六自由度机械手设计图纸(protues软件绘制)
CREO六轴机械手的仿真运动图文教程

六自由度机械手因为运动轨迹复杂,坐标法显然不合适。
所以本教程用快照法制作。
1.1首先是装配零件,新建组件P—HAND。
ASM,插入m—16ib_base_any_1_1.prt,连接方式是默认,如下图:1.2装配BASEPLATE_1,板上四个孔与机械手基座m—16ib_base_any_1_1.prt的对齐,并且基座m—16ib_base_any_1_1.prt底部与基板BASEPLATE_1表面配合,(这两个零件哪个先装配都可以,到动画制作时都作为基座处理)如下图:1.3装配零件m—16ib_axis1_any_1_1。
prt,以销的方式连接,注意销连接的方向,如图:1。
4旋转轴对齐,当前位置输入0,勾选启用重新生成值。
如下图:1.5销连接方式装配m—16ib_axis2_any_1_1.prt,注意销连接的方向,如下图:平移设置中,约束类型为距离,分别选择下面两个面,偏移距离15,如下图:旋转轴选择如下图的两个基准面,当前位置输入0,如下图:当前位置输入-40,零件往如下图所示的方向偏40度(这个要根据销连接的运动方向,如没有如下图所示的方向偏就改变销连接方向),如下图:点击设置零位置,勾选启用重新生成值,确定完成装配,如下图:1。
6装配零件m-16ib_axis3_any_1_1。
prt,还是销连接,轴对齐,平移选择下图两个面,约束类型为重合,注意销连接方向,如下图:旋转轴选择下面两个基准面,如下图:当前位置输入90,零件往如下图所示方向翻转90度(翻转的方向取决于销的连接方向),如下图:点击设置零位置,勾选重新生成值,如下图:装配零件m—16ib_axis4_any_1_1。
prt,销连接,如下图:旋转轴如下图:装配零件m-16ib_axis5-6_any_1_1。
prt,销连接,注意连接方向,如下图:旋转轴设置如下图:装配零件FIX_1,销连接,注意连接方向,如下图:旋转轴的设置和前面的差不多,如下图:物料装配,在这里不用约束,用户定义,放置设置成自动,如下图:显示基准面,点击拖动元件,弹出对话框,点击约束—对齐两个图元,分别选择下图两个基准面,如下图:点击对齐两个图元,分别选择下图两个曲面,如下图:点击对齐两个图元,分别选择下图箭头的两个基准面,在下面的偏移,offset处输入—700,如下图:点击拍下当前配置的快照,如下图:再点击拍下当前配置的快照,点击约束,点击对齐两个图元,点击显示基准面,分别选择下图两个基准面,如下图:点击对齐两个图元,分别选择以下曲面,如下图:对齐结果,如下图:隐藏基准面,点击主体—主体锁定约束,如下图:分别选择物料PP_1和FIX_1,然后点击右下角的小对话框的确定,生成一个主体锁定约束,如下图:点击运动轴约束,选择下图箭头中的销连接,如下图:下面的偏移值就是当前销连接的位置,如下图:用同样的办法添加下图所示的三个连接运动轴约束,如下图: 添加后,效果如下图:添加完毕后,点击约束旁边的快照,点击将选定快照更新为屏幕上的当前配置,如下图:点击拍下当前配置的快照,点击约束,删除两个对齐图元约束,点击相应的对齐图元约束,观察模型显示来判断,如下图:点击连接3、4、8把偏移值分别改成0,观察机械手与物料变化情况,如下图:添加完毕后,参照前面一样,点击约束旁边的快照,点击将选定快照更新为屏幕上的当前配置;点击拍下当前配置的快照,点击约束,删除一个对齐图元约束,点击相应的对齐图元约束,观察模型显示来判断,如下图:点击运动轴约束,添加下图所示的连接,如下图:在新添加的连接约束下面的偏移输入90,如下图:整个机械手旋转了90度。
