基于LVDT的高精度_数字式水平仪
LVDT工作原理
LVDT工作原理LVDT(线性可变差动变压器)是一种常用的传感器,用于测量物体的线性位移。
它通过电磁感应原理将物体的位移转换为电信号输出。
本文将详细介绍LVDT 的工作原理及其应用。
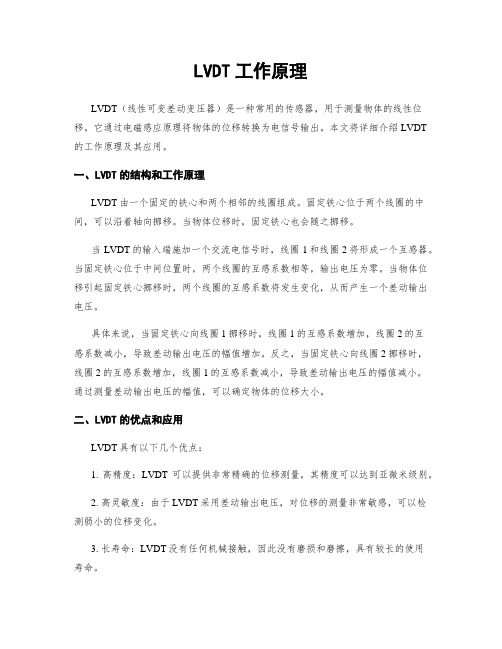
一、LVDT的结构和工作原理LVDT由一个固定的铁心和两个相邻的线圈组成。
固定铁心位于两个线圈的中间,可以沿着轴向挪移。
当物体位移时,固定铁心也会随之挪移。
当LVDT的输入端施加一个交流电信号时,线圈1和线圈2将形成一个互感器。
当固定铁心位于中间位置时,两个线圈的互感系数相等,输出电压为零。
当物体位移引起固定铁心挪移时,两个线圈的互感系数将发生变化,从而产生一个差动输出电压。
具体来说,当固定铁心向线圈1挪移时,线圈1的互感系数增加,线圈2的互感系数减小,导致差动输出电压的幅值增加。
反之,当固定铁心向线圈2挪移时,线圈2的互感系数增加,线圈1的互感系数减小,导致差动输出电压的幅值减小。
通过测量差动输出电压的幅值,可以确定物体的位移大小。
二、LVDT的优点和应用LVDT具有以下几个优点:1. 高精度:LVDT可以提供非常精确的位移测量,其精度可以达到亚微米级别。
2. 高灵敏度:由于LVDT采用差动输出电压,对位移的测量非常敏感,可以检测弱小的位移变化。
3. 长寿命:LVDT没有任何机械接触,因此没有磨损和磨擦,具有较长的使用寿命。
4. 宽工作范围:LVDT可以在较宽的温度范围内正常工作,适合于各种环境条件。
LVDT广泛应用于工业自动化、航空航天、机械加工等领域,主要用于以下几个方面:1. 位移测量:LVDT可以测量各种物体的线性位移,如机械零件的位移、液体的位移等。
2. 位移控制:通过监测LVDT的输出信号,可以对位移进行实时控制,实现自动化控制系统。
3. 振动测量:LVDT可以测量物体的振动频率和振幅,用于故障诊断和预测维护。
4. 压力测量:通过将压力与位移转换,可以利用LVDT测量液体或者气体的压力。
三、LVDT的应用案例1. 机械加工:在数控机床上,使用LVDT测量刀具的位置,以实现精确的切削操作。
LVDT工作原理

LVDT工作原理LVDT(Linear Variable Differential Transformer)是一种常用的线性位移传感器,广泛应用于工业自动化、航空航天、机械制造等领域。
它通过测量磁场的变化来检测物体的线性位移,并将其转化为电信号输出。
下面将详细介绍LVDT的工作原理。
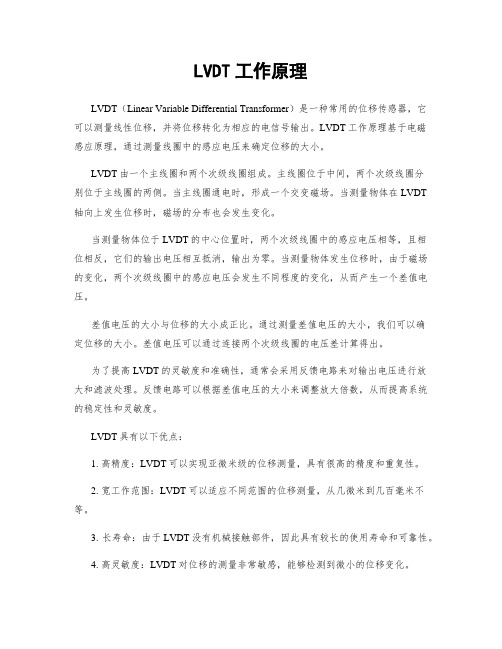
1. 结构组成LVDT由一个中央的固定铁心和两个相邻的线圈组成。
固定铁心通常由磁性材料制成,具有高导磁性能。
两个线圈分别位于固定铁心的两侧,称为一次线圈和二次线圈。
一次线圈通常由几百匝的细线制成,用于激励磁场。
二次线圈通常由数千匝的细线制成,用于检测磁场的变化。
2. 工作原理当LVDT的一次线圈通入交流电信号时,会在固定铁心周围产生一个交变磁场。
固定铁心的两侧分别与二次线圈相连,形成一个闭合磁路。
当没有外部力作用时,固定铁心位于中性位置,磁场均匀分布在两个二次线圈上。
当物体发生位移时,位于固定铁心两侧的磁场分布会发生变化。
具体来说,当物体向右位移时,固定铁心与右侧二次线圈的距离减小,与左侧二次线圈的距离增加。
这种位移会导致右侧二次线圈的感应电势增加,左侧二次线圈的感应电势减小。
反之,当物体向左位移时,右侧二次线圈的感应电势减小,左侧二次线圈的感应电势增加。
通过测量二次线圈的感应电势差,可以确定物体的位移大小和方向。
3. 工作特点LVDT具有以下几个工作特点:(1) 高精度:LVDT的位移测量精度通常可达到微米级别,具有良好的线性度和重复性。
