信号系统-44
精选列车运行控制系统44列控地面设备CBTC地面设备
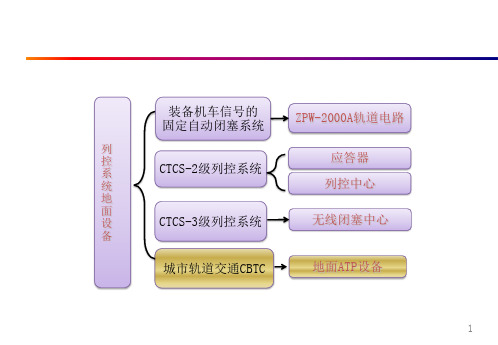
一、系统组成
ATS系统 ATS系统主要实现对列车运行的监督和指挥,辅助调度任意对全线列车进行管理,ATS包括控制中心和车站设备。 基本功能包括:列车识别和跟踪、运行图管理、列车进路办理、在线列车冲突管理、列车运行自动调整、扣车、跳车、临时限速等。
联锁系统 轨道空闲处理、进路控制、道岔控制和信号控制功能是CI子系统的主要功能。进路控制功能负责整条进路的排列、锁闭、保持和解锁。道岔控制功能负责道岔的解锁、转换、锁闭和监督。这些动作是对ATS子系统命令的响应。信号控制功能负责监督轨道旁信号机的状态,并根据进路、轨道区段、道岔和其它轨旁信号机的状态来控制信号机。 它根据来自ATS的命令设置信号机何时为停车显示。它也产生命令输出,ATC系统以此来控制列车从一个进路行驶到另一进路。
CBTC系统是指通过无线通信的方式实现列车和地面间连续通信的列车控制系统。系统的核心部分为轨旁和车载两部分。 列车通过机车上的测速传感器和线路上的应答器来得到列车的实时位置,应答器在线路的固定位置设置,列车每经过一个应答器就会在数据库中查找其位置,从而得到列车的精确位置,列车的实时速度是通过测速传感器获得的,速度对时间的积分获得列车的相对位移,每经过一个应答器的实际位置加上相对该应答器的相对位移就可以实时的获得列车的准确位置。VOBC将列车的准确位置通过WLAN发送给轨旁设备,实现列车对地面设备的通信。 轨旁的核心设备是区域控制器ZC,它负责管态(道岔、屏蔽门、紧急停车按钮、计轴区段等),向地面ATP系统发送障碍物信息及联锁的进路信息。(4)确定行车许可的计算范围。地面ATP接收到联锁的进路信息、障碍物信息,根据列车在线路上的位置信息,确定列车当前能够使用的进路范围。 如下图所示,列车运行在进路R1上,进路R2、R3均已排列,地面ATP通过线路上列车运行情况及信号机的接近区段情况判断该车为最接近进路R2和R3的受控制的列车,将进路R1、R2、R3均分配给该列车使用,这样就确定了为该列车计算行车许可需要考虑的范围。
信号与系统课后题答案

《信号与系统》课程习题与解答第二章习题(教材上册第二章p81-p87)2-1,2-4~2-10,2-12~2-15,2-17~2-21,2-23,2-24第二章习题解答2-1 对下图所示电路图分别列写求电压的微分方程表示。
图(a):微分方程:11222012()2()1()()()2()()()()2()()()c cc di t i t u t e t dtdi t i t u t dtdi t u t dt du t i t i t dt ⎧+*+=⎪⎪⎪+=⎪⇒⎨⎪=⎪⎪⎪=-⎩图(b ):微分方程:⎪⎪⎪⎩⎪⎪⎪⎨⎧-==+++=+++⎰⎰2021'2'21'2'11)(01)(1Ri t v Ri Mi Li dt i Ct e Ri Mi Li dt i C)()(1)(2)()2()(2)()(33020022203304422t e dtd MR t v C t v dt d C R t v dt d C L R t v dt d RL t v dt d M L =+++++-⇒ 图(c)微分方程:dt i C i L t v ⎰==211'101)(⎪⎪⎪⎩⎪⎪⎪⎨⎧===⇒⎰dt t v L i t v L i dtdt v L i dt d)(1)(1)(10110'1122011∵ )(122111213t i dt d L C i i i i +=+=)(0(1]1[][101011022110331t e dt dR t v RL v dt d RR L C v dt d R C R C v dt d CC μ=+++++⇒图(d)微分方程:⎪⎩⎪⎨⎧+-=++=⎰)()()()()(1)()(11111t e t Ri t v t v dt t i C t Ri t e μRC v dt d 1)1(1+-⇒μ)(11t e V CR = ∵)()(10t v t v μ=)()(1)1(0'0t e R v t v R Cv v =+-⇒2-4 已知系统相应的其次方程及其对应的0+状态条件,求系统的零输入响应。
信号与系统-44-定积分

积分上限 [a , b] 称为积分区间
b
n
a
f
( x) dx
li限 被 积 函 数
被积 积分 表变 达量
积 分 和
式
定积分仅与被积函数及积分区间有关 , 而与积分
变量用什么字母表示无关 , 即
b a
f
(x)
dx
b a
f
(t)
d
t
b a
f
(u)
d
u
*** 微积分基本定理 *** 定积分的计算法 *** 定积分的应用 *** 广义积分初步
第六章
*** 定积分的概念及性质
一、定积分问题举例 二、 定积分的定义 三、 定积分的性质
机动 目录 上页 下页 返回 结束
定积分的概念
曲边梯形的面积 设曲边梯形是由连续曲线
y f (x)
以及两直线 所围成 , 求其面积 A .
