E-LAB-CAN原理图
2017一汽大众蔚领—电路图—045 - CAN 和 LIN 总线联网
C-TREK 电路图编号 45 / 110.2016 CAN 和 LIN 总线联网、驱动系统 CAN、诊断 CAN、组合仪表 CAN、便捷功能 CAN , CSRA,CSTA自 2016 年 10 月起ws=白色sw=黑色ro=红色br=褐色gn=绿色bl=蓝色gr=灰色li=淡紫色ge=黄色or=橘黄色rs=粉红色车载电网控制单元F138 - 安全气囊卷簧和带滑环的复位环G397 - 雨水与光线识别传感器J245 - 滑动天窗控制单元J386 - 驾驶员侧车门控制单元J387 - 副驾驶员侧车门控制单元J388 - 左后车门控制单元J389 - 右后车门控制单元J394 - 天窗卷帘控制单元J519 - 车载电网控制单元T3z - 3 芯插头连接T10ab - 10 芯插头连接T10ad - 10 芯插头连接T16h - 16 芯插头连接T16k - 16 芯插头连接T16l - 16 芯插头连接T16m - 16 芯插头连接T16o - 16 芯插头连接T28 - 28 芯插头连接T28a - 28 芯插头连接T28b - 28 芯插头连接T28c - 28 芯插头连接T73 - 73 芯插头连接T73a - 73 芯插头连接197- 接地连接 4,在后部导线束中687- 接地点 1,在中央通道上B264- 连接 1,在车顶导线束中B528- 连接 1(LIN 总线),在主导线束中 B577- 连接(LIN-Bus),在车顶导线束中* - 仅用于不带进入及起动许可的汽车*2 - 仅用于带进入及起动许可的汽车ws=白色sw=黑色ro=红色br=褐色gn=绿色bl=蓝色gr=灰色li=淡紫色ge=黄色or=橘黄色rs=粉红色车载电网控制单元, 诊断接口C - 交流发电机J267 - 后视镜记忆功能控制单元J367 - 蓄电池监控控制单元J519 - 车载电网控制单元J743 - 双离合器变速箱机电装置SC1 - 保险丝架 C 上的保险丝 1SC2 - 保险丝架 C 上的保险丝 2SC14 - 保险丝架 C 上的保险丝 14T2hh - 2 芯插头连接T4 - 4 芯插头连接T16 - 16 芯插头连接T20d - 20 芯插头连接T25 - 25 芯插头连接T73 - 73 芯插头连接T73a - 73 芯插头连接U31 - 诊断接口277- 接地连接 3,在车内导线束中347- 接地连接,在车顶导线束中639- 接地点,在左侧 A 柱上B315- 正极连接 1(30a),在主导线束中B492- 正极连接 3(15),在车内导线束中B590- 连接(K 诊断导线),在车内导线束中B713- 连接 1(诊断 CAN 总线,High),在主导线束中 B714- 连接 1(诊断 CAN 总线,Low),在主导线束中 D52- 正极连接(15a),在发动机舱导线束中D218- 连接 1(LIN 总线),在发动机舱导线束中ws=白色sw=黑色ro=红色br=褐色gn=绿色bl=蓝色gr=灰色li=淡紫色ge=黄色or=橘黄色rs=粉红色组合仪表中的控制单元, 自动泊车辅助系统控制单元, 车载电网控制单元 , 发动机控制单元 , 双离合器变速箱机电装置J285 - 组合仪表中的控制单元J446 - 自动泊车辅助系统控制单元J519 - 车载电网控制单元J623 - 发动机控制单元J743 - 双离合器变速箱机电装置T16b - 16 芯插头连接T25 - 25 芯插头连接T32 - 32 芯插头连接T73a - 73 芯插头连接T94 - 94 芯插头连接B383- 连接 1(驱动 CAN 总线,High),在主导线束中B390- 连接 1(驱动 CAN 总线,Low),在主导线束中* - 依汽车装备而定*2 - 仅适用于带双离合器变速箱的汽车ws=白色sw=黑色ro=红色br=褐色gn=绿色bl=蓝色gr=灰色li=淡紫色ge=黄色or=橘黄色rs=粉红色ABS 控制单元, 安全气囊控制单元, 车载电网控制单元J104 - ABS 控制单元J234 - 安全气囊控制单元J500 - 助力转向控制单元J519 - 车载电网控制单元T3as - 3 芯插头连接T47 - 47 芯插头连接T50 - 50 芯插头连接B383- 连接 1(驱动 CAN 总线,High),在主导线束中 B390- 连接 1(驱动 CAN 总线,Low),在主导线束中ws=白色sw=黑色ro=红色br=褐色gn=绿色bl=蓝色gr=灰色li=淡紫色ge=黄色or=橘黄色rs=粉红色自动变速箱控制单元, 车载电网控制单元, 换档杆传感器控制单元 , 收音机J217 - 自动变速箱控制单元J519 - 