自动控制原理习题解答Ch5
自动控制原理第五章习题及答案

第五章习题与解答5-1试求题5-1图(a)、(b)网络的频率特性。
u r R1u cR2CR2R1u r u c(a) (b)题5-1图R-C网络解(a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(RRCRRTCRRRRKsTsKsCRsCRRRsUsUrcττωωτωωωωω11121212121)1()()()(jTjKCRRjRRCRRjRjUjUjGrca++=+++==(b)依图:⎩⎨⎧+==++=+++=CRRTCRsTssCRRsCRsUsUrc)(1111)()(2122222212ττωωτωωωωω2221211)(11)()()(jTjCRRjCRjjUjUjGrcb++=+++==5-2某系统结构图如题5-2图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(tcs和稳态误差)(tes(1)tt r2sin)(=(2))452cos(2)30sin()(︒--︒+=ttt r题5-2图反馈控制系统结构图解 系统闭环传递函数为: 21)(+=Φs s 频率特性:2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时,2=ω,r m =1则 ,35.081)(2==Φ=ωωj 45)22arctan()2(-=-=j ϕ4.1862arctan )2(,79.085)(2====Φ=j j e e ϕωω )452sin(35.0)2sin()2(-=-Φ=t t j r c m ss ϕ)4.182sin(79.0)2sin()2(+=-Φ=t t j r e e e m ss ϕ(2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5.26)21arctan()1(45.055)1(-=-===Φj j ϕ 4.18)31arctan()1(63.0510)1(====Φj j e e ϕ )]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t c m m ss ϕϕ+-⋅Φ-++⋅Φ=)902cos(7.0)4.3sin(4.0--+=t t)]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t e e e m e e m ss ϕϕ+-⋅Φ-++⋅Φ=)6.262cos(58.1)4.48sin(63.0--+=t t5-3 若系统单位阶跃响应h t e e t tt ()..=-+≥--11808049试求系统频率特性。
自动控制原理习题答案详解
自动控制原理习题答案详解自动控制原理习题详解(上册)第一章习题解答1-2日常生活中反馈无处不在。
人的眼、耳、鼻和各种感觉、触觉器官都是起反馈作用的器官。
试以驾车行驶和伸手取物过程为例,说明人的眼、脑在其中所起的反馈和控制作用。
答:在驾车行驶和伸手取物过程的过程中,人眼和人脑的作用分别如同控制系统中的测量反馈装置和控制器。
在车辆在行驶过程中,司机需要观察道路和行人情况的变化,经大脑处理后,不断对驾驶动作进行调整,才能安全地到达目的地。
同样,人在取物的过程中,需要根据观察到的人手和所取物体间相对位置的变化,调整手的动作姿势,最终拿到物体。