i
定积分定义
a x0 x1 x2 xn b ,
任意分法 任取
总趋于确定的极限 I ,则称此极限 I 为函数
上的定积分, 记作 b f (x) dx a
即
b a
f
(
x)
dx
lim
0
n
i1
f
(
i
)
xi
o
a x1
此时称 f ( x ) 在 [ a , b ] 上可积 .
在区间
i
x xi1xi b
A?
解决步骤 :
1) 分割. 在区间 [a , b] 中任意插入 n –1 个分点
a x0 x1 x2 xn1 xn b 用直线 x xi 将曲边梯形分成 n 个小曲边梯形;
2) 取近似. 在第i 个小曲边梯形上任取 i [xi1 , xi ] 作以[xi1 , xi ] 为底 , f (i ) y
城市轨道交通与信号系统测试 选择题 60题
1. 城市轨道交通系统中,信号系统的主要功能是什么?A. 提供乘客信息B. 控制列车的运行C. 管理车站设施D. 监控车辆状态2. 以下哪项不是城市轨道交通信号系统的组成部分?A. 联锁系统B. 列车自动控制系统C. 乘客信息系统D. 轨道电路3. 列车自动防护系统(ATP)的主要作用是什么?A. 提高列车速度B. 防止列车碰撞C. 增加列车载客量D. 减少列车维护成本4. 城市轨道交通中,联锁系统的主要功能是什么?A. 确保列车安全运行B. 提供列车运行信息C. 管理车站人员D. 监控车站设备5. 以下哪项技术不属于城市轨道交通信号系统?A. CBTC(基于通信的列车控制)B. ATC(列车自动控制)C. PIS(乘客信息系统)D. SCADA(监控与数据采集系统)6. 城市轨道交通信号系统中,轨道电路的主要作用是什么?A. 检测列车位置B. 提供乘客服务C. 管理车站设备D. 监控列车速度7. 列车自动控制系统(ATC)包括以下哪些子系统?A. ATP, ATO, ATSB. PIS, SCADA, CBTCC. CCTV, PA, FASD. OCC, PSC, TMS8. 城市轨道交通信号系统中,ATS(列车自动监控系统)的主要功能是什么?A. 控制列车运行B. 监控列车运行C. 管理车站设备D. 提供乘客信息9. 以下哪项技术不属于城市轨道交通信号系统的安全技术?A. 故障-安全原则B. 冗余设计C. 乘客信息显示D. 紧急制动系统10. 城市轨道交通信号系统中,ATO(列车自动运行系统)的主要功能是什么?A. 控制列车速度B. 防止列车碰撞C. 提供乘客服务D. 监控列车运行11. 城市轨道交通信号系统中,CBTC(基于通信的列车控制)系统的优势是什么?A. 提高列车速度B. 减少系统复杂性C. 增加系统可靠性D. 降低列车运行成本12. 城市轨道交通信号系统中,联锁系统的基本要求是什么?A. 确保列车安全B. 提供乘客服务C. 管理车站设备D. 监控列车速度13. 城市轨道交通信号系统中,ATP(列车自动防护系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理14. 城市轨道交通信号系统中,ATS(列车自动监控系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理15. 城市轨道交通信号系统中,ATO(列车自动运行系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理16. 城市轨道交通信号系统中,CBTC(基于通信的列车控制)系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理17. 城市轨道交通信号系统中,联锁系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理18. 城市轨道交通信号系统中,ATP(列车自动防护系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理19. 城市轨道交通信号系统中,ATS(列车自动监控系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理20. 城市轨道交通信号系统中,ATO(列车自动运行系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理21. 城市轨道交通信号系统中,CBTC(基于通信的列车控制)系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理22. 城市轨道交通信号系统中,联锁系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理23. 城市轨道交通信号系统中,ATP(列车自动防护系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理24. 城市轨道交通信号系统中,ATS(列车自动监控系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理25. 