图的k-全控制数的一个上界
图的上符号控制数的上界

图的上符号控制数的上界刘惠敏【摘要】Гs(G)=max{(f)}|f是图G的极小符号控制函数}是图的上符号控制数上界,根据最小度最大度等参数改进了上符号控制数的上界,是对Favaron在正则图中给出的上符号控制数上界及Wang C.X.和Mao J.Z.在几乎正则图中给出的上符号控制数上界的一个推广.与Tang Huajun,Chen Yaojun在[3]中确立的解相比,结果更为精确.【期刊名称】《华东交通大学学报》【年(卷),期】2009(026)004【总页数】5页(P100-103,128)【关键词】符号控制函数;上界;上符号控制数【作者】刘惠敏【作者单位】华北电力大学数理学院,北京,102206【正文语种】中文【中图分类】O157.5本文讨论的图都是有限简单图。
设图G=(V,E),v∈V的邻域定义为N( v)={u∈V|uv∈E},闭邻域定义为N[ v]=N( v)∪{v}。
顶点v的度数定义为我们称图G是k-正则的,如果对于任意顶点v∈V,都有d( v)=k。
称图G是几乎k-正则的,如果对于任意顶点v∈V,都有d( v)=k-1或k。
设S⊆V,我们定义N( S)=∪v∈SN( v),用ds(v)表示v在集合S中相邻的顶点数。
图G的最小度和最大度分别用δ(G)和Δ(G)表示,在不引起混淆的情况下简记为δ和Δ。
对于不相交的点集A和B,我们用e (A,B)来表示A和B之间的边数。
本文中用到的其它术语请参照文献[4]。
图G的符号控制函数是一个函数f:V→{-1,1},使得对于任意顶点v∈V,都有∑u∈N[v]f( u)≥1。
我们记f[ v]=∑u∈N[v]f( u)。
符号控制函数f的权重定义为w( f)=∑v∈Vf(v)。
符号控制函数f是极小的,如果不存在符号控制函数g(g≠f)使得对于任意顶点v∈V,g( v)≤f( v)。
图G的上符号控制数用Γs (G)表示,定义为Γs(G)=max{w( f)|f是图G的极小符号控制函数}。
图的反符号边全K-控制数

图的反符号边全K-控制数徐保根;陈悦;孔祥阳【摘要】设G=(V,E)是一个图,一个函数f:E→{-1,+1}如果∑e′∈N(e)f(e′)≤0对于至少k条边e∈E成立,则称f为图G的一个反符号边全k控制函数.一个图G的反符号边全k控制数定义为γkst(G)=max{∑e∈Ef(e)|f为图G的反符边全k控制函数}.本文主要给出了连通图G的反符号边全k控制数γkst(G)的若干上限.【期刊名称】《江西科学》【年(卷),期】2010(028)006【总页数】3页(P722-723,726)【关键词】符号边全控制;反符号边全控制数;反符号边全k控制数【作者】徐保根;陈悦;孔祥阳【作者单位】华东交通大学基础科学学院,江西,南昌,331013;华东交通大学基础科学学院,江西,南昌,331013;华东交通大学基础科学学院,江西,南昌,331013【正文语种】中文【中图分类】O157.5本文中所指的图均为无向简单图,文中未说明的符号和术语同于文献[1]。
图的控制理论是图论中的重要分支,美国图论学者W T Haynes[2]等人在 1998年出版的专著中较为系统地综述了这一领域的一些主要研究成果。
然而,几乎所有的概念和结果都是针对图的点控制,涉及图的边控制的结果很少。
近来笔者已经将图的点控制概念转向研究图的边控制问题,并获得了一些初步的研究成果,如符号边控制[3]、符号星控制[4]和符号 k控制[5]等。
下面引入图的反符号边全 k控制概念。