六自由度机械手重载搬运机器人本体结构设计(全套CAD图纸)
全套设计通过答辩优秀CAD图纸QQ 36396305XX学院毕业设计说明书(论文)作者: 学号:学院(系):专业:题目: 重载搬运机器人本体结构设计【六自由度机械手】2015 年5月全套设计通过答辩优秀CAD图纸QQ 36396305毕业设计说明书(论文)中文摘要机械手是一种典型的机电一体化产品,搬运机械手是机械手研究领域的热点。
研究搬运机械手需要结合机械、电子、信息论、人工智能、生物学以及计算机等诸多学科知识,同时其自身的发展也促进了这些学科的发展。
本文对一种使用在搬运机械手的结构进行设计,并完成总装配图和零件图的绘制。
要求对机械手模型进行力学分析,估算各关节所需转矩和功率,完成电机和减速器的选型。
其次从电机和减速器的连接和固定出发,设计关节结构,并对机构中的重要连接件进行强度校核。
关键词:结构设计,机器臂,关节型机械手,结构分析毕业设计说明书(论文)外文摘要目录1 绪论 (1)1.1 引言 (2)1.2 搬运机械手研究概况 (3)1.2.1 国外研究现状 (3)1.2.2 国内研究现状 (4)1.4 搬运机械手的总体结构 (5)1.5 主要内容 (5)2 总体方案设计 (6)2.1 机械手工程概述 (6)2.2 工业机械手总体设计方案论述 (7)2.3 机械手机械传动原理 (8)2.4 机械手总体方案设计 (8)2.5 本章小结 (10)3 机械手大臂结构设计 (1)3.1 大臂部结构设计的基本要求 (1)3.2 大臂部结构设计 (2)3.3 大臂电机及减速器选型 (2)3.4 减速器参数的计算 (3)3.5承载能力的计算 (7)3.5.1 柔轮齿面的接触强度的计算 (7)3.5.2 柔轮疲劳强度的计算 (7)3.6 轴的计算校核 (8)3.7 大臂的平衡设计 (11)3.7.1 弹簧的受力分析 (11)3.7.2 弹簧的设计计算 (14)4机械手小臂结构设计 (18)4.1 腕部设计 (18)4.2 小臂部结构设计 (31)4.3 小臂电机及减速器选型 (31)4.3.1.传动结构形式的选择 (32)4.3.2.几何参数的计算 (32)4.4 凸轮波发生器及其薄壁轴承的计算 (33)4.4.1柔轮齿面的接触强度的计算 (34)4.4.2柔轮疲劳强度的计算 (35)4.5 轴结构尺寸设计 (36)4.6 轴的受力分析及计算 (36)4.7 轴承的寿命校核 (37)5机械手机身结构设计.......................................................................... 错误!未定义书签。
六自由度机械手设计说明书

六自由度机械手设计说明书设计参数摘要随着现代科技和现代工业的发展,工业的自动化程度越来越高。
工业的自动化中机械手发挥了相当大的作用,小到机床的自动换刀机械手,大到整个的全自动无人值守工厂,无一不能看到机械手的身影。
