2011电子设计大赛C组一等奖论文(小车)
2011年全国大学生电子设计竞赛智能小车

--
4
+6.5V
+5
U1
IN1 IN2 IN3 IN4
EA EB
5 7 10 12
IN1 IN2 IN3 IN4
6 11
EN A EN B
VSS VS
9 4
OUT1 OUT2 OUT3 OUT4
2 3 13 14
8 GND
ISEN A ISEN B
1 15
L298N GND
D7
D8
D9
D10
D2
D3
1
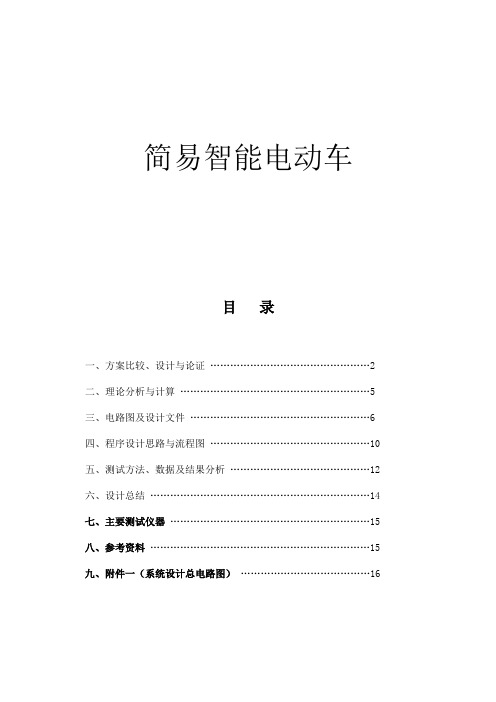
2.2 系统控制模块
选择 STC89C52 单片机进行系统的控制。该单片机具有 IAP 功能,运行稳定, 保密性强,支持在线下载,且内部集成了 EEPROM,STC98C52 是我们比较熟悉 的一种常用的单片机,指令系统和 AT89C52 兼容,价格便宜,较容易购买。
2.3 循迹模块
采用反射式红外传感器作为循迹检测主要器件,利用红外波的返回信号来识 别周围环境的变化。由于黑白物体反射系数的不同,通过调节使光敏三极管就只 能接收到白色物体反射回来的光束。而对于黑色物体由于其反射系数小,所反射 回来的光束很弱,光敏三极管无法接收到反射光。利用反射光可以使光敏三极管 实现导通和关断,从而实现对黑白物体的分辨。将循迹检测系统放在车前左右两 侧,当检测到黑色边界线时,在红外反射管处得到低电平信号,在经过反相器 74LS14 后,能更加灵敏和精准输出高电平信号,单片机得到高电平信号后控制 小车向相反方向行进。
鉴于以上分析,采用方案二。
--
2
2.5 无线通信模块
采用 NRM24L01 无线模块,该模块具有功耗低,通信传输速率高的特点。该 模块可控制在超车模式下,甲乙两车同时启动,保证开始时间准确。同时又可在 乙车超过甲车后,通过无线通信,使甲车提高速度,追赶乙车。
2011年电子设计大赛C题.