【相关文献】[1] Bondy J A,Murty V S R.Graph Theory with Applications[M].Elsevier:Amsterdam,1976.[2] Haynes TW,Hedetniemi S T,Slater P J.Domination in graphs[M].New York:MarcelDekker, INC,1998.[3] Xu Baogen.On signed edge domination numbers ofgraphs[J].DiscreteMath.,2001,239:179-189.[4] Xu Baogen.Two classes of edge domination in graphs[J].DiscreteAppl.Math.,2006,154:1541-1546.[5] 徐保根.关于图的符号 k控制数[J].华东交通大学学报,2005,22(1):145-148.[6]徐保根.图的控制理论 [M].北京:科学出版社,2008.。
系统工程第四版习题解答(2)

系统⼯程第四版习题解答(2)系统⼯程姓名:姚德世专业班级:⼯程管理1107班学号:24系统⼯程第三次作业8、假设每⽉招⼯⼈数MHM和实际需要⼈数RM成⽐例,招⼯⼈员的速率⽅程是:MHM·KL=P*RM·K,请回答以下问题:(1)K和KL的含义是什么?(2)RM是什么变量?(3)MHM、P、RM的量纲是什么?(4)(4)P的实际意义是什么?解:(1)K表⽰现在时间KL表⽰由现在时刻到未来是可的时间间隔(2)RM是速率变量(3)MHM的量纲是KL;P的量纲是RM;RM的量纲是K;(4)P的实际意义是现在之未来的增长速率。
9. 已知如下的部分DYNAMO⽅程:MT·K=MT·J+DT*(MH·JK-MCT·JK),MCT·KL=MT·K/TT·K,TT·K=STT*TEC·K,ME·K=ME·J*DT*(MCT·JK-ML·JK)其中:MT表⽰培训中的⼈员(⼈)、MH表⽰招聘⼈员速率(⼈/⽉)、MCT表⽰⼈员培训速率(⼈/⽉)、TT表⽰培训时间、STT表⽰标准培训时间、TEC表⽰培训有效度、ME表⽰熟练⼈员(⼈),ML表⽰⼈员脱离速率(⼈/⽉)。
请画出对应的SD(程)图。
10. ⾼校的在校本科⽣和教师⼈数(S和T)是按⼀定的⽐例⽽相互增长的。
已知某⾼校现有本科⽣10000名,且每年以SR的幅度增加,每⼀名教师可引起增加本科⽣的速率是1⼈/年。
学校现有教师1500名,每个本科⽣可引起教师增加的速率(TR)是0.05⼈/年。
请⽤SD 模型分析该校未来⼏年的发展规模,要求:(1) 画出因果关系图和流(程)图;(2)写出相应的DYNAMO⽅程;(3)列表对该校未来3~5年的在校本科⽣和教师⼈数进⾏仿真计算;(4)请问该问题能否⽤其它模型⽅法来分析?如何分析?(1)解:(2)、解:L S.K=S.J+SR.JK*DTN S=10000R SR.KL=T.K*TSRC TSR=1L T.K=T.J+TR.JK*DTN T=1500R TR.KL=S.K*STRC STR=0.05(3)解:(4)11.某城市国营和集体服务⽹点的规模可⽤SD来研究。
运筹学期末复习资料1

第三节 单纯形法 一,确定初始基可行解 (1)特殊情况 例1maxZ=2x1+3x2 x1+2x2 ≤ 8 4x1 ≤ 16 4x2 ≤ 12 xj ≥ 0
(2)一般情况:大M法
maxZ=3x1-x2 -x3 x1-2x2+x3 ≤ 11 -4x1+x2+2x3 ≥ 3 -2x1+x3 =4 x1, x2 ,x3 ≥ 0
2.无界解
例maxZ=6x1+2x2 +10x3 +8x4 3x1-3x2 +2x3 +8x4 ≤ 25 5x1+6x2 -4x3 -4x4 ≤ 20 4x1-2x2 +x3 +3x4 ≤ 10 x1, x2 ,x3 , x4 ≥ 0 3.无穷多最优解
例maxZ= 4x1+14x2 2x1+7x2 ≤ 21 7x1+2x2 ≤ 21 xj ≥ 0
基本解:基变量XB == (x1, x2, …,xm)'
满足方程BXB=b,则XB=B-1 b,其余XN=0,则 称( x1, x2, …,xm,0…0)'为基本解. 基可行解:若B对应的基本解(XB,…0)'≥0, 则称该解为基可行解. 可行基:对应于基可行解的基为可行基.