(2) 高分辨率:由于二次线圈匝数较多,LVDT具有较高的分辨率,可以检测到微小的位移变化。
(3) 高灵敏度:LVDT的灵敏度取决于线圈匝数和磁场强度,可以根据具体应用需求进行调整。
(4) 长寿命:由于LVDT没有机械接触部件,因此具有较长的使用寿命和可靠性。
(5) 非接触式:LVDT的工作原理基于磁场感应,无需与被测物体直接接触,适用于非接触式测量。
4. 应用领域LVDT广泛应用于以下领域:(1) 工业自动化:用于测量机械装置的位移、压力、力等参数,实现自动控制和监测。
高精度数显智能水平仪的设计

万方数据酬器仪表装置平仪造成腐蚀,同时手中的热量不会传导至水平仪的测量底座.引起V形测量面形变而造成测量误差…。
高精度智能测量模块内部的液晶显示电路,传感器测量与数据处理、数据传输电路,供电电池组与电源电路等模块组成了整个测量系统的核心。
坚同的铝镁合金外壳保护智能测量模块内部的这些精密部件长期可靠稳定工作。
图1数显智能水平仪整体结构图Fig.1Gradienterintegratedstructurediagram智能水平仪-T作的基本原理是:通过测量重力加速度在三个敏感轴(X轴、y轴、Z轴)上分量的大小,分别得到X轴与水平面的夹角a.Y轴与水平面的夹角口,Z轴与水平面的夹角6[3],然后通过特定的算法得到被测面的水平角。
其数学模型图如图2所示。
图2水平仪测量数学模型示图Fig.2GradientermeasurementmathematicalmodeldiagramDA为X轴。
DB为y轴,DG为Z轴,DA上DB,假设X轴与水平面的夹角为a.Y轴与水平面的夹角为8。
X轴与y轴所组成的平面DAB与水平面的夹角为7,过D点做垂线与水平面相交于E点,那么LDAE=a。
LDBE=fl。
过E点做AB的垂线与AB交于C点.由立体几何知识可知LDCE即为平面EAB与水平面的夹角7。
下面推导出Olp、y之间的关系,假没DE=1,由DE_LAE,DE上BE可知:'1肌=士伽=去(1)8motslrp因为蹦上DB.又DC_LAB,故:田妄删xDB=-丢-ABxDC(2)又AADB为直角三角形,所以:A曰2=DA2+DB2(3)将AB代人式(2)得:DC:蹦×D8/、/面鬲面歹(4)又因为/kDEC为一直角i角形.所以:siny=器=壶=V/嘉+击(5)将式(1)代入式(5)得:y=arcsin(X/sin2a+sin移)(6)故由式(6)可知,在已知X轴和y轴与水平面夹角为d,/3的情况下.可精确地计算m被测面与水平面的夹角。
LVDT工作原理

LVDT工作原理一、概述线性变差传感器(Linear Variable Differential Transformer,简称LVDT)是一种常用的非接触式位移传感器,广泛应用于工业自动化、航空航天、机械创造等领域。
LVDT通过测量磁场中的感应电动势来确定被测物体的位移,具有高精度、稳定可靠、线性度好等优点。
二、工作原理LVDT由一个主线圈和两个从线圈组成,主线圈位于两个从线圈之间。
主线圈中通以交流电源,形成一个交变磁场。
当被测物体发生位移时,位于两个从线圈之间的铁芯也会随之挪移,从而改变磁场分布。
1. 静态状态在静态状态下,被测物体处于初始位置时,主线圈中的交变磁场平衡,两个从线圈中感应出的电动势相等,输出为零。
此时,LVDT处于中性位置。
2. 位移引起的磁场变化当被测物体发生位移时,铁芯也会随之挪移,改变磁场分布。
位移方向决定了两个从线圈中感应电动势的相位差,而位移量则决定了感应电动势的幅值。
3. 工作原理位移引起的磁场变化会导致两个从线圈中感应出不同的电动势。
这两个电动势的差值正比于被测物体的位移量。
通过测量这个差值,可以确定被测物体的位移大小。
三、特点与应用1. 特点(1)高精度:LVDT具有很高的测量精度,可达到亚微米级别。