智能小车(C题)摘要:本设计以TI公司的超低功耗MSP430F1169单片机为核心。
MCU将各传感器得到的信息进行综合判别和处理,然后发出指令给电机驱动器,控制小车,使小车能够快速、准确的实现行车道内正常行驶,超车区内交替超车。
本设计使用了光电传感器检测标识线,采用红外测距模块检测小车与边界的距离,使用超声波传感器测量车辆的位v置,矫正车距,多传感器并行工作,MCU的综合数据处理为小车按照预定程序运行提供了充分的保证;同时通过无线传输模块实现两小车的通信,增强了系统的协调能力。
整个系统很好的完成了规定的行程及交替领跑超车的动作,并在行驶过程中具有较好的自调节能力和自适应性。
关键词:MSP430 步进电机无线通信超声波红外光电传感器Abstract: This design uses TI company's low power consumption MSP430F1169 as the core. The sensors get MCU comprehensive discrimination and processing information, then issue commands to motor drive ,then controls the car , make the car can be quickly and accurately, realize normal driving in the carriageways , overtaking alternately in overtaking area . This design uses the photoelectric sensor test mark line, using infrared distance module test the distance that the car from the border inspection, useing ultrasonic sensor measuring the position of the vehicles, and correct the car,s distance , many sensors from the comprehensive work MCU parallel data processing for the car to run the program set to provide ensured; And at the same time through wireless transmission modules realize two car communication, enhance the system coordination ability. The whole system is very good complete the required itinerary and the overtaking alternately action which has good self adjust ability and adaptability In the course of driving .Keywords:MSP430 stepping motor wireless communication ultrasonic infrared photoelectric sensor一系统方案论证本次设计要求为设计两辆智能小车,能在指定赛道上正常行驶并实现交替超车功能,根据题目具体要求,系统结构设计如下图1所示。
2011电子设计大赛C组一等奖论文(小车)

2011年全国大学生电子设计竞赛论文课题:智能小车(C题)摘要:为了满足智能小车的设计要求,设计了以微控制器为核心的控制系统和算法。
首先进行了各单元电路方案的比较论证,确定了硬件设计方案。
小车采用了两轮双电机驱动方式,以16位微控制器MC9S128MAA作为控制核心。
采用VNH3SP30驱动直流电机,该驱动芯片具有内阻小、电流大、且控制简单的特性。
通过编码器及PID控制算法实现了小车运动速度和转向的精准控制。
通过红外发射管及1KL3B红外接收管,实现了小车搜寻内沿黑线及边线等功能;系统显示单元选用了图形点阵式LCD,通过串行数据通信实现信息显示。
实际测试表明,所采用的设计方案先进有效,完全达到了设计要求。
关键词:智能小车,红外,寻线,超车,单片机1、系统方案的设计与论证1.1 系统总体框架整个系统分为系统模块、角度检测模块、电机驱动模块、电源模块、显示模块。
各模块的系统框图如图1所示。
图1 系统模块框图1.2 方案论证与比较(1)控制模块传统的51单片机广为应用,具有使用简便、便宜价格等优点,但是其运算能力较低,速度较慢,功能相对单一,难以实现较复杂的任务要求。
MC9S12XS128是一款功能强大的16位微控制器,具有非常丰富的片上资源,如:10位精度的ADC,节省了片外AD;强大的定时器,方便对电机进行控制,可以进行浮点型运算。
另外还有精密的比较器,大容量的RAM和ROM,可存储大容量的程序。
(2)电机模块方案方案一:采用步进电机控制悬挂物体的准确运动,步进电机不需要使用传感器就能精确定位,但其驱动能有限不适合驱动小车。
方案二:采用低内阻大电流的电机驱动芯片VNH3SP30 驱动直流电机,相比于L298NSP30优势明天且速度相应较好。
基于上述理论分析,我们选择方案二。
(4)显示系统方案方案一:采用LED数码管显示器。
LED 数码管亮度高,醒目,但是其电路复杂,占用资源较多,显示信息量较小。
方案二:LCD液晶显示器。
电子设计竞赛报告_简易小车
简易智能电动车目录一、方案比较、设计与论证 (2)二、理论分析与计算 (5)三、电路图及设计文件 (6)四、程序设计思路与流程图 (10)五、测试方法、数据及结果分析 (12)六、设计总结 (14)七、主要测试仪器 (15)八、参考资料 (15)九、附件一(系统设计总电路图) (16)一、方案比较、设计与论证本设计基于闭环测量、控制的原理,通过传感器将检测信号反馈给微处理,实时监控小车的运动状态并显示必要信息。
利用微处理产生脉冲宽度调制(PWM)信号,通过驱动电路来控制直流电机的转动,从而实现小车的直线行走、左右拐弯、倒退、停止、躲避并绕过障碍物、自动寻找引导光源并定位等功能。
功能框图见图1。
整个设计关键在于传感器的选择和安装,这些传感器要能够给出准确的信号让微处理来控制小车的行走。
图11、小车的比较与选择常见的电动小车是两轮驱动,一个电机驱动后面两个轮子转动,另一个电机控制前面两个轮子转向。
它的缺点是:转弯的角度较大且固定,不能精确地控制转角的大小。
小车在运行时平稳性较差。