例1.maxZ=2x1+3x2
练习: 练习:
maxZ=4x1+3x2 maxZ=-x1-x2 maxZ=10x1+x2 maxZ=x1+20x2 maxZ=-4x1+2x2 2x1+3x2 ≤ 6 -3x1+2x2 ≤ 3 2x2 ≤ 5 2x1+x2 ≤ 4 x1, x2 ≥ 0 ,
4
2 3 D
运筹学习题判断题及答案(通用篇)
运筹学习题判断题及答案(通用篇)一、判断题1. 线性规划问题中,目标函数必须是线性函数。
()答案:错误。
线性规划问题的目标函数可以是线性函数,也可以是非线性函数。
但是,当目标函数为非线性函数时,该问题就不再是线性规划问题。
2. 在目标规划中,若决策变量有上界和下界,则称为有界决策变量。
()答案:正确。
在目标规划中,有界决策变量是指决策变量具有上界和下界限制。
3. 对偶问题与原问题具有相同的可行域。
()答案:错误。
对偶问题与原问题具有相同的解,但可行域一般不同。
4. 在整数规划中,若决策变量取值为整数,则该问题一定为整数规划问题。
()答案:错误。
整数规划问题要求决策变量取整数值,但并非所有决策变量取整数值的问题都是整数规划问题。
例如,线性规划问题的决策变量也可以取整数值。
5. 在动态规划中,最优子结构的性质是指一个问题的最优解包含了其子问题的最优解。
()答案:正确。
动态规划的最优子结构性质是指问题的最优解可以通过求解子问题的最优解来构造。
6. 网络流问题是图论中的一个特殊问题,它涉及到图中各顶点之间的流量分配。
()答案:正确。
网络流问题确实是图论中的一个特殊问题,主要研究如何在图中各顶点之间进行流量分配,使得整个网络的流量达到最大。
7. 在排队论中,顾客到达率和服务率是描述排队系统性能的关键指标。
()答案:正确。
顾客到达率和服务率是排队论中描述排队系统性能的两个重要指标,它们分别表示单位时间内到达系统的顾客数和单位时间内服务完毕的顾客数。
8. 在库存管理中,经济订货批量(EOQ)模型适用于确定最优订货量和订货周期。
()答案:正确。
经济订货批量(EOQ)模型是库存管理中的一种重要模型,用于确定最优订货量和订货周期,以降低库存成本。
9. 在非线性规划中,库恩-塔克(KKT)条件是判断约束非线性规划问题最优解的必要条件。
()答案:正确。
库恩-塔克(KKT)条件是约束非线性规划问题最优解的必要条件,它提供了一种求解约束非线性规划问题的方法。
重庆大学自动控制原理2第9章-习题参考答案-作业
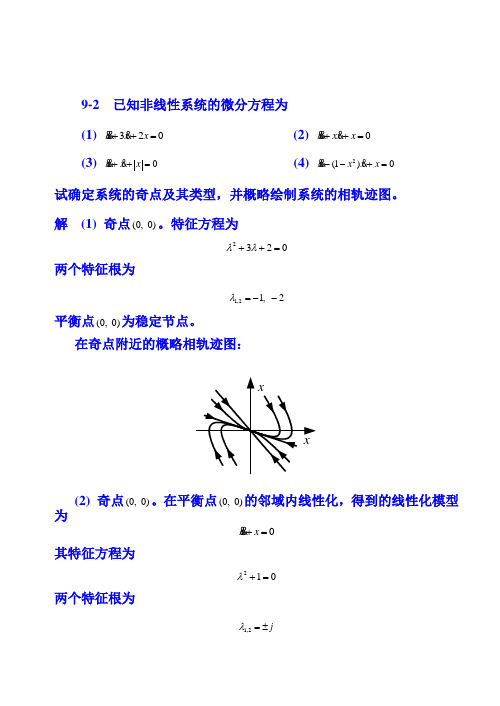
9-2 已知非线性系统的微分方程为 (1) 320x x x ++= (2) 0x xx x ++= (3)0x x x ++=(4)2(1)0x x x x --+=试确定系统的奇点及其类型,并概略绘制系统的相轨迹图。
解 (1) 奇点(0, 0)。
特征方程为2320λλ++=两个特征根为1,21, 2λ=--平衡点(0, 0)为稳定节点。
在奇点附近的概略相轨迹图:x(2) 奇点(0, 0)。
在平衡点(0, 0)的邻域内线性化,得到的线性化模型为0x x +=其特征方程为210λ+=两个特征根为1,2j λ=±1平衡点(0, 0)为中心点。
在奇点附近的概略相轨迹图:x(3) 奇点(0, 0)。