(2)线性度好:LVDT的输出与位移之间呈线性关系,能够准确地反映被测物体的位移量。
(3)稳定可靠:LVDT采用非接触式测量原理,无磨损,寿命长,稳定可靠。
(4)抗干扰能力强:LVDT对温度、湿度等环境因素具有较好的抗干扰能力。
2. 应用领域(1)工业自动化:LVDT广泛应用于机床、机械加工、自动化生产线等领域,用于测量工件的位移、压力、拉力等参数。
(2)航空航天:LVDT可用于测量飞机发动机的振动、位移等参数,保证飞机的安全运行。
(3)机械创造:LVDT可以用于测量工件的位移、变形等参数,提高产品质量和生产效率。
(4)科学研究:LVDT可用于地震监测、结构变形测量等科学研究领域。
LVDT工作原理
LVDT工作原理LVDT(Linear Variable Differential Transformer)是一种常用的位移传感器,它可以测量线性位移,并将位移转化为相应的电信号输出。
LVDT工作原理基于电磁感应原理,通过测量线圈中的感应电压来确定位移的大小。
LVDT由一个主线圈和两个次级线圈组成。
主线圈位于中间,两个次级线圈分别位于主线圈的两侧。
当主线圈通电时,形成一个交变磁场。
当测量物体在LVDT 轴向上发生位移时,磁场的分布也会发生变化。
当测量物体位于LVDT的中心位置时,两个次级线圈中的感应电压相等,且相位相反,它们的输出电压相互抵消,输出为零。
当测量物体发生位移时,由于磁场的变化,两个次级线圈中的感应电压会发生不同程度的变化,从而产生一个差值电压。
差值电压的大小与位移的大小成正比。
通过测量差值电压的大小,我们可以确定位移的大小。
差值电压可以通过连接两个次级线圈的电压差计算得出。
为了提高LVDT的灵敏度和准确性,通常会采用反馈电路来对输出电压进行放大和滤波处理。
反馈电路可以根据差值电压的大小来调整放大倍数,从而提高系统的稳定性和灵敏度。
LVDT具有以下优点:1. 高精度:LVDT可以实现亚微米级的位移测量,具有很高的精度和重复性。
2. 宽工作范围:LVDT可以适应不同范围的位移测量,从几微米到几百毫米不等。
3. 长寿命:由于LVDT没有机械接触部件,因此具有较长的使用寿命和可靠性。
4. 高灵敏度:LVDT对位移的测量非常敏感,能够检测到微小的位移变化。
5. 无需校准:LVDT的输出与线性位移成正比,无需校准即可获得准确的位移测量结果。
LVDT广泛应用于工业自动化、航空航天、机械制造、仪器仪表等领域。
它可以用于测量机械零件的位移、振动、变形等参数,为工程师提供准确的数据支持,从而实现精确控制和监测。
总结起来,LVDT工作原理是基于电磁感应原理,通过测量线圈中的感应电压来确定位移的大小。
它具有高精度、宽工作范围、长寿命、高灵敏度和无需校准等优点,被广泛应用于各个领域的位移测量和控制系统中。
LVDT工作原理

LVDT工作原理LVDT(Linear Variable Differential Transformer)是一种常用的线性位移传感器,广泛应用于工业自动化、航空航天、机械创造等领域。
它通过测量磁场的变化来实现对物体位移的测量,具有高精度、高灵敏度和长寿命等特点。
LVDT由主体、一次线圈、二次线圈和铁芯组成。
主体通常由不导电材料制成,用于支撑和保护线圈和铁芯。
一次线圈通常由绕制在主体上的细线组成,它与电源连接,产生一个交变电磁场。
二次线圈则绕制在一次线圈的两侧,与测量电路相连,用于感应和测量位移。
当没有外力作用时,铁芯位于一次线圈的中心位置,二次线圈感应到的电压为零。
当物体位移时,铁芯会随之挪移,改变一次线圈中的磁场分布。
这种磁场变化会导致二次线圈感应到的电压发生变化,通过测量这个变化,可以确定物体的位移。
LVDT的工作原理基于法拉第电磁感应定律。
根据这个定律,当一个导体在磁场中运动时,会在导体两端产生感应电动势。
