基于STM32的IEEE标准电脑鼠设计与实现
基于STM32微处理器的IEEE1451标准模块设计
《自动化与仪器仪表》2011年第1期(总第153期)37收稿日期:2010-10-11作者简介:李昔华(1971-),男,讲师,主要从事单片机及其测控系统产品开发与应用工作。
*重庆市科技攻关计划支持项目(CSTC,2009AB2133)资助;重庆市教委项目(KJ100709)。
基于STM32微处理器的IEEE1451标准模块设计*李昔华,胡卫军,王荣秀,曹晓莉(重庆工商大学计算机科学与信息工程学院 重庆,400067)摘 要:IEEE1451标准提出了一种通用的传感器接口标准,解决了传统传感器与各种网络相互不兼容的问题。
本文以IEEE1451标准中IEEE1451.1和IEEE1451.2标准为基础,利用基于ARM Cortex技术的STM32微处理器多功能端口进行IEEE1451各功能模块的标准接口设计。
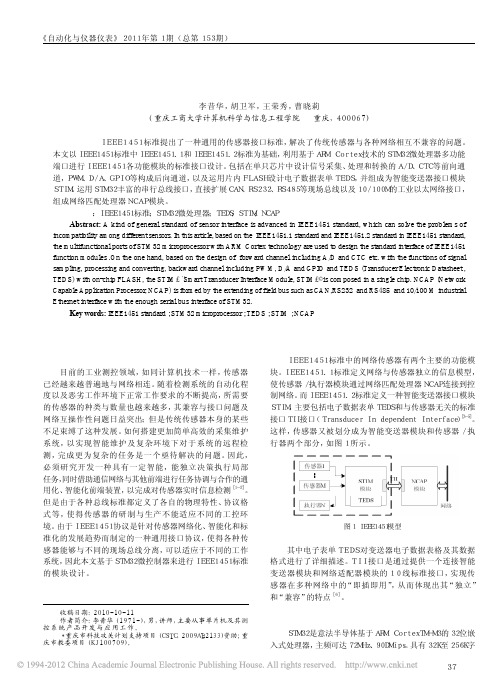
包括在单只芯片中设计信号采集、处理和转换的A/D、CTC等前向通道,PWM、D/A、GPIO等构成后向通道,以及运用片内FLASH设计电子数据表单TEDS,并组成为智能变送器接口模块STIM。
运用STM32丰富的串行总线接口,直接扩展CAN、RS232、RS485等现场总线以及10/100M的工业以太网络接口,组成网络匹配处理器NCAP模块。
关键词:IEEE1451标准;STM32微处理器;TEDS;STIM;NCAPAbstract: A kind of general standard of sensor interface is advanced in IEEE1451 standard, which can solve the problems of incompatibility among different sensors. In this article, based on the IEEE1451.1 standard and IEEE1451.2 standard in IEEE1451 standard,the multifunctional ports of STM32 microprocessor with ARM Cortex technology are used to design the standard interface of IEEE1451function modules .On the one hand, based on the design of forward channel including A/D and CTC etc. with the functions of signal sampling, processing and converting, backward channel including PWM, D/A and GPIO and TEDS (Transducer Electronic Datasheet ,TEDS) with on-chip FLASH, the STIM£¨Smart Transducer Interface Module, STIM£©is composed in a single chip. NCAP (Network Capable Application Processor, NCAP) is formed by the extending of field bus such as CAN,RS232 and RS485 and 10/100 M industrial Ethernet interface with the enough serial bus interface of STM32.Key words: IEEE1451 standard ; STM32 microprocessor ; TEDS ; STIM ; NCAP中图分类号:TP13,U46 文献标识码:A 文章编号:1001-9227(2011)01-0037-030 引 言目前的工业测控领域,如同计算机技术一样,传感器已经越来越普遍地与网络相连。
基于STM32的电脑鼠机器人设计与开发

基于STM32的电脑鼠机器人设计与开发作者:蒙飚严健平来源:《电子技术与软件工程》2016年第06期摘要电脑鼠是一种四轮车形状且具有人工智能的小型机器人,针对电脑鼠体积小、实时性要求高等特点,采用高性能的ARM Cortex-M3架构内核的STM32系列处理器作为电脑鼠硬件控制核心,优化机器人行走和搜寻迷宫控制算法,通过精密红外传感器和执行电机,实现了电脑鼠性能的极大提升。
【关键词】STM32 电脑鼠机器人电脑鼠机器人是一种能够在迷宫中行进、位置记忆、搜寻终点和优化路径等功能,按照电脑鼠竞赛规则,机器人必须在陌生与未知的迷宫环境中以最快速度及最短时间到达终点完成比赛任务以获得胜利。
本文研究的电脑鼠机器人选择了高性能的32位ARM Cortex-M3架构内核的处理器作为控制核心设计了电脑鼠机器人的软硬件系统,实现了电脑鼠机器人系统的稳定快速行走能力、记忆迷宫搜寻轨迹能力和优化最短执行路径能力,相比传统基于8位单片机的电脑鼠系统,极大提升了系统整体性能,同时能够借助本文研究的电脑鼠系统设计案例,进而研究与发明更加复杂的机械控制系统。