可以想象蒙上双眼取物的困难程度,即使物体的方位已知。
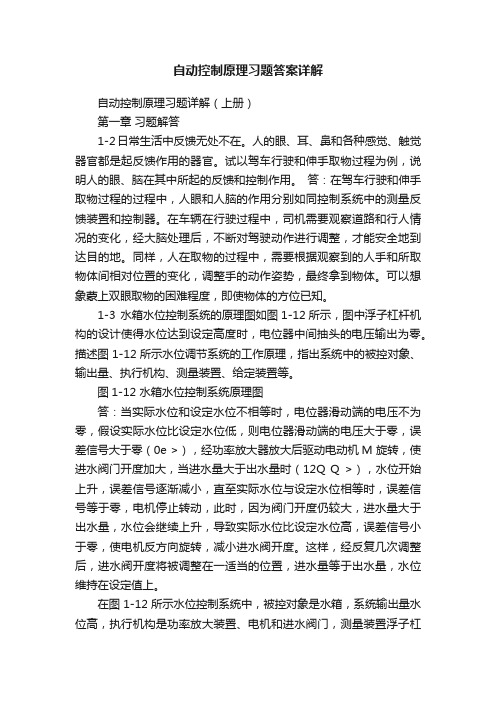
1-3 水箱水位控制系统的原理图如图1-12所示,图中浮子杠杆机构的设计使得水位达到设定高度时,电位器中间抽头的电压输出为零。
描述图1-12所示水位调节系统的工作原理,指出系统中的被控对象、输出量、执行机构、测量装置、给定装置等。
图1-12 水箱水位控制系统原理图答:当实际水位和设定水位不相等时,电位器滑动端的电压不为零,假设实际水位比设定水位低,则电位器滑动端的电压大于零,误差信号大于零(0e >),经功率放大器放大后驱动电动机M 旋转,使进水阀门开度加大,当进水量大于出水量时(12Q Q >),水位开始上升,误差信号逐渐减小,直至实际水位与设定水位相等时,误差信号等于零,电机停止转动,此时,因为阀门开度仍较大,进水量大于出水量,水位会继续上升,导致实际水位比设定水位高,误差信号小于零,使电机反方向旋转,减小进水阀开度。
这样,经反复几次调整后,进水阀开度将被调整在一适当的位置,进水量等于出水量,水位维持在设定值上。
在图1-12所示水位控制系统中,被控对象是水箱,系统输出量水位高,执行机构是功率放大装置、电机和进水阀门,测量装置浮子杠杆机构,给定和比较装置由电位器来完成。
1-4 工作台位置液压控制系统如图1-13所示,该系统可以使工作台按照给定电位器设定的规律运动。
任彦硕《自动控制原理》全部答案

R1
R2
+
1 sC2
Ur (s) R1C2s
(d)
Ur (s) R1
=
Uc (s)
( R2
//
1 sC2
)
⇒ T(s) = Uc(s) Ur (s)
=
R2 R1
1 R2C2s +1
题 2-2:试用运算法建立题 2-2 图所示 LC、RLC 电网络的动态结构图,并求解
自 u i (t) 至 u o (t) 信号传输的传递函数。
b)
R 2 uc(t) C2 −
R1 u r(t)
Rb
R2 C2
− +
c)
− uc(t)
R1 u r(t)
Rb
题 2-1 图 电网络
C3 R3 C2 R2
− +
d)
− uc(t)
(a) T (s) = Uc (s) =
R2
+
1 sC2
=
R2C1C2s + C1
Ur (s)
R1
+
R2
+
1 sC1
+
1 sC2
−
Ms2
X1(s)
=
ms2
X
2
⇒ X1(s) =
ms2 + ks + f
F (s) s2[Mms2 + (M + m)ks + (M + m) f ]
(b)
⎧ ⎪⎪m ⎨
⎪ ⎪⎩
f1
d 2 x1(t) + dt 2
d[x1(t) − dt
f1
d[
x1
(t) − dt
自动控制原理答案完全版_第二版
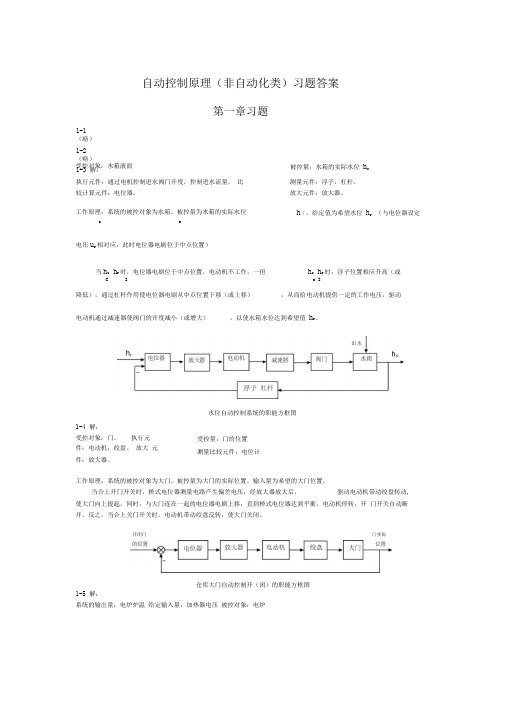
自动控制原理(非自动化类)习题答案第一章习题被控量:水箱的实际水位 h c执行元件:通过电机控制进水阀门开度,控制进水流量。
比较计算元件:电位器。
h 「。
给定值为希望水位 h r (与电位器设定cr电压u r 相对应,此时电位器电刷位于中点位置)当h c h r 时,电位器电刷位于中点位置,电动机不工作。
一但h c h r 时,浮子位置相应升高(或CIc I降低),通过杠杆作用使电位器电刷从中点位置下移(或上移) ,从而给电动机提供一定的工作电压,驱动电动机通过减速器使阀门的开度减小(或增大),以使水箱水位达到希望值 h r 。