LVDT利用这个原理,通过测量感应电动势的变化来确定位移。
具体来说,当一次线圈通电时,会产生一个交变电磁场。
这个电磁场会穿过铁芯,并感应到二次线圈中。
当铁芯位于一次线圈的中心位置时,磁场穿过二次线圈的面积最大,感应到的电压为零。
当铁芯发生位移时,磁场穿过二次线圈的面积会发生变化,感应到的电压也会发生变化。
通过测量这个电压的变化,可以确定铁芯的位移。
为了提高测量精度,往往使用差动测量的方法。
差动测量是指将一次线圈分为两部份,分别与两个二次线圈相连。
这样,在测量时,两个二次线圈感应到的电压会相互抵消,从而减小了干扰信号的影响,提高了测量的灵敏度和准确性。
除了位移测量,LVDT还可以用于测量压力、力、扭矩等物理量。
通过将这些物理量转换为位移,再利用LVDT进行测量,可以实现对这些物理量的准确测量。
总结起来,LVDT是一种基于电磁感应原理的线性位移传感器。
通过测量磁场的变化来确定物体的位移,具有高精度、高灵敏度和长寿命等特点。
高精度数显智能水平仪的设计

YUE Ch —a g un f n
( e at n fE eto i ic i,P o l' Lb rt n A my Ai F re E gn ei g Unv ri , ’n 7 0 5 ,Chn ) D p rme to lcrnc C rut epes ieai r r oc n ie r ies y Xia 1 0 1 o n t ia
高 系统 测 量 精 度 的 措 施 在 特 定 工 作 环 境 下该 仪 器测 量精 度 可 达 ± .o 且稳 定 速 度 快 . 01 , 抗 震 动 能 力 强 . 作 方 便 . 耗 低 。 传 统 水 平 仪 良好 的 升级 换 代 产 品 。 操 功 是 关键词 : 电子 水 平 仪 :ME 加速 度 计 : 线 射 频 HS 无
水 平仪 是一 种测 量小 角度 的常用 量具 用 于测 量 相 对 于水平 位 置 的倾 斜 角 . 两部 件 间 相 互平 行 度 和 垂 直 度 , 床 导 轨 和 仪 器 导 轨 的直 线 度 , 作 台 机 工 平 面度 , 平板 的平 面度 等 作 为一种 常用 检 测工 具 . 现 在 一般 使 用 的 电子 式 水 平 仪 无 论 是 电 感 式 还 是 电 容 式 . 内 部 大 多 采 用 自由悬 挂 摆 锤 结 构 . 量 其 测 时摆 锤 受 地 心 重 力 影 响 而 偏 移 .造 成 感 应 线 圈 的 电压 变 化 或 极 板 间 电 容 值 的 改 变 .进 而 指 示 倾 角
文 章 编 号 :0 19 4 (3 1
高精度 数 显 智 能水 平仪 的设 计
岳 春 芳
( 国人 民解 放 军 空 军 工 程 大 学 电 子 系 , 西安 7 0 5 ) 中 1 0 1
基于LabVIEW的水平仪自动检测装置

f I I 卸 未能 在 根 本 I 消 除 完 令凭 主观 判 断 水 泡 分度 人 员 只需 将 被榆 水 仪 置丁 ¨ 1 作 l ,对 柃 洲 装 嚣
线 相对位置所带来的 ( 闪检定 人员个体判定标 准差 进 行_ 卡 』 J 始 没置
决 要对 分度 线 逐 一 静 止检 定 ,1 一 作 效 率较 低 等诸 多 定 结 果 、
水 仪榆 定 装 检 定 泡 水 平 仪 分度线 示值 误差 ? 速 转 动 ,被 检 水 平 仪 的气 泡 会 随 水 仪 榆 定 器 I 作
榆定时通过人 l 转 动 r轮 带 动 札 杆 螺 丝 剐使 一 I 作 台 而 的 均 匀倾 斜 变化 向 ・ f { J ! l J 做 匀速 运 动 , 气 泡 顶端 J , { 0 放小 倾 角变 化 ,迎 过 人 I 判断 水 泡 分度线 误 差 。 匀 速 通 过 每条 被 榆 刻 线 并 j 之j 寸 1 时, 像 采集 系