机械手在工业中的应用可以确保运转周期的连贯,提高品质。
另外,由于机械手的控制精确,还可以提高零件的精度。
机械手在工业中的应用十分广泛,如:一、以提高生产过程中的自动化程度应用机械手有利于实现材料的传送、工件的装卸、刀具的更换以及机器的装配等的自动化的程度,从而可以提高劳动生产率和降低生产成本。
二、以改善劳动条件,避免人身事故在高温、高压、低温、低压、有灰尘、噪声、臭味、有放射性或有其他毒性污染以及工作空间狭窄的场合中,用人手直接操作是有危险或根本不可能的,而应用机械手即可部分或全部代替人安全的完成作业,使劳动条件得以改善。
在一些简单、重复,特别是较笨重的操作中,以机械手代替人进行工作,可以避免由于操作疲劳或疏忽而造成的人身事故。
三、可以减轻人力,并便于有节奏的生产应用机械手代替人进行工作,这是直接减少人力的一个侧面,同时由于应用机械手可以连续的工作,这是减少人力的另一个侧面。
因此,在自动化机床的综合加工自动线上,目前几乎都设有机械手,以减少人力和更准确的控制生产的节拍,便于有节奏的进行工作生产。
应用前景工业机械手是近几十年发展起来的一种高科技自动化生产设备。
工业机械手的是工业机器人的一个重要分支。
它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。
机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
机械手是在机械化,自动化生产过程中发展起来的一种新型装置。
在现代生产过程中,机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术邻域内,迅速发殿起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
六自由度机械手重载搬运机器人本体结构设计(全套CAD图纸)
全套设计通过答辩优秀CAD图纸QQ 36396305XX学院毕业设计说明书(论文)作者: 学号:学院(系):专业:题目: 重载搬运机器人本体结构设计【六自由度机械手】2015 年5月全套设计通过答辩优秀CAD图纸QQ 36396305毕业设计说明书(论文)中文摘要机械手是一种典型的机电一体化产品,搬运机械手是机械手研究领域的热点。
研究搬运机械手需要结合机械、电子、信息论、人工智能、生物学以及计算机等诸多学科知识,同时其自身的发展也促进了这些学科的发展。
本文对一种使用在搬运机械手的结构进行设计,并完成总装配图和零件图的绘制。
要求对机械手模型进行力学分析,估算各关节所需转矩和功率,完成电机和减速器的选型。
其次从电机和减速器的连接和固定出发,设计关节结构,并对机构中的重要连接件进行强度校核。
关键词:结构设计,机器臂,关节型机械手,结构分析毕业设计说明书(论文)外文摘要目录1 绪论 (1)1.1 引言 (2)1.2 搬运机械手研究概况 (3)1.2.1 国外研究现状 (3)1.2.2 国内研究现状 (4)1.4 搬运机械手的总体结构 (5)1.5 主要内容 (5)2 总体方案设计 (6)2.1 机械手工程概述 (6)2.2 工业机械手总体设计方案论述 (7)2.3 机械手机械传动原理 (8)2.4 机械手总体方案设计 (8)2.5 本章小结 (10)3 