原方程可改写为0000x x x x x x x x ++=≥⎧⎨+-=<⎩ 其特征方程、特征根和类型为21,221,2100.50.866 10 1.618, 0.618 j λλλλλλ⎧++==-±⎪⎨+-==-⎪⎩稳定焦点鞍点 在奇点附近的概略相轨迹图:(4) 奇点(0, 0)。
在平衡点(0, 0)的邻域内线性化,得到的线性化模型2 为0x x x -+=其特征方程为210λλ-+=两个特征根为1,20.50.866j λ=±平衡点(0, 0)为不稳定焦点。
在奇点附近的概略相轨迹图:x9-6 非线性系统的结构图如图9-51所示,其中0.2a =,0.2b =,4K =,1T s =。
试分别画出输入信号取下列函数时在e -e 平面上系统的相平面图(设系统原处于静止状态)。
(1) () 2 1()r t t =(2)() 2 1()0.4r t t t =-+(3)() 2 1()0.8r t t t =-+(4)() 2 1() 1.2r t t t =-+图9-51 题9-6图解:由系统结构图可得4c c u +=。
由于e r c =-,那么4e e u r r ++=+。
控制工程基础期末复习题(带答案的)
一、填空题(部分可能模糊的已给出参考答案):1. 对时域函数进行拉氏变换:)(1t = 、t = 、at e -= 、sin tω= 。
2. 自动控制系统对输入信号的响应,一般都包含两个分量,即一个是瞬态响应分量,另一个是稳态 _响应分量。
3. 在闭环控制系统中,通过检测元件将输出量转变成与给定信号进行比较的信号,这个信号称为_____反馈___。
4. 若前向通道的传递函数为G(s),反馈通道的传递函数为H(s),则闭环传递函数为___ __5. 函数f(t)=的拉氏变换式是 。
6. Bode 图中对数相频特性图上的-180°线对应于奈奎斯特图中的__负实轴_________。
7. 闭环系统稳定的充要条件是所有的闭环极点均位于s 平面的 右半平面 半平面。
8. 已知传递函数为2()k G s s=,则其对数幅频特性L (ω)在零分贝点处的频率数值为ω=9. 在系统开环对数频率特性曲线上,低频段部分主要由 积分 环节和 比例 决定。
10. 惯性环节的传递函数11+Ts ,它的幅频特性的数学式是 ,它的相频特性的数学式是 ωT arctan - 。
11. 传递函数的定义是对于线性定常系统,在 初始条件为零 的条件下,系统输出量的拉氏变换与 输入量的拉氏变换 之比。
12. 瞬态响应是系统受到外加作用激励后,从 初始 状态到 最终或稳定 状态的响应过程。
13. 判别系统稳定性的出发点是系统特征方程的根必须为 负实根或负实部的复数根 ,即系统的特征根必须全部在 复平面的左半平面 是系统稳定的充要条件。
14. I 型系统G s K s s ()()=+2在单位阶跃输入下,稳态误差为 0 ,在单位加速度输入下,稳态误差为 ∞ 。
(参考教材P89)15. 频率响应是系统对 正弦输入 稳态响应,频率特性包括 幅频和相频 两种特性。
16. 如果系统受扰动后偏离了原工作状态,扰动消失后,系统能自动恢复到原来的工作状态,这样的系统是 (渐进)稳定的 系统。
数值计算方法第一章 误差
6
误差的来源
4.舍入误差 在计算过程中往往要对数字进行舍入。 如受机器 字长的限制,无穷小数和位数很多的数必须舍入成 一定的位数。 这样产生的误差称为“舍入误差”。 本课程只讨论截断误差与舍入误差对计算结 果的影响。
§1.2 绝对误差、相对误差和有效数字
7