学 术 论 文
■蹬匝墨墨 E ! ! 圈
上 海 计量 测 试
加 ,其 t f I 包括 连续 像 的获取 、对 图 像的 预处 、 考 虑 到连 续 采集 .将 ・ 些 始 化操 作 提 取 H { 来 ,在
像获取足通过 每 次 连续 采 集开 始 时 ,仅 作 一次初 始 化 ,可 以提 高 摄 像 头 获取 水 平仪 玻璃 管 中液 泡 实 时运 动 , 像 质 程 序 的 J 作效 率 ?利 用 N 1 V i s i o n连续 像 的采 集 程
斡 代 r微 分 筒 读 数 , } 『 I j 除 检 定 过 程 中机 械部 分 脉 冲 数 作 …统 汁 , 系统 仔 储 的 标 准 f f [ 比较 ,输 … 个榆 定 过 程操 作 螺纹 l 【 I 1 程 误 差 , 义可 以 很 大 度 提 高 凄数 准 确 度 , 榆 定结 果 , 以 埂形 成 数据 撤 表
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2009年 第12期仪表技术与传感器I nstru ment Technique and Sens or 2009 No 112 收稿日期:2008-03-25 收修改稿日期:2009-08-11基于LV DT 的高精度、数字式水平仪李 哲,王宝光(天津大学精密测试技术与仪器国家重点实验室,天津 300072) 摘要:介绍了一种高精度数字式水平仪测量系统的软硬件设计,该仪器采用差动变压器式传感器LVDT,MSP430F149单片机作为控制单元。
给出了传感器标定及非线性补偿的方法。
研究结果表明:该系统的测量范围为±400″,分辨力达到011″,线性度可达0133%,可广泛应用于建筑、机械和地质等各种场合。
关键词:水平仪;MSP430单片机;LVDT中图分类号:T H712 文献标识码:A 文章编号:1002-1841(2009)12-0073-02H i gh Accuracy D i g it a l Grad i en ter Ba sed on L VD TL I Zhe,WANG Bao 2guang(St a te Key Labora tory of Prec isi on M ea sure m en t Technology and I n stru m en ts,T i a n ji n Un i versity,T i a n ji n 300072,Ch i n a)Abstract:A ne w type of high accuracy digital gradienter measure syste m was intr oduced .A differential transfor mer sens or LVDT,and MSP430m icr ocontr oller was t ook as the contr ol unit .The paper p resented the method of sens or de marcating and non 2linearity compensating .The study result shows that the sens or has a measuring range of ±400″,the res olving power of 011″,the linearity of 0133%.This gradienter can be widely used in on site,machine or geol ogic survey and s o on .Key words:gradienter;M SP430m icr ocontr oller;LVDT 0 引言目前广泛应用的微小角度测量仪器多采用电容传感器,但是存在精度不稳定、测量结果的离散性比较大、测量效率低、测量范围相对较小等缺点。