水位自动控制系统的职能方框图受控量:门的位置 测量比较元件:电位计工作原理:系统的被控对象为大门。
被控量为大门的实际位置。
输入量为希望的大门位置。
当合上开门开关时,桥式电位器测量电路产生偏差电压,经放大器放大后,驱动电动机带动绞盘转动,使大门向上提起。
同时,与大门连在一起的电位器电刷上移,直到桥式电位器达到平衡,电动机停转,开 门开关自动断开。
反之,当合上关门开关时,电动机带动绞盘反转,使大门关闭。
1-5 解:系统的输岀量:电炉炉温 给定输入量:加热器电压 被控对象:电炉1-1 (略) 1-2(略)1-3 解: 受控对象:水箱液面 测量元件:浮子,杠杆。
放大元件:放大器。
工作原理:系统的被控对象为水箱。
被控量为水箱的实际水位1-4 解:受控对象:门。
执行元件:电动机,绞盘。
放大 元件:放大器。
开闭门门实际仓库大门自动控制开(闭)的职能方框图放大元件:电压放大器,功率放大器,减速器比较元件:电位计测量元件:热电偶职能方框图:KK3 2 Ts (T 1)s s K1K 3电位器电压放大炉温热电偶第二章习题2-1解:对微分方程做拉氏变换:X,(s) R(s) C(s) N,(s)X 2 (s) Q X/s)X 3 (s) X2 (s) X5(s TsX4 (s) X 3 (s)X5 (s) X4 (s) K2 N2(s k 3 X5 (s) s2C (s) sC(s) C(s) / R(s) 功率放大加热器'电机电炉R(s)绘制上式各子方程的方块图如下图所示:C(s) / N i (s) C(s) / R(s),K 2K 3TSTs 3~~T 1)s 2s K 1K 32-2解:对微分方程做拉氏变换X i (s) K[R(s) C (s)] X 2 (s)sR(s)(s 1) X 3(s) X i (s) X 2 (s) (Ts 1)X 4 (s)X 3 (s) X 5 (s)C(s) X 4 (s) N (s) X 5 (s) (Ts 1) N(s)(b) C (s)字红R(s) 1 G 1G 3 G G 4 G 2 G 3 G 2G 4X3(s) 绘制上式各子方程的方块如下图:将方块图连接得出系统的动态结构图:..R(s)1(s 1):Ts 1)C(s)N (s) 02-3解:(过程略)K____________C(s) (s 1)<Js 1) (s 1XTs 1) K ____________ Ts 2(T s1)s (K 1)C(s) / N 2 (s)R(s) ms fs K(c)誤 R(s) G 2 G 1G 2 1 G-i G 2G-I (d 普 R(s)G 1 G 2 1 G 2G 3(e)R^ R(s)G 1G 2G 3G 4 1 G<|G 2 G 2G 3 G 3G 4 G 1G 2G 3G 4 2-4 解:(1)求 C/R ,令 N=0 KK K 3s(Ts 1) C (s) / R(s) G(s)1 G(s) 求C/N ,令R=0,向后移动单位反馈的比较点 K C(s) / N (s) (K n G n K 1 0 ) — J s 1 亠 K 1G(s)K 1K 2 K 3 Ts 2K i K 2 K 3K n K 3s K 1K 2 K 3G K 2 n2 一Ts 2s K 1K 2 K 3 Ts 1 s (2)要消除干扰对系统的影响C(s) / N (s) K n K3s K1K2 K3GnTs 2 s