机械手大臂结构设计 (1)3.1 大臂部结构设计的基本要求 (1)3.2 大臂部结构设计 (2)3.3 大臂电机及减速器选型 (2)3.4 减速器参数的计算 (3)3.5承载能力的计算 (7)3.5.1 柔轮齿面的接触强度的计算 (7)3.5.2 柔轮疲劳强度的计算 (7)3.6 轴的计算校核 (8)3.7 大臂的平衡设计 (11)3.7.1 弹簧的受力分析 (11)3.7.2 弹簧的设计计算 (14)4机械手小臂结构设计 (18)4.1 腕部设计 (18)4.2 小臂部结构设计 (31)4.3 小臂电机及减速器选型 (31)4.3.1.传动结构形式的选择 (32)4.3.2.几何参数的计算 (32)4.4 凸轮波发生器及其薄壁轴承的计算 (33)4.4.1柔轮齿面的接触强度的计算 (34)4.4.2柔轮疲劳强度的计算 (35)4.5 轴结构尺寸设计 (36)4.6 轴的受力分析及计算 (36)4.7 轴承的寿命校核 (37)5机械手机身结构设计.......................................................................... 错误!未定义书签。
六自由度机械手设计说明书
机械设计课程设计说明书六自由度机械手上海交通大学机械与动力工程学院专业机械工程与自动化设计者:李晶(52)李然(16)潘楷(45)彭敏勤(47)童幸(49)指导老师: 高雪官前言在工资水平较低的中国,制造业尽管仍属于劳动力密集型,机械手的使用已经越来越普及。
那些电子和汽车业的欧美跨国公司很早就在它们设在中国的工厂中引进了自动化生产。
但现在的变化是那些分布在工业密集的华南、华东沿海地区的中国本土制造厂也开始对机械手表现出越来越浓厚的兴趣,因为他们要面对工人流失率高,以及交货周期缩短带来的挑战。
机械手可以确保运转周期的一贯性,提高品质。
另外,让机械手取代普通工人从模具中取出零件不仅稳定,而且也更加安全。
同时,不断发展的模具技术也为机械手提供了更多的市场机会。
可见随着科技的进步,市场的发展,机械手的广泛应用已渐趋可能,在未来的制造业中,越来越多的机械手将被应用,越来越好的机械手将被创造,毫不夸张地说,机械手是人类是走向先进制造的一个标志,是人类走向现代化、高科技进步的一个象征。
因此如何设计出一个功能强大,结构稳定的机械手变成了迫在眉睫的问题。
目录一.设计要求和功能分析 4二.基座旋转机构轴的设计及强度校核 5三.液压泵俯仰机构零件设计和强度校核8四.左右摇摆机构零件设计和强度校核11五.连腕部俯仰机构零件设计和强度校核14六.旋转和夹紧机构零件设计和强度校核19七.机构各自由度的连接过程25八.设计特色28九.心得体会28十.参考文献30十一.任务分工31十二.附录(零件及装配图)31设计要求该机械臂用于物流生产线上物品的抓取和易位。
整个机械臂安装在一个回转支座上,回转角度范围为360度;小臂相对于大臂可摆动,摆动范围为60-120度;小臂末端的手腕也可以摆动,摆动范围为-60度到+60度;手腕的末端安装一机械手,机械手具有开闭能力,用于直径30-45mm工件的抓取,工件长度350mm,重量8kg。
功能分析系统共有6个自由度,分别是夹紧、旋转、俯仰(1)、左右摇摆、俯仰(2)及基座的回转。
6自由度多关节工业机器人图纸++