绝对误差、相对误差和有效数字
1.2.1
绝对误差与相对误差
17
x* 0.a1a2 an 10m
如果
1 x x 10 m n 2
*
(1-5)
(1-6)
* x 则称近似值 有n位有效数字。
1 5 x 0 . 003400 10 例如 表示近似值0.003400准确 2
到小数点后第5位,有3位有效数字。
上面的讨论表明,可以用有效数字位数来刻划 误差限。 形如式(1-5)的数,当m一定时,其有效数字 数位n越大,则误差限越小。
但可以根据测量 能算出绝对误差 e( x*) 的准确值, 工具或计算的情况估计出它的取值范围,
8
绝对误差、相对误差和有效数字
即估计出误差绝对值的一个上界
e( x ) x x
* *
*
(1-2)
通常称 为近似值 x 的绝对误差限,简称误差限。 显然误差限不是唯一的。 有了误差限及近似值,就可以得到准确值 的范围 * * 即准确值 x
* 显然,误差限与近似值绝对值之比 * 为 x 的 一 x
个相对误差限。
例 取3.14作为 相对误差限.
的四舍五入的近似值,试求其
13
绝对误差、相对误差和有效数字
1 2 3 . 14 0 . 0016 10 解: 2 相对误差限 1 2 10 2 0.159 % * x 3.14 又如 由实验测得光速近似值为 c * 2.997925 105 km/s, 其误差限为 0.1 km/s, 于是
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 引 言
本 文只考 虑有 限 、 向简单 图 , 中未 说 明 的符 无 文 号和 术语 同于 文献 []设 G = (V, 2。 E)为一 个 图 , 和 E 分别 表示 图 G 的顶 点 集 和 边 集 。 任 意 的 对 VE V, Ⅳ( ) d V 分 别表 示点 在 图 G 中 用 V 和 ()
本文在 他们 研究 工作 的基础 上继 续 研究 这个 k
一
这样 的 k— i 邻 接 点 肯 定 存 在 的 。 进 一 步 有 个 更
J 居 ) D }因 J ≤( 一if 。 此, U( n ) D _ U 是一个k
一
全控 制数 , 利用 Ao l n在文 献 []中提 到 的概 率 的 1
全控 制集 。 利用 Ao l n在文 献 [ ]中提 到 的概 率方 1
方法 , 到 了 k一全 控制 数 的一个 较 好 上界 并 且 推 得 广 了 He nn n ig关于全 控 制数 ( 的一个 结果 。 G)
法, 我们 可 以得 到 ,
( ) E I UD。I≤ E I + G ≤ ( DU( n ) ( DI ) )
的 k一全 控 制数 ( 是指 最小 k一全 控制集 的点 G)
数 。 近 ,ho 人继续 对 k一全控 制数 进行研 究 并 最 Za等 取得 了较 好 的结果 。
∑ p1p(。 f. 一)) d’ ( 一 ‘)
下 面我们 来 构造 一 个 k一全 控 制集 : 任 意 的 对
Vo . 0 No. 1 1 3
第1 0卷第 3期
图 的 k一全 控 制 数 的 一 个 上 界
赵 伟 良
( 浙江工业职业技术学 院 , 浙江 绍兴 3 20 ) 10 0
【 摘
要】 利用概 率方法给出图的 k~全控制数 的一个 上界 , 并且推广 了关于全控制数 )( 的一个结果。 , G)
一
2 主要 结 果
