled by modal function and space equal section beam element model.The link based on hook joint and ball joint has two degrees of freedom space movement.The transformation matrix of two degrees of freedom between space element coordinate and system coordinate is derived.The kinematic and dynamic constraints of platform are used to establish the space elastic dynamic equations of HUS flexible parallel platform.The elastic dynamic equations are discretely solved by Newmark method.The elastic dynamic response of platform and the maximumdynamic stress of support link are analyzed.And the dynamic test experiment is conducted.The results show that the maximum displacement of support point by elastic deformation is 2.45 mm,and the error of axis xis significantly greater than those of axes y and z.Experimental results are consistent with the simulated results,thereby validating the effectiveness of the numerical model.The influence of elastic deformation on load pointing accuracy is analyzed,and the maximum position error due to elastic angular displacement is 1.35 m.【期刊名称】《兵工学报》【年(卷),期】2017(038)003【总页数】8页(P512-519)【关键词】机械学;柔性并联机构;空间动力学建模;弹性变形;弹性连杆【作者】谢克峰;张合;刘善增;李豪杰【作者单位】南京理工大学智能弹药技术国防重点学科实验室,江苏南京210094;南京理工大学智能弹药技术国防重点学科实验室,江苏南京210094;中国矿业大学机电工程学院,江苏徐州221116;南京理工大学智能弹药技术国防重点学科实验室,江苏南京210094【正文语种】中文【中图分类】TJ610.3+1;TP242.3海上平台从尺寸上可以分为大型平台和小型平台,常见的大型平台有石油钻井平台、风电设备平台等[1-2]。
3-RPS并联机器人动力学分析及模糊控制仿真

3-RPS并联机器人动力学分析及模糊控制仿真严智敏; 徐顺建; 简辉华【期刊名称】《《中北大学学报(自然科学版)》》【年(卷),期】2019(040)006【总页数】6页(P537-541,567)【关键词】3-RPS并联机器人; 牛顿-欧拉方法; 动力学分析; Matlab仿真【作者】严智敏; 徐顺建; 简辉华【作者单位】新余学院机电工程学院江西新余 338004【正文语种】中文【中图分类】TP2420 引言目前,随着机器人技术的快速发展,并联机器人因精度高、承载能力强、刚度大等优点,被广泛应用于众多工业生产中,并且在勘探、医学、武器系统等诸多领域中也发挥了非常重要的作用[1]. 但由于并联机器人结构系统非常复杂,具有强耦合、非线性的特点,导致其控制不便,严重影响了并联机器人的控制精度,而与并联机器人控制有最直接关系的是动力学方程的建立[2].机构动力学研究的是机构运动与力之间的关系,范围很广,主要包括分析构件之间的相互受力关系、利用机构的运动学分析进行机构的动力学建模、计算机构的惯性力及动态仿真等[3]. 只有系统地分析机构在某种运动下与构件之间产生的力的相互关系,如不同的力对应机构不同的运动状态,才能更好地对机构进行有效的实时控制[4]. 其中建立数学模型,用数学函数模型代替机构模型作为控制对象,是实现并联机器人控制的基础. 数学模型越精确,对应的控制精度也越高[5]. 动力学模型的优劣直接反映出并联机器人控制精度的高低. 对于同一机构,不同的建模方法对机构控制的作用效果也会有很大的差异[6]. 近年来,国内外学者对并联机器人进行动力学建模的方法主要包括:拉格朗日法(Lagrange)、牛顿-欧拉法(Newton-Euler)、虚功原理法、高斯法(Gauss)等[7]. 