湖南科技大学毕业设计(论文)题目六自由度工业机器人结构设计作者学院机电工程学院专业机械设计制造及其自动化学号指导教师二〇一六年五月二十日湖南科技大学毕业设计(论文)任务书机电工程学院院机械设计制造及其自动化系(教研室)系(教研室)主任:(签名)年月日学生姓名:学号:专业:机械设计制造及其自动化1设计(论文)题目及专题:六自由度工业机器人结构设计2学生设计(论文)时间:自2015年3月1日开始至2015年5月29日止3设计(论文)所用资源和参考资料:《工业机器人》、《机器人学》、《机器人运动学基础》、《Solidworks2013从入门到精通》4设计(论文)应完成的主要内容:(1)介绍工业机器人的发展现状及前景;(2)工业机器人工作空间计算和简单的运动学分析;(3)工业机器人结构设计及关键零部件计算;(4)对关键零部件进行强度校核。
5提交设计(论文)形式(设计说明与图纸或论文等)及要求:(1)相关的计算、设计框图及仿真图;(2)论文不少于35页;(3)说明书中必须有与设计(论文)内容或专业相关的不少于1500字的外文资料翻译。
6发题时间:2015年3月1日指导教师:学生:湖南科技大学毕业设计(论文)指导人评语[主要对学生毕业设计(论文)的工作态度,研究内容与方法,工作量,文献应用,创新性,实用性,科学性,文本(图纸)规范程度,存在的不足等进行综合评价]指导人:(签名)年月日指导人评定成绩:湖南科技大学毕业设计(论文)评阅人评语[主要对学生毕业设计(论文)的文本格式、图纸规范程度,工作量,研究内容与方法,实用性与科学性,结论和存在的不足等进行综合评价]评阅人:(签名)年月日评阅人评定成绩:湖南科技大学毕业设计(论文)答辩记录日期:学生:学号:班级:题目:提交毕业设计(论文)答辩委员会下列材料:1设计(论文)说明书共页2设计(论文)图纸共页3指导人、评阅人评语共页毕业设计(论文)答辩委员会评语:[主要对学生毕业设计(论文)的研究思路,设计(论文)质量,文本图纸规范程度和对设计(论文)的介绍,回答问题情况等进行综合评价]答辩委员会主任:(签名)委员:(签名)(签名)(签名)(签名)答辩成绩:总评成绩:摘要六自由度工业机器人是一种高精度的自动化机械,具有高度的灵活性以及平稳性。
六自由度搬运机械手电路模块设计
3. 电路模块的设计从本课题设计的六自由度机械手结构及各方面因素综合考虑,我们可以在机械手的每个活动关节相配一台舵机提供动力驱动。
与液压、气压驱动相比,其驱动源和系统较为简单,舵机又是配套的通用产品,规格齐全,容易得到,不需要另行设计,在位置精度要求不高的情况下,控制系统方便。
本设计采用AT89S51单片机来控制六个舵机从而分别控制六自由度机械手的旋转或曲摆。
采用Protel99se画图软件进行电路图的绘制。
其电路主要分为三大模块:电源开关控制模块;USB接口烧写模块及AT89S51单片机模块。
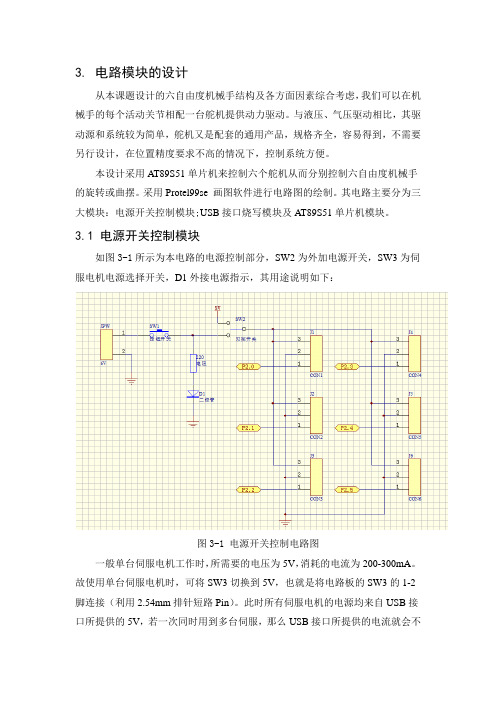
3.1 电源开关控制模块如图3-1所示为本电路的电源控制部分,SW2为外加电源开关,SW3为伺服电机电源选择开关,D1外接电源指示,其用途说明如下:图3-1 电源开关控制电路图一般单台伺服电机工作时,所需要的电压为5V,消耗的电流为200-300mA。
