单级倒立摆系统的T-S型模糊控制
一阶倒立摆模糊控制实验报告
一阶倒立摆模糊控制实验报告一、实验目的本实验旨在通过模糊控制方法来控制一阶倒立摆系统,实现摆杆保持竖直的稳定控制。
二、实验原理1. 一阶倒立摆系统一阶倒立摆系统由一个垂直的支撑杆和一个在杆顶端垂直摆动的杆组成。
系统的输入为杆的控制力矩,输出为杆的角度。
系统的动力学方程可以表示为:Iθ''(t) + bθ'(t) + mgl sin(θ(t)) = u(t)其中,I为倒立摆的转动惯量,b为摩擦阻尼系数,θ为倒立摆的角度,m为倒立摆的质量,l为杆的长度,g为重力加速度,u为输入的控制力矩。
2. 模糊控制方法模糊控制方法是一种基于模糊逻辑的控制方法,通过将模糊集合与模糊规则相结合,构建模糊控制器来实现对系统的控制。
在本实验中,可以使用模糊控制器来实现倒立摆系统的稳定控制。
三、实验步骤1. 搭建实验平台,包括倒立摆系统、传感器和执行器。
2. 训练模糊控制器a. 定义模糊集合:根据角度误差和角速度误差定义模糊集合,并确定模糊集合的划分方式。
b. 构建模糊规则:根据经验或系统建模,确定模糊规则。
c. 设计模糊控制器:根据模糊集合和模糊规则,设计模糊控制器,包括模糊推理和模糊解模块。
d. 调整模糊控制器参数:根据系统响应实验,根据控制效果调整模糊控制器参数。
3. 实施模糊控制a. 读取传感器数据:获取倒立摆的角度和角速度数据。
b. 计算控制器输出:根据模糊控制器和传感器数据计算控制力矩的输出。
c. 执行控制器输出:将控制力矩作用在倒立摆上。
4. 监测系统响应:实时监测倒立摆的角度和角速度,判断控制效果。
5. 调整模糊控制器参数:根据实验监测结果,调整模糊控制器参数,以提高控制效果。
四、实验结果分析通过实验,我们可以观察到倒立摆系统在模糊控制下的稳定控制效果。
通过实时监测倒立摆的角度和角速度,可以验证控制器的性能。
实验结果可以通过绘制控制力矩输入和倒立摆角度响应曲线,以及观察系统的稳态误差来分析。
基于模糊控制的一级倒立摆控制系统设计【毕业作品】
BI YE SHE JI(20 届)基于模糊控制的一级倒立摆控制系统设计所在学院专业班级自动化学生姓名学号指导教师职称完成日期年月II摘要倒立摆系统是研究控制理论的典型实验装置,具有价格低廉,结构简单,参数易于调整等优点。
但是倒立摆同时也是一个典型的快速,非线性,多变量,本质不稳定系统,对于其稳定性的控制绝非易事。
也正因为如此,对于倒立摆系统控制方法的研究和开发才具有重要和深远的意义。
目前适用此系统的控制理论包括变结构控制,非线性控制,目标定位控制,智能控制等。
本文根据一级直线倒立摆系统,建立了数学模型,依据模糊控制的相关规则设计了模糊控制规则,并从位移和角度观点出发设计了双模糊控制器,经过仿真调试对重要参数进行不断的调试和优化,最终实现了“摆杆不倒,小车稳住”的总体目标。
对于实物实验系统,本文对构成倒立摆运动控制系统的电机,编码器和运动控制模块进行了比较选择,选择了交流伺服电机,增量式光电编码器和基于DSP技术的运动控制器作为主要的硬件组合,该运动控制器具有良好的性能,可以保证控制的精度。
关键词:倒立摆,模糊控制,系统设计,仿真,稳定IIAbstractInverted pendulum system is the study of the typical experiment device control theory, which is inexpensive, simple structure and easy to adjust the parameters. But it is also a system that typical rapid, nonlinear, many variables, and its essence is not