而四轮驱动的小车,左右两边的轮子分别由两个电机控制,可以通过改变左右电机的转速来控制小车的转向,转弯的角度可大可小,这种控制方法能够使小车平稳地实现拐弯的功能,运行时车身稳定、没有左右摇摆的现象。
综合两者的特点,我们在设计中选择了四轮驱动的小车,小车的尺寸为14cm ×25cm,完全符合题目中15cm×35cm的尺寸要求。
2、传感器的比较与选择(1)路径识别传感器要求准确识别黑线与白纸,给出识别信号。
常用的传感器有可见光光电传感器、红外光光电传感器、CCD光电传感器等。
我们经过比较,选用了体积小、抗干扰性强、价格便宜的红外光光电传感器GK-SB5,配以外围电路可准确实现识别黑色和白色的功能。
GK-SB5使用的是红外光发射和接收,受外界环境的影响较小,另外GK-SB5体积较小,便于调节位置,以适应识别不同宽度黑线的需要。
2011电赛全国一等奖报告
2011年全国大学生电子设计竞赛智能小车(C题)【本科组】2011年9月3日摘要为了满足可以实现自动驾驶、超车功能的智能小车,进行了各单元电路方案的比较论证及确定,系统以飞思卡尔XS128系列作为智能车的控制核心,通过激光,红外等传感器采集路面信息从而对智能车智能控制,通过蓝牙无线进行两车之间的信息通信,具有稳定,通信速率快的特点,对于小车的动力部分,采用MOS管的H桥进行驱动,驱动电流大。
经测试,系统基本完成了题目要求。
关键字:智能小车XS128 超车控制自动驾驶abstractIn order to meet can achieve automatic driving, overtaking the intelligence function on the car, each unit circuit of the scheme more arguments and sure, system to XS128 series as a smart car freescale control core of laser, infrared, through such as road sensors to collect information and the intelligent car intelligent control, through the bluetooth wireless two car of information communication between, has the stable rate, communication features faster in car, the drive part, USES the MOS pipe of the H bridge drive, drive current big. According to the test, the system has basically completed the topic request.Key word: intelligent car XS128 overtaking control autopilot目录1系统方案 (1)1.1传感器方案的论证与选择 (1)1.2无线方案的论证与选择 (1)1.3 测速方案的论证与选择 (1)1.4 控制系统的论证与选择 (2)2系统理论分析与计算 (2)2.1 控制理论的分析 (2)2.1.1 PID算法 (3)2.1.2 PID计算 (3)2.2 红外测距的计算 (4)2.2.1 红外测距所得到的电压 (4)2.2.2 红外测距AD值与距离的关系 (4)2.3两车之间通信方法 (4)2.3.1两车之间通信方式 (4)2.3.2通信信息 (4)3电路与程序设计 (6)3.1电路的设计 (6)3.1.1系统总体框图 (6)3.1.2电源子系统框图与电路原理图 (7)3.1.3 传感器电路原理图 (7)3.1.4电机驱动 (8)3.2程序的设计 (8)3.2.1程序功能描述与设计思路 (8)3.2.2程序流程图 (9)4测试方案与测试结果 (10)4.1测试方案 (10)4.2 测试条件与仪器 (10)4.3 测试结果及分析 (11)4.3.1测试结果(数据) (11)4.3.2测试分析与结论 (11)附录1:电路原理图 (12)附录2:源程序 (13)智能小车(C题)【本科组】1系统方案本系统主要由激光模块、红外模块、无线模块、电机驱动模块、电源模块组成。
2011全国电子设计大赛C智能小车论文

2011年全国大学生电子设计竞赛设计报告智能小车(C题)摘要:智能小车可在预先设定的场景模式中自动运作,其设计主要集机械、电子、检测技术与智能控制于一体,可应用于工业控制等领域,是机器人研究领域的一项重要内容。
本设计以玩具小车为车体,硬件是以STC89C52单片机为主控芯片,配合直流电动机、光电传感器、超声波传感器、无线收发器、LED 数码管等器件构成,并通过相应的软件代码实现控制小车的前进、转弯、加速、减速等动作;实现了精准地完成两小车同时起动,并在行车道同向而行,在超车区实现两车交替超车领跑功能,并由LED显示系统的行驶时间和通信节能等指标。
实验表明,本设计结构简单,在一定程度上体现了小车的智能化运作,具有较好的鲁棒性。
关键词:智能小车;场景模式;超声波传感器;无线收发器;交替超车Design of Intelligent CarAbstract:Intelligent car be automatic operation in the pre-set Prospects mode.It is designed by an organic whole of machinery, electronics, detection technology and intelligent control. Intelligent car can be used in the industrial control, it is an important content of the field of Robot research.The toy car is use for the body of Intelligent car in the designe.The hardware is made up of the devices ofSTC89C52 microcontroller which is the main control chip, dc motor, photoelectric sensors, ultrasonic sensors, wireless transceiver, LED digital,etc.And it can make the car realize the faction of sdvance, turn, accelerate, slowing down,etc. It