引理 1 若 G为 / Z 阶图, 满足最小度 ≥k设集 ,
[ 收稿 日期] 2 1 4—1 0 0—0 6
1
一1
∑ E 1 ) (D1+∑( — ) (DI。 (D l≤E 1 ) k 1E I )
定理 2 若 G为 n阶图 , 足最 小度 ≥ k 则 满 ,
21 0 0年 6月
廊 坊 师 范 学 院学 报 ( 自然 科 学 版 )
J un lo a ga g T ah r i g ( tr a S in eE io ) o r a fL n fn e e esCo 。 。 Nau n l ce c dt n l i
Jn 2 1 u .0 0
a dgnrlea eut bu h oa dmiai u bry ( . n eea z sl ao t ett o n t nn m e i C) i r t l o
【 e od】 ttl 一dmiaig e; tl 一d miao u e;rbblt eh d K yw rs o nn mbrpoaisi m to i ic [ 中图分类号]0 5 . 17 5 [ 文献标识码 ]A [ 文章编 号]1 7 6 4—3 2 (0 0 0 —0 1 —0 2 9 2 1 )3 0 7 2
【 关键词】 k一全控制集 ; k一全控制数 ; 率方法 概
An Up e u n t e To a —Do i a in Nu b r i a s p r Bo nd o h t lk — m n to m e n Gr ph
ZHAo e.i n W ita z
D( i=0 1 … , , , k一 1 , D 是 由点 V E D )设 在 \D 中的 k—i 邻接 点构 成 的。 个 因为 ≥ k 所 以 ,
显然, k = 1时 , ) ( )= y( ) 而 当 有 ,G : lG 。
( 就 是被 广泛研 究 的全 控 制 数 , 于 这个 全 控 G) 关 制数 的研 究在 文献 [ ] 3 和文 献 []中有详 细 的叙述 。 4
E I +∑ ( —iE 1 )。 ( D1 ) k (Dl
E 1 =∑ P E D =n ; (D1 ) [ ] p
E 1 ) ( D l :∑P E D】 [
∈
:
如果对任意的 tE V都有 l ) k 图 G ) N( n DI 。 ≥
合 D V是 由 G中的点独立地 以概 率 P /E D]= [ 3
p O<P< 1 选取 , = { ∈ Vf Ⅳ( n Df ( ) D f )
= i( : 0 1 … , }i ,, k
一
1 ,则 E 1 ) ( 1 D )= n , p
P) 及 ( ≤ G)
EI l ∑f. ( : v ) d D (
证明 显然
的开邻域和度 , Ⅳ( 即 )={ ( , ) E} u VI u V ∈ 和 E
d )= f V J用 表示图 G的最小度。 ( Ⅳ( ) 。
图 的 k一全控 制数 是 由 K l 于 1 9 年首 次提 ul i 91 出的。 D 设 , D是 图 G的一个 k一全控 制集 , 称
【 b rc I ippr e i pr on eo l —dmnt n u br y s g h r ai t e o, A s at n h e w v a u e bud nt t o i i m e b i e o biim t d t 】 tsa ge n p o h tak ao n un t p b l e h s