而电感式传感器相对于电容式来说虽然需要较高的输入能量、结构相对复杂,但是其在精密测量领域具有测量范围较大、测量精度和测量效率较高的优点。
介绍一种基于LVDT 的高精度、数字式微小角度测量系统。
1 角度测量系统的组成角度系统硬件结构主要由差动变压器式传感器LVDT 、信号调理电路、MSP430微处理器、键盘控制模块、液晶显示模块和计算机控制模块组成。
图1 系统硬件结构框图111 传感器工作原理该仪器采用了差动变压器式传感器LVDT,LVDT 是机械-电子传感器,它的输入信号是铁芯的机械位移量,输出是一对与铁芯位置成正比的交流信号。
LVDT 件包含一个初级绕组两个次级绕组,初级由外部参考正弦波信号源激励。
两个次级绕组串接,活动铁芯的移动可以改变初次级的耦合磁通,从而产生两个幅值不同的交流信号。
112 测试系统机械设计仪器的机械结构设计采用了双片簧精密微位移机械结构,系统机械设计及其实物外观如图2所示。
它包括3部分:一部分为支架和底座的连接,另一部分为固定工件-固定在支架上的固定工件,第三部分为摆动工件。
押动工件和固定工件由一对双片簧连接。
在测量过程中,如果仪器放置的表面有倾角,则仪器的整个结构也会倾斜。
但是摆动工件将由于重力的作用退回到倾斜的相反方向。
这样,LVDT (线性位移差动变压器)的线圈和轴心将会有一个相对位移,而这个相对位移将会转化为一个模拟电压输出。
一对双片簧引导着摆动件工件的移动。
图2 水平仪机械设计图由于该设计结构简单,所以在工作的过程中不会有磨损和损坏,并且在功能或精度上不会产生交叉影响。
在设计过程中,最重要的因素就是控制和降低片簧的滞后现象。
为了满足 74 I nstru ment Technique and Sens or Dec12009 这个需要,必须遵从2个原则:第一,制作片簧的材料应具有小的滞后作用,为此选择了一种利用镍钛铝合金制作的双片簧;第二,在工作过程中,最大偏移量Y应比片簧的最大弹性位移小4~5倍。
片簧的最大弹性位移δmax可以表示为δmax =b(L h)2σ72EI式中σ为片簧的弹性极限。
113 测量电路设计11311 信号调理电路设计AD598是新型的LVDT专用信号处理芯片。
它包含正弦波振荡器、功率放大器、解码器、滤波器及输出放大器。
正弦波振荡器由一个多谐振荡器构成,它输出的3次谐波驱动一个正弦波发生器,从而产生由外接电容定频的低畸变正弦波。
输出频宽为20Hz~20kHz,幅值有效值为2~24V,总谐波失真典型值为50d B.正弦波振荡器和功率放大器用来驱动LVDT的初级线圈。
11312 主控单元电路设计测试系统主控电路主要包括A/D转换、单片机控制、串口传输等。
采用超低功耗的M SP430F149为控制单元,设计了对测量过程进行控制,对测量结果进行显示、计算和传输的系统。
MSP430F14x系列具有48个可独立编程的I/O口,16个独立的外部中断源,2个16位的定时器,两通道串行通信接口可用于异步或同步(软件选择UART/SP I模式),选用的M SP430F149处理器具有多达60K B F LASH ROM和2K B RAM,完全满足系统要求。
其片内精确的温度传感器也为产品高低温性能补偿提供了必要的参数。
虽然单片机自身集成了1个高速的12位A/D转换器,但是为了能更好地满足系统高分辨率的需求,选择外接一个14位ADC.系统选用了AD7940,它具有SP I接口,可以直接和单片机串口进行同步通讯,接口电路非常简单,减少了系统外围设备。
和计算机通讯采用RS-422协议,选用MAX3491芯片。
主控模块设计2个按键和1块128×64像素的单色显示屏,可以进行测量操作,实时显示测量结果。