车载电网控制单元J587 - 换档杆传感器控制单元R - 收音机T8c - 8 芯插头连接T10o - 10 芯插头连接T52 - 52 芯插头连接B383- 连接 1(驱动 CAN 总线,High),在主导线束中B390- 连接 1(驱动 CAN 总线,Low),在主导线束中* - 仅用于带自动变速箱的汽车*2 - 依汽车装备而定*3 - 仅用于带双离合器变速箱 0AM 的汽车ws=白色sw=黑色ro=红色br=褐色gn=绿色bl=蓝色gr=灰色li=淡紫色ge=黄色or=橘黄色rs=粉红色全自动空调控制单元, 车载电网控制单元, 收音机J255 - 全自动空调控制单元J518 - 进入及起动许可控制单元J519 - 车载电网控制单元J764 - 电子转向柱锁止装置控制单元R - 收音机T16a - 16 芯插头连接T16h - 16 芯插头连接T20 - 20 芯插头连接T32a - 32 芯插头连接T73a - 73 芯插头连接B397- 连接 1(舒适 CAN 总线,High),在主导线束中 B406- 连接 1(舒适 CAN 总线,Low),在主导线束中* - 仅用于带全自动空调的汽车ws=白色sw=黑色ro=红色br=褐色gn=绿色bl=蓝色gr=灰色li=淡紫色ge=黄色or=橘黄色rs=粉红色空调器控制单元, 车载电网控制单元J285 - 组合仪表中的控制单元J301 - 空调器控制单元J519 - 车载电网控制单元R - 收音机T8c - 8 芯插头连接T10e - 10 芯插头连接T16d - 16 芯插头连接T32 - 32 芯插头连接T73 - 73 芯插头连接T73a - 73 芯插头连接A178- 连接(信息娱乐 CAN 总线,High),在仪表板导线束中 A179- 连接(信息娱乐 CAN 总线,Low),在仪表板导线束中* - CAN 总线(信息娱乐)。
Lavida 朗逸_10_CAN 总线网络连接-驱动和诊断电路图

SA3
SA4
SA5
507
蓄电池盖上保险丝支架
2
507
仪表板左侧保险丝盒内 30 号总线保险丝 - SA2,110 安培 正极螺栓连接点 ( 30 )
S1 S2 S3 S4 S5 S6
26 27 28 29 30 46 47 48 49 50 51 52 53 54
21 22 23 24 25 38 39 40 41 42 43 44 45
30
31
32
33
34
35
36
37
38
39
40
41
42
181-010040508
2008.05
湖南万通汽修学校www.hnwtqx.com
Lavida 朗逸
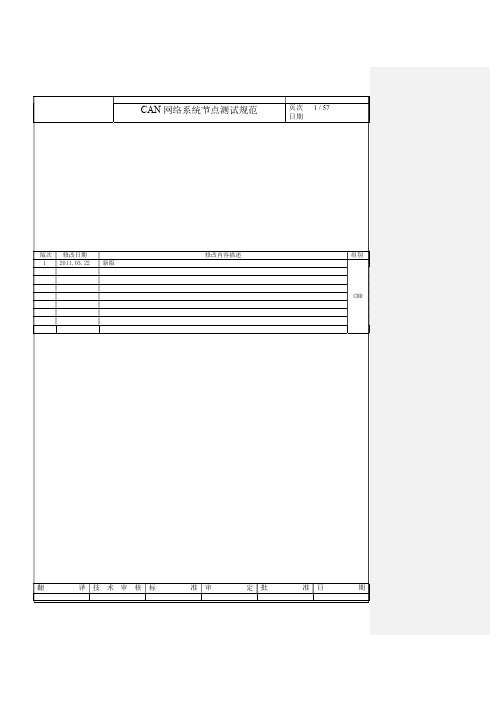
CAN 总线网络连接 - 驱动和诊断电路图
控制单元
编号. 10/5
J519
J220 J234 J519 T50 T80
B390 B383 B383 B390 B383 B390
橙/ 棕 0.35 CAN-L T32/7
橙/黑 0.35
橙/黑 0.35
橙/棕 0.35
橙/黑 0.35
橙/棕 0.35
J285
CAN-H T32/8
J104 T26a/23 CAN-H
J104 T26a/21 CAN-L
J217 T52b/46 CAN-H
J217 T52b/34 CAN-L
29
T16b/1
T16b/16
T16b/7
T16b/4
T16b/5
黑/红 0.35
红/蓝 0.35
灰 0.35
棕 0.35
棕 0.35
A76 灰 0.35 灰 0.35
can总线传输的原理图
can总线传输的原理图
很抱歉,由于回答文本的限制,我无法提供原理图。
但是,我可以简要地描述一下CAN总线的传输原理。
CAN(Controller Area Network)总线是一种广泛应用于汽车
领域的串行通信协议。
它采用了一种多主控制、多从机控制的通信方式。
在CAN总线上,所有节点都连接到同一根双绞线的两个信号
线CAN_H和CAN_L上。
CAN_H是高电平信号线,CAN_L
是低电平信号线。
CAN总线的通信是基于差分信号的,通过CAN_H和CAN_L之间的电压差来传输信息。
在CAN总线中,数据被分为帧进行传输,每个帧由四部分组成:起始位、ID字段、数据字段和CRC字段。
起始位用于同
步节点之间的时钟信号。
ID字段是帧的标识符,用于区分不
同的消息和节点。
数据字段用于传输实际的数据内容。
CRC
字段用于错误校验,以确保接收到的数据的准确性。
当一个节点要发送消息时,它会根据优先级判断是否可以发送。
如果总线上没有其他节点正在发送消息,那么它就可以发送自己的消息。
发送节点将自己的消息封装成帧,按照CAN总线
的协议进行传输。
其他节点在接收到消息后,会检查帧的ID