also can accurately finish two cars a starting at the same time,and two cars can run in the same direction in the running lane, realise two car overtaking alternately in overtaking area. The LED displays travel time and passed black line and realise Communication energy saving.The designe shows that this design is simple in structure,reflects intelligent operation in a certain extent and has good robustness.Key words: Intelligent Car;Prospects Mode;Ultrasonic Sensors;WirelessTransceiver;Overtaking Alternately;Energy Saving目录一、系统设计要求......................................................... - 1 -1.1 任务............................................................. - 1 -1.2设计相关要求..................................................... - 2 -1.2.1 基本要求................................................... - 2 -1.2.2 发挥部分................................................... - 2 -二、系统方案论证与选择................................................... - 2 -2.1 系统基本方案..................................................... - 2 -2.2系统各模块的最终方案............................................. - 6 -三、系统的硬件设计与实现................................................. - 6 -3.1系统硬件的基本组成部分........................................... - 6 -3.2主要单元电路的设计............................................... - 7 -3.2.1电源电路................................................... - 7 -3.2.2控制电路................................................... - 8 -3.2.3循迹探测电路............................................... - 8 -3.2.4测距电路................................................... - 9 -3.2.5电机驱动电路.............................................. - 10 -3.2.6数码管显示电路............................................ - 10 -3.2.7无线通信电路.............................................. - 11 -四、系统软件设计........................................................ - 12 -4.1基本要求甲车流程图.............................................. - 12 -4.2基本要求乙车流程图.............................................. - 13 -4.3超声波发送和接收模块流程图...................................... - 14 -五、系统测试............................................................ - 14 -5.1测试仪器........................................................ - 14 -5.2指标测试........................................................ - 15 -5.2.1测试方法.................................................. - 15 -5.2.2测试数据及测试结果分析.................................... - 15 -5.2.3系统任务完成情况.......................................... - 15 -六、总结................................................................ - 16 -参考文献............................................................ - 16 - 附录................................................................ - 17 -一、系统设计要求智能车辆是集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,是智能交通系统的一个重要组成部分,其设计主要集机械、电子、检测技术与智能控制于一体,是机器人研究领域的一项重要内容,在军事、民用、太空开发等领域有着广泛的应用前景,且其智能技术广泛运用于各种领域。
电子设计大赛循迹小车设计报告

