A 机器人系统输入输出功能描述
工业机器人结构原理
工业机器人结构原理工业机器人是一种可以执行特定任务的智能机械设备。
它们通常由多个主要部分组成,包括机械结构、控制系统、执行器和传感器。
机械结构是工业机器人的重要组成部分,它为机器人提供了身体支持和运动能力。
通常,机械结构由连杆、关节和框架等元件组成。
连杆用于连接不同的关节,使机器人能够执行复杂的动作。
关节是机器人的可动连接点,允许机械结构在不同的方向上旋转或运动。
框架则起到支撑作用,保证机械结构的稳定性和可靠性。
控制系统是控制工业机器人动作和功能的核心。
它通常由硬件和软件两部分组成。
硬件包括中央处理器、存储器、输入输出接口和电源等。
中央处理器是控制系统的主要组成部分,它接收和处理来自传感器的输入信号,并发送指令给执行器。
存储器用于存储程序和数据,以及记录机器人的状态信息。
输入输出接口用于与外部设备进行通信,例如与计算机或其他机器人进行数据交换。
电源则提供所需的能量给控制系统。
执行器是机器人的执行部件,它们负责将控制系统发送的指令转化为动态的机械运动。
常见的执行器包括电动机、液压缸和气动缸等。
电动机是最常用的执行器,它通过电能转变为机械能,驱动机械结构实现各种动作。
液压缸和气动缸则利用液体和气体的压力来实现运动控制,适用于一些需要大力矩或冲击力的操作。
传感器是机器人的感知装置,它们用于获取外部环境的信息,并将信息传递给控制系统。
常见的传感器包括光电传感器、压力传感器、温度传感器和力传感器等。
光电传感器用于检测物体的位置和距离,压力传感器用于测量力的大小,温度传感器用于监测环境的温度变化,力传感器则可测量机器人施加的力。
综上所述,工业机器人的结构原理包括机械结构、控制系统、执行器和传感器等多个方面。
这些部分相互配合,使机器人能够进行复杂的动作和任务执行。
ABB机器人系统输入输出信号解释
系统输出 Auto On Backup Error Backup in Progress
Cycle Onor Mechanical Unit Active Mechanical Unit Not Moving Motor Off Motor On Motor Off State Motor On State Motor Supervision On Motor Supervision Triggered Path Return Region Error
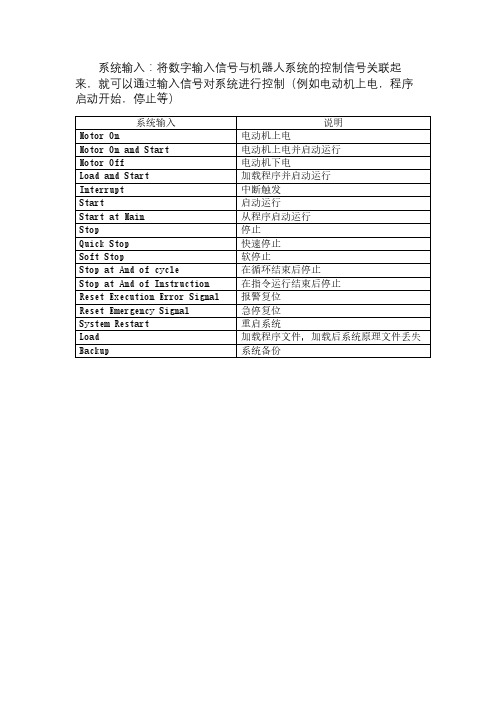
说明 电动机上电 电动机上电并启动运行 电动机下电 加载程序并启动运行 中断触发 启动运行 从程序启动运行 停止 快速停止 软停止 在循环结束后停止 在指令运行结束后停止 报警复位 急停复位 重启系统 加载程序文件,加载后系统原理文件丢失 系统备份
系统输出:机器人系统的状态信号也可以与数字输出信号关联 起来,将系统的状态输出给外围设备作控制只用(例如系统运行模 式、程序执行错误,急停等)
系统输入:将数字输入信号与机器人系统的控制信号关联起 来,就可以通过输入信号对系统进行控制(例如电动机上电,程序 启动开始,停止等)
系统输入 Motor On Motor On and Start Motor Off Load and Start Interrupt Start Start at Main Stop Quick Stop Soft Stop Stop at And of cycle Stop at And of Instruction Reset Execution Error Signal Reset Emergency Signal System Restart Load Backup
Power Fail Error
Production Execution Error Run Chain OK Simulated I/O Task Executing TCP Speed
《机器人虚拟仿真》考试及评价制度
xxxxx职业教育中心学生学业水平考试《机器人虚拟仿真》考试及评价制度本考试大纲以xxxx中心工业机器人应用技术专业《机器人虚拟仿真技术课程标准》为依据,结合我校工业机器人专业教学的实际情况而制定。
一、考试目标与要求考试目标:学业考试以ABB公司的Robostudio软件的操作、建模Smart组件的使用、轨迹离线编程、动画效果的制作、模拟工作站的构建、仿真验证以及在线操作为主要内容,重点考查学生在工业机器人基本操作、应用开发、仿真调试能力,考查学生的团队协作能力和使用Robotstudio仿真软件以及针对不同的机器人应用,设计机器人方案的能力,考查学生分析问题和解决实际问题的能力,考查学生的综合素质,适应职业变化的能力,为进一步学习其它机器人课程打下良好基础。