K 1K 2 K 3G n (s) KnsK 1K 22-5 解:(a ) (1 )系统的反馈回路有三个,所以有3L a L 1 L 2 L 3 a 1G 1G 2G 5 G 2G 3G 4 G 4G 2G 5三个回路两两接触,可得 1 L a 1 GG 2G 5 G 2G 3G 4 G 4G 2G 5(2) 有两条前向通道,且与两条回路均有接触,所以P P 2 G 1G 2G 3,11, 2 1(3) 闭环传递函数C/R 为GGG 3 11 G 1G 2G 5 G 2G 3G 4 G 4G 2G 5(b)(1) 系统的反馈回路有三个,所以有3L aa 1L 1L 3 G 1G 2 G 1 G 1三个回路均接触,可得 1 L a 1 G-i G 2 2G-)(2 )有四条前向通道,且与三条回路均有接触,所以R G 1G 2 , 11P 2G, 21PG2,3 1P 4G 1,41(3)闭环传递函数C/R 为C G 1G 2 G 1 G 2 GG-i G 2 G 2 R 1 G 1G 22G 1 1 G-|G 2 2G.2-6解:用梅逊公式求,有两个回路,且接触,可得1L a 1 GG 2G 3 G 2,可得第三章习题采用K 0 , K H 负反馈方法的闭环传递函数为1OK o要使过渡时间减小到原来的 0.1倍,要保证总的放大系数不变,则:(原放大系数为10,时间常数为0.2)3-2解:系统为欠阻尼二阶系统(书上改为“单位负反馈……”,“已知系统开环传递函数”)% e / 1 $100%100% 1C(s) G-|G 2G 3 G 2G 3 R(s) 1 G 1G 2G 3 G 2 C (s)(1 G 2 )G 3N 2 (s) 1 GG 2G 3 G 2 E(s) 1 G 2 G 2G 3 R(s) 1 G-|G 2G :3 G 2 E(s) C(s) (1 G 2 G N 2 (s)N 2 (s)1 G 1G 2G 3 G 2C (s) NQC(s) / R(s)C(s) 1 (1 GG 2G 3 G 2 ) 1N 3 (s) 1 G 1G 2G 3 G 2 E(s) C(s) G 2G 3 G 1G 2G 3 N 1 (s) N 1(s) 1 G 1G 2G 3 G 2E(s)C(s) 1N 3 (s)N 3 (s)3-1解:(原书改为G(s) 100.2s 1)(s)C(s) K G(s) R(s) 01 G(S )K H1 10K H 0.2s1 10K10K 。
《自动控制原理》习题及答案

《自动控制原理》习题解答(教学参考用书)自动控制原理教学组西北工业大学自动化学院2009年7月前言这本《自动控制原理习题解答》与西北工业大学自动化学院自动控制原理教学组编写(卢京潮主编)、西北工业大学出版社出版的国家教委“十一五”规划教材《自动控制原理》配套使用。
供任课教师在备课和批改作业时参考。
新的“十一五”规划教材是在原《自动控制原理》教材基础上经修改完成的,新教材基本保留了原教材的体系结构,主要在具体内容上作了进一步的完善和充实,习题也做了相应调整。
这本习题解答的内容主要由负责各章编写任务的老师提供。
为方便教学,在习题解答之后编入了课程进程表和教学大纲(96学时),供任课教师参考查阅。
对教材或习题解答中发现的错误和不妥之处,恳请各位读者及时记录,并转告编者,以便尽快纠正。
谢谢!。
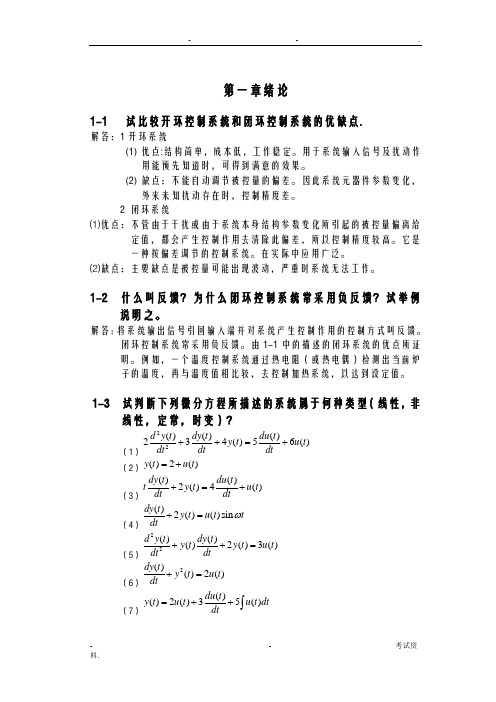