本文应用牛顿-欧拉法对3-RPS型并联机器人进行动力学分析,得出该并联机器人的驱动力、约束力矩以及动平台对支链的作用力,建立动力学方程,在此基础上,应用Matlab构建仿真模型进行仿真分析,验证其精度及方法的正确性,为研究3-RPS并联机器人驱动位移轨迹跟踪控制作铺垫.1 机构描述3-RPS并联机构示意图如图 1 所示,该机构由上下两平台、 3支链连接组成,每条支链包涵三个运动副:转动副、移动副、球副. 转动副与固定平台相联,球副与动平台相联,中间通过移动副连接,该机构的驱动副为移动副.图 1 3-RPS机构示意图Fig.1 Schematic diagram of 3-RPS mechanism建立坐标系,上平台建立动坐标系P-UVW,下平台建立固定坐标系O-XYZ,P,O分别为上下平台的中心. 建立支链坐标系Ai-xiyizi,z轴方向为杆长的方向,x 轴方向为OAi的延长线方向,y轴方向由右手定则确定. 上下平台分别记为B1B2B3,A1A2A3,其中,PBi,OAi,OBi分别记为bi,ai,qi,di表示驱动杆AiBi 之间的杆长,φi为连杆AiBi与下平台之间的倾斜角,θi为转动副轴线ui与X轴之间的夹角,L为上平台三角形的边长.2 逆运动学分析2.1 位置分析根据图 2 支链结构示意图,有如下关系式ai+disi=P+bi,(1)式中:si表示在定坐标下zi轴的单位向量.图 2 支链示意图Fig.2 Schematic diagram of the branch则有di=‖P+bi-ai‖,(2)si=(P+bi-ai)/di.(3)在固定坐标系中,支链固定杆和驱动杆质心的位置矢量分别为r1i=ai+e1si,(4)r2i=ai+(di-e2)si,(5)式中:e1,e2如图 2 所示.取欧拉角Z-Y-X型[8],α=0,则动坐标系相对于固定坐标系的方向余弦矩阵为(6)则动平台的角速度为(7)式中:分别为β, γ对时间求导.由图 1 可知,固定坐标系经两次旋转变换可得到支链坐标系Ai-xiyizi, 先绕Z轴旋转φi角,再绕新形成的Y1轴旋转ηi角,则支链坐标系相对固定坐标系的变换矩阵为[9](8)由于转动副的约束作用,支链只能在xizi平面内转动,转轴为yi,则有φi为定值,且φ1=0,φ2=60°,φ3=120°. 由坐标变换有(9)2.2 速度和加速度分析式(1)右边对时间求导得固定坐标系下球副中心Bi的速度为vBi=vp+wp×bi.(10)由于vBi=ARiivBi,则有ivBi=iRAvBi,(11)式中:ivBi表示Bi在Ai-xiyizi坐标系下的速度.式(1)左边对时间求导得(12)式中:iwi, isi分别表示在Ai-xiyizi坐标系下支链的角速度和zi轴的单位向量.对式(12)两边做向量运算并化简,可得(13)由于支链只能绕yi轴转动,则ivBi在yi轴上的分量为零,即ivBiy=0.式(4),式(5)分别对时间求导,并依据上述所求得的值化简可得,在Ai-xiyizi坐标系下支链固定杆和驱动杆质心的速度(14)(15)式中:ivBix,ivBiy,ivBiz分别表示ivBi在xi,yi,zi轴上的分量.再对式(10)求导可得固定坐标系下球副中心Bi的加速度(16)且有(17)对式(12)求导同样也有(18)同理对式(18)两边做向量运算并化简得(19)式(14),式(15)分别对时间求导,并依据上述所求得的值化简可得,Ai-xiyizi坐标系下支链固定杆和驱动杆质心的加速度(20)(21)3 动力学方程的建立以动平台为研究对象,在动坐标系下,根据牛顿-欧拉方程可得动平台的力矩平衡方程[10](22)式中:分别表示动坐标系下,动平台质心所受的合力矩、惯性矩阵、角加速度和角速度; BfBi为该支链对动平台的作用力; BN为动平台所受的外力矩.动平台的力平衡方程[11]为(23)式中:都表示在固定坐标系下的矢量,分别为该支链对动平台的力、系统的重力加速度、动平台所受的外力和动平台的加速度,其中,Ag=[0 0 -g]T.假设ifBi表示在支链坐标系下动平台对支链的作用力,则固定坐标系下和动坐标系下该支链作用于动平台上的力分别为AfBi=ARiifBi,(24)BfBi=BRAAfBi=-BRiifBi.联立式(6), (8), (22), (24)和(25),由于动平台关于其质心的惯性积为零,且Ipu=Ipv,则有(26)(27)biv(a11ifBix+a12ifBiy+a13ifBiz)]+BNPw=(28)式中:右下标中的u,v,w分别表示该量在动坐标系下U,V,W轴上的分量;Ip表示动平台对于其质心的主惯性矩; Bwp=[wpu wpv wpw]表示动坐标系下动平台的角速度矢量.联立式(6), (8), (23), (24)和(25)可得ifBizcos φisin ηi)+AFx=0,(29)ifBizsin φisin ηi)+AFy=0,(30)联立式(26)~(31)可求得ifBiy,ifBiz,根据机构力平衡关系,则有3-RPS并联机器人所需的驱动力和约束力矩分别为(32)Mi=iMAix=diifBiy,(33)式中:iMAix表示在Ai-xiyizi坐标系下动平台作用于该支链下的约束力矩在xi轴上的分量.