城市轨道交通信号系统中,ATO(列车自动运行系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理26. 城市轨道交通信号系统中,CBTC(基于通信的列车控制)系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理27. 城市轨道交通信号系统中,联锁系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理28. 城市轨道交通信号系统中,ATP(列车自动防护系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理29. 城市轨道交通信号系统中,ATS(列车自动监控系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理30. 城市轨道交通信号系统中,ATO(列车自动运行系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路D. 基于车站管理31. 城市轨道交通信号系统中,CBTC(基于通信的列车控制)系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理32. 城市轨道交通信号系统中,联锁系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理33. 城市轨道交通信号系统中,ATP(列车自动防护系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理34. 城市轨道交通信号系统中,ATS(列车自动监控系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理35. 城市轨道交通信号系统中,ATO(列车自动运行系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理36. 城市轨道交通信号系统中,CBTC(基于通信的列车控制)系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理37. 城市轨道交通信号系统中,联锁系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息38. 城市轨道交通信号系统中,ATP(列车自动防护系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理39. 城市轨道交通信号系统中,ATS(列车自动监控系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理40. 城市轨道交通信号系统中,ATO(列车自动运行系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理41. 城市轨道交通信号系统中,CBTC(基于通信的列车控制)系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理42. 城市轨道交通信号系统中,联锁系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理43. 城市轨道交通信号系统中,ATP(列车自动防护系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理44. 城市轨道交通信号系统中,ATS(列车自动监控系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理45. 城市轨道交通信号系统中,ATO(列车自动运行系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理46. 城市轨道交通信号系统中,CBTC(基于通信的列车控制)系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理47. 城市轨道交通信号系统中,联锁系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理48. 城市轨道交通信号系统中,ATP(列车自动防护系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理49. 城市轨道交通信号系统中,ATS(列车自动监控系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理50. 城市轨道交通信号系统中,ATO(列车自动运行系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理51. 城市轨道交通信号系统中,CBTC(基于通信的列车控制)系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理52. 