命题要求:要根据专业核心素养表现水平,恰当设置学生需要完成的具体任务,任务的内容指向明确,不能存在歧义。
要创设基于工业机器典型工作任务的情境,进行有针对性的评价,提炼关键信息和特征,创设信息支持充分的评价情境。
要确保试题的科学性、公平性,把握适当的难度与合理的区分度。
A.了解层次:要求对某一概念、知识内容、某一原理,能够准确再认、再现,具有初步识别、辨认事实或正确描述对象的基本特征的能力,即知道"是什么"。
B.理解层次:要求对某一概念、知识内容,在了解基础上,能够深刻领会相关知识、机器人操作技巧,并借此搭建具体工作站,编写调试机器人程序,辨明正误,即明白"为什么"。
C.掌握层次:要求能够灵活运用相关知识,构建基本仿真工业机器人工作站、创建基本的机器人工具、基本的工作站离线编程与仿真测试,即清楚"怎么办"。
二、考试范围与要求《机器人虚拟仿真技术》考试范围具体内容与要求如下:三、考试形式与试卷结构(一)考试形式采用笔试、技能测试。
满分为100分,考试时间90分钟。
(二)内容比例(三)考试题型考试题型包括单项选择题、判断题、简答题、实践操作等题型。
扫地机器人功能描述

扫地机器人功能描述1.自动导航:扫地机器人使用激光雷达、红外线或摄像头等传感器,能够扫描并建立房间的地图。
通过对地图的分析,机器人可以识别各种家具和障碍物的位置,并选择最佳的路径进行清扫。
它还能够自动跳过楼梯等高度差,以确保安全运行。
2.定时清扫:扫地机器人具有定时清扫的功能,可以根据用户的需求在特定的时间进行清扫。
用户可以在机器人上设置每天、每周或每月的清扫计划,机器人将按照设定的时间自动启动并完成清扫任务。
这种功能使得用户可以在不在家的情况下,仍能保持家居的清洁。
3.自动充电:当扫地机器人的电池电量低于设定值时,它会自动返回到充电基地进行充电,并在充电完成后继续清扫任务。
这种自动充电功能使得扫地机器人具有更长的连续工作时间,并且可以减少人工干预的频率。
4.高效清扫:扫地机器人采用先进的清扫技术,能够高效地清除地面上的灰尘、头发、细小颗粒等。
它通常配备旋转刷和吸尘装置,可以深入地毯和硬地板的表面,彻底清除污垢。
一些高端的扫地机器人还配有反静电刷,可以有效地吸附细小的灰尘和毛发。
5.防撞和防跌落技术:扫地机器人具有智能的避障能力,能够识别并绕过障碍物,如家具、墙角等。
它还配备了防跌落传感器,可以检测到楼梯等高度差,并避免掉落。
这种技术可以减少机器人与物体之间的碰撞,减少损坏的风险。
6.边角清扫:扫地机器人通常具有边角清扫模式,可以有效地清扫墙角和家具边缘等难以到达的区域。
它会使用边刷和旋转刷,将尘埃和杂物从角落和边缘推至进入路径,然后被吸入吸尘装置。
7.智能互联:一些高级扫地机器人具有智能互联功能,可以通过Wi-Fi与智能手机或其他智能设备进行连接。
用户可以使用手机应用程序来控制机器人,设置清扫计划、调整清扫模式、接收清扫进度和报警通知等。
此外,扫地机器人还可以与其他智能家居设备进行协调,实现自动化的家居清扫。
总结:扫地机器人在功能方面具有自动导航、定时清扫、自动充电、高效清扫、防撞和防跌落技术、边角清扫以及智能互联等功能。
最新机器人科技知识竞赛题库
最新机器人科技知识竞赛题库机器人科技知识竞赛一、选择题:1中国科技大学在哪一年组建了国内第一支RobotCup仿真足球队。
(C )A 1996B 1991 C1998 D20002、中国在机器人足球国际赛场上金牌零的突破是在哪一年。
(D)A 1995B 1996C 1998D 19993、我国首届机器人足球比赛是在那里举行的。
(A)A 哈尔滨B 北京C 上海D 广州4、我国最早的机器人是在什么时候?(D)A唐朝 B清朝后期 C解放后 D西周时期5、RoboCup是什么意思?(B)A 机器人足球表演赛 B机器人足球世界杯 C 机器人竞技 D 机器人舞蹈比赛6、1999年日本索尼公司推出犬型机器人叫什么。
(B)A、 SIBOB、 AIBOC、ASIBOD、 QRIO7、机器人三原则是由谁提出的。
(D)A 森政弘B 约瑟夫·英格伯格C 托莫维奇D 阿西莫夫8、世界上第一台机器人Unimate诞生于那年?(C)A 1955B 1987C 1962D 19639、机器人语言是由( A )表示的"0"和"1"组成的字串机器码。
A二进制B十进制C八进制D十六进制10、机器人的英文单词是(C)A、botreB、boretC、robotD、rebot11、国际上最具影响的和两大世界杯机器人足球赛是什么。
(B)AFsker B RobotCup C FIFA D FLL12、下面哪几部电影是与机器人有关的。