以支链为研究对象,在支链坐标系下,根据牛顿-欧拉方程有[12](34)式中:inAi,ihAi分别表示在支链坐标系下作用于Ai点的合外力矩和该支链关于Ai点的合角动量.inAi=diisi×(-ifBi)+[m1e1+m2(di-e2)](isi×iRAAg)+iMAi,(35)ihAi=m1e1(isi×iv1i)+m2(di-e2)(is1×iv2i)+iI1iiwi+iI2iiwi,(36)式中:iI1i,iI2i分别表示支链固定杆和驱动杆关于各质心的转动惯量.式(36)对时间求导得(iI2iiwi).(37)联立式(34), (35)和(37)得(38)式中:I1iy,I2iy分别表示支链固定杆和驱动杆关于各自质心的主惯性矩在yi轴上的分量.从而求得动平台对支链的作用力ifBi=[ifBix ifBiy ifbiz]T.4 模糊控制仿真分析为了满足该机构能够实现高精度、快速响应、结构紧凑的运动特点,综合各方面的因素[13],考虑机构实现的是直线运动,对于3-RPS型并联机器人,选择液压伺服驱动作为驱动器,采用液压伺服系统的闭环传递函数[14](39)给定驱动器的参数:KV=0.06,ωh=320,δh=0.2,Vt=1.4×10-4,KCE=6.14×10-12,βe=7×108,A1=4.9×10-4,Ft=1 000,将其代入传递函数中得选用模糊控制方法[15],应用Matlab软件建立控制模型进行仿真分析.应用Matlab的FIS编辑器建立模糊控制器,构建模糊控制模型进行仿真,如图 3 所示.经过多次仿真实验,调节量化因子ke, kec和比例因子ku,使其控制精度达到最佳状态时,ke=0.3×10-3,kec=0.2×10-7,ku=5×107. 仿真时间为10 s,仿真结果如图 4 所示.仿真结果表明:采用模糊控制在轨迹跟踪控制中有一定的控制精度;在系统一开始时就出现迅速响应,运行到0.2 s时就有一定的跟踪精度,并且跟踪的最大误差为1.1 mm,跟踪精度较高;同时验证了采用牛顿-欧拉方法对3-RPS并联机器人动力学分析正确性.图 3 模糊控制仿真模型Fig.3 Simulation model of fuzzy control图 4 模糊控制轨迹跟踪误差Fig.4 Trajectory tracking error of fuzzy control5 结论本文以3-RPS并联机器人的动平台以及各支链为研究对象,应用牛顿-欧拉方法,分析了该并联机器人支链杆件对动平台的驱动力、约束力矩以及动平台对支链的作用力,构建了动力学方程. 基于Matlab仿真软件,采用液压伺服驱动方式及模糊控制算法,构建了模糊控制仿真模型来进行仿真分析,表明采用模糊控制在轨迹跟踪控制中有一定的控制精度,验证了采用牛顿-欧拉方法对3-RPS并联机器人动力学分析的正确性及控制方法的有效性,为进一步采用模糊PID控制、滑膜控制等其它控制方法对3-RPS并联机器人轨迹跟踪控制研究,以及提高并联机器人控制精度提供一定的理论基础.参考文献:【相关文献】[1] 黄真,孔令富,方跃法. 并联机器人机构学理论及控制[M]. 北京:机械工业出版社,1997.[2] 朱大昌. 基于并联支撑机构的车载雷达天线自动调平系统研究[D]. 北京:北京交通大学,2008.[3] 汤腾飞,张俊. 3-PRS并联机器人概念设计与运动特性研究[J]. 机械传动,2019,43(1):35-39.Tang Tengfei, Zhang Jun. Research of conceptual design and kinematic characteristic of a 3-PRS parallel kinematic machine[J]. Journal of Mechanical Transmission, 2019, 43(1):35-39. (in Chinese)[4] 刘保朝,陈能祥. 一种三自由度冗余驱动并联机器人控制研究[J]. 计算机测量与控制,2019,27(1):107-111.Li Baochao, Chen Nengxiang. A three-degree-of-freedom redundant drive parallel robot control research[J]. Computer Measurement & Control, 2019, 27(1):107-111. (in Chinese)[5] 车林仙. 3-PSS/S三转动并联机器人机构的位置分析[J]. 机械传动,2008,32(3):15-17.[6] 梁超,高宏力,彭志文,等. 3-RPS并联机器人动力学分析及控制[J]. 机械设计与制造,2018(9):251-253,257.Liang Chao, Gao Hongli, Peng Zhiwen, et al. Dynamic analysis and control of 3-RPS parallel robot[J]. Machinery Design & Manufacture, 2018(9):251-253,257. (in Chinese)[7] 孟广柱. 3-RRRT并联机器人运动学和动力学建模[D]. 