2 系统软件设计211 单片机软件设计该仪器是以MSP430单片机为核心的主控单元。
除了接收计算机的命令、监视键盘输入、数据显示以及提供传感器的驱动之外,还有一条很重要的作用就是计算,即把从传感器读取来的电压值根据预先标定好的存储在单片机内部的参数,通过解方程计算得到角度量。
主函数内容精简,只做了一些必要的系统配置,如单片机时钟、看门狗、I/O口设置、特殊功能选择、UART初始化、显示开机画面等,完成这些工作后,系统进入低功耗模式,等待中断。
单片机软件流程如图3所示。
212 计算机软件设计系统除了可以用主控模块操作和显示外,还可以通过异步串口在计算机上进行控制、显示和数据记录,以.txt文件记录数据,便于进一步数据处理,并在软件界面上实时绘出测量曲线,图3 单片机软件流程图便于监视。
基本测量流程如图4所示。
图4 基本测量流程3 传感器标定与非线性补偿311 传感器标定选择了双频激光干涉仪作为微小角度传感器的标定比对工具。
水平仪与激光干涉测角系统同时测量一个角度变化量,从而形成水平仪输出与角度变化量的关系曲线。
得到原始数据后,针对该传感器的非线性,对曲线进行了三阶拟合,得到了理想(与分辨力相同)的拟合精度,在实际的测量中也达到了设计的要求。
图5 三阶多项式拟合曲线图(下转第77页) 第12期石成华等:智能阀门定位器EP A 高速通信模块的开发77 的计算基于Allan 方差公式。
PTP 方差公式:σ2PTP=τ2×σ2y3图4 状态决定算法将A llan 方差公式代入,得PTP 方差计算公式:σ2PTP=13[12(N -2)ΣN -2k =1(x k +2-2x k +1+x k )2]式中x k 、x k +1和x k +2分别为t k 、t k +τ和t k +2τ时刻测量的时间差,对于PTP 方差而言,采样周期τ就是同步时间间隔。
3 通信测试针对EP A 通信模块进行网络吞吐量测试,测试结果表明:当帧值小于500byte 时,网络吞吐量为7179~8167M bit/s,当帧值大于500byte 时,网络吞吐量大于9191Mbit/s,数据传输效果与理论值接近。
设网络吞吐量为N M bit/s,则非实时通信带宽为N 0=N (T -T n )T因此可以计算出非实时通信带宽比例。
当帧值为64byte 时,非实时通信仅占3811%;当帧值大于1024byte 时,非实时通信比例逐渐趋近于50%。
4 结束语采用AR M7处理器AT91R40008和AX88796网卡芯片制作EP A 通信模块,为智能阀门定位器提供了一种全新的工业以太网解决方案。
具有较高的定位精度、实时性和通用性。
参考文献:[1] 王田苗.嵌入式系统设计与实例开发.北京:清华大学出版社,2003.[2] 褚健,金建祥.用于工业测量与控制系统的EP A 系统结构与通讯标准.北京:中国标准出版社,2005.[3] 王平,谢昊飞,向敏,等.工业以太网技术.北京:科学出版社,2007:123-141.[4] TheinstituteofElectricalandElectr onicsEngneers .I nc,I EEE1588T M,2002作者简介:石成华(1981—),工程师,主要研究方向为工业自动化仪表、现场总线、嵌入式系统等。
E 2mail:Shichenghua 20018@(上接第74页)312 软件非线性补偿方法由于系统采用单片机作为微处理,因此为保证非线性补偿的实时性,不使CP U 进行长时间的复杂运算,采用线性插值法来实现对测量系统的非线性实时补偿。
根据拟合结果得出传感器的输入-输出特性曲线图,结合精度的要求,把传感器输出特性曲线分成n 段,可得到分段点的坐标(x 0,y 0)、(x 1,y 1)、…、(x n ,y n ),实际测量过程中,检测量x 必会落在某一段(x i ,x i +1)内,即x i <x <x i +1。