stable, for its stability control is not going to be easy. Also because of this inverted pendulum system control method of the research and development are important and profound significance. At present the system for the control theory including variable structure control, nonlinear control, the goal positioning control, intelligent control, etc.According to the level of linear inverted pendulum system, this paper established the mathematical model, based on the fuzzy control rules we designed its fuzzy control rules, and from the view point of view design displacement and the dual fuzzy controller, through the simulation test of continuing the important parameters of debugging and optimization, and finally achieved "swinging rod, the car is not steady overall goal.For physical experiment system, this paper constitutes inverted pendulum motion control system of motor, encoder and motion control module are compared choice. Choose the ac servo motor, the solid-axes photoelectric encoder and the motion controller based on DSP technology as the main combination of hardware, this controller has good performance, and can ensure the precision of the control.Key words: inverted pendulum,Fuzzy control,System design ,The simulation,stabilityII目录摘要 (I)Abstract.......................................................................................................................................... I I 目录 (III)第一章引言 (1)1.1课题研究目的及意义 (1)1.3倒立摆系统介绍 (3)第二章倒立摆系统建模 (6)第三章模糊控制 (11)3.1概念 (11)第四章基于模糊控制的一级倒立摆系统设计 (15)4.1控制系统部件选择 (15)4.1.1位置传感器选择 (15)4.1.3运动控制模块 (17)4.2 模糊控制器设计 (18)4.2.1 确定模糊控制器的结构 (19)4.2.2位置模糊控制器的设计 (19)4.2.3角度模糊控制器设计 (27)4.3simulink仿真 (28)4.3.1将simulink与模糊控制器相关联 (28)4.3.2进行仿真 (32)结论 (39)III参考文献 (40)致谢 (41)III第一章引言1.1课题研究目的及意义倒立摆系统作为一个本身绝对不稳定的非线性系统,兼具高阶次、多变量、强耦合的特点。