天津:天津理工大学,2009.[8] 李树军,王阴,王晓光. 3-RPS并联机器人机构位置正解的杆长逼近法[J]. 东北大学学报(自然科学版),2001,22(3):285-287.Li Shujun, Wang Yin, Wang Xiaoguang. Forward position analysis of 3-RPS in-parallel manipulator usin g self-modified successive approximation method[J]. Journal of Northeastern University(Natural Science),2001,22(3):285-287. (in Chinese)[9] 刘善增,余跃庆,刘庆波,等. 3-(R)RC并联机器人动力学分析[J]. 机械工程学报,2009,45(5):220-224.Liu Shanzeng, Yu Yueqing, Liu Qingbo, et al. Dynamic analysis of 3-(R)RC parallel manipulator[J]. Journal of Mechanical Engineering, 2009, 45(5):220-224. (in Chinese)[10] 王立华. 3-RRRU并联机器人运动学及动力学建模与仿真[D]. 天津:天津理工大学,2011.[11] 陈文凯. 3-RSR并联机器人运动学和动力学建模及仿真[D]. 南昌:华东交通大学,2006.[12] 姜园,赵新华,杨玉维,等. 基于牛顿-欧拉递推法的3-RRRT并联机器人动力学建模及仿真[J]. 高技术通讯,2016,26(8):780-785.Jiang Yuan, Zhao Xinhua, Yang Yuwei, et al. Modeling and simulation of 3-RRRT parallel manipulator dynamics based on Newton-Euler method[J]. High Technology Letters, 2016,26(8):780-785. (in Chinese)[13] 王涛,朱爱东,陈金兵,等. 气动并联机器人的结构设计及控制[J]. 液压与气动,2019(2):55-60.Wang Tao, Zhu Aidong, Chen Jinbing, et al. Structural design and control of pneumatic parallel robot[J]. Chinese Hydraulics & Pneumatics , 2019(2):55-60. (in Chinese)[14] 任鹏飞,耿世勇. 3-RRR平面并联机器人神经网络滑膜控制研究[J]. 机床与液压,2018,46(15):16-19.Ren Pengfei, Geng Shiyong. Research on neural network sliding mode control for 3-RRR planar parallel robot[J]. Machine Tool & Hydraulics, 2018,46(15):16-19. (in Chinese) [15] 马瑶. 三自由度刚柔藕合并联机器人的设计与研究[D]. 太原:中北大学,2018.。
3_RRS柔性并联机器人的动力学建模与频率特性分析_刘善增

1
动力学建模
3 -RRS 柔 性并联机 器人 的结构 如图 1 所
示 。 静( 下) 平台和动( 上) 平台通过 3 条支链相 · 1219 ·
中国机械工程第 19 卷第 10 期 2008 年 5 月下半月
连 , 设其上下平台均为等边三角形 , 上平台通过球 面副( S 副) 与各连杆连接 , 下平台则通过转动副 ( R 副) 与各连杆连接 , 其中 B i ( i =1 , 2 , 3) 处转动 副的轴线与 Ci 处转动副的轴线对应平行 。 分别建 立与动平台固结的局部坐标系 O P X ′ Y′ Z′ 和系统 ( 固定) 坐标系 OX Y Z 。 坐标系原点 O P 和O 分别位 于上下平台的几何中心 , 轴 Z′ 和 Z 分别垂直于上 下平台 , 轴 X′ 、 Y′ 与X 、 Y 分别平行和垂直于上下 平台的边 P 2 P 3 与 B 2 B 3 。 局部定坐标系B i x′ i1 y′ i1 z′ i1
向) 变 形 和 扭 转 变 形 。 单 元 广 义 坐 标 设 为 δ∈ R18×1 , 它表示单元端点的弹性位 移 、转角和 曲率 , 如图 2 所示 。 这样单元上任意一点相对于单 元坐标系将产生沿轴 x 、 y、 z 的弹性位移 W x ( x, t) 、W y ( x , t) 、 Wz ( x , t) 绕轴 x 、y 、z 的弹性角位移
[ 1-8]