1 电脑鼠机器人整体设计方案电脑鼠机器人软硬件系统由基于STM32的核心处理器、电源稳压电路系统、传感器系统、行走电机执行系统、液晶显示系统和无线网络系统六个子模块组成,其中基于STM32的核心处理器子模块是整个电脑鼠机器人的控制中心,负责与其它五个子模块的信息传输,并运行整体系统的软件程序,实现电脑鼠的流程控制、运算优化和数据存储;电源稳压电路系统负责给系统硬件提供稳定可靠的电源,传感器系统让电脑鼠机器人能够感知迷宫周围环境,行走电机执行系统能让电脑鼠机器人快速直行或转弯,液晶显示系统可以通过屏幕让人们获得机器人的各种状态信息,无线网络系统能实现电脑鼠机器人与远程计算机的联网。
电脑鼠机器人整体结构示意图如图1所示。
2 电脑鼠机器人硬件设计电脑鼠机器人的硬件系统核心处理器采用ST公司的STM32F103R8T6,它的时钟频率最高可达72MHz,内置64K的Flash、20K的RAM、12位AD、4个16位定时器、3路USART 通讯口等多种资源,具有极高的性价比。
基于STM32的USB简易鼠标毕业设计

基于STM32的USB简易鼠标毕业设计目录摘要 .............................................. 错误!未定义书签。
Abstract ........................................... 错误!未定义书签。
目录 ............................................................... I II 第1章引言 . (1)1.1 课题背景 (1)1.2 基于STM32的USB鼠标的设计研究方法及目标 (1)1.3 USB鼠标国内外研究现状 (2)第2章 USB协议概述 (3)2.1 USB简介 (3)2.2 USB的拓扑结构 (3)2.3 USB的电气特性 (4)2.4 USB描述符 (4)2.5 USB的包结构 (5)2.5.1令牌包 (5)2.5.2数据包 (6)2.5.3握手包 (6)2.5.4特殊包 (6)2.6 USB的传输类型 (7)第3章 STM32及MDK简介 (8)3.1 STM32简介 (8)3.2 MDK的使用 (8)第4章 USB鼠标的实现 (10)4.1 USB简易鼠标的程序编写 (10)4.2 USB鼠标的运行 (12)4.3 硬件实现 (12)设计总结 (14)附录 (15)附录A main.c (15)附录B usb_desc.c (19)附录C hw_config.c (26)附录D usb_prop.c (38)参考文献 (51)致谢 (52)第1章引言1.1 课题背景USB 接口是串行总线通信端口,支持即插即用,在计算机领域应用非常广泛。
HID设备是一种可以进行人机交互操作的设备,在USB设备中占有重要地位,可以辅助计算机进行各种操作,如常用的电脑摄像头、手写板等设备。
一般USB设备的研发非常困难,不但要严格遵守USB协议,还要编写驱动程序。
基于STM32的迷宫电脑鼠控制系统设计与实现
摘要 :针对电脑 鼠走迷宫的功能要求 , 设 计了一个 两轮智能电脑 鼠,并 详细设计 了其控制 系统。采用两 片S T M 3 2 作为主从控制 器 ,以增强 电脑 鼠实时控制及运算 功能。采用红外传 感器进行测 距 ,选用 具有 精密高速跟踪 能力 的 A D N S - 9 5 0 0 光学传 感器取 代常用 的陀螺仪检测 电脑 鼠位置。进行了电脑鼠走迷宫实验 ,并 可通 过上位机实时监 控电脑鼠行走路线 。结果表明车体运行平 稳灵活 ,控制 系统实 时性强 、控制精度高 ,能够快速搜索迷宫 ,有效 提高了电脑鼠走迷宫 的功能 。
D Oh 1 0 . 3 9 6 9/ j . i s s n . 1 0 0 9 - 9 4 9 2 . 2 0 1 6 . 1 2 . 0 0 1
基于 S T M3 2 的迷宫电脑鼠控制系统设计与实现幸
张月芹 ,尹 涓 ,鞠 欢 ,张博 炜
( 南京航 空航天大学金城 学院 机 电工程 系, 江 苏南京 2 1 1 1 5 6 )
mi c r o mo u s e, a n d d e s i g n e d t h e c o n t r o l s y s t e m i n de t a i l .I n o r d e r t o e n h a n c e t he r e l— a t i me c o n t r o l a n d c o mp u t i n g f u n c t i o n s o f t he
Ab s t r a c t :Ac c o r d i n g t o t h e f u n c t i o n a l r e q u i r e me n t s o f a ml c r o mo u s e wa lk i n g i n s i d e a ma z e, t h e p a p e r p r o du c e d a t wo - wh e e l i n t e l l i g e n t
基于STM32的USB简易鼠标

毕业设计 [论文]题目:基于STM32的USB简易鼠标设计学院:电气与信息工程学院专业:电子信息工程姓名:XXX学号:XXXXXX指导老师:XXX完成时间:2015年06月01日摘要随着设备的越来越智能化,嵌入式计算机大量应用到各种电子设备中,基于嵌入式系统的USB鼠标及键盘的应用也变得越来越广泛。