城市轨道交通信号系统中,联锁系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理53. 城市轨道交通信号系统中,ATP(列车自动防护系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理54. 城市轨道交通信号系统中,ATS(列车自动监控系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理55. 城市轨道交通信号系统中,ATO(列车自动运行系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理56. 城市轨道交通信号系统中,CBTC(基于通信的列车控制)系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理57. 城市轨道交通信号系统中,联锁系统的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理58. 城市轨道交通信号系统中,ATP(列车自动防护系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理59. 城市轨道交通信号系统中,ATS(列车自动监控系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理60. 城市轨道交通信号系统中,ATO(列车自动运行系统)的主要技术特点是什么?A. 基于通信B. 基于轨道电路C. 基于乘客信息D. 基于车站管理答案1. B2. C3. B4. A5. D6. A7. A8. B9. C10. A11. C12. A13. B14. A15. A16. A17. B18. B19. A20. A21. A22. B23. B24. A25. A26. A27. B28. B29. A30. A31. A32. B33. B34. A35. A36. A37. B38. B39. A40. A41. A42. B43. B44. A45. A46. A47. B48. B49. A50. A51. A52. B53. B54. A55. A56. A57. B58. B59. A60. A。
441kHz的数字音频系统无法满足人耳的听音需要
数字音频音质剖析之一:数字音频探秘(上)许多年前,就有人开始议论关于16-bit,44.1 kHz的数字音频系统无法满足人耳的听音需要,无法真实地再现原有的声音。
从理论上来讲,这种数字音频格式可以为我们提供0 Hz到22.05 kHz的带宽和96 dB的动态范围。
(带宽即指频率带的范围。
通常,人类听觉的带宽为20到20,000 Hz。
动态范围则是指音频系统所能够提供的音量最大的声音与音量最小的声音之间差距。
要注意有些设备制造厂商在宣传中的措辞。
动态范围与信噪比不是一码事。
信噪比是指通常的工作电平或是名义上的工作电平与噪声电平之比。
这个指标通常都要小于动态范围的值。
)那么,我们为什么经常会听到说这种数字音频格式无法满足"金耳朵"的需要呢?他们这些人究竟感觉到了什么与众不同的东西呢?为了搞清楚这个问题,我们首先要回过头来温习一下数字音频的工作原理。
好,拿出你的二进制计算器,喝点儿富含咖啡因的饮料提提神儿,然后我们要回到数字音频学校中去了!—基础知识数字音频系统是通过将声波波形转换成一串数据来再现原始声音的。
实现这个步骤使用的设备是模/数转换器(A/D),它给声波拍下许多个"快照"(即进行采样),每一张快照都记录下了原始模拟声波的某一时刻的电压值,将一连串这样的快照连接起来,就形成了声波的振幅(即音量或是音量电平)。
每一秒钟所拍摄的快照数目就称为采样频率(或称采样率),采样频率的单位是Hz (赫兹,即每秒钟多少次)。
采样频率是决定频率响应方面最重要的因素,其他因素均没有它的影响大(其他的因素我们将在下面进行讨论)。
系统中量化精度的bit数目直接决定了采用多少个"台阶"来表示声波振幅的范围(即动态范围)。
每增加一个bit,表示声波振幅的台阶数就要翻一番,并且增加6 dB的动态范围。
由此可以计算出,一个1-bit的数字音频系统可以为我们提供两个台阶,即6 dB的动态范围。
信号系统分析

信号系统分析概述:1.为什么要学习本课程?本课程是继电路分析课程后的一门基础理论课,对电类专业又是一门较重要的课程,先前我们所学过的电路分析课程所分析的信号无非是直流和正弦交流信号,所分析的电路最高不过是二阶电路。
而在信号与系统分析中,所分析的信号有指数、斜坡、脉冲、冲激等一些复杂的信号,所分析的电路也不局限于二阶及以下系统,而可以是二阶以上高阶系统。
除此外,信号分析要研究分析信号机系统的频率特性,这对于通信及自控专业很重要。
2.本课程特点:以数学理论为分析依据,愈来愈多地运用了现代数学的概念和方法,对系统进行时域及时域分析,把分析问题与其数学表述和论证密切地结合起来。