电子设计大赛循迹小车设计报告Final revision by standardization team on December 10, 2020.2012年山东省大学生电子设计竞赛参赛编号:004D012设计题目:车辆会车自动控制系统设计参赛学生姓名:孙帅张炳文丁士强所属专业:电子信息科学与技术指导老师:刘怀强目录一、系统方案选择和论证........................................................................... . (3)1、核心控制单片机模块的选择............................................................................ ................... -3 -2、自动寻迹模块............................................................................ ......................... ................. -3 -3、会车避障模块............................................................................ .............. ................. ......... - 4-4、电动机的选择..................................................................... ...... ........................ ................. - 4 -5、电机驱动模块............................................................................ ................. ....... ................ - 4-6、测距模块的论证与选择............................................................................ .................. ....... - 4-二、系统具体设计实现............................................................................ .... ........ ...... - 4-1、硬件电路的设计............................................................................ ........................... .......... - 5–、控制系统的总体设计方案............................................................................ ............... - 5 -、电机驱动电路 ........................................................................... .................................. - 5 -、循迹模块电路 ........................................................................... ................ ...... .......... - 5-、霍尔测距模块电路 ........................................................................... ......................... - 5-、两车通信模块............................................................................ ................ ................... - 5 –2、程序的设计............................................................................ ............................................ - 5–、程序功能描述与设计思路............................................................................ ................ – 6-、程序流程图............................................................................ ..................... ................ – 6-三、测试方案与测试结果............................................................................ ................ – 6-1、测试方案............................................................................ ........................................ ....... - 6 –2、测试条件与仪器............................................................................ ...................................... - 6–3、测试结果及分析............................................................................ ............................. ....... - 6–、测试数据............................................................................ ........................... .............. -6 -、分析与结论 ........................................................................... ................................ .... - 7-四、设计总结........................................................................... .................... ..................... - 8 -五、参考文献............................................................................ ............................... .......... -8 -附录一:电动机驱动模块原理图............................................................................ .............. - 9-附录二:BFD—1000五路循迹传感器............................................................................ ......... -9 -附录三:主程序流程图............................................................................ ................................ -10 -附录四:会车避让前行............................................................................ .............................. -11 -附录五:B车后退避让............................................................................ .............................. -12 -附录六::系统设计要求............................................................................ ............................ -13 –附录七:部分原程序............................................................................ ....... ............................. --14-车辆会车自动控制系统设计(D题)摘要:本设计是一种基于单片机控制的自动控制小车系统,包括小车系统构成软硬件设计方法。
电子设计竞赛控制组设计报告

编号:C甲00102 2011年全国大学生电子设计竞赛智能小车(C题)参赛队员:张纪宽()高军()朱真真()专业:电气工程与自动化电子信息科学与技术智能小车摘要:本系统主要设计和制作了甲乙两辆智能小车,使用软件编程控制小车完成交替超车。
两车均采用两片ATmega16单片机作为主控芯片,使用L298N 驱动两个减速电机为小车提供动力,行进中使用激光发射与接收模块检测路面标志线,运用NRF2401无线传输模块实现甲乙两车的即时通讯,在两车行驶过程中通过无线通信确定哪辆车在前面,当到达超车区时后面的车赶超前面的车从而实现交替超车。
本系统还增加了光电传感器用于防止小车撞车,并通过12864液晶屏实时显示小车行进的时间和行驶的圈数。
经过多次测试,小车运行良好,能够很好的完成基本部分和发挥部分的要求。
关键词:无线通信;激光检测;交替超车;Atmeg16单片机;光电开关Abstract: This system mainly design and the manufacture of the a b two vehicles intelligence, use the software control car finish alternate overtake. Two car all USES two pieces of ATmega16 monolithic processor as the main control chip, using L298N drive two reduction motor for the car to provide power, using a laser on the emitting and receiving module inspection mark line, use the NRF24L01 wireless transmission modules realize a b two car of instant messaging, in two driving process through the wireless communication determine which car in front, and when you get to the overtaking area the car behind, catch up the car in front and thus realizes the overtaking alternately. The system also increases the photoelectric sensor used to prevent the car crash, and through the 12864 LCD displays real time travel time and driving the car number of turns. After DuoCi test the car is running well, be better able to complete basic part and play a part of the request.Keywords: wireless communication;laser detection alternate;Atmeg16; overtaking photoelectric switch;single-chip microcomputer目录1.系统结构和功能介绍 (1)1.1设计任务与要求 (1)1.1.1设计任务 (1)1.1.2设计要求 (1)1.2理论分析与计算 (1)1.2.1信号检测与控制 (1)1.2.2两车之间的通信方法 (1)1.2.3系统节能减排方面的优化设计 (1)1.3系统基本方案 (1)1.4各模块方案的选择与论证 (2)1.4.1控制器的选择与论证 (2)1.4.2电机的选择与论证 (2)1.4.3电机驱动电路的选择与论证 (3)1.4.4无线通讯模块的选择与论证 (3)1.4.5标志线检测传感器的选择与论证 (3)2.系统硬件设计 (4)2.1 ATMega16的最小系统 (4)2.2 nRF24L01无线收发模块 (4)2.3电机驱动的电路设计 (5)2.4激光传感器收发电路 (6)3.软件设计 (6)3.1系统主程序流程图 (6)4.系统测试 (7)4.1测试方案及测试条件 (7)4.2测试表格 (7)4.3测试结果分析 (7)5.结束语 (8)6.参考文献 (8)附录 (9)1. 系统的结构和功能介绍1. 1设计任务与要求1.1.1设计任务设计并制作甲乙两辆小车通过软件编程,完成甲乙交替超车领跑的功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2011年全国大学生电子设计竞赛论文