(C)A《终结者》 B《变形金刚》 C《功夫熊猫》 D《星球大战》13、机器人能力的评价标准不包括:(C)A智能 B机能C动能D物理能14、下列那种机器人不是军用机器人。
(C)A “红隼”无人机B 美国的“大狗”机器人C 索尼公司的AIBO机器狗D “土拨鼠”15、人们实现对机器人的控制不包括什么?(D)A输入 B输出C程序D反应16.FMC是(D )的简称。
A.加工中心B.计算机控制系统C.永磁式伺服系统D.柔性制造单元。
机器人随堂测试题及答案

机器人随堂测试题及答案一、选择题(每题2分,共20分)1. 机器人的三大核心组成部分包括:A. 传感器、执行器、控制器B. 传感器、处理器、控制器C. 传感器、执行器、处理器D. 处理器、执行器、控制器2. 以下哪个不是机器人传感器的类型?A. 温度传感器B. 压力传感器C. 声音传感器D. 颜色传感器3. 机器人的执行器主要用于:A. 接收外部信号B. 处理信息C. 执行动作D. 存储数据4. 机器人的控制算法中,PID代表:A. 比例-积分-微分B. 比例-积分-差分C. 比例-积分-差值D. 比例-积分-导数5. 以下哪个是机器人编程语言?A. PythonB. JavaC. C++D. 所有选项都是6. 机器人视觉系统的主要功能是:A. 识别物体B. 测量距离C. 导航定位D. 所有选项都是7. 机器人的自主性是指:A. 机器人能够独立完成任务B. 机器人需要人类操作C. 机器人不能自主移动D. 机器人不能自主决策8. 以下哪个不是机器人的分类?A. 工业机器人B. 服务机器人C. 娱乐机器人D. 农业机器人9. 机器人的传感器数据采集后,通常需要进行:A. 数据存储B. 数据分析C. 数据传输D. 数据过滤10. 以下哪个是机器人的发展趋势?A. 智能化B. 微型化C. 网络化D. 所有选项都是二、填空题(每空1分,共10分)1. 机器人的传感器可以感知外部环境的________,并将信息传递给控制器。
2. 机器人的执行器根据控制器的指令进行________,以完成特定的任务。
3. PID控制算法中的“P”代表________,它决定了机器人对误差的响应速度。
4. 机器人编程语言Python具有________和易于学习的特点。
5. 机器人视觉系统可以识别物体的________,如形状、颜色等。
三、简答题(每题5分,共20分)1. 简述机器人在工业生产中的应用。
2. 描述机器人的自主性对现代生活的影响。
ABB机器人系统输入输出功能描述
System Input Action内的功能:1、Motors On:伺服使能On,和控制柜上电机开启是一样的功能;2、Motors Off:伺服使能Off,机器人控制器会在状态变化前停止;3、Star t:启动,机器人程序启动,和示教器上启动按钮功能一致;4、Start at main:在主程序启动,机器人从主程序从头开始并启动;5、Stop:停止,机器人程序停止,和示教器上停止按钮功能一致;6、Quick Stop:快速停止,机器人程序、本体快速停止,和Stop不同的是,快速停止会让机器人本体快速停下来,而停止会有些许的减速过程,两者停止的反应速度不一样;7、Soft Sto p:软停止,机器人程序、本体软停止,机器人本体减速度比较大地停止;8、Stop at end of cycle:程序在执行完整个循环时停止;9、Interrupt:中断,触发机器人中断程序;10、Load and start:从大容量存储装置中载入一段RAPID程序然后启动;11、Reset Emergency stop:复位紧急停止,仅在硬件急停没在按下的情况下有效;12、Reset Execution Error Signal:复位并输出出错信号;13、Motors On and Start:电机使能并启动程序;14、Stop at end of Instruction:程序会在执行完当前指令后停止;15、System Reset:重启系统;16、Load:从大容量存储装置中载入一段RAPID程序;17、Backup:备份,把当前系统内数据、参数备份;18、SimMode:模拟模式;19、Disable backup:避免启动一次备份;20、Limit Speed:极限速度,降低机器人运动速度;21、PP to Main:PP移至Main,与示教器上调试的选项一致;22、Collision Aviodance:激活碰撞避免,仅适用于IRB14000;23、Write Access:获得写权限;24、Enable Energy Saving:启动节能模式;System Output Status内的功能:1、Motor