其分析所应用的数学工具有:傅里叶级数、积分变换、Z变换、线性常微分方程、级数等。
3.课程任务:(1)确定线性、非时变连续时间系统和离散实践系统相应的各种方法。
(2)研究信号的频率特性(频谱分析)和分析信号的频率特性与时间特性的联系。
第1章连续时间信号与系统的时域分析1.1信号的定义与分类一、信号的基本概念1.信息:通过文字、语言、图像及数据所表达的思想和概念,代表一个新鲜的事物,消息和事件,是一门科学。
2.信号:是携带信息的一种物理量,是信息的表现形式和运载工具。
研究信号的目的在于了解各种信号(电信号)的组成变化的规律,以便传输和处理信号。
二、信号的分类*按时间函数的确定性分为1.确定信号与随机信号A.确定信号:对确定的时间信号又确定的数值,它包括连续时间信号周期信号 f(t)=f(t+nt) n=o±1非周期信号准周期信号(概周期)离散时间信号:某此离散点上,具有不确定的数值。
B.随机信号:对任何时间都无确定的信号数值,也即信号的温度及出现时间是不可预测的。
*按时间函数取值的连续性分为2.连续时间信号与离散时间信号*按时间函数的可积性划分3.能量信号与功率信号能量信号:能量为有限值的信号功率信号:功率为有限值的信号1.2信号的描绘与运算1.2.1常用基本信号及其性质1.直流信号:f(t)=A -≦<t<≦ A为常数2.正弦信号:f(t)=Ksin(ωt+ф) -≦<t<≦正弦与余弦函数统称为正弦信号三要素:振幅k, 角频率ω, 初相角фT=2л/ω=f/13.单位阶跃信号1 t>0u(t)=0 t<0且有u(-t-t1)-u(-t-t2)=u(t+t2)-u(t+t1)特点:具有单边特性(开关特性)门函数(窗函数):存在一段区间f(t)=u(t+t0)-u(t-t0)4.指数信号f(t)=ke at -≦<t<≦5.复指数函数f(t)=ke st设s=δjω (复频率)f(t)=ke(δ+jω)t=keδt•e jω)t=keδt cosωt+jkeδt sinωt其中Re(ke st)=keδt cosωt; I m(ke st)=keδt sinωt6.正、负号信号 1 t>0Sgn(t)=-1 t<07.单位斜坡信号 t t>0R(t)= 或R(t)=tu(t)0 t<0且有u(t)=(d/dt)R(t)8.单位冲激信号δ(t)理想信号:数量无限大作用时间无限短的物理量如冲量 f•Δt ;电容器充电 ic•Δt=Q (常量)例如:理想电容器充电无限小时间内通过无限大电将电容器充满u c(t)=1v Q=cv=1库电容电压可看为图(a)i c=c(du s/dt)导数不存在,可看作(b)图中τ→0的情况. (c)图中i c=(du c/dt)为一方波,面积代表电荷,不论τ为何值Q=1,令τ→0,则i c→≦ Q=1i c则表示一冲激δ(t)代表一个冲激性的物理量。
城市轨道交通信号系统的组成
地面设备系统包括车站信号设备和轨旁线路层设备。 车站分为设备集中站和非设备集中站。设备集中站一般为有道岔车站。 设备集中站设有车 站ATS分机、车站联锁设备、ATP/ATO系统地面设备、电源设备、维修终端、信号机、转辙机、 列车检测设备、发车指示器、紧急停车(关闭)按钮、自动折返按钮等。各设备分设于车站控制室、 车站信号设备室、车站站台层及轨旁线路层。非设备集中站设有发车指示器、紧急停车(关闭)按 钮等。
城市轨道交通信号控制系统的设备分布
(三)车载设备系统
车载设备系统即车载ATP/ATO计算机单元,用来接收轨旁设备传送的ATP/ATO信息,计算 列车运行曲线,测量列车的运行速度及走行距离,实现列车运行超速防护及列车自动运行,保 证行车安全和为列车提供最佳运行方式。每套车载ATC设备包括车载ATP/ATO计算机单元、司 机盘、人机界面、测速传感器、定位补偿设备、发送/接收天线、应答器(信标)天线等车-地通信 设备。
图1-8 ATO系统车载设备
城市轨道交通信号控制系统的设备分布
城市轨道交通信号控制系统的设备按地域分布一般可分为四 部分:控制中心系统、地面设备系统、车载设备系统、车辆基地 系统等,有时还包括维护及培训中心设备。
城市轨道交通信号控制系统的设备分布
(一)控制中心系统
控制中心设备属于ATS子系统,是ATC的核心。ATS子系统通过数据通信网络与其他子系统 交换数据和命令。中央ATS系统主要配置ATS中央计算机系统、主任/调度员工作站、运行图工 作站、维护工作站、DCS ( Data Communication System )数据通信设备、运行综合显示屏接 口服务器、与其他系统接口的通信服务器,培训工作站,电源设备等,以及报告输出和系统运 行状态信息打印设备和运行综合显示屏,各设备分设于中央控制室、信号ATC设备室、运行图编 辑室、培训室以及控制中心信号电源室中。
汽车信号系统

三、转向系统电路分析
❖电路特点
➢ 转向信号灯是在点火开关处于 工作挡运行时使用。
➢ 危险报警灯的使用场合有:本 车有故障或危险不能行使;本
车有牵引别车的任务,需要别
车注意;本车需优先通过,需