的响应和 连杆末端的振动 。 Pi ras[ 4] 利用有限元 理论与运动弹性动力分析方法 , 研究了具有柔性 杆的 3 -P RR 平面并联机器人的动力学问题 , 分 析了机构位形 、 几何刚度和动力学项对弹性振动 的影响 , 并给出了第一阶模态固有频率随机器人 位形变化的曲线 。 然而 , 针对空间柔性杆件并联 机器人的 动力学建模和 分析的研究还 较少
Delta机器人动力学建模与弹性误差分析
Delta机器人动力学建模与弹性误差分析陈君杰;李攀磊;韩威;许杨剑;王效贵【摘要】针对Delta机器人运动过程中因弹性变形导致的误差问题,基于有限元理论对其弹性动力学问题建立了数学模型并进行了研究.根据机构特点,将机器人的各构件分别划分为刚性体与弹性体,形成了一个刚柔结合的系统,并充分考虑机构中平行四边形机构的运动协调关系,推导出了各构件的运动协调矩阵,由此装配出了系统的弹性动力学方程,在此基础上,采用Newmark积分方法对系统方程进行了求解,最后据此分析了Delta并联机器人杆件截面尺寸对其运动过程中弹性误差的影响.研究结果表明:增加驱动杆截面的尺寸时,其弯曲刚度随之增加,可以减少机器人弹性变形;而从动杆截面的尺寸增加时会因为机构自重增加导致变形增大.%Aiming at the problem of elastic deformation in Delta robot motion,the elastic dynamic model was established based on the finite element theory. According to characteristics of the structure,the components of the robot were divided into rigid parts and flexible parts,re-spectively,which consist of a rigid-flexible coupling system. The motion relation of the parallelogram structure was fully considered,and the motion compatible matrix of each component was deduced. Then the elastic dynamic equation of the system was obtained, on which was based,the influence of the cross-sectional dimension of Delta parallel robot's rods on the elasticity error in motion was analyzed. The results indicate that the bending stiffness increases with the increase of the cross section size of the drive rod,elastic deformation of the robot can be reduced. And the self–weight increases with the increaseof the cross section size of the driven rod,which makes the deformation greater.【期刊名称】《机电工程》【年(卷),期】2018(035)001【总页数】5页(P33-37)【关键词】Delta机器人;有限元方法;弹性动力学【作者】陈君杰;李攀磊;韩威;许杨剑;王效贵【作者单位】浙江工业大学机械工程学院,浙江杭州310014;浙江工业大学机械工程学院,浙江杭州310014;浙江工业大学机械工程学院,浙江杭州310014;浙江工业大学机械工程学院,浙江杭州310014;浙江工业大学机械工程学院,浙江杭州310014【正文语种】中文【中图分类】TH113;TP240 引言1985年,瑞士的Clavel[1]发明了Delta并联机器人,该型机器人为三自由度空间平移机构,具有承载能力强、运动耦合弱、力控制容易等优点。
3-■RC并联机器人动力学分析

3-■RC并联机器人动力学分析刘善增;余跃庆;刘庆波;苏丽颖;佀国宁【期刊名称】《机械工程学报》【年(卷),期】2009(45)5【摘要】对一种空间3自由度并联机器人(3-■RC并联机器人)进行动力学分析。
此并联机器人的机构由一个动平台和一个静平台通过3个同样的转动副—转动副—圆柱副支链组成。
基于Lagrange方程导出3-■RC并联机器人的动力学模型,并分析此并联机器人的动力学特性。
通过一个算例,讨论3-■RC并联机器人的等效转动惯量、驱动力/力矩和能耗的变化规律。
结果表明,对于给定的运动规律,机构位形对系统的等效转动惯量和驱动力/力矩的影响很大。
研究对进一步分析3-■RC并联机器人的动态特性、机构优化设计和系统控制等实际工程应用具有重要意义。