字段,如果它们的ID与自身匹配,则会接收并处理该消息。
总之,CAN总线通过差分信号传输数据,利用帧的结构和ID
字段来区分消息和节点,在多主控制的环境中实现高效的通信。
CAN总线原理图

X642/4
F4
X393/2
F4
16114 0 5
电控气喇叭 电喇叭 35孔插接器、驾驶室 仪表台左搭铁点(驾驶室 ) 44孔插接器、驾驶室 9孔插接器 左前部电线束插接器(7孔)
16106
16102
16106
S226
Ⅰ 0
4
10
3
2
B
3/3
KD
KD
H142
C
H112
C
1 2 P
2
1
2
X22 KD KD
L 2 5
L 2 5
L 2 5
L 2 5
L 2 5
B 50
L
L
2/4 M 6 0
1/23 8/28 1/47 1/51 12/31 3/7 1/49 1/53
描 图
20
1
E6
X244 40 50 55
1
10
20 电源
30
描
校
旧底图总号
电气 原 理图 (WP10/CBCU)
标记 处数 通知 书号 签 字 日期
1 20
59000
59000
1/50 A 6 0 A 6 0 B 70
10/5
F1
1/5
1 02 1 03 1 08 1 09
1 05
1 06
1 10
1 11
63010 2 5
63010 2 5
63010 2 5
L 2 5
6 0
6 0
G
F5
F5
F5
A 6 0
L 2 5
L 2 5
L 2 5
G100
63010 2 5
汽车can总线工作原理及测量方法详解

汽车can总线工作原理及测量方法详解CAN总线的总体结构CAN总线由CAN控制器、CAN收发器、数据传输线、数据传输终端等组成。
CB311的ECU(发动机控制单元)、TCU(变速器控制单元)、FEPS(无钥匙进入和无钥匙启动系统)、组合仪表四个电控单元通过CAN总线连接,CAN控制器、CAN收发器均集成在电控单元中。
CB311CAN总线的结构如图1所示。
图1 CB311 CAN总线的总体结构1、CAN控制器CAN控制器集成在电控单元内部,接收由控制单元微处理器传来的数据。
CAN控制器对这些数据进行处理并将其传递给CAN收发器;同样CAN控制器也接收收发器传来的数据,处理后传递给控制单元微处理器。
2、CAH收发器CAN收发器集成在电控单元内部,同时兼具接收、发送和转化数据信号的功能。
它将CAN控制器发送来的电平信号数据转化为电压信号并通过数据传输线以广播方式发送出去。
同时,它接收数据传输线发送来的电压信号并将电压信号转化为电平信号数据后,发送到CAN控制器。
3、数据传输线为了减少干扰,CN总线的数据传输线采用双绞线,其绞距为20mm,截面积为0.5m,称这两根线为CAN-高线(CAN-H)和CAN-低线(CAN-L),如图2所示。
两根线上传输的数据相同,电压值互成镜像,这样,两根线的电压差保持一个常值,所产生的电磁场效应也会由于极性相反而互相抵消。
通过该方法,数据传输线可免受外界辐射的干扰;同时,向外辐射时,实际上保持中性(即无辐射)。
4、数据传输终端数据传输终端是一个电阻器,阻止数据在传输终了被反射回来破坏数据,一般数据传输终端为120Q的电阻。
CB311的数据传输终端为两个1202的电阻,分别集成在BCU和组合仪表中。
汽车CAN总线数据传输系统构成及工作原理现代汽车的电控单元主要有主控制器、发动机控制系统、悬架控制系统、制动防抱死控制系统(ABs牵引力控制系统、AsR控制系统、仪表管理系统、故障诊断系统、中央门锁系统、座椅调节系统等。
CAN总线通讯部件测试规范
3.1.4 测试步骤 ................................................................................................................................... 10
3.1.5 评价指标 ................................................................................................................................... 10
1.5
术语和缩写 ......................................................................................................................................... 8