联系人:卢京潮电 话:88431302 (办公室)135******** (手机)Email: lujc0129@编者2009.5目录一.习题解答 (1)第1章习题及解答 (1)第2章习题及解答 (10)第3章习题及解答 (32)第4章习题及解答 (64)第5章习题及解答 (86)第6章习题及解答 (133)第7章习题及解答 (157)第8章习题及解答 (181)二.课程进程表 (208)三.自动控制原理教学大纲 ( 96时) (210)一、 习 题 及 解 答第1章习题及解答1-1 根据图1-15所示的电动机速度控制系统工作原理图,完成:(1) 将a ,b 与c ,d 用线连接成负反馈状态;(2) 画出系统方框图。
解 (1)负反馈连接方式为:,d a ↔c b ↔;(2)系统方框图如图解1-1 所示。
1-2 图1-16是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开、闭的工作原理,并画出系统方框图。
图1-16 仓库大门自动开闭控制系统解 当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。
《自动控制原理》第五章习题解答

2 ωn s( s + 2ζω n )
G( s) =
当取 r (t ) = 2 sin t 时,系统的稳态输出
css (t ) = 2 sin(t − 450 )
试确定系统参数 ω n , ζ 。 解:根据公式(5-16)和公式(5-17) 得到: c ss (t ) = A G B ( jω ) sin(ωt + ϕ + ∠G B ( jω ))
根据题目给定的条件: ω = 1 A = 2 所以: G B ( jω ) =
2 (ω n − ω 2 ) + (2ζω nω ) 2
=
=1
(1)
∠G B ( jω ) = − arctan
2ξω nω 2ξω = − arctan 2 n = −45 0 2 2 ωn − ω ωn −1
(2)
由式(1)得 ω n = (ω n − 1) + ( 2ζω n )
20
ϕ (ω )
− 89 o
− 87.2 o
− 92.1o − 164 o
− 216 o
− 234.5 o
− 246 o
− 254 o
− 258 o
ω
30
50
100
ϕ (ω )
− 262 o
− 265 o
− 267.7 o
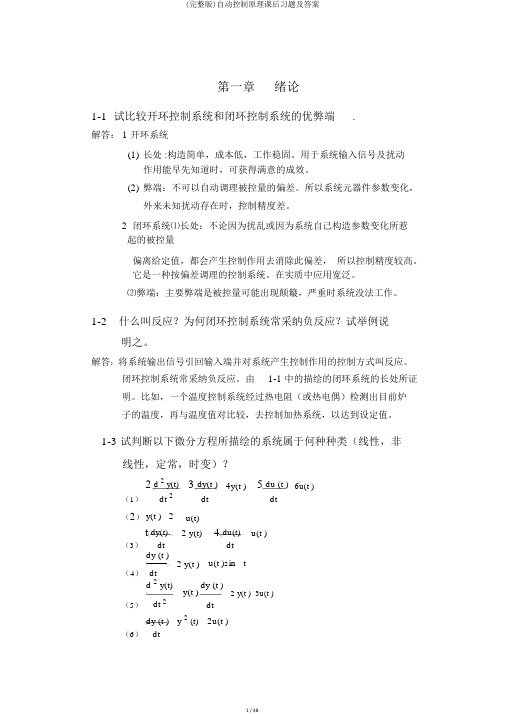
作系统开环对数频率特性图,求得 ω c = 1 ,系统的穿越频率 ω r = 18 系统的幅值裕度和相角裕度为 h =
-26
-20
5-12 已知最小相位系统的对数幅频渐进特性曲线如图 5-50 所示, 试确定系统的开环传递函 数。 解: (a) G ( s ) =
自动控制原理课后习题及答案
第一章绪论1-1 试比较开环控制系统和闭环控制系统的优缺点.解答:1开环系统(1) 优点:结构简单,成本低,工作稳定。
用于系统输入信号及扰动作用能预先知道时,可得到满意的效果。
(2) 缺点:不能自动调节被控量的偏差。
因此系统元器件参数变化,外来未知扰动存在时,控制精度差。
2 闭环系统⑴优点:不管由于干扰或由于系统本身结构参数变化所引起的被控量偏离给定值,都会产生控制作用去清除此偏差,所以控制精度较高。
它是一种按偏差调节的控制系统。
在实际中应用广泛。
⑵缺点:主要缺点是被控量可能出现波动,严重时系统无法工作。