【总页数】5页(P220-224)【关键词】并联机器人;动力学分析;Lagrange方程【作者】刘善增;余跃庆;刘庆波;苏丽颖;佀国宁【作者单位】北京工业大学机械工程与应用电子技术学院;中国矿业大学机电学院【正文语种】中文【中图分类】TH112;TP24【相关文献】1.考虑绳阻尼的绳系并联机器人动力学特性分析 [J], 彭苗娇; 吴惠松; 林麒; 周凡桂; 柳汀; 王晓光2.3-2H2S并联机器人运动学和动力学性能分析 [J], 王才东;崔光珍;王新杰;张朝辉;王良文3.四自由度高速抓取新型并联机器人动力学分析 [J], 宋海霞;宋萌萌;翁伟;何建华;尤燕玲;葛炎风4.一种两自由度5R平面高速并联机器人运动性能及动力学分析 [J], 赵威;姜桂林5.基于螺旋理论的高速并联机器人动力学分析 [J], 吴璞;王宗彦;何晓;景鸿翔;夏长林因版权原因,仅展示原文概要,查看原文内容请购买。
3自由度旋转台的动力学分析

3自由度旋转台的动力学分析高征1肖金壮1王洪瑞1金振林21. 河北大学,保定,0710022. 燕山大学,秦皇岛,066004摘要:对3自由度旋转台进行了动力学分析。
该旋转台只有3个方向的转动自由度, 由2自由度球面并联机构和串联在其上的旋转电机构成。
根据旋转台的几何和运动特性建立了系统的输入输出速度方程, 得出了速度雅克比矩阵和动能方程。
利用拉格朗日法和虚功原理, 建立了系统的动力学模型, 解决了特定外载荷和速度、加速度条件下如何求解驱动力矩的问题。
给出了动力学的仿真运算实例, 讨论了在匀速和匀加速情况下, 2自由度球面并联机构驱动力矩的变化。
最后根据动力学方程, 得出了串联在2自由度球面并联机构上的第三个自由度的力矩与输出转角的运动学方程。
关键词:并联机构;旋转台;动力学;拉格朗日法;虚功原理中图分类号:TP242Dynamic Analysis on A 3-DOF Rotational PlatformGao Zheng1Xiao Jinzhuang1Wang Hongrui1Jin Zhenlin21. Hebei University, Baoding, 0710022. Yanshan University, QinHuangdao, 066004 Abstract: Dynamics is analyzed of a 3-DOF (degree of freedom) rotational platform. This rotational platform, which consists of a 2-DOF spherical parallel mechanism and a rotational degree connecting in series to the platform of the 2-DOF mechanism, has only 3 rotation freedoms. System’s input-and-output velocity functions are established according to rotational platform’s geometry and motion characteristics, and then obtain the velocity Jacobian metrics and energy functions. System’s dynamics model is established by Lagrange method and virtual work principle, and then the drive torque is solved when given the external load, velocities and accelerations. The examples are given of dynamics simulation. The drive torques’ changing curves of the 2-DOF spherical mechanism is discussed under the situation of uniform speed and acceleration. Finally, according to the dynamic functions, the third degree’s kinematics equation is obtained respecting to its torque and output angle.Key words: parallel mechanism; rotation platform; dynamics; Lagrange method; virtual work principle0 前言稳定平台系统是多学科有机结合的产物,其中精密机械动力学建模设计和仿真就是主要的应用技术之一[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2008年第27卷7月第7期机械科学与技术M e c h a n i c a l S c i e n c e a n dT e c h n o l o g y f o r A e r o