别车回避。危险报警灯直接由
电源供电。不受车灯开关和点 火开关的控制。
➢ 为了检测转向灯泡是否烧坏,
常在转向闪光器中设有检测装
置。如有转向灯泡烧坏,则使
转向信号及指示灯的频率明显
加快或变慢用以提醒驾驶员更
换灯泡。
汽车信号系统
三、转向系统电路分析
图-柴油载货汽车 信号系统电路
1-闪光器; 2-熔断器; 3-蓄电池; 4-起动机; 5-电流表; 6-制动灯; 7-制动灯开关; 8-倒车蜂鸣器; 9-倒车灯; 10-倒挡开关; 11-左转向灯; 12-转向开关; 13-右转向灯; 14-喇叭继电器; 15-喇叭按钮; 16-喇叭
汽车信号系统
倒车雷达探头(实物)
汽车信号系统
倒车雷达传感器
汽车信号系统
喇叭分类
按发音动力的不同分为气喇叭和电喇叭 按外形不同分为螺旋形、盆型和筒形 按声频高低分为高音和低音
汽车信号系统
电喇叭
❖ 电喇叭按照有无触点分为 普通电喇叭和电子电喇叭
❖ 筒型普通电喇叭
1-下铁心;2-线圈;3-上铁心;4-膜片; 5-共鸣板;6-衔铁;7-触点;8-调整螺钉;
转向信号灯(实物)
汽车信号系统
位灯(示宽灯)
汽车信号系统
位灯(尾灯)
汽车信号系统
返回
示廓灯
汽车信号系统
返回
制动灯
汽车信号系统
返回
倒车灯
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
E f1 ( t ) 0
(0 t ) ( t T )
1 F ( s) F1 ( s) 1 e sT
E 1 e s F ( s) S 1 e sT
E[U (t ) U (t )]
E F1 (s) (1 e s τ) s
at
: (a, ) : (, a )
双边拉普拉斯变换的收敛域
F (s) f (t )est dt
: ( , ) : ( , )
1 j st f (t ) F ( s ) e ds 2j j
s j
4.3.2、时移性:
若f(t)U(t) F(s), 则
f(t t0 ) F ( s)e st0
例1:用延时性求F(s),
f (t ) etU (t 2)
2 (t 2) 解 f (t ) e e U (t 2)
e 2 2 s F ( s) e s1
1 e j0t e j0t u (t ) 2j
1 1 1 0 F ( s) 2 2 2 j s j0 s j0 s 0
4.3.4、尺度变换性:
若f(t) F(s),则
f(at)
1 s F( ) a a
x(t ) x(s), ROC R
F ( s ) e U (t )e dt e ( s a )t dt
at
1 sa
: (, a )
即反因果信号f (t)U (–t)的LT的收敛 区为s平面上某一左半开平面。
1 e U (t ) sa 1 at e U ( t ) sa
F[ f (t )e
t
]
f (t )e t e jt dt F (s)
对 f(t)e-t求傅里叶反变换可推出
1 jt f (t )e F ( s ) e d 2 1 t jt f (t ) F ( s ) e e d 2 ds 因为 s j 所以 d j 当 s j
f (t )e s0t F ( s
s0 )
例 求e t cos(0t )u (t )的拉氏变换。
解:
s cos(0t )U (t) s 2 2 0
t
e
cos(0t )U (t )
s 2 ( s )2 0
对于e t sin(0t )u (t ),同样
f (t )
1 2 j
j j
F ( s )e ds
L
st
f (t ) L [ F (s)]
1
f (t ) F (s)
物理意义: 信号f(t)可分解成复指数est的线性组合 F(s)为单位带宽内各谐波的合成振幅,是密度函数。 s是复数称为复频率,F(s)称复频谱。
F[ f (t )e
t
]
f (t )e e
t jt
( j )t f ( t ) e dt dt
令s= +j
f (t )e st dt F (s)
定义: F (s)
f (t )est dt
拉普拉斯正变换
F(s)称为f (t)的像函数, 而f (t)称为F(s)的原函数。
例2: 求图示信号的拉氏变换。
解
f (t ) tU (t )
1 s2
f1 (t ) (t t0 )U (t t0 ) f 2 (t ) (t t0 )U (t )
1 st0 e 2 s
1 1 t0 2 s s
例3: 求周期矩形脉冲信号的拉氏变换。 t
0
【解】设
sin 0 t U (t )
0
e
j0 t
e 2j
j0t
U (t )
0 1 1 1 ( ) 2 2 2 j s j0 s j0 s 0
0
(t ), ( n) (t )
L[ (t )] (t )e st dt
' ' st
第四章 连续信号与系统的复频域分析 x(t)=est y(t)=H(s)est
s
h(t)
H ( s) h( )e d
F ( )
1 f (t ) 2
f (t )e jt dt
F ( )e jt d
从傅里叶变换到拉普拉斯变换
f (t)=eatU(t) >0的傅里叶变换?