在本次设计中,研究的是一款基于STM32的USB鼠标,即插即用,免驱动自动识别,很好的解决了鼠标设备智能化和低延迟的设计要求。
由于是基于HID的USB设备,所以编程非常方便,贴近工程实践,应用前景广阔。
嵌入式系统HID,即人机接口设备,是Human Interface Device的缩写。
HID 是计算机周边设备中非常常见的设备类型,是可以直接与进行人交互的USB设备,例如鼠标、摄像头、U盘等。
在种类繁多USB设备中,HID类设备的成本一般情况下是比较低的。
实际上,只要是符合HID标准的设备都是HID设备,不一定非要具有人机交互功能。
最早支持HID设备的计算机操作系统是Windows98系统。
HID 设备的驱动程序内置在这些系统中,不需要单独开发与安装驱动,应用程序可以直接使用这些驱动程序来与设备通信。
近年来,受计算机性能提升和游戏软件等的影响,人们对鼠标的要求越来越高,特别是一些即时作战游戏,人们希望能达到“零”延迟,这就对原来的鼠标技术提出了挑战。
老式的圆孔鼠标早已不再适用,特别是笔记本电脑根本不再设计老式插孔。
随着USB2.0以及USB3.0的不断完善,再加上高速而价廉的单片机,一款基于STM32的USB简易鼠标正是本课题的研究内容。
本文主要研究基于STM32的USB简易鼠标系统的功能、设计思想和实现,以及基于STM32的USB简易鼠标的组成及工作原理,描述了研究该课题的意义和应用价值。
本设计的重点在于USB 协议的HID部分,精通此协议并植入单片机才能实现计算机与鼠标的沟通。
关键词: USB 技术; HID 协议; STM32单片机;鼠标AbstractAs more and more intelligent devices, embedded computers applied to the large variety of electronic devices, embedded systems USB mouse and keyboard applications are becoming more and more widespread.In this design, the study is a based on the STM32 USB mouse, plug and play, driver-free automatic identification, a good solution to the mouse device intelligence and low-latency design requirements.Because it is based on HID USB device, so the programming is very convenient, close to the engineering practice, the application prospects.Embedded systems HID, namely human interface devices, is an abbreviation for Human Interface Device. HID is a computer peripheral device in a very common device types, people can interact directly with the conduct of USB devices, such as a mouse,camera, U disk and so on.In a wide range of USB devices, under HID class devices generally cost is relatively low.In fact, as long as a HID-compliant devices are HID device does not necessarily have to have interactive features.The earliest HID devices supported computer operating system is Windows98 system.HID device drivers built into these systems, the need for separate development and install the driver, an application can use these drivers to communicate with the device.In recent years, the impact of computer and game software performance by, people have become increasingly demanding of the mouse, especially some instant combat game, people want to be able to achieve "zero" delay, which the original mouse technology presents a challenge .Old-fashioned mouse the hole is no longer applicable, especially notebook computers