单级倒立摆模糊控制器的设计与实现
单级倒立摆模糊控制器的设计与实现作者:蔡永刚刘慧文来源:《电脑知识与技术》2012年第06期摘要:该文以倒立摆系统为控制对象,建立了单级倒立摆的数学模型,根据模型特点,设计了模糊控制器,并在Matlab-Simulin环境下进行了仿真研究,结果表明该文所设计的模糊控制器是正确有效的。
关键词:倒立摆;模糊控制;仿真中图分类号:TP311文献标识码:A文章编号:1009-3044(2012)06-1369-03倒立摆是日常生活中许多重心在上,支点在下控制问题的抽象模型,是一个典型的非线性、高阶次、多变量、强耦合、自然不稳定的快速系统[1]。
由于本身含有极其丰富和复杂的动力学行为,倒立摆在控制过程中能有效地反映控制中许多抽象而关键的问题,是研究各种控制理论和方法的理想对象和典型装置。
倒立摆的控制目标是使倒立摆这样一个快速不稳定的控制对象,通过引入适当的控制策略使之成为一个稳定系统,物理上表现为把摆稳定竖直在某一位置。
迄今为止,人们已经利用各种控制策略实现了一级到四级的稳定控制,其中模糊控制一直是研究的热点[2]。
本文针对单级倒立摆的稳定控制问题,对模糊控制在单级倒立摆中的应用进行研究,并在仿真环境下最终实现了单级倒立摆的稳定控制。
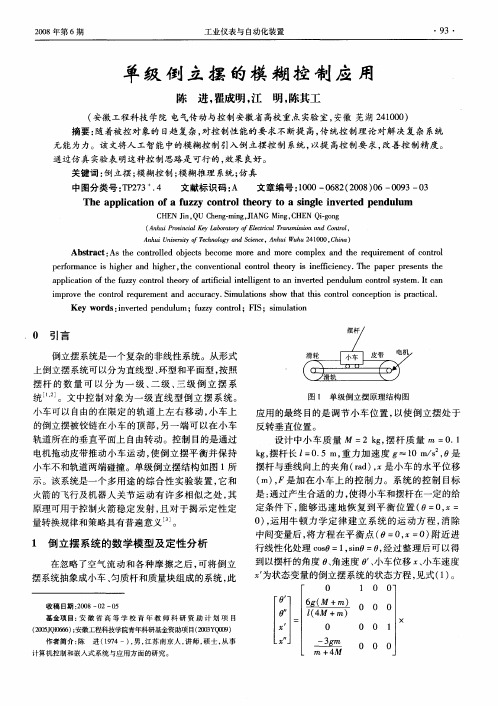
1单级倒立摆的数学模型单级倒立摆实验系统主要由小车、摆杆、导轨构成,其结构如图1所示。
倒立摆系统的基本原理为:当摆杆偏离直立位置时,通过驱动电机带动小车往复运动,以保持倒立摆摆杆始终处于竖直向上的状态。
图1单级倒立摆系统结构图为了分析方便,忽略一些次要因素。
假设:(1)摆杆为刚体;(2)忽略各种摩擦;(3)皮带不打滑,无伸长;(4)导轨中心为位移的原点,摆杆竖直向上为摆角的原点。
由分析力学中的Lagrange方程推导出单级倒立摆的数学模型为[3]从单级倒立摆的状态方程可以看出,由于M、N和G包含状态变量θ和θ.,M-1与θ和θ.存在严重的非线性关系,单级倒立摆是一个高度非线性的系统。
T-S模糊模型
传统模糊系统:
变量模糊化 糊值
逻辑推理 解模糊化
模
T-S 模糊模型:
系统模型模糊化 逻辑推理 解模糊化
线
性函数
如图用3条线性规则逼近原函数。输入-输出对的数据已知,这
里假定只有1个输入变量,它被划分为3个模糊集合,即大、中、 小。可描述的规则如下:
Y R1
R3
R2 X
4 4.5 7.0 8.5 10
反模糊化 工业控制中广泛使用的反模糊方法为加权平均法,则可得整个系统的
状态方程为:
例:假设已知三条T-S模糊规则,分别为R1、R2、R3,如下:
R1: if x1 is mf1 and x2 is mf3 then y1=x1+x2;
R2: if x1 is mf2 then y2=2x1; R3: if x2 is mf4 then y3=3x2。 其中模糊集合mf1、mf2、mf3、mf4的隶属函数,都视为简单
4
7 8.5
T-S 模糊模型的基本做法是用线性状态空间模型作为后件来表
达每条语句所表征的局部动态特性,则全局的模糊模型就由这 些线性模型通过隶属函数综合而成,全局模型是一个非线性模 型,利用模糊逻辑系统的非线性映射能力,就可以逼近一个复 杂的非线性系统,而且能够对定义在一个致密集上的非线性系 统做到任意精度上的一致逼近。 T-S 模糊模型的模糊关系 模糊控制规则是一个多条语句,它可以表示为U×V上的模糊子 集,即模糊关系R:
u4 3w)1*按y1加w1w权2w*平2y均2w法3w3(* yw3tav0.e0r9)3705计.0*91算3775总0.输20.*2出240:.307.3575*15 17.972
T-S模糊模型用于倒立摆模糊控制
单级倒立摆的模糊控制应用
0 引 言
倒 立摆 系统 是一 个复 杂的 非线性 系统 。从 形式
上倒立 摆 系统可 以分 为直线 型 、 环型 和平 面型 , 照 按 摆 杆 的 数 量 可 以 分 为 一 级 、 级 、 级 倒 立 摆 系 二 三
统 ¨ 。文 中控 制 对 象 为一 级 直 线 型 倒 立 摆 系 统 。 J 小 车可 以 自由 的在 限定 的轨 道上 左 右 移 动 , 车 上 小
无 能为 力。该 文将人 工智能 中的模 糊控 制 引入倒 立摆 控 制 系统 , 以提 高控 制要 求 , 改善 控 制精 度 。 通过 仿真 实验表 明这种控 制 思路 是 可行 的 , 效果 良好 。 关键 词 : 立摆 ; 倒 模糊控 制 ; 模糊 推理 系统 ; 真 仿 中图分 类号 : P 7 . T 23 4 文献标 识码 : A 文 章编 号 :0 0— 6 2 20 )6— 0 3— 3 10 0 8 (0 8 0 0 9 0
A s atA ecnrl dojcsbc m oea dm r cm lxad terq i met f o t l b t c : st ot l bet eo em r n oe oc o
p ro ma c sh g e n ih r t e c n e t n lc n r lt e r s i e c e c .T e p p r p e e t h e fr n e i i h r a d h g e ,h o v n i a o to h o y i n f in y h a e r s n s t e o i a p iai n o u z o to h o fatfca n elg n oa n e e e d l m o r ls se I a p l t ft f z y c n r lt e r o ri ili tlie tt n i v r d p n u u c nto y tm. tc n c o he y i t i r v h o r lr q r me ta d a c r c S mu ai n h w h tt i o to o c p in i r cia . mp o e t e c nto e u e n n c u a y. i l t s s o t a h s c nr lc n e to s p a tc 1 o Ke y wor ds:n e d p n u u ;f z y c nto ;FI i v  ̄e e d l m u z o rl S;smu ain i lto
基于LMI的T-S模糊控制系统的研究
其中W为规 的 则i 隶属函 W n (( ) 数, F 钆 . )
i= 1
针对 每条 T S模 型规 则 , — 采用 状态 反馈 方法 , 可设
计r 条模 糊 控制 规则 : 控 制 规则 i :
I ( i ,tad 。) 』 a d… ( i Jt ( ) F £ s n ( i ) n ) £s l £s 7 ) l 3
单 级倒 立 摆 系统 是一 种特 殊 的单 力 臂机 器 人 被
控对 象 , 一个 复 杂 的非线 性 系 统 , 控 制器 设 计 应 是 其 该 有 良好 的鲁棒稳定 性 。 线 性矩 阵不 等式 ( ierMa xIe u lyL ) Ln a t q ai ,MI是 H n t
() 2
根 据 模糊 系统 的反 模糊 化 定 义 , 由模 糊 规则 ( ) 1 构