故使用单台伺服电机时,可将SW3切换到5V,也就是将电路板的SW3的1-2脚连接(利用2.54mm排针短路Pin)。
此时所有伺服电机的电源均来自USB接口所提供的5V,若一次同时用到多台伺服,那么USB接口所提供的电流就会不够伺服电机使用,此时就必须以外加电源的方式,来供给伺服电机所需的电压及电流。
所以将SW3切换到外加电源端,也就是将电路板里的SW3的2-3脚连接并在JPW引脚加入伺服电机所需的电源6V,如此方能有足够的电流提供给多台伺服电机使用。
因为本电路使用单片机控制六个伺服电机,所以需要使用外加电源来提供给J1-J6的伺服电机的转动。
3.2 USB烧写接口模块为了给单片机烧录程序,如果设计的电路板上没有烧录模块,就不得不频繁的插拔单片机在开发板上进行程序的擦写,这样容易造成单片机引脚的折断。
为了方便程序擦写,采用了USB-ISP下载线,并在电路板上设计ISP接口模块,然后通过软件Keil uvision2进行程序的擦写。
USB-CHIP下载线基本原理是ATMEGA8芯片进行USB串口协议的软件模块和ISP接口下载。
(完整版)六自由度搬运机械手结构设计
(完整版)六⾃由度搬运机械⼿结构设计2. 六⾃由度搬运机械⼿的结构设计根据机械⼿的基本要求能快速、准确地拾起-放下搬运物件,这就要求它们具有⾼精度、快速反应、⼀定的承载能⼒、⾜够的⼯作空间和灵活的⾃由度及在任⼀位置都能⾃动定位等特征。
设计原则是:充分分析作业对象(⼯件)的作业技术要求,拟定最合理的作业⼯序和⼯艺、并满⾜系统功能要求和环境条件;明确⼯件的形状和材料特性,定位精度要求,抓取、搬运时的受⼒特性、尺⼨和质量参数等,从⽽进⼀步确定对该机械⼿结构和运⾏控制的要求;尽量选⽤定型的标准组件,简化设计制造过程,兼顾通⽤性和专⽤性,并能实现柔性转接和编程控制。
本课题设计的是⼀种⼩型的多关节式六⾃由度机械⼿,能够满⾜相应的动作要求,并对⼀些⼩质量⼯件实现抓取、搬运等⼀些列动作。
2.1 六⾃由度搬运机械⼿的功能分析该机械⼿系统共有6个⾃由度,分别为肩的回转与曲摆,⼤臂的曲摆,⼩臂的曲摆,⼿腕的曲摆与回转,以及⼿抓的回转。
该系统中基座固定,与基座相连的肩可以进⾏360度的回转;与肩相连接的⼤臂可以进⾏-90~+90度曲摆,与⼤臂相连接的⼩臂可以进⾏-90~+90度曲摆,⼤臂和⼩臂动作幅度较⼤,可以满⾜俯仰要求。
⼿腕可以进⾏360度的旋转,⼿腕也可以完成-90~+90度的曲摆,末端的⼿⽖部分可以-90~+90度夹持,⼿⽖部分通过⼀对齿轮的啮合转动,及其四杆机构完成⼿⽖的开合,可以满⾜夹持⼯件的要求。
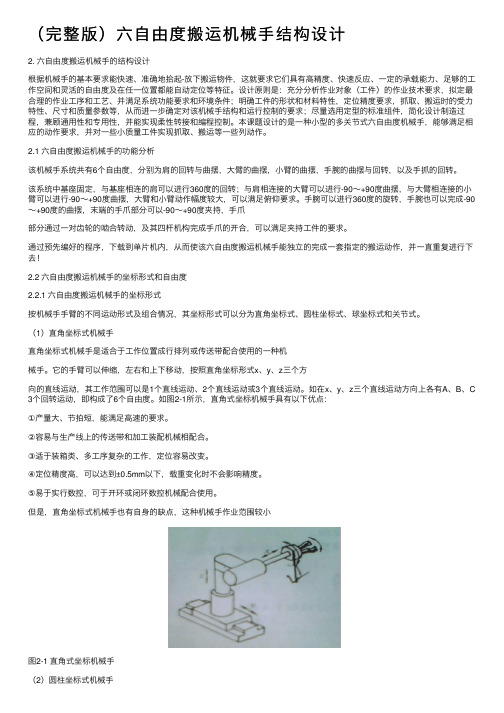
通过预先编好的程序,下载到单⽚机内,从⽽使该六⾃由度搬运机械⼿能独⽴的完成⼀套指定的搬运动作,并⼀直重复进⾏下去!2.2 六⾃由度搬运机械⼿的坐标形式和⾃由度2.2.1 六⾃由度搬运机械⼿的坐标形式按机械⼿⼿臂的不同运动形式及组合情况,其坐标形式可以分为直⾓坐标式、圆柱坐标式、球坐标式和关节式。
(1)直⾓坐标式机械⼿直⾓坐标式机械⼿是适合于⼯作位置成⾏排列或传送带配合使⽤的⼀种机械⼿。
它的⼿臂可以伸缩,左右和上下移动,按照直⾓坐标形式x、y、z三个⽅向的直线运动,其⼯作范围可以是1个直线运动、2个直线运动或3个直线运动。