s p a c e E n g i n e e r i n gJ u l y V o l .272008N o .7收稿日期:20070611基金项目:国家自然科学基金项目(50575002),北京市自然科学基金项目(3062004),北京市教委科技发展计划项目(K M 200610005003)和北京市教委人才强教拔尖人才项目(P H R (I H L B ))资助作者简介:刘善增(1977-),博士研究生,研究方向为机器人学等,l i u s h a n z e n g @163.c o m刘善增3-R R S 柔性并联机器人的振动特性分析刘善增,余跃庆,杜兆才,杨建新(北京工业大学机电学院,北京 100022)摘 要:基于有限元法、L a g r a n g e 方程和运动协调条件,建立了3-R R S 柔性并联机器人的弹性动力学模型。
分析了含有R a y l e i g h 阻尼的3-R R S 柔性并联机器人的振动特性。
通过算例,揭示了系统阻尼固有频率与模态衰减系数的变化规律。
研究3-R R S 柔性并联机器人系统的振动特性可为此类机器人的机构优化设计、控制和工程应用提供指导。
关 键 词:柔性并联机器人;动力学;R a y l e i g h 阻尼;振动特性中图分类号:T P 24 文献标识码:A 文章编号:1003-8728(2008)07-0861-05V i b r a t i o nC h a r a c t e r i s t i c s A n a l y s i s o f a 3-R R SF l e x i b l eP a r a l l e l Ma n i p u l a t o rL i u S h a n z e n g ,Y u Y u e q i n g ,D u Z h a o c a i ,Y a n g J i a n x i n(B e i j i n g U n i v e r s i t y o f T e c h n o l o g y ,B e i j i n g 100022)A b s t r a c t :An e wm o d e l o f s p a t i a l f l e x i b l e b e a me l e m e n t i s p r e s e n t e d .T h e d y n a m i c s m o d e l o f a 3-R R S f l e x i b l e p a r a l -l e l m a n i p u l a t o r i s d e r i v e d b a s e d o n t h e f i n i t e e l e m e n t m e t h o d ,L a g r a n g e f o r m u l a t i o n a n d c o n s t r a i n t c o n d i t i o n s o f t h e l e g s a n d t h e m o v a b l e p l a t f o r m .T h e n ,t h e v i b r a t i o n c h a r a c t e r i s t i c s o f t h e f l e x i b l e p a r a l l e l m a n i p u l a t o r w i t h R a y l e i g h d a m p i n g a r e d i s c u s s e d .A f t e r t h a t ,t h e d a m p e d n a t u r a l f r e q u e n c i e s a n d m o d a l d a m p i n g c o e f f i c i e n t o f t h i s m e c h a n i s ma r e a n a l y z e d t h r o u g h a n e x a m p l e .T h e r e s u l t s o f t h e e x a m p l e s h o w t h a t ,b ec a u s e o f R a y l e i g hd a m p i n g ,t he a m p l i t u d e of t h e f r e e v i b r a t i o n r e s p o n s e o f t h e s y s t e ms h a r p l y d e c a y w i t h t i m e .F o r t h e s y s t e mw i t h s m a l l d a m p i ng ,th e a p p r o xi -m a t e s o l u t i o n o f t h e p r i m a r y n a t u r a l f r e q u e n c y c a n b e c a l c u l a t e d b y n e g l e c t i n g t h e i n f l u e n c e o f t h e d a m p i n g .K e y w o r d s :f l e x i b l e p a r a l l e l m a n i p u l a t o r ;d y n a m i c s ;R a y l e i g h d a m p i n g ;v i b r a t i o n c h a r a c t e r i s t i c s 随着并联机器人技术不断向高速度、高加速度、高精度和轻量化等的发展,使得开展考虑机构构件及关节弹性变形的并联弹性动力学研究具有非常重要的意义[1~6]。