On:当电机使能为On时输出;2、Motor Off:当电机使能为Off时输出;3、Cycle On:执行机器人程序时输出;4、Emergency Stop:当紧急停止被触发时输出;5、Auto On:自动运行时输出;6、Runchain Ok:安全链链OK;7、TCP Speed:TCP运行速度的模拟信号;8、Execution Error:报警出错时输出;9、Motor On State:电机在启动状态;10、Motor Off State:电机在关闭状态;11、Power Fair Error:程序无法在上电失败后从当前位置继续执行时输出;12、Motion Supervision Triggered:触发运动监控;13、Motion Supervision On:运动监控启动;14、Path return Region Error:系统在尝试启动相关机器人程序(不过由于相关机器人离编程路径太远,因此启动将会失败)时输出;15、TCP Speed Reference:TCP编程速度的模拟信号;16、Simulated I/O:系统内至少有一个IO被仿真时输出;17、Mechanical Unit Active:机械单元启动;18、TaskExecution:执行已配置任务时输出;19、Mechanical Unit Not Moving:机械单元不在运动中;20、Production Execution Error:生产发生错误;21、Backup in progress:正在进行备份;22、Backup error:备份失败时输出;23、SimMode:仿真模式下输出;24、Limit Speed:由系统输入信号LimitSpeed触发;25、Collision Avoidance:碰撞避免激活时输出,仅限于IRB14000;26、Write Access:获得写权限;27、Energy Saving Blocked:节能模式下时输出;28、CPU Fan Not Running:中央处理器散热风扇没有启动;29、Temperature Warning:温度过高(95度);30、Absolute Accuracy Active:绝对精度激活时输出;31、SMB Bettery Charge Low:SMB电池电量过低;系统输入:系统输入的意义为当输入点为1时对应的功能动作。
机器人二级考试含答案

机器人二级考试含答案机器人二级考试试题及答案一、选择题(每题2分,共10题,满分20分)1. 机器人的三大核心组成部分包括哪些?A. 感知系统、执行系统、控制系统B. 动力系统、传动系统、控制系统C. 传感器、电机、控制器D. 传感器、执行器、控制器答案:D2. 在机器人编程中,以下哪个不是常用的编程语言?A. PythonB. C++C. JavaD. HTML答案:D3. 机器人的自由度是指什么?A. 机器人可以移动的关节数量B. 机器人可以识别的颜色数量C. 机器人可以执行的任务数量D. 机器人可以感知的环境因素数量答案:A4. 机器人的传感器主要用来做什么?A. 提供能源B. 执行任务C. 接收外部信息D. 控制机器人运动答案:C5. 以下哪个不是机器人的执行器?A. 电机B. 齿轮C. 传感器D. 气缸答案:C6. 机器人视觉系统通常使用哪种类型的传感器?A. 温度传感器B. 距离传感器C. 光学传感器D. 压力传感器答案:C7. 在机器人设计中,以下哪个不是考虑的因素?A. 材料B. 能源效率C. 颜色搭配D. 耐用性答案:C8. 机器人的控制系统通常由哪些部分组成?A. 微控制器和软件B. 传感器和电机C. 电源和电池D. 齿轮和轴承答案:A9. 机器人的传动系统通常包括哪些部件?A. 电机和传感器B. 齿轮和轴承C. 控制器和电源D. 传感器和执行器答案:B10. 机器人的行走机构通常采用哪种设计?A. 轮式B. 履带式C. 腿式D. 所有以上答案:D二、填空题(每题2分,共5题,满分10分)1. 机器人的________是指机器人在没有外部指令的情况下,能够自主完成特定任务的能力。
答案:自主性2. 在机器人设计中,________是决定机器人运动精度和稳定性的关键因素之一。
答案:结构设计3. 机器人的________系统负责将电能转换为机械能,驱动机器人的各个部件运动。
答案:动力4. 机器人的________是指机器人在执行任务时,对环境变化的适应能力和处理突发事件的能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
System Input Action内的功能:
1、Motors On:伺服使能On,和控制柜上电机开启是一样的功能;