t
ROC包括R {Re{s} 0}
4.3.5、时域卷积定理:若 则
f 1 (t ) F1 ( s )
f 2 (t ) F2 ( s)
f1 (t ) * f 2 (t ) F1 (s)F2 (s)
f 1 (t ) F1 ( s )
f 2 (t ) F2 ( s)
原函数f (t)定义在无限时间区间,称为双边拉氏变换。 把f (t)的拉氏变换存在的 取值范围称为LT的收敛区。 在给出拉氏变换的同时,必须给出其相应的收敛区。
f (t ) F (s)
: ( , )
j 左半平面
S平面 收 敛 α 区 β 右半平面
1.收敛域是平行于j轴的带状区域
1 s
( n)
(t )
s
n
1 s2
n! s n 1
3. e U(t) -e-at U(t)
te-at U(t )
t e U(t )
n -at
-at
1 sa 1 sa 1 ( s a )2 n! ( s a) n 1
4. cos 0 tU(t)
s s 2 0 2
sin 0 tU ( t )
F ( s ) [U (t ) U (t )]e st dt
s 1 e st 0 e dt s
: (, )
即时限信号f (t)的LT F(s)的收敛区为s全平面。
常用信号的拉氏变换 1. (t ) 1 (t ) s
2. U (t ) tU (t ) t nU (t )
α < <β 称收敛条件
2.收敛域内不含任何极点
3.右边信号的收敛域是最大极点的右侧 4.左边信号的收敛域是最小极点左侧 5.双边信号的收敛域是带状区域 6.时限信号的收敛域是整个S平面
例4.3;例4.4;例4.5
例4.7:求时限信号f (t)=U(t)–U(t–)的双边拉氏变换及其收敛 区。式中, >0。 解:
拉氏变换与傅氏变换的关系
• LT是FT的推广,FT则是LT在 =0时的特殊情况。 • FT: 实频率, 是振荡频率 • LT: 复频率s, 是振荡频率,控制衰减速度
傅立叶变换的局限性
1、某些信号存在傅立叶变换,但从傅立叶定义不能直接求出; 2、某些信号不存在傅立叶变换,但存在拉氏变换,如e2tU(t); 3、傅立叶变换只能求系统的零状态响应,而拉氏变换可以求全响应; 4、傅立叶变换只能分析稳定系统,拉氏变换可以分析不稳定系统。
0 sin(0t )U (t ) 2 s 0 2
e
t
0 sin(0t )U (t ) ( s )2 0 2
4.3.6、时域微分
若
则
x(t ) X ( s ), ROC R
dx(t ) sX ( s), dt
ROC包括R
4.3.8、s域微分
例:信号 f (t ) e U (t ) ,求LT。
解: 根据拉氏变换的定义得
at
F (s) e U (t )e dt e
at st 0
( s a )t
dt
由于 s= +j,该积分要存在, 应满足 +a>0,即 >-a, 或Re[s]>-a。 于是
若
则
x(t ) X ( s ), ROC R
dX ( s ) tx(t ) , ROC = R ds
k d X (s) k (t ) x(t ) , k ds
4.3. X ( s ), ROC R
1 x ( ) d X ( s ), s
不存在!
将f(t)乘以衰减因子e-σt
F[ f (t )e
t
]
f (t )e e
t jt
dt e e
0
t ( j )t 0
dt
令s j
若
e ( s )t dt
1 s
4-1 连续信号双边拉普拉斯变换
1
Re(s)
d st L[ (t )] (t )e dt (e ) t 0 s dt n d L[ ( n ) (t )] ( n ) (t )e st dt (1)n n (e st ) s n t 0 dt
解:
-
(2) f2 (t ) U (t )
st
(1) F1 (s) (t )e dt 1
st st - 0
:( , )
:(0, )
(2) F2 ( s) U (t )e dt
1 e dt s
正弦信号
e j0t e j0t cos 0 t U (t ) U (t ) 2 1 1 1 s ( ) 2 2 2 s j0 s j0 s 0