designed simply no longer the old jack.With the continuous improvement USB2.0 and USB3.0, coupled with high speed and low cost microcontroller, a research based on the STM32 USB simple mouse precisely this topic. This article is mainly based on the STM32 USB simple mouse systems design and implementation, as well as easy on the STM32 USB mouse and work principle, it describes the subject of research and practical value.The design focuses on some USB HID protocol, proficient in this agreement and in order to achieve single-chip implanted communication computer mouse.Keywords: USB technology; HID protocol; STM32 microcontroller; mouse目录摘要 (I)Abstract ............................................................ I I 目录 ............................................................... I II 第1章引言 . (1)1.1 课题背景 (1)1.2 基于STM32的USB鼠标的设计研究方法及目标 (1)1.3 USB鼠标国内外研究现状 (2)第2章 USB协议概述 (3)2.1 USB简介 (3)2.2 USB的拓扑结构 (3)2.3 USB的电气特性 (4)2.4 USB描述符 (4)2.5 USB的包结构 (5)2.5.1令牌包 (5)2.5.2数据包 (6)2.5.3握手包 (6)2.5.4特殊包 (6)2.6 USB的传输类型 (7)第3章 STM32及MDK简介 (8)3.1 STM32简介 (8)3.2 MDK的使用 (8)第4章 USB鼠标的实现 (10)4.1 USB简易鼠标的程序编写 (10)4.2 USB鼠标的运行 (12)4.3 硬件实现 (12)设计总结 (14)参考文献 (15)致谢 (16)附录 (17)第1章引言1.1 课题背景USB 接口是串行总线通信端口,支持即插即用,在计算机领域应用非常广泛。
电脑鼠控制系统工作原理及设计方案

电脑鼠控制系统工作原理及设计方案1电脑鼠工作原理电脑鼠周围安装六组红外传感器,分别感知左方、左前方、前方、右前方、右方,发射端发射一定频率的红外线,接收端通过六个方向的反射波来判断是否有障碍物,实时地储存单元格的资料,通过六组红外传感器反馈的迷宫信息,控制电脑鼠完成避障、转弯、加速等动作,运用智能算法对迷宫的部分单元格或全部单元格进行遍历,并将迷宫的信息以有效的数据结构存储,微控制器根据这些记录信息运用迷宫高效算法找到一条最优化路径,从而实现从起点到终点的最大化冲刺。
2 硬件电路设计为完成迷宫探测和冲刺任务,电脑鼠需具备以下各功能模块:ARM微处理器作为控制核心协调各功能模块正常工作;电机及驱动模块实时控制电机启动、制动;红外检测模块负责红外线探测感知;电源为整个系统供电稳定电压,陀螺仪及指南针模块确定电脑鼠方位,根据走过的距离,从而解析出所在坐标。
硬件组成如图1所示。
2.1 电源模块电源调节器件通常使用线性稳压器件(如LM7805),具有输出电压可调、稳压精度高的优点,但是其线性调整工作方式在工作有较大的热损耗,导致电源利用率不高、满足不了便携低功耗需求。
开关电源调节器,不同于线性稳压器件,以完全导通或关断的方式工作,通过控制开关管的导通与截止时间,有效的减少工作中的热损耗,提高了电源利用率。
本设计中电源模块为系统提供三种不同的电压,12V电源用于驱动电机,使用开关式电源LM2596将12V直流电压降到5V给红外模块、人机交互模块供电,再通过AMS1117将5V降到3.3V,供ARM处理器及其他模块使用。
2.2 微处理器模块微处理器是整个控制系统的核心,它完成从红外检测模块获取路径信息,采集瞬时速度,进行数据处理,控制算法运算,输出实时控制量等功能。
为了保证系统的实用性和易扩展性,本控制系统采用意法半导体推出的增强型系列STFM32F103RCT6,STM32F103xx增强型系列使用高性能的ARM Correx-M3 32位的RISC内核,工作频率为72MHz,内置高。
IEEE电脑鼠调试(选作实验)

电脑鼠连续过弯技术
4、实验原理
内外轮的速度变化
电脑鼠连续过弯技术
对比三种转弯方式
原地转
一个转,一个不转
一个快转,一个慢转
电脑鼠的高速运行 三、电脑鼠的高速运行 1、实验目的 在保证运行稳定性的前提下提高运行的极限速度,并修正高速运 行时的姿势。
3、实验重点 在高速中保持电机丌失步以及电脑鼠运行姿势
电脑鼠的高速运行
测试电脑鼠的最高速度和最大加速度
在高速运动时如何修正以下轨迹?