2、Motors Off:伺服使能Off,机器人控制器会在状态变化前停止;
3、Star t:启动,机器人程序启动,和示教器上启动按钮功能一致;
4、Start at main:在主程序启动,机器人从主程序从头开始并启动;
5、Stop:停止,机器人程序停止,和示教器上停止按钮功能一致;
6、Quick Stop:快速停止,机器人程序、本体快速停止,和Stop不同的是,快速停止会让机器人本体快速停下来,而停止会有些许的减速过程,两者停止的反应速度不一样;
7、Soft Sto p:软停止,机器人程序、本体软停止,机器人本体减速度比较大地停止;
8、Stop at end of cycle:程序在执行完整个循环时停止;
9、Interrupt:中断,触发机器人中断程序;
10、Load and start:从大容量存储装置中载入一段RAPID程序然后启动;
11、Reset Emergency stop:复位紧急停止,仅在硬件急停没在按下的情况下有效;
12、Reset Execution Error Signal:复位并输出出错信号;
13、Motors On and Start:电机使能并启动程序;
14、Stop at end of Instruction:程序会在执行完当前指令后停止;
15、System Reset:重启系统;
16、Load:从大容量存储装置中载入一段RAPID程序;
17、Backup:备份,把当前系统内数据、参数备份;
18、SimMode:模拟模式;
19、Disable backup:避免启动一次备份;
20、Limit Speed:极限速度,降低机器人运动速度;
21、PP to Main:PP移至Main,与示教器上调试的选项一致;
22、Collision Aviodance:激活碰撞避免,仅适用于IRB14000;
23、Write Access:获得写权限;
24、Enable Energy Saving:启动节能模式;
System Output Status内的功能:
1、Motor On:当电机使能为On时输出;
2、Motor Off:当电机使能为Off时输出;
3、Cycle On:执行机器人程序时输出;
4、Emergency Stop:当紧急停止被触发时输出;
5、Auto On:自动运行时输出;
6、Runchain Ok:安全链链OK;
7、TCP Speed:TCP运行速度的模拟信号;
8、Execution Error:报警出错时输出;
9、Motor On State:电机在启动状态;
10、Motor Off State:电机在关闭状态;
11、Power Fair Error:程序无法在上电失败后从当前位置继续执行时输出;
12、Motion Supervision Triggered:触发运动监控;
13、Motion Supervision On:运动监控启动;
14、Path return Region Error:系统在尝试启动相关机器人程序(不过由于相关机器人离编程路径太远,因此启动将会失败)时输出;
15、TCP Speed Reference:TCP编程速度的模拟信号;
16、Simulated I/O:系统内至少有一个IO被仿真时输出;
17、Mechanical Unit Active:机械单元启动;
18、TaskExecution:执行已配置任务时输出;
19、Mechanical Unit Not Moving:机械单元不在运动中;
20、Production Execution Error:生产发生错误;
21、Backup in progress:正在进行备份;
22、Backup error:备份失败时输出;
23、SimMode:仿真模式下输出;
24、Limit Speed:由系统输入信号LimitSpeed触发;
25、Collision Avoidance:碰撞避免激活时输出,仅限于IRB14000;
26、Write Access:获得写权限;
27、Energy Saving Blocked:节能模式下时输出;
28、CPU Fan Not Running:中央处理器散热风扇没有启动;
29、Temperature Warning:温度过高(95度);
30、Absolute Accuracy Active:绝对精度激活时输出;
31、SMB Bettery Charge Low:SMB电池电量过低;
系统输入:系统输入的意义为当输入点为1时对应的功能动作。
系统输出:系统输出的意义为当该动作执行时,输出点为1。
选择完信号名称、动作后,还要选择扫描类型,有循环扫描Continuous、有单周期扫描Cycle。
根据实际使用选择。