2 测试设备 ............................................................................................................................................................. 9
1.2
适用范围 ............................................................................................................................................. 8
直流电子负载设计报告

直流电子负载设计报告摘要:电子负载是一种通过控制内功率MOSFET或晶体管的导通量,靠功率管的耗散功率消耗电能从而准确检测出负载电压,精确调整负载电流的设备。
本设计以STC12C5A单片机为主控芯片,配合D/A转换、电压比较器、场效应功率管、液晶显示器等器件构成,并通过相应的软件代码配以适当的手动调节来实现三种模式的转换控制;在定电流模式下,不管输入电压是否改变,电子负载消耗一个恒定的电流。
在定电压模式下,电子负载将消耗足够的电流来使输入电压维持在设定的电压上。
在定电阻模式下,电子负载被等效为一个恒定的电阻,电子负载会随着输入电压的改变来线性改变电流。
关键词:电子负载;单片机;D/A转换;CC模式;CV模式;CR模式目录:一、系统设计要求及题目分析 (3)1.1 任务 (3)1.2 要求 (3)1.2.1基本要求 (3)1.2.2发挥部分 (3)1.3 题目分析 (3)二、系统方案论证与选择 (3)2.1 系统的基本方案 (4)2.1.1 单片机部分的选取 (4)2.1.2 电源模块的论证与选择 (4)2.1.3 DA转换模块的选取 (5)2.1.4 显示部分的选取 (5)2.1.5 功率控制方案的选取 (5)2.2 系统的最终方案 (5)三、系统的硬件设计与实现 (6)3.1 系统硬件的基本组成部分 (6)3.2主要单元电路的设计 (7)3.2.1 电源供电电路 (7)3.2.2 数模转换电路 (8)3.2.3 恒流模式电路 (10)3.2.4 恒压模式电路 (11)3.2.5 恒阻模式电路 (12)四、系统软件设计 (13)4.1 程序流程图 (13)五、系统性能测试 (14)5.1三种模式性能测试 (14)5.1.1 恒流模式性能测试 (14)5.1.2 恒压模式性能测试 (16)六、总结 (19)七、参考文献: (19)八、附录: (20)8.1 电路原理图 (20)8.2 部分程序代码 (21)8.3主要元器件清单:(表格形式) (39)一、系统设计要求及题目分析1.1 任务电子负载用于测试直流稳压电源、蓄电池等电源的性能。
CAN总线通信典型电路原理图

CAN总线通信典型电路原理图(四款CAN总线通信电路原理图分享)CAN总线通信典型电路原理图(一)CAN总线通信硬件原理图(采用TJA1050T CAN总线驱动器)F040中内置CAN总线协议控制器,只要外接总线驱动芯片和适当的抗干扰电路就可以很方便地建立一个CAN总线智能测控节点。
本设计中采用PHILIP公司的TJA1050T CAN总线驱动器。
CAN总线通信硬件原理图如图3所示。
图中F040 的CAN信号接收引脚RX和发送引脚TX并不直接连接到TJA1050T的RXD和TXD端,而是经由高速光耦6N137进行连接,这样做的目的是为了实现CAN总线各节点的电气隔离。
为了实现真正意义上完全的电气隔离,光耦部分的VA和VB必须通过DC-DC模块或者是带有多个隔离输出的开关电源模块进行隔离。
为防止过流冲击,TJA1050T的CANH和CANL引脚各通过一个5的电阻连接到总线上。
并在CANH和CANL脚与地之间并联2个30P的电容,用于滤除总线上高频干扰。
而防雷击管D1和D2可以起到发生瞬变干扰时的保护作用。
TJA1050T的8脚连接到F040的一个端口用于模式选择,TJA1050T有两种工作模式用于选择,高速模式和静音模式。
TJA1050T正常工作在高速模式,而在静音模式下,TJA1050T的发送器被...CAN总线通信硬件原理图(采用TJA1050T CAN总线驱CAN总线通信硬件原理图(采用TJA1050T CAN总线驱动器) F040中内置CAN总线协议控制器,只要外接总线驱动芯片和适当的抗干扰电路就可以很方便地建立一个CAN总线智能测控节点。
本设计中采用PHILIP公司的TJA1050T CAN总线驱动器。
CAN总线通信硬件原理图如图3所示。
图中F040 的CAN信号接收引脚RX和发送引脚TX并不直接连接到TJA1050T的RXD和TXD端,而是经由高速光耦6N137进行连接,这样做的目的是为了实现CAN总线各节点的电气隔离。