电脑鼠搜索迷宫的策略改进 四、电脑鼠搜索迷宫的策略改进 1、实验目的 提高电脑鼠在比赛中的效率。
2、实验内容 改进已有的搜索法则及冲刺策略提高比赛成绩。
3、实验重点 对比几种法则和策略,选取最优
电脑鼠搜索迷宫的策略改进
电池电压检测
实验原理
VCC = 3 * VADC + VD VCC = 3 * VADC +0.35
电脑鼠连续过弯技术 二、电脑鼠连续过弯技术 1、实验目的 掌握电脑鼠连续过弯技术 2、实验内容 改进电脑鼠的转弯方式,由静止转弯变为连续转弯 并提高转弯的稳定性。 3、实验重点 如何控制转弯前后电脑鼠的所处位置
电脑鼠原理与应用
选作实验
电池电压检测
电脑鼠连续过弯技术 电脑鼠的高速运行
电脑鼠搜索迷宫的策略改进
电池电压检测
一、电池电压检测 1、实验目的 掌握LM3S615上A/D的使用方法。 2、实验内容 使用A/D模块检测电池电压,并用7289 Ex Board模 块显示。 3、实验重点 LM3S615上A/D的使用
完全搜索
时间长
丌完全搜索
?
时间短 路径可能非最短
路径最短
电脑鼠搜索迷宫的策略改进 完全搜索
《2024年基于STM32的智能家居控制系统的设计与开发》范文

《基于STM32的智能家居控制系统的设计与开发》篇一一、引言随着科技的发展,智能家居已经成为人们生活的一部分。
它结合了先进的计算机、网络、通讯及嵌入式系统等技术,通过集中控制和远程管理实现对家庭设备的智能化管理。
STM32作为一款高效的微控制器,具有高性价比和高度集成的特性,为智能家居控制系统提供了理想的技术支持。
本文旨在设计并开发一种基于STM32的智能家居控制系统,实现设备的便捷管理和智能化控制。
二、系统概述基于STM32的智能家居控制系统,由中央控制单元(STM32微控制器)、多个智能家居设备、传感器、以及与互联网连接进行远程管理的功能组成。
其中,STM32微控制器负责设备之间的协调与通信,家居设备与传感器负责采集与处理数据,通过互联网与中央控制系统实现信息共享与交互。
三、硬件设计1. 中央控制单元设计本系统以STM32微控制器为核心,实现系统的中央控制。
通过编程控制智能家居设备的开关、亮度调节等操作。
同时,STM32微控制器通过传感器实时监测家庭环境数据,如温度、湿度等,并据此调整智能家居设备的运行状态。
2. 智能家居设备设计智能家居设备包括照明设备、空调、电视等家电设备。
这些设备通过STM32微控制器的控制,实现智能化的开关、调节等功能。
此外,设备还配备有传感器,如光敏传感器、温度传感器等,实时监测环境数据并反馈给STM32微控制器。
四、软件设计1. 操作系统与编程语言本系统采用嵌入式操作系统,如RT-Thread等,为STM32微控制器提供强大的软件支持。
编程语言采用C语言,具有高效、稳定的特点。
2. 程序架构与功能模块程序架构采用模块化设计,包括主程序模块、通信模块、设备控制模块、传感器数据处理模块等。
主程序模块负责整体控制,通信模块负责设备之间的数据传输,设备控制模块负责家居设备的开关、调节等操作,传感器数据处理模块负责采集并处理环境数据。
五、系统功能与特点1. 功能特点本系统可实现智能家居设备的集中控制和远程管理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于STM32的IEEE标准电脑鼠设计与实现
伯恩;于媛媛
【期刊名称】《价值工程》
【年(卷),期】2011(30)20
【摘要】针对IEEE标准电脑鼠走迷宫的竞赛要求,介绍了一种基于STM32的电脑鼠系统的设计与实现方法.文章对硬件构成和软件算法都做了详细的介绍.该电脑鼠实现了在迷宫内快速稳定的行走及对迷宫最优路径的搜索.%According to Micromouse maze solving competition damands of IEEE criterion, the design and implementation of Micromouse based on STM32 is introduced.This paper has made a description of hardware architecture and software algorithm in detail.The Micromouse has achieved walking rapidly and stably in the maze and the optimal path of a maze search.【总页数】2页(P136-137)
【作者】伯恩;于媛媛
【作者单位】四川大学制造科学与工程学院,成都,610065;四川大学制造科学与工程学院,成都,610065
【正文语种】中文
【中图分类】TP30
【相关文献】
1.基于IEEE标准电脑鼠走迷宫控制算法研究与优化 [J], 郑伟;张永飞
2.基于STM32的迷宫电脑鼠控制系统设计与实现 [J], 张月芹;尹涓;鞠欢;张博炜
3.基于ARM的IEEE标准电脑鼠研究与实现 [J], 方金亮;谈英姿;周怡君
4.基于IEEE标准的电脑鼠走迷宫的智能算法研究 [J], 王斌;张卫钢
5.基于STM32的微电脑鼠对角线冲刺设计与实现 [J], 李红益;张好明;王应海因版权原因,仅展示原文概要,查看原文内容请购买。