1-2 什么叫反馈?为什么闭环控制系统常采用负反馈?试举例说明之。
解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反馈。
闭环控制系统常采用负反馈。
由1-1中的描述的闭环系统的优点所证明。
例如,一个温度控制系统通过热电阻(或热电偶)检测出当前炉子的温度,再与温度值相比较,去控制加热系统,以达到设定值。
1-3 试判断下列微分方程所描述的系统属于何种类型(线性,非线性,定常,时变)?(1)22()()()234()56()d y t dy t du t y t u t dt dt dt ++=+(2)()2()y t u t =+(3)()()2()4()dy t du t ty t u t dt dt +=+(4)()2()()sin dy t y t u t t dt ω+=(5)22()()()2()3()d y t dy t y t y t u t dt dt ++=(6)2()()2()dy t y t u t dt +=(7)()()2()35()du t y t u t u t dtdt =++⎰解答:(1)线性定常(2)非线性定常(3)线性时变(4)线性时变(5)非线性定常(6)非线性定常(7)线性定常1-4如图1-4是水位自动控制系统的示意图,图中Q1,Q2分别为进水流量和出水流量。
(完整版)自动控制原理课后习题及答案
第一章绪论1-1 试比较开环控制系统和闭环控制系统的优弊端.解答: 1 开环系统(1)长处 :构造简单,成本低,工作稳固。
用于系统输入信号及扰动作用能早先知道时,可获得满意的成效。
(2)弊端:不可以自动调理被控量的偏差。
所以系统元器件参数变化,外来未知扰动存在时,控制精度差。
2闭环系统⑴长处:不论因为扰乱或因为系统自己构造参数变化所惹起的被控量偏离给定值,都会产生控制作用去消除此偏差,所以控制精度较高。
它是一种按偏差调理的控制系统。
在实质中应用宽泛。
⑵弊端:主要弊端是被控量可能出现颠簸,严重时系统没法工作。
1-2什么叫反应?为何闭环控制系统常采纳负反应?试举例说明之。
解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反应。
闭环控制系统常采纳负反应。
由1-1 中的描绘的闭环系统的长处所证明。
比如,一个温度控制系统经过热电阻(或热电偶)检测出目前炉子的温度,再与温度值对比较,去控制加热系统,以达到设定值。
1-3试判断以下微分方程所描绘的系统属于何种种类(线性,非线性,定常,时变)?2 d 2 y(t)3 dy(t ) 4y(t ) 5 du (t ) 6u(t )(1)dt 2 dt dt(2) y(t ) 2 u(t)(3)t dy(t) 2 y(t) 4 du(t) u(t ) dt dtdy (t )u(t )sin t2 y(t )(4)dtd 2 y(t)y(t )dy (t ) (5)dt 2 2 y(t ) 3u(t )dt(6)dy (t ) y 2 (t) 2u(t ) dty(t ) 2u(t ) 3du (t )5 u(t) dt(7)dt解答: (1)线性定常(2)非线性定常 (3)线性时变(4)线性时变(5)非线性定常(6)非线性定常(7)线性定常1-4 如图 1-4 是水位自动控制系统的表示图, 图中 Q1,Q2 分别为进水流量和出水流量。
控制的目的是保持水位为必定的高度。