课题:智能小车(C题)
摘要:
为了满足智能小车的设计要求,设计了以微控制器为核心的控制系统和算法。
首先进行了各单元电路方案的比较论证,确定了硬件设计方案。
小车采用了两轮双电机驱动方式,以16位微控制器MC9S128MAA作为控制核心。
采用VNH3SP30驱动直流电机,该驱动芯片具有内阻小、电流大、且控制简单的特性。
通过编码器及PID控制算法实现了小车运动速度和转向的精准控制。
通过红外发射管及1KL3B红外接收管,实现了小车搜寻内沿黑线及边线等功能;系统显示单元选用了图形点阵式LCD,通过串行数据通信实现信息显示。
实际测试表明,所采用的设计方案先进有效,完全达到了设计要求。
关键词:智能小车,红外,寻线,超车,单片机
1、系统方案的设计与论证
1.1 系统总体框架
整个系统分为系统模块、角度检测模块、电机驱动模块、电源模块、显示模块。
各模块的系统框图如图1所示。
MCU
标志线线检测模块
边线检测模
块
电机驱动
超声模块
无线通信模块
图1 系统模块框图
1.2 方案论证与比较
(1)控制模块
传统的51单片机广为应用,具有使用简便、便宜价格等优点,但是其运算能力较低,速度较慢,功能相对单一,难以实现较复杂的任务要求。
MC9S12XS128是一款功能强大的16位微控制器,具有非常丰富的片上资源,如:10位精度的ADC ,节省了片外AD ;强大的定时器,方便对电机进行控制,可以进行浮点型运算。
另外还有精密的比较器,大容量的RAM 和ROM ,可存储大容量的程序。
(2)电机模块方案
方案一:采用步进电机控制悬挂物体的准确运动,步进电机不需要使用传感器就能精确定位,但其驱动能有限不适合驱动小车。
方案二:采用低内阻大电流的电机驱动芯片VNH3SP30 驱动直流电机,相比于L298NSP30优势明天且速度相应较好。
基于上述理论分析,我们选择方案二。
(4)显示系统方案
方案一:采用
LED
数码管显示器。
LED 数码管亮度高,醒目,但是其电路
复杂,占用资源较多,显示信息量较小。
方案二:LCD
液晶显示器。
LCD
有明显的优点:微功耗、显示信息量大、
字迹清晰、美观、视觉舒适,使整个控制系统更加人性化。
因此,决定选用方案二。
综合以上各部分的比较结果,决定以MC9S12XS128微控制器为核心,通过驱动芯片控制直流电机实现小车的运动控制,以红外发射接收管实现边线和标志线的检测,同时在LCD 上显示实时信息。
2、系统的硬件设计与实现
2.1 系统的总体设计
根据前面的分析,设计出本系统的总体架构如图2所示。
MCU
MC9SXS128MAA
标志线线检测模块
边线检测模
块
电机驱动
超声模块
无线通信模块
图2. 系统架构框图
2.2单元电路设计及参数计算
(1)边线检测模块
寻边线模块利用XL6003产生的恒流源驱动红外发射管,接收管采用1KL3B 高灵敏度红外接收管,再通过LM393比较器实现硬件二值化输出,直接输送至单片机的IO 口,提高了系统的工作效率。
图3和图4分别给出了寻边线模块的工作流程及原理图。
红外管发射
接收管检测
比较器判断输出0
检测到黑线输出0
高于比较电
压
低于比较电压
恒流源驱动
图3 寻边线模块的工作流程
图4 寻边线模块的原理图
(2) 标志线检测模块
标志线检测采用检测黑线常用的TCRT5000对管,在接收管输出处上拉即可直接连接单片机IO 口输入单片机,在单片机内部经过数字滤波实现精准的标志线检测。
该模块的原理图如图5所示。
图5 标志线检测模块原理图
(3)直流电机驱动电路
竞赛之初我们采用LN298作为电机驱动,但经过一天的调试以后发现LN298的驱动能力不足且内阻较大,PID 调速很不稳定,因而采用了大电流低内阻的SP30芯片实现电机驱动,经过调试获得了良好的速度特性。
电机驱动电路的原理图如图6所示。
图6 电机驱动板原理图
(4)液晶显示电路
选取了48*84点阵型的NOKIA5110液晶,显示与前车距离。
3、软件设计
系统软件采用C语言开发,在CodeWarrior IDE环境下调试并实现功能。
主程序流程如图7所示,进入主程序并初始化后,判断拨码开关键值后执行相应的程序。
软件程序设计采用模块化的结构,便于分析和实现功能。
当拨码开关5为off是实寻线绕场一周程序,当为on的时候为超车程序。
流程图如图8所示。
开始
寻内侧线匀速前进
识别超车线
寻外侧线减速前进
识别起跑线
停止
图7 正常行驶一周的系统软件流程初始化(A车在前)
A车出发沿内边线行驶
发给B车行驶指令
B车出发
AB车寻线利用超声跟随
逐步提速
A车寻边线超车标记线减速等待B超车
B车寻到超车标记线
开始超车
超车结束
发送超车结束信息AB车交换序号
循
环
超
车
图8 超车程序的流程图
4、系统实测
在系统各部分硬件搭建完毕,软件调试结束后,我们对系统进行了实际测试。
数据表格分别如表1-表3所示。
表1. 小车行进一周的时间(单位:秒)
第一圈第二圈第三圈第四圈第五圈第六圈第七圈第八圈均值甲车19 19 18 18 18 18 18 18 18.25 乙车18 18 19 18 18 19 19 19 18.5
表2. 超车一周的时间(单位:秒)
第一圈第二圈第三圈第四圈第五圈第六圈第七圈第八圈均值甲车24 24 24 25 25 25 24 25 24.5 乙车23 23 24 24 24 23 23 25 23.6
表3. 两车间的最大距离(单位:cm)
第一圈第二圈第三圈第四圈第五圈第六圈第七圈第八圈均值间距223 232 243 231 226 237 234 225 231.4
5. 结论
通过合理的系统构建和软件编程,本系统能够完成题目要求,实现平稳的行驶和超车过程。
实际测试表明,所设计的软件和硬件系统具备良好的稳定性,小车具有较快的速度,可持续运行10圈,超出题目要求。
由于时间的原因,在设计时有部分因素未能实现,如采用探测距离更远的传感器、实现更好的速度调节等。