G .P i r a s [1]利用有限元理论与K E D分析方法研究了具有柔性杆的3-P R R 平面并联机器人的动力学问题,给出了第1阶固有频率随机器人位形的变化曲线,并分析了机构位形、几何刚度和动力学项对系统弹性振动的影响。
S h a o -C h i W a n g 等[2]对具有柔性关节的6自由度R T S 并联机器人的运动学和动力学问题进行了研究。
X i a o y u n W a n g 等[3]分析了平面3-P R R 并联机构动平台的响应和连杆末端的振动问题。
方跃法[4]、蔡胜利[5]和D uZ h a o c a i [6]等从不同的方面对并联机器人的弹性动力学问题进行了研究。
任何系统的自由振动都将在阻尼的作用下衰减并最终停止。
因此,在对系统作动力响应分析时,阻尼是不可忽视的一个重要方面。
本文在提出一种空间柔性梁单元的基础之上,建立了一种3-R R S 柔性并联机器人的弹性动力学方程,对含有R a y l e i g h 阻尼的3-R R S 柔性并联机器人的振动特性进行了分析。
1 动力学建模空间3-R R S 柔性并联机器人的机构,如图1。
动平台(上)和静平台(下)通过3条支链相连,其动、静平台均设为等边三角形,动平台通过球面副DOI :10.13433/j .cn ki .1003-8728.2008.07.031机械科学与技术第27卷(S 副)与各支链连接,静平台通过转动副(R 副)与各支链连接,其中B i 处转动副的轴线与C i (i =1,2,3)处转动副的轴线对应平行。
分别设立与动平台固结的局部坐标系O P -X ′Y ′Z ′和系统坐标系O -X Y Z 。
其中坐标系的原点O P 和O 分别位于动、静平台的几何中心,轴Z ′和Z 分别垂直于动、静平台向上,轴X ′、Y ′与X 、Y 分别平行和垂直于动、静平台的边P 2P 3与B 2B 3。
局部定坐标系B i -x ′i 1y ′i 1z ′i 1(i =1,2,3)的x ′i 1轴与B i 处转动副轴线一致,z ′i 1垂直于静平台B 1B 2B 3向上,y ′i 1轴同时垂直于x ′i 1和z ′i 1轴。
坐标系B i -x i 1y i 1z i 1(i =1,2,3)与各支链杆件B i C i 一同运动,其x i 1轴和z i 1轴分别与B i 处转动副轴线及杆件B i C i 矢量一致,y i 1轴同时垂直于x i 1和z i 1。
坐标系C i -x i 2y i 2z i 2(i =1,2,3)与各支链杆件C i P i 一同运动,其x i 2轴和z i 2轴分别与C i 处转动副轴线及杆件C i P i 矢量一致,y i 2轴同时垂直于x i 2和z i 2轴,如图1。
图1 3-R R S 并联机器人简图1.1 系统单元划分及坐标建立图2 空间梁单元模型典型空间梁单元有限元模型,如图2。
固定在单元上的坐标系o -x y z 称为单元坐标系。
此单元划分了2个节点分别标A 、B 。
假定空间梁单元发生轴向、横向(两个方向)和扭转变形,并用δ1~δ3与δ10~δ12、δ4~δ6与δ13~δ15、δ7~δ9与δ16~δ18分别表示节点A 、B 处的弹性位移、弹性转角和曲率。
假定3-R R S 柔性并联机器人机构中的构件B i C i 和C i P i (i =1,2,3)为柔性杆,并在杆件B i C i 和C i P i上分别设单元i 1和i 2(i =1,2,3);静平台B 1B 2B 3和动平台P 1P 2P 3为刚性架,忽略关节柔性和摩擦。
这样,系统共设立6个柔性梁单元。
驱动构件B i C i(i =1,2,3)作为空间悬臂梁看待,则杆件B i C i 中节点B i 的弹性位移和转角方向的节点变形均为零。
节点C i 处为转动副,则绕此转动副轴线方向的曲率为零;节点P i 处为球面副(等效于3个汇交不共面的转动副),梁的曲率也为零。
因此,杆件B i C i 的广义坐标为11个,杆件C i P i 的广义坐标为14个。
这样,支链B i C i P i 的节点变形可用25个单元坐标δi=[δi 1,δi 2,…,δi 25]T或22个系统坐标U i =[u i 1,u i 2,…,u i 22]T表示,如图3所示。
由于各支链弹性变形引起的动平台P 1P 2P 3的位移改变量可用6个系统坐标U 0=[u 01,…,u 06]T表示或6个局部坐标δ0=[δ01,…,δ06]T表示,如图1所示。