成 的模糊 模 型总 的输 出为
∑W 0 B 】 ) ) [ +
制 量 )使 小 车停 留在 预 定 位 置 , 使 摆 不 倒 下 , , 并 即不 超 过一 预先 定 义 好 的 垂 直偏 离 角 度 范 围嘲 , 图 1 嘲 如
是 近年来 控制 理论 的研究 热点 之 ~ 。实践 证 明 , 有 具
线 性后 件 的 T kg~ u e o 糊模 型 以模糊 规则 的形 a aiS gn 模
式充 分利用 系统 局部 信息 和专 家控 制 经验 , 以任 意 可 精 度逼近 实 际被 控对 象。T S模 糊系统 的稳定 性条件 - 可 以表述 成线性 矩阵不 等式 L 的形 式 , 于 T S模 MI 基 — 糊 模 型 的非 线性 系 统 的鲁 棒稳 定 和 自适 应 控 制 的研 究是 控制理 论研究 的热点 。
基于极点配置的单级倒立摆t-s模糊控制

基于极点配置的单级倒立摆t-s模糊控制
基于极点配置的单级倒立摆T-S模糊控制是一种控制方法,旨在实现单级倒立摆的控制。
T-S模糊控制又称为模糊控制器,是一种具有适应性的控制方法,可以应对非线性系统。
单级倒立摆是指一个质量集中在底部的刚性杆,这个杆可以绕着水平轴旋转,并在其顶端悬挂一个质量。
单级倒立摆是一种经典的非线性控制问题。
极点配置是一种控制系统设计方法,它是基于控制系统的极点位置来调整控制器参数,以达到预期的控制性能。
在基于极点配置的单级倒立摆T-S模糊控制中,控制器的设计包括两个部分。
第一部分是基于极点配置的控制器设计,这个部分主要是确定控制器的极点位置,以实现所需的控制性能。
第二部分是基于T-S模糊控制的控制器设计,这个部分主要是设计模糊规则和隶属函数,以实现在不同状态下的控制。
总体来说,基于极点配置的单级倒立摆T-S模糊控制是一种创新性的控制方法,它可以应对非线性系统的控制问题,并具有良好的控制性能。
基于T-S模型的倒立摆LQR模糊控制
度 , 而影 响 了模 型 的精度 .据 此 , 有 控 制 策略 的 目标 归 纳起 来 有 2个 : 控 制摆 杆 的平 衡 点 位 从 所 ① 置 ; 保 持 摆杆 直 立.由于倒 立摆 是 一强 耦合 系统 , 2 目标 之 间存 在互 相 影 响 、 互 制约 , 同 ② 这 个 相 不 的控制 策 略对 其 实现 程度 有 所 不 同 , 因此 , 目标 的侧 重 点 不 同 , 制 策 略也 相应 不 同.笔 者在 以上 对 控
1 倒 立摆 运 动机 理 分 析 及 其 数 学模 型
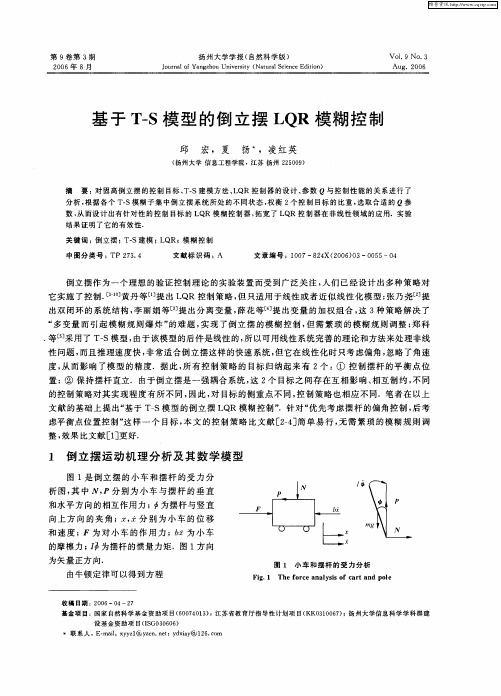
图 1是 倒 立 摆 的 小 车 和 摆 杆 的 受 力 分
析 图 , 中 , 其 P分 别 为 小 车 与 摆 杆 的 垂 直
和水平 方 向 的相互 作用 力 ; 为摆 杆 与竖 直 向上 方 向 的 夹 角 ; , 叠分 别 为 小 车 的 位 移 和 速 度 ; 为 对 小 车 的作 用 力 ; F 为 小 车 的摩 檫力 ; 为摆杆 的惯量 力 矩 .图 1方 向 为矢 量正 方 向.
倒 立摆 作 为一个 理想 的验证 控 制 理论 的实验装 置 而受 到广 泛 关 注 , 们 已 经设 计 出多 种策 略 对 人
它 实施 了控 制 .1 黄丹等 [ 提 出 L [ 删 1 QR控 制 策略 , 只适用 于线 性 或 者 近似 线性 化 模 型 ; 乃尧 [ 提 但 张 2 出双 闭环 的 系统 结 构 , 丽 娟 等[ 提 出分 离 变量 , 花 等[ 提 出变 量 的加 权组 合 , 3 策 略解 决 了 李 3 薛 4 这 种
对 和 分 别取 3 模糊 集 : 个 NB, E, B Z P
( 献 E- 设 声论 域 ( 4 ,5 ,这 不 符 合 本 文 51 一 54)